
Design and Development of a Variable Rate Applicator for Real-Time Application of Fertilizer


Abstract
:1. Introduction
2. Materials and Methods
2.1. Fertilizer Specifications
2.2. Fertilizer Metering Mechanism Specification
2.3. Design Specification
2.4. N Sensor
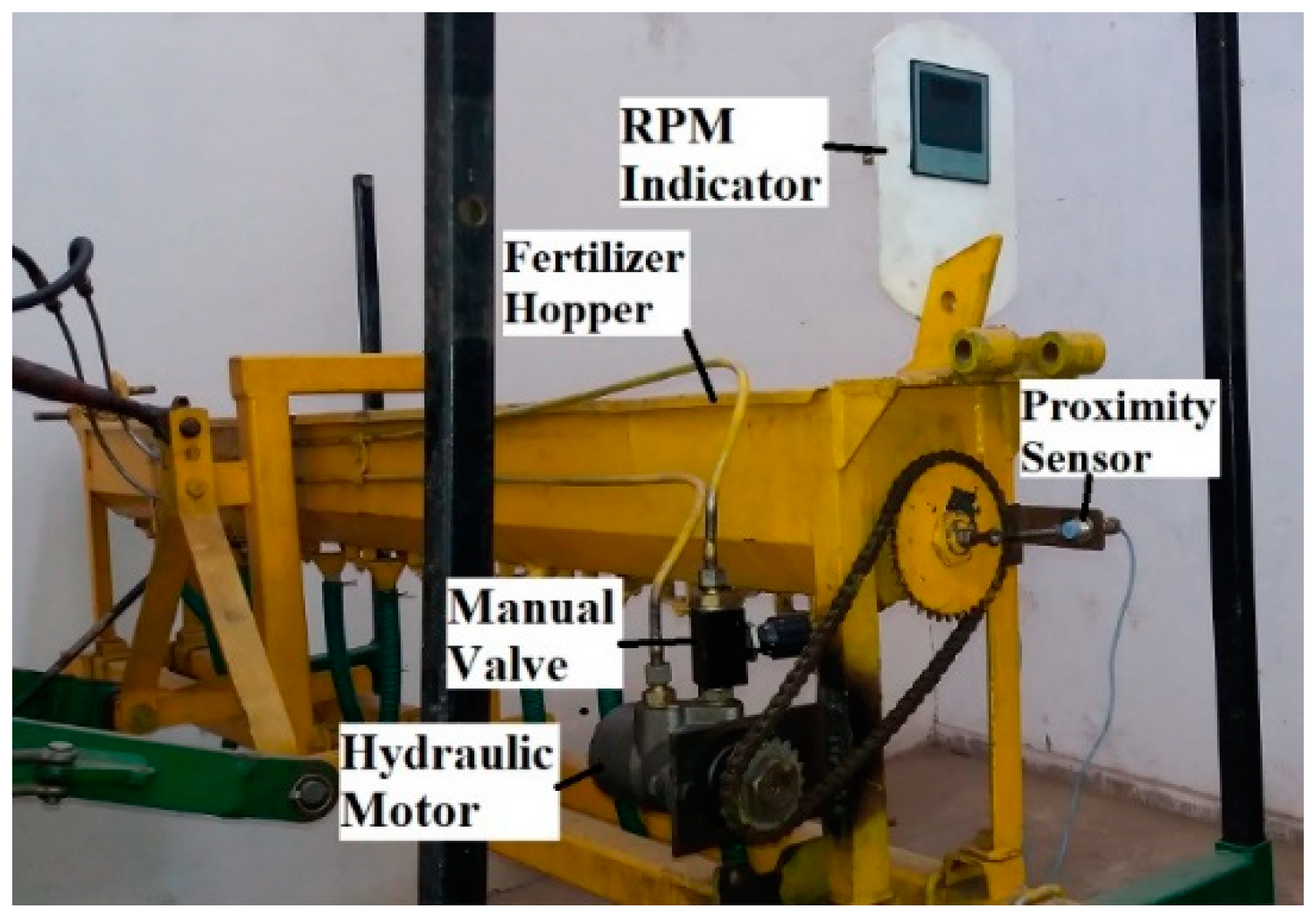
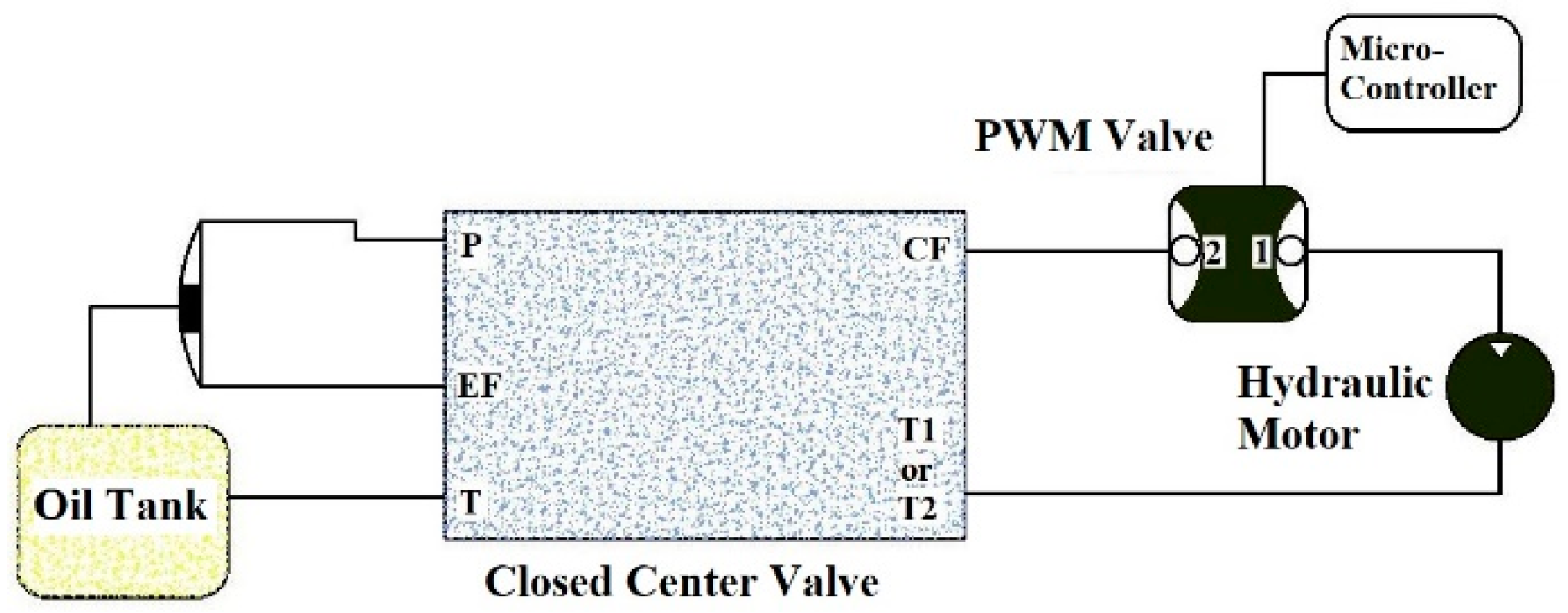
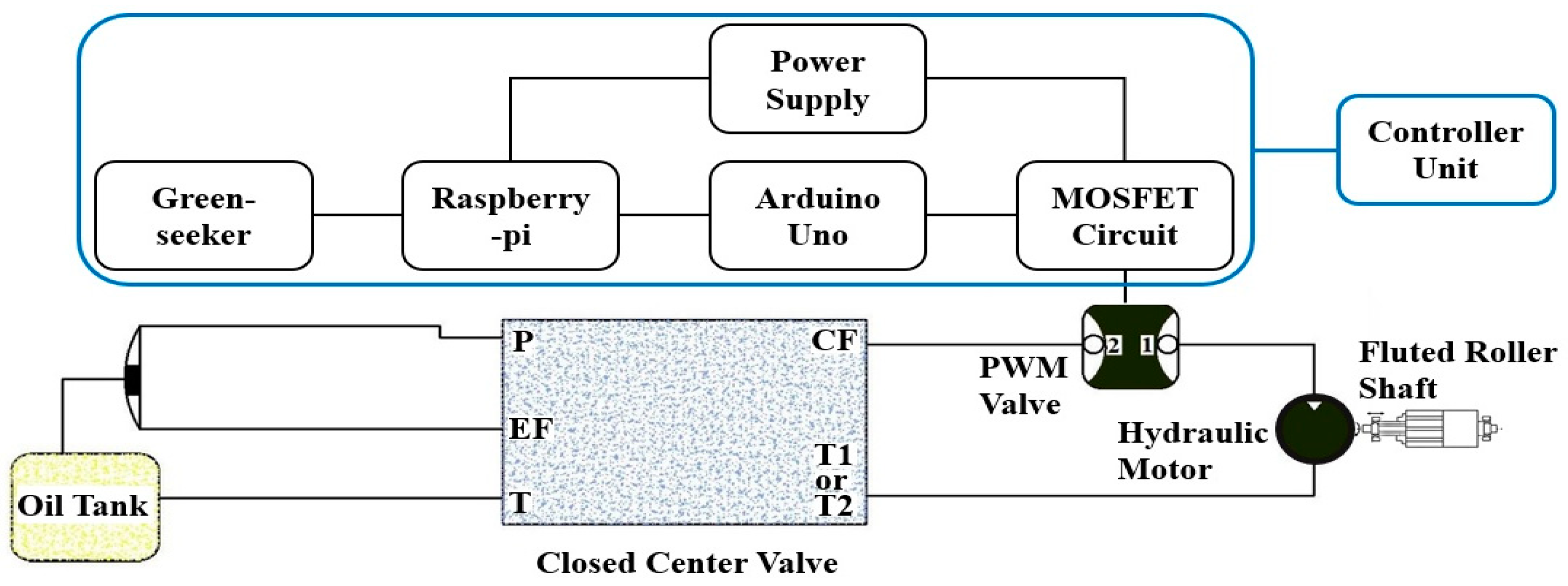
2.5. Hydraulic System
2.5.1. Hydraulic Fluid Flow System
2.5.2. Hydraulic Hoses
2.5.3. Hydraulic Motor
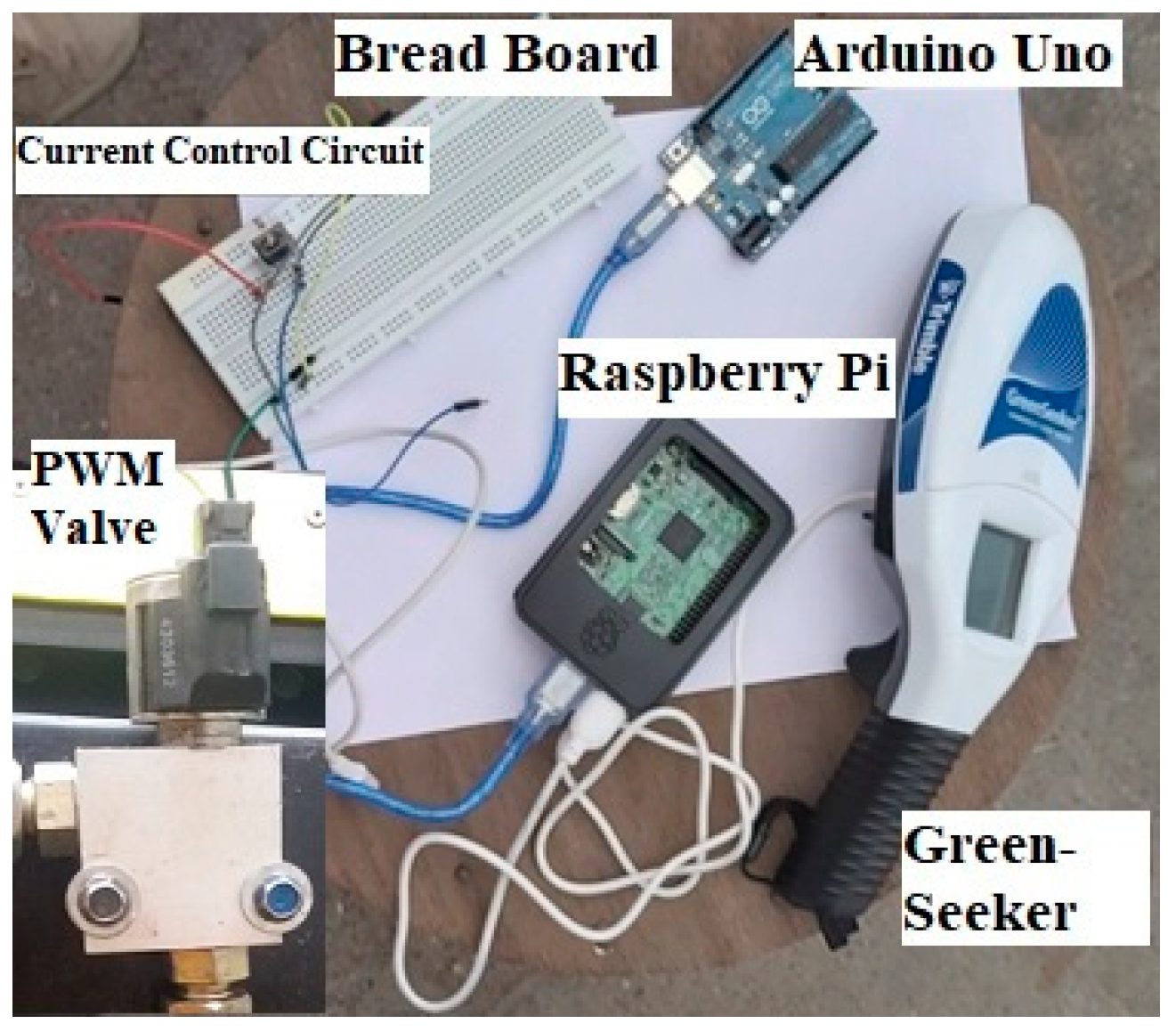
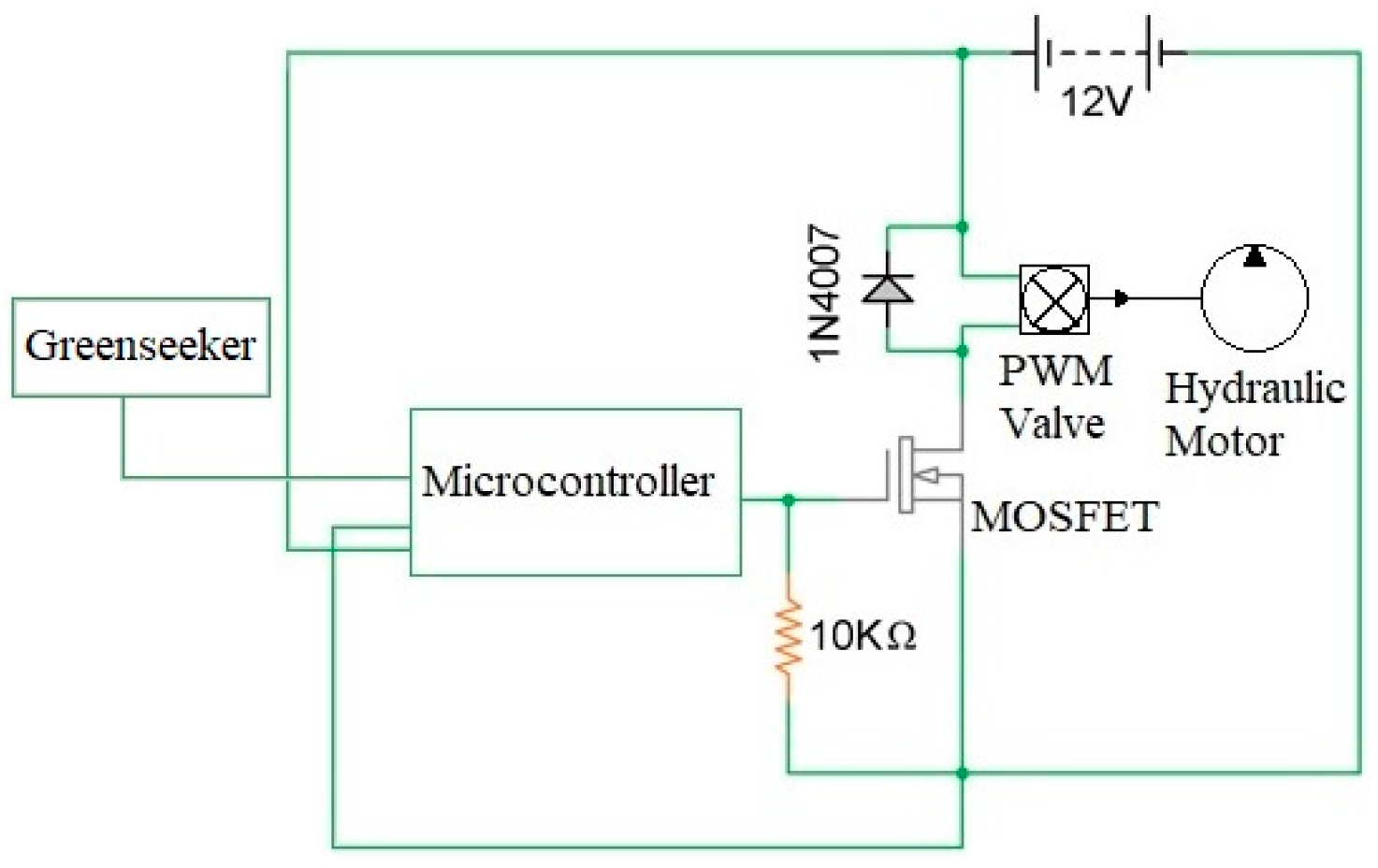
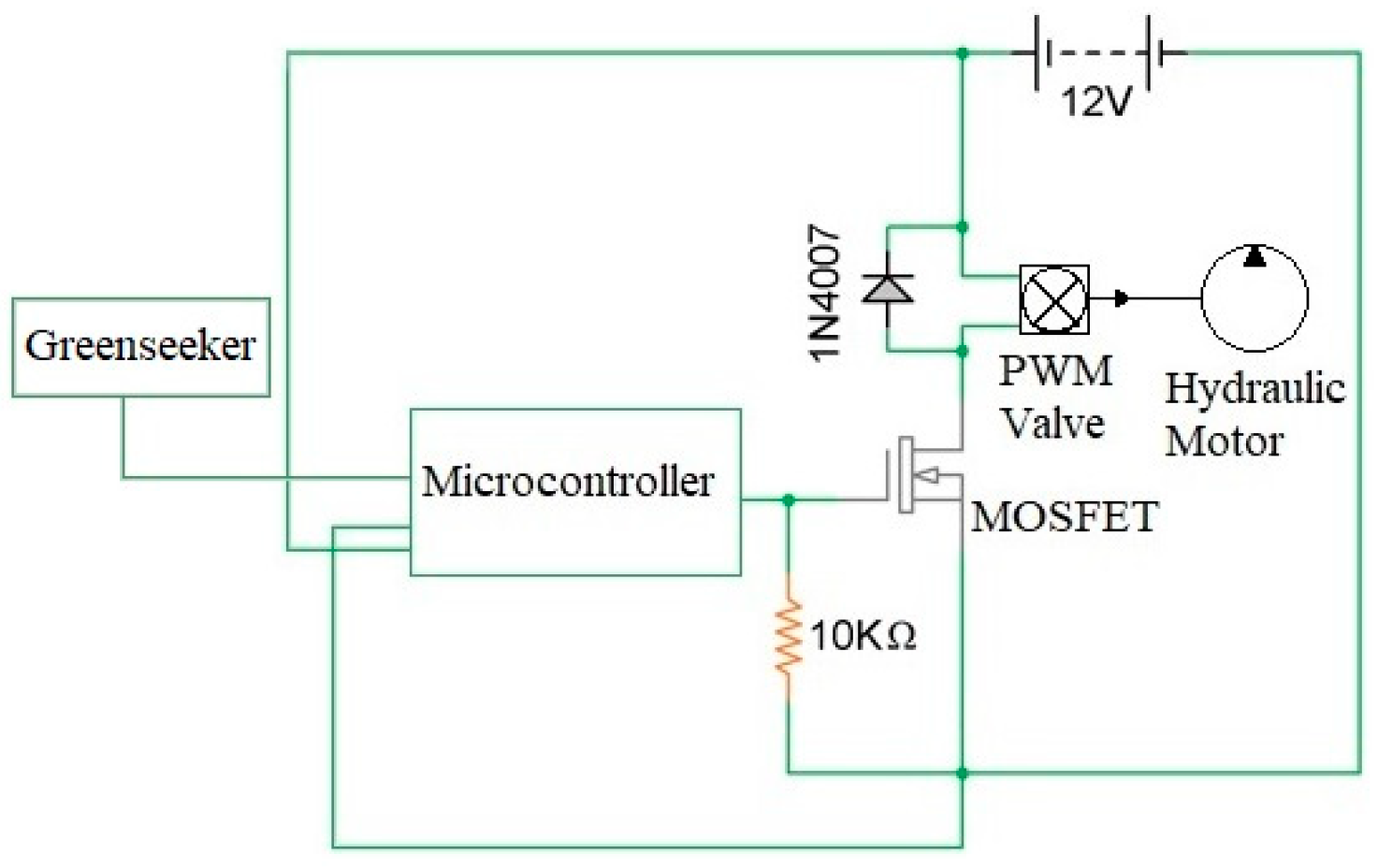
2.6. Development of Controller System
2.6.1. Control Unit
2.6.2. Software Section/Control Software
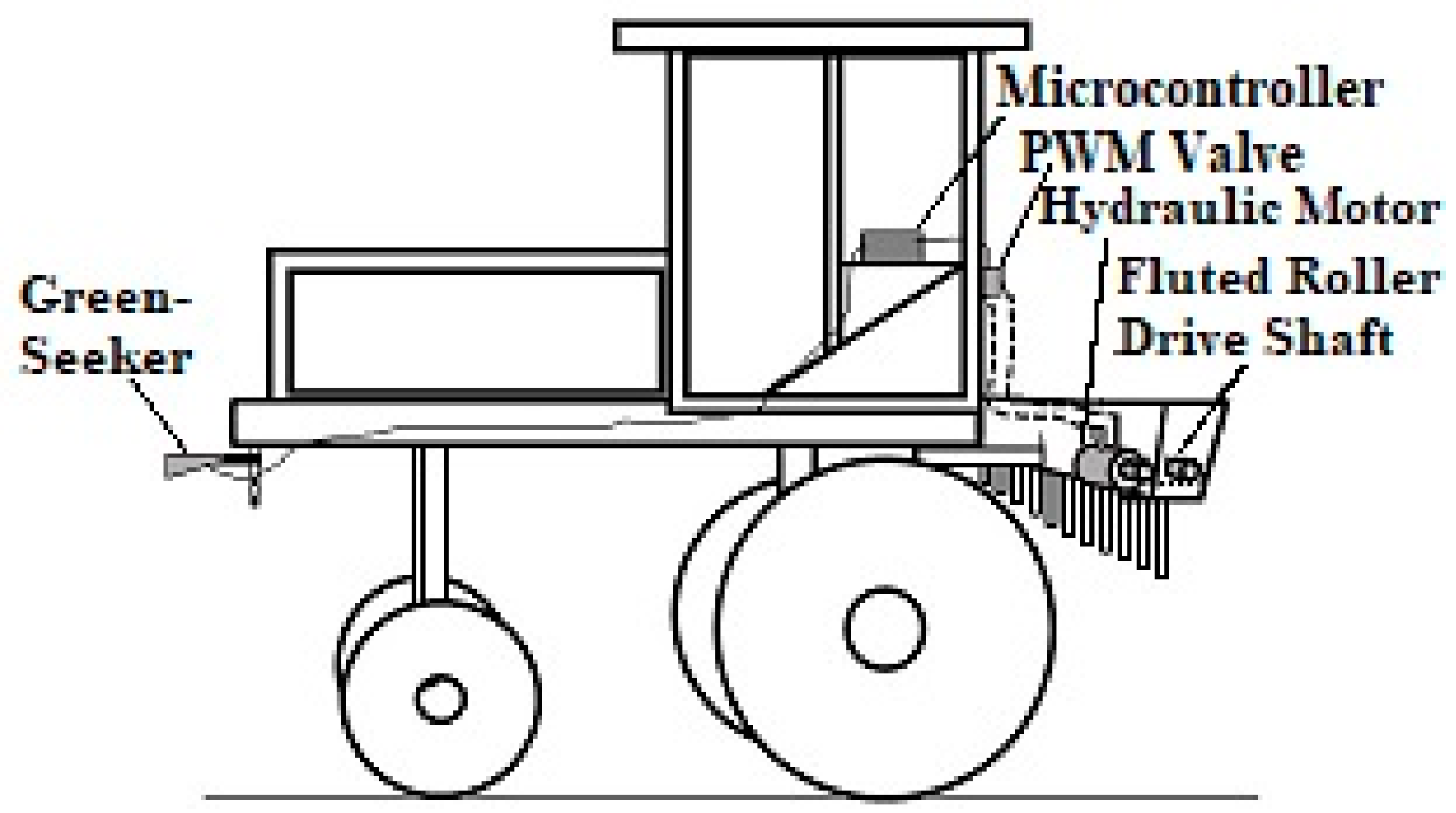
2.7. Integration of Different Systems of the Variable Rate Real-Time Fertilizer Applicator
2.8. Evaluation of the Variable Rate Real-Time Fertilizer Applicator
2.8.1. Calibration of the Fertilizer Metering Mechanism
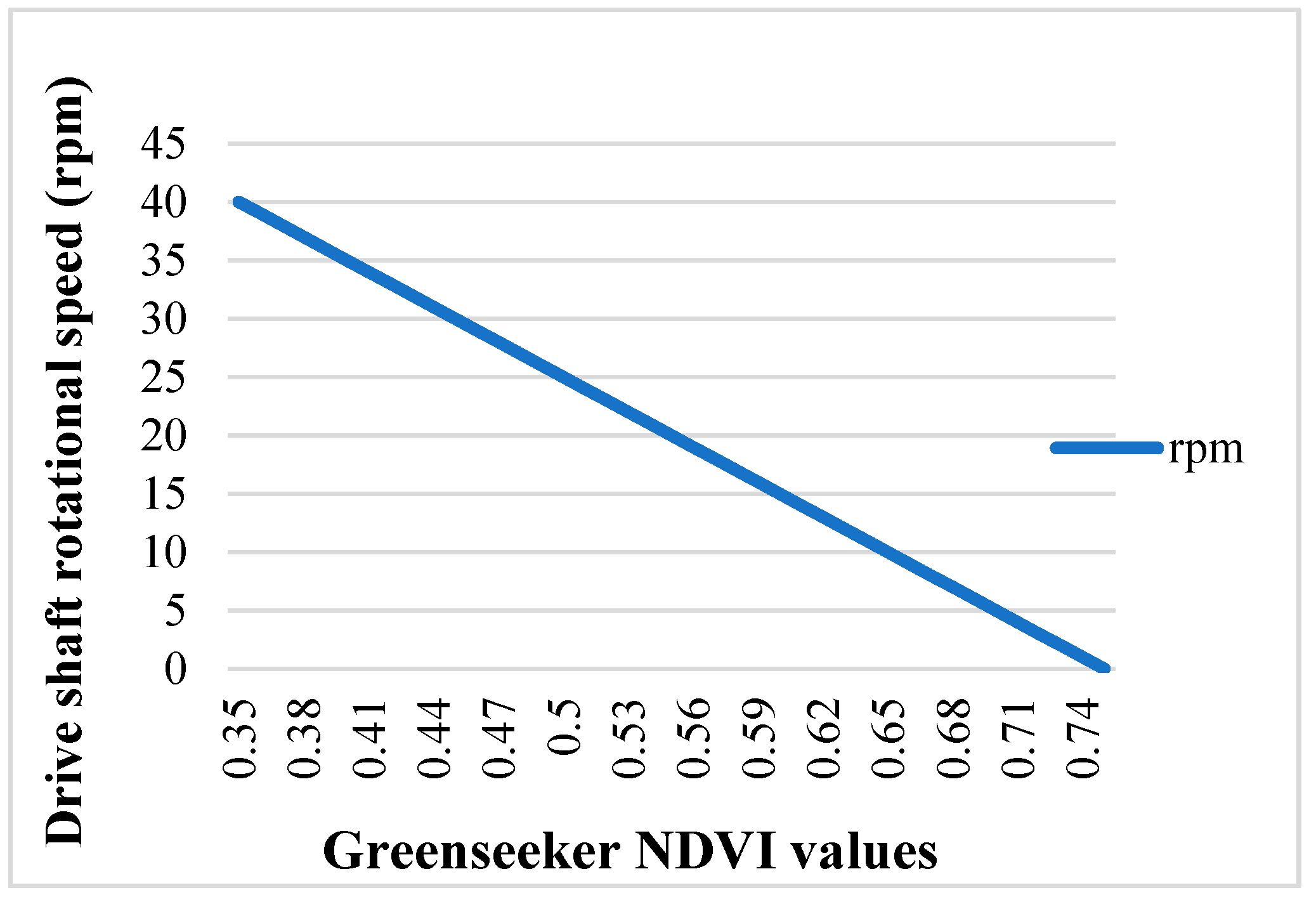
2.8.2. Variation in Rotational Speed of Metering Mechanism Drive Shaft with Corresponding Crop NDVI Sensed by Greenseeker
2.8.3. Amount of N Fertilizer Applied by Applicator
