
Corridor-Wise Eco-Friendly Cooperative Ramp Management System for Connected and Automated Vehicles


Abstract
:1. Introduction
1.1. Background
1.2. Motivation
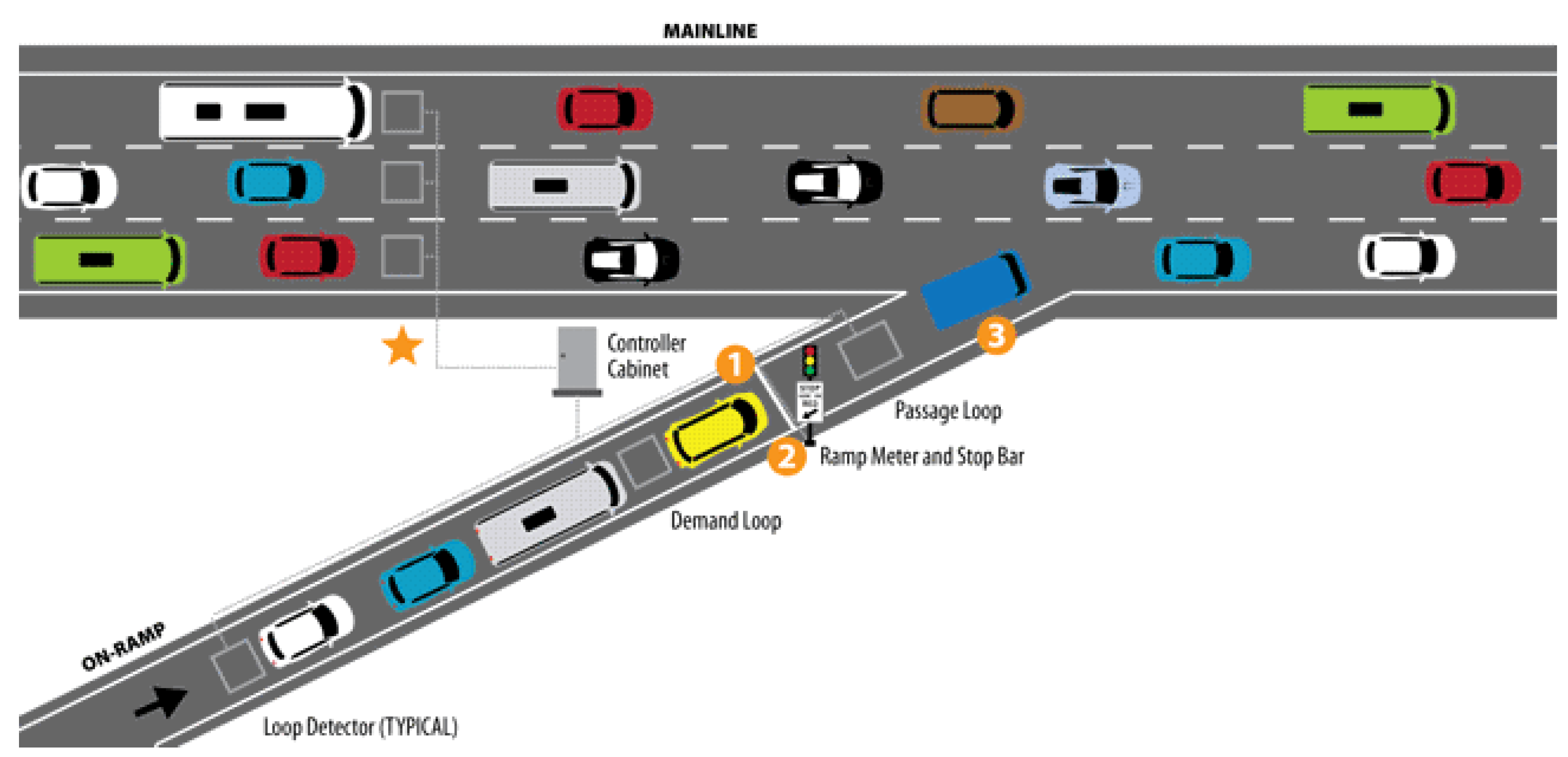
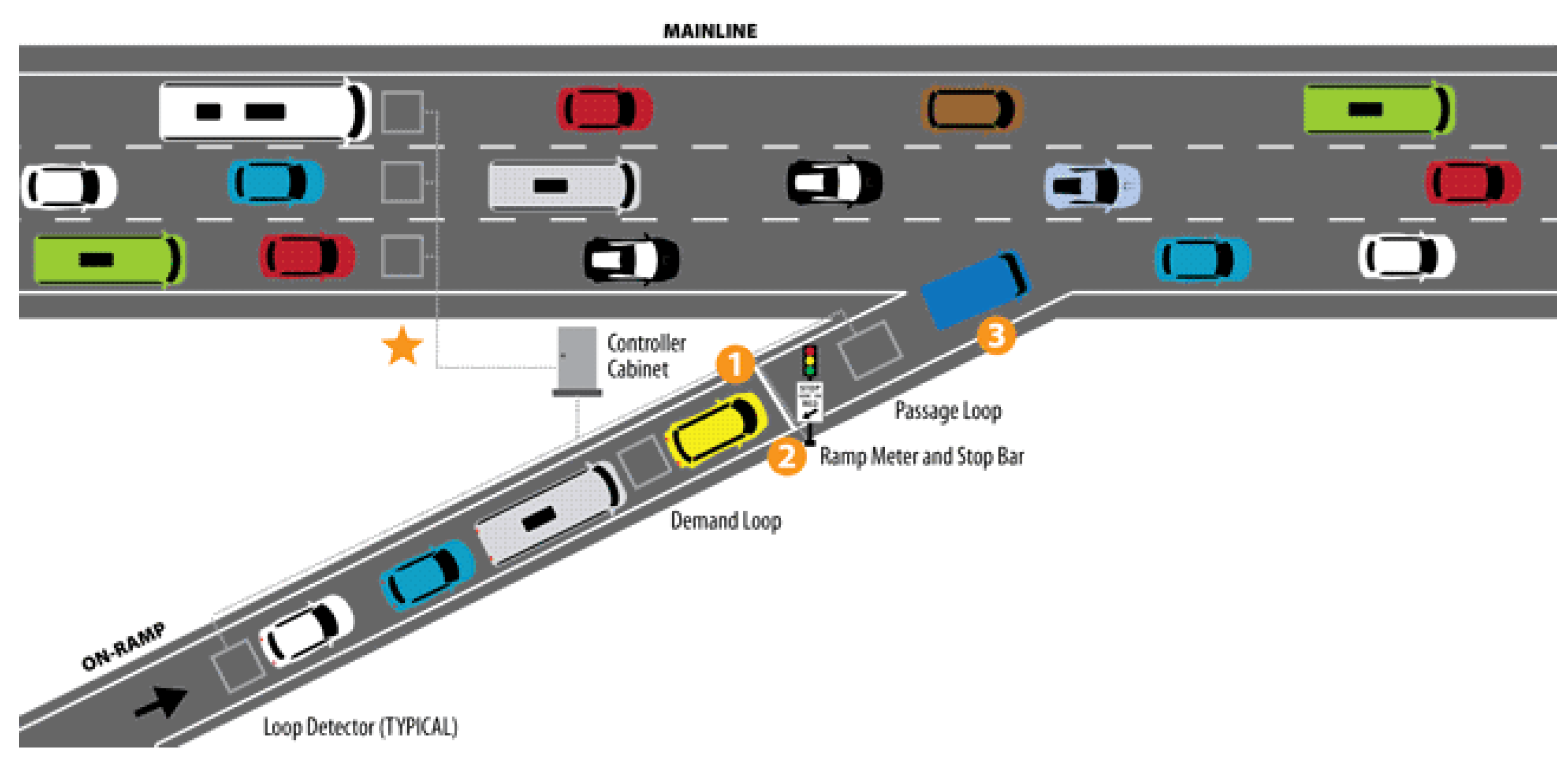
- Conventional ramp metering relies on traffic state estimation from loop detectors that may not be accurate enough to represent real-time traffic conditions and provide detailed guidance for merging maneuvers;
- The traffic signals may introduce unnecessary stop-and-go maneuvers to the on-ramp vehicles, which leads to extra travel time and excessive energy consumption, particularly for heavy-duty trucks;
- The ramp metering system leaves ramp vehicles a much smaller space in which to adjust their speeds to merge into the mainline stream (due to mandatory stops at the meter), which increases the safety risks.
