Linear Discriminant Analysis-Based Dynamic Indoor Localization Using Bluetooth Low Energy (BLE)

 ,
,  ,
,  and
and 
Abstract
1. Introduction
- Modeling of LDA to predict a user’s current location dynamically based on RSSI patterns in real time indoor environment.
- Comparative analysis of LDA with other machine learning techniques, such as naive Bayes, KNN, SVM and the decision tree.
2. Literature Review
2.1. K-Nearest Neighbor (KNN)
2.2. Support Vector Machine (SVM)
2.3. Decision Tree
2.4. Naive Bayes
2.5. Linear Discriminant Analysis (LDA)
2.6. Related Work
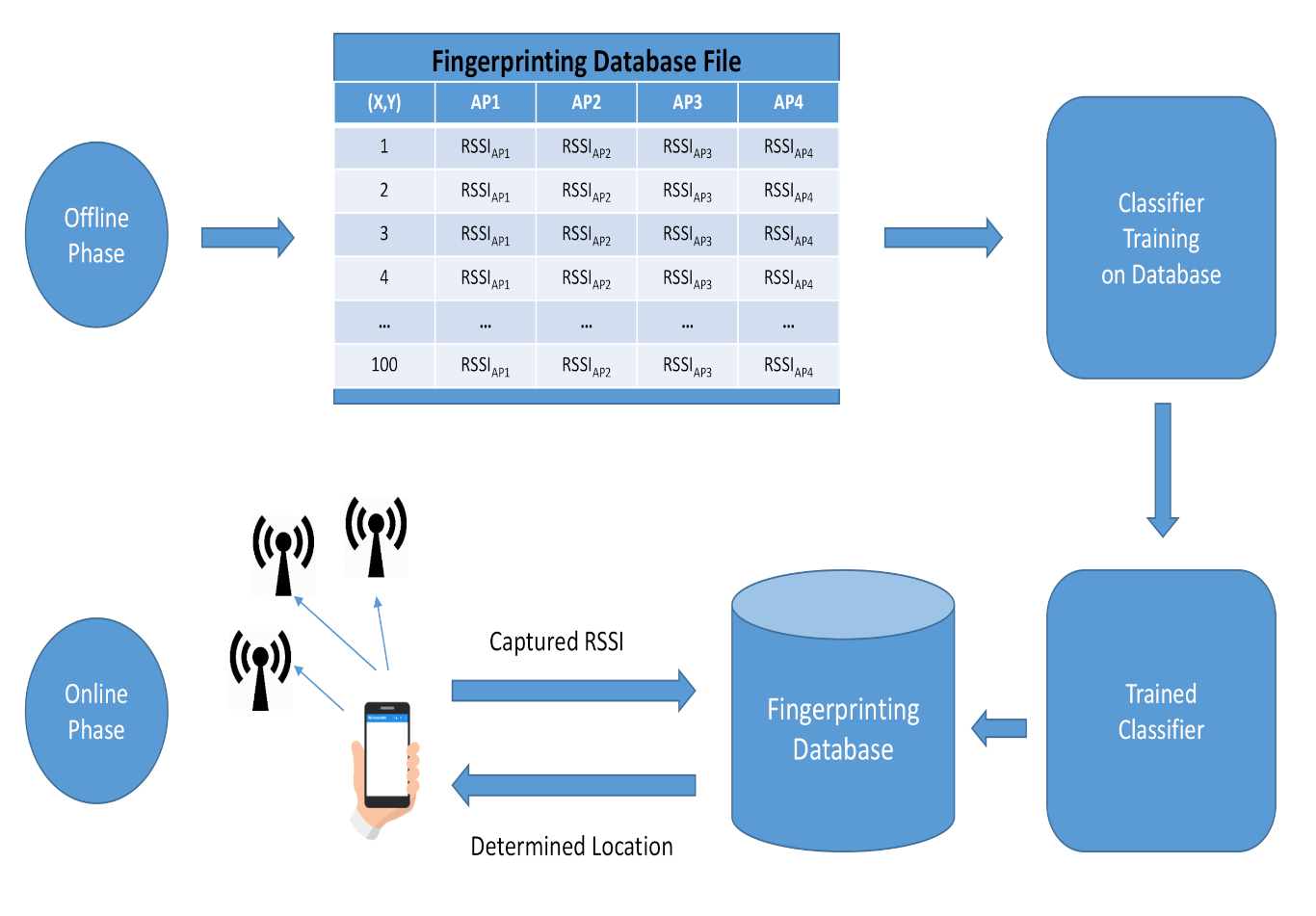
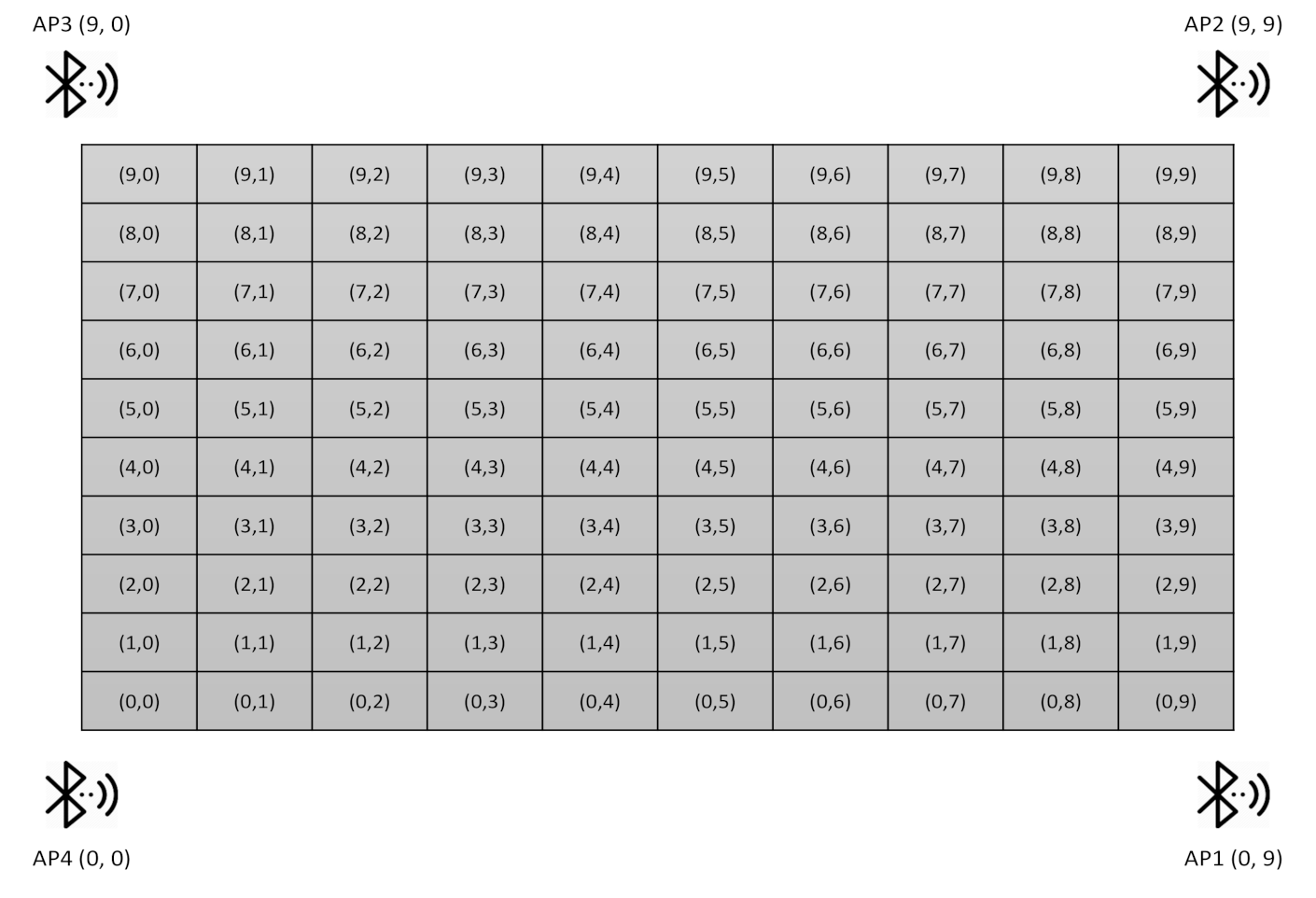
3. Proposed System Model
Position Estimation Using Linear Discriminant Analysis
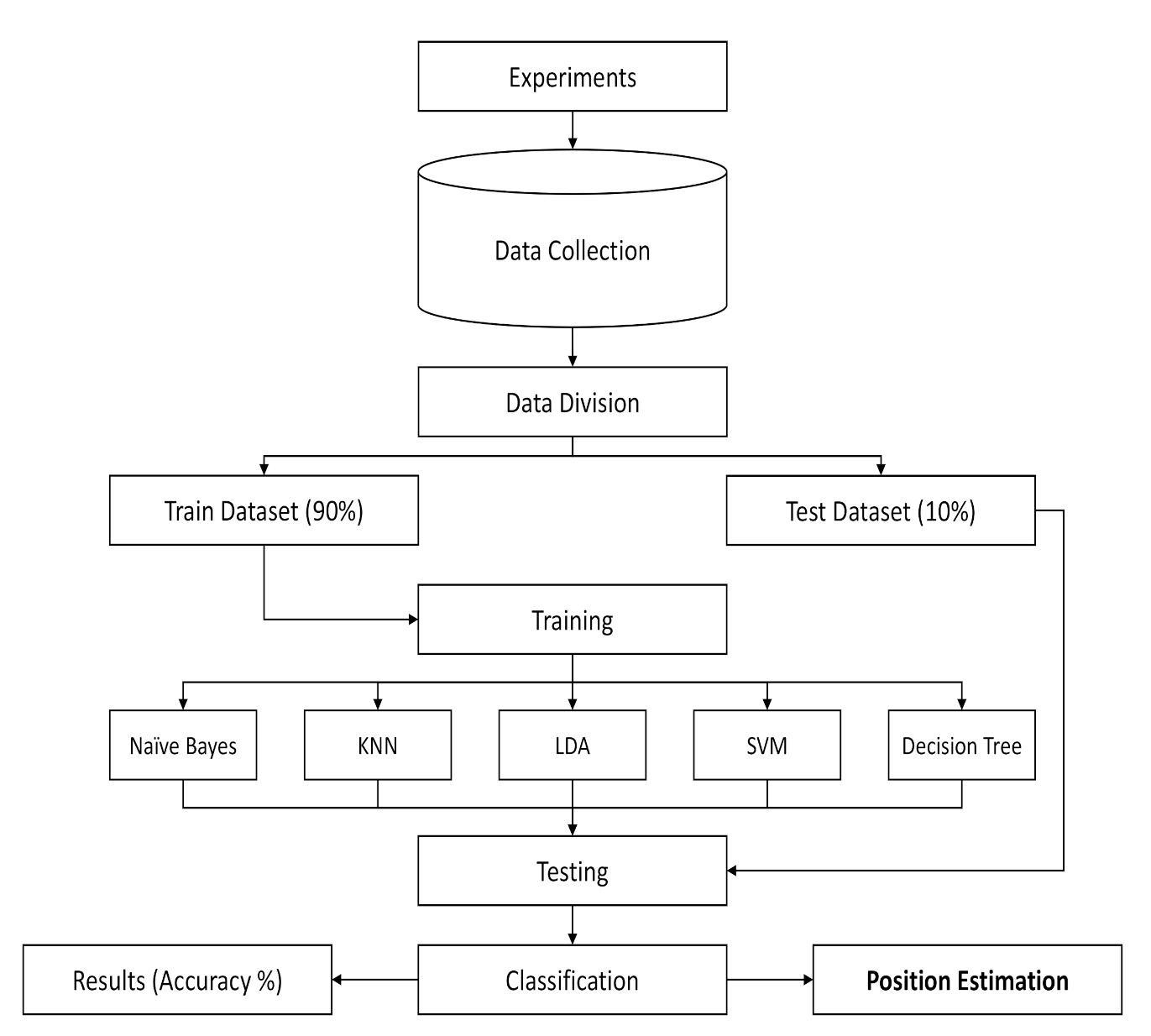
4. Performance Evaluation
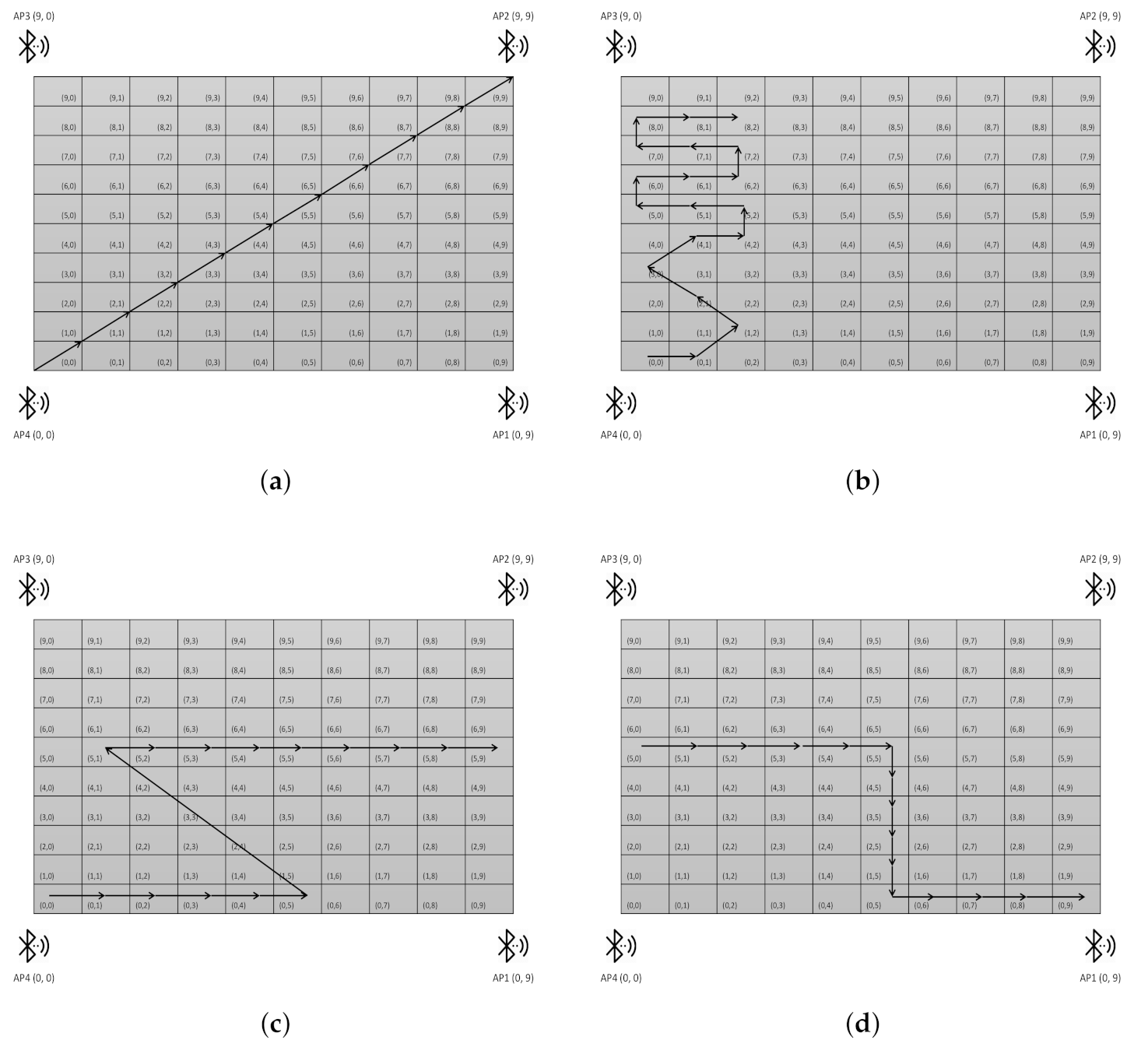
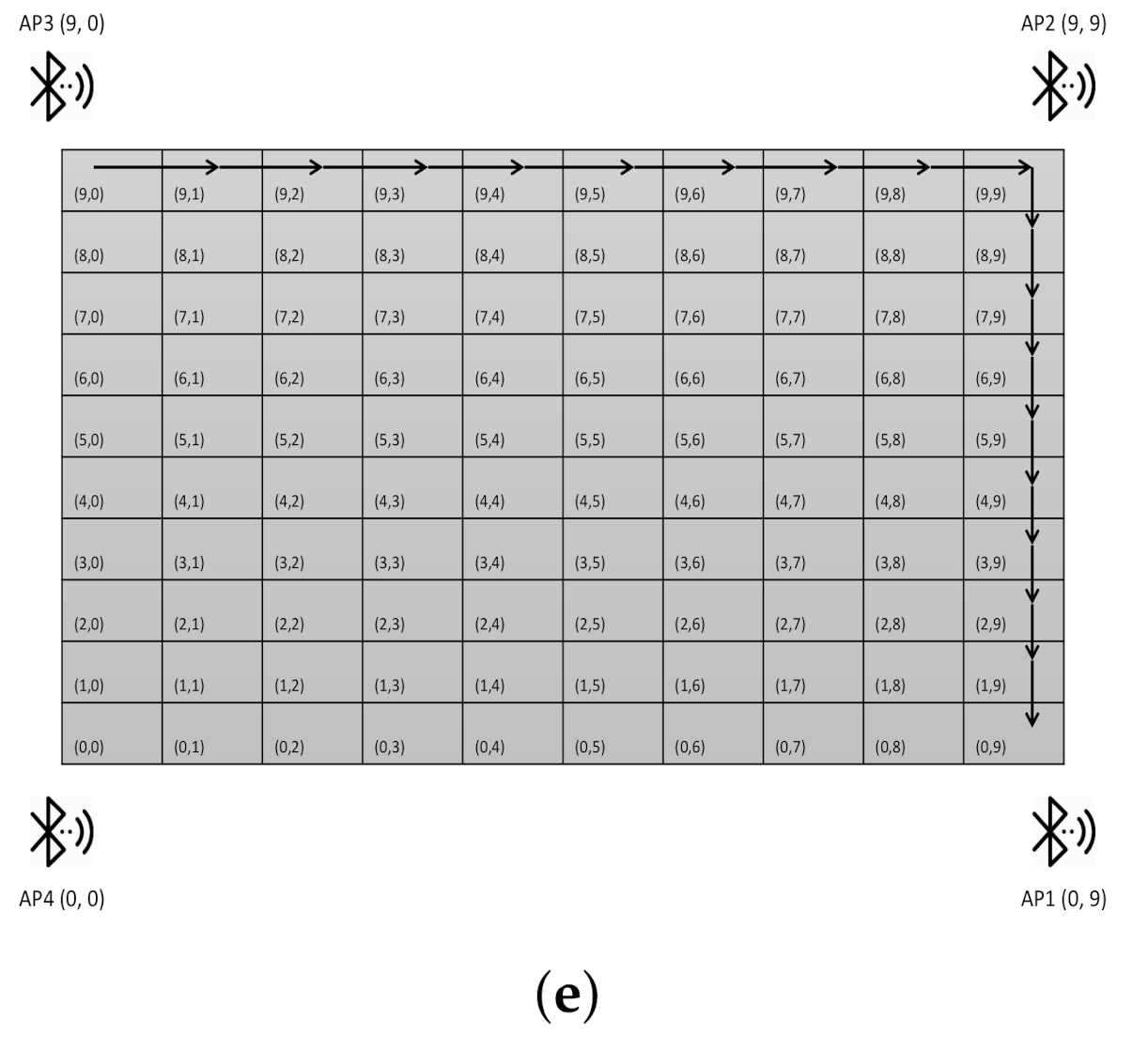
4.1. Trajectories
4.2. Testing
4.2.1. Comparison of Accuracy between Classifiers
4.2.2. Comparison of Execution Time
4.2.3. Mean Analysis
5. Conclusions
6. Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Hofmann-Wellenhof, B.; Lichtenegger, H.; Collins, J. Global Positioning System: Theory and Practice; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Misra, P.; Enge, P. Global