2.8.4. Evaluating the Real-Time Variable Fertilizer Applicator Response Time
2.8.5. Field Evaluation of the Real-Time Variable Rate Fertilizer Applicator
2.8.6. Plan of Experiment on Test Evaluation of Variable Rate Fertilizer Applicator
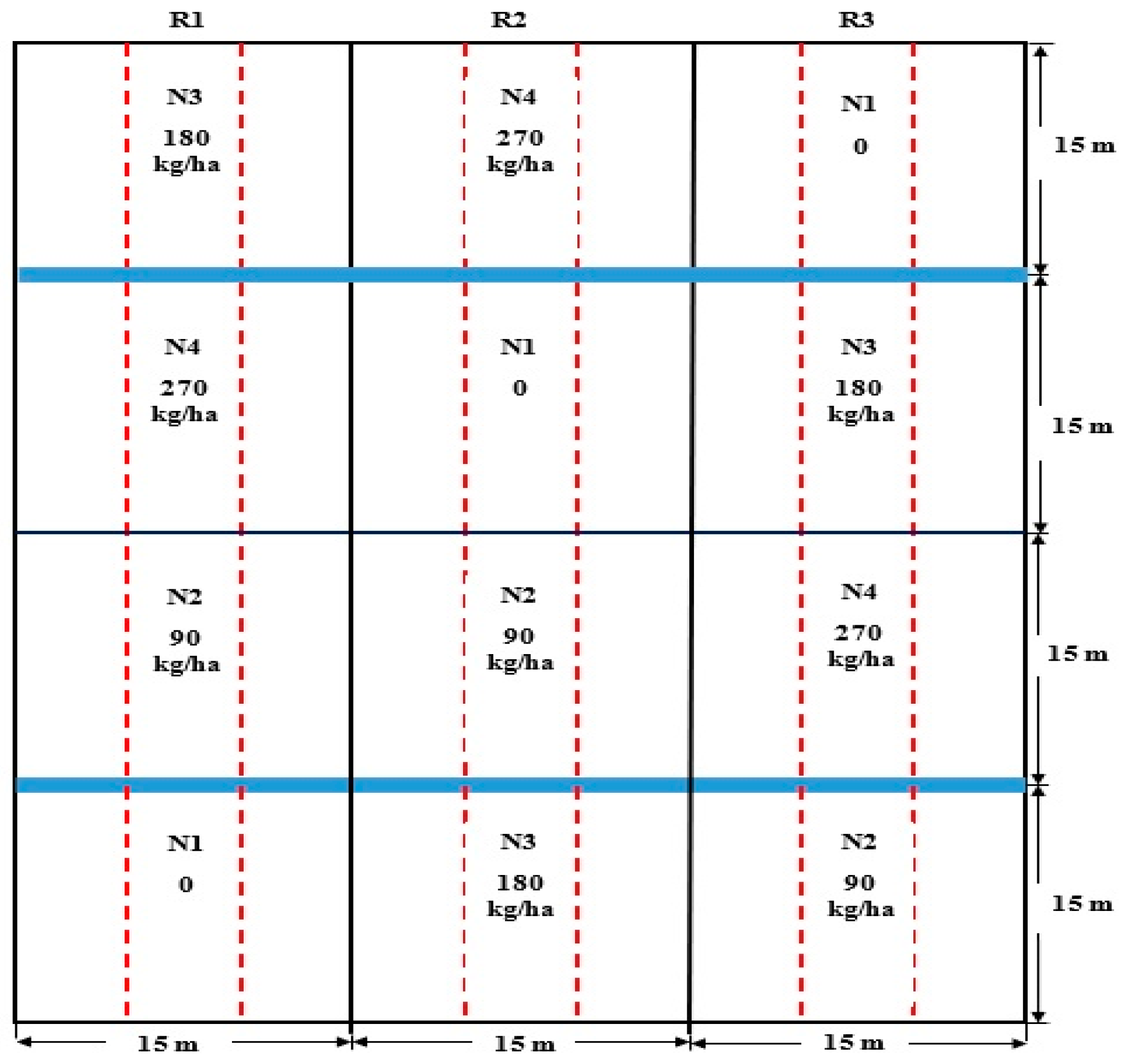
2.8.7. Experimental Field Layout
2.8.8. Nitrogen Level
3. Results and Discussion
3.1. Fertilizer Metering Mechanism Calibration
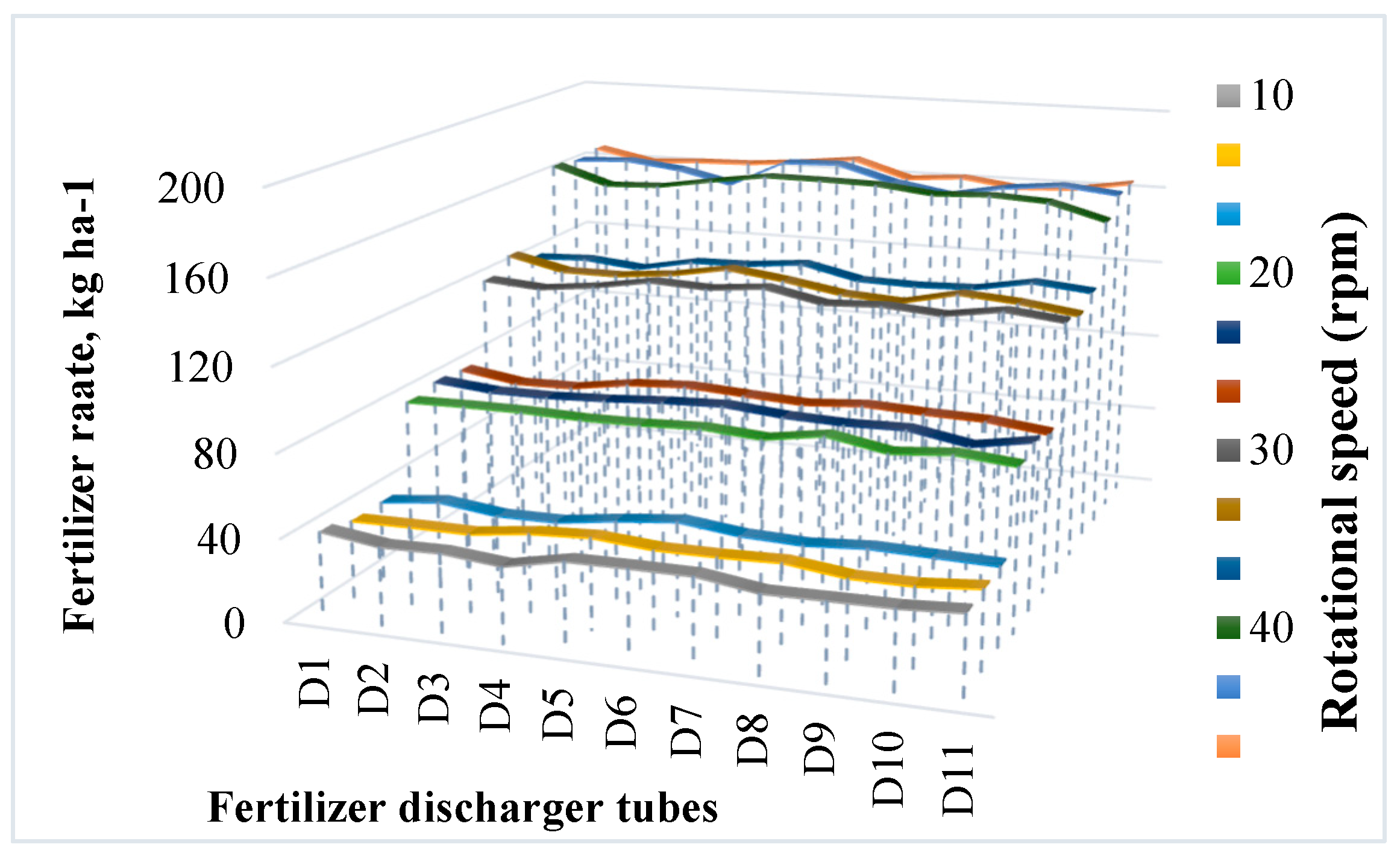
3.2. Effect of Fluted Roller Drive Shaft Rotational Speed on Fertilizer Rate and Variation among Fertilizer Discharger Tubes
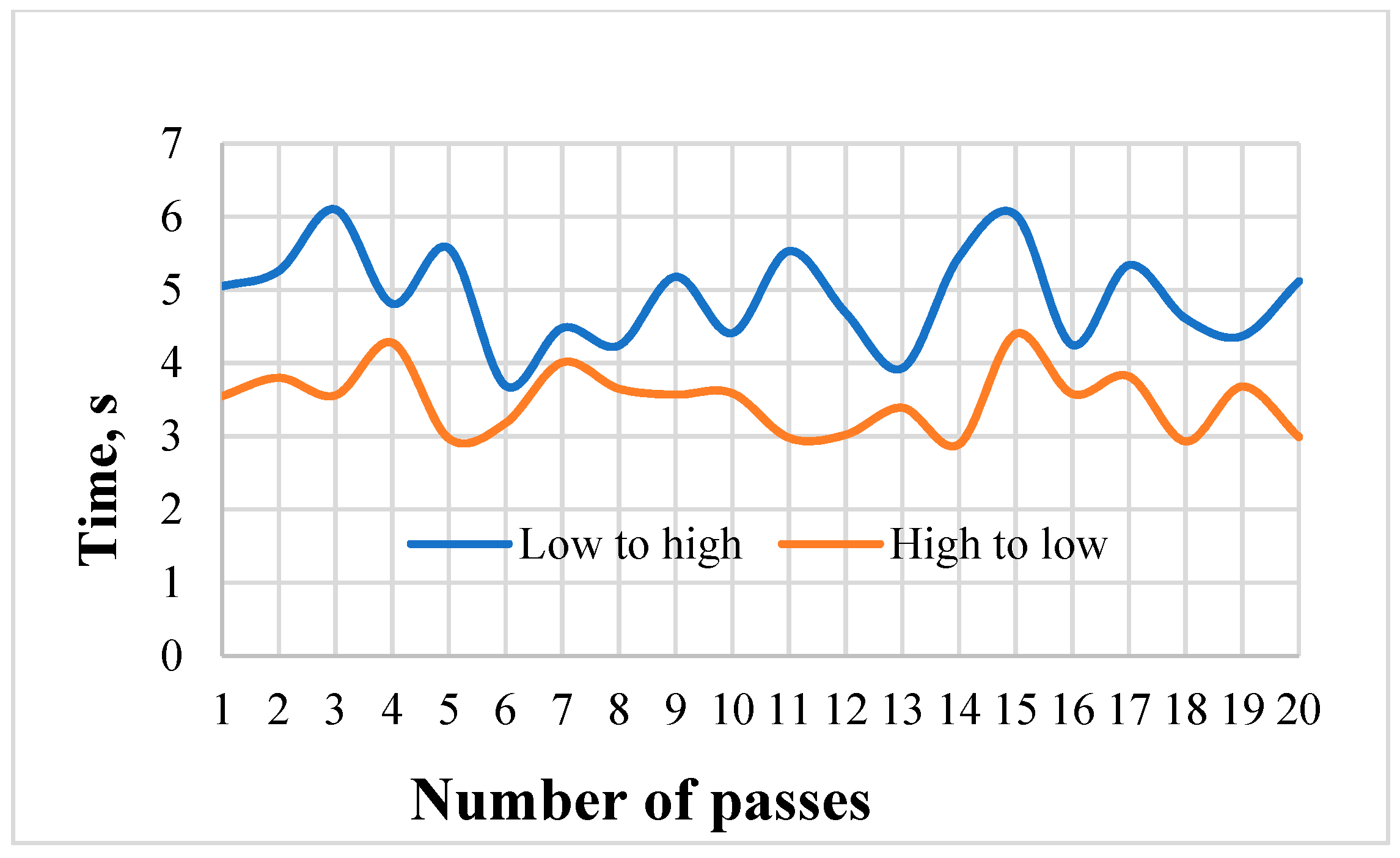
3.3. Response Time
3.4. Application of Fertilizer 60 Days after Sowing (60 DAS), before Second Irrigation of Wheat Crop Using Variable Rate Applicator
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Department of Agriculture, Cooperation and Farmers’ Welfare; Ministry of Agriculture & Farmers’ Welfare; Government of India. Report of Committee on Doubling Farmers’ Income. 2017. Available online: http://agricoop.nic.in/doubling-farmers (accessed on 17 September 2018).
- Food and Agriculture Organization of the United Nations. World Fertilizer Trends and Outlook to 2020, pp. 1–53. Available online: http://www.fao.org/3/i6895e/i6895e.pdf (accessed on 3 May 2020).