- Most of the existing studies only focus on the control of an isolated ramp merging area. The control effect on the down-/up-stream traffic is unknown. The uncoordinated traffic management across multiple ramps along a corridor may mitigate the benefit provided by the local optimal controller;
- Numerous CAV-based cooperative ramp control algorithms have been developed to improve system mobility and to show environmental benefits, but very few of them are energy-oriented. In addition, most of them assume the first-come-first-serve (FCFS) sequencing strategy for simplicity, which cannot guarantee the system optimum;
- Most of the research validates the system performance within a limited scope (e.g., using numerical simulation or applying the simulation with only a handful of CAVs). However, such validation methods may not be able to explore the long-term impacts on the traffic across a wide variety of scenarios.
1.3. Contributions of This Paper
- To our best knowledge, this is the first of its kind corridor-wise cooperative ramp management system for CAVs, which can coordinate the merging maneuvers of vehicles both macroscopically and microscopically along a corridor with multiple ramps;
- The proposed system is fully energy oriented. The merging sequence is determined directly and is based on energy consumption rather than FCFS. Energy-efficient speed trajectories are developed to regulate the ramp inflow rate;
- We evaluate the proposed system for both gasoline vehicles and electric vehicles, with a real-world network coded in PTV VISSIM [4]. The system performance is evaluated in terms of mobility, safety, and environmental sustainability.
1.4. Organization of the Paper
2. Literature Review
2.1. Ramp Metering
2.2. Cooperative Ramp Merging for CAVs
3. Problem Formulation and System Architecture
3.1. Problem Formulation
3.1.1. Assumptions
- All vehicles are Connected and Automated Vehicles (CAVs);
- Vehicle information, such as position and speed, can be precisely captured and shared with each other as well as with the central traffic management unit via vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communications, respectively;
- The communication delay and package loss are not considered.
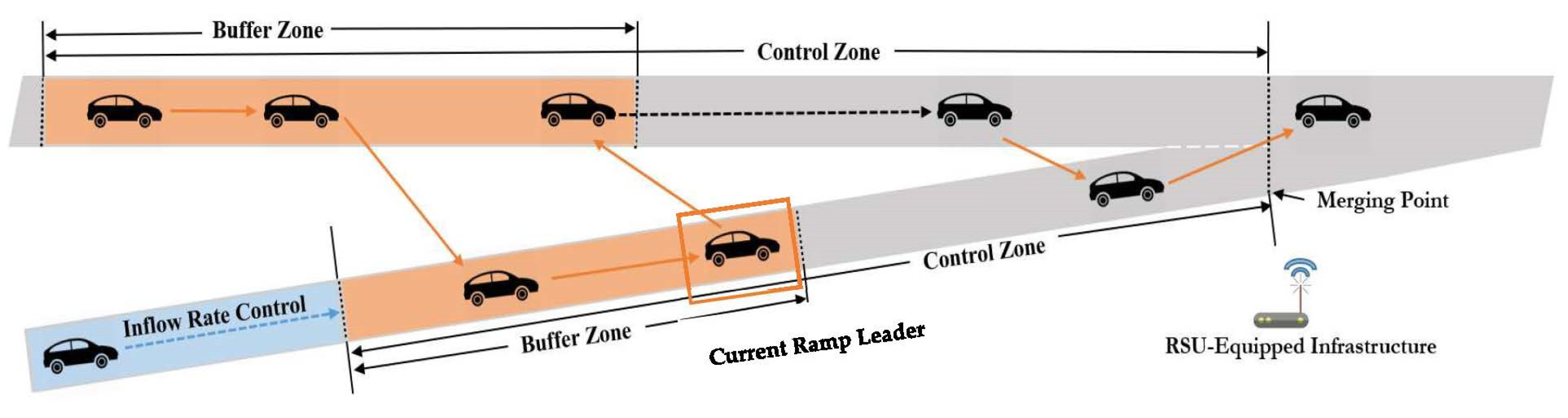
- Vehicles can receive and strictly follow the control instructions, i.e., acceleration or deceleration, from the central traffic management unit, which may be a roadside unit (RSU) deployed at each ramp. It can collect the data from CAVs within a certain range, estimate the traffic conditions, communicate with other traffic management units along the corridor, and calculate the detailed control instructions for the CAVs;
- Cooperative maneuvers for ramp merging are only considered longitudinally. In the simulation study, lateral control is handled by default model behavior.
