
Optimization of Safety System Structures in Railway Transport


Abstract
:1. Introduction
- relationships between elements belonging to different categories of safety system components, for instance, the relationships between safety system elements and the elements of their environment;
- relationships between elements of the same categories, for instance, the relationships between safety system elements within a single safety function.
2. Problem Definition
2.1. Definition of a Safety System
- the purpose of the system is the rationalization of risk in the analysis areas, so as to ensure an acceptable or tolerable level of risk for the identified hazards;
- elements of this system can perform certain specific functions, so-called safety functions.
- eliminating hazard sources, this being the perfect situation, which can be mapped in optimization modes as the maximum efficacy of risk reduction measures;
- breaking the hazard source impact pathway, i.e., isolating the hazard source or isolating the receiver of exposures impacted by this source;
- detecting hazard source activity and informing about it.
2.2. Processing Risk-Related Data
- risk reduction measures are known;
- hazard sources which might occur in the area of analysis are known;
- the efficacy of risk reduction measures is known and expressed in the form of numerical measures;
- a risk reduction measure impacts a hazard source present within the area of analysis;
- the impact of a risk reduction measure takes on values from the set of binary numbers or values from any subset of real numbers, e.g., from the range (0; 1).
- the 0 value means no impact (zero degree of risk reduction related to the hazard source);
- the 1 value means full impact (elimination of the hazard source).
2.3. Risk Reduction Measure Efficacy
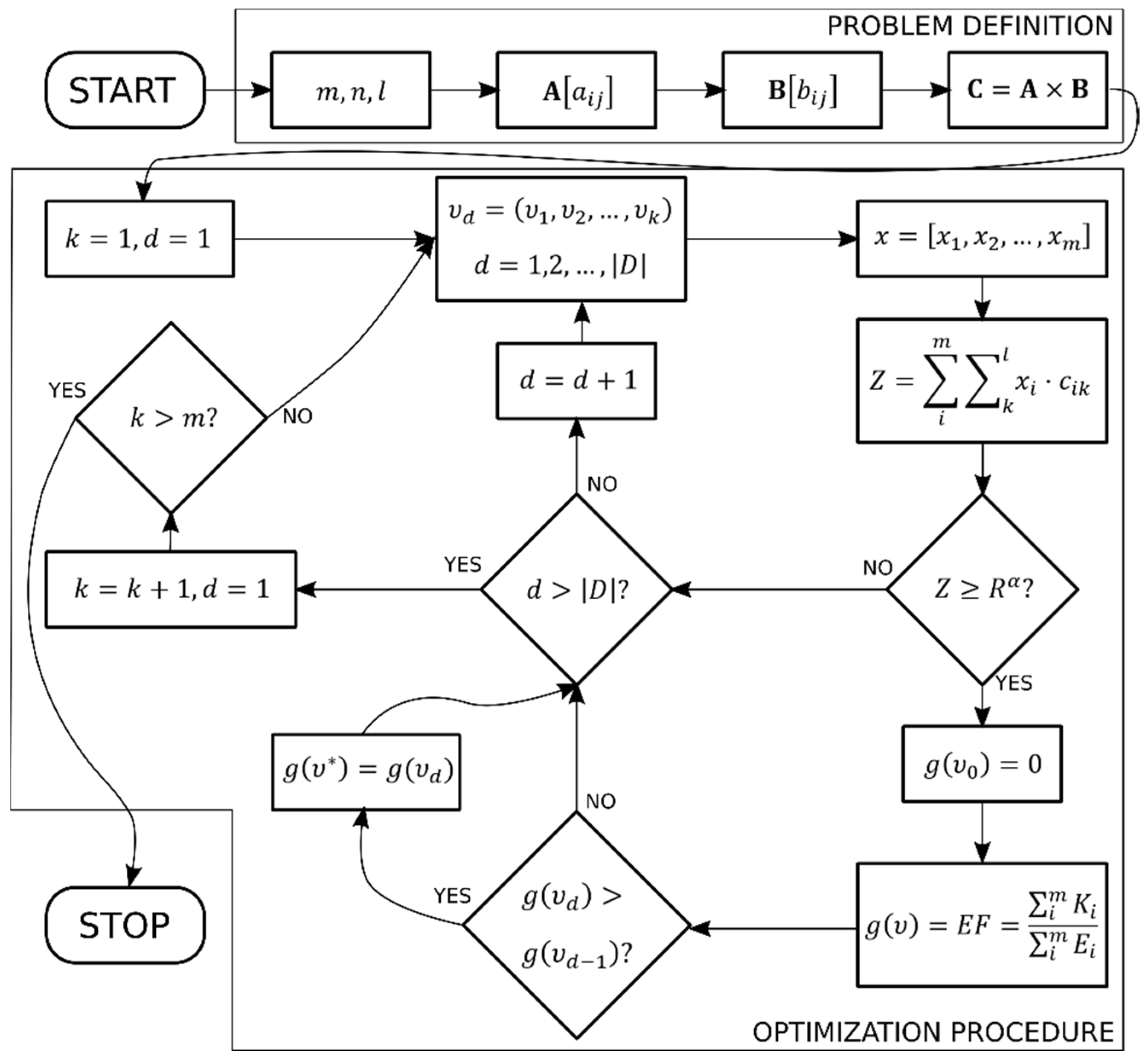
3. Safety System Optimization Procedure
4. Working Example
- hazard sources from outside of the applied system (out of the scope of responsibility of the designer of the safety system) or
- hazard sources which are derivatives of the sources discussed herein, which will thus be eliminated by one of the expected risk reduction measures.
- RRM2: Verification of the correctness and consistency of project requirements;
- RRM3: Software version control;
- RRM6: Service personnel training;
- RRM9: Activities involving communication of the risk (raising awareness related to technical safety and cybersecurity).
5. Discussion and Conclusions
- the efficacy of risk reduction measures is a non-linear time-dependent function;
- the use of one risk reduction measure excludes the use of another;
- elements/items of the choice set are predefined sets of risk reduction measures;
- a certain combination of measures affects the efficacy of the others.
- formulate a decision-making problem concerning the optimization of safety system structure, which is an original decision-making problem due to the specific manner of functioning of these systems;
