1. Introduction
Calculating the total number of boats in the world is an inexact science, but it is stated by some reports in 2017 that there are estimated to be more than 30 million recreational boats on the planet, not including cruise ships [
1]. The Electric Boat and Ship Market was valued at USD 5 billion in 2020 and expected to reach USD 10 billion by 2026 registering a compound annual growth rate (CAGR) of above 11% during the forecast period (2021–2026). It is recorded that the CO
2 emissions from boats form about 3–5% of the world’s CO
2 emissions, which equates to about one billion tons [
2].
The necessity of reducing pollutant emissions together with environmental issues requires special actions from boat manufacturers and researchers to propose alternative clean energy such as fuel cells (FCs) [
3]. Thanks to the success of hydrogen fuel cells in heavy-duty vehicles, FCs (nowadays) are being integrated into different marine vessels. Fuel cells are playing the main role in reducing the greenhouse gas (GHG) emissions of marine industries on the ports and water. For marine vessels, fuel cells are the only viable, true zero-emission option. Just like batteries, fuel cells produce electricity with high efficiency through an electro-chemical process. The difference is, with a fuel cell, energy is stored separately in the form of hydrogen fuel. As long as fuel is available, the fuel cell power systems will produce electricity as a generator. The only emissions from a fuel cell are water vapor and heat.
Nearly more than 10 years ago, there was plenty of effort on hydrogen FCs to be the carbon-free future for transportation applications, such as recreational boating. Both hydrogen FCs and batteries can produce clean energy without any CO
2 emissions. Although batteries are less costly than
FC, hydrogen cells do not need to recharge or run down as long as there is a stable source of hydrogen [
4]. However, due to the slowness of
FC at starting and operation, the utilization of batteries as auxiliary sources with
FC is, in fact, crucial to guarantee a smooth driving speed of the electric boats. In addition, the hybrid plane can integrate storage devices, such as a pack of batteries, to allow a significant reduction in hydrogen consumed by
FC [
5]. Batteries are a zero-emission power solution for smaller vessels that operate with short duty cycles. However, the lower power density and greater weight limit the use of batteries in many applications.
The hybrid energy system of
FC and ESS is widely used in transportation applications such as Hybrid Electrical Vehicles (HEV) [
6]. Most of the studies in [
7,
8,
9,
10] has been simulated under a different type of platform such as Simulink, SimPowerSystem, HOMER, etc. In the HEV application,
FC, lithium-ion battery and ultracapacitors system was used to power the electric vehicle based on a fuzzy logic system [
7]. The control of voltage and current through the DC/DC converters is based on the frequency energy management and sliding mode control.
Another nonlinear control system has been simulated to manage the power through the boost and boost-buck converters [
8]. This control system has been designed to adapt the nonlinear characteristics of power electronic elements and the time-variant system. The closed loop control system has been designed to meet the requirements of system stability based on the sources (
FC and SC). Various ESS has been combined with
FC to ensure energy supply in the HEV, based on different topologies that respect the design of advanced charge systems [
9]. A Simulink simulation has been used to carry out a mathematical model for hybrid systems consisting of
FC/battery source for boat applications. The batteries are directly connected to the DC microgrid without any control, while the
FC is controlled through DC/DC converters based on operation state scenarios [
10]. However, most of these studies [
5,
6,
7,
8,
9,
10] have been modeled based on many assumptions and approximations to represent the physical operation of the system and still need to actualize.
Some other researchers have been invested in the hardware in the loop and experiments to test the control strategies applied to HEV. The supercapacitor (SC) bank has been used at a transient state of operation, in addition to the
FC [
11]. The Lyapunov nonlinear control method has been applied to the simulation system based on HEV to estimate the converter control parameters. The New European Driving Cycle (NEDC) has been used to evaluate the proposed energy management method through simulation tests compared to the experimental one [
12]. The DC network has linked between multi-source
FC, lithium batteries and ultracapacitors through DC/DC converters and an asynchronous machine through a DC/AC inverter. In [
13], the authors proposed a closed loop control system to manage the distributed power between the multi-source system and load that represent the Hybrid Electric Boat (HEB). The main goal of the control system is to share the load profile between sets of two variable speed diesel generators and an auxiliary source (ESS) that is connected through the bidirectional DC/DC converter.
In 2019, the CO
2 emissions are increasing to reach 1.5 billion tons because of the significant growth in demand on all fossil fuels. To avoid these emissions, many countries, such as China, Europe and the United States, are using renewable energies in the power sector. In this context, the multi-source system consisting of wind and PV with battery has been experimentally tested to minimize the generation of a diesel system [
14]. The MPPT has been used to control the PV and wind while the main goal of the battery was the compensation of intermittent power fluctuations in the system. In [
15], the authors proposed a hybrid system to respect the environmental concerns and respond to the energy demand. A DC/DC converter is used to integrate PV to the DC grid in case of failure in the production of wind energy delivered through a three-phase bidirectional AC/DC converter. A survey of challenges that faced the integration of renewable energy sources has been presented in [
16].
Compared to other types of stored energy, both FC and ESS technologies have low environmental effects. The system based on FC has better ability to work for more operating time than batteries. On the other hand, batteries require fewer spare components and have a low price. The results of real-time monitoring on transport applications such as boats can gain a wide view of the challenges and advantages of using FC and ESS energy technologies. For this reason, FC energy and lithium-ion battery storage systems will be searched in this paper.
A hybrid electric system consisting of FC and a pack of batteries has been proposed in this paper. An efficient control strategy to manage the flow of energy between the two sources and boat power demand (load) has been presented. The system has been constructed based on the continuity of hydrogen into the fuel cell, which is considered to be the main source to provide the majority of the load whereas the Electrical Storage System (ESS) supplies the complement of the request power during the peak load and FC start up. The proposed control strategy has adopted the combination between the frequency approach and RST control system. The frequency approach has been modified to control the time constant in real-time implementation based on the health state of ESS. The main goals of this real-time control strategy are to maintain the reliability of the hybrid system and to secure the two sources from unsecured operation conditions, in addition to minimizing the hydrogen consumption.
The organization of this paper includes the configuration of the proposed hybrid system in
Section 2. In
Section 3, the control strategies of
FC and pack of a battery system based on DC/DC converters have been detailed.
Section 4 is devoted to the energy management system based on frequency approach to share the load power by controlling the DC bus voltage and the bidirectional current of the battery system.
Section 5 gives a presentation of the experimental results on a reduced scale system, and finally, the conclusion remarks are described in the
Section 6.
2. Structure of Hybrid Electric Boat System
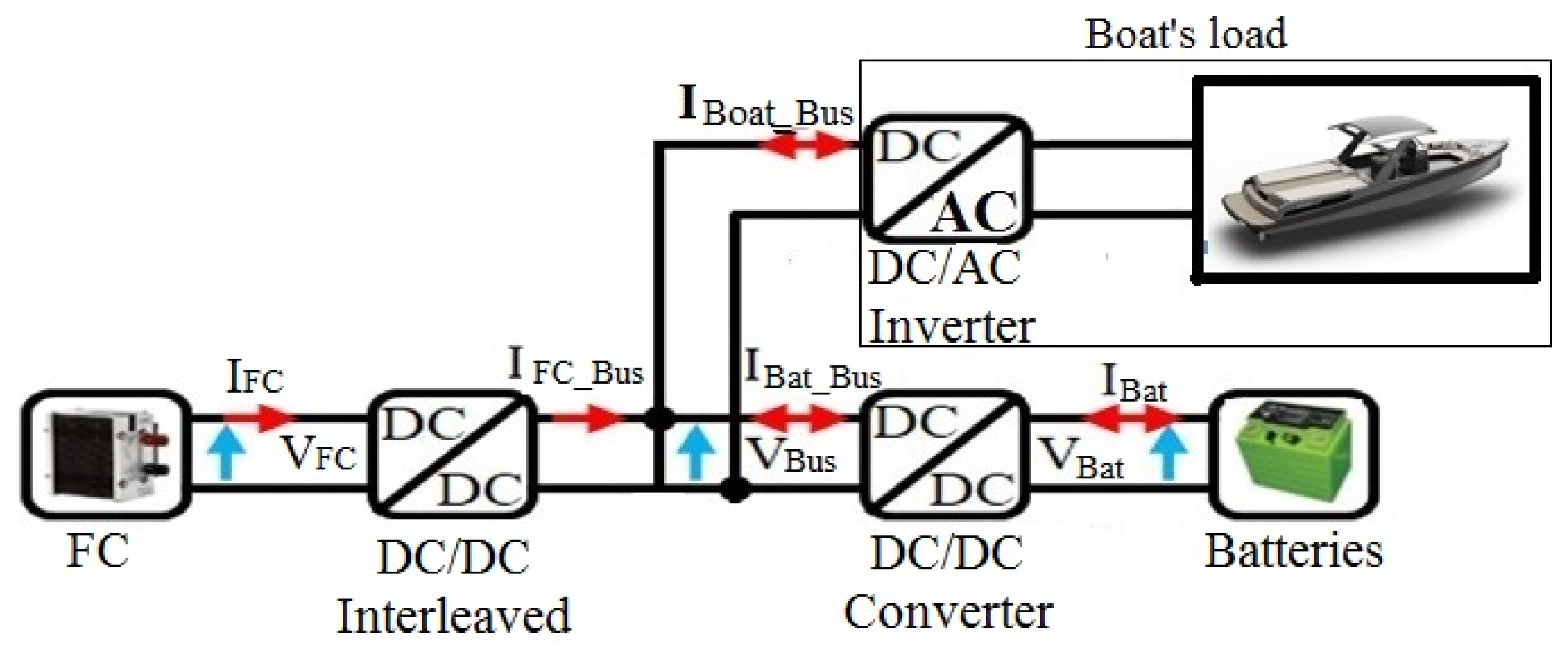
The studied HEB system presented in
Figure 1 consists of two types of resources (
FC combined with the lithium batteries) and the load represented by electric boat power demand. The DC grid is connected to the
FC through an interleaved boost converter and a pack of batteries (power source) through a buck-boost DC/DC converter. The variable load has been linked to the DC/AC inverter as shown in the HEB system configuration.