- Burns, I.G. The effects of continuity of early nitrogen nutrition on growth and development of Lactuca sativa. In Plant Nutrition—Physiology and Applications; Springer: Dordrecht, The Netherlands, 1990; pp. 545–549. [Google Scholar]
- Larson, W.E.; Robert, P.C.; Rust, R.H. Proceedings of soil specific crop managementa workshop on research and development issues. In Proceedings of the Workshop, Soil Specific Crop Management 1th, (No. LC-0088), Minneapolis, MN, USA, 14–16 April 1992; Department of Soil Science, Minnesota Extension Service University of Minnesota: St. Paul, MN, USA, 1993. [Google Scholar]
- Bahri, A. Modulating Wheat Seeding Rate for Site Specific Crop Management. Ph.D. Thesis, University of Nebraska, Lincoln, NE, USA, 1996. [Google Scholar]
- Maleki, M.R.; Mouazen, A.M.; De Ketelaere, B.; Ramon, H.; De Baerdemaeker, J. On-the-go variable-rate phosphorus fertilisation based on a visible and near-infrared soil sensor. Biosyst. Eng. 2008, 99, 35–46. [Google Scholar] [CrossRef]
- Tola, E.; Kataoka, T.; Burce, M.; Okamoto, H.; Hata, S. Granular fertiliser application rate control system with integrated output volume measurement. Biosyst. Eng. 2008, 101, 411–416. [Google Scholar] [CrossRef]
