
Design of Capacitive Bridge Fault Current Limiter for Low-Voltage Ride-Through Capacity Enrichment of Doubly Fed Induction Generator-Based Wind Farm


 ,
,  and
and 
Abstract
1. Introduction
2. DFIG Farm Model
2.1. Turbine Model
2.2. DFIG Model
2.3. DFIG Control
2.4. Control of Pitch Angle
3. CBFCL Operation and Design
3.1. Normal Operating Mode
3.2. Fault Operating Mode
3.3. Recovery Mode
3.4. Ld, Rsh, Csh Design
4. Simulation Results
- Circumstance A: without FCL.
- Circumstance B: with IBFCL.
- Circumstance C: with CBFCL.
- Circumstance D: with CBFCL using Fuzzy controller in drive train.
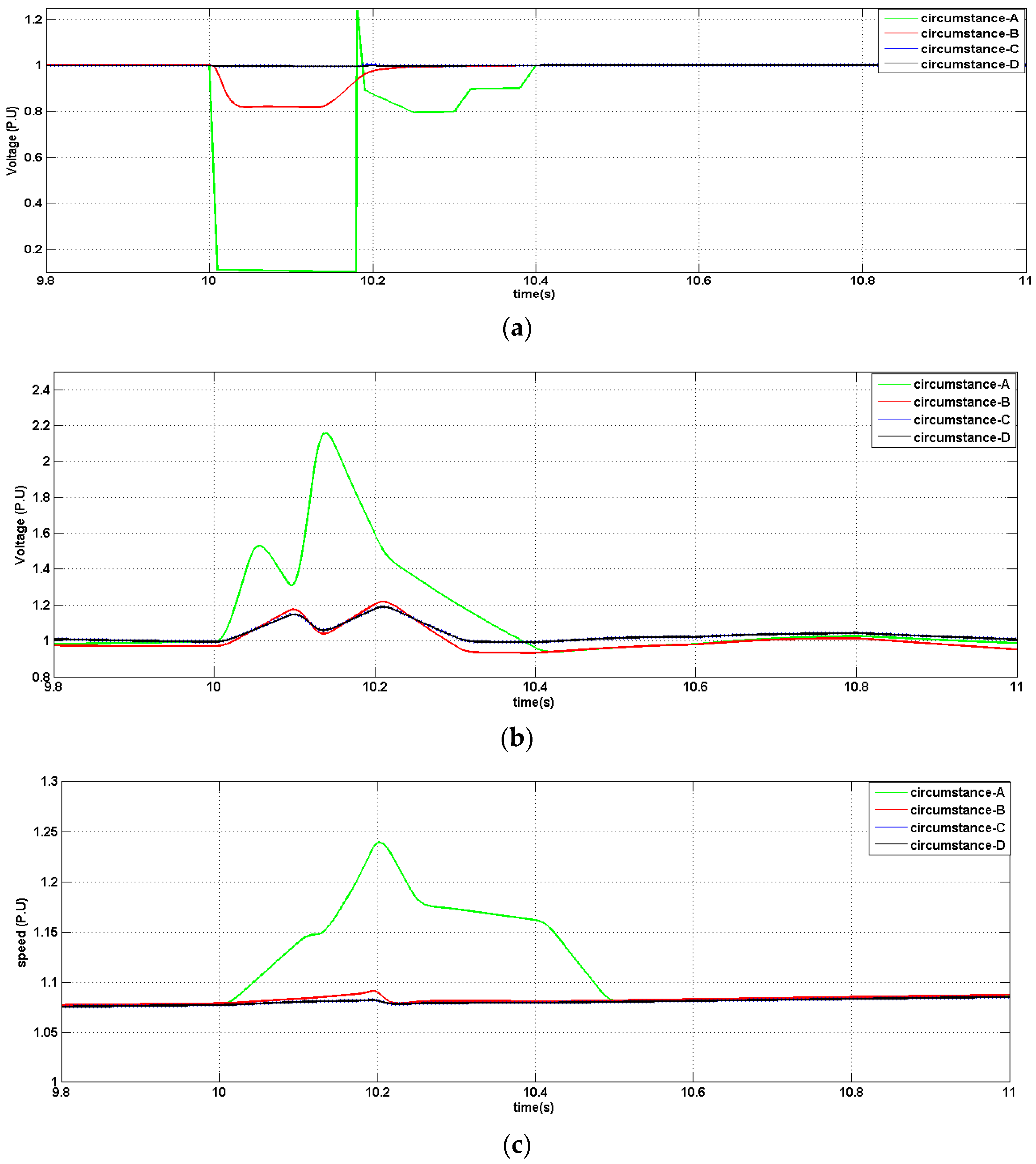
4.1. Variation of PCC Voltage, DC Link Voltage, Rotor Speed with Time
4.2. Variation of Rotor Current with Time for Different Circumstances
4.3. Variation of Reactive Power, Reactive Power Flow in Line, Active Power with Time
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| FCL | fault current limiter |
| IBFCL | inductive bridge fault current limiter |
| CBFCL | capacitive bridge fault current limiter |
| DFIG | doubly fed induction generator |
| FRT | fault ride through |
| RSC | rotor side converter |
| GSC | grid side converter |
| LVRT | low voltage ride through |
| STATCOM | static synchronous compensator |
| WF | wind farm |
| SDBR | series dynamic breaking resistor |
