Spatio-Semantic Road Space Modeling for Vehicle–Pedestrian Simulation to Test Automated Driving Systems


Abstract
1. Introduction
1.1. Research Questions and Hypothesis
1.2. Organization of the Paper
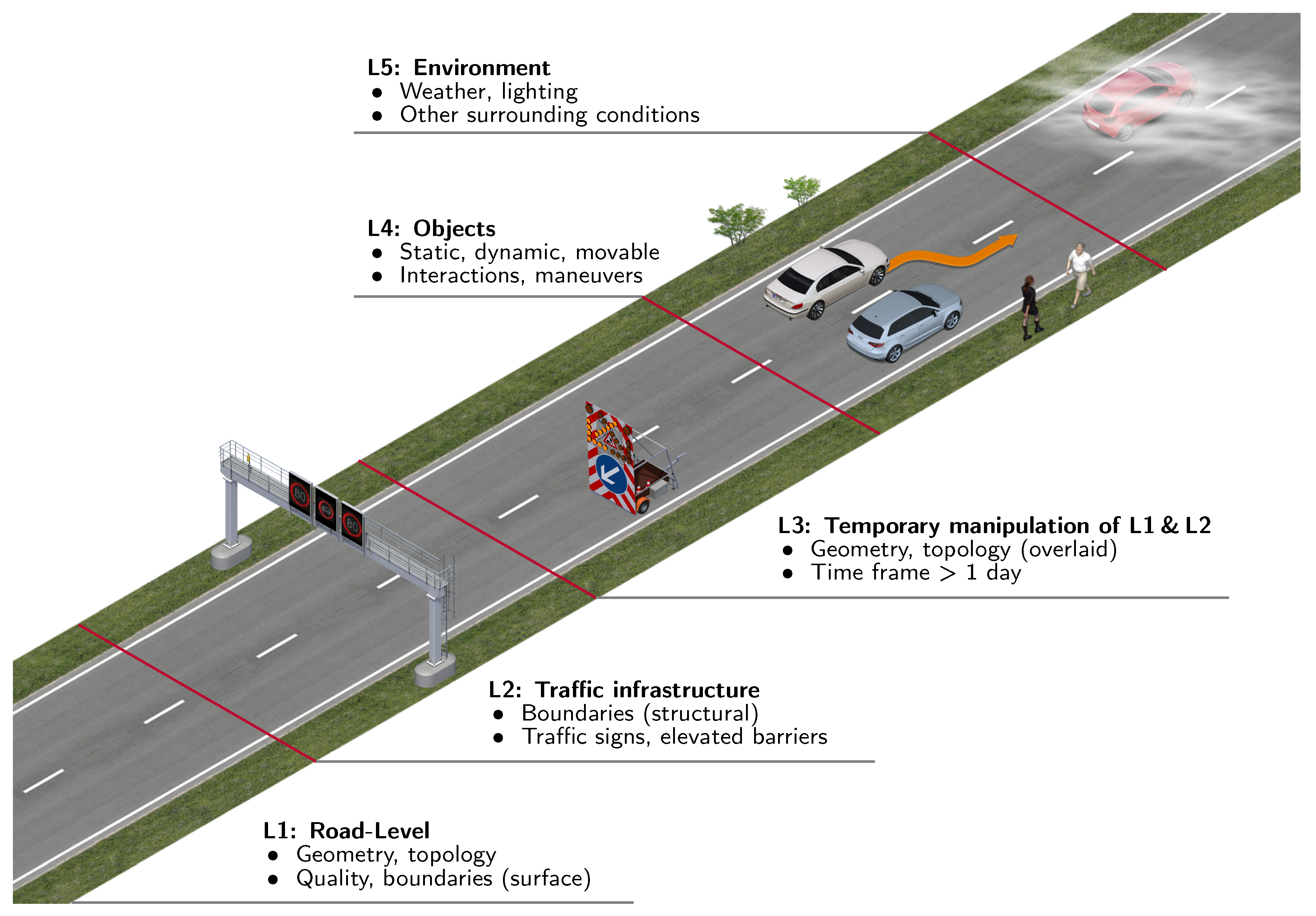
2. Literature and Requirements Review
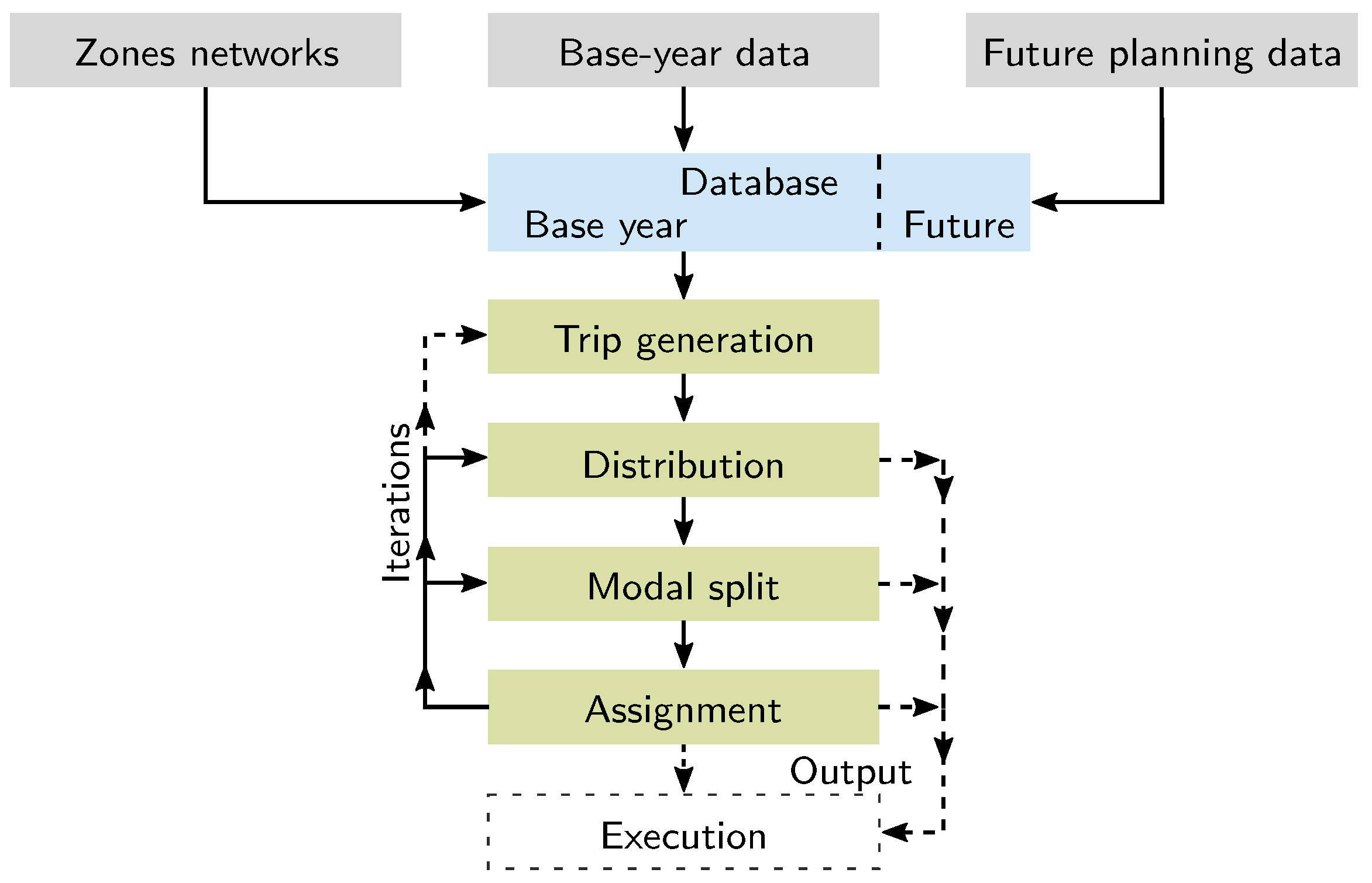
2.1. Transport Modeling
2.2. Driver and Vehicle Modeling
2.3. Pedestrian Behavior Modeling
2.4. Modeling of Other VRUs
2.5. Semantic 3D City Modeling
2.6. Tools and Simulators
2.7. Research and Development
3. Road Space Modeling and Application-Specific Preparation
3.1. Selection of Modeling Standards
3.1.1. OpenDRIVE
3.1.2. CityGML
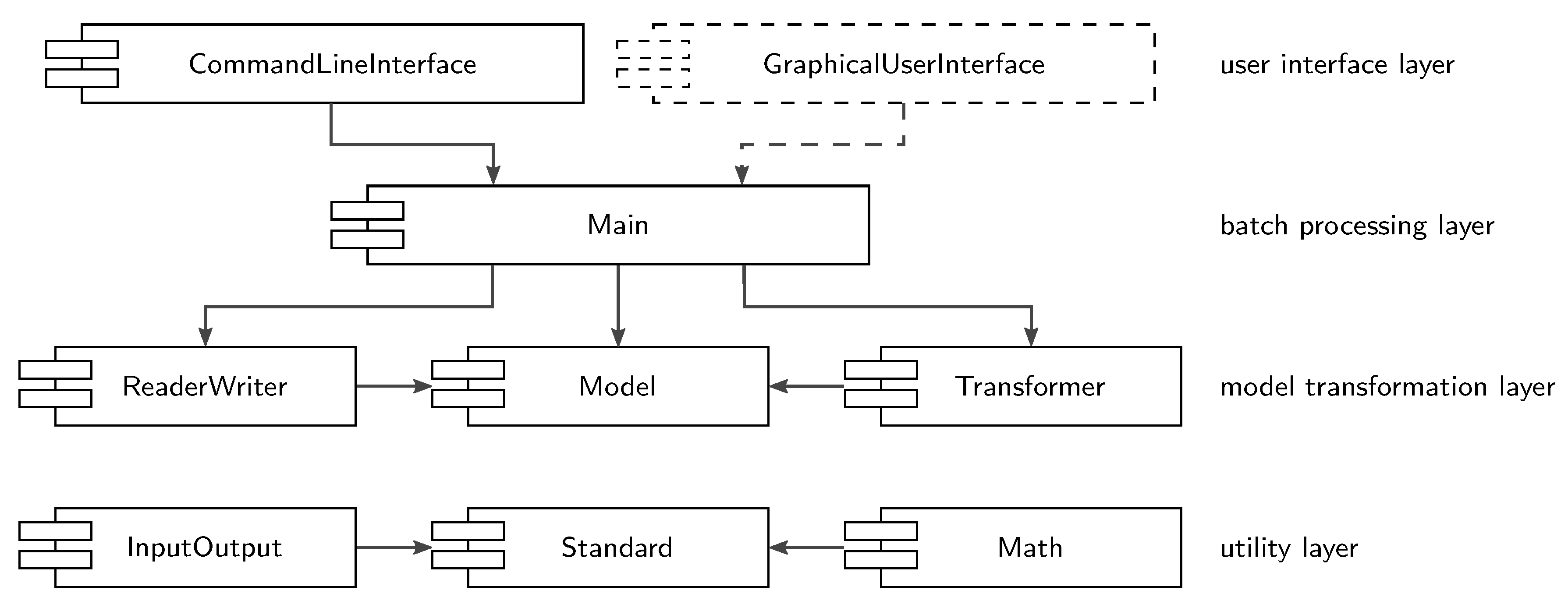
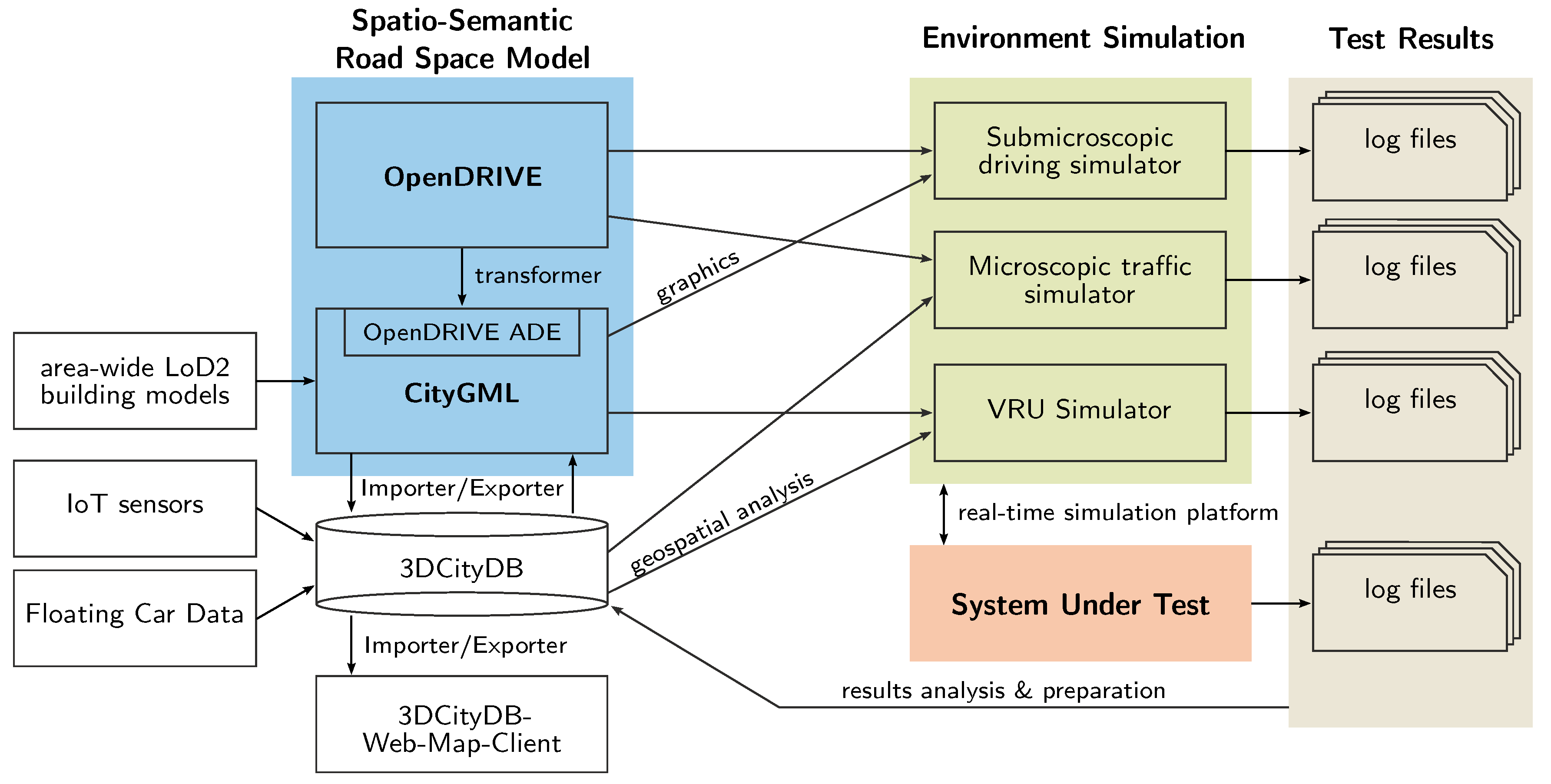
3.2. Modeling and Preparation Architecture
3.3. Model Preparation Pipeline
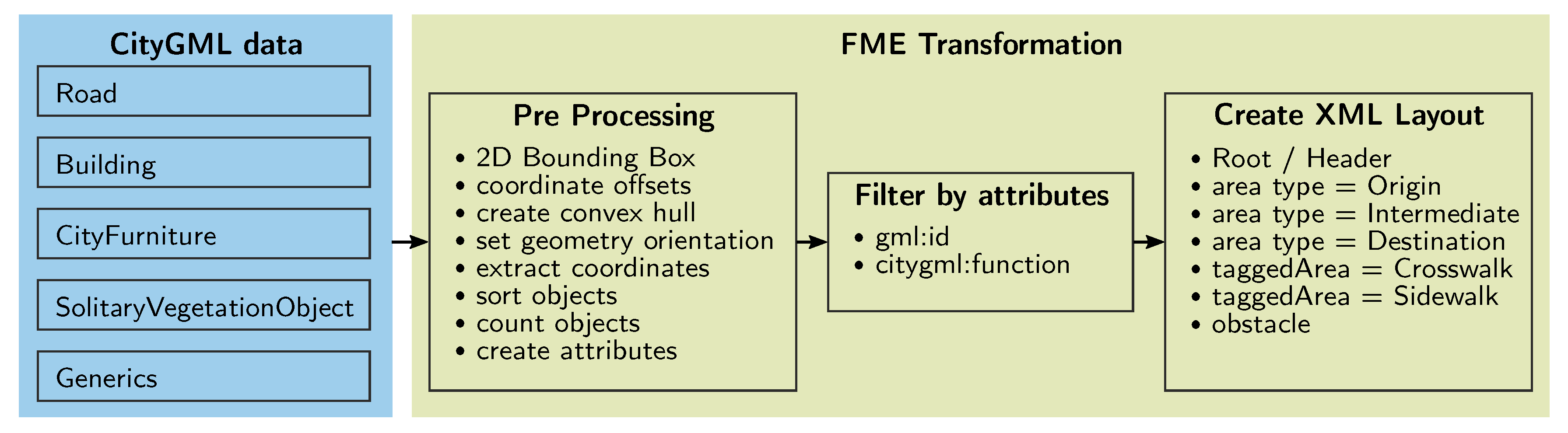
3.3.1. Transforming OpenDRIVE to CityGML
3.3.2. Transforming CityGML to MomenTUM’s Scenery Description
