
Impacts of Autonomous Vehicles on Traffic Flow Characteristics under Mixed Traffic Environment: Future Perspectives




Abstract
:1. Introduction
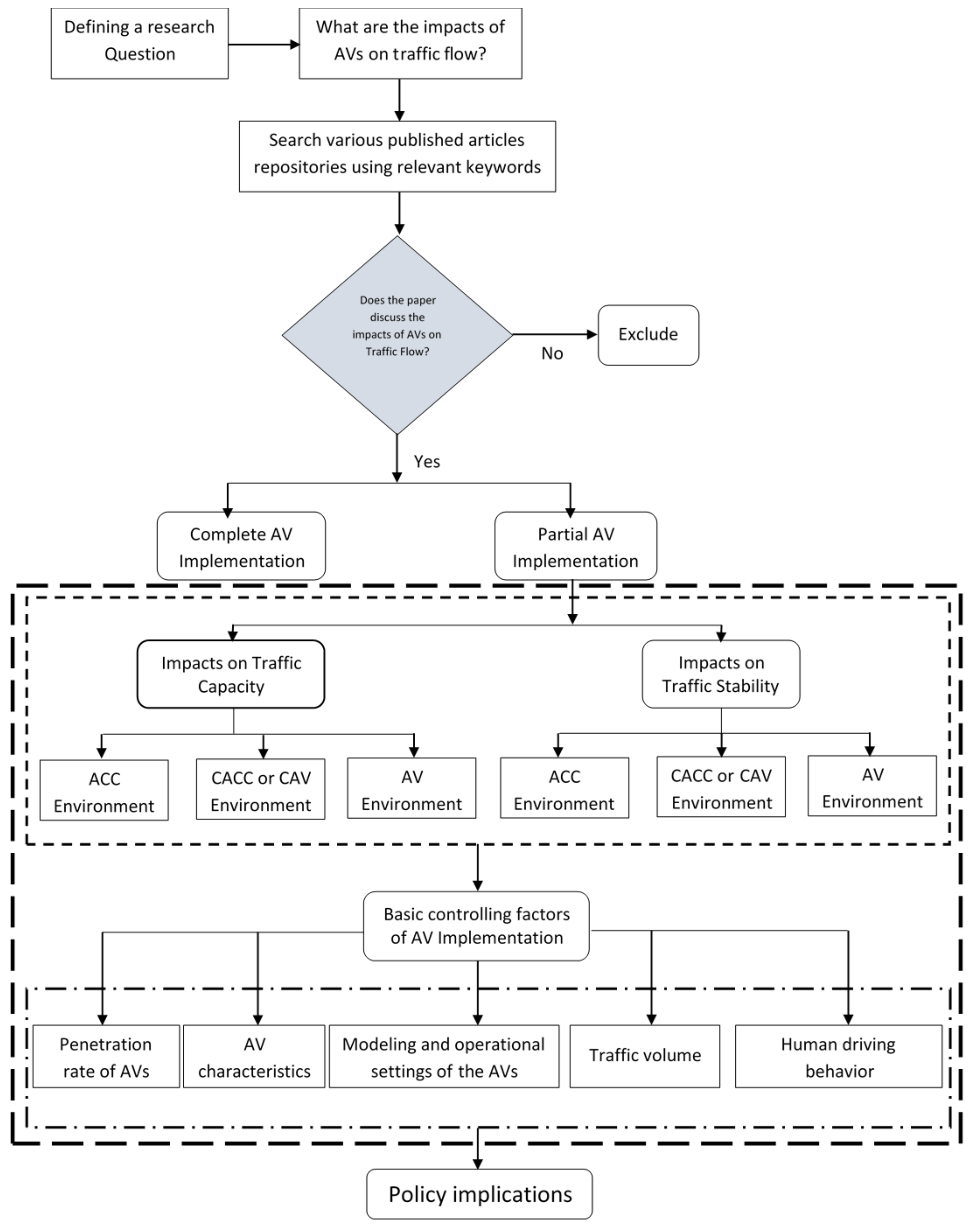
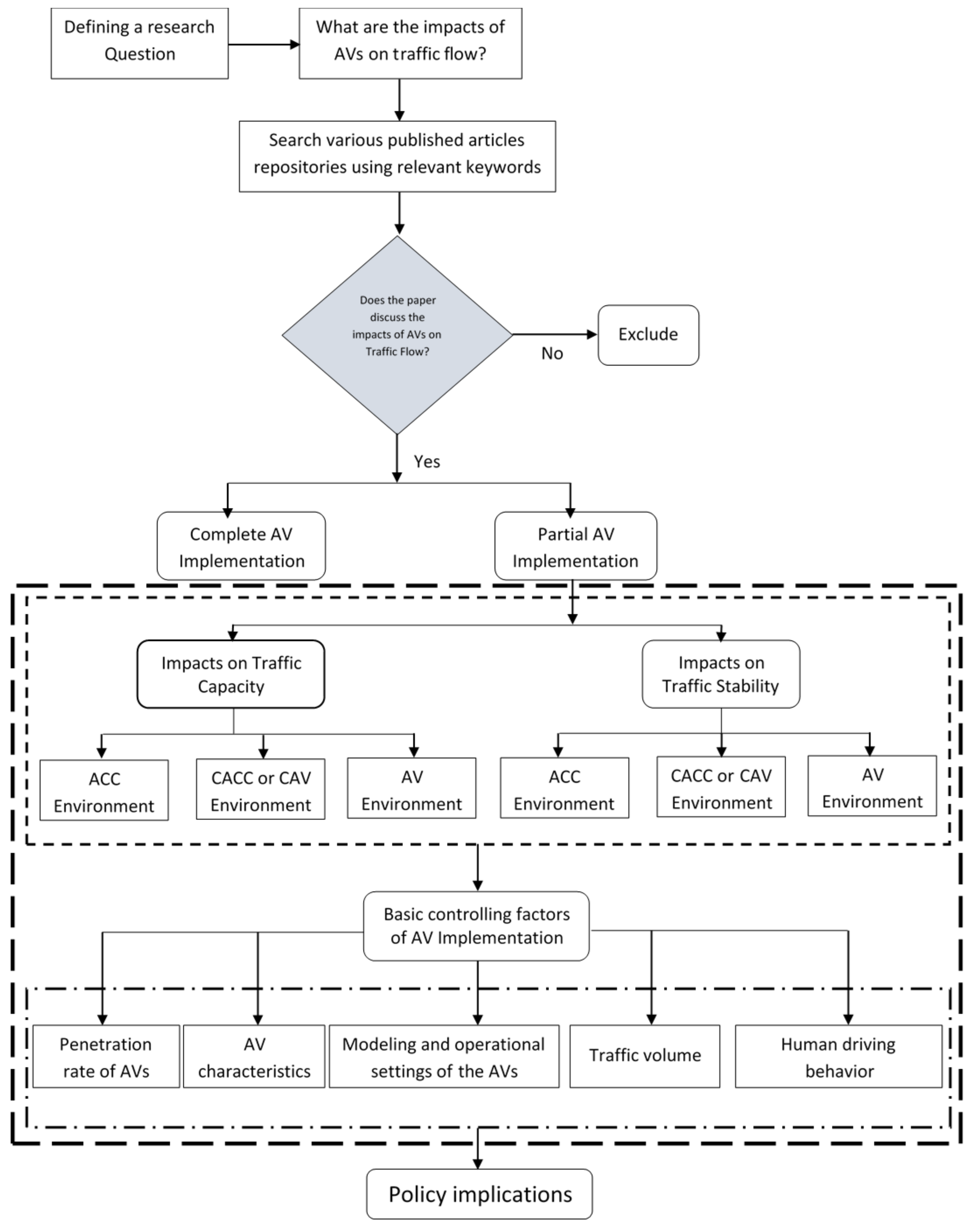
2. Research Methodology
3. Impacts of the Complete AV Implementation
4. Impacts of Partial AV Implementation
4.1. Traffic Capacity
4.1.1. ACC Environment
4.1.2. CACC or CAV Environment
4.1.3. AV Environment
4.2. Traffic Stability
4.2.1. ACC Environment
4.2.2. CACC or CAV Environment
4.2.3. AV Environment
5. Basic Factors Controlling Impacts of AV Implementation in a Mixed Traffic Environment
- Penetration rate of the AVs
- AV characteristics
- Modeling and operational settings of the AVs
- Traffic volume
- Human driving behavior in a mixed traffic environment
5.1. Penetration Rate of the AVs
5.2. AV Characteristics
5.3. Modeling and Operational Settings of the AVs
5.3.1. Modeling of AVs
5.3.2. Operational Settings of the AV
5.4. Traffic Volume
5.5. Human Driving Behavior in a Mixed Traffic Environment
6. Policy Implications
7. Conclusions
- There are uncertainties about the impacts of the full level of AVs, including CAVs, on the traffic flow under mixed traffic conditions. Therefore, further investigation efforts are highly needed under various urban networks levels, including different types of signalized and non-signalized intersections. Additionally, it is recommended to consider various traffic compositions, including different combinations of different types of AVs and RVs.
