1. Introduction
The continuously growing population and energy demand has encouraged many countries around the world, especially the developing ones, to make compelling efforts for exploring the alternative sources of energy [
1,
2,
3,
4]. These efforts also come with a vision to mitigate the effects of climate change due to the growing CO
2 emissions from existing non-renewable energy sources [
5]. Amongst the different renewable energy sources, ocean energy has some added advantages, such as high energy density, long-lasting reserves, and ease in developing [
6]. Due to these advantages, ocean power has been attracting growing interest and is continually witnessing a growing trend in the field of power generation by renewables [
7]. Significant research is being carried out to review the potential and sustainability of both on-grid and off-grid renewable hydropower technologies [
8,
9,
10]. Ocean energy is available in different forms, such as ocean thermal, waves, salinity gradient, and ocean currents [
11]. Ocean currents are a result of different forces acting on the ocean water including wind, breaking waves, effect of cabbeling, Coriolis effect, and temperature and salinity differences [
12]. Apart from being continuously available, energy from marine currents is predictable, reliable, and globally available on all continents. The rapidly occurring climate changes can affect the predictability and the circulating pattern of ocean currents. According to a recent study conducted by Shijian et al. focusing on the changes in ocean current circulations around the world, 76% of the ocean currents circulating as deep as 2000 m have accelerated by 5% per decade since the early 1990s [
13]. This acceleration in the ocean currents’ speed highlights the increased potential of the available kinetic energy which can be extracted from the ocean currents. On the other hand, the deployment of tidal current turbines for extracting the energy is gaining popularity as it requires lower cost and has lower visual, as well as ecological, impacts as compared to the tidal barrages. Countries like those of the European Union, China, and Japan have shown the most and continuously growing interest for research in this field [
14,
15].
Depending upon their axis of rotation, the Ocean Current Turbines (OCT) are broadly classified into two categories—Horizontal Axis Ocean Current Turbines (HAOCTs) and Vertical Axis Ocean Current Turbines (VAOCTs) [
16]. The world’s first commercial scale offshore tidal turbine “Seaflow” was a horizontal axis turbine having a rated power of 300 KW and was installed by Marine Current Turbines Ltd. and IT Power near Lynmouth in Devon in the year 2003 [
17]. Since then, a number of designs of hydrokinetic turbines have been studied and tested to find out the ideal types of devices depending upon the specific locations. The HAOCTs are the most preferred type due to their higher power efficiency and the higher generation of torque [
18,
19]. Computational Fluid Dynamics (CFD) has been widely used and proven as an effective tool for accurately predicting the performance of wind and ocean turbines in a number of studies [
20,
21,
22]. The HAOCTs are subdivided into two types—the axial flow turbines and the in-plane axis turbines [
23]. The axial flow turbines have a rotational axis parallel to the incoming water flow and mostly operate on the lift force generated on the blades. The in-plane axis turbines on the other hand, have a rotational axis perpendicular to the incoming flow and are mainly driven by the drag force on the surface of the blades [
24]. The turbine design investigated in this study is a drag-based in-plane horizontal axis ocean current turbine. It is designed as a low head hydrokinetic turbine for harnessing energy from currents, having velocities as low as 0.5 m/s to above 4.4 m/s [
25]. The conceptual sketch of the turbine blade is shown in
Figure 1. The turbine is mainly driven by the drag force on the concave side of the turbine blade exposed to the flow. As the flow hits the concave side of the advancing blade, a pressure differential is created across the surface of the scoop, which results in a drag force that makes the rotor spin. Its aerodynamical design is very simple to build, which reduces its cost drastically compared to the aerofoil blade designs of the other vertical axis and horizontal axis turbines.
A number of studies have been carried out for the drag type of ocean turbines where the use of a deflector or shielding plates have contributed to overall performance enhancement of the turbine. Golecha et al. conducted a study on a Savonius rotor with and without a deflector plate. The study concluded that the turbine with a deflector increased the power coefficient by 50% more than that achieved by a turbine without a deflector [
26]. Sahim et al. studied the performance of Darrieus and a hybrid of Darrieus and Savonius turbines with and without a deflector. The results obtained from the study show that the presence of a deflector increased the torque coefficient up to 30% for the solo Darrieus turbine and 41% for the hybrid turbine [
27]. The application of deflecting bottom fins for the paddle wheels of a hydropower system studied by Akinyemi and Liu [
28] increased the power generation capacity for the system by more than 200% and up to 300% in some other cases of stream water wheels [
29]. A numerical investigation conducted by Hemida et al. for the hydrokinetic Savonius rotor demonstrated that the use of two shielding plates upstream of the turbine at an optimum angle increased the C
p of the turbine by 80% in comparison with the turbine without any shielding plates [
30]. The common feature which can be noted from these studies is the decrease in negative torque values on the returning blades, thus achieving a higher ratio of pressure differential created between the approaching and returning blade, leading to the increase in overall torque value and hence the power coefficient.