3.4. Road Space Information Model
3.5. Runtime of the Environment Simulation
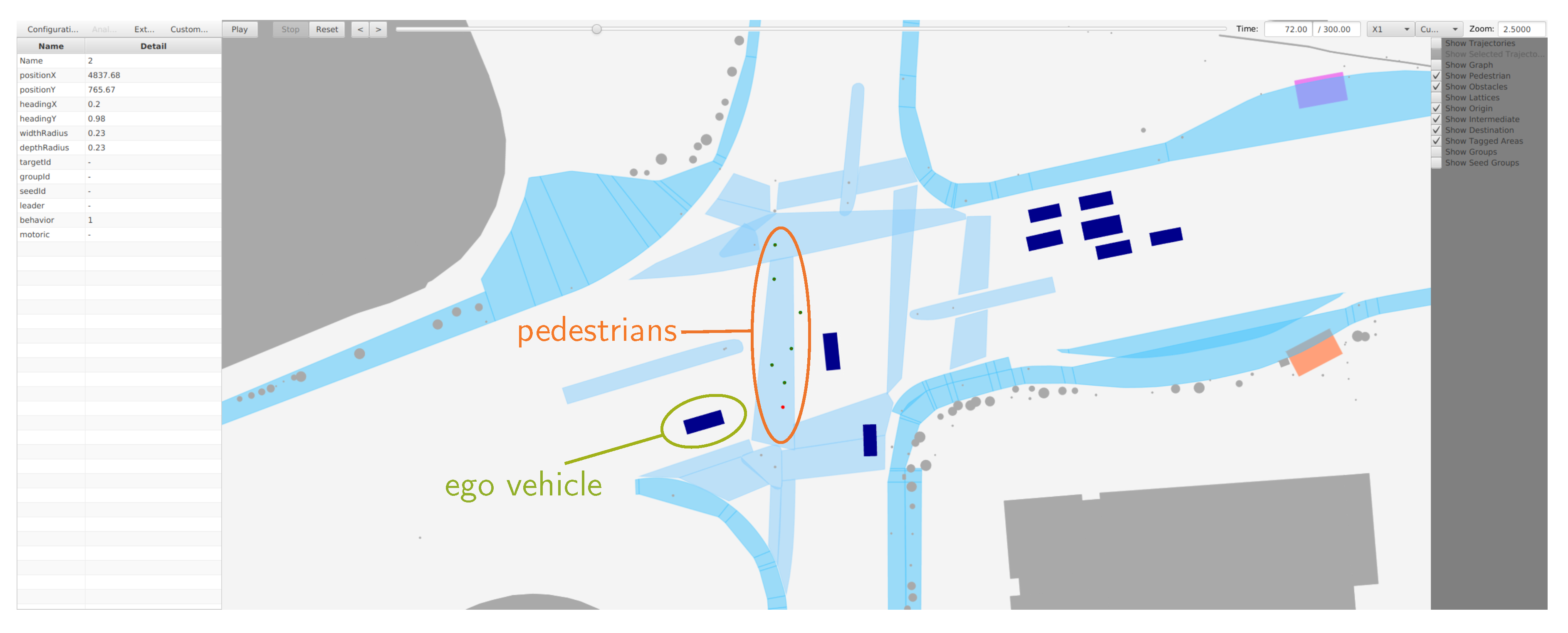
3.6. First Results of the Coupled Simulations
4. Discussion
4.1. Assessment of the Research Questions and Hypothesis
4.2. Potentials of the Concept
5. Conclusions and Future Works
Research Limitations
Author Contributions
Funding
Conflicts of Interest
References
- Gao, P.; Kaas, H.W.; Müller, N.; Wee, D.; Hensley, R.; Guan, M.; Möller, T.; Eckhard, G.; Bray, G.; Beiker, S.; et al. Automotive Revolution–Perspective towards 2030. Technical Report. 2016. Available online: http://hdl.voced.edu.au/10707/412253 (accessed on 13 April 2020).
- Azmat, M.; Kummer, S.; Moura, L.T.; Gennaro, F.D.; Moser, R. Future Outlook of Highway Operations with Implementation of Innovative Technologies Like AV, CV, IoT and Big Data. Logistics 2019, 3, 15. [Google Scholar] [CrossRef]