Positioning System: Signals, Measurements and Performance, 2nd ed.; Ganga-Jamuna Press: Kathmandu, Nepal, 2006; Volume 206. [Google Scholar]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of Wireless Indoor Positioning Techniques and Systems. IEEE Trans. Syst. Man Cybern. Part C 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Lovón-Melgarejo, J.; Castillo-Cara, M.; Huarcaya-Canal, O.; Orozco-Barbosa, L.; García-Varea, I. Comparative Study of Supervised Learning and Metaheuristic Algorithms for the Development of Bluetooth-Based Indoor Localization Mechanisms. IEEE Access 2019, 7, 26123–26135. [Google Scholar] [CrossRef]
- Dijk, T.V. Indoor Localization Using BLE Using Bluetooth Low Energy for Room-Level Localization. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2016. [Google Scholar]
- Xiong, Z.; Song, Z.; Scalera, A.; Ferrera, E.; Sottile, F.; Brizzi, P.; Tomasi, R.; Spirito, M.A. Hybrid WSN and RFID indoor positioning and tracking system. EURASIP J. Embed. Syst. 2013, 2013, 6. [Google Scholar] [CrossRef]
- Nuradha, T.; Gnanarathne, I.; Perera, L.; Denipitiyage, D.; Dias, D. Beacon Placement Algorithm for Hybrid Indoor Positioning with Wi-Fi and Bluetooth Low Energy. In Proceedings of the 2019 Moratuwa Engineering Research Conference (MERCon), Moratuwa, Sri Lanka, 3–5 July 2019; pp. 135–140. [Google Scholar]