- In terms of AV modeling, most of the reviewed studies did not consider lane-changing behavior. Therefore, further investigation efforts are needed to evaluate the impacts of lane-changing modeling of different types of AV under a mixed traffic environment.
- The review indicated that still further investigations are needed on human driving behavior under mixed traffic environments considering different types of AVs.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Narayanan, S.; Chaniotakis, E.; Antoniou, C. Factors affecting traffic flow efficiency implications of connected and autonomous vehicles: A review and policy recommendations. Adv. Transp. Policy Plan. 2020, 5, 1–50. [Google Scholar] [CrossRef]
- Olia, A.; Razavi, S.; Abdulhai, B.; AbdelGawad, H. Traffic capacity implications of automated vehicles mixed with regular vehicles. J. Intell. Transp. Syst. 2018, 22, 244–262. [Google Scholar] [CrossRef]
- Lin, Y.; Jia, H.; Zou, B.; Miao, H.; Wu, R.; Tian, J.; Wang, G. Multiobjective Environmentally Sustainable Optimal Design of Dedicated Connected Autonomous Vehicle Lanes. Sustainability 2021, 13, 3454. [Google Scholar] [CrossRef]
- Ye, L.; Yamamoto, T. Modeling connected and autonomous vehicles in heterogeneous traffic flow. Phys. A Stat. Mech. Appl. 2018, 490, 269–277. [Google Scholar] [CrossRef]
- Xiao, L.; Gao, F. A comprehensive review of the development of adaptive cruise control systems. Veh. Syst. Dyn. 2010, 48, 1167–1192. [Google Scholar] [CrossRef]
