Abstract
Excessive dependence on autonomous vehicles (AVs) may exacerbate traffic congestion and increase exhaust emissions in the future. The diffusion of AVs may be significantly affected by the public’s acceptance. A few factors that may affect people’s acceptance of AVs have been researched in the existing studies, one-third of which cited behavioral theories, while the rest did not. A total of seven factors with behavior theories are screened out that significantly affect the acceptance intention, including perceived ease of use, attitude, social norm, trust, perceived usefulness, perceived risk, and compatibility. Six factors without behavior theories are summed up that affect AV acceptance, namely safety, performance-to-price value, mobility, value of travel time, symbolic value, and environmentally friendly. We found that people in Europe and Asia have substantial differences in attitudes toward AVs and that safety is one of the most concerned factors of AVs by scholars and respondents. Public acceptance of the different types of AVs and consumers’ dynamic preferences for AVs are highlighted in the review too. The quality of literature is systematically assessed based on previously established instruments and tailored for the current review. The results of the assessment show potential opportunities for future research, such as the citation of behavior theories and access to longitudinal data. Additionally, the experimental methods and the utilization of mathematical and theoretical methods could be optimized.
1. Introduction
Sustainable transport is being promoted in many cities around the world to reduce environmental pollution, advocate social equity, improve happiness of residents, etc. However, the advent of autonomous driving technology is suspected by some scholars that it may disrupt this situation [1,2,3].
Nowadays, many cities are developing towards sustainability and intelligence. With the rapid development of the Internet of Things, cloud computing, new generation mobile bandwidth network and other technologies, the smart city system is gradually being formed. Smart cities foster an intelligent transportation environment which make it possible for the advent of autonomous vehicles (AVs), since autonomous driving has stringent demand for advanced technologies such as low latency network, cloud data services, high-sensitivity sensors [4,5], etc.
In the future, the transportation system may be more efficient and safer due to the emergence of new modes of travel, such as autonomous ridesharing, autonomous buses, autonomous shuttles [6,7], etc. AVs can obtain road warning and traffic information in real time through the V2X technology, which improves driving safety [8]. The V2X also enables in-car online entertainment, which gives passengers a comfortable trip [4]. The comfort of AVs may also be favored by those who commute by private cars, as it allows drivers to relax or work on the way. Some commuters may prefer to live in pleasant suburbs rather than urban areas, which may lead to changes in the structure of urban land [9,10]. AVs are also predicted to ease parking scarcity in the city center [10,11]. With the informatization and intelligence of transportation, autonomous driving may become a promoter of the construction of smart cities.
AVs are invented to drive without manual operation. Passenger travel experience may be improved in many ways, including leisure or productive activities [12], improving the mobility of unlicensed people [13], reducing traffic accidents [11], etc. However, every coin has two sides. Autonomous technology is also predicted to have some drawbacks, such as the aggravation of road congestion in the case of extra empty driving, the increase of energy consumption and greenhouse gas emissions due to increased mileage, the risk of being hacked, and so forth [5,14]. In a word, while AVs bring convenience to travelers, some negative traffic problems may also be caused due to excessive dependence. It has been unknown so far whether people will accept and use AVs heavily in the future.
The advantages and disadvantages of autonomous technology are coexisting, and it is rapidly developed. The advantages may be enhanced, and the disadvantages may be weakened in the process of AV development. The process of innovations diffusion may not always be smooth. Most technology acceptance studies suggest that new inventions are “good” and people should accept them for granted, which may be a prejudice [15,16]. The public may even resist innovations to keep them out of their minds. Some people may not accept AVs from their perspective, such as those who are driving for fun [6]. Moreover, some consumers would be motivated by status or trendiness rather than the intrinsic value of autonomous technology [17]. In other words, innovations seem to encounter certain kinds of people’s psychological obstacles in the diffusion process. Psychological obstacles come from the subversion of innovations to the stereotypes or perceived product image of individuals [18]. Many significant innovations fail to satisfy user requirements and get abandoned before their launch into the market [19].
Hence, quite a few scholars researched AV acceptance in recent years, which can provide necessary suggestions for technology developers and city managers, so that the autonomous technology can maximize the benefits of travelers and urban traffic. Two reviews of previous AV acceptance studies have been published. Becker and Axhausen [20] compared survey methods used in existing AV acceptance studies and discussed the heterogeneity of AV preference among different groups of people in their review. Gkartzonikas and Gkritza [21] reviewed the impact of population heterogeneity on AV acceptance, the differences in AV acceptance among a few study objectives, and different components that affect AV acceptance. However, to the best of our knowledge, few researchers have given a systematic review of psychological factors that affect the acceptance of AVs. Actually, different psychological factors are integrated by behavior theories to explain the acceptance of AVs in some existing papers. Studies without behavioral theories also take a few psychological factors as variables of the survey. Whether the utilization of behavior theories can better explain the acceptance of AVs has also not been discussed so far as we know.
This review aims to give a systematical review of the factors that affect the acceptance of AVs and compare the differences between studies that cite behavior theories and uncited behavior theories. Moreover, autonomous technology is still under development and cannot be determined for its future utilities. The tastes of consumers would also change over time [22]. People may have dynamic preferences for AVs, which is discussed in the review. Moreover, preferences for different autonomous products (such as autonomous bus and shared AVs) are also compared in the review.
We conducted a quality assessment of the collected literature. The weaknesses of literature are also discussed, and potential opportunities for further research were pointed out. Specifically, we aim to (1) contrast the impacts of psychological factors on AV acceptance in papers that utilize behavior theories, (2) compare the factors that affect AV acceptance in papers without behavior theories, (3) evaluate the level of theoretical and mathematical models used in studies, (4) compare papers with and without behavior theories, (5) assess the methodological quality of empirical studies.
2. Methodology
2.1. Subsection
The papers we arranged are from six databases following the PRISMA [23] guidelines: Science Direct, Web of Science, Academic Search Complete, TRID, Eric, and Cambridge Journals Online. They are all comprehensive and authoritative as well as well-known in the academic circles worldwide, which contain engineering, statistics, computer science, and transportation et al. We divide search words into two categories: (1) acceptance, willingness, adoption, preferences; (2) autonomous vehicle, automated vehicles, self-driving. Then, arranging each word in the first part and the second one in pairs to search and collect relevant literature as more as possible.
2.2. Inclusion and Exclusion Criteria
In order to be eligible for inclusion in the review, studies had to: (1) be published in a peer-reviewed English journal; (2) the study subjects must include, but are not limited to, at least one of the AVs, autonomous bus, autonomous shuttle and shared autonomous vehicles; (3) have at least one variable or attributes associated with AV acceptance; (4) present empirical studies; and (5) have at least one variable related to AVs as the dependent variable. The last search was made in February 2020, and we restricted the search to all literature published before that date. The oldest literature we found was published in May 2014 [24].
2.3. Data Extraction
Using the matrix method [25] to obtain a standardized data extraction table from the papers of the review. The information extracted from each of the literature reviewed includes study characteristics (study site, study design, study area, study duration, author), participant attributes (e.g., sample size, the nationality of respondents), theoretical framework or analysis methods, and main finds. In order to ensure the reliability of data extraction, the data in the 75 papers was first extracted by the first author. Then another researcher with research methods training experiences did the same job alone. Finally, the lists of data extraction results of them were compared and found that about 90% of the extracted data are coincident, which indicates the high interrater reliability in the data extraction process.
2.4. Quality assessment
The quality of literature included in this review was systematically assessed using a modified checklist, combining the methodological quality scale (MQS) and the theory utilization quality scale (TQS) in the review [23,26]. Three facets are contented in the checklist: (1) assessing data collecting methodological quality; (2) assessing theory utilization; (3) assessing methods utilization. The assignment range of data collecting method is 1–3 points, because the experimental methods and data categories are divided into three levels in the study. Theory utilization and processing methods are divided into binary evaluation levels to evaluate whether a research used a certain method.
To appraise the data collecting methodological quality at length, we modified the checklist and divided it into three items: research design, reasonable data acquisition path and reasonable choice of sample size. The study design comprises case-control study, longitudinal study, and cross-sectional study. The requirement to get three points is that the case-control method is used to study the effect of one variable on the experiment results, such as the intention difference between the respondents who experienced the AV simulator and those who did not. The reason for scoring is that influencing factors can be more intuitively reflected through case-control study [27]. The longitudinal data can reflect the change process of respondents, but the experiment may also be affected by the instability of the test group, so it is assigned two points. Cross-sectional study has a score of one, as this is a kind of relatively basic research method. The criteria of data acquisition paths are divided into three levels too. The real autonomous driving test allows respondents to experience the AVs directly, which can predict behavior intention more accurately than a single questionnaire. Therefore, the real AV experience is assigned three points, the autonomous driving simulator experience is assigned two points, and the questionnaire is assigned one point. The scoring mothed of the data acquisition path is similar to research design. The number of participants determines whether the survey is representative and scientific, so adequate sample size selection was listed as an indispensability indicator in the checklist. Innovation acceptance estimate models provide robust frameworks to understand the influence of multiple factors on adoption behavior under volitional control, allowing scholars to estimate individuals’ acceptance intention of AVs relatively accurately [28,29]. As a result, the utilization of behavior theories or relative theory frameworks is regarded as a scoring criterion in the review. It is the basis of research to allow respondents to understand the characteristics of AVs and collect their opinions accurately, so this is also included in the evaluation indicators. Finally, to analyze the data with the appropriate mathematical methods to make the results more convincing. Three scientific processing are included.
All papers were evaluated on eight criteria listed in Table 1. The possible range of evaluation scores was 3 to 14, with a higher number indicating better quality.

Table 1.
Criteria for assessing studies’ quality.
3. Results
The search and filter process is shown in Figure 1. After deleting the duplicate records, a total of 7947 unique records were found from the six databases and additional manual search. After screening titles and abstracts, 303 literatures were extracted for further evaluation. Additionally, 230 papers were excluded because their subjects were not relevant to acceptance, or not specifically for AV acceptance, or full-text is not available, or not based on empirical study. The reference lists of reviews excluded were reviewed, and potential papers were identified. Finally, 75 papers were accepted.
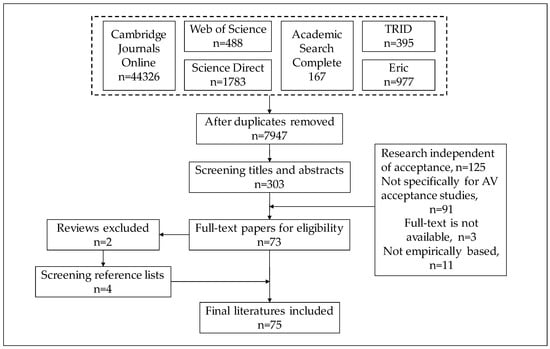
Figure 1.
The flowchart of the systematic review process.
