1. Introduction
Considering the factors examined in this study, the problem with reconstructing relevant perspectives is that our vision is hampered by our daily affairs, which obscure our daily movements; therefore, we are unable to record data precisely. The dilemmas that we face in our daily choices often hamper the development of an appropriate criterion that can establish a progressive differentiation between biological conjectures, habits of will, and the search for the coordinates of assembled actions based on the goal(s) that we set for ourselves and for the world around us. Human history “remains conjectural”, as C. Levy-Strauss emphasizes, because it remains in an unconscious phase in which concrete individual or collective experiences do not relate to each other considering the essential objectives of nature and sustainability [
1] (pp. 5–6). In this section, we specifically mention “sustainability” as a tribute both to the academic journal for which we are writing and because of the broad characteristics of this concept. Here, “sustainability” is a collective attribution that underlies and similarly flows from a collective process of awareness of the concept. Sustainability is, therefore, both deduced and induced.
With these premises, this research aims to establish a series of hypotheses on the geometry of spatial knowledge, particularly to determine the occurrence probability of predatory crimes in the city center of Hamburg, Germany, which could help develop spatial reasoning through the artificial use of characteristics defined here as “discriminating factors”. These factors are understood in a rather naive way but are not too unsophisticated or invalid for the present analysis.
A significant problem that we often face due to our own personal quantitative flaws—as our decades-long training was purely socio-psychological—is primarily the transformation of nearly-imaginative ideation into a sensitive metric. From the onset, we measured random walks (hereafter: RWs) to explore certain common behaviors, such as buying food or going shopping while looking through windows (so-called “window shopping”), in the streets of downtown Hamburg, Germany.
RWs are, therefore, used in our article to describe the RWs in the city center and all the activities that result from such walks. The random walker chooses his/her movements–displacements and operates changes in his/her direction based on 24 discriminating factors that are illustrated later. As this research focused on the likelihood of predatory crimes occurring in downtown Hamburg, the context (i.e., the structure of the spatial opportunity for likelihood) is neither composed of these factors and the ways in which they can be managed by the local authorities nor of the socio-economic contexts of the considered spatial cutouts (as highlighted in our geographical suggestions).
A simulation of RWs increases the possibility that the movements of the walker will be truly random and not predetermined by an integer degree. Half of the subjects used as an example in a hypothetical doxa based on their predisposition to intercepting discriminating factors travel to the right of their starting point, while the other half travel to the left. The position is independent of the performance estimated through the scores obtained based on the discrimination factors and is unlikely to be able to reproduce the “amount” of directional changes nor the exact origin point of the directional changes in RWs.
Our path is thus influenced by the predisposition of the random walker (i) to intercept the discriminating factors and interpret them according to his/her average knowledge, (ii) to decide whether to use one means of movement–displacement rather than another, (iii) to change direction, (iv) to stop at a certain target of interest, or (v) to abandon his/her RW.
We are not interested in the motivational goals behind the crimes, although these goals may be somewhat affected by the movements of the Random Walker. However, we include the occurrence probability of crimes in our analysis, even for crimes without motivation. As an example, we examine a murder case in which the perpetrator’s main motivation is theft more than premeditation. In this case, the murder is simply a function of another underlying crime (such as in Mafia murders). In such cases, we could not deduce all that could be monitored and followed according to the crime’s probability thanks to observing the visible movements–displacements of the random walker in the city.
To perform an analysis based on well-known models related to the spatial knowledge of geometry and calculate the occurrence probability of crimes (predatory or not), it was necessary to refer to the work of geographers such as Tobler and Brunsdon/Fotheringham et al., that of statistical geographers like Anselin, that of sociologists and behavioral psychologists such as Luhmann and Skinner, and that of space criminologists such as Andresen and Hodgkinson.
Although the focus on the Random Movement–displacement Agent (RMDA) (i.e., the random walker) helped immediately focus on predatory crimes, we initially tried to extend our inferences to more serious crimes, such as terrorist attacks and male-on-female rape (to limit this very serious type of physical assault to its most common target).
Ultimately, however, we realized that we could not predict the likelihood of child abuse or major arson (e.g., boycotting an industrial environment) with our method. Although some of these very serious acts against people may be partly included in the broad category of predatory crimes (by “predatory”, we mean a crime that actually endangers the quality of life and safety of the inhabitants in the city), inferences from other types of philosophical substrates, such as ethics, are so preponderant in such crimes that they preclude us from considering only the quality of life and safety in the city at risk.
We could not deduce anything about such crimes from the simple observable random movements–displacements conceived in our article.
The crimes that we tried to predict based on their probability of occurrence are more inconstant and less predictable than, for example, a terrorist attack [
2]. We argue that the category of predatory crimes is more likely to be conceived by an isolated deviant individual than by real organizations. This also suggests that the people who commit predatory crimes should be monitored to stop them from committing such crimes. Martin and Maples, for instance, conducted research on guardianship as a legal process to help people with disabilities who are unable to take full care of themselves [
3].
The perpetrators of predatory acts may also include murderers, but we could not extend our findings to such criminals. For murder, the offensive act is so disproportionately aimed at the elimination of human beings that nothing relevant can be inferred from how a random walker on a public street changes his/her mind to buy an ice cream or eat a pizza in an outdoor restaurant.
2. Cone of Uncertainty and Calculation of the Probability of Events
The likelihood of the occurrence of predatory crimes based on this chosen type of analysis involves an archetypal perspective on the events in the city of Hamburg and is mainly based on uncertainty. We will briefly explain the 24 discriminating factors that we used to create an attractive pool of references or conditions to articulate the random movements—displacements of the walker from his/her starting point. These 24 discriminating factors represent our cones of perspective and uncertainty that extend from a particular moment or event—in our case, the original movement–displacement of the random walker.