- Jafari, M.; Hemmat, A.; Sadeghi, M. Development and performance assessment of a DC electric variable-rate controller for use on grain drills. Comput. Electron. Agric. 2010, 73, 56–65. [Google Scholar] [CrossRef]
- Anderson, N.W.; Homburg, D.S. Application Equipment for Site-Specific Management. In The State of Site Specific Management for Agriculture; Pierce, F.J., Sadler, E.J., Eds.; American Society of Agronomy: Madison, WI, USA, 1997; pp. 245–281. [Google Scholar]
- Kim, Y.J.; Kim, H.J.; Ryu, K.H.; Rhee, J.Y. Fertiliser application performance of a variable-rate pneumatic granular applicator for rice production. Biosyst. Eng. 2008, 100, 498–510. [Google Scholar] [CrossRef]
- Yu, J.H.; Kim, Y.J.; Yu, K.H. Development of a controller for variable-rate application of granular fertilizer in paddy farming. In ASAE Annual Meeting, Oregon, 2006; American Society of Agricultural and Biological Engineers: Saint Joseph, MI, USA, 2006. [Google Scholar]
- Huffmeyer, E.H. Inclinometer-Controlled Apparatus for Varying the Rate of Seed Population. U.S. Patent 6,640,733, 4 November 2003. [Google Scholar]