- Parsa, A.B.; Shabanpour, R.; Mohammadian, A.; Auld, J.; Stephens, T. A data-driven approach to characterize the impact of connected and autonomous vehicles on traffic flow. Transp. Lett. 2020, 1–9. [Google Scholar] [CrossRef]
- Fakhrmoosavi, F.; Saedi, R.; Zockaie, A.; Talebpour, A. Impacts of Connected and Autonomous Vehicles on Traffic Flow with Heterogeneous Drivers Spatially Distributed over Large-Scale Networks. Transp. Res. Rec. J. Transp. Res. Board 2020, 2674, 817–830. [Google Scholar] [CrossRef]
- Talebpour, A.; Mahmassani, H.S. Influence of connected and autonomous vehicles on traffic flow stability and throughput. Transp. Res. Part C Emerg. Technol. 2016, 71, 143–163. [Google Scholar] [CrossRef]
- Zhao, L.; Sun, J. Simulation Framework for Vehicle Platooning and Car-following Behaviors Under Connected-vehicle Environment. Procedia Soc. Behav. Sci. 2013, 96, 914–924. [Google Scholar] [CrossRef] [Green Version]
- Yu, G.; Liu, S.; Shangguan, Q. Optimization and Evaluation of Platooning Car-Following Models in a Connected Vehicle Environment. Sustainability 2021, 13, 3474. [Google Scholar] [CrossRef]
- Bailey, N.K. Simulation and Queueing Network Model Formulation of Mixed Automated and Non-Automated Traffic in Urban Settings. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2016. Available online: https://dspace.mit.edu/handle/1721.1/107069 (accessed on 24 August 2021).