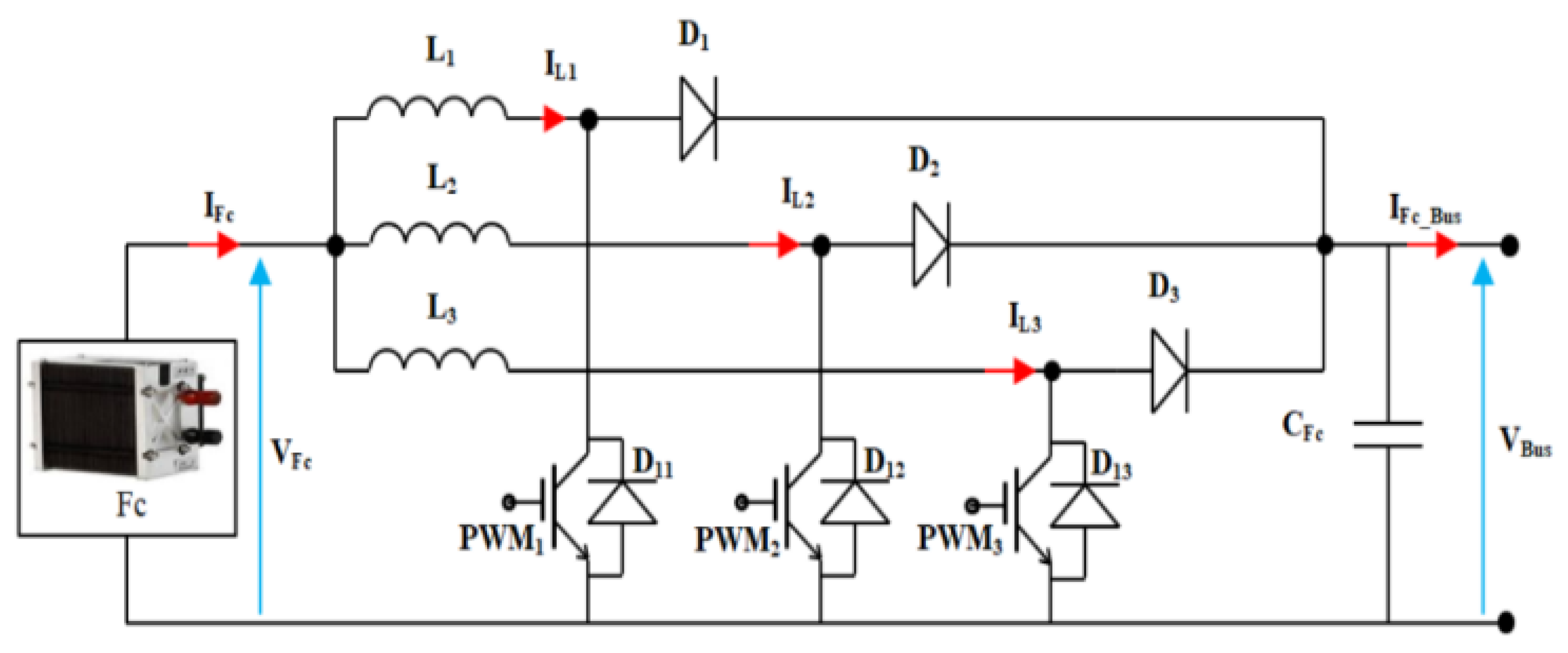
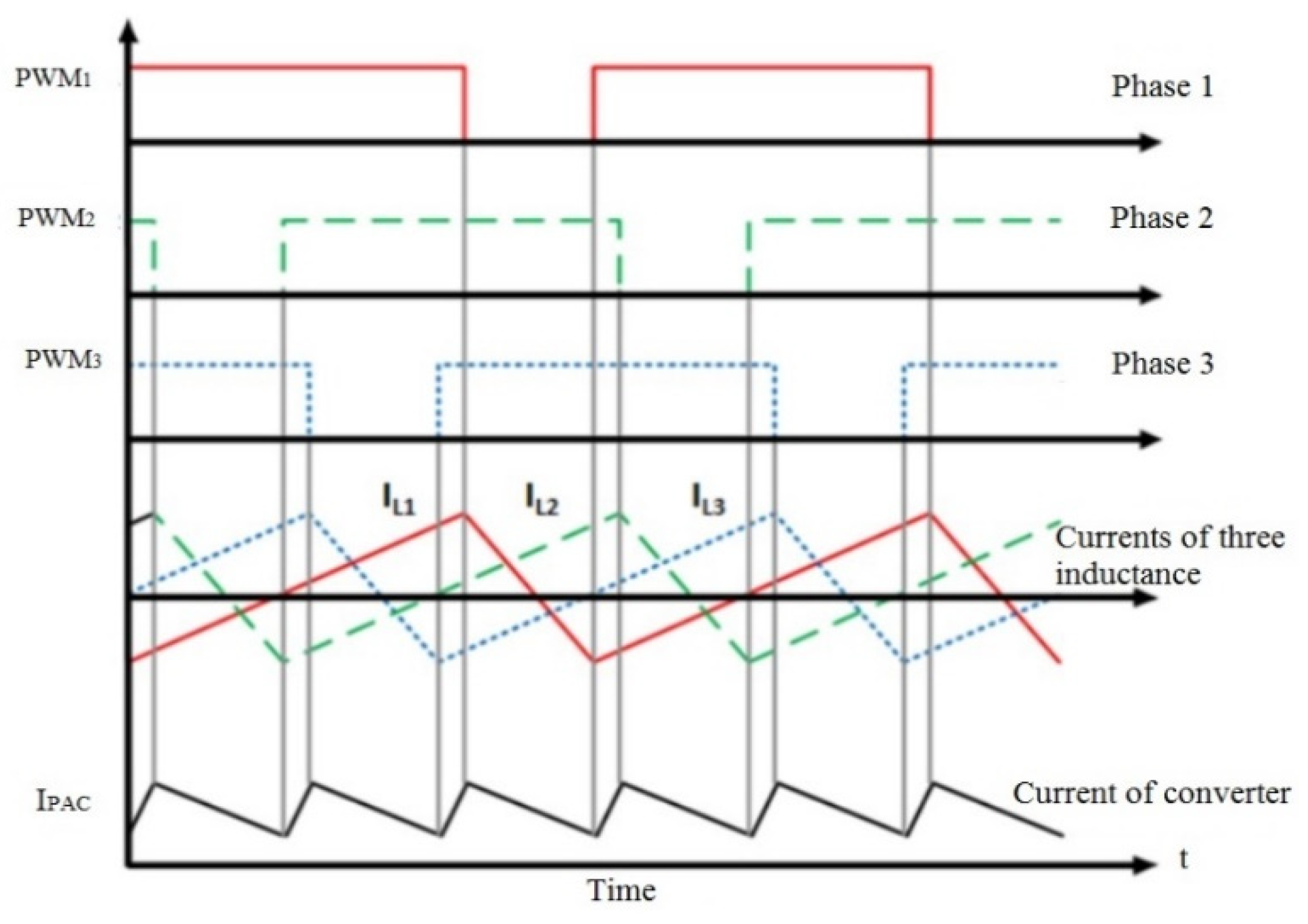
In this paper, a pack of battery storage energy is utilized to overcome the disadvantages of the slow operation of the FC (especially at startup). The main contribution of the FC source is to control and maintain the continuity of DC bus voltage with or without output current of ESS. In addition, the DC energy supplied from the FC of the proposed system is based on interleave boost converters because of their advantages such as higher efficiency, reduced ripple currents, and substantially reducing losses.