3.1. Features of Reviewed Studies
Table 2 shows the necessary information of 75 papers, including the author of each article, data acquisition, sample size, and analytical method. All research data was obtained in the five years from 2013 to 2019, except for literature that did not indicate the time of the survey. Most studies have a sample size of more than 300, and a small number of studies with a sample size of less than 100 are based on experiments, such as [30]. The studies on AV acceptance have been slowly increasing from 2014 to 2019, and the number of surveys per year is 3, 2, 7, 11, 19 and 33.
Table 2.
Overview of studies.
3.2. Factors Accounting for AV Acceptance in Studies with Behavior Theories
Seven behavior theories were utilized in the papers we found, namely: the Technology Acceptance Model (TAM) [95], Theory of Planned Behavior (TPB) [96], Diffusion of Innovations Model (DIM) [97], Unified Theory of Acceptance and Use of Technology (UTAUT) [98], Theory of Reasoned Action (TRA) [99], Socio-ecological Model (SEM) [100], and Causal Model [101]. TPB and TRA provide a recognized theoretical basis for consumer behavior intention researches, especially in the prediction of people’s volitional behaviors, such as innovation acceptance. TAM and DIM are used in the study of acceptance intention across a wide range of information technologies [102,103]. TAM was derived from TPB and TRA, and it has been utilized broadly to study the acceptance behavior of vehicle technologies [104,105]. Moreover, Mortenson and Vidgen found more than 3000 publications citing TAM in their research as of 2015. These may be the reasons why TAM is frequently applied in AV acceptance studies. UTAUT was developed after empirically summarizing previous acceptance models [98]. UTAUT emphatically focuses on discovering the factors affecting the individuals’ acceptance intention, while SEM attempts to capture the interrelationships between individuals and their external environments [28,56]. Similarly, the causal model also involves the influence of social environment on behavior intention. Figure 2 shows the frequency of use of theories in the 75 papers.
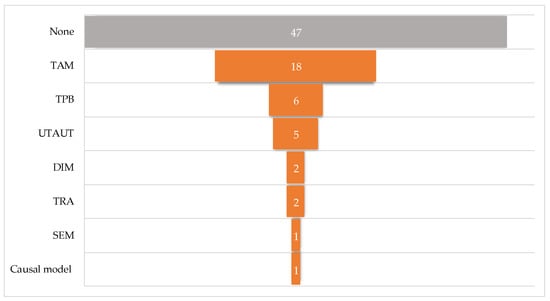
Figure 2.
The number of studies that cited behavior theories.
Figure 3 shows the number of papers that cited factors in behavior theories and the significance of psychological factors on AV acceptance intention. The significance is divided into four levels according to the p-value.
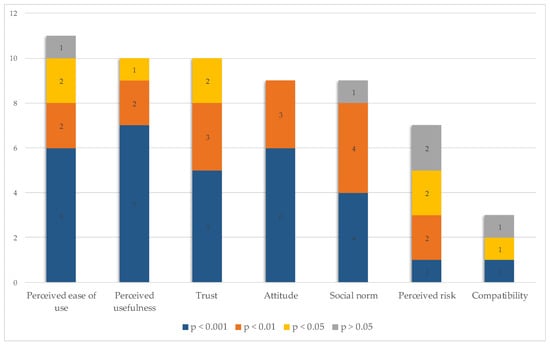
Figure 3.
The number of studies that cited factors in behavior theories.
3.2.1. Perceived Ease of Use
Perceived ease of use is one of the variables in the TAM, which can be defined as “to what degree people believe that using a particular system or technology could be free from physical and mental effort” [95]. Autonomous driving is a significant technical renovation of the automobile with an entirely different human-computer interaction mode from traditional ones, which may create some challenges for people to operate it in the future. A total of eleven were found in the literature we collected that have discussed it. Five of them reported that perceived ease of use is a direct predictor of acceptance intention [28,52,61,62,65]. More than that, Xu et al. [62] found that perceived ease of use has a great deal more effect on acceptance intention after the AV riding experience of respondents in the testing ground. Additionally, AJT [36] concluded that perceived ease of use indirectly affects acceptance intention through perceived usefulness and attitude. However, in an online survey of south Korean drivers, Choi et al. [33] got different conclusions. He concluded that respondents believed it is not hard to interact with AVs since they are familiar with the car. This may be because the respondents are all skilled drivers. Similarly, Zhang et al. [70] found that perceived ease of use is not a strong predictor of trust. This may be due to the fact that people have no experience riding AVs and it is difficult for them to estimate whether they have the ability to handle it, he explained. This speculation is consistent with Xu et al. [62]. In summary, people’s acceptance of AVs is probably to be affected by the difficulty of self-assessment of their use of AVs, it varies from person to person.
3.2.2. Attitude
Attitude can be defined as a psychological tendency that refers to the degree to which an individual likes and dislikes a particular entity [106]. Attitude regarded as a mediator of regulating belief and intention exists in both TPB and TAM [102]. Furthermore, Rogers [97] summarized that adoption decisions are determined by the overall attitude of potential users to innovations. Thus, the attitude has attracted particular attention from the studies of AV acceptance and has been certified to have a strong influence on people’s acceptance of the AVs [6,24,36,45,50,57,68]. Overall, respondents expressed a positive attitude towards AVs in literature. Especially in the research of AJT [36], he found that attitude is the most substantial predicting factor of people’s intention to drive AVs in their prediction model.
Moreover, Shuchisnigdha et al. [45] reported in their research that male has a more positive attitude than female. However, the following two conclusions are the opposite. Liu et al. [68] found that the positive attitude of young respondents toward AVs is stronger than that of the elderly, whereas the work of Hartwich et al. [47] revealed that elderly people have a strong positive attitude toward AVs. The former explained that elderly people are less willing to take risks than young people and do not think AVs will bring them benefits. In contrast, the latter explained that elderly people are more likely than younger ones to use assistive devices to compensate for their old age. The following two reasons may cause the distinction in attitude between the two of them. On the one hand, the driver’s license holding rate of elderly Chinese people is lower than that of developed countries, and most of them prefer to travel by bus or on foot rather than by private car [107]. Therefore, they have relatively little experience in driving and have a poor understanding of driver assistance systems. On the other hand, Liu et al. [68] conducted a questionnaire survey directly on the respondents in the study, while Hartwich et al. [47] invited the respondents to ride a driving simulator before the survey. The driving simulator allows respondents to experience the autonomous system more intuitively than the SP survey, which may be another reason why elderly Germans have a more positive attitude toward AVs in the study of Hartwich et al. [47].
3.2.3. Social Norm
Social norm is a key variable in the TPB, which can be defined as the person’s perception that other important influencers believe that he should or should not accept an innovation [99]. It is also named subjective norm [52] or social influence [51] in a few studies. When a certain kind of innovation is widely consumed, the impact of social norm on purchase intention can be stronger than that of the innovation that is being privately consumed [108]. Therefore, the acceptance of the emerging AVs is also likely to be affected by social norms, which attracts the attention of many scholars. A total of nine studies focused on the influence of social norms on intention are in the collected literature. Five of them reported that behavior intention is directly predicted by social norm [21,23,39,55,61].
Similarly, Acheampong and Cugurullo [28] founded that the adoption of AVs is indirectly affected by social norm through perceived ease of use and perceived benefits. Meaning that social norm as an antecedent affects people’s assessment of how easy it is to use AV and how useful AV is. The acceptance of AVs is directly affected by perceived ease of use and perceived benefits. Although Gkartzonikas and Gkritza [21] argued that social norm is a predictor of purchase intention, they did not explore the effect of social norm on other variables. Contrarily, a pair of opposite conclusions were founded. AJT [36] indicated that social norm has little effect on intention. He argued that it is difficult for respondents to abstractly imagine whether their behavior intention will be affected by others because AVs have not yet come into the market entirely, and they have less knowledge about that.
3.2.4. Trust
Trust appears in the Automation Acceptance Model, which is regarded as a key factor affecting human-computer interaction [109,110]. Trust was not valued in the early acceptance models. However, with the continuous development of computer and the popularization of robotics, trust in automation technologies has received more and more attention. [111]. We also found that it was introduced into AV acceptance studies. It was surveyed in ten papers we collected. Five of them reported that trust is a strong or strongest predictor of adoption intention [33,52,61,62,70], and that it was proved to directly or indirectly affect the intention. Specifically, trust not only directly predicts intention, but also indirectly affects it through perceived usefulness, perceived ease of use or perceived safety [52,61,62]. Similarly, Panagiotopoulos et al. [61] found that there is a significant correlation between trust and social influence. People with strong trust in AVs are less susceptible to social norm than low trustors. The correlation between trust and other external variables is nothing new [111], and the above discoveries prove this. Moreover, two groups reported in their studies that elderly have stronger trust in AVs than young [30,68,69], whereas Bansal et al. [12] got the opposite conclusion. Bansal et al. [12] added that the elderly are less willing to pay for AVs because of their low trust. It seems that the variety of trust among different age groups depends on the heterogeneity of samples. Therefore, trust in AVs may be an assessment of whether it is worth relying on, and this assessment will be influenced by the effectiveness and security of AVs, or by others.
3.2.5. Perceived Usefulness
Perceived usefulness is another antecedent of intention in the TAM, which can be defined as “the degree to which a person believes that using a particular system would enhance his or her job performance” [95]. The usefulness of autonomous driving can be achieved in the following ways. AVs allow users to travel by private car alone when they cannot drive. AVs can also obtain real-time road information through V2X so as to broaden their perception ability, which contributes to a smooth and safe travel [4]. Moreover, people may also carry out various activities such as online office and entertainment in AVs in the future [4]. The AV acceptance is intensely predicted by perceived usefulness, which was reflected in all the literature we have collected that studied perceived usefulness, with a total of ten studies. Two of them concluded that perceived usefulness is the strongest predictor in all psychological variables of their conceptual models [36,61], which shows that people maybe pay close attention to how much they can benefit from AVs. Similarly, Choi et al. [33] reported in their research that people may be more concerned about the usefulness of AVs than the ease of use. The finding of Choi et al. [33] may not be sufficient to prove that the predictive power of perceived usefulness for AV acceptance intention is stronger than that of perceived ease of use. The difference may be caused by the limitations of the SP survey, which has been explained in the previous paragraph.
Moreover, both perceived ease of use and perceived usefulness are essential external variables in the TAM and, they appear in pairs in all five founded papers. The evidence conforms to the trade-offs of decision-makers on costs and benefits [112]. Learning to operate AVs can be regarded as a kind of cost, while usefulness can be regarded as a kind of benefit. Respondents are allowed to self-assess two variables at the same time, which may be an accurate way to predict their intention. Therefore, respondents’ imagination of the question items corresponding to the two variables could be kept at the same level as possible in future research. AV experience may be one of the relatively intuitive research methods. Moreover, perceived usefulness and performance expectancy seem to be similar. Performance expectancy, one of the external variables of UTAUT, is defined as the extent to which a user believes that technology can bring her or his job performance [98]. To some extent, both two have the meaning of bringing benefits to users. The similarities and differences between the influence of perceived usefulness and performance expectancy on the acceptance intention can be compared in future research.