- Zeidler, V.; Buck, H.S.; Kautzsch, L.; Vortisch, P.; Weyland, C.M. Simulation of Autonomous Vehicles Based on Wiedemann’s Car Following Model in PTV Vissim. In Proceedings of the 98th Annual Meeting of the Transportation Research Board (TRB), Washington, DC, USA, 13−17 January 2019; pp. 13–17. [Google Scholar]
- Abdulsattar, H.; Siam, M.R.K.; Wang, H. Characterisation of the impacts of autonomous driving on highway capacity in a mixed traffic environment: An agent-based approach. IET Intell. Transp. Syst. 2020, 14, 1132–1141. [Google Scholar] [CrossRef]
- Jones, S.; Philips, B.H. Cooperative Adaptive Cruise Control: Critical Human Factors Issues and Research Questions. 2013. Available online: https://ir.uiowa.edu/drivingassessment/2013/papers/20/ (accessed on 24 August 2021).
- Duarte, F.; Ratti, C. The Impact of Autonomous Vehicles on Cities: A Review. J. Urban Technol. 2018, 25, 3–18. [Google Scholar] [CrossRef]
- Eluru, N.; Choudhury, C.F. Impact of shared and autonomous vehicles on travel behavior. Transportation 2019, 46, 1971–1974. [Google Scholar] [CrossRef] [Green Version]
- Hamadneh, J.; Esztergár-Kiss, D. Impacts of Shared Autonomous Vehicles on the Travelers’ Mobility. In Proceedings of the 2019 6th International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Cracow, Poland, 5–7 June 2019; pp. 1–9. [Google Scholar] [CrossRef]
- Hamadneh, J.; Esztergár-Kiss, D. The Influence of Introducing Autonomous Vehicles on Conventional Transport Modes and Travel Time. Energies 2021, 14, 4163. [Google Scholar] [CrossRef]
- Zheng, F.; Liu, C.; Liu, X.; Jabari, S.E.; Lu, L. Analyzing the impact of automated vehicles on uncertainty and stability of the mixed traffic flow. Transp. Res. Part C Emerg. Technol. 2020, 112, 203–219. [Google Scholar] [CrossRef]
- Zheng, F.; Lu, L.; Li, R.; Liu, X.; Tang, Y. Traffic Oscillation using Stochastic Lagrangian Dynamics: Simulation and Mitigation via Control of Autonomous Vehicles. Transp. Res. Rec. J. Transp. Res. Board 2019, 2673, 1–11. [Google Scholar] [CrossRef]
- Hawkins, J.; Habib, K.N. Integrated models of land use and transportation for the autonomous vehicle revolution. Transp. Rev. 2019, 39, 66–83. [Google Scholar] [CrossRef]
- Calvert, S.C.; Schakel, W.J.; Van Lint, J.W.C. Will Automated Vehicles Negatively Impact Traffic Flow? J. Adv. Transp. 2017, 2017, 1–17. [Google Scholar] [CrossRef]
- Hoogendoorn, R.; van Arem, B.; Hoogendoom, S. Automated Driving, Traffic Flow Efficiency, and Human Factors. Transp. Res. Rec. J. Transp. Res. Board 2014, 2422, 113–120. [Google Scholar] [CrossRef]
- Lu, Q.; Tettamanti, T.; Hörcher, D.; Varga, I. The impact of autonomous vehicles on urban traffic network capacity: An experimental analysis by microscopic traffic simulation. Transp. Lett. 2020, 12, 540–549. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Guo, J.; Taplin, J.; Wang, Y. Characteristic Analysis of Mixed Traffic Flow of Regular and Autonomous Vehicles Using Cellular Automata. J. Adv. Transp. 2017. Available online: https://www.hindawi.com/journals/jat/2017/8142074/ (accessed on 24 August 2021).