- prepare a mathematical model for the optimization of safety system structure in the matrix form;
- develop an algorithm for searching for the optimal solution, which—if needed—makes it possible to take into account additional conditions of the decision-making situation causing nonlinearity of the model.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Perrow, C. Normal Accidents: Living with High-Risk Technologies; Princeton University Press: Princeton, NJ, USA, 1984. [Google Scholar]
- Le Coze, J.C. 1984–2014. Normal Accidents. Was Charles Perrow Right for the Wrong Reasons? J. Contin. Crisis Manag. 2015, 23, 275–286. [Google Scholar] [CrossRef]
- Liu, S.; Lin, Y. Grey System Theory and Application; Emerald Publishing: Bingley, UK, 2011; ISBN 978-1-61284-490-9. [Google Scholar]
- Cempel, C. Teoria szarych systemów—Nowa metodologia analizy i oceny złożonych systemów: Przegląd możliwości. Zesz. Nauk. Politech. Poznańskiej. Organ. Zarządzanie 2014, 63, 9–20. [Google Scholar]
- Głodek, W. Automatyka zabezpieczeniowa w przemyśle procesowym—Przegląd unormowań. Warsztaty SIPI61508 2003, 3, 1–10. [Google Scholar]
- International Electrotechnical Commission. IEC 61508 Functional Safety of Electrical/Electronic/Programmable Electronic Safety-Related Systems; International Electrotechnical Commission: Geneva, Switzerland, 2010. [Google Scholar]
- Summers, A.E. Introduction to layers of protection analysis. J. Hazard. Mater. 2003, 104, 163–168. [Google Scholar] [CrossRef]
- Vincoli, J.W. Basic Guide to System Safety; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2014; ISBN 9781118904589. [Google Scholar]
- Zhang, H.; Yuan, M.; Liang, Y.; Wang, B.; Zhang, W.; Zheng, J. A risk assessment based optimization method for route selection of hazardous liquid railway network. Saf. Sci. 2018, 110, 217–229. [Google Scholar] [CrossRef]
- Wang, L.; Qin, Y.; Xu, J.; Jia, L. A Fuzzy Optimization Model for High-Speed Railway Timetable Rescheduling. Discret. Dyn. Nat. Soc. 2012, 2012, 827073. [Google Scholar] [CrossRef]
- Dinmohammadi, F. A risk-based modelling approach to maintenance optimization of railway rolling stock. J. Qual. Maint. Eng. 2019, 25, 272–293. [Google Scholar] [CrossRef]
- Mousavi-Bideleh, S.M.; Berbyuk, V. Multiobjective optimisation of bogie suspension to boost speed on curves. Veh. Syst. Dyn. 2016, 54, 58–85. [Google Scholar] [CrossRef]
- Podofillini, L.; Zio, E.; Vatn, J. Risk-informed optimisation of railway tracks inspection and maintenance procedures. Reliab. Eng. Syst. Saf. 2006, 91, 20–35. [Google Scholar] [CrossRef]
- Vatn, J.; Aven, T. An approach to maintenance optimization where safety issues are important. Reliab. Eng. Syst. Saf. 2010, 95, 58–63. [Google Scholar] [CrossRef]