3.2.6. Perceived Risk
Perceived risk appears in the Causal Model [101], which has long been regarded as the main factor that reduces diffusion rates of innovations [18,97]. The risks of AVs include system reliability, data leakage, security related issues, and so forth. The risk of system reliability mainly refers to the reliability of the autonomous system. The technical level of autonomous driving is constantly improved through continuous development and testing. Technologies such as LTE-V2X and C-V2X communications are gradually maturing [113,114,115]. Especially after 5G communication enters the commercial stage, the perception of autonomous driving will be greatly improved [116,117]. However, with the improvement of technical level, the market requirement for the technical stability and reliability of autonomous driving is also continuously increasing. Data security refers to the misuse of personal information in the interactive process of the network of AVs. The leakage of private information may result in financial loss or security damage. It is not surprising that the risk of AVs has attracted public attention since it is unknown. The significance of perceived risk on acceptance intention was surveyed in a total of seven literatures we collected. Two of them reported that perceived risk is a strong direct predictor of acceptance intention and, perceived risk has a strong negative impact on intention [37,69]. In other words, people’s willingness to accept AVs declines with the increase of perceived risk. Similarly, it predicted to have indirect effect on acceptance intention through attitude [36].
Of interesting finding here was a pair of complementary conclusions followed. Perceived risk has a strong effect on trust [70]. In turn, trust negatively affects perceived risk [33]. These findings could be explained in that the more people that perceive the risk of AVs, the less they trust it, and the more they trust the AVs, the lower the perceived risk. Hence, perceived risk and trust seem to be strongly correlated. However, Liu et al. [67] found that the effect of perceived risk on acceptance is not so strong. People tend to tolerate a certain amount of risk for specified benefits, they explained. This may also be due to respondents’ insufficient knowledge about the risk of AVs. Additionally, Liu et al. [68] reported in another research that the perceived risk of the elderly is stronger than that of the young because risk tolerance varies with age. Moreover, in the research of passengers and pedestrians, passengers have a higher perceived risk of autonomous driving than human driving, while pedestrians have a lower perceived risk of autonomous driving than human driving [57]. The issue of priority of protection in an emergency may be a cause of this difference, which is a very controversial topic. It seems ridicules for a machine to decide the life or death of passengers and pedestrians. Overall, perceived risk, a psychological variable closely related to automobile safety, would affect people’s trust or acceptance of AVs to a certain extent in different groups of people.
3.2.7. Compatibility
Compatibility is accepted in DIM, which can be defined as the degree to which an innovation is perceived as consistent with the existing values, past experiences, and needs of potential users [97]. As a kind of innovation, AVs would change people’s existing travel habits and concepts. For example, the problem of determining the responsibility of accidents, the interaction between the passengers and the AVs etc., 95% of respondents believe that AVs can be well integrated into existing transportation systems, whereas the rest expressed their concerns due to lack of experience with AVs [45]. Similarly, Kyriakidis et al. [34] found that people who use driver assistance systems are more willing to accept AVs, which means that the user’s past behavior would predict future behavior intention. Moreover, compatibility has proven to have a strong positive effect on the perceived usefulness of AVs, while it also has an indirect impact on attitude and intention [36]. Compatibility has not been adequately studied in the papers reviewed until now, but it is likely to be an essential factor affecting the diffusion of AVs. That it is not conformable with people’s lifestyle may become one of the reasons for an innovation to be resisted [18]. Moreover, the interaction of pedestrians, vehicles, and infrastructure may also be changed due to the joining of AVs [45,118]. Compatibility could be valued in future research.
The above seven factors that affect the acceptance of AVs are showed and discussed in the present, but by no means limited to these. Factors such as perceived benefit and perceived behavioral control are not widely cited in the literature we gathered, but they do have some role to play. Acheampong et al. [28] found that perceived benefit has a close correlation with pro-collaborative consumption attitude and pro-environmental attitude. Perceived behavioral control, expressed by constraints on behavior, is proved to be a direct predictor of behavioral intention and has a strong correlation with subjective norm [28,52]. Moreover, although there may be other psychological factors that are not of interest to scholars that affect the acceptance of AVs, factors that have been paid attention to or not paid attention to can be roughly divided into three categories: personal motivation, external influence, and resource conditions. Personal motivation comes from the expectation that AVs can meet one’s needs, such as perceived usefulness. External influence refers to the impact of other individuals or public communication. Resource conditions refer to either the difficulty of using AVs or the compatibility of AVs with existing traffic elements. Individuals’ acceptance of AVs would be affected by these three different sources according to the existing studies.
3.3. Factors Accounting for AV Acceptance in Studies without Behavior Theories
Not all collected studies are based on behavior theories, but most of them also explored a few psychological or environmental factors. These factors are strictly distinguished and summarized. While advances in new products and technologies could improve experiences, their uncertainty and potential side effects may be unsettling to the public until people have sufficient knowledge about them [18], such as concerns about factors including safety issues, investment risks, and so forth. We screen out safety, performance-to-price value, mobility, value of travel time, symbolic value, and environmentally friendly in the review. The reason for the selection is that they are the top six most discussed factors in studies without behavior theories. The occurrence frequency of these six factors is shown in Figure 4.
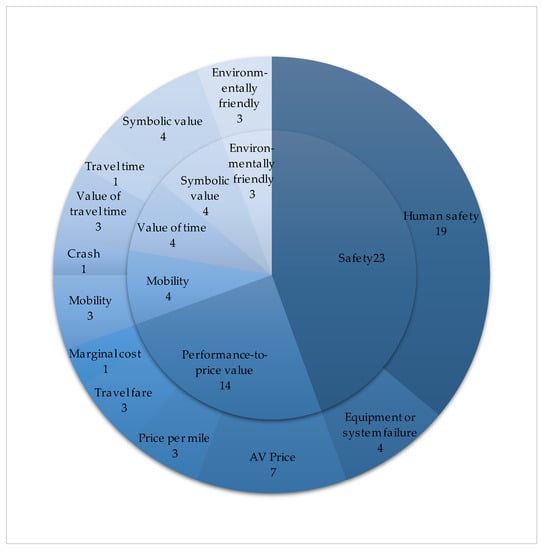
Figure 4.
Factors accounting for AV acceptance in studies without behavior theories.
3.3.1. Safety
Safety is the most frequently occurring word in all of the collected literature. A large number of consumers expressed safety concerns in their reports [37,51,71]. Safety is one of the main factors that people consider when choosing a certain car [119]. Some respondents even estimate that autonomous driving is not as safe as human driving [72]. Hence, they are more willing to accept AVs with manual driving options than fully AVs without steering wheels [28,45]. The deaths of AVs accidents reported in recent years may intensify public suspicion about the safety issues, and safety concerns have proven to be a potential deterrent to the acceptance of AVs [58]. Similarly, Piao et al. [35] found in their research of autonomous buses that safety is the most concerned issue of respondents when there is no human driver in the cabin and, autonomous buses cannot handle the conditions between passengers in the cabin like human drivers. Generally, it is not difficult to find that people have great concerns about the safety of the AVs maybe because the issue is not mature enough, and the public does not have enough knowledge about it.
3.3.2. Performance-To-Price Value
Performance-to-price value may be in consideration when choosing a family car, specifically the purchase price, fuel expense, and maintenance expense [120]. If an innovation has a poor performance-to-price value compared with product substitutes, the majority of consumers may not be willing to purchase it [18]. At first, the price of AVs will probably be higher than that of traditional cars. How many consumers are willing to pay for AVs? The answers to the question may help to AVs’ pricing in the future. Shabanpour et al. [60] found that users are more concerned about the price of AVs compared to other attributes. Similarly, Talebian et al. [46] also predicted that only when the price drops by a certain percentage (e.g., 15% or 20%) every year, the number of AV will gradually rise in urban traffic. The study of Kyriakidis et al. [34] found that about 5% of respondents would be willing to pay for an AV of more than $30,000, and that 40% expected that a fully automated car would cost $5000–9999 on top of a regular car. People’s willingness to buy AVs refers to whether they are willing to pay for the autonomous driving technology and how much they are willing to pay for the new experience brought by the increase of the marginal cost. Haboucha et al. [10] suggested that the price of AVs is not important, but more importantly, the relative price between AVs and conventional vehicles.
Besides, autonomous technologies may also provide a variety of services in addition to private autonomous cars, such as shared autonomous vehicles (SAV) and autonomous buses. Eighty percent of respondents in Austin are reluctant to pay for SAV services at a higher cost than current car-sharing companies in the research of Bansal et al. [12], and the people who live in dense area have more intention to use SAV even at $2 and $3 per mile because of low ownership of private car and insufficient parking space [12]. The fare of autonomous buses would be cheaper than SAV. There is no driver in the autonomous bus, which saves the expenses of wages so that the fare would be more attractive than ordinary buses. Piao et al. [35] suggested that people would prefer autonomous buses if both autonomous and ordinary on a route. For low-income people who make up a large percentage of the population, they may first come into contact with public service AVs instead of autonomous private cars when AVs are available. Therefore, the study of willingness to pay for a variety of autonomous vehicles could be enhanced in the future.
3.3.3. Mobility
The mobility of users would be enhanced when the AVs are available. This means that people would be allowed to use the AVs under an unavailable situation. As an example, although drivers are prohibited from drunk driving, they could take themselves home as the release of drive behavior via AVs. Payre et al. [24] found that 71% of the respondents would like to use AVs during the situation of injury or disease. Additionally, 31% of drivers in Europe acknowledged that they are used to drunk driving, although only a little [13], who would have more inclination to embrace the AVs than others. Not limited to the drunk situation, drivers’ mobility could also be improved when they are ill, disabled, their driver licenses are not available, and so forth. Additionally, the travel needs of the elderly are also receiving more and more attention. In some regions with poor public transport services, it is very inconvenient for the elderly to come out. The elderly could also travel at their own pace without the care of their children when the AVs are available, which greatly increases the acceptance of AVs [9].
3.3.4. Value of Travel Time
The saving of value of travel time is another advantage besides being hands-free. Users are allowed to deal with other things on their trips because of the autonomous system, which entails the reduction of value of travel time [121,122]. Nevertheless, this feature is not of concern to all users. Berg et al. [123] reported that the lower the person’s value of time, the less willing they are to pay the marginal cost of AVs. In contrast, the person with a higher value of time would be more willing to spend money on AVs, owing to it allow them to work while traveling, just like business people working online on trains. Meaning that the increased marginal cost may be insignificant compared to improved work efficiency for them. Haboucha et al. [10] supposed that long commuters tend to prefer AVs because they can use the commuting time that would otherwise be wasted to do some productive task. Noruzoliaee et al. [124] also found that when choosing between human-driven vehicles and AVs, users with a high value of travel time were more concerned about the saving of value of travel time of AVs than those with a low value of travel time. Moreover, people could move to a cheaper area farther away from the downtown and could be productive [9]. In other words, whether users are willing to spend money in exchange for the saved value of travel time may be determined by the heterogeneity of individuals’ value of travel time.