3.1.2. Vehicle Dynamics
3.1.3. Optimization Problem Formulation
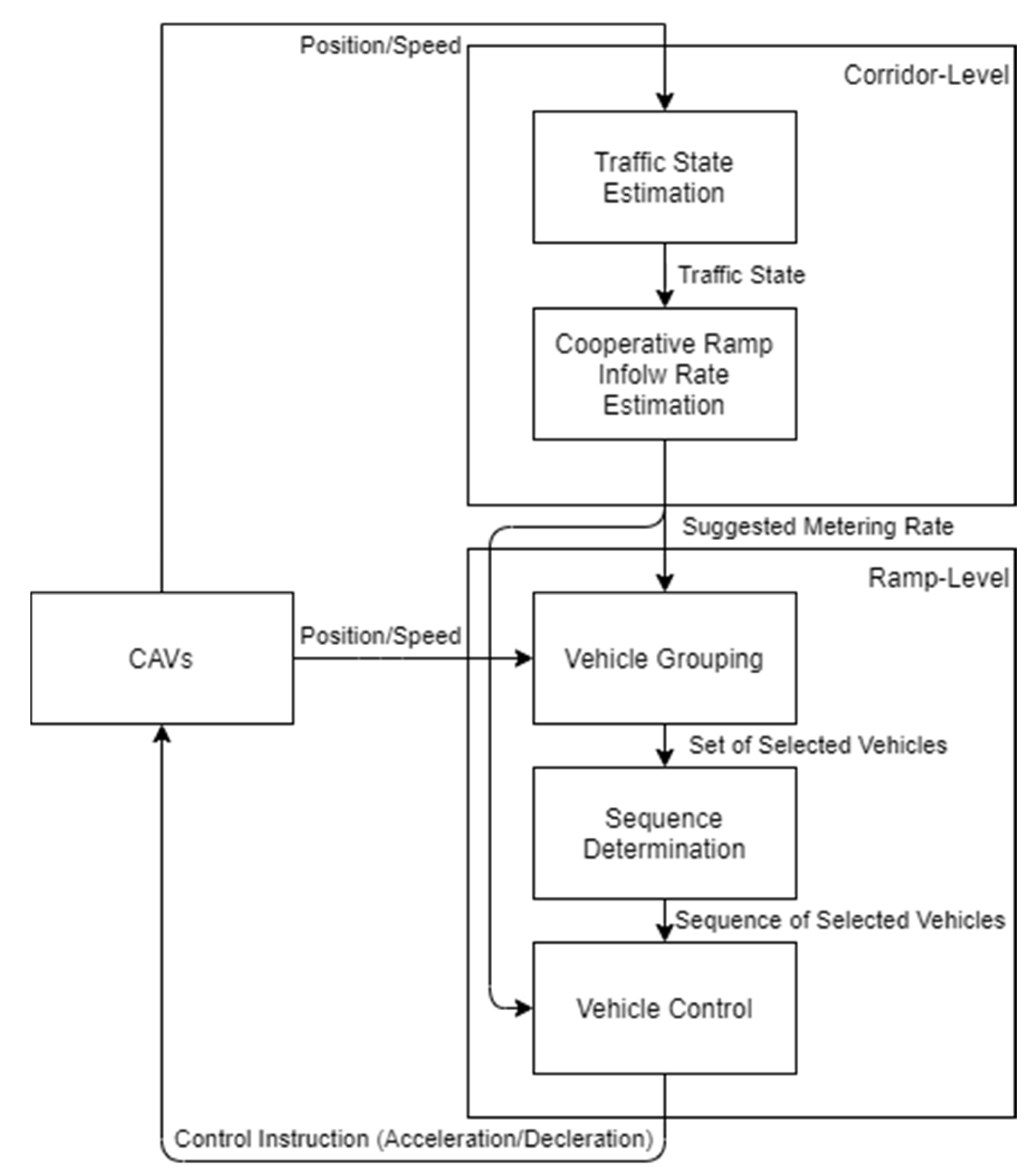
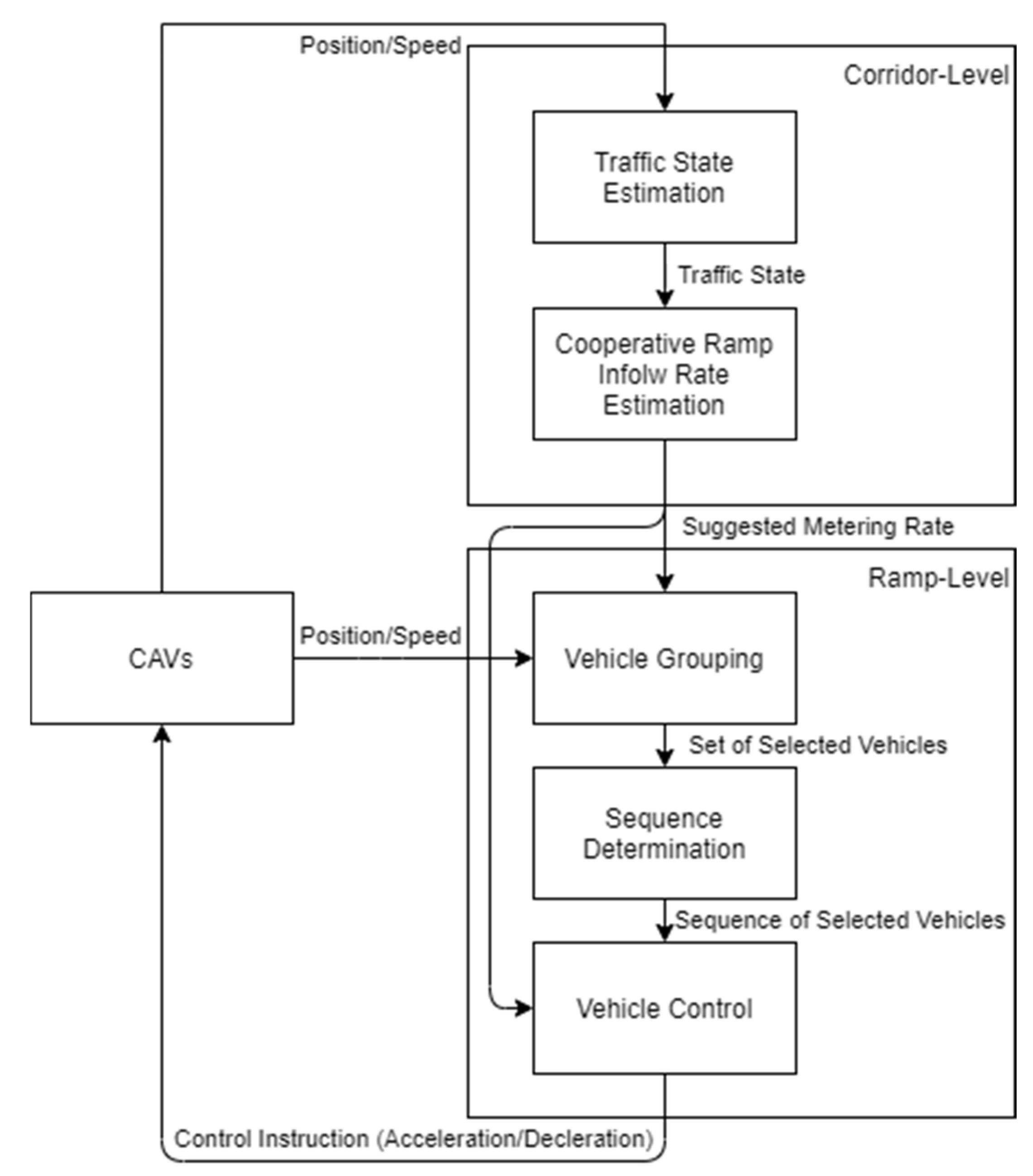
3.2. System Architecture
4. Methodology
4.1. Corridor-Level: Metering Rate Estimation
- The free-flow condition of the mainline traffic should be maintained as much as possible;
- The queue length at the on-ramps should be limited to avoid affecting the traffic on adjacent arterials;
- The traffic condition should be able to recover from congestion (if any) as soon as possible;
- Many existing corridor-wise ramp metering algorithms may take traffic conditions along the freeway into account and calculate coordinated metering rates for multiple ramps simultaneously. In this study, we adopted the Next Generation Stratified Ramp Metering Algorithm proposed by Geroliminis et al. [42] and applied it to the scenario with full CAV penetration. The objective is to balance the ramp waiting time and ramp inflow rate (or the demand and queue lengths at on-ramps) as well as the level of congestion on the mainline to delay the operation of the breakdown and to accelerate system recovery. The zone is defined as a segment of the highway between two consecutive mainline detector locations (in the traditional freeway system). For each section, there is a threat index that denotes the risk of becoming a bottleneck. Based on the indices, a controlled ramp can be determined. Figure 3 depicts the flow chart to identify the controlled ramp.