| PCC | point of common coupling |
| DVR | dynamic voltage restorer |
| UPIC | unified power inline controller |
| IGBT | insulated gate bipolar thyristor |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specifications of DFIG | Specifications of CBFCL and Grid | ||||||
|---|---|---|---|---|---|---|---|
| Nominal power | 2 MVA | Nominal voltage | 66 KV | ||||
| Nominal voltage | 690 V | Nominal frequency | 50 hz | ||||
| Xls | 0.1022 pu | Transformer ratio | 690/66 KV | ||||
| Xlr | 0.1123 pu | Resistance(R) | 1.5 ohm | ||||
| Rs | 0.0074 pu | Reactance (X) | 3.4 ohm | ||||
| Rr | 0.0061 pu | Rsh | 10 ohm | ||||
| H | 3 s | Csh | 50 microF | ||||
| Xm | 4.6321 pu | LD | 0.01 H | ||||
| RSC of DFIG | GSC of DFIG | ||||||
| Kp1 | 0.25 | Ki1 | 25 | Kp1 | 0.25 | Ki1 | 50 |
| Kp2 | 1.3 | Ki2 | 100 | Kp2 | 0.25 | Ki2 | 120 |
| Kp3 | 0.5 | Ki3 | 10 | Kp3 | 0.75 | Ki3 | 100 |
| Kp4 | 0.12 | Ki4 | 125 | Kp4 | 0.5 | Ki4 | 150 |
References
- IRENA. Global Renewables Outlook: Energy Transformation 2050. 2020. Available online: https://www.irena.org/publications/2020/Apr/Global-Renewables-Outlook-2020 (accessed on 25 March 2021).
- IRENA. Global Energy Transformation: A Roadmap to 2050. 2019. Available online: https://www.irena.org/publications/2019/Apr/Global-energy-transformation-A-roadmap-to-2050-2019Edition (accessed on 25 March 2021).