- Mahboob, Q.; Schöne, E.; Maschek, U.; Trinckauf, J. Investment into Human Risks in Railways and Decision Optimization. Hum. Ecol. Risk Assess. Int. J. 2015, 21, 1299–1313. [Google Scholar] [CrossRef]
- Gabbar, H.A.; Suzuki, K.; Shimada, Y. Design of plant safety model in plant enterprise engineering environment. Reliab. Eng. Syst. Saf. 2001, 73, 35–47. [Google Scholar] [CrossRef]
- European Standards. EN 50129 Railway Applications—Communication, Signalling and Processing Systems—Safety-Related Electronic Systems for Signalling; European Standards: Pilsen, Czech Republic, 2018. [Google Scholar]
- European Standards. EN 50126-2 Railway Applications. The Specification and Demonstration of Reliability, Availability, Maintainability and Safety (RAMS) Systems Approach to Safety; European Standards: Pilsen, Czech Republic, 2017. [Google Scholar]
- European Commission. Commission Implementing Regulation (EU) No 402/2013 of 30 April 2013 on the Common Safety Method for Risk Evaluation and Assessment and Repealing Regulation (EC) No 352/2009; European Commission: Brussels, Belgium, 2013. [Google Scholar]
- Gill, A.; Smoczyński, P. Layered model for convenient designing of safety system upgrades in railways. Saf. Sci. 2018, 110B, 168–176. [Google Scholar] [CrossRef]
- Gill, A. Layered Models of Safety Systems for Rail Transport Applications; Wydawnictwo Politechniki Poznańskiej: Poznań, Poland, 2018; ISBN 978-83-7775-517-4. [Google Scholar]
- Mahboob, Q.; Zio, E. Handbook of RAMS in Railway Systems: Theory and Practice; CRC Press: Boca Raton, FL, USA, 2018; ISBN 1351978799. [Google Scholar]
- Burkhalter, M.; Adey, B.T. Modelling the Complex Relationship between Interventions, Interventions Costs and the Service Provided When Evaluating Intervention Programs on Railway Infrastructure Networks. Infrastructures 2020, 5, 113. [Google Scholar] [CrossRef]
- Mehlhorn, K.; Sanders, P. Algorithms and Data Structures; Springer: Berlin/Heidelberg, Germany, 2008; ISBN 978-3-540-77977-3. [Google Scholar]
- Eiselt, H.A.; Sandblom, C.-L. Operations Research; Springer Texts in Business and Economics; Springer: Berlin/Heidelberg, Germany, 2012; ISBN 978-3-642-31053-9. [Google Scholar]
- Gill, A.; Smoczyński, P. Adaptation of the Rules of the Models of Games with Nature for the Design of Safety Systems BT—Information Technology in Disaster Risk Reduction; Murayama, Y., Velev, D., Zlateva, P., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 67–80. [Google Scholar]
- Hughes, B.P.; Anund, A.; Falkmer, T. System theory and safety models in Swedish, UK, Dutch and Australian road safety strategies. Accid. Anal. Prev. 2015, 74, 271–278. [Google Scholar] [CrossRef] [PubMed]
- Harms-Ringdahl, L. Analysis of safety functions and barriers in accidents. Saf. Sci. 2009, 47, 353–363. [Google Scholar] [CrossRef] [Green Version]
- Harms-Ringdahl, L. Guide to Safety Analysis for Accident Prevention; IRS Riskhantering AB: Stockholm, Sweden, 2013; ISBN 9789163731648. [Google Scholar]