4.2. Ramp-Level: Movement Control and Rate Regulation
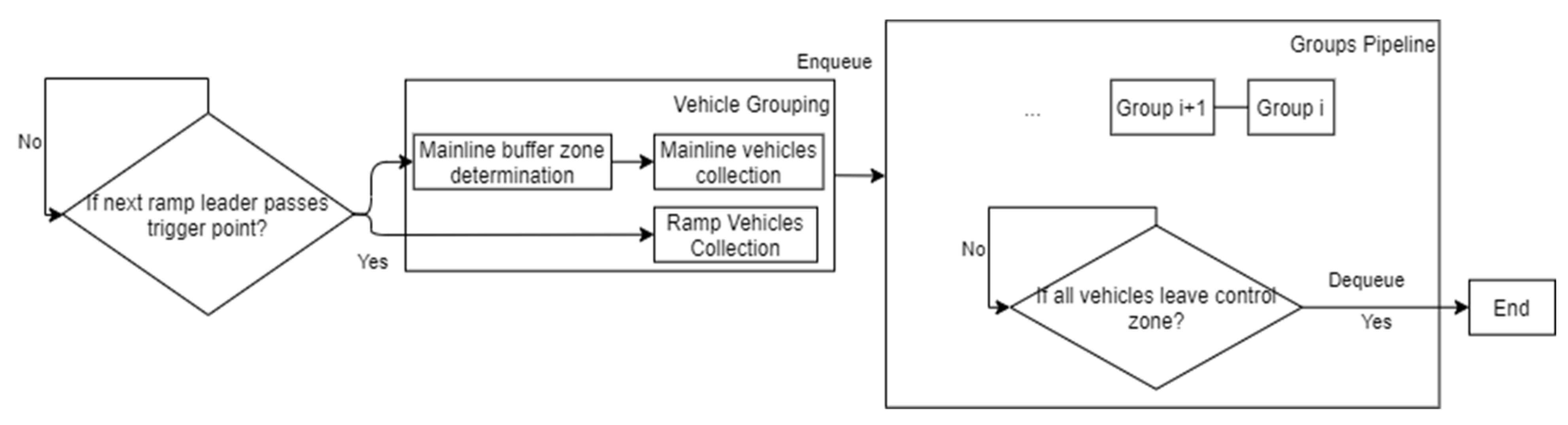
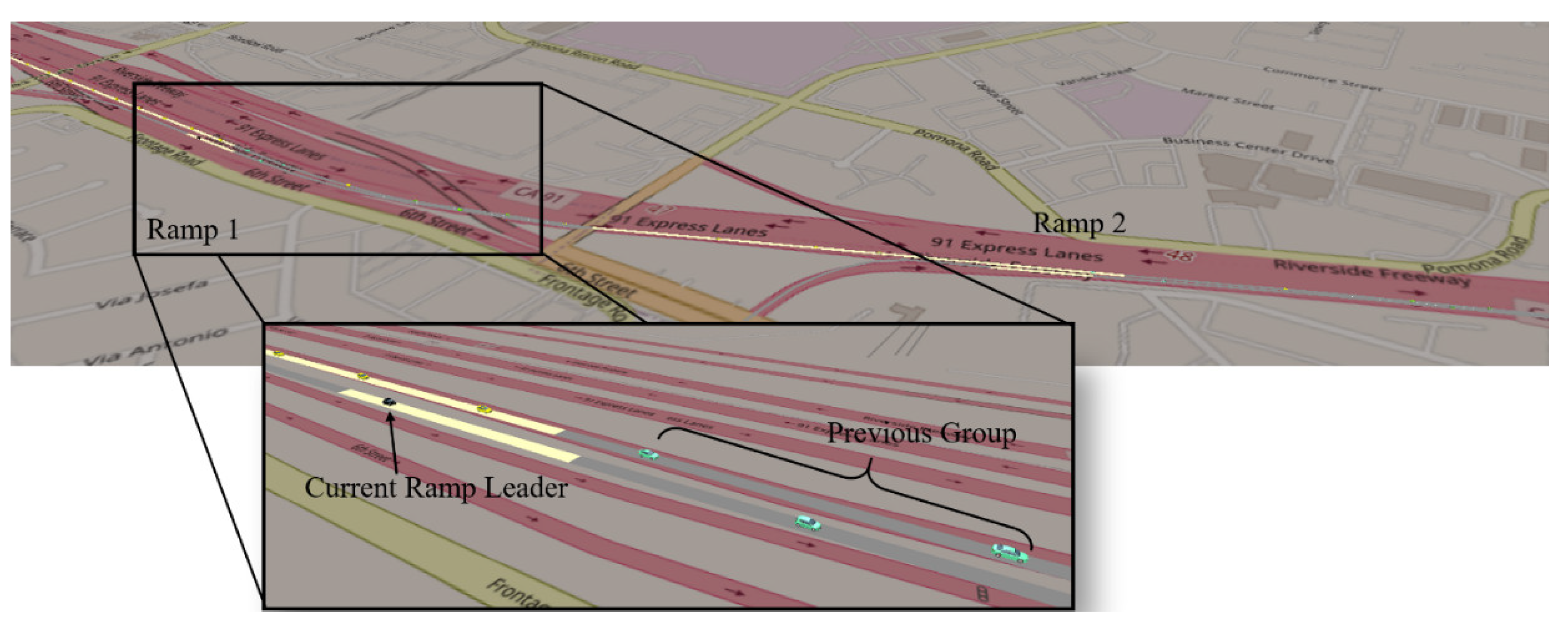
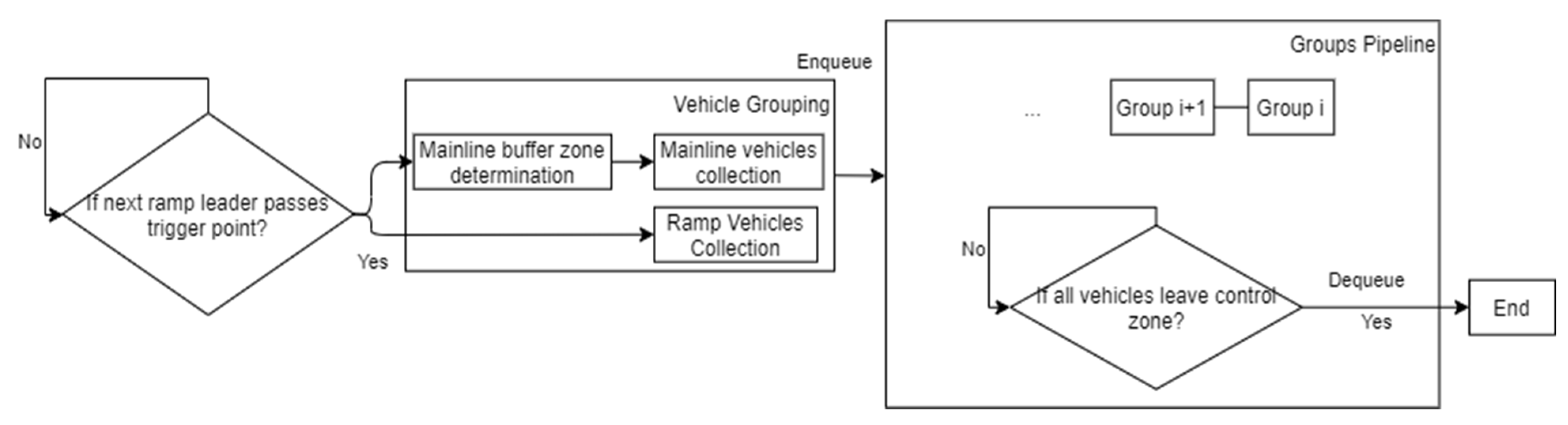
4.2.1. Vehicle Grouping
4.2.2. Optimal Sequence Determination
- Feasible sequence generation: In this step, all of the possible entrance sequences of the CAVs in a group are first generated. As we assume that the vehicles in the same lane cannot overtake the preceding vehicles, the number of all of the feasible sequences equals to where is the permutation operation, and m is the number of mainline vehicles.