- Chan, C.Y. Advancements, Prospects, and Impacts of Automated Driving Systems. Int. J. Transp. Sci. Technol. 2017, 6, 208–216. [Google Scholar] [CrossRef]
- Di Fabio, U.; Broy, M.; Brüngger, R.J.; Eichhorn, U.; Grunwald, A.; Heckmann, D.; Hilgendorf, E.; Kagermann, H.; Losinger, A.; Lutz-Bachmann, M.; et al. Ethics Commission: Automated and Connected Driving. 2017. Available online: https://www.bmvi.de/SharedDocs/EN/publications/report-ethics-commission (accessed on 29 March 2020).
- Jing, P.; Xu, G.; Chen, Y.; Shi, Y.; Zhan, F. The Determinants behind the Acceptance of Autonomous Vehicles: A Systematic Review. Sustainability 2020, 12, 1719. [Google Scholar] [CrossRef]
- Wintersberger, S.; Azmat, M.; Kummer, S. Are We Ready to Ride Autonomous Vehicles? A Pilot Study on Austrian Consumers’ Perspective. Logistics 2019, 3, 20. [Google Scholar] [CrossRef]
- Arena, F.; Pau, G.; Collotta, M. A Survey on Driverless Vehicles: From Their Diffusion to Security Features. J. Internet Serv. Inf. Secur. 2018, 8, 1–19. [Google Scholar] [CrossRef]
- Wood, M.; Robbel, P.; Maass, M.; Tebbens, R.D.; Meijs, M.; Harb, M.; Reach, J.; Robinson, K.; Wittmann, D.; Srivastava, T.; et al. Safety First for Automated Driving. Technical Report. 2019. Available online: https://connectedautomateddriving.eu/wp-content/uploads/2019/09/Safety_First_for_Automated_Driving.pdf (accessed on 29 March 2020).
- Wachenfeld, W.; Junietz, P.; Wenzel, R.; Winner, H. The Worst-Time-to-Collision Metric for Situation Identification. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gothenburg, Sweden, 19–22 June 2016; pp. 729–734. [Google Scholar] [CrossRef]
- Von Neumann-Cosel, K. Virtual Test Drive. Ph.D. Thesis, Technical University of Munich, Department of Informatics, Munich, Germany, 2014. Available online: https://mediatum.ub.tum.de/1126934 (accessed on 29 March 2020).