- Alegria, I.M.; Andreu, J.; Martin, J.L.; Ibanez, P.; Villate, J.L.; Camblong, H. Connection requirements for wind farms: A survey on technical requirements and regulation. Renew. Sustain. Energy Rev. 2007, 11, 1858–1872. [Google Scholar] [CrossRef]
- Tande, J.O.G. Exploitation of wind-energy resources in proximity to weak electric grids. Appl. Energy 2000, 65, 395–401. [Google Scholar] [CrossRef]
- Ellabban, O.; Abu-Rub, H.; Blaabjerg, F. Renewable energy resources: Current status, future prospects and their enabling technology. Renew. Sustain. Energy Rev. 2014, 39, 748–764. [Google Scholar] [CrossRef]
- Marugán, A.P.; Márquez, F.P.G.; Lev, B. Optimal decision-making via binary decision diagrams for investments under a risky environment. Int. J. Prod. Res. 2017, 55, 5271–5286. [Google Scholar] [CrossRef]
- Yuan, X. Overview of problems in large-scale wind turbines. J. Mod. Power Syst. Clean Energy Springer 2013, 1, 22–25. [Google Scholar] [CrossRef]
- Smith, J.C.; Milligan, M.R.; de Meo, E.A.; Parsons, B. Utility wind integration and operating impact state of the art. IEEE Trans. Power Syst. 2007, 22, 900–908. [Google Scholar] [CrossRef]
- Shi, L.; Dai, S.; Ni, Y.; Yao, L.; Bazargan, M. Transient stability of power systems with high penetration of DFIG based wind farms. Power Energy Soc. Gen. Meet. 2009, 1–6. [Google Scholar] [CrossRef]
- Qiao, W.; Harley, R.G. Effect of grid-connected DFIG wind turbines on power system transient stability. Power Energy Soc. Gen. Meet. 2008, 1–7. [Google Scholar] [CrossRef]
- Hossain, M.I.; Abido, M.A. SCIG Based Wind Energy Integrated Multiterminal MMC-HVDC Transmission Network. Sustainability 2020, 12, 3622. [Google Scholar] [CrossRef]
- Yousefi-Talouki, A.; Zalzar, S.; Pouresmaeil, E. Direct Power Control of Matrix Converter-Fed DFIG with Fixed Switching Frequency. Sustainability 2019, 11, 2604. [Google Scholar] [CrossRef]
- Li, M.; Wang, Y. Research on Frequency Fuzzy Adaptive Additional Inertial Control Strategy for D-PMSG Wind Turbine. Sustainability 2019, 11, 4241. [Google Scholar] [CrossRef]
- Eltamaly, A.M.; Al-Saud, M.; Sayed, K.; Abo-Khalil, A.G. Sensorless Active and Reactive Control for DFIG Wind Turbines Using Opposition-Based Learning Technique. Sustainability 2020, 12, 3583. [Google Scholar] [CrossRef]
- Abo-Khalil, A.G.; Eltamaly, A.M.; Praveen, P.R.; Alghamdi, A.S.; Tlili, I. A Sensorless Wind Speed and Rotor Position Control of PMSG in Wind Power Generation Systems. Sustainability 2020, 12, 8481. [Google Scholar] [CrossRef]
- Jalilian, A.; Naderi, S.B.; Negnevitsky, M.; Hagh, M.T.; Muttaqi, K. Controllable DC-link fault current limiter augmentation with DC chopper to improve fault ride-through of DFIG. IET Renew. Power Gener. 2017, 11, 313–324. [Google Scholar] [CrossRef]
- Qiao, W.; Venayagamoorthy, G.K.; Harley, R.G. Real-Time Implementation of a STATCOM on a Wind Farm Equipped with Doubly Fed Induction Generators. IEEE Trans. Ind. Appl. 2009, 45, 98–107. [Google Scholar] [CrossRef]
- Márquez, F.P.G.; Marugán, A.P.; Pérez, J.M.P.; Hillmansen, S.; Papaelias, M. Optimal Dynamic Analysis of Electrical/Electronic Components in Wind Turbines. Energies 2017, 10, 1111. [Google Scholar] [CrossRef]
- Márquez, F.P.G.; Ramírez, I.S.; Mohammadi-Ivatloo, B.; Marugán, A.P. Reliability Dynamic Analysis by Fault Trees and Binary Decision Diagrams. Information 2020, 11, 324. [Google Scholar] [CrossRef]