- Linear quadratic tracking: The LQ tracking algorithm is applied to solve the optimization problem (Equation (3)). Different merging sequences correspond to different initial states of the system. Using the finite-horizon linear quadratic tracking algorithm, we are able to calculate the control inputs and the specific trajectories of the vehicles for each possible sequence. The Q and R are the weight matrices of the objective function. By tuning these two matrices, the convergence speed of observations and the control effort can be balanced. The control input can be obtained by solving the algebraic Riccati equation [44]:where N is the predefined finite horizon; i is the discrete-time index for each iteration; is the feedback gain; and is the feed-forward gain. , and can be found iteratively backward in time. The control input is then given by . Therefore, for each possible sequence, the speed profile can be calculated.
- Energy consumption estimation: Based on the calculated speed profile under each possible sequence, the corresponding energy consumption can be estimated for the vehicle with different classifications (such as passenger cars, transit buses, or trucks) and powertrains (e.g., internal combustion engines or electric motors). In the simulation, we assume that all the vehicles are passenger cars and that the road grade is trivial, and we will evaluate the system performance of both gasoline-powered vehicles and electric vehicles. In addition, for gasoline-powered vehicles, we refer to the model proposed by [45]:where and are the model parameters calibrated by different driving conditions and and are the speed and acceleration of the vehicles. Specifically, , , , , , , and .
4.2.3. Longitudinal Speed Control
5. Simulation Study
5.1. Simulation Setup
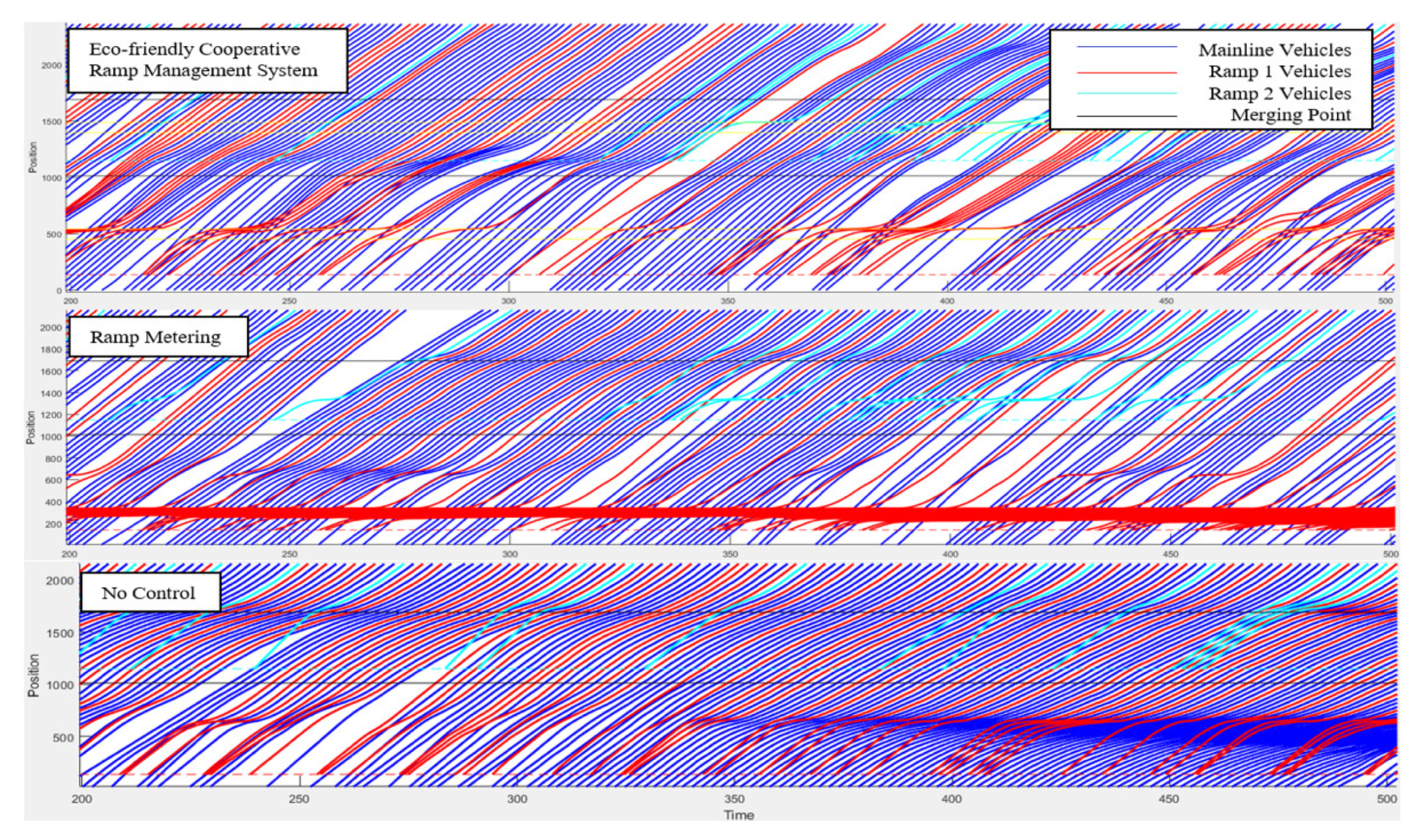
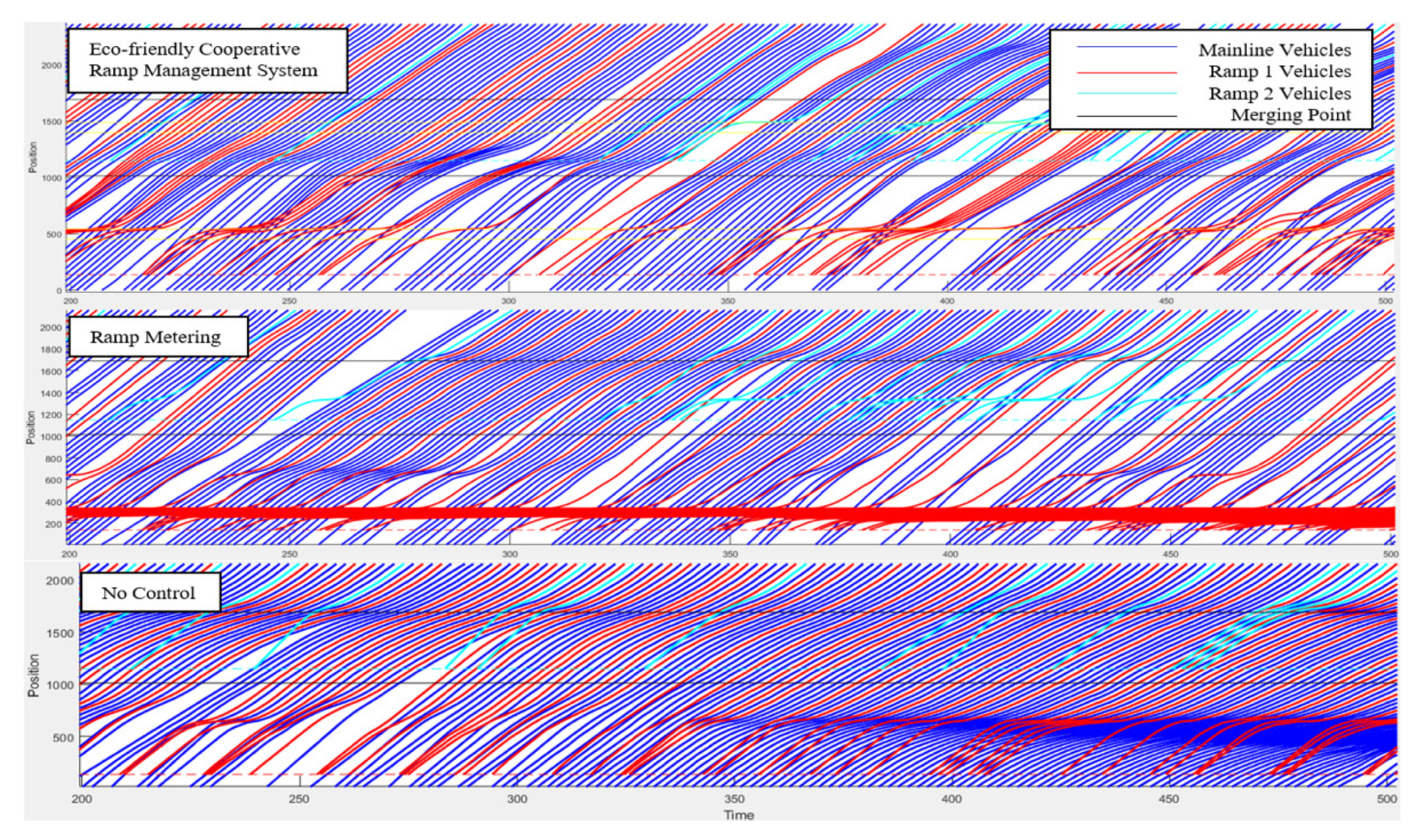
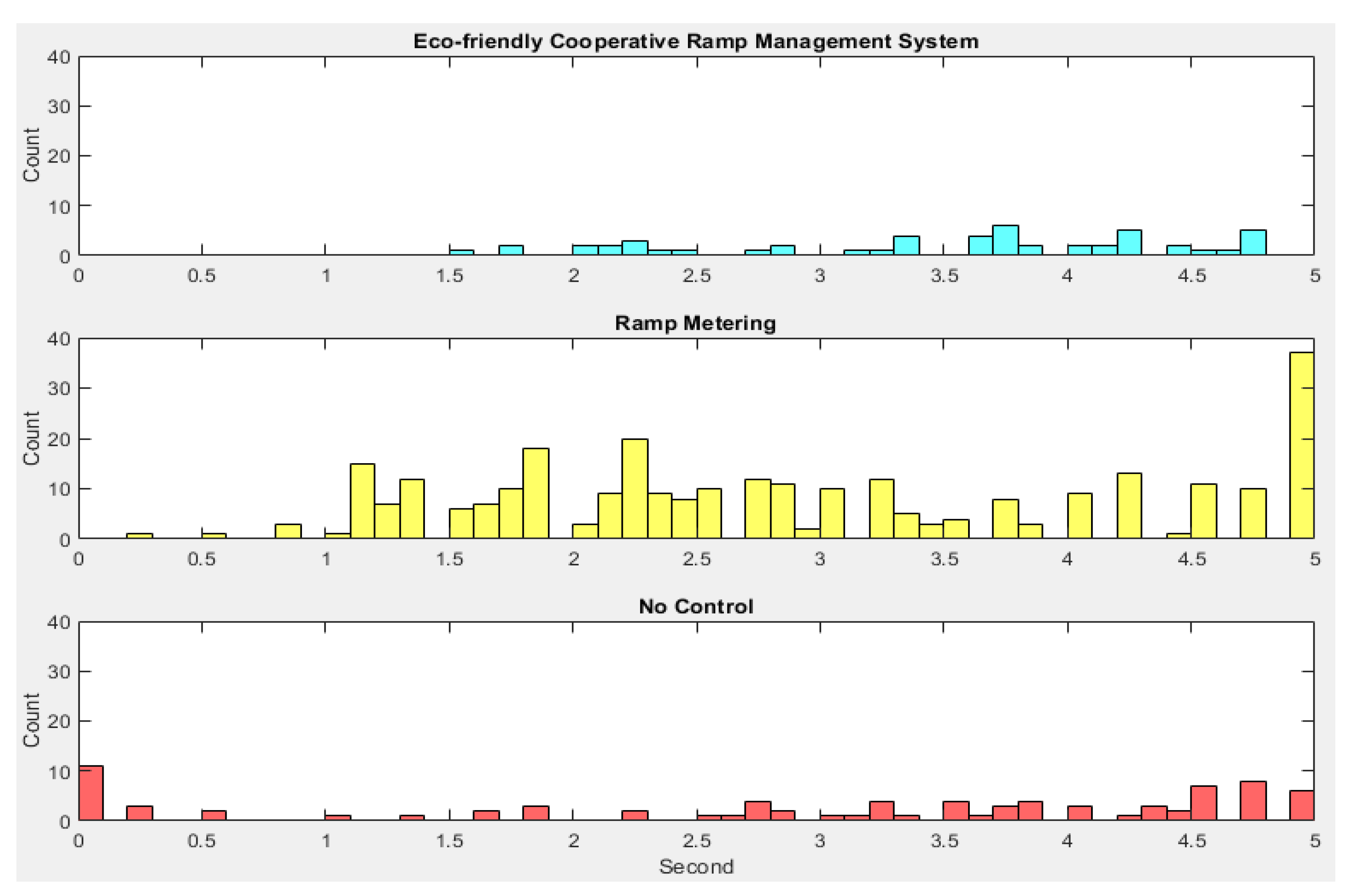