- Schuldt, F. Ein Beitrag für den Methodischen Test von Automatisierten Fahrfunktionen mit Hilfe von Virtuellen Umgebungen. Ph.D. Thesis, Department of Electrical Engineering, Information Technology, Physics, Technical University Braunschweig, Braunschweig, Germany, 2017. [Google Scholar] [CrossRef]
- Riedmaier, S.; Nesensohn, J.; Gutenkunst, C.; Duser, T.; Schick, B.; Abdellatif, H. Validation of X-in-the-Loop Approaches for Virtual Homologation of Automated Driving Functions. In Proceedings of the 11th Graz Symposium Virtual Vehicle (GSVF), Graz, Austria, 15–16 May 2018. [Google Scholar]
- Von Neumann-Cosel, K.; Dupuis, M.; Weiss, C. Virtual Test Drive-Provision of a Consistent Tool-Set for [d, h, s, v]-in-the-Loop. In Proceedings of the 2009 Driving Simulation Conference Europe (DSC), Monte Carlo, Monaco, 4–6 February 2009. [Google Scholar]
- Bock, F.; Sippl, C.; Siegl, S.; German, R. Status Report on Automotive Software Development. In Automotive Systems and Software Engineering: State of the Art and Future Trends; Dajsuren, Y., van den Brand, M., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 29–57. [Google Scholar] [CrossRef]
- Stadler, C.; Gruber, T. Functional Engineering Platform—A Continuous Approach Towards Function Development. In Simulation and Testing for Vehicle Technology; Gühmann, C., Riese, J., von Rüden, K., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 69–84. [Google Scholar] [CrossRef]
- Schiller, M.; Dupius, M.; Krajzewicz, D.; Kern, A.; Knoll, A. Multi-Resolution Traffic Simulation for Large-Scale High-Fidelity Evaluation of VANET Applications. In Simulating Urban Traffic Scenarios; Behrisch, M., Weber, M., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 17–36. [Google Scholar] [CrossRef]
- Semrau, M.; Erdmann, J. Simulation Framework for Testing ADAS in Chinese Traffic Situations. In Proceedings of the 2016 SUMO User Conference, Berlin, Germany, 23–25 May 2016; pp. 103–115. [Google Scholar]
- Sippl, C.; Schwab, B.; Kielar, P.; Djanatliev, A. Distributed Real-Time Traffic Simulation for Autonomous Vehicle Testing in Urban Environments. In Proceedings of the 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 2562–2567. [Google Scholar] [CrossRef]
- Association for Standardization of Automation and Measuring Systems e.V. ASAM OpenDRIVE 1.6 Base Standard. Technical Report. 2020. Available online: https://www.asam.net/standards/detail/opendrive/ (accessed on 29 March 2020).
- Kolbe, T.H. Representing and Exchanging 3D City Models with CityGML. In 3D Geo-Information Sciences; Cartwright, W., Gartner, G., Meng, L., Peterson, M.P., Lee, J., Zlatanova, S., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 15–31. [Google Scholar] [CrossRef]
- Gröger, G.; Kolbe, T.H.; Nagel, C.; Häfele, K.H. OGC City Geography Markup Language CityGML Encoding Standard; Technical Report; OGC Doc.No. 12-019; 2012. Available online: https://www.ogc.org/standards/citygml (accessed on 29 April 2020).
- VIRES Simulationstechnologie GmbH. Virtual Test Drive. Available online: https://vires.com/vtd-vires-virtual-test-drive/ (accessed on 29 March 2020).
- Kielar, P.M.; Biedermann, D.H.; Borrmann, A. MomenTUMv2: A Modular, Extensible, and Generic Agent-Based Pedestrian Behavior Simulation Framework; Technical University of Munich, Department of Civil, Geo and Environmental Engineering: Munich, Germany, 2016. [Google Scholar] [CrossRef]
- Kielar, P.M. Kognitive Modellierung Und Computergestützte Simulation Der Räumlich-Sequenziellen Zielauswahl von Fußgängern. Ph.D. Thesis, Technical University of Munich, Department of Civil, Geo and Environmental Engineering, Munich, Germany, 2017. Available online: https://mediatum.ub.tum.de/1359816 (accessed on 29 March 2020).
- Menzel, T.; Bagschik, G.; Maurer, M. Scenarios for Development, Test and Validation of Automated Vehicles. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 1821–1827. [Google Scholar] [CrossRef]
- PEGASUS Project Partners. PEGAUS Method: An Overview. Technical Report. 2019. Available online: https://www.pegasusprojekt.de/files/tmpl/Pegasus-Abschlussveranstaltung/PEGASUS-Gesamtmethode.pdf (accessed on 29 March 2020).
- Sippl, C.; Bock, F.; Lauer, C.; Heinz, A.; Neumayer, T.; German, R. Scenario-Based Systems Engineering: An Approach Towards Automated Driving Function Development. In Proceedings of the 13th Annual IEEE International Systems Conference (SYSCON), Orlando, FL, USA, 8–11 April 2019; pp. 1–8. [Google Scholar] [CrossRef]
- Sippl, C.; Bock, F.; Huber, B.; Djanatliev, A.; German, R. Identifying relevant traffic situations based on human decision making. In Proceedings of the 19th Stuttgart International Symposium, Wiesbaden, Germany, 19–20 March 2019; pp. 1003–1017. [Google Scholar] [CrossRef]
- Bagschik, G.; Menzel, T.; Maurer, M. Ontology Based Scene Creation for the Development of Automated Vehicles. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 1813–1820. [Google Scholar] [CrossRef]
- Hoogendoorn, S.P.; Bovy, P.H.L. State-of-the-Art of Vehicular Traffic Flow Modelling. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2001, 215, 283–303. [Google Scholar] [CrossRef]
- Schwab, B.; Kolbe, T.H. Requirement Analysis of 3D Road Space Models for Automated Driving. ISPRS Ann. Photogramm. Remote. Sens. Spat. Inf. Sci. 2019, IV-4/W8, 99–106. [Google Scholar] [CrossRef]
- Richter, A.; Löwner, M.O.; Ebendt, R.; Scholz, M. Towards an Integrated Urban Development Considering Novel Intelligent Transportation Systems. Technol. Forecast. Soc. Chang. 2020, 155, 119970. [Google Scholar] [CrossRef]