- Harms-Ringdahl, L. Investigation of barriers and safety functions related to accidents. In Safety and Reliability, Proceedings of the ESREL 2003 Conference, Maastricht, The Netherlands, 15–18 June 2003; Routledge: London, UK, 2003; pp. 1–8. [Google Scholar]
- Kadziński, A. Study on Selected Dependability Aspects of Systems and Rail Vehicles Objects; Wydawnictwo Politechniki Poznańskiej: Poznań, Poland, 2013; ISBN 9788377752890. [Google Scholar]
- Bianchini, A.; Donini, F.; Pellegrini, M.; Saccani, C. An innovative methodology for measuring the effective implementation of an Occupational Health and Safety Management System in the European Union. Saf. Sci. 2017, 92, 26–33. [Google Scholar] [CrossRef]
- International Electrotechnical Commission. EN IEC 60812 Failure Modes and Effects Analysis (FMEA and FMECA); International Electrotechnical Commission: Geneva, Switzerland, 2010. [Google Scholar]
- Studenski, R. Organization of Safe Work in the Enterprise; Wydawnictwo Politechniki Śląskiej: Gliwice, Poland, 1996. [Google Scholar]
- Mak, V.; Rapoport, A.; Seale, D.A. Sequential search by groups with rank-dependent payoffs: An experimental study. Organ. Behav. Hum. Decis. Process. 2014, 124, 256–267. [Google Scholar] [CrossRef]
- Li, L.; Khan, F.; Pesavento, M.; Ratnarajah, T.; Prakriya, S. Sequential search based power allocation and beamforming design in overlay cognitive radio networks. Signal Process. 2014, 97, 221–231. [Google Scholar] [CrossRef]
- Bearden, J.N.; Connolly, T. Multi-attribute sequential search. Organ. Behav. Hum. Decis. Process. 2007, 103, 147–158. [Google Scholar] [CrossRef]
- Heydari, J.; Tajer, A.; Poor, H.V. Quickest Linear Search over Correlated Sequences. IEEE Trans. Inf. Theory 2016, 62, 5786–5808. [Google Scholar] [CrossRef]
- Mauring, E. A two-agent model of sequential search and choice. J. Econ. Behav. Organ. 2016, 123, 122–137. [Google Scholar] [CrossRef] [Green Version]
- Limoncelli, T.A. 10 optimizations on linear search. Commun. ACM 2016, 59, 44–48. [Google Scholar] [CrossRef]

{kind=link}
| RRM ID | Risk Reduction Measures |
|---|---|
| RRM1 | Audit of tasks as safety planning and quality assurance activities |
| RRM2 | Verification of the correctness and consistency of project requirements |
| RRM3 | Software version control |
| RRM4 | Operator/maintainer-friendly design features |
| RRM5 | Post-assembly and final tests with appropriate reports |
| RRM6 | Service personnel training |
| RRM7 | Supervision of the performance of installation work |
| RRM8 | Audits/periodic device inspections |
| RRM9 | Activities involving communication of the risk (raising awareness related to technical safety and cybersecurity) |
| RRM10 | Computer-aided specification tools |
| RRM11 | Program sequence monitoring |
| RRM12 | Failure and hazard analysis using RBD, cause–consequence diagrams or ETA methods |