- Drummond, P.E.; Christy, C.; Lund, E.; Kejr Inc. Variable Rate Drive. U.S. Patent Application 09/870,174, 5 December 2002. [Google Scholar]
- Landphair, D.K.; Myers, C.A. Variable Speed Drive for Agricultural Seeding Machines. U.S. Patent 7,273,016, 25 September 2007. [Google Scholar]
- Iida, M.; Umeda, M.; Radite, P.A.S. Variable rate fertilizer applicator for paddy field. In ASAE Annual Meeting, California, 2001; American Society of Agricultural and Biological Engineers: Saint Joseph, MI, USA, 2001. [Google Scholar]
- Talha, Z.; Tola, E.; Al-Gaadi, K.A.; Kheiralla, A.F. Pneumatic system for granular fertilizer flow rate control. Middle East J. Sci. Res. 2011, 8, 688–693. [Google Scholar]
- Koundal, A.; Singh, M.; Sharma, A.; Mishra, P.K.; Sharma, K. Development and evaluation of an experimental machine for Variable Rate Application of granular fertilizers. In Proceedings of the Sixth IEEE International Conference on Sensing Technology, Kolkata, India, 18–21 December 2012. [Google Scholar]
- Benjamin, E.; Krishnan, D.A.; Kavitha, R. Development of Fertilizer Broadcaster with Electronically Controlled Fluted Roller Metering Mechanism for Paddy Crop. Int. J. Curr. Microbiol. Appl. Sci. 2019, 8, 2694–2703. [Google Scholar] [CrossRef]