- Van Arem, B.; Van Driel, C.J.G.; Visser, R. The Impact of Cooperative Adaptive Cruise Control on Traffic-Flow Characteristics. IEEE Trans. Intell. Transp. Syst. 2006, 7, 429–436. [Google Scholar] [CrossRef] [Green Version]
- Tientrakool, P.; Ho, Y.-C.; Maxemchuk, N.F. Highway Capacity Benefits from Using Vehicle-to-Vehicle Communication and Sensors for Collision Avoidance. In Proceedings of the 2011 IEEE Vehicular Technology Conference (VTC Fall), San Francisco, CA, USA, 5–8 September 2011; pp. 1–5. [Google Scholar]
- Shladover, S.E.; Su, D.; Lu, X.-Y. Impacts of Cooperative Adaptive Cruise Control on Freeway Traffic Flow. Transp. Res. Rec. J. Transp. Res. Board 2012, 2324, 63–70. [Google Scholar] [CrossRef] [Green Version]
- Bohm, F.; Häger, K. Introduction of Autonomous Vehicles in the Swedish Traffic System: Effects and Changes Due to the New Self-Driving Car Technology. 2015. Available online: https://www.diva-portal.org/smash/record.jsf?pid=diva2:816899 (accessed on 24 August 2021).
- Maurer, M.; Gerdes, J.C.; Lenz, B.; Winner, H. Autonomous Driving: Technical, Legal and Social Aspects; Springer: Berlin/Heidelberg, Germany, 2016; Available online: https://library.oapen.org/bitstream/handle/20.500.12657/27811/1002194.pdf?seque (accessed on 24 August 2021).
- Mena-Oreja, J.; Gozalvez, J.; Sepulcre, M. Effect of the Configuration of Platooning Maneuvers on the Traffic Flow under Mixed Traffic Scenarios. In Proceedings of the 2018 IEEE Vehicular Networking Conference (VNC), Taipei, Taiwan, 5–7 December 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Kesting, A.; Treiber, M.; Helbing, D. Enhanced intelligent driver model to access the impact of driving strategies on traffic capacity. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2010, 368, 4585–4605. [Google Scholar] [CrossRef] [Green Version]
- Jerath, K.; Brennan, S.N. Analytical Prediction of Self-Organized Traffic Jams as a Function of Increasing ACC Penetration. IEEE Trans. Intell. Transp. Syst. 2012, 13, 1782–1791. [Google Scholar] [CrossRef]
- Ntousakis, I.A.; Nikolos, I.K.; Papageorgiou, M. On Microscopic Modelling of Adaptive Cruise Control Systems. Transp. Res. Procedia 2015, 6, 111–127. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Li, Z.; Wang, H.; Wang, W.; Xing, L. Evaluating the safety impact of adaptive cruise control in traffic oscillations on freeways. Accid. Anal. Prev. 2017, 104, 137–145. [Google Scholar] [CrossRef] [PubMed]
- Kerner, B.S. Effect of Autonomous Driving on Traffic Breakdown in Mixed Traffic Flow: A Critical Mini-Review. arXiv 2020, arXiv:2004.06504. [Google Scholar]
- Vander Werf, J.; Shladover, S.; Miller, M.A. Conceptual Development and Performance Assessment for the Deployment Staging of Advanced Vehicle Control and Safety Systems. 2004. Available online: https://escholarship.org/uc/item/8hg3b55r (accessed on 24 August 2021).