The batteries can contribute to providing appropriate and smooth DC power generation for boat and reduce the amount of energy required from the FC source. The DC/DC and DC/AC converters are used for current control to improve the quality of energy transfer, to reduce the hydrogen consumption by the FC, using ESS in real-time conditions. Batteries ESS capacity was determined to be able to store the energy from FC source at charging time and return it at discharge time to meet the fast shortages in demand.
The load profile of HEB is proposed to represent boat freight transport with rated 60 kW from Le Havre to Paris in France.
4. Frequency Approach for Control Strategy
The control of power is unidirectional for the fuel cell and load, while for the pack of the batteries is bidirectional. The distribution of power into the DC grid is controlled by using the frequency approach, which considers the power balance, state of charge (SoC) for batteries, and the limited power of FC and batteries. All these constraints can be described by the following equations:
Pack of batteries power limits:
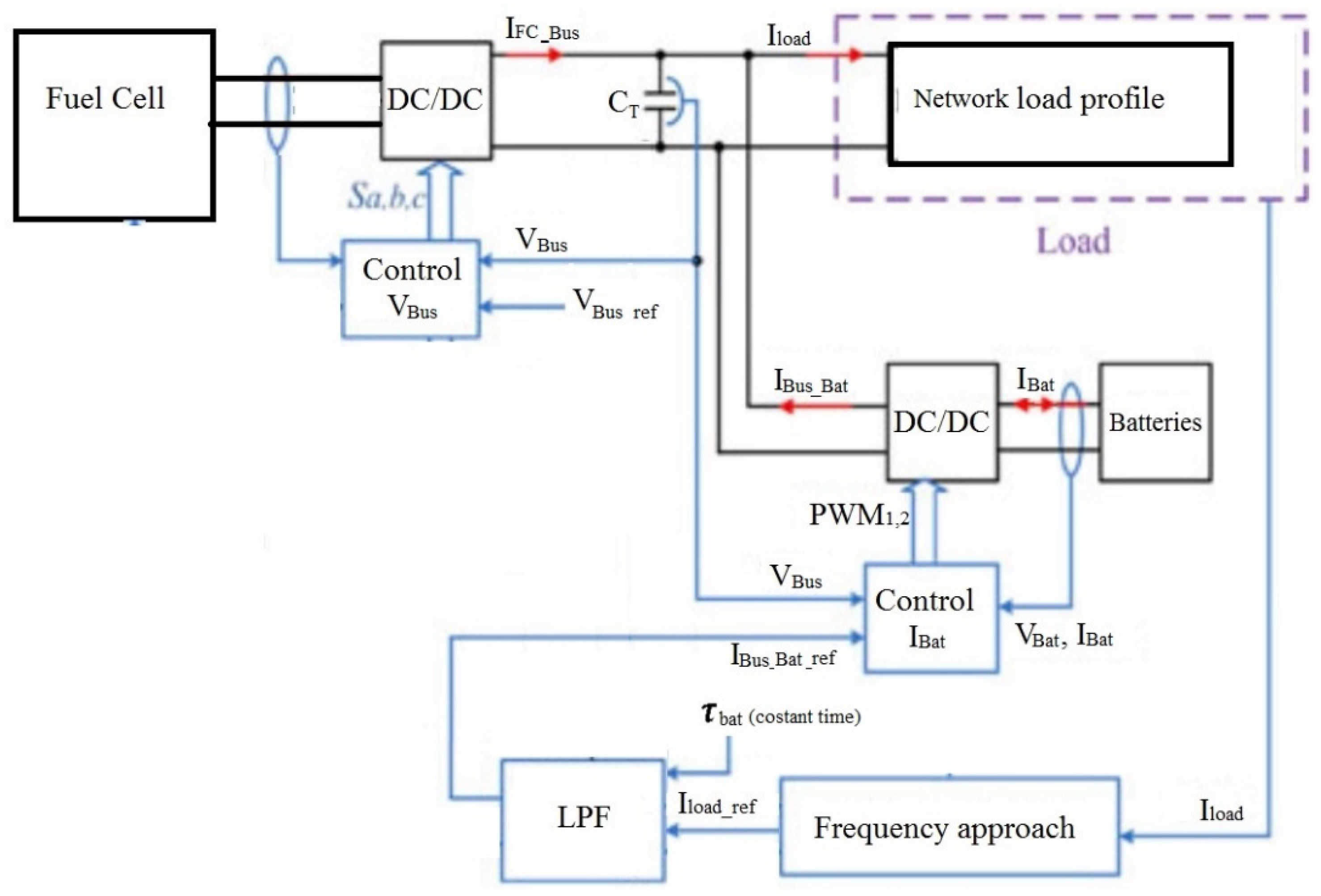
This control strategy is based on three main control systems to determine the switch state of the converters and on-times as shown in
Figure 8. It has been proposed to control these dynamic interactions by taking into account the frequency content of the fluctuations. If the DC bus voltage is controlled to a constant value, the disturbances will be transferred to the currents.
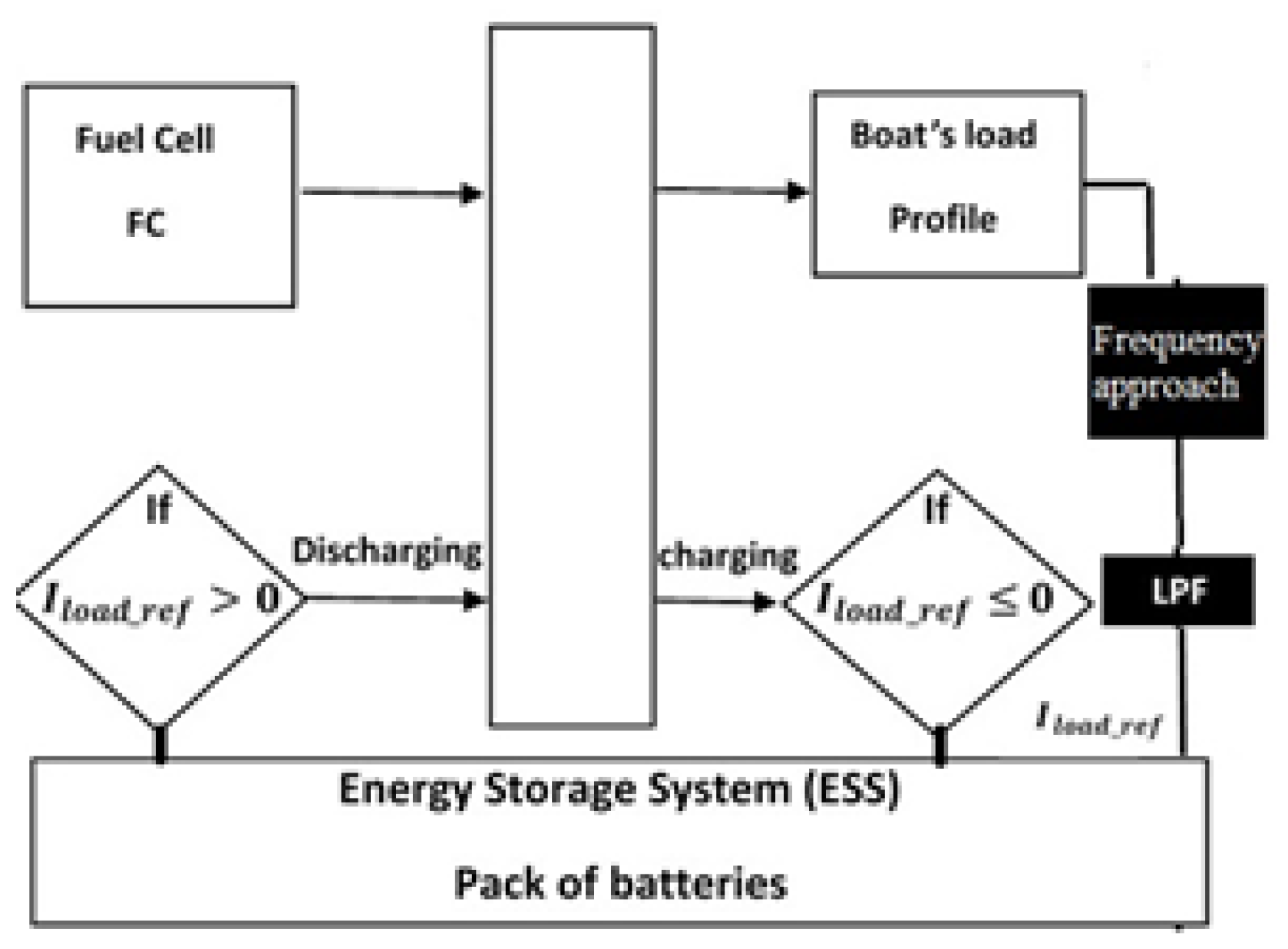
The current reference of batteries is extracted from the load demand using the low-pass filter (LPF) based on DC bus voltage controller as shown in
Figure 9. Due to profile variances for boats’ demand in terms of start and operation status, the batteries current reference (
) will use to control the state (buck/boost) of DC/DC converter at the side of the pack of batteries. The current control system is based on the changes of converter operation mode. The converter mode is operated as the follow principle: If sign
, the converter operates in boost mode and pack of battery supply energy to DC-bus. Otherwise, the converter operates in buck mode and batteries store energy.