3.3.5. Symbolic Value
Symbolic value can be regarded as a kind of self-identity, meaning that consumers can reflect and communicate their social and personal identity when they own or use innovations [125]. It has been established that cars are seen as expressions of social status and power [126]. Several scholars have studied whether self-identity affects consumer acceptance of autonomous driving. Panagiotopoulos et al. [61] reported in their research that individuals would be affected by the social environment and use AVs to highlight their social status. Moreover, individuals tend to keep up with the trends in social media. Their trendiness could be revealed through the using of innovations, so some respondents are willing to accept AVs [9]. As an opposite discovery, symbolic value is predicted to have no strong effect on acceptance intention in the study of AJT [36]. AVs may not meet the needs of those who have the pursuit of driving pleasure, he explained. The symbolic value of private cars is common in many areas [127,128,129] and people in different nations have different degrees of emphasis on it due to differences in cultural background. Individuals’ image can be established through symbolic consumption [130]. The object of consumption can be expensive or an avant-garde product, etc. Some consumers may purchase an AV for symbolic value after it enters the market in the future. Nevertheless, the study on the people’s symbolic attitude of AVs is still rare. Future research could focus on this characteristic.
3.3.6. Environmentally Friendly
The AVs would reduce greenhouse gas emission and improve fuel economy, which reflects that AVs are more environmentally friendly than non-autonomous vehicles [35,131]. On the contrary, some scholars predict that AVs may have higher mileage due to empty driving, which would generate more energy consumption or emissions [5,14]. Since high-level AVs have not been widely used, it is difficult to predict whether they will be more environmentally friendly than conventional cars in the future. However, this attribute is still valued by individuals who care about the environment. In an investigation of the consumers who have purchased electric vehicles, Berliner et al. [66] found that the respondents expected that AVs would be as environmentally friendly as electric vehicles, which is one of the essential reasons for their acceptance of AVs. Environmental concern positively affects AV acceptance, which is similar to the founding of Gkartzonikas and Gkritza [21], as people with a higher quality of life are more concerned about environmental issues, and this kind of environmental concern would positively affect them to choose autonomous vehicles [65]. Overall, autonomous driving is likely to be environmentally friendly for a single trip. The negative impact of the environment brought by the increased mileage may be largely determined by people’s travel demand in the future.
3.4. The Acceptance of Autonomous Related Products
The service form of AV technology is diversified, and it could play a role in many different types of transport vehicles. Passengers may ride in AVs on many occasions in the future. As an example, commuters would take AVs buses to commute [7], students would take autonomous shuttles to classes on campuses [48], and the elderly or children would book shared autonomous vehicles (SAVs) for daily trips [6,12].
Buses are one of the lowest-priced public transportation, and autonomous buses are further reduced in operating costs because they do not require human drivers. Meanwhile, the operational errors of human drivers can be reduced, which enhances the security of buses. Piao et al. [35] reported in their survey in La Rochelle that only one-quarter of respondents believe that the security of autonomous buses is better than that of human-driven coaches, whereas Portouli et al. [7] founded in Trikala that respondents think that autonomous buses are a little safer than conventional buses. What contributes this difference may be the disparity of running speeds, routes, and traffic conditions of the two city autonomous buses. Whether there is an operator on an autonomous bus is also an essential factor. National differences in the understanding of AVs may be one of the reasons, too [34].
The autonomous ambulance could improve the shortage of medical providers by eliminating the need for human drivers which allow adequate care for the injured [49]. Moreover, if autonomous driving is better than human drivers in the future, then autonomous ambulances may be able to get injured people to hospitals faster and safer than human-driven ambulances, which is an excellent gift for some wounded people in urgent need of emergency treatment. However, Winter et al. [49] reported in their research that respondents are reluctant to accept autonomous ambulances compared to traditional ones. Individuals still do not trust autonomous technology at the moment in the urgency of their lives, they guess. We only found one research on the acceptance of autonomous ambulances under our best efforts, so this topic still needs to be studied more in the future.
Another form of service that autonomous technology can offer in the future may be shared autonomous vehicle (SAV). SAVs offer short-term, on-demand rentals with self-driving capabilities, which seems like a driverless taxi [12]. Bansal et al. [12] found that high-income males living in urban areas are more willing to use SAVs. On the contrary, elderly individuals have less interest in SAVs, probably because they feel that it is hard to learn to use SAVs. Then, Webb at al. [132] found that commuters and young couples have more interest in SAVs. However, couples with children are less willing to do so, probably owing to their consideration of security and policy issues. Furthermore, travel habits also affect the acceptance of SAVs. Haboucha et al. [10] found that individuals who rarely transit with public transportation have less interest in SAVs. Then, Krueger et al. [6] also found that day-to-day travel habits would greatly determine the willingness to use SAVs. Improving public transport and carsharing systems may be a way to attract people to accept SAVs [10].
3.5. Dynamic Preference
The user’s preferences for AVs would change over time. On the one hand, the users’ decisions are affected by the uncertainty of future consumption utility [22]. This may be because people are unwilling to take risks to try new technologies and prefer to continue using existing products. AV technology is developing rapidly at present and, high-level AVs have not entered the market, which has led to little knowledge of AVs. As a result, preferences toward AVs may change with market penetration, technological developments, government policies, pricing, and so forth. In other words, users’ preferences are flexible. Individuals who enter the market at a different point in time are expected to have different preferences. Therefore the preferences of consumers may vary over time [97]. On the other hand, users’ tastes change with age. Future decisions may not commit people’s past intentions as they age [22], and besides, preferences of AV would change due to media promotion or others’ evaluation of driving experience [46].
Hence, the reference value of early studies on the acceptance of AVs seems to lose gradually. However, if it is possible to re-interview the same respondents several years later, and then compare the preferences before and after to reflect the dynamic preferences of autonomous driving technology, it would be beneficial.
3.6. Quality of Reviewed Studies
The quality of the reviewed literature is varied with scores ranging from 3 to 14, as shown in Table 3. The table illustrates that only five studies of all were conducted through a case-control method. It is worth mentioning that no study has longitudinal data, which may need to be supplemented in future research. In the evaluation of data acquisition methods, 85.3% of the studies only conducted questionnaire surveys, such as approaches of AV ride experience [62], autonomous driving simulator [52], and categorizing interviews [43]. Studies using these methods obtained higher scores in the study design section, but the ratio is not high. The percentage of studies that have a large sample accounting for 72%. Reflecting that most studies have a certain degree of representation. As for theory utilization, most of studies (89.3%) have demonstrated the attributes of AVs in detail and researched the psychological or external factors that affect people’s acceptance of AVs. However, the percentage of studies that citing behavior theories is not high, account for 34.7%. Even so, most studies that did not refer to theoretical models have surveyed several psychological variables. Finally, studies that mathematically process data (88%) and calculate correlations between different factors (85.3%) account for the majority, but only 41.3% carried out a parameter selection reliability test. We can conclude that not every literature study the acceptance of AVs through scientific experiments and reasonable data processing, so there is still much room for methods improvement.
Table 3.
Distribution of quality characteristics across reviewed studies.
4. Discussion
Literature was summarized and critically assessed to sort out the factors that influence people’s acceptance of AVs. To the best of our knowledge, this may be the first systematic review evaluating the quality of empirical studies on people’s acceptance of AVs. A detailed assessment of the literature presents several empirical, methodological, theoretical issues, and factor issues.
4.1. Empirical Issues
The preferences for AV attributes are heterogeneous in different regions and, the psychological factors of car consumers have a cross-cultural difference. As an example, in China, the private car is not only a means of conveyance, it is also regarded as symbols of wealth and status because of the deep-rooted face culture [133]. The rapid growth of the automobile market is under the background of China’s rapid economic growth in the past 20 years, while the purchase of automobiles is influenced by its unique social and cultural influences, which is different from the “Path-dependence” of western countries [129]. We also found the difference in attitude toward AVs between countries. Hence, people in different countries may have variable points toward AVs. Most of the existing literature (n = 75) we have collected on AV acceptance was conducted in developed countries. In total, 33 of the 75 literature are in Europe, 26 in North America, 21 in Asia, 2 in Oceania and 1 in Africa. Four of them are cross-country studies. Therefore, AV acceptance research in developing countries, such as some countries in Asia and Africa, could be paid more attention, and more prospective and intervention research with factors that affect AV acceptance may be needed. Most of the studies were cross-sectional, which is impossible to infer the quantitative impact of the findings on future policies or guidance measures, suggesting that evidence from intervention studies is crucial. Last but not least, with a long way to go before high-level AVs enter the market, people may have dynamic preferences as AV develops. Hence, a longitudinal survey could be carried out by research.
4.2. Methodological Issues
In order to accurately measure the impacts of various factors on AV acceptance, a matching mathematical model needs to be established. After summing and commenting on the statistical methods of the 75 literatures, it was found that correlation analysis and regression analysis were most used. Correlation analysis pointed out the statistical relationship between two random variables, and their correlation coefficient could not reflect the causality between the single index and the whole. Similarly, the structural equation model is also widely used in existing studies. The structural equation model is a method of establishing, estimating, and examining causal relationship model. The model contains observable variables and potential variables that cannot be observed directly. In general, the structural equation model can replace multiple regression, factor analysis, and covariance analysis and analyze the effects of individual indexes.
4.3. Theoretical Issues
The studies of theory utilization (n = 26) among the literature are not the majority. The rigorous evaluation of the existing AV acceptance research literature is to distinguish between those who are not strict with the survey design, the model method is not completely correct, and there is no theoretical framework. In addition to the theoretical frameworks mentioned in the 75 literatures, the researchers also proposed some theoretical models to predict and explain the attributes and psychology that affect the individuals’ acceptance of AVs. In addition to several existing technology acceptance models, such as TPB and TAM, scholars also extended the existing models, such as UTAUT-extended model [29,47], TAM-extended model [50,61,70], Car Technology Acceptance Model [134]. Or some scholars extracted the variables from several models and integrated a new model [28,36,67]. Although the technology acceptance model could explain the acceptance intention, it does not mean that the research without the reference model is unscientific.