- Schakel, W.J.; van Arem, B.; Netten, B.D. Effects of Cooperative Adaptive Cruise Control on traffic flow stability. In Proceedings of the 13th International IEEE Conference on Intelligent Transportation Systems, Funchal, Portugal, 19–22 September 2010; IEEE Society: Washington, DC, USA, 2010; pp. 759–764. [Google Scholar]
- Milanes, V.; Shladover, S.E.; Spring, J.; Nowakowski, C.; Kawazoe, H.; Nakamura, M. Cooperative Adaptive Cruise Control in Real Traffic Situations. IEEE Trans. Intell. Transp. Syst. 2013, 15, 296–305. [Google Scholar] [CrossRef] [Green Version]
- Arnaout, G.M.; Arnaout, J.-P. Exploring the effects of cooperative adaptive cruise control on highway traffic flow using microscopic traffic simulation. Transp. Plan. Technol. 2013, 37, 186–199. [Google Scholar] [CrossRef]
- Le Vine, S.; Zolfaghari, A.; Polak, J. Autonomous cars: The tension between occupant experience and intersection capacity. Transp. Res. Part C Emerg. Technol. 2015, 52, 1–14. [Google Scholar] [CrossRef]
- Ye, L.; Yamamoto, T.; Morikawa, T. Heterogeneous Traffic Flow Dynamics under Various Penetration Rates of Connected and Autonomous Vehicle. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 555–559. [Google Scholar]
- Makridis, M.; Mattas, K.; Ciuffo, B.; Raposo, M.A.; Toledo, T.; Thiel, C. Connected and Automated Vehicles on a Freeway Scenario. Effect on Traffic Congestion and Network Capacity. In Proceedings of 7th Transport Research Arena TRA 2018, Wien, Austria, 16–19 April 2018. [Google Scholar]
- Zhou, Y.; Zhu, H.; Guo, M.; Zhou, J. Impact of CACC vehicles’ cooperative driving strategy on mixed four-lane highway traffic flow. Phys. A Stat. Mech. Appl. 2020, 540, 122721. [Google Scholar] [CrossRef]
- Zhong, Z.; Lee, E.E.; Nejad, M.; Lee, J. Influence of CAV clustering strategies on mixed traffic flow characteristics: An analysis of vehicle trajectory data. Transp. Res. Part C Emerg. Technol. 2020, 115, 102611. [Google Scholar] [CrossRef] [Green Version]
- Jin, S.; Sun, D.-H.; Zhao, M.; Li, Y.; Chen, J. Modeling and stability analysis of mixed traffic with conventional and connected automated vehicles from cyber physical perspective. Phys. A Stat. Mech. Appl. 2020, 551, 124217. [Google Scholar] [CrossRef]
- Friedrich, B. The Effect of Autonomous Vehicles on Traffic. In Autonomous Driving; Gabler: Oslo, Norge, 2016; pp. 317–334. [Google Scholar]
- Wagner, P. Traffic Control and Traffic Management in a Transportation System with Autonomous Vehicles. In Autonomous Driving; Gabler: Oslo, Norge, 2016; pp. 301–316. [Google Scholar]
- Chen, D.; Ahn, S.; Chitturi, M.; Noyce, D.A. Towards vehicle automation: Roadway capacity formulation for traffic mixed with regular and automated vehicles. Transp. Res. Part B Methodol. 2017, 100, 196–221. [Google Scholar] [CrossRef] [Green Version]
- Elvarsson, A.B. Modelling Urban Driving and Stopping Behavior for Automated Vehicles. 2017. Available online: https://ethz.ch/content/dam/ethz/special-interest/baug/ivt/ivt-dam/publications/students/501-600/sa597.pdf (accessed on 24 August 2021).