The approach of low-pass filter (LPF) has been determined by identifying the functions as described in
Figure 10. This method has been developed to control the time constants of the filter during the real-time operations, according to the healthy state of batteries such as
SoC, capacitance and resistance. The currents of load are broken down into low frequency components to estimate the reference of battery power and high frequency ones, where the component of the high frequency is utilized to estimate the
FC current.
The parameters of the functions that define the control of LPF time constant can be expressed as follows:
5. Simulation Results for Frequency Approach
To demonstrate the feasibility of the HEB, the simulations of the energy management strategy are done using Matlab/Simulink software. The rated power for the simulated system is considered as 60 kW, and all other parameters for the rest of the system are detailed in
Table 1. These parameters are obtained from the data sheet of the battery [
24], from previous work [
25] and the setting for the control system.
The adopted energy management splits the load energy demand into several components according to the number and nature of the onboard energy sources. In this HEB case, the system contains two energy sources: fuel cells and a pack of batteries. The fuel cells stack has lower dynamic performance compared to the battery pack. Therefore, the Fc contribution will cover the low frequency component extracted from the load current demand, furthermore the Fc stack is considered to be the system’s main source, and the DC-bus voltage is controlled through it.
On the other hand, the high frequency component is ensured by the battery pack because it benefits from higher dynamic characteristics than the Fc, and it is considered to be an auxiliary energy source. The load current separation is performed using a low pass filter.
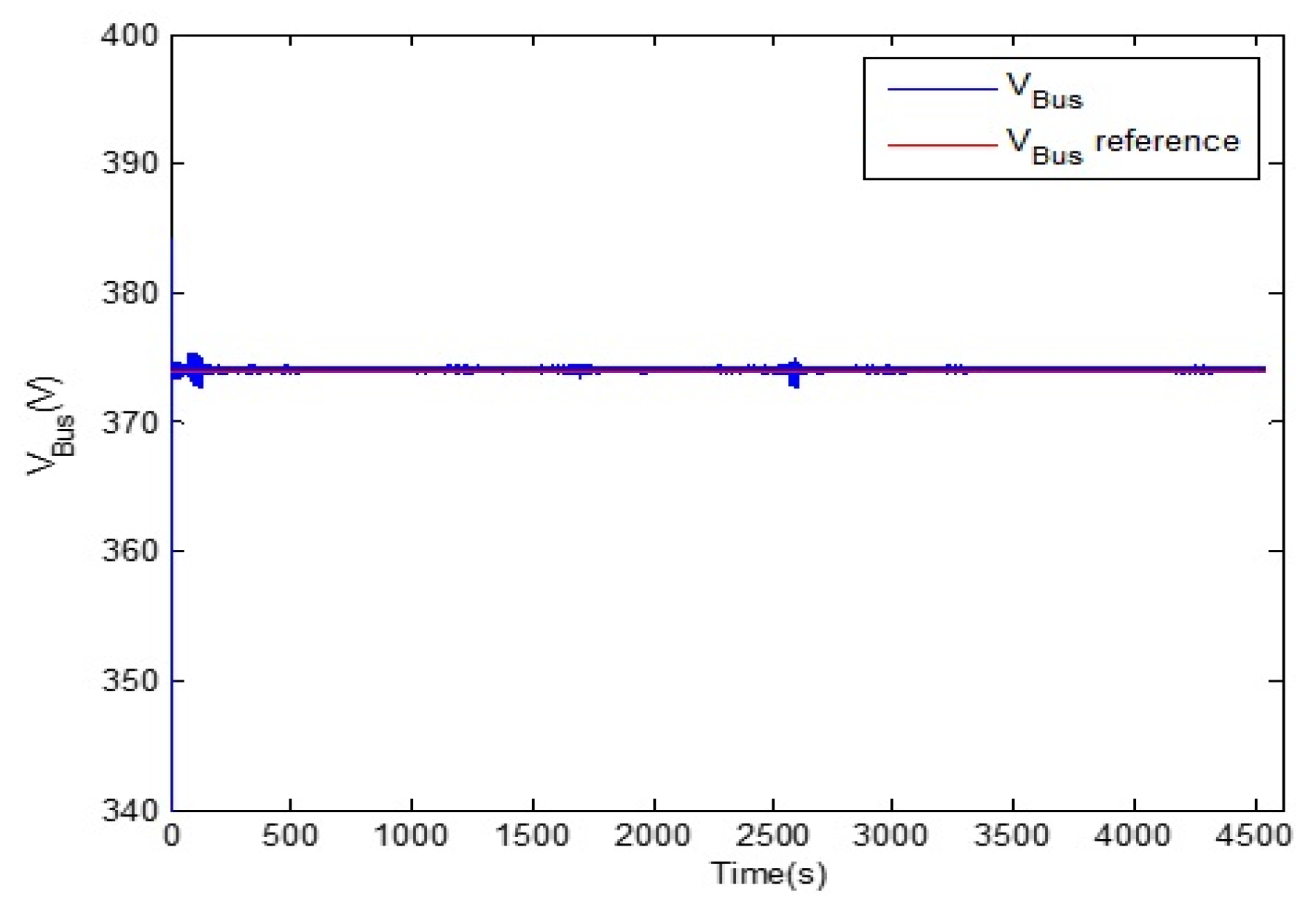
In this simulation, the DC-bus voltage is set to a constant point as shown in
Figure 11, so that the current flows through the bus link to share the load demand with the multi-source system (fuel cells stack and battery pack) according to the proposed modified frequency separation approach. The implemented voltage control strategy maintains the DC-bus voltage around the constant reference value. For this simulation, the
VBus reference value is fixed to 374 V. According to the simulation result, the voltage control is satisfied since the measure is very close to the set point with minor fluctuations due to the load current variations.