The RMDA that we used for the observable RWs is from October 2019 and is represented by ourselves on a study trip to the city of Hamburg, Germany. Every day, the RW started his/her route early in the morning at around 8:00 a.m., from Albert Mendelsshon Bartholdy-Haus to Hühnerposten 12 20097, Hamburg, moving in the following hours in small spatial cutouts coinciding with a small patch in the city center of Hamburg and usually returning home at around 8:00 p.m. Only on the first day of arrival did the random walker return to his/her student residence after 10 p.m., as he/she did not know the city. This also occurred on another day at the end of the trip, where the RW became lost looking for a birthday cake to buy.
Would our RMDA throw a used handkerchief in the flower bed? Would this subsequently trigger litter to be dropped in that same flower bed? Would the RMDA notice if a jeweler’s window did not have a security key and was thus easily opened to quickly steal a jewel inside? Subsequently, would someone threaten the jeweler with a gun to steal the day’s earnings?
Figure 1 illustrates the cone of uncertainty in our research.
This opens our cone to the broader probability of random events. We could not design a cone that was too narrow and assert, for example, that our RMDA moved forward and backward only according to the number of green spaces, the number of jewelers in the spatial cuts analyzed, or how many and what types of crimes could possibly have resulted from this movement-displacement. Tightening the cone would have offered occurrence probability for events that are clear for themselves and perhaps in disagreement.
These few elements would have maximized general assumptions of the outcomes and possible answers to our questions, but they would have lost many other more important aspects.
The interceptions of the 24 discriminating factors by the RMDA are also random—they are neither certain nor impossible but instead a factor that intervenes between one and the other. These factors include the installation of appropriate speed limiters by local authorities or the investment of a real estate agency in the development of residential neighborhoods to precisely build the spatial cut-outs being observed and navigated by the random walker. Further, “along the edges of the cone there are also less likely events—the wild cards—which, if they were to occur, would be transformative” [
4]. These wildcards are “trends or events that have a low occurrence probability (less than 10%) or probabilities that you simply cannot quantify but which, if events were to occur, would have a disproportionate impact” [
4]. We wanted to consider all elements relevant to our cone of analysis from the spatial cutouts of our RWs in 2019.
2.1. How to Pass on the Probability of Events through a Systemic Stance
In making our analysis, we particularly followed the theories of the German sociologist Niklas Luhmann, who broadened and reformulated Parsons’ systemic view by considering social phenomena primarily from the perspective of General Systems Theory (GST). Luhmann grounded his vision on the theoretical concept of the “social system”.
Among the many definitions of this concept, the following is particularly significant: “A social system is a connection with actions which relate to one another and which are ordered with respect to an environment” [
5].
Luhmann is phobic towards his own environment. He, therefore, begins his work by seeking to build an organized world according to a rigid separation of roles; however, due to their inherent flexibility according to the author, these roles are also interchangeable [
5]. For example, the actions carried out by an individual in his or her capacity as a judge will fall under the legal system, those carried out under the function of a father will fall under the family system, and so on [
5,
6,
7,
8]. In each of the systems surrounding the roles of agents, there are different and often irreconcilable logics of action and pre-established mechanisms for communication and decision-making.
One of the main questions asked by Luhmann in interpreting GST is the following: “How, then, can a society that observes and describes the world using a systemic reference, developing the highest thinking capacities of a system, and using the distinction of an environment and a system (of words and things), dissolve the paradox of the world as a frameless and indistinguishable whole that cannot be observed?” [
7]. Simply put, Luhmann observes that the theatricality of human action produces a shifting background as quickly as the human eye moves in search of evidence related to what he/she is witnessing. To observe means to change from time to time, and to change means to cut-out and then observe again—and so on in a continuous loop, according to contemporary computer terminology. Our answer in this article to this important question posed by Luhmann, and also related to the cone of uncertainty of events, is that one should look at events through the eye of an average RMDA.
An RMDA is “average” (Although this concept is somewhat borrowed from the outdated theories of Quetelet on human beings of average genetic qualities and skills (in particular, in its extensions by H. Halbwachs, La théorie de l’homme moyen, Paris 1913; C. Gini, L’uomo medio, in Giorn. degli econ., 1914), we do not refer exactly to this theory, as its original racial elements are not of interest here. The same Quetelet had also been misunderstood in its original concepts, which were intended to be purely statistical.) when he/she is an ordinary person without any particular training and has average statistical knowledge and the average ability to self-assess his/her own movements–displacements in the surrounding environment.
Our behavioral self-survey was useful for selecting the RWs, from which the randomly selected nodes and the associated edge computations were used to extend the predatory crime occurrence probability assumptions to neighborhood nodes with configurational scale scores that were significantly high. The emphasis on systems theory, particularly the aforementioned work of Niklas Luhmann, was useful for quantifying the multiplicity of theoretical strands that, from time to time, slipped from the unique perspective cone chosen by the initial position of our random walker.
2.2. Who Is the Random Walker and How Will He/She Behave?
Considering media culture, determined particularly by media messaging and compulsory education, our RMDA’s encounters and RWs’ movement through the streets—in our case, in Hamburg—clearly conformed to empirical variance models. He/she was not always able to assess or “read” such encounters even if he/she had been informed that he/she was participating in the observations.
Our RMDA is a person who aspires to surpass oneself and his/her limitations, due to either imperfect genetic makeup (which it is not possible to escape without the use of a drug that activates higher neural processes) or insufficient scholarly training. The RMDA cares little about real risks like slipping on a glossy sheet of paper or losing a dime and instead worries about much more complex dangers like sudden arson or a sudden robbery in a central bank.