5.2. Results Comparison for Gasoline Vehicles
5.3. Results Comparison for Electric Vehicles
6. Conclusions and Future Work
6.1. Theoretical and Practical Implications
6.2. Limitations and Future Work
- As aforementioned, our current system requires all the traffic participants to be connected and automated vehicles so that they are able to share the current status and execute the designed command. As one of the future steps, the system will be extended to handle more complex and near-term scenarios and mixed traffic, where not only CAVs but also legacy vehicles should be considered;
- Another limitation is the model of communication. To simplify this problem, the current system assumes there is no communication delay. However, in the real world, the delay and package loss may impact both the performance and reliability of the system. Therefore, we plan to simulate the system with a more realistic communication model (e.g., Omnet++) and investigate how the degradation of the communication quality would affect the proposed system. If necessary, solutions to handle the scenarios with low quality communication will be considered.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhao, Z.; Wu, G.; Wang, Z.; Barth, M.J. Optimal Control-Based Eco-Ramp Merging System for Connected and Automated Electric Vehicles. arXiv 2019, arXiv:1910.07620. [Google Scholar]
- Federal Highway Administration. Ramp Metering: A Proven, Effective Strategy. Available online: https://ops.fhwa.dot.gov/publications/fhwahop14021/sec1.htm (accessed on 28 July 2021).
- Zhao, Z.; Wang, Z.; Wu, G.; Ye, F.; Barth, M.J. The state-of-the-art of coordinated ramp control with mixed traffic conditions. In Proceedings of the IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 1741–1748. [Google Scholar]
- PTV VISSIM. PTV Group. Available online: https://www.ptvgroup.com/en/solutions/products/ptv-vissim/ (accessed on 28 July 2021).