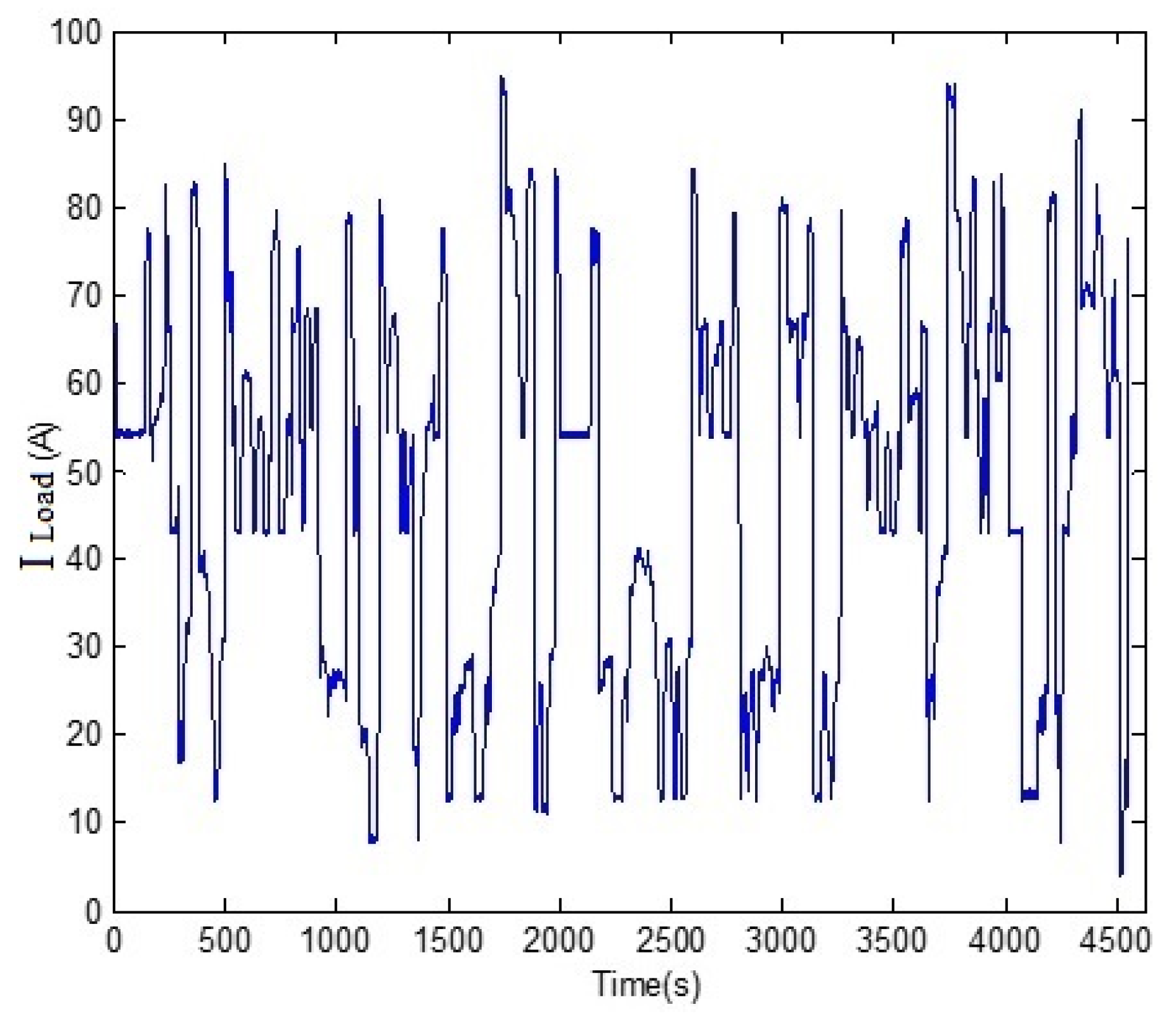
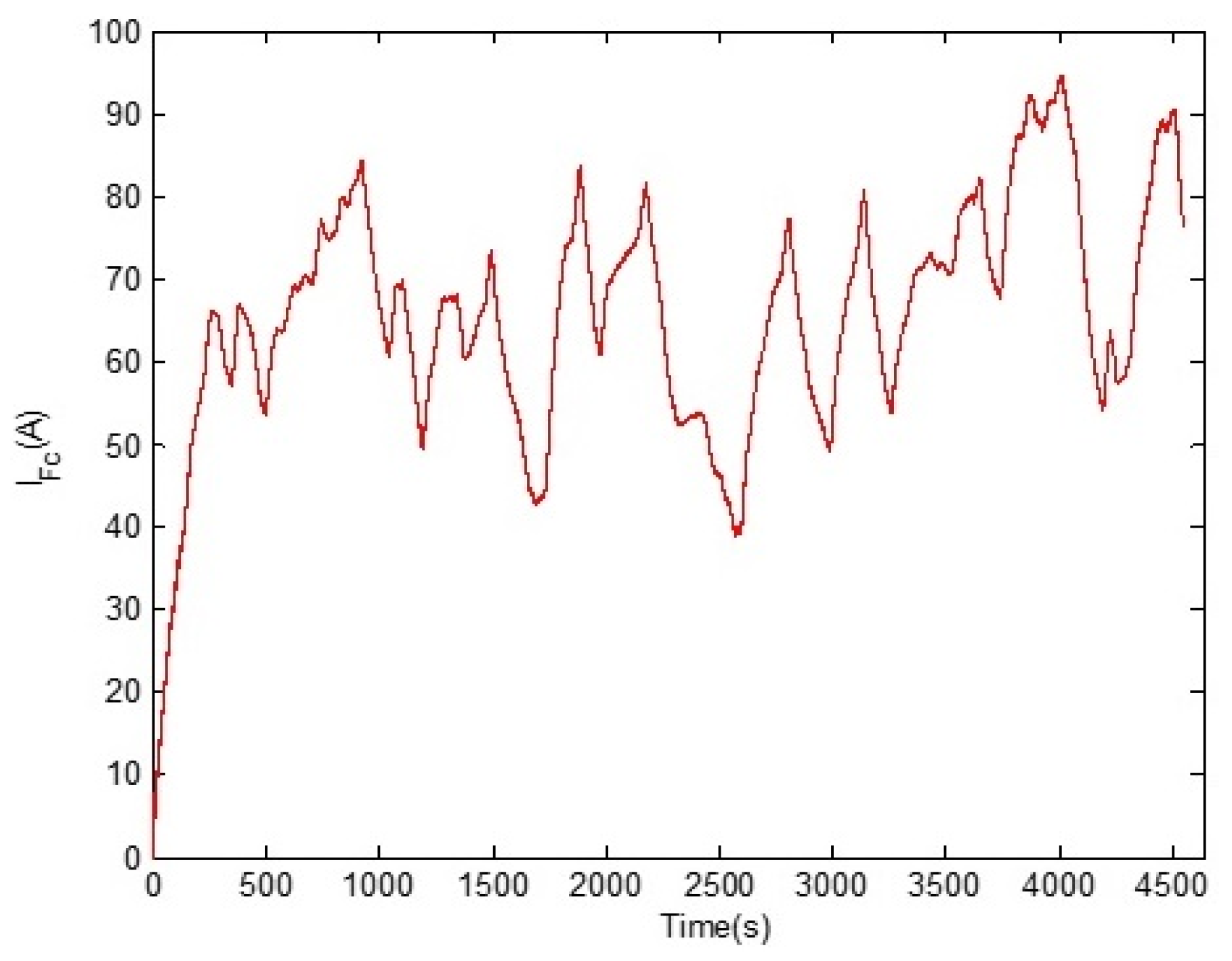
Figure 12 shows the profile of HEB for the total duration (4572.5 s) with a high peak of 95 A and minimum current of 2 A.