He/she imagines that a “good doctor” (this is a reference to a well-known work of fiction broadcast by the main channel of the national TV of the authors) will come to the aid of the wounded, that a highly prepared intervention team will enter a building and rescue a pregnant woman, and that a man unemployed for months will take a knife and kidnap an old lady demanding a ransom from local authorities.
2.3. Discerning between Theories and Recording Random Walks (RWs)
As we walked around the Hamburg city center in October 2019, we mentally summarized 33 factors needed to understand how the average RMDA moved and returned to his/her nearby surroundings and, subsequently (but not only), the likelihood of predatory crime in the cutouts in which he/she walked. Our study was an attempt to sketch a “mirror of the city,” a metaphor that highlights the prevalence of the surveillance we sometimes face in our complex urban systems. We then compared our memories of these discriminating factors with the traces recorded from the Google Maps timelines that we received by email for the appropriate year, month, and day of travel in the city of Hamburg, Germany.
This implies that we checked the space-time tracks drawn by the Google Maps timelines several times and sought the best graphic representation of those tracks. We downloaded our tracks and tracked all of our daily movements and displacements from different angles. This was done as a homage to Luhmann’s systems, which are contingent and “autopoietic”—that is, they reproduce themselves endlessly [
7,
8,
9,
10]. An “autopoietic system” is the product of its own processes and resources. Such a social system can duplicate its subsystems indefinitely, giving the impression of simultaneously accepting true and false claims through a sophisticated ordering process of inclusion/exclusion.
Below in
Table 1 are some of the hundreds of photos that the researchers took during their study trip to Hamburg in 2019.
2.4. Factors of Criminality and Social Refutation of the Individual
It was required for this article to list a series of models that show the relationships between variables, including qualitative and semi-qualitative variables. This was also grounded on rather outdated analyses, such as those of the early 20th century by Shaw and McKay, who mapped thousands of episodes of juvenile delinquency and analyzed the relationship between delinquency and various social conditions. Among the various methodologies and approaches used to study and explain the phenomenon of crime, we chose an approach where crime has a strong social component.
That is to say, beyond the genetic registers that can justify the emergence of an “alleged” dysfunction in a population, there is also a super force beyond the emergence of the crime constituted by the society itself. In practice, we favor a reading of crime as primarily an attribution of reality to the charge of certain individuals by others. Criminogenic symptoms may themselves be expressed differently in different people (for example, kleptomania) or not in the same way all the time in the same person.
Therefore, crime depends on how society interprets and attributes the criminogenic reality to one individual rather than to another. The exempted value—the individual who does not belong to the specific domain generated by the criminological statistics—is, in this case, the individual who either escaped classification due to luck or was considered exempt from classification for practical reasons (for example, being the son of an important person or having accomplished a notable deed in the past).
This super force is society, a kind of psychological pressure produced by humans themselves in relation to each other, even without knowledge of such a relationship.
Emotionally, our random city walker—despite being a homeless person—confronted others formally and informally using the nuances of learned or unlearned choices and in interactive or punished situations (i.e., self-punished), with a behavioral position dependent on the acceptance or refutation by the other inhabitants of the surrounding towns. Routine Activity Theory (RAT), which is a classical theory in criminological literature, emphasizes the importance of effective protection to reduce the propensity of motivated offenders to commit crimes against appropriate targets. People who act as “eyes on the street” and are proactive in calling the police or asking questions of potential criminals may be more common in areas where natural surveillance makes it easier to look for strangers. The process by which individuals living in neighborhoods intervene in a way that discourages problematic behavior has sometimes been referred to as “collective effectiveness” [
11].
When criminologists began to model socio-environmental material to investigate the causes of crime in the early 1960s, the classical criminological explanations were not exhaustive. As shown in
Figure 2, a low socioeconomic status (SES), for example, is not a sufficient explanation, as white-collar workers also commit crimes.
The classical explanation for residential mobility—that residential stability has direct positive effects on local friendship networks and the resulting reductions in crime—has not, for example, been explained for contexts where those same friendship networks are intrinsically linked to crime. The logic behind using family breakdowns to explain the resulting anomie in single individuals has nothing to do with crime when applied to the broader associations of the offenders.
Shaw and Mckay (1942) improved the dynamic models to allow for the measurement of changes over time for neighborhood ecological structures and crime. The interplay between social disorganization and crime and spatial interdependence [
12] shifted the attention away from how people approach the problem toward how decision-making processes relate to the environment.
For example, questions about the relevance of a problem can trigger a renegotiation and redefinition of group autonomy, which changes the cycles and stages of internal decision-making [
13]. Likewise, changes in the group environment (e.g., budget cuts, crises, and market shifts) can change the ways in which members deliberate and use resources.
Wilson and Kelling’s “broken windows” hypothesis suggests that physical disorder can serve as a signal to criminals about a lack of social investment in a community and thus lead to increased crime rates [
14]. The thesis of incivility is strongly linked to the internal dynamics of communities and, more precisely, to the impact of incivility or disorder on the degradation of the living environment in neighborhoods, the vulnerability of the residents, and the fear level of those residents [
15,
16,
17,
18]. In this model, weak moral ties and incivility explain the occurrence of crime.
From the perspective of Skogan, 1990, locals fear not only the unpredictable and violent behavior of some people but also the deterioration of the physical environment associated with an increase in crime. Skogan also argued that “areas that tolerate (or cannot effectively counter) loud taverns, sex aids and pharmacies, public alcohol consumption, prostitution and petty riots will almost certainly be rife with crime” [
19].