Some early studies on the acceptance of AVs were mainly focused on some primary psychological factors, such as perceived risk, attitude, and so forth. With the in-depth exploration of this topic, some behavioral theories and more advanced analytical methods are applied. Generally, multiple psychological variables included in behavioral theories, which regarded as possible determinants of behavioral intention. The introduction of behavioral theories also enables scholars to gradually discover the internal correlation between psychological variables, which guarantees the presentation of reasonable and profound conclusions. As an example, AJT and Acheampong [28,36] integrated variables from three different behavioral theories to explore the acceptance of AVs, which leads to the high explanatory power of the model. Both of them discussed the multiple influences of acceptance intention and reached a variety of conclusions, including policy, environment, and individuals through rigorous mathematical processes.
About two-thirds of studies that did not cite behavioral theories placed focus mainly on single or several factors or discussed differences in acceptance between social demographic attributes. Quite a few significant factors affecting the acceptance of AVs were founded too. For example, Hulse et al. and Liu [57,69] both deeply researched people’s perception of various aspects of risk in AVs, and concluded that the perceived risk has a significant negative impact on the acceptance intention. Some of their findings are similar to those that cited behavior theories that contain perceived risk. As another example, in the research of Payre et al. [24], 67% of the intention of AVs was explained by three psychological factors, including attitude, contextual acceptability, and driving sensation seeking. This figure is higher than that of two studies, which extended TAM (61% and 55% respectively) [62,70]. From a quantitative perspective, the quotation of behavior theory maybe not the determining factor of research quality. It should be noted that in future research, whether to adopt behavior theories could be determined according to the research object, research purpose, or other terms.
4.4. Factor Issues
Combining the factors in the studies with behavior theories, a theoretical framework is proposed as shown in Figure 5. A solid line with a single arrow implies a significant influence relationship between two variables that have been demonstrated. The interactions between variables have been discussed in detail in Section 3. The proven relationship is the basis of the theoretical framework of AV acceptance intention. A double arrow solid line indicates two-way effects between two variables in different studies. A dotted arrow indicates a possible relationship that has not yet been studied. The framework maybe provides further research an initial strategy for reference. Compatibility is shown to has a significant positive association with trust in the adoption intention studies of bank service and relationship marketing [135,136,137]. Perceived ease of use is regarded as a strong predictor of perceived risk in the studies of intention to use social media [138,139]. Hence, two dotted arrows are added to the theoretical framework, which could be further explored in future research. Moreover, the factors in papers without behavior theories are found to have less relationship between each other than that of factors in studies with behavior theories, and almost all of them are directly direct to acceptance intention.
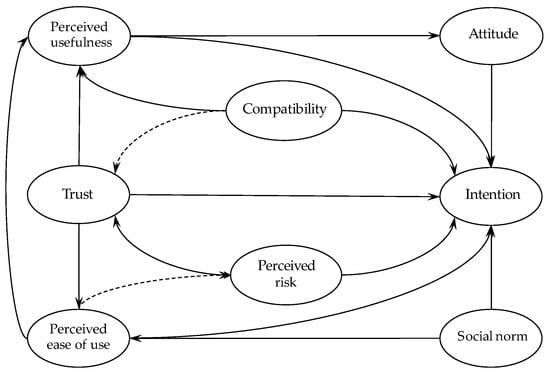
Figure 5.
The conceptual theoretical framework.
4.5. Limitations and Strengths
The review is not without limitations. First, the eligible literature must be published in English, which makes it impossible to select the relevant literature published in other languages. Second, certain psychological variables from different behavior theories are easily confused, such as perceived benefits and perceived usefulness. They cannot be treated the same, even though they are very similar. Hence, we only focus on perceived usefulness. Future research should be especially careful when comparing and discussing the psychological variables in different literature. Third, the review of the psychological factors and AV attributes affecting the acceptance is based on Rogers’ innovation resistance theory. The purpose is to find out as much detail as possible what is affecting AV acceptance. Of course, the future study can also focus on socio-demographic attributes to research the heterogeneity of attitudes towards AVs among different groups. Fourth, the sample size as one of the criteria to assess the quality of literature has limitations. The difference in the size of the sample size does not fully reflect the quality difference between different studies, as each survey has different methods (such as randomized control group trial vs. online questionnaire). The sample size is meaningful only when comparing studies using the same type of research method. Therefore, the twenty-one studies with a sample size of less than 300 cannot be regarded as inadequate for this reason. The strengths of the review cannot be ignored. One is that all literature is rigorously screened in six databases based on the inclusion/exclusion criteria defined above, and the other is to assess the quality of the listed literature in a standardized manner.
5. Conclusions and Possible Future Works
Autonomous driving is developing rapidly, and at present it is probably at the L3 stage. Some optimistic remarks are predicting that L5 AVs may appear in 2030s [83,140]. Autonomous driving is expected to bring benefits such as ease of traffic congestion and independent mobility. Autonomous driving, as we wish, promotes the city to be intelligent and sustainable, which could take even longer.
The sustainable development of transportation may fluctuate after the widespread use of AVs in the future. Public acceptance of AVs may be one of the factors influencing the diffusion of AVs. This review aims to comprehensively summarize the factors that affect AV acceptance. These factors can be regarded as the entry point for further research. The correlation between psychological variables deserve to be explored through the structural equation model and related behavioral theories too. Not all innovations are well accepted, and sometimes they are subject to human resistance. Therefore, we focus on two facets of affect acceptance proposed by Ram and Sheth [18]. One is the psychological factors of personality, and the other is the attributes of innovation itself. Then we developed an inclusion/exclusion search strategy and compiled a total of seventy-five literature on AV acceptance. These articles are then evaluated according to MQS and TQS. Finally, psychological variables and AV attributes that affect AV acceptance were extracted and sorted out from seventy-five literatures.
The safety, financial, and service attributes impact on AV acceptance is generally found to be significant, including data security, personal safety, marginal cost, mobility, environment-friendly, ride comfort, self-identity, value of travel time. All these attributes have positive or negative effects on AV acceptance to a certain extent. As for psychological factors, all the psychological variables we reviewed have proven to be predictors of acceptance intention. The effect of the variables on the acceptance may be direct or indirect. In other words, there are complex interactions between variables. Future research can focus on continuing to find new psychological variables or multiple correlations between variables.
A few important variables can be further studied, including compatibility, face awareness, dynamic preferences, etc. There are cultural differences and transport infrastructure level differences between different countries. One innovation that do not adapt to local conditions are difficult to promote. Therefore, compatibility could be further studied in different regions. As a kind of relatively expensive consumer product, automobile can reflect a person’s economic strength and make people feel face-saving. In particular, AVs are likely to be more expensive than traditional cars in the early stages of the market. Face awareness could also be regarded as an important factor affecting the acceptance of AVs in the future works. People’s acceptance of AVs is not static, and it may show dynamic preferences with the development of AVs. A longitudinal survey can be conducted in the future, which may be an opportunity and a challenge. The preferences for the above attributes are mostly heterogenous and can partially be accounted for by various individual-specific characteristics.
The research on the acceptance of autonomous driving for special groups is not deep enough, including the elderly, the disabled, children, etc. The issue of travel of the elderly has always attracted the attention of society and academia. The advent of autonomous driving may help increase mobility for older people. Older people’s trust in AVs has been shown to be higher than that of young people, while they may have difficulty operating autonomous vehicles. [30,68]. The acceptance of AVs by the elderly could be further focused on. Similarly, groups like children and disabled people who need special care when traveling may also benefit from AVs. A large amount of social resources that originally invested to help special populations may be saved due to AVs too. Therefore, the research on their acceptance of AVs may be very meaningful and could be further paid attention in the future, and in order to avoid intention deviation as much as possible, they should be introduced in detail to the specific utility of AVs during the survey. Few studies in developing countries are founded in other than China or India, and future research could compensate for this regional imbalance.