Figure 13 shows the
Fc stack current contribution, which represents the low frequency component of the load power requirement. Compared to the batteries and the load ones,
IFc frequency variation is moderate. The
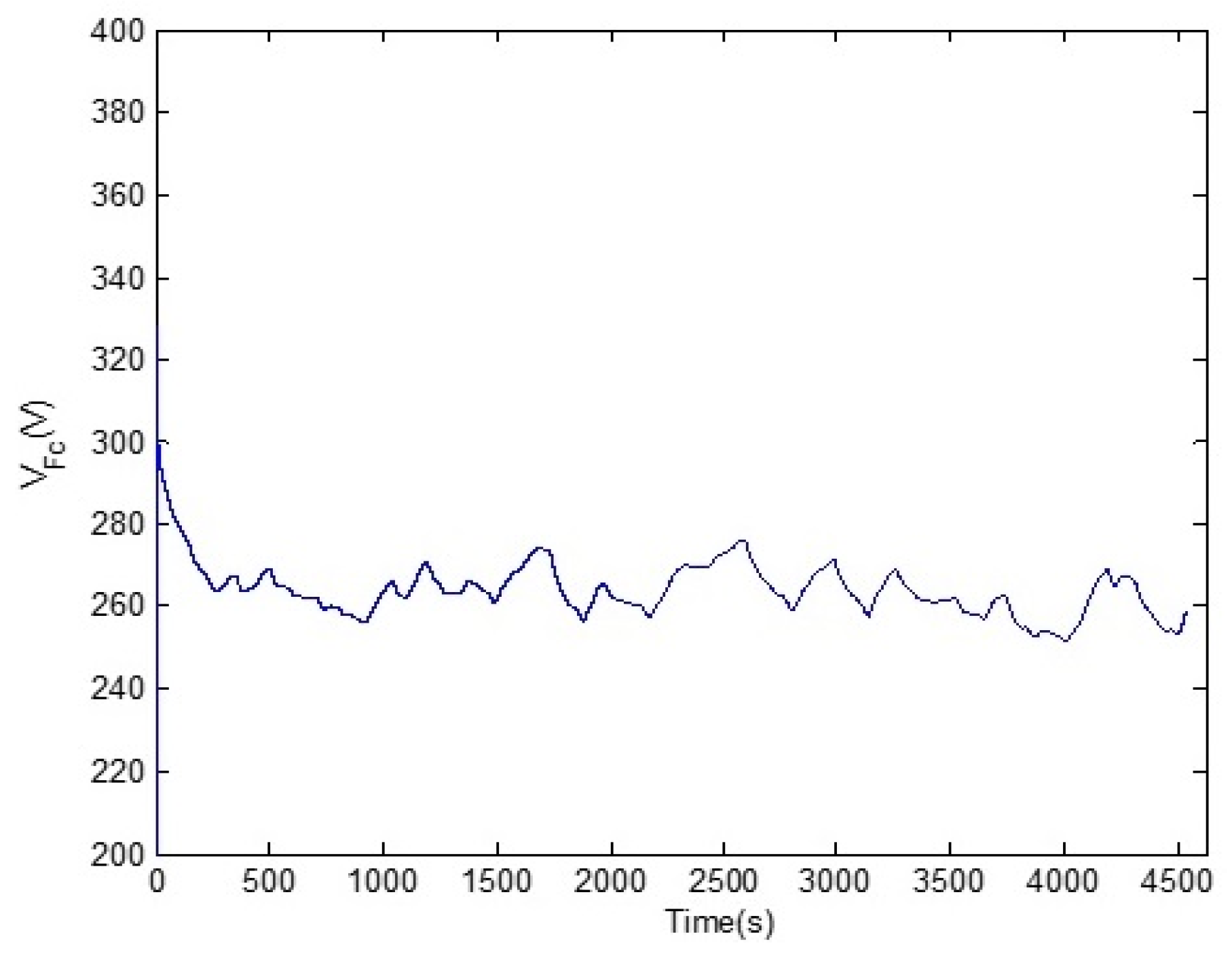
Fc stack terminal voltage is illustrated in
Figure 14. Regarding the voltage response, and beside the first voltage drop due to
Fc voltage activation,
does not fluctuate significantly compared to
; this means that the
FC stack is not requested during transient load states.
The battery pack current and voltage are presented, respectively, in
Figure 15 and
Figure 16. The battery pack ensures the high frequency of the load power requirement. It can be noted from the above figures that when there is a considerable load demand, it will cause a fast-discharging current from the battery. On the other hand, during large load power drops, the battery voltage increases due to the recovered current. Finally, when the load demand is stable with no high frequency solicitations, the battery voltage is stable.
6. Experimental Verification of the Control Strategies
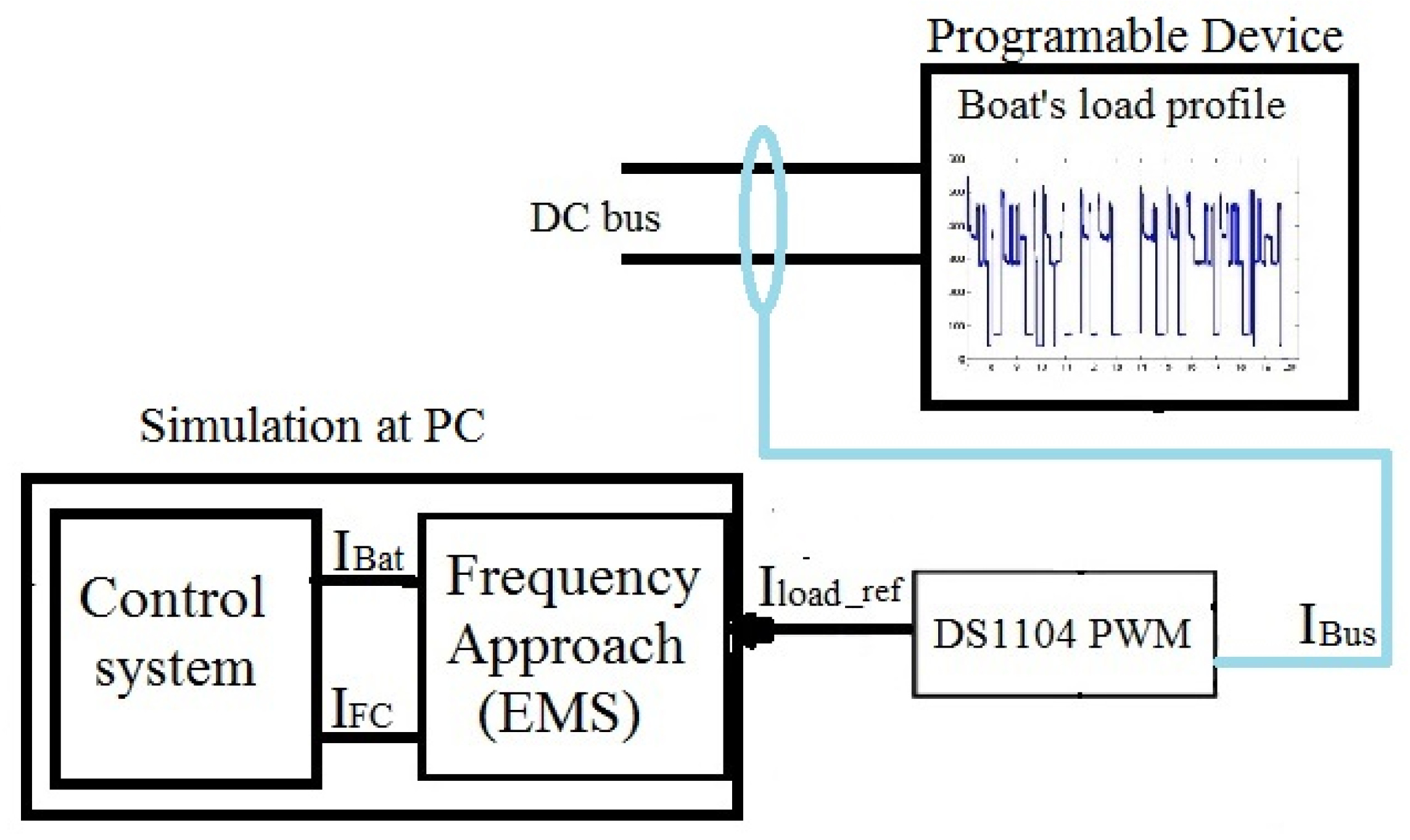
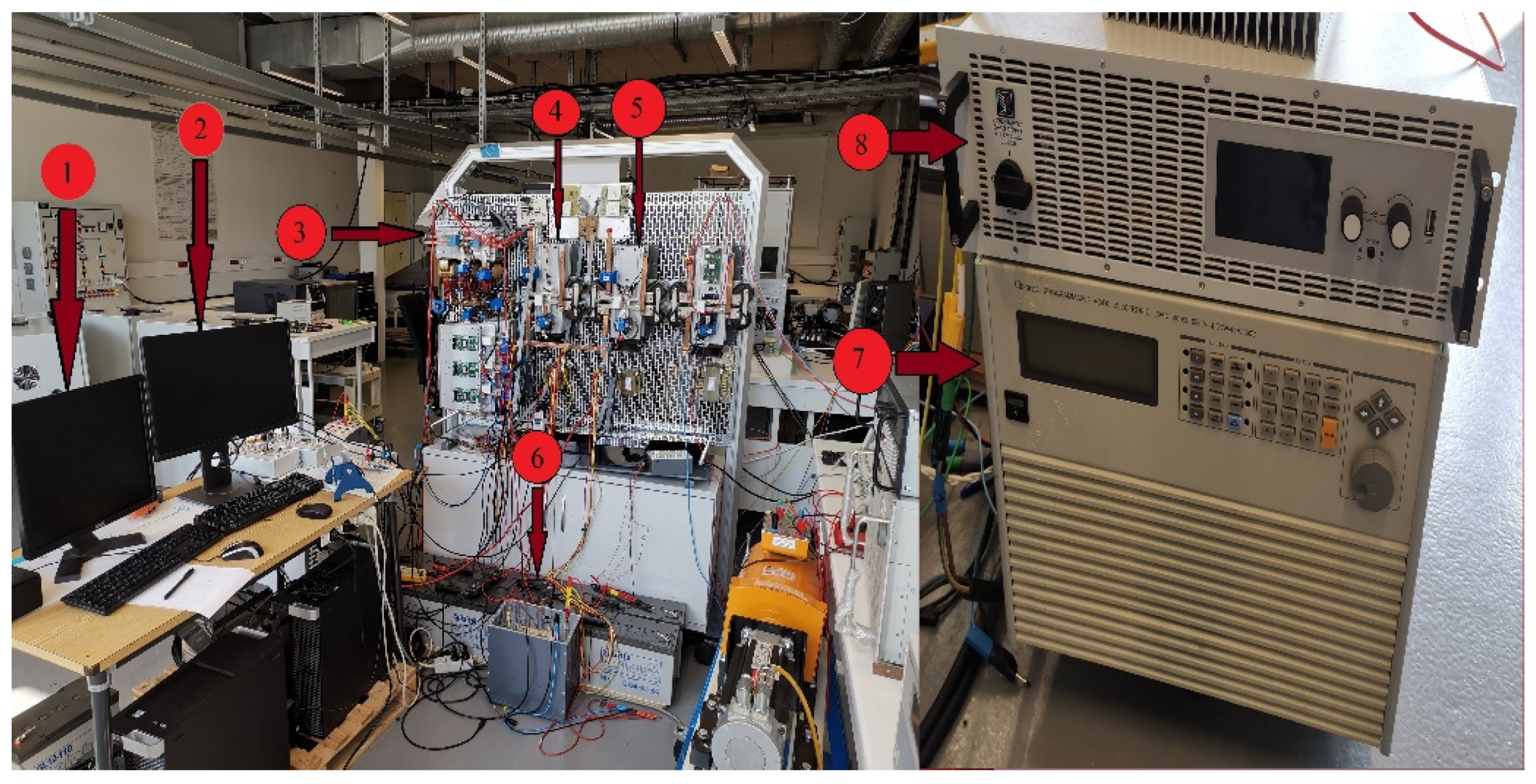
According to the available equipment in the laboratory, the tests are done on a reduced scale of 71. The experimental test bench as shown in
Figure 17. The system consists of two PC systems (1 and 2) that are used to control and measure the test bench. The fuel cell (8) is connected through the interleaved boost converter (3) to the DC bus supplied by a pack of batteries with a total of 500 Ah (6) through DC/DC buck-boost converter (5). The pack of batteries consists of five batteries type LiFePO4 in the series each has 12 V/100 Ah. The load profile (7) has been implemented in programmable DC load (4) which is linked in the DC bus link through the unidirectional buck converter (4).