- Ortúzar, J.d.D.; Willumsen, L.G.; Consultancy, L.W. Modelling Transport, 4th ed.; John Wiley & Sons, Ltd.: Chichester, UK, 2011. [Google Scholar]
- Biljecki, F.; Arroyo Ohori, K.; Ledoux, H.; Peters, R.; Stoter, J. Population Estimation Using a 3D City Model: A Multi-Scale Country-Wide Study in the Netherlands. PLoS ONE 2016, 11, e0156808. [Google Scholar] [CrossRef]
- Kaden, R.; Kolbe, T.H. City-Wide Total Energy Demand Estimation of Buildings Using Semantic 3D City Models and Statistical Data. ISPRS Ann. Photogramm. Remote. Sens. Spat. Inf. Sci. 2013, II-2/W1, 163–171. [Google Scholar] [CrossRef]
- Bonnel, P.; Fekih, M.; Smoreda, Z. Origin-Destination Estimation Using Mobile Network Probe Data. Transp. Res. Procedia 2018, 32, 69–81. [Google Scholar] [CrossRef]
- Donges, E. Driver Behavior Models. In Handbook of Driver Assistance Systems; Winner, H., Hakuli, S., Lotz, F., Singer, C., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 19–33. [Google Scholar] [CrossRef]
- Rasmussen, J. Skills, Rules, and Knowledge; Signals, Signs, and Symbols, and Other Distinctions in Human Performance Models. IEEE Trans. Syst. Man, Cybern. 1983, SMC-13, 257–266. [Google Scholar] [CrossRef]
- Michon, J.A. A Critical View of Driver Behavior Models: What Do We Know, What Should We Do? In Human Behavior and Traffic Safety; Evans, L., Schwing, R.C., Eds.; Springer: Boston, MA, USA, 1985; pp. 485–524. [Google Scholar] [CrossRef]
- Donges, E. A Two-Level Model of Driver Steering Behavior. Hum. Factors 1978, 20, 691–707. [Google Scholar] [CrossRef]
- Andersen, G.J.; Sauer, C.W. Optical Information for Car Following: The Driving by Visual Angle (DVA) Model. Hum. Factors J. Hum. Factors Ergon. Soc. 2007, 49, 878–896. [Google Scholar] [CrossRef] [PubMed]
- Brackstone, M.; McDonald, M. Car-Following: A Historical Review. Transp. Res. Part Traffic Psychol. Behav. 1999, 2, 181–196. [Google Scholar] [CrossRef]
- Arena, F.; Pau, G.; Severino, A. V2X Communications Applied to Safety of Pedestrians and Vehicles. J. Sens. Actuator Netw. 2020, 9, 3. [Google Scholar] [CrossRef]
- Xu, J.; Li, Y.; Lu, G.; Zhou, W. Reconstruction Model of Vehicle Impact Speed in Pedestrian–Vehicle Accident. Int. J. Impact Eng. 2009, 36, 783–788. [Google Scholar] [CrossRef]
- Rubrecht, B.; Bastien, C.; Davies, H.; Wellings, R.; Burnett, B. Numerical Validation of the Pedestrian Crossing Speed Calculator (PCSC) Using Finite Element Simulations. Glob. J. Forensic Sci. Med. Forensic 2019, 1, GJFSM-19-RA-525. [Google Scholar]
- Hoogendoorn, S.P.; Bovy, P.H.L.; Daamen, W. Microscopic Pedestrian Wayfinding and Dynamics Modelling. In Pedestrian and Evacuation Dynamics; Schreckenberg, M., Sharma, S.D., Eds.; Springer: Berlin/Heidelberg, Germany, 2002; pp. 123–154. [Google Scholar]
- Papadimitriou, E.; Yannis, G.; Golias, J. A Critical Assessment of Pedestrian Behaviour Models. Transp. Res. Part Traffic Psychol. Behav. 2009, 12, 242–255. [Google Scholar] [CrossRef]
- Kielar, P.M.; Borrmann, A. Modeling Pedestrians’ Interest in Locations: A Concept to Improve Simulations of Pedestrian Destination Choice. Simul. Model. Pract. Theory 2016, 61, 47–62. [Google Scholar] [CrossRef]
- Bierlaire, M.; Robin, T. Pedestrians Choices. In Pedestrian Behavior; Timmermans, H., Ed.; Emerald Group Publishing Limited: Bingley, UK, 2009; pp. 1–26. [Google Scholar] [CrossRef]
- Kneidl, A.; Borrmann, A.; Hartmann, D. Generation and Use of Sparse Navigation Graphs for Microscopic Pedestrian Simulation Models. Adv. Eng. Inform. 2012, 26, 669–680. [Google Scholar] [CrossRef]
- Hartmann, D. Adaptive Pedestrian Dynamics Based on Geodesics. New J. Phys. 2010, 12, 043032. [Google Scholar] [CrossRef]
- Blue, V.J.; Adler, J.L. Cellular Automata Microsimulation for Modeling Bi-Directional Pedestrian Walkways. Transp. Res. Part B Methodol. 2001, 35, 293–312. [Google Scholar] [CrossRef]
- Helbing, D.; Molnár, P. Social Force Model for Pedestrian Dynamics. Phys. Rev. E 1995, 51, 4282–4286. [Google Scholar] [CrossRef] [PubMed]
- Zeng, W.; Chen, P.; Nakamura, H.; Iryo-Asano, M. Application of Social Force Model to Pedestrian Behavior Analysis at Signalized Crosswalk. Transp. Res. Part Emerg. Technol. 2014, 40, 143–159. [Google Scholar] [CrossRef]
- Twaddle, H.A. Development of Tactical and Operational Behaviour Models for Bicyclists Based on Automated Video Data Analysis. Ph.D. Thesis, Technical University of Munich, Department of Civil, Geo and Environmental Engineering, Munich, Germany, 2017. Available online: https://mediatum.ub.tum.de/1366878 (accessed on 29 March 2020).
- Hoogendoorn, S.P.; Daamen, W. Microscopic Calibration and Validation of Pedestrian Models: Cross-Comparison of Models Using Experimental Data. In Traffic and Granular Flow’05; Schadschneider, A., Pöschel, T., Kühne, R., Schreckenberg, M., Wolf, D.E., Eds.; Springer: Berlin/Heidelberg, Germany, 2007; pp. 329–340. [Google Scholar] [CrossRef]
- Heo, J.; Jeong, S.; Park, H.K.; Jung, J.; Han, S.; Hong, S.; Sohn, H.G. Productive High-Complexity 3D City Modeling with Point Clouds Collected from Terrestrial LiDAR. Comput. Environ. Urban Syst. 2013, 41, 26–38. [Google Scholar] [CrossRef]
- IPG Automotive GmbH. CarMaker: Virtual Testing of Automobiles and Light-Duty Vehicles. Available online: https://ipg-automotive.com/products-services/simulation-software/carmaker/ (accessed on 29 March 2020).