Cohen and Felson, 1979, on the other hand, noted that “daily activities can influence the location of personal property and objects in places visible and accessible at particular times” [
20] (p. 591). Indeed, changes in the broader social structure generate so many successive changes in the opportunities for delinquency that they cannot possibly account for trends in the crime rate, unless adequate comparisons are made between the situation (prospective, real, and current). According to many authors, direct victimization (i.e., the feelings of being targeted by criminals) automatically triggers an increase in general urban insecurity [
21,
22,
23]. Hirschi had the same doubts about Rational Choice Theory (RCT) because being stubborn, greedy, and cruel as opposed to being passive, submissive, and good is not a consequence of choice (Notably, Hirschi’s theories support a pluralistic and confrontational image of the occurrence of crimes. That all are responsible and all are guilty is the overall message. This does not mean that we have no ethics or that Hirschi took advantage of an unconventional order of society by including criminals in an uncritical way. Uncritical or untenable factors remain a big puzzle for control theories; indeed, Hirschi and his school on deviance are eager to align antecedent events with being criminal).
No loser would choose to continue losing. The strain of losing can push one towards strange defense mechanisms that border on deviance. However, even a desperate delinquent, when asked to choose, would cooperate to achieve social support. Instead, criminal voluntarism (caused by continuing to alienate, behave harshly toward, and coerce relevant individuals) occurs because others make up the bulk of the integration efforts to ruin criminals.
2.5. Environmental Criminology and the Triumph of Location Factors
The Brantinghams advanced a theory of environmental criminology, arguing that crime is a complex event in which four things intersect simultaneously: A law, an offender, a goal, and a place. From the confluence of routine activities and physical structures spanning the relevant areas, an “environmental backdrop” emerges through “crime attractors/generators” and “crime detractors” that serve to concentrate crime in specific locations [
24].
Spatial influences have, therefore, given rise to a whole series of cartographic studies promoting research strategies to identify, monitor, and control the environment by grouping the criminogenic characteristics of a landscape and interpreting vulnerability in the context of exposure [
25] (pp. 531–532). An interwoven systemic explanation was, therefore, needed to detect the likelihood of predatory crimes in downtown Hamburg, which appealed to a specific environmental perspective, including the spatial factors (and our categorizations) of an urban space plot, with the attractor/detractor generators serving as the foundation.
As shown in
Figure 3, the components from a systems perspective revolve around hypotheses that are generally predefined by the researcher and then confirmed by ongoing research.
The scale of space is often that of the neighborhood or local community within the city. Moreover, the primary interest is the offense rather than the offender, and the characteristics of the space are essential to understanding why a specific event occurs [
26].
Caplan and Kennedy proposed terrain-at-risk modeling (RTM) as a spatial analysis technique for the empirical study of the distribution of crime. The resulting maps of at-risk terrain show where certain criminal events are statistically most likely to occur based on certain environmental vulnerabilities in micro-locations.
As Garnier, Caplan, and Kennedy explain: The RTM is used to identify the relative influence of each land use characteristic on the occurrence of criminal events and these influences are then combined to calculate the overall relative risk associated with each location considered [
27].
Marcus Felson, in 1987, explored a series of roads that act as the “socio-circulatory system” of the modern metropolis. In refining his model, Felson defined this system as a “subway-reef”, where the road network provides the means of subsistence and becomes the center of urban growth. In this situation, private and semi-private spaces tend to shrink with the growth of public space, transforming what Felson calls the “metropolitan quilt”.
For example, no public transportation system in a large city is without vulnerabilities. Crowded places are easily accessible by a large number of people in a predictable way. However, a crowded place is not necessarily always crowded: The density of the crowd can vary between day and night, depend on the season, and be temporary, as with sporting events, festivals, or unique events [
28] (p. 60).
3. Tessellation of the RMDA Spatial Cut-Out Movements–Displacements
We hypothesized that our personal mobility patterns can be self-explored and described in detail, particular using photographic images taken during the RWs in October 2019 by the researchers. Thus, the essence of our research entailed a synthesis of the factors we encountered, such as “the legibility of semi-public and public/private spaces,” “the permeability of connecting arteries,” and “the spatial awareness of predatory targets”.
To this end, eight RWs are shown in
Table 2 as polygons to replicate the RWs that the researchers engaged in during the year, months, and days under study in the city of Hamburg, Germany. The purpose of our theoretical framework was to trap the reader into self-observations and, in doing so, channel the reader’s ability to read spatial phenomena using the researcher’s mirror.
Our investigation into the likelihood of a predatory criminal event was condensed into 33 factors that relate to the main characteristics of this type of spatial analysis (i.e., urban planning, transportation and mobility systems, safety, the environment, health, education, and communication) and include the following logic:
- ♣
Avoid behaviors that are potentially dangerous for your safety, such as walking in dark spaces, cul-de-sacs, and dead ends;
- ♣
Avoid communities that, for one reason or another, may minimize the effectiveness of monitoring residents and may also feature outbursts of offensive and isolated acts;
- ♣
Comply with road network restrictions related to pedestrians or vehicles and be willing to use buses, taxis, and/or metro transport systems to facilitate comprehensive random walking routes;
- ♣
Take advantage of the possibility to freely update your mobile phone devices in the city;
- ♣
Collect information on the advisability of constraining your own personalized behaviors towards others from all sides of the road;
- ♣
Act as though you are a stranger in the city and have failed to experience all of the lifestyle factors that residents enjoy;
- ♣
Take advantage of opportunities to turn impulsively, refuse to continue, or walk towards goals that have motivated an RW;
- ♣
Look at the extent to which the city is controlled by local police authorities;
- ♣
Imagine what would happen if an intruder did something wrong on a public street;
- ♣
Request information on topics that need to be further developed in the city;
- ♣
Take advantage of free events and exhibitions that you come across by chance [
29].