- Zhou, L.; Liu, J.; Zhou, S. Improved demagnetization control of a doubly-fed induction generator under balanced grid fault. IEEE Trans. Power Electron. 2015, 30, 6695–6705. [Google Scholar] [CrossRef]
- Hu, S.; Lin, X.; Kang, Y.; Zou, X. An improved low-voltage ride-through control strategy of doubly fed induction generator during grid faults. IEEE Trans. Power Electron. 2011, 26, 3653–3665. [Google Scholar] [CrossRef]
- Liu, S.; Bi, T.; Liu, Y. Theoretical Analysis on the Short-Circuit Current of Inverter-Interfaced Renewable Energy Generators with Fault-Ride-through Capability. Sustainability 2018, 10, 44. [Google Scholar] [CrossRef]
- Alam, M.S.; Abido, M.A.Y.; Hussein, A.E.-D.; El-Amin, I. Fault Ride through Capability Augmentation of a DFIG-Based Wind Integrated VSC-HVDC System with Non-Superconducting Fault Current Limiter. Sustainability 2019, 11, 1232. [Google Scholar] [CrossRef]
- Choi, N.; Park, B.; Cho, H.; Lee, B. Impact of Momentary Cessation Voltage Level in Inverter-Based Resources on Increasing the Short Circuit Current. Sustainability 2019, 11, 1153. [Google Scholar] [CrossRef]
- Shuai, X.; Yang, G.; Zhou, H.; Geng, H. An LVRT control strategy based on flux linkage tracking for DFIG-based WECS. IEEE Trans. Ind. Electron. 2013, 60, 2820–2832. [Google Scholar]
- Morshed, M.J.; Fekih, A. A new fault ride-through control for DFIG-based wind energy systems. Electr. Power Syst. Res. 2017, 146, 258–269. [Google Scholar] [CrossRef]
- Liu, X.; Han, Y.; Ch, W. Second-order sliding mode control for power optimisation of DFIG-based variable speed wind turbine. IET Renew. Power Gener. 2017, 11, 408–418. [Google Scholar] [CrossRef]
- Mohammadi, J.; Afsharnia, S.; Vaez-Zadeh, S.; Farhangi, S. Improved fault ride through strategy for doubly fed induction generator based wind turbines under both symmetrical and asymmetrical grid faults. IET Renew. Power Gener. 2016, 10, 1114–1122. [Google Scholar] [CrossRef]
- Pannell, G.; Atkinson, D.J.; Zahawi, B. Minimum-Threshold Crowbar for a Fault-Ride-Through Grid-Code-Compliant DFIG Wind Turbine. IEEE Trans. Energy Convers. 2010, 25, 750–759. [Google Scholar] [CrossRef]
- Marugán, A.P.; Márquez, F.P.G. Advanced analytics for detection and diagnosis of false alarms and faults: A real case study. Wind Energy 2019, 22, 1622–1635. [Google Scholar] [CrossRef]
- Gounder, Y.K.; Nanjundappan, D.; Boominathan, V. Enhancement of transient stability of distribution system with SCIG and DFIG based wind farms using STATCOM. IET Renew. Power Gener. 2016, 10, 1171–1180. [Google Scholar] [CrossRef]
- Tsili, M.; Papathanassiou, S. A Review of Grid Code Technical Requirements for Wind Farms. IET Renew. Power Gener. 2009, 3, 308–332. [Google Scholar] [CrossRef]
- Pannell, G.; Zahawi, B.; Atkinson, D.J.; Missailidis, P. Evaluation of the Performance of a DC-Link Brake Chopper as a DFIG Low-Voltage Fault-Ride-through Device. IEEE Trans. Energy Convers. 2013, 28, 535–542. [Google Scholar] [CrossRef]
- Huchel, Ł.; Moursi, M.S.E.; Zeineldin, H.H. A Parallel Capacitor Control Strategy for Enhanced FRT Capability of DFIG. IEEE Trans. Sustain. Energy 2015, 6, 303–312. [Google Scholar] [CrossRef]
- Okedu, K.E.; Muyeen, S.M.; Takahashi, R.; Tamura, J. Wind Farms Fault Ride through Using DFIG With New Protection Scheme. IEEE Trans. Sustain. Energy 2012, 3, 242–254. [Google Scholar] [CrossRef]