- Vector Informatik GmbH. DYNA4–Virtual Test Driving. Available online: https://www.vector.com/dyna4 (accessed on 29 March 2020).
- Mechanical Simulation Corporation. CarSim. Available online: https://www.carsim.com/products/carsim/ (accessed on 29 March 2020).
- Dosovitskiy, A.; Ros, G.; Codevilla, F.; Lopez, A.; Koltun, V. CARLA: An Open Urban Driving Simulator. In Proceedings of the 1st Annual Conference on Robot Learning (CoRL), Mountain View, CA, USA, 13–15 November 2017; pp. 1–16. Available online: http://proceedings.mlr.press/v78/dosovitskiy17a/dosovitskiy17a.pdf (accessed on 29 March 2020).
- Casas, J.; Ferrer, J.L.; Garcia, D.; Perarnau, J.; Torday, A. Traffic Simulation with Aimsun. In Fundamentals of Traffic Simulation; Barceló, J., Ed.; Springer: New York, NY, USA, 2010; Volume 145, pp. 173–232. [Google Scholar] [CrossRef]
- PTV Planung Transport Verkehr, AG. PTV Vissim. Available online: https://www.ptvgroup.com/en/solutions/products/ptv-vissim/ (accessed on 29 March 2020).
- Krajzewicz, D.; Erdmann, J.; Behrisch, M.; Bieker, L. Recent Development and Applications of SUMO-Simulation of Urban MObility. Int. J. Adv. Syst. Meas. 2012, 5, 128–138. [Google Scholar]
- Saidallah, M.; El Fergougui, A.; Elalaoui, A.E. A Comparative Study of Urban Road Traffic Simulators. Matec Web Conf. 2016, 81, 05002. [Google Scholar] [CrossRef]
- Mubasher, M.M.; Syed Waqar ul Qounain, J. Systematic Literature Review of Vehicular Traffic Flow Simulators. In Proceedings of the 2015 International Conference on Open Source Software Computing (OSSCOM), Amman, Jordan, 10–13 September 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Barceló, J. (Ed.) Fundamentals of Traffic Simulation; International Series in Operations Research & Management Science; Springer: New York, NY, USA, 2010; Volume 145. [Google Scholar] [CrossRef]
- Wagoum, A.U.K.; Chraibi, M.; Zhang, J.; Lämmel, G. JuPedSim: An Open Framework for Simulating and Analyzing the Dynamics of Pedestrians. In Proceedings of the 3rd Conference of Transportation Research Group of India (CTRG), Kolkata, India, 17–20 December 2015. [Google Scholar]
- Curtis, S.; Best, A.; Manocha, D. Menge: A Modular Framework for Simulating Crowd Movement. Collect. Dyn. 2016, 1, 1–40. [Google Scholar] [CrossRef]
- Kleinmeier, B.; Zönnchen, B.; Gödel, M.; Köster, G. Vadere: An Open-Source Simulation Framework to Promote Interdisciplinary Understanding. Collect. Dyn. 2019, 4. [Google Scholar] [CrossRef]
- PTV Planung Transport Verkehr, AG. PTV Viswalk. Available online: https://www.ptvgroup.com/en/solutions/products/ptv-viswalk/ (accessed on 29 March 2020).
- accu:rate GmbH. Crowd:It. Available online: https://www.accu-rate.de/en/software-crowd-it-en/ (accessed on 29 March 2020).
- Strigel, E.; Meissner, D.; Seeliger, F.; Wilking, B.; Dietmayer, K. The Ko-PER Intersection Laserscanner and Video Dataset. In Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems (ITSC), Qingdao, China, 8–11 October 2014; pp. 1900–1901. [Google Scholar] [CrossRef]
- Zeng, W.; Chen, P.; Yu, G.; Wang, Y. Specification and Calibration of a Microscopic Model for Pedestrian Dynamic Simulation at Signalized Intersections: A Hybrid Approach. Transp. Res. Part C Emerg. Technol. 2017, 80, 37–70. [Google Scholar] [CrossRef]
- Association for Standardization of Automation and Measuring Systems e.V. ASAM OpenCRG 1.1.2. Technical Report. 2018. Available online: https://www.asam.net/standards/detail/opencrg/ (accessed on 29 March 2020).
- Kutzner, T.; Chaturvedi, K.; Kolbe, T.H. CityGML 3.0: New Functions Open Up New Applications. PFG J. Photogramm. Remote. Sens. Geoinf. Sci. 2020. [Google Scholar] [CrossRef]
- Beil, C.; Kolbe, T.H. CityGML and the Streets of New York – A Proposal for Detailed Street Space Modelling. ISPRS Ann. Photogramm. Remote. Sens. Spat. Inf. Sci. 2017, IV-4/W5, 9–16. [Google Scholar] [CrossRef]
- Labetski, A.; van Gerwen, S.; Tamminga, G.; Ledoux, H.; Stoter, J. A Proposal for an Improved Transportation Model in CityGML. ISPRS Int. Arch. Photogramm. Remote. Sens. Spat. Inf. Sci. 2018, XLII-4/W10, 89–96. [Google Scholar] [CrossRef]
- Biljecki, F.; Kumar, K.; Nagel, C. CityGML Application Domain Extension (ADE): Overview of Developments. Open Geospat. Data Softw. Stand. 2018, 3, 13. [Google Scholar] [CrossRef]
- Van den Brink, L.; Stoter, J.; Zlatanova, S. UML-Based Approach to Developing a CityGML Application Domain Extension. Trans. GIS 2013, 17, 920–942. [Google Scholar] [CrossRef]
- Safe Software Inc. FME–Feature Manipulation Engine. Available online: https://www.safe.com/fme/ (accessed on 29 March 2020).
- Jemerov, D.; Isakova, S. Kotlin in Action; Manning Publications Co.: Shelter Island, NY, USA, 2017. [Google Scholar]
- Martin, R.C. Clean Architecture: A Craftsman’s Guide to Software Structure and Design, 1st ed.; Robert C. Martin Series; Prentice Hall: Upper Saddle River, NJ, USA, 2017. [Google Scholar]
- MapStruct. MapStruct—Java Bean Mappings, the Easy Way! Available online: https://mapstruct.org (accessed on 29 March 2020).