From the points above, which illustrate the perspectives used for investigating the probability of a predatory criminal event, the following 33 discriminating factors were highlighted: (i) Accessibility for longer travel; (ii) Aerobic practitioners; (iii) Presence of anomalies; (iv) Civil construction hazardous areas; (v) Cul-de-sacs/dark areas/dead-ends; (vi) Cycling facilities; (vii) Disabled facilities; (viii) First-floor entries; (ix) Initiatives to regenerate space; (x) Covered vehicle parking opportunities; (xi) Lighting devices; (xii) Monitoring techniques; (xiii) Noise disturbances; (xiv) Population density; (xv) Presence of green spaces; (xvi) Presence of incivilities; (xvii) Presence of shops (food and beverages); (xviii) Residential clusters; (xix) Shopping opportunities; (xx) Smartphone access (Wi-Fi coverage); (xxi) Speed limiting devices; (xxii) Surrounding visibility points; (xxiii) Traffic collision deterrents; (xxiv) Workplace settings; (xxv) Architectural legibility; (xxvi) Availability of bystanders; (xxvii) Ethnic heterogeneity; (xxviii) Neighborhood awareness; (xxix) New prospects of friendships; (xxx) Pedestrian lifestyle; (xxxi) Width of the road; (xxxii) Topological equipment; and (xxxiii) Meteorological conditions.
3.1. Baseline Categorization for the Discriminant Factor Calculations
To use the 33 discriminant variables for a concrete trend analysis on the occurrence probability of predatory crimes, we borrowed some indexes from the guidelines developed by the Hazard Identification and Evaluation Task Force of the American Chemical Society’s Committee on Chemical Safety in 2015 and weighted the self-attributed scores to the 33 variables. These six indexes are as follows:
- (1)
The “Crime Likelihood” (CriL), with a scale N/A = 0, Rare = 1, Possible = 2, Probable = 3, and Certain = 4.
“CriL” is a categorization index that is calculated and slightly overlaps the general problem analyzed. In this case, beyond the probability that we want to analyze, we also refer to the probability that the police and local authorities calculate based on what the crime probability “predicts”. This factor relates predominantly to the fact that in certain spatial cut-outs considered to be “hot spots”, the probability of crime is symptomatically higher than that in spatial cut-outs not marked by cyclic crime spots.
- (2)
“Communication Feasibility” (ComFea), with a scale of N/A = 0, Rare = 1, Possible = 2, Probable = 3, and Certain = 4;
- (3)
“Unattended Turning Points” (UnTurnP), with the scale N/A = 0, Rare = 1, Possible = 2, Probable = 3, and Certain = 4;
- (4)
“Loneliness Hazards” (LonHaz), with the scale No = 1, Minor = 5, Moderate = 10, and High = 20.
“ComFea” is an index that differentiates the extent to which a communicative exchange is possible in the spatial breaks analyzed. This index is determined by the number of people one can meet and potentially interact with. “UnTurnP” indicates the spatial possibility of suddenly changing movement or being displaced due to unexpected factors that cause the acting subjects to change their initial directions or goals. This can also be determined by atmospheric agents, such as sudden rain or hail, or by human agents, such as a demonstration parade or an unscheduled advertisement for the opening of a new shop near the random walker. “LonHaz” is an antithetical index of “ComFea” and precisely indicates the impossibility of meeting someone or the inability to communicate between parts of the population (for example, due to language difficulties or ethnic diversity).
- (5)
“Mistakes’ Severe Consequences” (MisSevCon), with the scale No = 1, Minor = 5, Moderate = 10 and High = 20.
“MisSevCon” is an index characterized by the chance that errors due to inexperience, recklessness, or one’s own fault will be followed by even more serious consequences, such as a car accident due to drunk driving.
- (6)
“Relative Magnitude of Crimes” (RelMaCri), with the scale No = 1, Minor = 5; Moderate = 10 and high = 20.
“RelMaCri” is a complementary categorization index determined by systems theory and integrated throughout this research. This index refers to the size, scale, or importance attached to the categories chosen and the highlighted discriminating factors. This factor means that we, who are not mathematicians or real geographers (but are users of programs freely available on the web) acquire ideas about the definitions of real and complex numbers and spaces vectors (Euclidean, normed, or pseudo-Euclidean) and can learn how to apply calculations in a more coherent way by asking experts about the adequacy of the logarithmic quantities and how to define the correct angles for the perspectives on solids and plane figures (ordered by areas or paths) and line segments (ordered by lengths and edges).
From the 33 discriminating factors auto-calculated based on the six indices, we developed the following simple basic categorization (BC) for the scores:
Using the BC (Basic categorization), we highlighted how “accessibility to longer journeys” can be attractive from the perspective of the probability of a predatory event (in practice, the “CriL”, such as an event planned by the police) for a random walker in addition to the use of the “ComFea” in the same category added to the score obtained for unexpected events for which such accessibility can result in “UnTurnP”. This score was then multiplied by the score obtained by adding the “LonHaz” provided by this same factor, the possibility that “MisSevCon” could occur, and “RelMaCri”, which can be self-assessed by considering this category.
To give another example, the “RelMaCri” when considering this category (i.e., “accessibility to longer journeys”) is certainly lower than that which would be activated if the category “Lighting infrastructure” were self-assessed. The lack of lighting infrastructure and the consequent blurring of both territorial and related information for the RMDA would certainly lead to a greater risk of accessibility for longer journeys.