- Subhan, F.; Ahmed, S.; Haider, S.; Saleem, S.; Khan, A.; Ahmed, S.; Numan, M. Hybrid Indoor Position Estimation using K-NN and MinMax. KSII Trans. Internet Inf. Syst. 2019, 13. [Google Scholar] [CrossRef]
- Subhan, F.; Khan, A.; Saleem, S.; Ahmed, S.; Imran, M.; Asghar, Z.; Bangash, J.I. Experimental Analysis of Received Signals Strength in Bluetooth Low Energy (BLE) and its Effect on Distance and Position Estimation. In Transactions on Emerging Telecommunications Technologies; Willey: Hoboken, NJ, USA, 2019; p. e3793. [Google Scholar]
- Li, Z.; Xu, K.; Wang, H.; Zhao, Y.; Wang, X.; Shen, M. Machine-Learning-Based Positioning: A Survey and Future Directions. IEEE Netw. 2019, 33, 96–101. [Google Scholar] [CrossRef]
- Bahl, P.; Padmanabhan, V.N.; Bahl, V.; Padmanabhan, V. RADAR: An In-Building RF-Based User Location and Tracking System; IEEE: Tel Aviv, Israel, 2000. [Google Scholar]
- Brunato, M.; Battiti, R. Statistical learning theory for location fingerprinting in wireless LANs. Comput. Netw. 2005, 47, 825–845. [Google Scholar] [CrossRef]