- Jacobson, L.N.; Henry, K.C.; Mehyar, O. Real-Time Metering Algorithm for Centralized Control; Transportation Research Board: Washington, DC, USA, 1989. [Google Scholar]
- Paesani, G.; Kerr, J.; Perovich, P.; Khosravi, F.E. System wide adaptive ramp metering (SWARM). In Merging the Transportation and Communications Revolutions; Abstracts for ITS America Seventh Annual Meeting and Exposition: Washington, DC, USA, 1997. [Google Scholar]
- Papageorgiou, M.; Hadj-Salem, H.; Blosseville, J.M. ALINEA: A local feedback control law for on-ramp metering. Transp. Res. Rec. 1991, 1320, 58–67. [Google Scholar]
- Zhang, H.M.; Ritchie, S.G. Freeway ramp metering using artificial neural networks. Transp. Res. Part C Emerg. Technol. 1997, 5, 273–286. [Google Scholar] [CrossRef]
- Lu, C.; Huang, J. A self-learning system for local ramp metering with queue management. Transp. Plan. Technol. 2017, 40, 182–198. [Google Scholar] [CrossRef]
- Schmidt-Dumont, T.; Van Vuuren, J.H. Decentralized reinforcement learning for ramp metering and variable speed limits on highways. IEEE Trans. Intell. Transp. Syst. 2015, 14, 1. [Google Scholar]
- Rios-Torres, J.; Malikopoulos, A.A. A survey on the coordination of connected and automated vehicles at intersections and merging at highway on-ramps. IEEE Trans. Intell. Transp. Syst. 2016, 18, 1066–1077. [Google Scholar] [CrossRef]
- Scarinci, R.; Heydecker, B. Control concepts for facilitating motorway on-ramp merging using intelligent vehicles. Transp. Rev. 2014, 34, 775–797. [Google Scholar] [CrossRef]
- Athans, M. A Unified Approach to the Vehicle-Merging Problem; Transportation Research Board: Washington, DC, USA, 1968; pp. 123–133. [Google Scholar]
- Levine, W.S.; Athans, M. On the optimal error regulation of a string of moving vehicles. IEEE Trans. Autom. Control 1966, 11, 355–361. [Google Scholar] [CrossRef]
- Awal, T.; Kulik, L.; Ramamohanrao, K. Optimal traffic merging strategy for communication-and sensor-enabled vehicles. In Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013), The Hague, The Netherlands, 6–9 October 2013; pp. 1468–1474. [Google Scholar]
- Raravi, G.; Shingde, V.; Ramamritham, K.; Bharadia, J. Merge algorithms for intelligent vehicles. In Next Generation Design and Verification Methodologies for Distributed Embedded Control Systems; Springer: Berlin/Heidelberg, Germany, 2007; pp. 51–65. [Google Scholar]
- Xie, Y.; Zhang, H.; Gartner, N.H.; Arsava, T. Collaborative merging strategy for freeway ramp operations in a connected and autonomous vehicles environment. J. Intell. Transp. Syst. 2017, 21, 136–147. [Google Scholar] [CrossRef]
- Cao, W.; Mukai, M.; Kawabe, T.; Nishira, H.; Fujiki, N. Cooperative vehicle path generation during merging using model predictive control with real-time optimization. Control Eng. Pract. 2015, 34, 98–105. [Google Scholar] [CrossRef]
- Jing, S.; Hui, F.; Zhao, X.; Rios-Torres, J.; Khattak, A.J. Cooperative game approach to optimal merging sequence and on-ramp merging control of connected and automated vehicles. IEEE Trans. Intell. Transp. Syst. 2019, 20, 4234–4244. [Google Scholar] [CrossRef]
- Rios-Torres, J.; Malikopoulos, A.A. Automated and cooperative vehicle merging at highway on-ramps. IEEE Trans. Intell. Transp. Syst. 2016, 18, 780–789. [Google Scholar] [CrossRef]
- Zhou, Y.; Chung, E.; Bhaskar, A.; Cholette, M.E. A state-constrained optimal control based trajectory planning strategy for cooperative freeway mainline facilitating and on-ramp merging maneuvers under congested traffic. Transp. Res. Part C Emerg. Technol. 2019, 109, 321–342. [Google Scholar] [CrossRef]
- Zhou, Y.; Cholette, M.E.; Bhaskar, A.; Chung, E. Optimal vehicle trajectory planning with control constraints and recursive implementation for automated on-ramp merging. IEEE Trans. Intell. Transp. Syst. 2018, 20, 3409–3420. [Google Scholar] [CrossRef]
- Schmidt, G.K.; Posch, B. A two-layer control scheme for merging of automated vehicles. In Proceedings of the 22nd IEEE Conference on Decision and Control, San Antonio, TX, USA, 14–16 December 1983; pp. 495–500. [Google Scholar]
- Ran, B.; Leight, S.; Chang, B. A microscopic simulation model for merging control on a dedicated-lane automated highway system. Transp. Res. Part C Emerg. Technol. 1999, 7, 369–388. [Google Scholar] [CrossRef]
- Ding, J.; Li, L.; Peng, H.; Zhang, Y. A rule-based cooperative merging strategy for connected and automated vehicles. IEEE Trans. Intell. Transp. Syst. 2019, 21, 3436–3446. [Google Scholar] [CrossRef]
- Uno, A.; Sakaguchi, T.; Tsugawa, S. A merging control algorithm based on inter-vehicle communication. In Proceedings of the 199 IEEE/IEEJ/JSAI International Conference on Intelligent Transportation Systems (Cat. No. 99TH8383), Tokyo, Japan, 5–8 October 1999; pp. 783–787. [Google Scholar]
- Lu, X.Y.; Hedrick, J.K. Longitudinal control algorithm for automated vehicle merging. Int. J. Control 2003, 76, 193–202. [Google Scholar] [CrossRef]
- Chou, F.C.; Shladover, S.E.; Bansal, G. Coordinated merge control based on V2V communication. In Proceedings of the 2016 IEEE Vehicular Networking Conference (VNC), Columbus, OH, USA, 8–10 December 2016; pp. 1–8. [Google Scholar]
- Wang, Z.; Wu, G.; Barth, M.J. Distributed consensus-based cooperative highway on-ramp merging using V2X communications. In Proceedings of the WCX World Congress Experience, Detroit, MI, USA, 10–12 April 2018. [Google Scholar]
- Huang, Z.; Zhuang, W.; Yin, G.; Xu, L.; Luo, K. Cooperative Merging for Multiple Connected and Automated Vehicles at Highway On-Ramps via Virtual Platoon Formation. In Proceedings of the 2019 Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019; pp. 6709–6714. [Google Scholar]
- Wang, Z.; Wu, G.; Boriboonsomsin, K.; Barth, M.J.; Han, K.; Kim, B.; Tiwari, P. Cooperative ramp merging system: Agent-based modeling and simulation using game engine. SAE Int. J. Connect. Autom. Veh. 2019, 2, 115–128. [Google Scholar] [CrossRef]
- Liao, X.; Zhao, X.; Wu, G.; Barth, M.J.; Wang, Z.; Han, K.; Tiwari, P. A game theory based ramp merging strategy for connected and automated vehicles in the mixed traffic: A unity-sumo integrated platform. arXiv 2021, arXiv:2101.11237. [Google Scholar]
- Milanés, V.; Godoy, J.; Villagrá, J.; Pérez, J. Automated on-ramp merging system for congested traffic situations. IEEE Trans. Intell. Transp. Syst. 2010, 12, 500–508. [Google Scholar] [CrossRef] [Green Version]