As the present study investigates a new concept of turbine blade, which has not been studied to much extent yet and majorly operates on the drag mechanism, the use of a deflector and its effect on the performance on this new design has been considered. A similar enhancement of performance due to the presence of a deflector plate as observed in other studies mentioned above can be hypothesized, however, the extent or degree of enhancement is a key question for the investigation. The installation depth of the hydrokinetic turbine is another factor which is considered to be very important when it comes to the deployment of OCT. Studies indicate the lower depth of immersion accounts for a higher value of power coefficient. Kolekar and Banerjee [
31] carried out a study on the performance of a HAOCT for different depths of immersion in an open surface water channel. The turbine showed improved performance when it was elevated upwards from the channel bed and the trend continued till the blade-tip clearance from the free surface was at a distance of 0.5 times the radius of the turbine. Unlike the traditional hydropower systems which utilize dams and tidal barrages for energy conversion, the ocean current turbines work on a similar principle as the wind turbines, but completely submerged underwater. They generate power from the kinetic energy of moving water and the power available is a function of the velocity of the current cubed. The fact that the greater depth results in lesser efficiencies can be due to the decrement in the flow velocity and an increasing fluid pressure at high depths near the channel bed [
32]. However, the studies on OCT considering the depth of deployment are very scarce and most of the three-dimensional or two-dimensional simulation studies generally consider a uniform pressure across the depth of the flow. The variations in the turbine performance for those specific designs at different depths is therefore not taken into account. For the current study, the bare turbine performance, the effect of a deflector, and the influence of the operating depth is therefore studied separately.
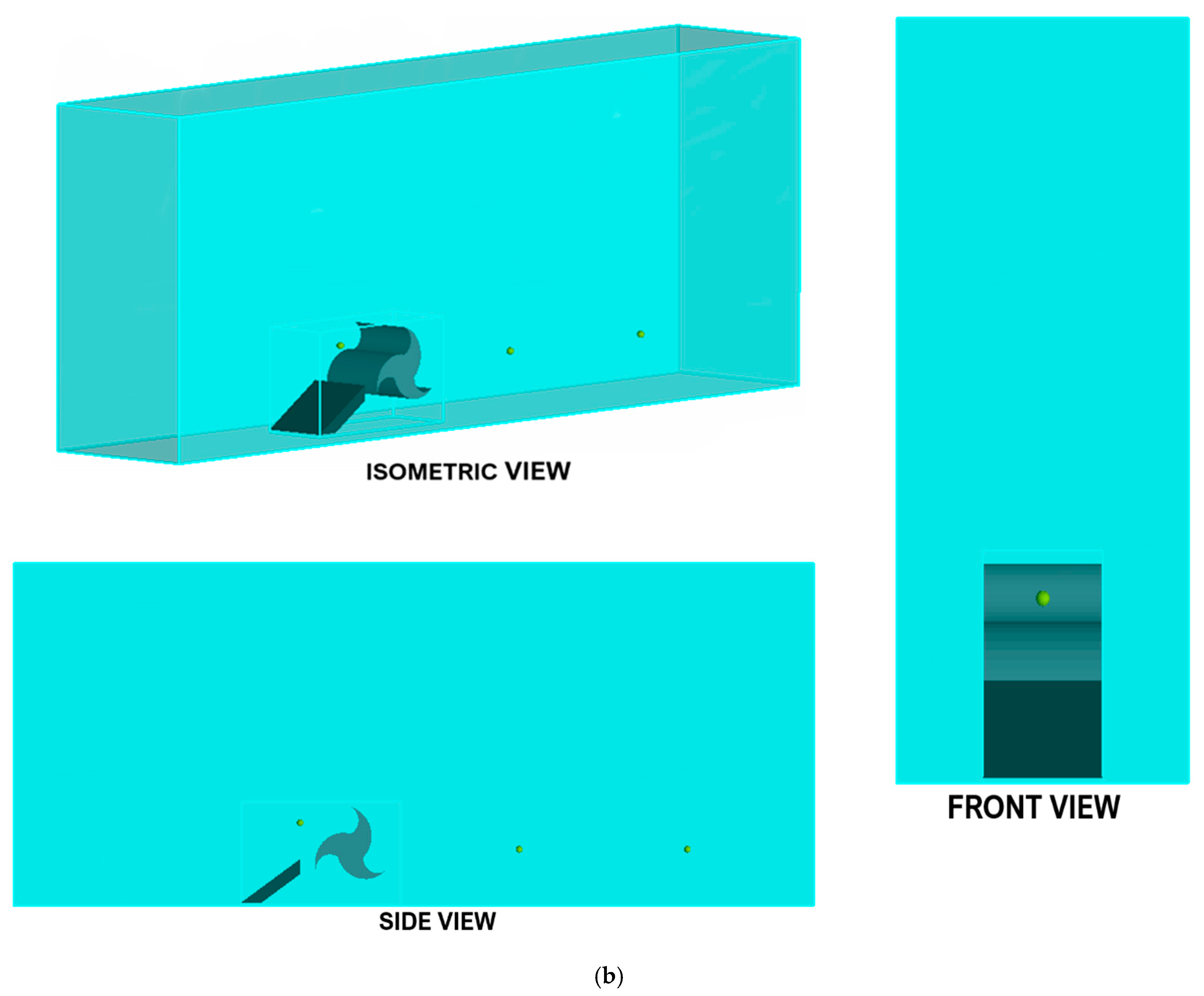
In the present study, the turbine design has been investigated for three different cases, as shown in
Figure 2, and then comparisons have been made to exhibit the differences in the measured parameters. In the first case, the turbine has been analyzed without any deflectors, and for the second case, a deflector has been added to counter the negative torque on the returning blade. For the first two cases, the turbine is located in the vertical center of the computational domain. For the third case, the turbine with the deflector has been located at the base of the computational domain for studying the influence of a higher fluid pressure and proximity of the channel bed on the performance of the turbine. The initial study was carried out to determine the appropriate profile for the deflector plate. The flat profile for the deflector was chosen after measuring and comparing the torque values for both the curved and flat profiles at different angles for a specific Tip-Speed Ratio (TSR). Results for the same have been reported in