- Firouzi, M.; Gharehpetian, G.B.; Salami, Y. Active and reactive power control of wind farm for enhancement transient stability of multi-machine power system using UIPC. IET Renew. Power Gener. 2017, 11, 1246–1252. [Google Scholar] [CrossRef]
- Wessels, C.; Gebhardt, F.; Fuchs, F.W. Fault ride-through of a DFIG wind turbine using a dynamic voltage restorer during symmetrical and asymmetrical grid faults. IEEE Trans. Power Electron. 2017, 26, 807–815. [Google Scholar] [CrossRef]
- Ibrahim, A.O.; Nguyen, T.H.; Dong-Choon, L.; Su-Chang, L. A fault ride-through technique of DFIG wind turbine systems using dynamic voltage restorers. IEEE Trans. Energy Convers. 2011, 26, 871–882. [Google Scholar] [CrossRef]
- Okedu, K.E.; Muyeen, S.M.; Tamura, R.T.J. Conceptual Design and Evaluation of a Resistive-Type SFCL for Efficient Fault Ride Through in a DFIG. IEEE Trans. Appl. Supercond. 2016, 26. [Google Scholar] [CrossRef]
- Salami, Y.; Firouzi, M. Dynamic performance of wind farms with bridge-type superconducting fault current limiter in distribution grid. In Proceedings of the 2011 2nd International Conference on Electric Power and Energy Conversion Systems (EPECS), Sharjah, United Arab Emirates, 15–17 November 2011. [Google Scholar]
- Rashid, G.; Ali, M.H. Nonlinear Control-Based Modified BFCL for LVRT Capacity Enhancement of DFIG Based Wind Farm. IEEE Trans. Energy Convers. 2016. [Google Scholar] [CrossRef]
- Tapia, G.; Tapia, A.; Ostolaza, J.X. Proportional-integral regulator-based approach to wind farm reactive power management for secondary voltage control. IEEE Trans. Energy Convers. 2007, 22, 488–498. [Google Scholar] [CrossRef]
- Galdi, V.; Piccolo, A.; Siano, P. Exploiting maximum energy from variable speed wind power generation systems by using an adaptive Takagi-Sugeno-Kang fuzzy model. Energy Convers. Manag. 2009, 50, 413–421. [Google Scholar] [CrossRef]
- Calderaro, V.; Galdi, V.; Piccolo, A.; Siano, P. A fuzzy controller for maximum energy extraction from variable speed wind power generation systems. Electr. Power Syst. Res. 2008, 78, 1109–1118. [Google Scholar] [CrossRef]
- Galdi, V.; Piccolo, A.; Siano, P. Designing an adaptive fuzzy controller for maximum wind energy extraction. IEEE Trans. Energy Convers. 2008, 23, 559–569. [Google Scholar] [CrossRef]
- Marugán, A.P.; Márquez, F.P.G.; Lorente, J. Decision making process via binary decision diagram. Int. J. Manag. Sci. Eng. Manag. 2015, 10, 3–8. [Google Scholar] [CrossRef]
- Hua, S.Y.; Allen, T.J. Application of fuzzy logic in power systems. I. General introduction to fuzzy logic. Power Eng. J. 1997, 11, 219–222. [Google Scholar]
- Khezri, R.; Bevrani, H. Fuzzy-based coordinated control design for AVR and PSS in multi-machine power systems. In Proceedings of the 13th Iranian Conference on Fuzzy Systems, Qazvin, Iran, 27–29 August 2013; pp. 1–5. [Google Scholar]
- Chapman, S.J. Electric Machinery and Power System Fundamentals, 1st ed.; McGraw-Hill: New York, NY, USA, 2001. [Google Scholar]
- Bissey, S.; Jacques, S.; le Bunetel, J.-C. The Fuzzy Logic Method to Efficiently Optimize Electricity Consumption in Individual Housing. Energies 2017, 10, 1701. [Google Scholar] [CrossRef]
- Khezri, R.; Bevrani, H. Voltage performance enhancement of DFIG-based wind farms integrated in large-scale power systems: Coordinated AVR and PSS. Int. J. Electr. Power Energy Syst. 2015, 73, 400–410. [Google Scholar] [CrossRef]