Author Contributions
Conceptualization, P.J. and G.X.; methodology, G.X.; validation Y.C. and Y.S.; data curation Y.C., Y.S. and F.Z.; writing—original draft preparation, G.X.; supervision, P.J. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Natural Science Foundation of China, grant number 71871107.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Bahamonde-Birke, F.J.; Kickhöfer, B.; Heinrichs, D.; Kuhnimhof, T. A systemic view on autonomous vehicles: Policy aspects for a sustainable transportation planning. Plan. Rev. 2018, 54, 12–25. [Google Scholar] [CrossRef]
- Greenblatt, J.B.; Shaheen, S. Automated vehicles, on-demand mobility, and environmental impacts. Curr. Sustain. Renew. Energy Rep. 2015, 2, 74–81. [Google Scholar] [CrossRef]
- Papa, E.; Ferreira, A. Sustainable accessibility and the implementation of automated vehicles: Identifying critical decisions. Urban Sci. 2018, 2, 5. [Google Scholar] [CrossRef]
- Liu, Z.; Lee, H.; Ali, G.; Pesch, D.; Xiao, P. A Survey on Resource Allocation in Vehicular Networks. arXiv 2019, arXiv:1909.13587. [Google Scholar]
- Spieser, K.; Treleaven, K.; Zhang, R.; Frazzoli, E.; Morton, D.; Pavone, M. Toward a Systematic Approach to the Design and Evaluation of Automated Mobility-on-Demand Systems: A Case Study in Singapore. In Road Vehicle Automation; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Krueger, R.; Rashidi, T.H.; Rose, J.M. Preferences for shared autonomous vehicles. Transp. Res. Part C 2016, 69, 343–355. [Google Scholar] [CrossRef]
- Portouli, E.; Karaseitanidis, G.; Lytrivis, P.; Amditis, A.; Raptis, O.; Karaberi, C. Public attitudes towards autonomous mini buses operating in real conditions in a Hellenic city. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 571–576. [Google Scholar]
- Meneguette, R.I.; De Grande, R.; Loureiro, A.A. Intelligent Transport System in Smart Cities; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Zmud, J.P.; Sener, I.N. Towards an understanding of the travel behavior impact of autonomous vehicles. Transp. Res. Procedia 2017, 25, 2500–2519. [Google Scholar] [CrossRef]
- Haboucha, C.J.; Ishaq, R.; Shiftan, Y. User preferences regarding autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2017, 78, 37–49. [Google Scholar] [CrossRef]
- Fagnant, D.J.; Kockelman, K. Preparing a nation for autonomous vehicles: Opportunities, barriers and policy recommendations. Transp. Res. Part A Policy Pract. 2015, 77, 167–181. [Google Scholar] [CrossRef]
- Bansal, P.; Kockelman, K.M.; Singh, A. Assessing public opinions of and interest in new vehicle technologies: An Austin perspective. Transp. Res. Part C 2016, 67, 1–14. [Google Scholar] [CrossRef]
- Antov, D.; Banet, A.; Barbier, C.; Bellet, T.; Bimpeh, Y.; Boulanger, A.; Brandstätter, C.; Britschgi, V.; Brosnan, M.; Buttler, I.; et al. European Road Users’ Risk Perception and Mobility: The SARTRE 4 Survey; IFSTTAR: Paris, France, 2012. [Google Scholar]
- Harb, M.; Xiao, Y.; Circella, G.; Mokhtarian, P.L.; Walker, J.L. Projecting travelers into a world of self-driving vehicles: Estimating travel behavior implications via a naturalistic experiment. Transportation 2018, 45, 1671–1685. [Google Scholar] [CrossRef]
- Rogers, E.M. New product adoption and diffusion. J. Consum. Res. 1976, 2, 290–301. [Google Scholar] [CrossRef]
- Sheth, J.N.; Stellner, W.H. Psychology of Innovation Resistance: The Less Developed Concept (LDC) in Diffusion Research; College of Commerce and Business Administration, University of Illinois at Urbana-Champaign: Urbana-Champaign, IL, USA, 1979. [Google Scholar]
- Anania, E.C.; Rice, S.; Walters, N.W.; Pierce, M.; Winter, S.R.; Milner, M.N. The effects of positive and negative information on consumers’ willingness to ride in a driverless vehicle. Transp. Policy 2018, 72, 218–224. [Google Scholar] [CrossRef]
- Ram, S.; Sheth, J.N. Consumer resistance to innovations: The marketing problem and its solutions. J. Consum. Mark. 1989, 6, 5–14. [Google Scholar] [CrossRef]
- Story, V.; O’Malley, L.; Hart, S. Roles, role performance, and radical innovation competences. Ind. Mark. Manag. 2011, 40, 952–966. [Google Scholar] [CrossRef]
- Becker, F.; Axhausen, K.W. Literature review on surveys investigating the acceptance of automated vehicles. Transportation 2017, 44, 1293–1306. [Google Scholar] [CrossRef]
- Gkartzonikas, C.; Gkritza, K. What have we learned? A review of stated preference and choice studies on autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2019, 98, 323–337. [Google Scholar] [CrossRef]
- Sadowski, P.; Krishna, V. Dynamic Preference for Flexibility. Econometrica 2014, 82, 655–703. [Google Scholar] [CrossRef][Green Version]
- Moher, D.; Liberati, A.; Tetzlaff, J.; Altman, D.G. Preferred reporting items for systematic reviews and meta-analyses: The PRISMA statement. Ann. Intern. Med. 2009, 151, 264–269. [Google Scholar] [CrossRef]
- Payre, W.; Cestac, J.; Delhomme, P. Intention to use a fully automated car: Attitudes and a priori acceptability. Transp. Res. Part F Psychol. Behav. 2014, 27, 252–263. [Google Scholar] [CrossRef]
- Garrard, J. Health Sciences Literature Review Made Easy: The Matrix Methods, 2nd ed.; Jones and Barlett Publishers: Sudbury, MA, USA, 2006. [Google Scholar]
- Lu, W.; Mckyer, E.L.J.; Lee, C.; Goodson, P.; Ory, M.G.; Wang, S. Perceived barriers to children’s active commuting to school: A systematic review of empirical, methodological and theoretical evidence. Int. J. Behav. Nutr. Phys. Act. 2014, 11, 140. [Google Scholar] [CrossRef]
- Ferrari, E.; Chevallier, T.; Chapelier, A.; Baudouy, M. Travel as a risk factor for venous thromboembolic disease: A case-control study. Chest 1999, 115, 440–444. [Google Scholar] [CrossRef] [PubMed]
- Acheampong, R.A.; Cugurullo, F. Capturing the behavioural determinants behind the adoption of autonomous vehicles: Conceptual frameworks and measurement models to predict public transport, sharing and ownership trends of self-driving cars. Transp. Res. Part F Traffic Psychol. Behav. 2019, 62, 349–375. [Google Scholar] [CrossRef]
- Madigan, R.; Louw, T.; Wilbrink, M.; Schieben, A.; Merat, N. What influences the decision to use automated public transport? Using UTAUT to understand public acceptance of automated road transport systems. Transp. Res. Part F Traffic Psychol. Behav. 2017, 50, 55–64. [Google Scholar] [CrossRef]
- Gold, C.; Körber, M.; Hohenberger, C.; Lechner, D.; Bengler, K. Trust in Automation—Before and After the Experience of Take-over Scenarios in a Highly Automated Vehicle. Procedia Manuf. 2015, 3, 3025–3032. [Google Scholar] [CrossRef]
- Schoettle, B.; Sivak, M. A Survey of Public Opinion about Autonomous and Self-Driving Vehicles in the US, the UK, and Australia. In Proceedings of the 2014 International Conference on Connected Vehicles and Expo (ICCVE), Vienna, Austria, 3–7 November 2014; pp. 687–692. [Google Scholar]
- Schoettle, B.; Sivak, M. Public Opinion about Self-Driving Vehicles in China, India, Japan, the US, the UK, and Australia; University of Michigan, Ann Arbor, Transportation Research Institute: Ann Arbor, MI, USA, 2014. [Google Scholar]
- Choi, J.K.; Ji, Y.G. Investigating the Importance of Trust on Adopting an Autonomous Vehicle. Int. J. Hum. Comput. Interact. 2015, 31, 692–702. [Google Scholar] [CrossRef]
- Kyriakidis, M.; Happee, R.; Winter, J.C.F.D. Public opinion on automated driving: Results of an international questionnaire among 5000 respondents. Transp. Res. Part F Traffic Psychol. Behav. 2015, 32, 127–140. [Google Scholar] [CrossRef]
- Piao, J.; Mcdonald, M.; Hounsell, N.; Graindorge, M.; Graindorge, T.; Malhene, N. Public Views towards Implementation of Automated Vehicles in Urban Areas. Transp. Res. Procedia 2016, 14, 2168–2177. [Google Scholar] [CrossRef]
- Solbraa Bay, A.J.T. Innovation Adoption in Robotics: Consumer Intentions to Use Autonomous Vehicles. Master’s Thesis, Norwegian School of Economics, Bergen, Norway, 2016. [Google Scholar]
- Zmud, J.; Sener, I.N.; Wagner, J. Consumer Acceptance and Travel Behavior: Impacts of Automated Vehicles; Texas A&M Transportation Institute: Bryan, TX, USA, 2016. [Google Scholar]
- Hohenberger, C.; Spörrle, M.; Welpe, I.M. How and why do men and women differ in their willingness to use automated cars? The influence of emotions across different age groups. Transp. Res. Part A 2016, 94, 374–385. [Google Scholar] [CrossRef]
- Bansal, P.; Kockelman, K.M. Forecasting Americans’ long-term adoption of connected and autonomous vehicle technologies. Transp. Res. Part A 2017, 95, 49–63. [Google Scholar] [CrossRef]
- Lavieri, P.S.; Garikapati, V.M.; Bhat, C.R.; Pendyala, R.M.; Astroza, S.; Dias, F.F. Modeling individual preferences for ownership and sharing of autonomous vehicle technologies. Transp. Res. Rec. 2017, 2665, 1–10. [Google Scholar] [CrossRef]
- Robertson, R.D.; Meister, S.R.; Vanlaar, W.G.; Hing, M.M. Automated vehicles and behavioural adaptation in Canada. Transp. Res. Part A Policy Pract. 2017, 104, 50–57. [Google Scholar] [CrossRef]
- Shin, K.J.; Managi, S. Consumer Demand for Fully Automated Driving Technology: Evidence from Japan; Research Institute of Economy, Trade and Industry: Tokyo, Japan, 2017. [Google Scholar]
- Moták, L.; Neuville, E.; Chambres, P.; Marmoiton, F.; Monéger, F.; Coutarel, F.; Izaute, M. Antecedent variables of intentions to use an autonomous shuttle: Moving beyond TAM and TPB? Eur. Rev. Appl. Psychol. 2017, 67, 269–278. [Google Scholar] [CrossRef]
- Daziano, R.A.; Sarrias, M.; Leard, B. Are consumers willing to pay to let cars drive for them? Analyzing response to autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2017, 78, 150–164. [Google Scholar] [CrossRef]
- Deb, S.; Strawderman, L.; Carruth, D.W.; Dubien, J.; Smith, B.; Garrison, T. Development and Validation of a Questionnaire to Assess Pedestrian Receptivity toward Fully Autonomous Vehicles. Transp. Res. Part C Emerg. Technol. 2017, 84, 178–195. [Google Scholar] [CrossRef]