- Van Loon, J.; Speratti, A.B.; Gabarra, L.; Govaerts, B. Precision for smallholder farmers: A small-scale-tailored variable rate fertilizer application kit. Agriculture 2018, 8, 48. [Google Scholar] [CrossRef] [Green Version]
- Ali, A.M.; Thind, H.S. A framework for refining nitrogen management in dry direct-seeded rice using GreenSeeker™ optical sensor. Comput. Electron. Agric. 2010, 110, 114–120. [Google Scholar] [CrossRef]
- Quebrajo, L.; Pérez-Ruiz, M.; Rodriguez-Lizana, A.; Agüera, J. An approach to precise nitrogen management using hand-held crop sensor measurements and winter wheat yield mapping in a mediterranean environment. Sensors 2015, 15, 5504–5517. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yao, Y.; Miao, Y.; Huang, S.; Gao, L.; Ma, X.; Zhao, G.; Jiang, R.; Chen, X.; Zhang, F.; Yu, K.; et al. Active canopy sensor-based precision N management strategy for rice. Agron. Sustain. Dev. 2012, 32, 925–933. [Google Scholar] [CrossRef] [Green Version]
- Cornell University. Nutrient Management Spear Program, Agronomy Fact Sheet 84: Crop Vigor Sensing for Variable-Rate Nitrogen. Available online: http://nmsp.cals.cornell.edu/guidelines/factsheets.html (accessed on 17 December 2019).