Section 4. The numerical simulations have been carried out for a range of TSR, which vary from 0.6 to 1.8 at a flow velocity of 0.7 m/s. The computational fluid dynamics software Flow-3D has been used to run the numerical simulations and the turbine has been modeled in DesignModeler software. The standard k-epsilon (k-ε) turbulence model has been chosen for solving the Reynolds-Averaged Navier–Stokes equations (RANS) for the flow.
5. Practical Applications
Most of the conventional hydrokinetic turbines are designed for locations having flow velocities greater than 1.2–1.5 m/s and for high ocean depths [
59]. These limitations restrict their deployment for regions having shallow depths and low flow velocities. The studied design of the in-plane HAOCT can prove useful for such sites where the flow velocity is not feasible for deployment of the conventional designs and where the depth of the water channel is limited. In such a case, a number of rotors can be stacked side-by-side over a large distance across a channel flow to harness the kinetic energy. On the other hand, as mentioned earlier in
Section 1, many optimization studies considering the use of a deflector, with some considering multiple deflectors, have been carried out for drag types of turbines. These studies, however, do not provide the overall turbine structure idea which can be practically installed in the water channels. For real applications, a design with structural equilibrium needs to be considered, rather than focusing on the sole purpose of achieving high efficiency, by proposing an unrealistic arrangement of deflectors. By taking into account the discussed design aspects for the current turbine design, a structural arrangement can be proposed where the rotor with the rotating blades and the deflector is connected to the end plates as shown in
Figure 17.
These end plates can act as a stationary support structure, along with the deflector resting on the bed if the turbine is located at the channel bed for shallow water applications in the case of flat channel beds. For uneven channel beds, a foundation structure can be designed with the turbine structure attached to it by bolting, or any other suitable means. However, for deep water applications, a tethered system for a floating structure can be considered. From the overall analysis presented in this study, it can be stated that in order achieve the maximum performance, the turbine arrangement with a deflector oriented at 25° at the upstream of the blades operating at a TSR of 1.2 can harness power at an efficiency of 23% to 28%, depending upon the depth of operation, and in a flow velocity as low as 0.7 m/s.


 ,
, 


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}