| NL | NS | ZR | PS | PL | |
|---|---|---|---|---|---|
| NL | PS | ZR | ZR | NS | NS |
| NS | PL | PS | ZR | ZR | PS |
| ZR | ZR | ZR | NS | ZR | ZR |
| PS | PS | NS | ZR | PS | PS |
| PL | NS | ZR | PS | ZR | NL |
| Time (Sec) | PCC Voltage (Vs) Time | Dc Link Voltage (Vs) Time | Rotor Speed (Vs) Time | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| A | B | C | D | A | B | C | D | A | B | C | D | |
| 10 | 1 | 1 | 1 | 1 | 1 | 0.95 | 1 | 1.07 | 1.075 | 1.075 | 1.075 | 1.075 |
| 10.1 | 0.1 | 0.8 | 0.98 | 0.99 | 1.4 | 1.2 | 1.1 | 1.075 | 1.15 | 1.08 | 1.072 | 1.072 |
| 10.2 | 0.8 | 0.9 | 0.98 | 0.99 | 1.6 | 1.2 | 1.18 | 1.08 | 1.22 | 1.09 | 1.072 | 1.072 |
| 10.3 | 0.8 | 0.95 | 0.99 | 1 | 1.2 | 0.91 | 1.1 | 1.06 | 1.17 | 1.072 | 1.073 | 1.073 |
| 10.4 | 0.9 | 0.95 | 0.99 | 1 | 0.9 | 0.9 | 1 | 1.052 | 1.08 | 1.075 | 1.075 | 1.075 |
| 10.5 | 0.98 | 0.98 | 0.99 | 1 | 0.9 | 0.9 | 1 | 1.03 | 1.075 | 1.075 | 1.075 | 1.075 |
| Time (Sec) | Rotor Current | |||
|---|---|---|---|---|
| A | B | C | D | |
| 10 | 3 | 1.4 | 1.02 | 1.01 |
| 10.1 | 2 | 1.3 | 1.02 | 1.01 |
| 10.2 | 1.5 | 1.2 | 1.01 | 1.01 |
| 10.3 | 1.3 | 1.05 | 1.01 | 1.01 |
| 10.4 | 1.2 | 1 | 1 | 1 |
| 10.5 | 1 | 1 | 1 | 1 |
| Time (Sec) | Wind Farm Reactive Power (Vs) Time | Reactive Power Flow in Line (Vs) Time | Wind Farm Active Power (Vs) Time | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| A | B | C | D | A | B | C | D | A | B | C | D | |
| 10 | 0 | 0 | 0.145 | 0.132 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 |
| 10.1 | 0 | 0 | 0.145 | 0.132 | 0 | −0.5 | 0.5 | 0.35 | 0 | 0.4 | 0.2 | 0.15 |
| 10.2 | −2 | −0.8 | 0 | 0 | −2 | −0.3 | 0.3 | 0.23 | 2 | 1.5 | 1.2 | 1.05 |
| 10.3 | −2.5 | −0.2 | 0 | 0 | −1.7 | −0.1 | 0.2 | 0.15 | 1.6 | 0.8 | 0.6 | 0.5 |
| 10.4 | −2.2 | −0.1 | 0 | 0 | −1.5 | −0.1 | 0 | 0 | 2 | 1.2 | 1.1 | 1.05 |
| 10.5 | −1.5 | −0.1 | 0 | 0 | −1.2 | −0.1 | 0 | 0 | 1.8 | 1.2 | 0.95 | 0.98 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Padmaja, A.; Shanmukh, A.; Mendu, S.S.; Devarapalli, R.; Serrano González, J.; García Márquez, F.P. Design of Capacitive Bridge Fault Current Limiter for Low-Voltage Ride-Through Capacity Enrichment of Doubly Fed Induction Generator-Based Wind Farm. Sustainability 2021, 13, 6656. https://doi.org/10.3390/su13126656
Padmaja A, Shanmukh A, Mendu SS, Devarapalli R, Serrano González J, García Márquez FP. Design of Capacitive Bridge Fault Current Limiter for Low-Voltage Ride-Through Capacity Enrichment of Doubly Fed Induction Generator-Based Wind Farm. Sustainability. 2021; 13(12):6656. https://doi.org/10.3390/su13126656
Chicago/Turabian StylePadmaja, A., Allusivala Shanmukh, Siva Subrahmanyam Mendu, Ramesh Devarapalli, Javier Serrano González, and Fausto Pedro García Márquez. 2021. "Design of Capacitive Bridge Fault Current Limiter for Low-Voltage Ride-Through Capacity Enrichment of Doubly Fed Induction Generator-Based Wind Farm" Sustainability 13, no. 12: 6656. https://doi.org/10.3390/su13126656
APA StylePadmaja, A., Shanmukh, A., Mendu, S. S., Devarapalli, R., Serrano González, J., & García Márquez, F. P. (2021). Design of Capacitive Bridge Fault Current Limiter for Low-Voltage Ride-Through Capacity Enrichment of Doubly Fed Induction Generator-Based Wind Farm. Sustainability, 13(12), 6656. https://doi.org/10.3390/su13126656