- Farahiyah, D.; Romadhoni, R.M.; Pratomo, S.W. Navie Bayes Classifier for Indoor Positioning using Bluetooth Low Energy. In Proceedings of the 2018 Artificial Intelligence and Cloud Computing Conference, New York, NY, USA, 5 December 2018; pp. 181–185. [Google Scholar]
- Mo, Y.; Zhang, Z.; Lu, Y.; Meng, W.; Agha, G. Random forest based coarse locating and kpca feature extraction for indoor positioning system. Math. Probl. Eng. 2014, 2014, 850926. [Google Scholar] [CrossRef]
- Youssef, M.A.; Agrawala, A.; Shankar, A.U. WLAN Location Determination via Clustering and Probability Distributions. In Proceedings of the First IEEE International Conference on Pervasive Computing and Communications, Fort Worth, TX, USA, 23–26 March 2003; pp. 143–150. [Google Scholar]
- Youssef, M.; Agrawala, A. Handling samples correlation in the horus system. IEEE Infocom 2004, 2, 1023–1031. [Google Scholar]
- Roos, T.; Myllymäki, P.; Tirri, H.; Misikangas, P.; Sievänen, J. A probabilistic approach to WLAN user location estimation. Int. J. Wirel. Inf. Netw. 2002, 9, 155–164. [Google Scholar] [CrossRef]
- Mehmood, H.; Tripathi, N.K.; Tipdecho, T. Indoor positioning system using artificial neural network. J. Comput. Sci. 2010, 6, 1219. [Google Scholar] [CrossRef]
- Yim, J. Introducing a decision tree-based indoor positioning technique. Expert Syst. Appl. 2008, 34, 1296–1302. [Google Scholar] [CrossRef]