- Talebian, A.; Mishra, S. Predicting the adoption of connected autonomous vehicles: A new approach based on the theory of diffusion of innovations. Transp. Res. Part C Emerg. Technol. 2018, 95, 363–380. [Google Scholar] [CrossRef]
- Hartwich, F.; Witzlack, C.; Beggiato, M.; Krems, J.F. The first impression counts—A combined driving simulator and test track study on the development of trust and acceptance of highly automated driving. Transp. Res. Part F Traffic Psychol. Behav. 2019, 65, 522–535. [Google Scholar] [CrossRef]
- Nordhoff, S.; de Winter, J.; Madigan, R.; Merat, N.; van Arem, B.; Happee, R. User acceptance of automated shuttles in Berlin-Schöneberg: A questionnaire study. Transp. Res. Part F Traffic Psychol. Behav. 2018, 58, 843–854. [Google Scholar] [CrossRef]
- Winter, S.R.; Keebler, J.R.; Rice, S.; Mehta, R.; Baugh, B.S. Patient perceptions on the use of driverless ambulances: An affective perspective. Transp. Res. Part F Traffic Psychol. Behav. 2018, 58, 431–441. [Google Scholar] [CrossRef]
- Winter, S.R.; Rice, S.; Mehta, R.; Walters, N.W.; Pierce, M.B.; Anania, E.C.; Milner, M.N.; Rao, N. Do Americans differ in their willingness to ride in a driverless bus? J. Unmanned Veh. Syst. 2018, 6, 267–278. [Google Scholar] [CrossRef]
- Leicht, T.; Chtourou, A.; Youssef, K.B. Consumer innovativeness and intentioned autonomous car adoption. J. High. Technol. Manag. Res. 2018, 29, 1–11. [Google Scholar] [CrossRef]
- Buckley, L.; Kaye, S.-A.; Pradhan, A.K. Psychosocial factors associated with intended use of automated vehicles: A simulated driving study. Accid. Anal. Prev. 2018, 115, 202–208. [Google Scholar] [CrossRef] [PubMed]
- Liljamo, T.; Liimatainen, H.; Pöllänen, M. Attitudes and concerns on automated vehicles. Transp. Res. Part F Traffic Psychol. Behav. 2018, 59, 24–44. [Google Scholar] [CrossRef]
- Nielsen, T.A.S.; Haustein, S. On sceptics and enthusiasts: What are the expectations towards self-driving cars? Transp. Policy 2018, 66, 49–55. [Google Scholar] [CrossRef]
- Salonen, A.O. Passenger’s subjective traffic safety, in-vehicle security and emergency management in the driverless shuttle bus in Finland. Transp. Policy 2018, 61, 106–110. [Google Scholar] [CrossRef]
- Kaur, K.; Rampersad, G. Trust in driverless cars: Investigating key factors influencing the adoption of driverless cars. J. Eng. Technol. Manag. 2018, 48, 87–96. [Google Scholar] [CrossRef]
- Hulse, L.M.; Xie, H.; Galea, E.R. Perceptions of autonomous vehicles: Relationships with road Hulse gender and age. Saf. Sci. 2018, 102, 1–13. [Google Scholar] [CrossRef]
- Nazari, F.; Noruzoliaee, M.; Mohammadian, A.K. Shared versus private mobility: Modeling public interest in autonomous vehicles accounting for latent attitudes. Transp. Res. Part C Emerg. Technol. 2018, 97, 456–477. [Google Scholar] [CrossRef]
- Anania, E.; Rice, S.; Winter, S.; Milner, M.; Walters, N.; Pierce, M. Why People Are Not Willing to Let Their Children Ride in Driverless School Buses: A Gender and Nationality Comparison. Soc. Sci. 2018, 7, 34. [Google Scholar] [CrossRef]
- Shabanpour, R.; Golshani, N.; Shamshiripour, A.; Mohammadian, A.K. Eliciting preferences for adoption of fully automated vehicles using best-worst analysis. Transp. Res. Part C Emerg. Technol. 2018, 93, 463–478. [Google Scholar] [CrossRef]
- Panagiotopoulos, I.; Dimitrakopoulos, G. An empirical investigation on consumers’ intentions towards autonomous driving. Transp. Res. Part C Emerg. Technol. 2018, 95, 773–784. [Google Scholar] [CrossRef]
- Xu, Z.; Zhang, K.; Min, H.; Wang, Z.; Zhao, X.; Liu, P. What drives people to accept automated vehicles? Findings from a field experiment. Transp. Res. Part C Emerg. Technol. 2018, 95, 320–334. [Google Scholar] [CrossRef]
- Hudson, J.; Orviska, M.; Hunady, J. People’s attitudes to autonomous vehicles. Transp. Res. Part A Policy Pract. 2019, 121, 164–176. [Google Scholar] [CrossRef]
- Stoiber, T.; Schubert, I.; Hoerler, R.; Burger, P. Will consumers prefer shared and pooled-use autonomous vehicles? A stated choice experiment with Swiss households. Transp. Res. Part D Transp. Environ. 2019, 71, 265–282. [Google Scholar] [CrossRef]
- Wu, J.; Liao, H.; Wang, J.-W.; Chen, T. The role of environmental concern in the public acceptance of autonomous electric vehicles: A survey from China. Transp. Res. Part F Traffic Psychol. Behav. 2019, 60, 37–46. [Google Scholar] [CrossRef]
- Berliner, R.M.; Hardman, S.; Tal, G. Uncovering early adopter’s perceptions and purchase intentions of automated vehicles: Insights from early adopters of electric vehicles in California. Transp. Res. Part F Traffic Psychol. Behav. 2019, 60, 712–722. [Google Scholar] [CrossRef]
- Liu, P.; Yang, R.; Xu, Z. Public acceptance of fully automated driving: Effects of social trust and risk/benefit perceptions. Risk Anal. 2019, 39, 326–341. [Google Scholar] [CrossRef] [PubMed]
- Liu, P.; Zhang, Y.; He, Z. The effect of population age on the acceptable safety of self-driving vehicles. Reliab. Eng. Syst. Saf. 2019, 185, 341–347. [Google Scholar] [CrossRef]
- Liu, P.; Guo, Q.; Ren, F.; Wang, L.; Xu, Z. Willingness to pay for self-driving vehicles: Influences of demographic and psychological factors. Transp. Res. Part C Emerg. Technol. 2019, 100, 306–317. [Google Scholar] [CrossRef]
- Zhang, T.; Tao, D.; Qu, X.; Zhang, X.; Lin, R.; Zhang, W. The roles of initial trust and perceived risk in public’s acceptance of automated vehicles. Transp. Res. Part C Emerg. Technol. 2019, 98, 207–220. [Google Scholar] [CrossRef]
- Penmetsa, P.; Adanu, E.K.; Wood, D.; Wang, T.; Jones, S.L. Perceptions and expectations of autonomous vehicles–A snapshot of vulnerable road user opinion. Technol. Forecast. Soc. Chang. 2019, 143, 9–13. [Google Scholar] [CrossRef]
- Hardman, S.; Berliner, R.; Tal, G. Who will be the early adopters of automated vehicles? Insights from a survey of electric vehicle owners in the United States. Transp. Res. Part D Transp. Environ. 2019, 71, 248–264. [Google Scholar] [CrossRef]
- Lee, J.; Lee, D.; Park, Y.; Lee, S.; Ha, T. Autonomous vehicles can be shared, but a feeling of ownership is important: Examination of the influential factors for intention to use autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2019, 107, 411–422. [Google Scholar] [CrossRef]
- Manfreda, A.; Ljubi, K.; Groznik, A. Autonomous vehicles in the smart city era: An empirical study of adoption factors important for millennials. Int. J. Inf. Manag. 2019, 102050. [Google Scholar] [CrossRef]
- Investigating end-user, Y.; Kimura, K.; Taniguchi, A.; Morikawa, T. What Affects Social Acceptance and Use Intention for Autonomous Vehicles–Benefits, Risk Perception, or Experience?-Meta-Analysis in Japan. Int. J. Intell. Transp. Syst. Res. 2020, 18, 22–34. [Google Scholar]
- Herrenkind, B.; Brendel, A.B.; Nastjuk, I.; Greve, M.; Kolbe, L.M. Investigating end-user acceptance of autonomous electric buses to accelerate diffusion. Transp. Res. Part D Transp. Environ. 2019, 74, 255–276. [Google Scholar] [CrossRef]
- Herrenkind, B.; Nastjuk, I.; Brendel, A.B.; Trang, S.; Kolbe, L.M. Young people’s travel behavior–Using the life-oriented approach to understand the acceptance of autonomous driving. Transp. Res. Part D Transp. Environ. 2019, 74, 214–233. [Google Scholar] [CrossRef]
- Wang, S.; Zhao, J. Risk preference and adoption of autonomous vehicles. Transp. Res. Part A Policy Pract. 2019, 126, 215–229. [Google Scholar] [CrossRef]
- Bennett, R.; Vijaygopal, R.; Kottasz, R. Willingness of people who are blind to accept autonomous vehicles: An empirical investigation. Transp. Res. Part F Traffic Psychol. Behav. 2020, 69, 13–27. [Google Scholar] [CrossRef]
- Ro, Y.; Ha, Y. A factor analysis of consumer expectations for autonomous cars. J. Comput. Inf. Syst. 2019, 59, 52–60. [Google Scholar] [CrossRef]
- Hegner, S.M.; Beldad, A.D.; Brunswick, G.J. In automatic we trust: Investigating the impact of trust, control, personality characteristics, and extrinsic and intrinsic motivations on the acceptance of autonomous vehicles. Int. J. Hum. Comput. Interact. 2019, 35, 1769–1780. [Google Scholar] [CrossRef]
- Wintersberger, S.; Azmat, M.; Kummer, S. Are We Ready to Ride Autonomous Vehicles? A Pilot Study on Austrian Consumers’ Perspective. Logistics 2019, 3, 20. [Google Scholar] [CrossRef]
- López-Lambas, M.E.; Alonso, A. The Driverless Bus: An Analysis of Public Perceptions and Acceptability. Sustainability 2019, 11, 4986. [Google Scholar] [CrossRef]
- Zarkeshev, A.; Csiszár, C. Are People Ready to Entrust Their Safety to an Autonomous Ambulance as an Alternative and More Sustainable Transportation Mode? Sustainability 2019, 11, 5595. [Google Scholar] [CrossRef]
- Tan, L.; Ma, C.; Xu, X.; Xu, J. Choice Behavior of Autonomous Vehicles Based on Logistic Models. Sustainability 2020, 12, 54. [Google Scholar] [CrossRef]
- Salonen, A.O.; Haavisto, N. Towards Autonomous Transportation. Passengers’ Experiences, Perceptions and Feelings in a Driverless Shuttle Bus in Finland. Sustainability 2019, 11, 588. [Google Scholar] [CrossRef]
- Hinderer, H.; Stegmüller, J.; Schmidt, J.; Sommer, J.; Lucke, J. Acceptance of Autonomous Vehicles in Suburban Public Transport. In Proceedings of the 2019 IEEE International Conference on Engineering, Technology and Innovation (ICE/ITMC), Sophia Antipolis, France, 17–19 June 2019; pp. 1–8. [Google Scholar]
- Hutchins, N.F.; Kerr, A.J.; Hook, L.R. User Acceptance in Autonomous Vehicles: The Evolution of the End User. In Proceedings of the 2019 International Symposium on Systems Engineering (ISSE), Edinburgh, Scotland, 1–3 October 2019; pp. 1–8. [Google Scholar]
- Winter, K.; Wien, J.; Molin, E.; Cats, O.; Morsink, P.; van Arem, B. Taking The Self-Driving Bus: A Passenger Choice Experiment. In Proceedings of the 2019 6th International Conference on Models and Technologies for Intelligent Transportation Systems (MT-ITS), Kraków, Poland, 5–7 June 2019; pp. 1–8. [Google Scholar]
- Dong, X.; DiScenna, M.; Guerra, E. Transit user perceptions of driverless buses. Transportation 2019, 46, 35–50. [Google Scholar] [CrossRef]