- Liao, X.; Wang, Z.; Zhao, X.; Han, K.; Tiwari, P.; Barth, M.; Wu, G. Cooperative ramp merging design and field implementation: A digital twin approach based on vehicle-to-cloud communication. In IEEE Transactions on Intelligent Transportation Systems; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar]
- Raboy, K.; Ma, J.; Stark, J.; Zhou, F.; Rush, K.; Leslie, E. Cooperative Control for Lane Change Maneuvers with Connected Automated Vehicles: A Field Experiment. In Proceedings of the Transportation Research Board 96th Annual Meeting, Washington, DC, USA, 8–12 January 2017. [Google Scholar]
- Hussain, S.; Peng, Z.; Hayee, M.I. Development and Demonstration of Merge Assist System Using Connected Vehicle Technology; Center for Transportation Studies, University of Minnesota: Minneapolis, MN, USA, 2019. [Google Scholar]
- Ahmed, M.S.; Hoque, M.A.; Rios-Torres, J.; Khattak, A. Freeway merge assistance system using dsrc. In Proceedings of the 2nd ACM International Workshop on Smart, Autonomous, and Connected Vehicular Systems and Services, Snowbird, UT, USA, 20 October 2017; Association for Computing Machinery: New York, NY, USA, 2017; pp. 83–84. [Google Scholar]
- Ahmed, M.S.; Hoque, M.A.; Rios-Torres, J.; Khattak, A. A cooperative freeway merge assistance system using connected vehicles. arXiv 2018, arXiv:1805.00508. [Google Scholar]
- Sanchez-Mateo, S.; Perez-Moreno, E.; Jimenez, F.; Serradilla, F.; Ruiz, A.C.; Tamayo, S.D.L.F. Validation of an assistance system for merging maneuvers in highways in real driving conditions. In Proceedings of the 16th European Automotive Congress (EAEC), MINSK, Belarus, 7–11 October 2019. [Google Scholar]
- Sun, Z.; Huang, T.; Zhang, P. Cooperative decision-making for mixed traffic: A ramp merging example. Transp. Res. Part C Emerg. Technol. 2020, 120, 102764. [Google Scholar] [CrossRef]
- Rios-Torres, J.; Malikopoulos, A.A. Impact of partial penetrations of connected and automated vehicles on fuel consumption and traffic flow. IEEE Trans. Intell. Veh. 2018, 3, 453–462. [Google Scholar] [CrossRef]
- Geroliminis, N.; Srivastava, A.; Michalopoulos, P. Development of the Next Generation Stratified Ramp Metering Algorithm Based on Freeway Density; Center for Transportation Studies: Minneapolis, MN, USA, 2011. [Google Scholar]
- Yao, Z.; Xu, T.; Jiang, Y.; Hu, R. Linear stability analysis of heterogeneous traffic flow considering degradations of connected automated vehicles and reaction time. Phys. A Stat. Mech. Appl. 2021, 561, 125218. [Google Scholar] [CrossRef]
- Bemporad, A.; Morari, M.; Dua, V.; Pistikopoulos, E.N. The explicit linear quadratic regulator for constrained systems. Automatica 2002, 38, 3–20. [Google Scholar] [CrossRef]
- Kamal, M.A.; Mukai, M.; Murata, J.; Kawabe, T. Ecological vehicle control on roads with up-down slopes. IEEE Trans. Intell. Transp. Syst. 2011, 12, 783–794. [Google Scholar] [CrossRef]
- Ye, F.; Wu, G.; Boriboonsomsin, K.; Barth, M.J. A hybrid approach to estimating electric vehicle energy consumption for ecodriving applications. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 719–724. [Google Scholar]
- Kesting, A.; Treiber, M.; Helbing, D. Enhanced intelligent driver model to access the impact of driving strategies on traffic capacity. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2010, 368, 4585–4605. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jin, Q.; Wu, G.; Boriboonsomsin, K.; Barth, M.J. Power-based optimal longitudinal control for a connected eco-driving system. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2900–2910. [Google Scholar] [CrossRef]
- Lu, Z.; Fu, T.; Fu, L.; Shiravi, S.; Jiang, C. A video-based approach to calibrating car-following parameters in VISSIM for urban traffic. Int. J. Transp. Sci. Technol. 2016, 5, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Gettman, D.; Pu, L.; Sayed, T.; Shelby, S. Surrogate Safety Assessment Model and Validation: Final Report; Federal Highway Administration, Office of Safety Research and Development: McLean, VA, USA, 2008.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Condition | Index = 0, downstream not controlled ramp | Index = 0/1, downstream controlled ramp | Index = 1, downstream not controlled ramp | Index = 2 |
| Type | Uncongested Ramp Metering | Controlled Ramp Metering | Controlled Ramp Metering | Congested Ramp Metering |
| Suggested Ramp Inflow Rate | otherwise |
| Mobility (mph) | Energy (mpg) the Bigger the Better | ||
|---|---|---|---|
| Eco-friendly Cooperative Ramp Management System | Overall | 59.10 (48.6%) (79.4%) | 44.40 (35.1%) (0.8%) |
| Mainline | 62.17 (−4.9%) (107.3%) | 41.45 (10.0%) (−4.0%) | |
| Ramp 1 | 53.14 (210.0%) (−7.7%) | 51.75 (119.2%) (8.4%) | |
| Ramp 2 | 50.60 (−2.7%) (14.9%) | 65.12 (112.1%) (56.0%) | |
| Ramp Metering | Overall | 39.76 | 32.87 |
| Mainline | 65.40 | 37.67 | |
| Ramp 1 | 17.14 | 23.61 | |
| Ramp 2 | 52.03 | 30.70 | |
| No Control | Overall | 32.95 | 44.05 |
| Mainline | 29.98 | 43.19 | |
| Ramp 1 | 57.55 | 47.73 | |
| Ramp 2 | 44.05 | 41.74 | |
| Mobility (mph) | Energy (kWatt/100 mile) the Smaller the Better | ||
|---|---|---|---|
| Optimal Control | Overall | 62.31 (56.7%) (89.1%) | 40.91 (−24.0%) (−2.5%) |
| Mainline | 65.28 (−1.8%) (117.7%) | 44.15 (−7.6%) (3.5%) | |
| Ramp 1 | 57.14 (233.4%) (−0.7%) | 33.75 (−54.2%) (−13.0%) | |
| Ramp 2 | 54.03 (3.8%) (22.7%) | 29.04 (−44.9%) (−37.3%) | |
| Ramp Metering | Overall | 39.76 | 53.84 |
| Mainline | 65.40 | 47.76 | |
| Ramp 1 | 17.14 | 73.68 | |
| Ramp 2 | 52.03 | 52.72 | |
| No Control | Overall | 32.95 | 41.98 |
| Mainline | 29.98 | 42.64 | |
| Ramp 1 | 57.55 | 38.80 | |
| Ramp 2 | 44.05 | 46.33 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Z.; Wu, G.; Barth, M. Corridor-Wise Eco-Friendly Cooperative Ramp Management System for Connected and Automated Vehicles. Sustainability 2021, 13, 8557. https://doi.org/10.3390/su13158557
Zhao Z, Wu G, Barth M. Corridor-Wise Eco-Friendly Cooperative Ramp Management System for Connected and Automated Vehicles. Sustainability. 2021; 13(15):8557. https://doi.org/10.3390/su13158557
Chicago/Turabian StyleZhao, Zhouqiao, Guoyuan Wu, and Matthew Barth. 2021. "Corridor-Wise Eco-Friendly Cooperative Ramp Management System for Connected and Automated Vehicles" Sustainability 13, no. 15: 8557. https://doi.org/10.3390/su13158557
APA StyleZhao, Z., Wu, G., & Barth, M. (2021). Corridor-Wise Eco-Friendly Cooperative Ramp Management System for Connected and Automated Vehicles. Sustainability, 13(15), 8557. https://doi.org/10.3390/su13158557