- Battiti, R.; Brunato, M.; Villani, A. Statistical Learning Theory for Location Fingerprinting in Wireless LANs; Technical Report; University of Trento: Trento, Italy, 2002. [Google Scholar]
- Deng, Z.A.; Xu, Y.B.; Wu, D. Indoor positioning in WLAN environment based on support vector regression and space partitioning. Adv. Mater. Res. Trans Tech Publ. 2011, 204, 1599–1602. [Google Scholar] [CrossRef]
- Vahidnia, M.H.; Malek, M.R.; Mohammadi, N.; Alesheikh, A.A. A hierarchical signal-space partitioning technique for indoor positioning with WLAN to support location-awareness in mobile map services. Wirel. Pers. Commun. 2013, 69, 689–719. [Google Scholar] [CrossRef]
- Xie, Y.; Wang, Y.; Nallanathan, A.; Wang, L. An improved K-nearest-neighbor indoor localization method based on spearman distance. IEEE Signal Process. Lett. 2016, 23, 351–355. [Google Scholar] [CrossRef]
- Wang, X.; Gao, L.; Mao, S.; Pandey, S. CSI-based fingerprinting for indoor localization: A deep learning approach. IEEE Trans. Veh. Technol. 2016, 66, 763–776. [Google Scholar] [CrossRef]
- Mika, S.; Ratsch, G.; Weston, J.; Scholkopf, B.; Mullers, K.R. Fisher Discriminant Analysis with Kernels. In Proceedings of the Neural Networks for Signal Processing IX: Proceedings of the 1999 IEEE Signal Processing Society Workshop (cat. no. 98th8468), Madison, WI, USA, 25–25 August 1999; pp. 41–48. [Google Scholar]