- Rahman, M.M.; Deb, S.; Strawderman, L.; Burch, R.; Smith, B. How the older population perceives self-driving vehicles. Transp. Res. Part F Traffic Psychol. Behav. 2019, 65, 242–257. [Google Scholar] [CrossRef]
- Jing, P.; Huang, H.; Ran, B.; Zhan, F.; Shi, Y. Exploring the factors affecting mode choice Intention of autonomous vehicle based on an extended theory of planned behavior—A case study in China. Sustainability 2019, 11, 1155. [Google Scholar] [CrossRef]
- Kettles, N.; Van Belle, J.-P. Investigation into the Antecedents of Autonomous Car Acceptance using an Enhanced UTAUT Model. In Proceedings of the 2019 International Conference on Advances in Big Data, Computing and Data Communication Systems (icABCD), Winterton, South Africa, 5–6 August 2019; pp. 1–6. [Google Scholar]
- Zhang, T.; Tao, D.; Qu, X.; Zhang, X.; Zeng, J.; Zhu, H.; Zhu, H. Automated vehicle acceptance in China: Social influence and initial trust are key determinants. Transp. Res. Part C Emerg. Technol. 2020, 112, 220–233. [Google Scholar] [CrossRef]
- Davis, F.D. Perceived Usefulness, Perceived Ease of Use, and User Acceptance of Information Technology. MIS Q. 1989, 13, 319–340. [Google Scholar] [CrossRef]
- Ajzen, I. The theory of planned behavior. Organ. Behav. Hum. Decis. Process. 1991, 50, 179–211. [Google Scholar] [CrossRef]
- Rogers, E.M. Diffusion of Innovations; The Free Press: New York, NY, USA, 1983. [Google Scholar]
- Venkatesh, V.; Morris, M.G.; Davis, G.B.; Davis, F.D. User acceptance of information technology: Toward a unified view. MIS Q. 2003, 27, 425–478. [Google Scholar] [CrossRef]
- Fishbein, M.; Ajzen, I. Belief, Attitude, Intention, and Behavior: An Introduction to Theory and Research; Elsevier: Amsterdam, The Netherlands, 1977. [Google Scholar]
- McLeroy, K.R.; Bibeau, D.; Steckler, A.; Glanz, K. An ecological perspective on health promotion programs. Health Educ. Q. 1988, 15, 351–377. [Google Scholar] [CrossRef] [PubMed]
- Siegrist, M. A causal model explaining the perception and acceptance of gene technology 1. J. Appl. Soc. Psychol. 1999, 29, 2093–2106. [Google Scholar] [CrossRef]
- Arts, J.W.C.; Frambach, R.T.; Bijmolt, T.H.A. Generalizations on consumer innovation adoption: A meta-analysis on drivers of intention and behavior. Int. J. Res. Mark. 2011, 28, 134–144. [Google Scholar] [CrossRef]
- Venkatesh, V.; Davis, F.; Morris, M.G. Dead or alive? The development, trajectory and future of technology adoption research. J. Assoc. Inf. Syst. 2007, 8, 1. [Google Scholar] [CrossRef]
- Jansson, J. Consumer eco-innovation adoption: Assessing attitudinal factors and perceived product characteristics. Bus. Strategy Environ. 2011, 20, 192–210. [Google Scholar] [CrossRef]
- Petschnig, M.; Heidenreich, S.; Spieth, P. Innovative alternatives take action–Investigating determinants of alternative fuel vehicle adoption. Transp. Res. Part A Policy Pract. 2014, 61, 68–83. [Google Scholar] [CrossRef]
- Eagly, A.H.; Chaiken, S. The Psychology of Attitudes; Harcourt: New York, NY, USA, 1993. [Google Scholar]
- Hu, X.; Jian, W.; Lei, W. Understanding the Travel Behavior of Elderly People in the Developing Country: A Case Study of Changchun, China. Procedia Soc. Behav. Sci. 2013, 96, 873–880. [Google Scholar] [CrossRef]
- Kulviwat, S.; Bruner II, G.C.; Al-Shuridah, O. The role of social influence on adoption of high tech innovations: The moderating effect of public/private consumption. J. Bus. Res. 2009, 62, 706–712. [Google Scholar] [CrossRef]
- Ghazizadeh, M.; Peng, Y.; Lee, J.D.; Boyle, L.N. Augmenting the technology acceptance model with trust: Commercial drivers’ attitudes towards monitoring and feedback. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting; Association for Computing Machinery: New York, NY, USA, 2012; Volume 56, pp. 2286–2290. [Google Scholar]
- Lee, J.D.; See, K.A. Trust in automation: Designing for appropriate reliance. Hum. Factors 2004, 46, 50–80. [Google Scholar] [CrossRef] [PubMed]
- Ghazizadeh, M.; Lee, J.D.; Boyle, L.N. Extending the Technology Acceptance Model to assess automation. Cogn. Technol. Work 2012, 14, 39–49. [Google Scholar] [CrossRef]
- Payne, J.W.; Bettman, J.R.; Johnson, E.J. Behavioral decision research: A constructive processing perspective. Annu. Rev. Psychol. 1992, 43, 87–131. [Google Scholar] [CrossRef]
- Martín-Vega, F.J.; Soret, B.; Aguayo-Torres, M.C.; Kovács, I.Z.; Gómez, G. Geolocation-Based Access for Vehicular Communications: Analysis and Optimization via Stochastic Geometry. IEEE Trans. Veh. Technol. 2017, 67, 3069–3084. [Google Scholar] [CrossRef]
- Noor-A-Rahim, M.; Ali, G.M.N.; Guan, Y.L.; Ayalew, B.; Chong, P.H.J.; Pesch, D. Broadcast Performance Analysis and Improvements of the LTE-V2V Autonomous Mode at Road Intersection. IEEE Trans. Veh. Technol. 2019, 68, 9359–9369. [Google Scholar] [CrossRef]
- Vukadinovic, V.; Bakowski, K.; Marsch, P.; Garcia, I.D.; Xu, H.; Sybis, M.; Sroka, P.; Wesolowski, K.; Lister, D.; Thibault, I. 3GPP C-V2X and IEEE 802.11 p for Vehicle-to-Vehicle communications in highway platooning scenarios. Ad Hoc Netw. 2018, 74, 17–29. [Google Scholar] [CrossRef]
- Chekired, D.A.; Togou, M.A.; Khoukhi, L.; Ksentini, A. 5G-slicing-enabled scalable SDN core network: Toward an ultra-low latency of autonomous driving service. IEEE J. Sel. Areas Commun. 2019, 37, 1769–1782. [Google Scholar] [CrossRef]
- Naik, G.; Choudhury, B.; Park, J.-M. IEEE 802.11 bd & 5G NR V2X: Evolution of radio access technologies for V2X communications. IEEE Access 2019, 7, 70169–70184. [Google Scholar]
- Adams, J.A. Cognitive task analysis for unmanned aerial system design. Handb. Unmanned Aer. Veh. 2015, 2425–2441. [Google Scholar] [CrossRef]
- Vrkljan, B.H.; Anaby, D. What vehicle features are considered important when buying an automobile? An examination of driver preferences by age and gender. J. Saf. Res. 2011, 42, 61–65. [Google Scholar] [CrossRef]
- Mohammadian, A.; Miller, E. Empirical investigation of household vehicle type choice decisions. Transp. Res. Rec. 2003, 1854, 99–106. [Google Scholar] [CrossRef]
- Cairns, S.; Harmer, C.; Hopkin, J.; Skippon, S. Sociological perspectives on travel and mobilities: A review. Transp. Res. Part A Policy Pract. 2014, 63, 107–117. [Google Scholar] [CrossRef]
- Gucwa, M. Mobility and energy impacts of automated cars. In Proceedings of the Automated Vehicles Symposium, San Francisco, CA, USA, 15–17 July 2014. [Google Scholar]
- van den Berg, V.; Verhoef, E.T. Congestion tolling in the bottleneck model with heterogeneous values of time. Transp. Res. Part B Methodol. 2011, 45, 60–78. [Google Scholar] [CrossRef]
- Noruzoliaee, M.; Zou, B.; Liu, Y. Roads in transition: Integrated modeling of a manufacturer-traveler-infrastructure system in a mixed autonomous/human driving environment. Transp. Res. Part C Emerg. Technol. 2018, 90, 307–333. [Google Scholar] [CrossRef]
- Arbore, A.; Soscia, I.; Bagozzi, R.P. The Role of Signaling Identity in the Adoption of Personal Technologies. J. Assoc. Inf. Syst. 2014, 15, 86. [Google Scholar] [CrossRef]
- Gatersleben, B. Affective and symbolic aspects of car use. In Threats from Car Traffic to the Quality of Urban Life: Problems, Causes and Solutions; Emerald Group Publishing Limited: Bentley, UK, 2007; pp. 219–233. [Google Scholar]
- Li, J.; Xu, L.; Yao, D.; Mao, Y. Impacts of symbolic value and passenger satisfaction on bus use. Transp. Res. Part D Transp. Environ. 2019, 72, 98–113. [Google Scholar] [CrossRef]
- Steg, L. Car use: Lust and must. Instrumental, symbolic and affective motives for car use. Transp. Res. Part A 2005, 39, 147–162. [Google Scholar] [CrossRef]
- Zhu, C.; Zhu, Y.; Lu, R.; He, R.; Xia, Z. Perceptions and aspirations for car ownership among Chinese students attending two universities in the Yangtze Delta, China. J. Transport. Geogr. 2012, 24, 315–323. [Google Scholar] [CrossRef]
- Witt, U. Symbolic consumption and the social construction of product characteristics. Struct. Chang. Econ. Dyn. 2010, 21, 17–25. [Google Scholar] [CrossRef]
- Greenblatt, J.B.; Saxena, S. Autonomous taxis could greatly reduce greenhouse-gas emissions of US light-duty vehicles. Nat. Clim. Chang. 2015, 5, 860. [Google Scholar] [CrossRef]
- Webb, J.; Wilson, C.; Kularatne, T. Will people accept shared autonomous electric vehicles? A survey before and after receipt of the costs and benefits. Econ. Anal. Policy 2019, 61, 118–135. [Google Scholar] [CrossRef]
- Li, J.J.; Su, C. How face influences consumption. Int. J. Market. Res. 2007, 49, 237–256. [Google Scholar]
- Osswald, S.; Wurhofer, D.; Trösterer, S.; Beck, E.; Tscheligi, M. Predicting information technology usage in the car: Towards a car technology acceptance model. In Proceedings of the 4th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Portsmouth, NH, USA, 17–19 October 2012; pp. 51–58. [Google Scholar]
- Plewa, C.; Quester, P. Key drivers of university-industry relationships: The role of organisational compatibility and personal experience. J. Serv. Mark. 2007, 21, 370–382. [Google Scholar] [CrossRef]
- Sarkar, M.B.; Echambadi, R.; Cavusgil, S.T.; Aulakh, P.S. The influence of complementarity, compatibility, and relationship capital on alliance performance. J. Acad. Mark. Sci. 2001, 29, 358–373. [Google Scholar] [CrossRef]
- Abadi, H.R.D.; Kabiry, N.; Forghani, M.H. Factors affecting Isfahanian mobile banking adoption based on the technology acceptance model. Int. J. Acad. Res. Bus. Soc. Sci. 2013, 3, 611. [Google Scholar]
- Featherman, M.S.; Miyazaki, A.D.; Sprott, D.E. Reducing online privacy risk to facilitate e-service adoption: The influence of perceived ease of use and corporate credibility. J. Serv. Mark. 2010, 24, 219–229. [Google Scholar] [CrossRef]
- Hansen, J.M.; Saridakis, G.; Benson, V. Risk, trust, and the interaction of perceived ease of use and behavioral control in predicting consumers’ use of social media for transactions. Comput. Hum. Behav. 2018, 80, 197–206. [Google Scholar] [CrossRef]
- Litman, T. Autonomous Vehicle Implementation Predictions; Victoria Transport Policy Institute: Victoria, BC, Canada, 2017. [Google Scholar]





© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).