The voltage reference of the DC bus was fixed to 105 V due to limited voltage of the batteries, while the
FC voltage source was 70 V. The output current of the
FC system is covered by the high frequency components for the frequency approach based on load reference current. The parameters of HEB system used in the test bench are presented in
Table 2.
The power management between the
FC and pack of batteries sources of the HEB has been developed based on the performance of individual energy sources and the suitable controllers for each of them have been adopted. The main principle of the energy management system has been done in
Figure 18. The pack of batteries and
FC source must share the power with variable load in order to maintain the power balance in the HEB system. The control strategies are based on extracting voltage and current references for
FC and batteries, respectively.
During the startup and rapid demand, the power output of the FC source cannot follow the power load required. The deficit of power in these conditions will fluctuate the frequency on the HEB that leads to the current reference for a pack of batteries to discharge batteries depending on the magnitude of deficit current. The batteries cells absorb the additional power as storage energy. If the production power exceeds the maximum capacity of storage batteries, the control system of interleaved boost converter needs to decrease the FC output power to maintain the stability of the DC bus link voltage.
In
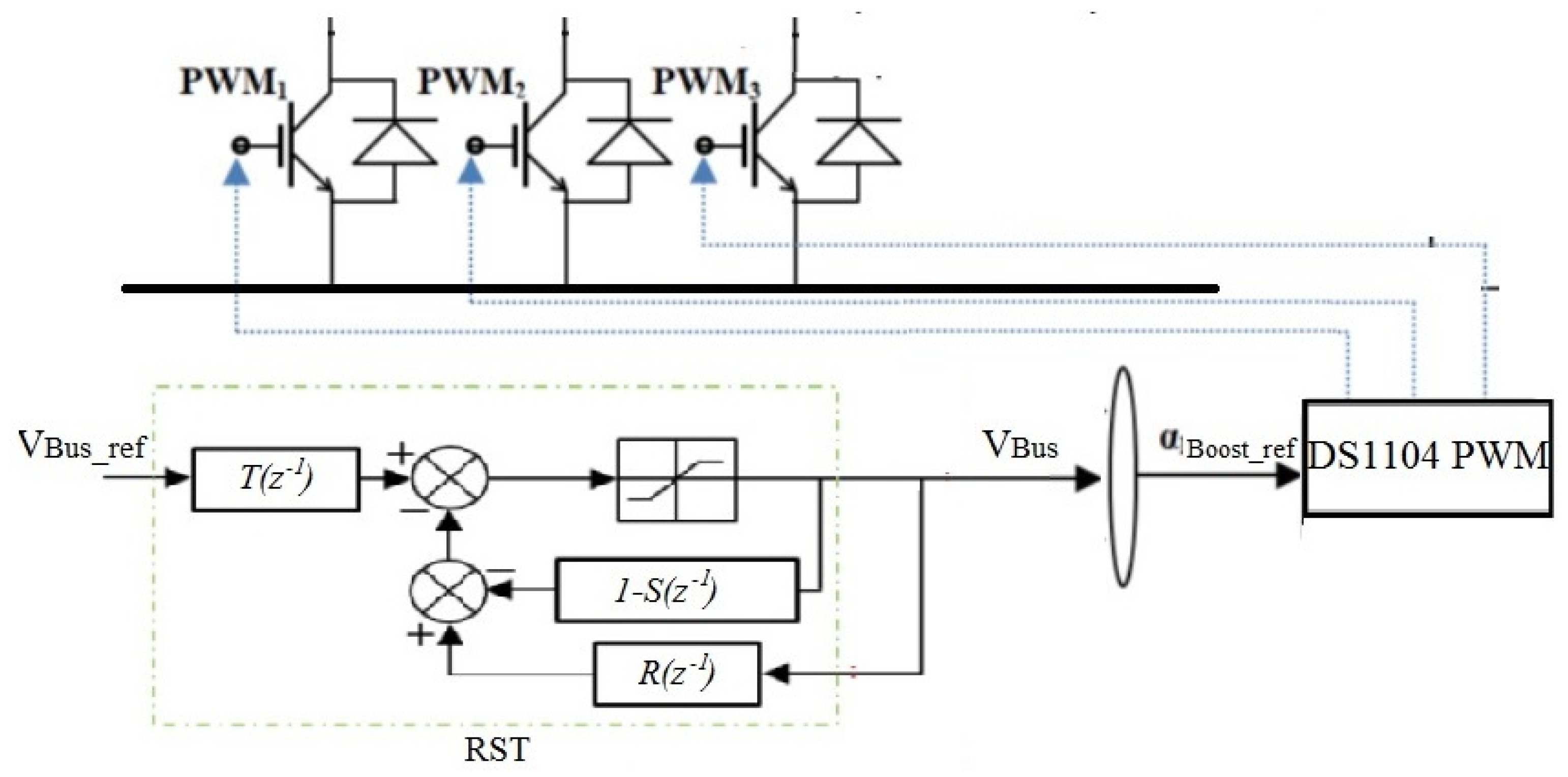
Figure 19, the experimental test shows that the proposed control of DC bus voltage has been maintained around the set point as a reference, with some acceptable error in measurements. The PC1 is used to implement and control the real-time simulation through the Dspace (DS1104 controller) by changing the ratio of duty of IGBT by controlling for PWM for the interleaved boost converter. The measurement of voltage bus has been used to track the reference value required.