- Package of Practices for the Crops of Punjab. Rabi 2019–2020. Available online: https://www.pau.edu/content/pf/pp_rabi.pdf (accessed on 18 November 2019).
- Shearer, S.A.; Fulton, J.P.; Veal, M.W.; Stombaugh, T.S. Procedures for Evaluating Variable-Rate Granular Material Application Accuracy; ASAE PM-54 Draft Standard: Saint Joseph, MI, USA, 2005. [Google Scholar]
- Walkley, A.; Black, I.A. An examination of the Degtjareff method for determining soil organic matter, and a proposed modification of the chromic acid titration method. Soil Sci. 1934, 37, 29–38. [Google Scholar] [CrossRef]
- Olsen, S.R. Estimation of Available Phosphorus in Soils by Extraction with Sodium Bicarbonate; US Department of Agriculture: Washington, DC, USA, 1954; pp. 1–19.
- Pratt, P.F.P. Methods of Soil Analysis: Part 2 Chemical and Microbiological Properties. Am. Soc. Agron. Inc. 1965, 9, 1022–1030. [Google Scholar]
- Fulton, J.P.; Shearer, S.A.; Chabra, G.; Higgins, S.F. Performance assessment and model development of a variable–rate, spinner–Disc fertilizer applicator. Trans. ASAE 2001, 44, 1071–1081. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| N Levels (kg ha−1) | NDVI Values | Drive Shaft Rotational Speed (rpm) | Fertilizer Rate (kg ha−1) |