- Stern, R.E.; Cui, S.; Monache, M.L.D.; Bhadani, R.; Bunting, M.; Churchill, M.; Hamilton, N.; Haulcy, R.; Pohlmann, H.; Wu, F.; et al. Dissipation of stop-and-go waves via control of autonomous vehicles: Field experiments. Transp. Res. Part C Emerg. Technol. 2018, 89, 205–221. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Y.; Wang, J.; Li, K. Smoothing Traffic Flow via Control of Autonomous Vehicles. IEEE Internet Things J. 2020, 7, 3882–3896. [Google Scholar] [CrossRef] [Green Version]
- Zong, S. How Connected Autonomous Vehicles Would Affect Our World?—A Literature Review on the Impacts of CAV on Road Capacity, Environment and Public Attitude. In Proceedings of the 7th International Conference on Traffic and Logistic Engineering, Paris, France, 21–23 August 2019; Volume 296, p. 01007. [Google Scholar]
- Nikolos, I.K.; Delis, A.I.; Papageorgiou, M. Macroscopic Modelling and Simulation of ACC and CACC Traffic. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems, Gran Canaria, Spain, 1–15 September 2015; pp. 2129–2134. [Google Scholar]
- Gora, P.; Katrakazas, C.; Drabicki, A.; Islam, F.; Ostaszewski, P. Microscopic traffic simulation models for connected and automated vehicles (CAVs)—State-of-the-art. Procedia Comput. Sci. 2020, 170, 474–481. [Google Scholar] [CrossRef]
- Soteropoulos, A.; Berger, M.; Ciari, F. Impacts of automated vehicles on travel behavior and land use: An international review of modelling studies. Transp. Rev. 2019, 39, 29–49. [Google Scholar] [CrossRef]
- Wang, J.; Peeta, S.; He, X. Multiclass traffic assignment model for mixed traffic flow of human-driven vehicles and connected and autonomous vehicles. Transp. Res. Part B Methodol. 2019, 126, 139–168. [Google Scholar] [CrossRef]
- Milakis, D. Long-term implications of automated vehicles: An introduction. Transp. Rev. 2019, 39, 1–8. [Google Scholar] [CrossRef]
- Howlett, M.; Ramesh, M.; Perl, A. Studying Public Policy: Policy Cycles and Policy Subsystems; Oxford University Press: Oxford, UK, 2009. [Google Scholar] [CrossRef]
- Taeihagh, A.; Lim, H.S.M. Governing autonomous vehicles: Emerging responses for safety, liability, privacy, cybersecurity, and industry risks. Transp. Rev. 2018, 39, 103–128. [Google Scholar] [CrossRef] [Green Version]
- Sala, M.; Soriguera, F. Macroscopic Modeling of Connected Autonomous Vehicle Platoons under Mixed Traffic Conditions. Transp. Res. Procedia 2020, 47, 163–170. [Google Scholar] [CrossRef]

{kind=link}
| Study | Study Variables | Main Findings | ||
|---|---|---|---|---|
| AV Type | Network Type | Study Type | ||
| [32] | ACC | Multi-lane highway | Simulation |
|
| [33] | ACC | Closed ring road | Meso-simulations |
|
| [34] | ACC | Single-lane and ring roads | Simulation |
|
| [8] | ACC | Highway | Macroscopic analysis |
|
| [22] | ACC | Multi-lane road | Simulation (considered lane changing) |
|
| [35] | ACC | Multi-lane highway | Micro-simulation |
|
| [36] | ACC | Highway | Review |
|
| Study | Study Variables | Main Findings | ||
|---|---|---|---|---|
| AV Type | Network Type | Study Type | ||
| [37] | CACC | Multi-lane highway | Simulation |
|
| [26] | CACC | Highway | Simulation |
|
| [38] | CACC | Single-lane highway | Simulation |