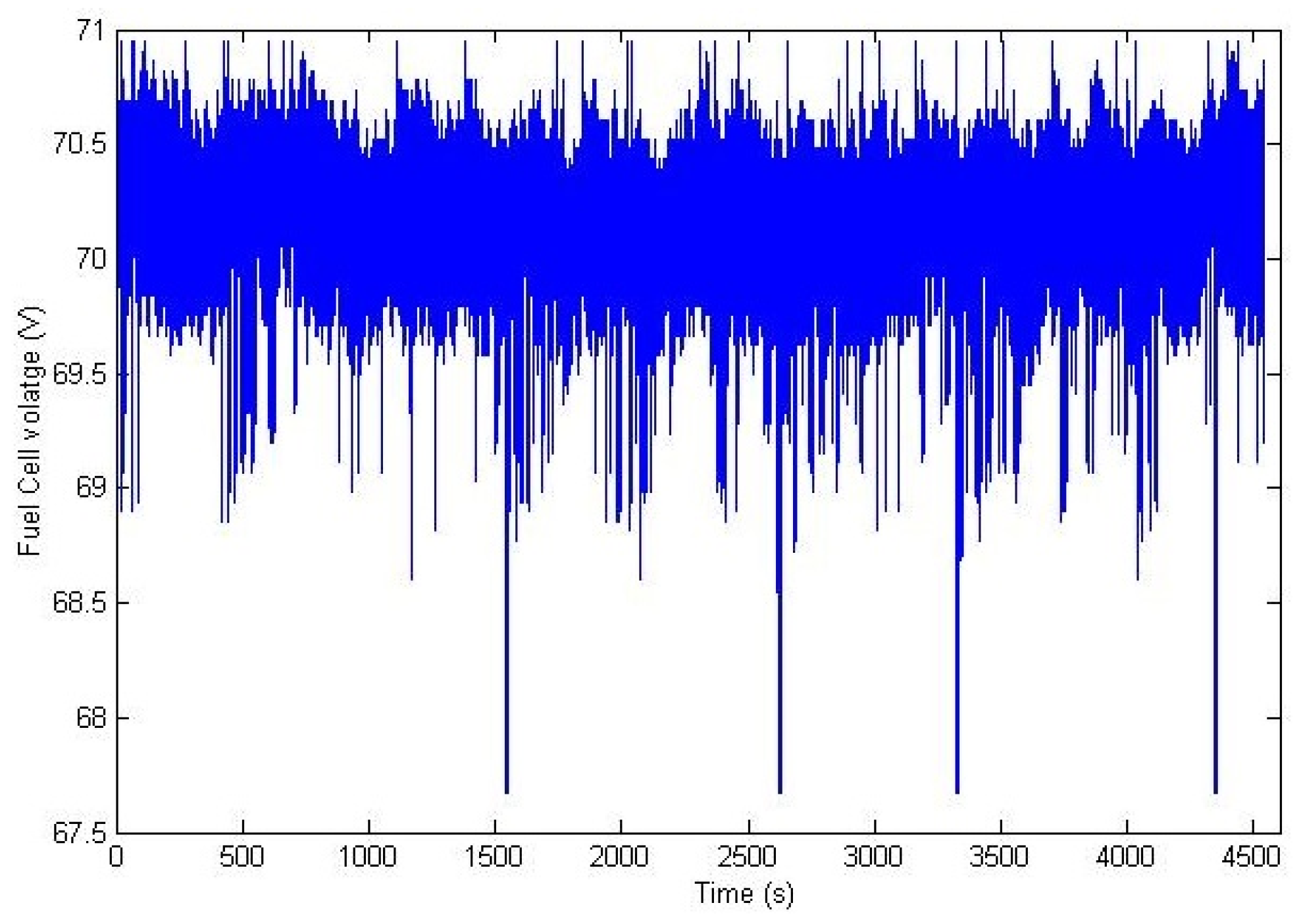
The
FC voltage results are presented in
Figure 20, which is close to the limit voltage requested (70 V). The interleaved boost converter has been controlled to determine the direction and amplitude of current between the DC bus and the fuel cell source as shown in
Figure 21.
The profile has been rescaled according to the laboratory equipment after adding some noise to have dynamic performance. The variation of demand has been controlled in real-time implementation to track the profile of boat’s load, as presented in
Figure 22. The maximum and minimum current of load demand is 8 and 0.7 A, respectively. It shows that the fluctuations of current from the load have been controlled by the PC2 through another Dspace (DS1104 controller) to obtain the best correction between the simulated load profile and the production required for the real-time implementation.
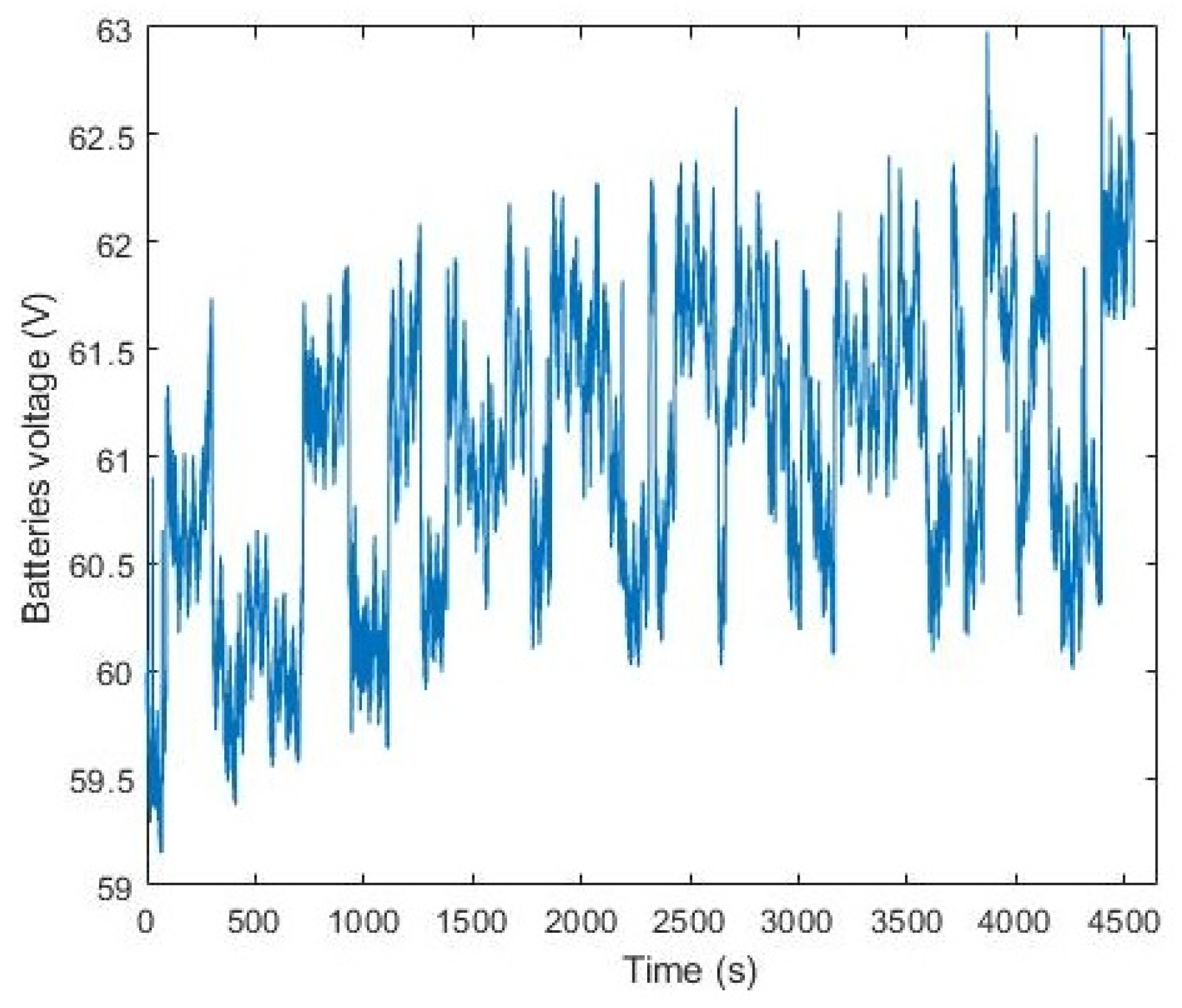
The control strategy of the batteries’ current is based on the RST method to track the current reference extracting from the proposed modified frequency approach. The constant time of frequency approach has been calculated by the simulation part at 189 s taking into account the healthy state of the pack of batteries. The result of battery voltage control with the state of charge management during HEB operation is illustrated in
Figure 23. The battery controller keeps the voltage limitation less than maximum value and more than minimum value to avoid the batteries’ deterioration. The unpredictable battery voltage depends on the components of high frequency for load current.
When
is in the charging status (negative areas), the exceeding production of energy is stored in the batteries. Otherwise, in the discharge status (positive areas), the storage energy is used to ensure the compensation of this energy. The real-time simulation in PC2 sends the PWM for IGBTs into the converter to control the buck-boost converter. The state of the converter as buck or boost is determined according to the sign of current reference extracting from the modified frequency approach. The ratio of a duty cycle is controlled by the RST method to track the reference current required and its direction is shown in
Figure 24. The amplitude of batteries current is fluctuating between positive and negative parts to determine the buck and boost state, respectively.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}