|---|---|---|---|
| N1 = 0 | 0.56 | 20 | 78.36 |
| N2 = 90 | 0.63 | 12 | 48.83 |
| N3 = 180 | 0.69 | 6 | 24.19 |
| N4 = 270 | 0.78 | 0 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mirzakhaninafchi, H.; Singh, M.; Bector, V.; Gupta, O.P.; Singh, R. Design and Development of a Variable Rate Applicator for Real-Time Application of Fertilizer. Sustainability 2021, 13, 8694. https://doi.org/10.3390/su13168694
Mirzakhaninafchi H, Singh M, Bector V, Gupta OP, Singh R. Design and Development of a Variable Rate Applicator for Real-Time Application of Fertilizer. Sustainability. 2021; 13(16):8694. https://doi.org/10.3390/su13168694
Chicago/Turabian StyleMirzakhaninafchi, Hasan, Manjeet Singh, Vishal Bector, O. P. Gupta, and Rajvir Singh. 2021. "Design and Development of a Variable Rate Applicator for Real-Time Application of Fertilizer" Sustainability 13, no. 16: 8694. https://doi.org/10.3390/su13168694
APA StyleMirzakhaninafchi, H., Singh, M., Bector, V., Gupta, O. P., & Singh, R. (2021). Design and Development of a Variable Rate Applicator for Real-Time Application of Fertilizer. Sustainability, 13(16), 8694. https://doi.org/10.3390/su13168694