|
| [27] | CACC | Urban signalized intersection | Capacity analysis |
|
| [28] | CACC, ACC | Single-lane highway | Micro-simulation |
|
| [14] | CACC | Review |
| |
| [9] | CACC, ACC | Three-lane highway | Micro-simulation |
|
| [39] | CACC, ACC | Urban road | Field testing |
|
| [40] | CACC | Four-lane highway | Simulation |
|
| [41] | CAV | Signalized intersection | Micro-simulation |
|
| [34] | CACC, ACC | Highway | Numerical simulation |
|
| [8] | CAV, AV | Single-lane highway | Micro-simulation |
|
| [11] | CACC, ACC, AV | Urban signalized intersection | Simulation |
|
| [4] | CAV | Multi-lane highway | Simulation (considered lane changing) |
|
| [42] | CAV | Multi-lane highway | Simulation (considered lane changing) |
|
| [31] | CACC | Multi-lane road | Micro-simulation (considered platooning) |
|
| [43] | AV, ACC, CAV | Ring road | Simulation (considered lane-changing) |
|
| [20] | CAV | Single-lane circular road | Simulation |
|
| [24] | CAV | Urban network | Micro-simulation |
|
| [44] | ACC, CACC | Multi-lane highway | Numerical simulation (considered lane changing) |
|
| [1,44] | CAV | Highway | Simulation |
|
| [7] | CV, AV, CAV | Network level | Meso-simulation |
|
| [13] | CAV | Multi-lane highway | Simulation (considered lane changing) |
|
| [45] | CAV | Multi-lane highway | Micros simulation (considered lane changing) |
|
| [46] | CAV | A single-lane ring road | Numerical simulations |
|
| Study | Study Variables | Main Findings | ||
|---|---|---|---|---|
| AV Type | Network Type | Study Type | ||
| [23] | AV | Review |
| |
| [29] | Full AV (level 3) | Urban network | Simulation |
|
| [47] | AV | Highway and signalized intersection | Mathematical modeling |
|
| [48] | AV | Different network levels | Macro-simulation |
|
| [25] | AV | Multi-lane highway | Meso-simulation (considered lane-changing) |
|
| [49] | AV | Multi-lane highway | Theoretical framework |
|
| [50] | AV | Urban network | Simulation |
|
| [51] | AV | Single-lane circular road | Field experiment |
|
| [52] | AV | Single-lane ring road | Control-theoretic study |
|
| [19] | AV | Single-lane highway | Numerical experiment |
|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Al-Turki, M.; Ratrout, N.T.; Rahman, S.M.; Reza, I. Impacts of Autonomous Vehicles on Traffic Flow Characteristics under Mixed Traffic Environment: Future Perspectives. Sustainability 2021, 13, 11052. https://doi.org/10.3390/su131911052
Al-Turki M, Ratrout NT, Rahman SM, Reza I. Impacts of Autonomous Vehicles on Traffic Flow Characteristics under Mixed Traffic Environment: Future Perspectives. Sustainability. 2021; 13(19):11052. https://doi.org/10.3390/su131911052
Chicago/Turabian StyleAl-Turki, Mohammed, Nedal T. Ratrout, Syed Masiur Rahman, and Imran Reza. 2021. "Impacts of Autonomous Vehicles on Traffic Flow Characteristics under Mixed Traffic Environment: Future Perspectives" Sustainability 13, no. 19: 11052. https://doi.org/10.3390/su131911052
APA StyleAl-Turki, M., Ratrout, N. T., Rahman, S. M., & Reza, I. (2021). Impacts of Autonomous Vehicles on Traffic Flow Characteristics under Mixed Traffic Environment: Future Perspectives. Sustainability, 13(19), 11052. https://doi.org/10.3390/su131911052