Table 3 shows the scores obtained by the researchers in their self-assigned pre-assessments based on the discriminating factors using weighted self-observation variables for the six indexes described above. Codes for the discriminating factors are exemplified at
Table A2.
3.2. From Models to Probability Metrics
To transform our basic ordinal categorization into an interval scale, we need to construct a sum of all probability estimates that would give 1.00. However, this result may be incorrect because we must also assign a probability to the event that “nothing happens” to ensure that the sum is 1.00 (or 100).
For scores from 1 to 20, we move to a weight scale due to a problem of consistency with the previous variables. The scale must, therefore, be reformulated in the range 0 to 4, as follows: “High probability of major predatory behavior” scaled to 20 and divided by the maximum:
- ♣
Category 1−1 = 1/20 = 0.05.
- ♣
Category 2−5 = 5/20 = 0.25.
- ♣
Category 3−10 = 10/20 = 0.50.
- ♣
Category 4−20 = 20/20 = 1.0.
The total is 1.80, from which it can be deduced that:
- ▪
0.00/1.8 = 0.00 (absence of events: Nothing happens);
- ▪
0.05/1.8 = 0.02 (2% probability of high predatory behavior, equivalent to a 98% probability that nothing will happen), total probability 100%;
- ▪
0.25/1.8 = 0.14 (14% probability of high predatory behavior, equivalent to an 86% probability of nothing happening), total probability 100%;
- ▪
0.5/1.8 = 0.28 (28% probability of high predatory behavior, equivalent to a 72% probability that nothing will happen), total probability 100%;
- ▪
1/1.8 = 0.55 (55% probability of high predatory behavior, equivalent to a 45% probability of nothing happening), total probability 100%.
Therefore, the total probability that a high predatory event will occur is 0.02 + 0.14 + 0.28 + 0.55 = 1.0 (100%).
As per the standard on-line model by the American Chemical Society Chemical Safety Committee from 2015 (see
https://www.acs.org/content/dam/acsorg/about/governance/committees/chemicalsafety/hazard-assessment/table-f-2-laboratory-hazard-risk-assessment-matrix-template.docx), the basis for categorizing the probability of predatory events in our case is calculated based on how the variables (i.e., the 33 discriminating factors) taken into account are self-assessed as attractors of the possible predatory event (indices 1, 2, and 3 with values of 0, 1, 2, 3, and 4) and what existing control measures (detraction) are in place through the chosen discriminant factors (indices 3, 4, and 5 with values of 1, 5, 10, and 20).
Figure 4 below explains that a perspective tessellation aligns with our method.
Some events had 100% probability. We were aware that at the end of this research a certain metric would emerge, so we tried to limit this study to the best possible methods based on our abilities.
Table 4 shows the transformation of scores obtained by the self-assessment in
Table 3 with the coefficients obtained through a list of self-rated adjectives useful for self-describing urban environments. Subsequently, we rescheduled our BC according to a range of 0–4.
The list of self-assigned adjectives related to the urban environment in the search for a response theory model (IRT) is provided below in
Table 5. The calculations are very basic for the metrics and reflect the limitations of the study due to the constant number of factors involved in a particular problem like the one being analyzed. Codes for the discriminating factors are always exemplified at
Table A2.
Thus, the 24 discriminating factors following the reduction of the 33 initial factors were self-assessed with a preliminary rough score based on the researchers’ memories of the photographs of the spatial clippings considered and normalized using the coefficients obtained via the self-attribution of responses to the self-administered questionnaire presented in the
Table A1.
Our next step was to transform the data in
Table 3 representing our ordinal base categorization into an interval-scale measurement table with scores between 0 and 4, i.e., 0 = 0 (no event); 1 = 0.10 (10%); 2 = 0.20 (20%); 3 = 0.30 (30%); and 4 = 0.40 (40%).
The self-attribution of scores up to this point was achieved through a hypothetical analysis, which, itself, provided questions, answers, probabilities, consequences, and recommendations related to the subject under study.
4. Discriminating Factors and Behaviors to Cross-Check the Likelihood of Predatory Crimes
Configurational and Systemic Behaviors in Hamburg
Interesting conversions on distance and measurement issues, which are deeply related to these node/edge processes, are likely to be discussed in the future. Additionally, we have shown how to identify whether a particular urban spatial culture stems from a sustainable historical planning process, a random process, or a combination of both.
We developed a spatial scenario modeling method using a combination of analytical and stochastic methods. We achieved this by extending the systems position to the interweaving of similar critical elements based on the criminology and sociology of culture and in conjunction with the available spatial information, described here in terms of perspective tessellation of the full path of RWs derived from the Google Maps timeline.
Efforts were made to locate paths, points, and location errors to provide a measurement that, even if correctly plotted from the standpoint of the simulation outcomes, would still be misleading.
This project aimed to demonstrate how the likelihood of the occurrence of predatory crimes is lower when discriminating factors, weighted by summarizing the multifaceted themes of the six indexes and framing and reframing the discourse around behavioral self-investigation in the downtown area, are devoted to the identification, discussion, and understanding of the possible interrelationships of theoretical disciplinary components, recognizing the prospective reformulation of problems based on their systemic properties.
5. Materials and Methods
The distance that the random walker moves or the possibility that the walker will modify his/her original path choices are calculated based on the 24 discriminating factors across the BC, as illustrated above, and depending on the different conditions with which the urban environment is self-described.