- Gill, S.S.; Tuli, S.; Xu, M.; Singh, I.; Singh, K.V.; Lindsay, D.; Tuli, S.; Smirnova, D.; Singh, M.; Jain, U.; et al. Transformative effects of IoT, Blockchain and Artificial Intelligence on cloud computing: Evolution, vision, trends and open challenges. Internet Things 2019, 8, 100118. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Classifiers | Trajectory 1 | Trajectory 2 | Trajectory 3 | Trajectory 4 | Trajectory 5 |
|---|---|---|---|---|---|
| Naive Bayes | 86.4 | 69.2 | 77.2 | 77.9 | 81.2 |
| KNN, N = 1 | 83.8 | 60.3 | 71.2 | 69.0 | 65.9 |
| SVM | 83.5 | 66.7 | 76.9 | 73.0 | 81.8 |
| Decision Tree | 82.9 | 64.1 | 73.2 | 67.0 | 71.5 |
| LDA | 87.1 | 72.1 | 77.3 | 78.5 | 81.7 |
| Classifiers | Trajectory 1 | Trajectory 2 | Trajectory 3 | Trajectory 4 | Trajectory 5 |
|---|---|---|---|---|---|
| Naive Bayes | 118.00 | 131.00 | 117.00 | 117.00 | 121.00 |
| KNN, N = 1 | 0.05 | 0.05 | 0.05 | 0.05 | 0.05 |
| SVM | 1.24 | 1.27 | 1.26 | 1.22 | 1.46 |
| Decision Tree | 14.13 | 14.61 | 14.50 | 14.49 | 15.52 |
| LDA | 9.30 | 9.27 | 9.16 | 9.27 | 9.60 |
| Classifiers | Mean Accuracy % | Mean Standard Deviation |
|---|---|---|