| HS | Systematic Failure Categories (Hazard Sources) |
|---|---|
| HS1 | Errors in the requirements, including inherent weaknesses |
| HS2 | Design and realization inadequacies in all phases of product life cycle |
| HS3 | Software errors |
| HS4 | Operating instruction deficiencies |
| HS5 | Human errors |
| H | Hazard |
|---|---|
| H1 | The possibility of the train driving along an unguarded category A level crossing |
| H2 | The possibility of two trains driving along one track in opposite directions |
| H3 | The possibility of two trains driving along one track in the same direction |
| H4 | The possibility of the train driving with excessive speed across an area with a speed limit |
| Realization Number | RRM Numbers | Value of Risk Reduction by the System * | Cost (% of Project Budgets) | Sum of Risk Reduction Indicators (Ei) | Efficacy Function (EF) Values |
|---|---|---|---|---|---|
| 8 | 1, 2, 10 | 4.952 | 23% | 2.30111524 | 0.0999515 |
| 62 | 2, 3, 10 | 5.402 | 14% | 2.51022305 | 0.0557719 |
| 70 | 2, 4, 10 | 5.4 | 24% | 2.50929368 | 0.0956444 |
| 77 | 2, 5, 10 | 4.874 | 27% | 2.26468402 | 0.1192219 |
| 83 | 2, 6, 10 | 5.4 | 17% | 2.50929368 | 0.0677481 |
| 92 | 2, 8, 10 | 5.55 | 18% | 2.57899628 | 0.0697946 |
| 95 | 2, 9, 10 | 4.58 | 16% | 2.12825279 | 0.0751790 |
| 99 | 2, 10, 12 | 5.152 | 31% | 2.39405205 | 0.1294876 |
| Designation of the m choose k combination | Numbers of Risk Reduction Measures | Number of Combinations | Number of Acceptable Solutions | Total Value of Risk Reduction | Efficacy Function (EF) Values |
|---|---|---|---|---|---|
| 12 choose 2 | -- | 66 | 0 | -- | -- |
| 12 choose 3 | 2, 3, 10 | 220 | 8 | 5.402 | 0.0557719 |
| 12 choose 4 | 2, 3, 6, 9 | 495 | 143 | 4.932 | 0.0436334 |
| 12 choose 5 | 1, 2, 3, 6, 8 | 792 | 505 | 6.704 | 0.0706205 |
| 12 choose 6 | 1, 2, 3, 6, 8, 9 | 924 | 808 | 7.134 | 0.0754135 |
| 12 choose 7 | 1, 2, 3, 6, 8, 9, 10 | 792 | 772 | 9.284 | 0.0834468 |
| 12 choose 8 | 1, 2, 3, 4, 6, 8, 9, 10 | 495 | 495 | 10.534 | 0.0960167 |
| 12 choose 9 | 1, 2, 3, 4, 6, 7, 8, 9, 10 | 220 | 220 | 10.934 | 0.1102177 |
| 12 choose 10 | 1, 2, 3, 4, 6, 7.8, 9, 10, 11 | 66 | 66 | 11.388 | 0.1285047 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gill, A.; Smoczyński, P. Optimization of Safety System Structures in Railway Transport. Sustainability 2021, 13, 10700. https://doi.org/10.3390/su131910700
Gill A, Smoczyński P. Optimization of Safety System Structures in Railway Transport. Sustainability. 2021; 13(19):10700. https://doi.org/10.3390/su131910700
Chicago/Turabian StyleGill, Adrian, and Piotr Smoczyński. 2021. "Optimization of Safety System Structures in Railway Transport" Sustainability 13, no. 19: 10700. https://doi.org/10.3390/su131910700
APA StyleGill, A., & Smoczyński, P. (2021). Optimization of Safety System Structures in Railway Transport. Sustainability, 13(19), 10700. https://doi.org/10.3390/su131910700