- Nagel, C. Citygml4j. Available online: https://github.com/citygml4j/citygml4j (accessed on 29 March 2020).
- Chair of Geoinformatics, Technical University of Munich. 3DCityDB-Web-Map-Client. Available online: https://github.com/3dcitydb/3dcitydb-web-map (accessed on 29 March 2020).
- Klimke, J. Libcitygml. Available online: https://github.com/jklimke/libcitygml (accessed on 29 March 2020).
- Yao, Z.; Nagel, C.; Kunde, F.; Hudra, G.; Willkomm, P.; Donaubauer, A.; Adolphi, T.; Kolbe, T.H. 3DCityDB—A 3D Geodatabase Solution for the Management, Analysis, and Visualization of Semantic 3D City Models Based on CityGML. Open Geospat. Data, Softw. Stand. 2018, 3. [Google Scholar] [CrossRef]
- Casado-Sanz, N.; Guirao, B.; Lara Galera, A.; Attard, M. Investigating the Risk Factors Associated with the Severity of the Pedestrians Injured on Spanish Crosstown Roads. Sustainability 2019, 11, 5194. [Google Scholar] [CrossRef]
- Congiu, T.; Sotgiu, G.; Castiglia, P.; Azara, A.; Piana, A.; Saderi, L.; Dettori, M. Built Environment Features and Pedestrian Accidents: An Italian Retrospective Study. Sustainability 2019, 11, 1064. [Google Scholar] [CrossRef]
- Ruhdorfer, R.; Willenborg, B.; Sindram, M. Coupling of Traffic Simulations and Semantic 3D City Models. gis.Science 2018, 3, 101–109. Available online: https://gispoint.de/artikelarchiv/gis/2018/gisscienceausgabe-32018/4611-kopplung-von-verkehrssimulationen-und-semantischen-3d-stadt-modellen.html (accessed on 29 March 2020).














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Entities | Attributes | Geometry | Spatio-Semantic Road Space Model | Target Formats | ||
|---|---|---|---|---|---|---|
| OpenDRIVE 1.5 | CityGML 2.0 | MomenTUM Layout (2D) | VTD OpenSceneGraph | |||
| Road | ||||||
| Road reference line | line | PlanView, ElevationProfile | GenericCityObject | |||
| Lane reference line | line | LaneOffset | GenericCityObject | |||
| Center lane | line | LaneSectionCenterLane | GenericCityObject | |||
| Driving lane | surface | LaneSectionLRLane (type: driving) | TrafficArea | Geometry | ||
| Sidewalk lane | surface | LaneSectionLRLane (type: sidewalk) | TrafficArea | TaggedArea (type: sidewalk) | Geometry | |
| Shoulder lane | surface | LaneSectionLRLane (type: shoulder) | TrafficArea | Geometry | ||
| Crosswalk | surface | RoadObject (type: roadMark) | GenericCityObject | TaggedArea (type: crosswalk) | Geometry | |
| Bus | surface | RoadObject (type: roadMark) | GenericCityObject | Geometry | ||
| Raised median | solid | RoadObject (type: barrier) | GenericCityObject | Geometry | ||
| Traffic island | solid | RoadObject (type: barrier) | GenericCityObject | Geometry | ||
| Road Mark | ||||||
| Lane boundary | type (solid, broken, ...), weight, color | surface | RoadMark | TrafficArea | Geometry | |
| Road mark | name (arrow, stop line, ...) | surface | RoadObject (type: roadMark) | GenericCityObject | Geometry | |
| City Furniture | ||||||
| Bench | solid | RoadObject (type: obstacle) | CityFurniture | Obstacle | Geometry | |
| Controller box | solid | RoadObject (type: obstacle) | CityFurniture | Obstacle | Geometry | |
| Fence | solid | RoadObject (type: barrier) | CityFurniture | Obstacle | Geometry | |
| Guard rail | solid | RoadObject (type: barrier) | CityFurniture | Obstacle | Geometry | |
| Railing | solid | RoadObject (type: barrier) | CityFurniture | Obstacle | Geometry | |
| Street lamp | solid | RoadObject (type: pole) | CityFurniture | Obstacle | Geometry | |
| Traffic light | point | Signal | CityFurniture | |||
| Traffic light pole | solid | RoadObject (type: pole) | CityFurniture | Obstacle | Geometry | |
| Traffic sign | point | Signal | CityFurniture | |||
| Traffic sign pole | solid | RoadObject (type: pole) | CityFurniture | Obstacle | Geometry | |
| Wall | solid | RoadObject (type: barrier) | CityFurniture | Obstacle | Geometry | |
| Vegetation | ||||||
| Tree | solid | RoadObject (type: tree) | SolitaryVegetationObject | Obstacle | Geometry | |
| Vegetation | solid | RoadObject (type: vegetation) | SolitaryVegetationObject | Obstacle | Geometry | |
| Building | ||||||
| Building | solid | RoadObject (type: building) | Building | Obstacle | Geometry | |
| Door | Door | Area (type: origin, destination) | Geometry | |||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schwab, B.; Beil, C.; Kolbe, T.H. Spatio-Semantic Road Space Modeling for Vehicle–Pedestrian Simulation to Test Automated Driving Systems. Sustainability 2020, 12, 3799. https://doi.org/10.3390/su12093799
Schwab B, Beil C, Kolbe TH. Spatio-Semantic Road Space Modeling for Vehicle–Pedestrian Simulation to Test Automated Driving Systems. Sustainability. 2020; 12(9):3799. https://doi.org/10.3390/su12093799
Chicago/Turabian StyleSchwab, Benedikt, Christof Beil, and Thomas H. Kolbe. 2020. "Spatio-Semantic Road Space Modeling for Vehicle–Pedestrian Simulation to Test Automated Driving Systems" Sustainability 12, no. 9: 3799. https://doi.org/10.3390/su12093799
APA StyleSchwab, B., Beil, C., & Kolbe, T. H. (2020). Spatio-Semantic Road Space Modeling for Vehicle–Pedestrian Simulation to Test Automated Driving Systems. Sustainability, 12(9), 3799. https://doi.org/10.3390/su12093799