Assuming that the reaction time is one second, the total space of the movement–displacement of an RMDA is expressed by the following formula:
where the coefficient of adhesion to the path taken,
depends on the conditions of the urban environment self-assessed by the researchers in
Table 5.
Table 6 below represents the spatial cut-outs we have extracted from the web in 3D Google Earth to infer outcomes in the research.
In other words, all that constitutes a correct whole—that is, a view of the world that adheres to reality—exists only in the mind of an experienced physical engineer who can seriously reflect on sets of scientific materials that are sometimes downright opposed.
The socio-systemic author, for his part, reflected his/her own unique personality in the investigation and nourished it with sensory and humanistic characteristics from which little or nothing can contribute to the actual metrics of the entire system. It goes without saying that the universe of potential problems barely touched upon this subject in our article. However, our positions represent important basic approaches and, in a sense, the means by which others (i.e., physical engineers) can reflect on sets of scientific materials.
The result of our analysis is somewhat artificial but bordering on a true sequential investigation. We included the simultaneous interrelationships of places and the feelings that arose in the desire to support the data.
Table A5 shows the nodes that started and ended during our self-investigation of the spatial cut-outs based on the Haversine distance calculations [
30].
We treated the problem of geographical interest in a logical and rigorous way (although some points were not easily accessible in our case) but were trapped by the abstraction of realities. We only partially captured the realities of Hamburg; given their concrete nature, these realities would have required many revisions to be consistent with the experimental evidence.
Our first 24 hypotheses (in a previous version condensed into just five hypotheses; see
Table A2 and
Table A3 for a list of independent and latent variables according to MIMIC Multiple Indicator Multiple Causes) were as follows:
Hypothesis 1 (H1). Triangulation of (a) spatial data, (b) self-awareness, and (c) behavioral self-investigation in the city center of Hamburg allows the random interceptions of longer travel distances by walkers and improves the quality of life in the city;
Hypothesis 2 (H2). Triangulation of (a) spatial data, (b) self-awareness, and (c) behavioral self-investigation in the Hamburg city center allows the random interception of aerobic practitioners by walkers and improves the quality of life in the city;
Hypothesis 3 (H3). A triangulation (a) of spatial data, (b) of self-awareness, and (c) of behavioral self-investigation in the city center of Hamburg allows the random interception of the presence of anomalies by walkers and improves the quality of life in the city;
Hypothesis 4 (H4). Triangulation of (a) spatial data, (b) self-awareness, and (c) behavioral self-investigation in the city center of Hamburg allows the random interception of civil construction hazardous areas by walkers and improves the quality of life in the city;
Hypothesis 5 (H5). A triangulation of (a) spatial data, (b) self-awareness, and (c) behavioral self-investigation in downtown Hamburg allows the random interception of cul-de-sacs/dark areas/dead ends by walkers and improves the safety of the city;
Hypothesis 6 (H6). Triangulation of (a) spatial data, (b) self-awareness, and (c) behavioral self-investigation in the Hamburg city center allows the random interception of cycling facilities by walkers and improves the quality of life in the city;
Hypothesis 7 (H7). A triangulation of (a) spatial data, (b) self-awareness, and (c) behavioral self-investigation in the Hamburg city center allows the random interception of disabled facilities by walkers and improves the quality of life in the city;
Hypothesis 8 (H8). A triangulation of (a) spatial data, (b) self-awareness, and (c) behavioral self-investigation in downtown Hamburg allows the random interception of first-floor entries by walkers and improves safety in the city;
Hypothesis 9 (H9). A triangulation of (a) spatial data, (b) self-awareness, and (c) behavioral self-investigation in downtown Hamburg allows the random interception by walkers of initiatives to regenerate space and improve the quality of life in the city;
Hypothesis 10 (H10). Triangulation of (a) spatial data, (b) self-awareness, and (c) behavioral self-investigation in downtown Hamburg allows the random interception of covered vehicle parking opportunities by walkers and improves the safety in the city.
And so on, up to H
n no. 24. Our event—the likelihood of predatory crimes in downtown Hamburg—was, therefore, not elementary (compound) because all of its alleged events can be broken down into several elementary events.