| Naive Bayes | 78.38 | 5.62 |
| KNN, N=1 | 70.04 | 7.79 |
| SVM | 76.38 | 6.09 |
| Decision Tree | 71.74 | 6.44 |
| LDA | 79.34 | 4.96 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Subhan, F.; Saleem, S.; Bari, H.; Khan, W.Z.; Hakak, S.; Ahmad, S.; El-Sherbeeny, A.M. Linear Discriminant Analysis-Based Dynamic Indoor Localization Using Bluetooth Low Energy (BLE). Sustainability 2020, 12, 10627. https://doi.org/10.3390/su122410627
Subhan F, Saleem S, Bari H, Khan WZ, Hakak S, Ahmad S, El-Sherbeeny AM. Linear Discriminant Analysis-Based Dynamic Indoor Localization Using Bluetooth Low Energy (BLE). Sustainability. 2020; 12(24):10627. https://doi.org/10.3390/su122410627
Chicago/Turabian StyleSubhan, Fazli, Sajid Saleem, Haseeb Bari, Wazir Zada Khan, Saqib Hakak, Shafiq Ahmad, and Ahmed M. El-Sherbeeny. 2020. "Linear Discriminant Analysis-Based Dynamic Indoor Localization Using Bluetooth Low Energy (BLE)" Sustainability 12, no. 24: 10627. https://doi.org/10.3390/su122410627
APA StyleSubhan, F., Saleem, S., Bari, H., Khan, W. Z., Hakak, S., Ahmad, S., & El-Sherbeeny, A. M. (2020). Linear Discriminant Analysis-Based Dynamic Indoor Localization Using Bluetooth Low Energy (BLE). Sustainability, 12(24), 10627. https://doi.org/10.3390/su122410627