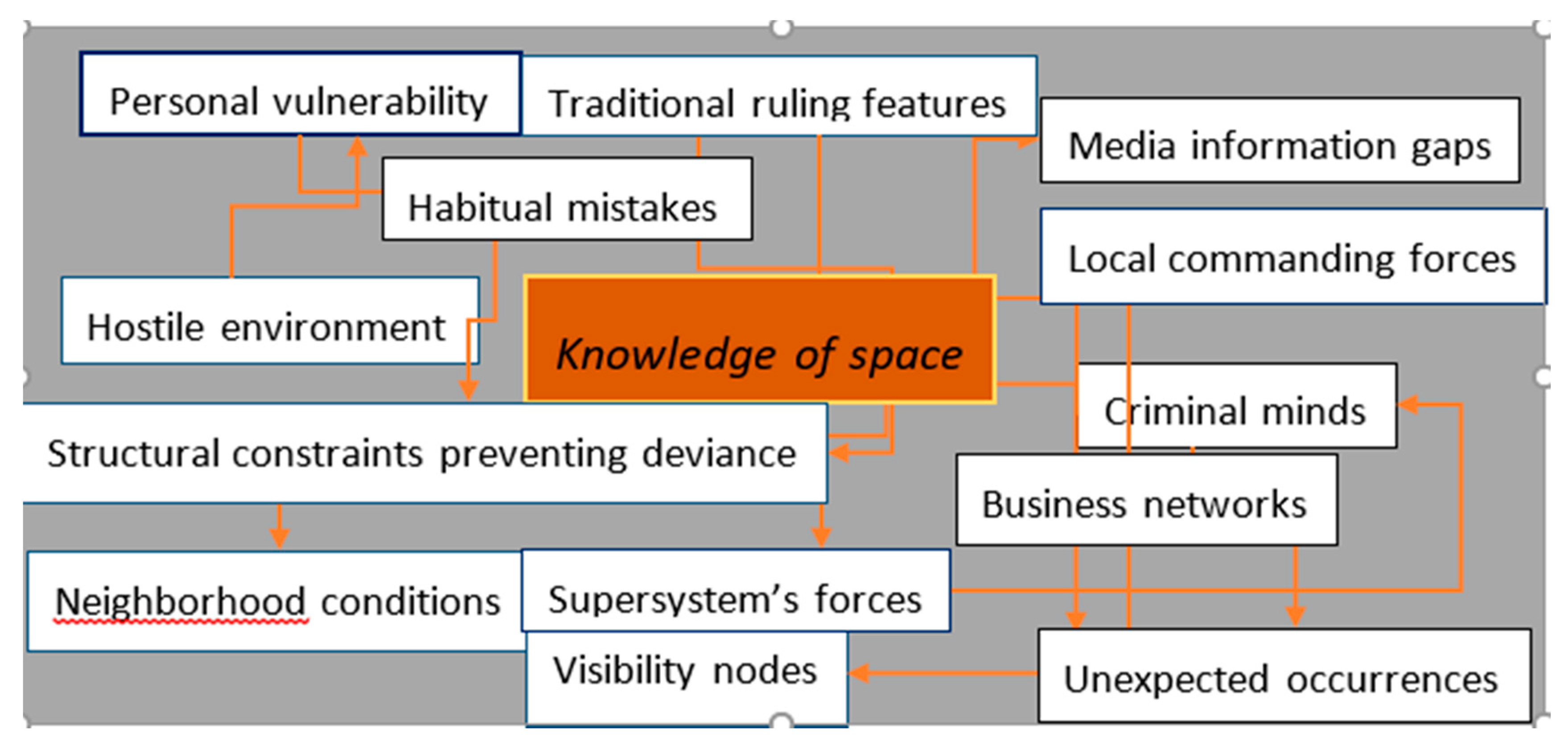
Figure 5 below is a graphical representation of the system theory by Luhmann.
6. Conclusions: Systematic Errors and Random Fluctuations
This is not a point by point simulation but instead a type of proportional sampling. The simulation of each RW generated hundreds of estimates for each change in direction, which was proportional to the imagined number of discriminating factors considered to be part of the spatial cut-outs considered. A complete estimate of the standard deviations of the movements–displacements provided by the random walker during the RWs was not calculated at this stage.
The static nature and fallibility of algorithmic models, which sometimes, in the application of crime prevention policies and programs, statistically process information with a higher or lower probability of crime (especially through the analysis of the hot spots) suggests that determining the targets to intervene in and the population at risk of crime remains a challenge [
31,
32,
33] because criminals and targets are mobile in space and time and also because quantitative estimates of these moving populations are often not available or are inferred inaccurately using existing data.
Further, as illustrated by the scores obtained on the configurational scale of our cone of uncertainty on the probability of predatory events in the city of Hamburg, there are no variables indicating the presence of a permanent police station, no variables that illustrate how heavy the night economy weighs in each cut-out considered, and no indicators that can link the perception of the district (quiet, affluent, disadvantaged, etc.) to the presence of predatory behavior. Finally, there are no indicators on the presence of public transport (stops, stations) or on the associated infrastructure and presence of typical recreational activities (cinemas, theaters, etc.).
Even the variable on urban reconditioning initiatives does not really indicate whether such initiatives are ongoing or currently in the planning stage. Clearly, indicators on regeneration or intervention operations already carried out in public spaces could provide an improvement in the physical security of potential victims or at least an architectural barrier for potential aggressors.
Finally we observed no indicators on the difference between day and night (temporal timing), as our RMDA moved back mainly to follow her study program for a famous German institution focusing on the dissemination of the German language in the world, and she did not take part in any night or recreational initiative outside of office hours.
This result is also likely because our RDMA crossed the spatial scale diagonally and neglected the use of resources, including police alerts at high risk locations. Indeed, one has a higher likelihood of being a victim of a crime if one is a stranger in a location compared to a member of the community or a long-term resident of the same location. The results, above all else, correspond to the orientation of the RMDA, which is the foundation of the dynamic nature of the criminogenic models highlighted in our paper and also questions the spatio-temporal allocation of the strategies in this article.
Our observations and associated self-analyses entail several philosophical and socio-psychological hypotheses concerning the adaptation of the elements of analysis to a concept that harmonizes subjective and negotiated realities.
The result provides a basis for analysis and design that meets the specific needs of the researcher. We are trapped by our basic image of reality, which is dominated by strong quantitative limitations, caused not so much by ignorance but by the haste to illustrate everything immediately, regardless of the “real” purpose contained in the system that we have designed. Precisely, the aim of this article was to review using methods of self-analysis and self-observation criteria that may also be proficient in ascribing validity to any scientific communication but are contravened by our inability to place them metrically at their appropriate optima. This awareness has often constituted both an enormous limitation and an unlimited force of expressiveness for us. Everything that was most appropriate for this analysis has been checked and detailed to the limits of our understanding and thus has often been distorted, repressed, depressurized, and re-condensed in alternating phases.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




























































































