Development of a Chinese Chess Robotic System for the Elderly Using Convolutional Neural Networks




Abstract
1. Introduction
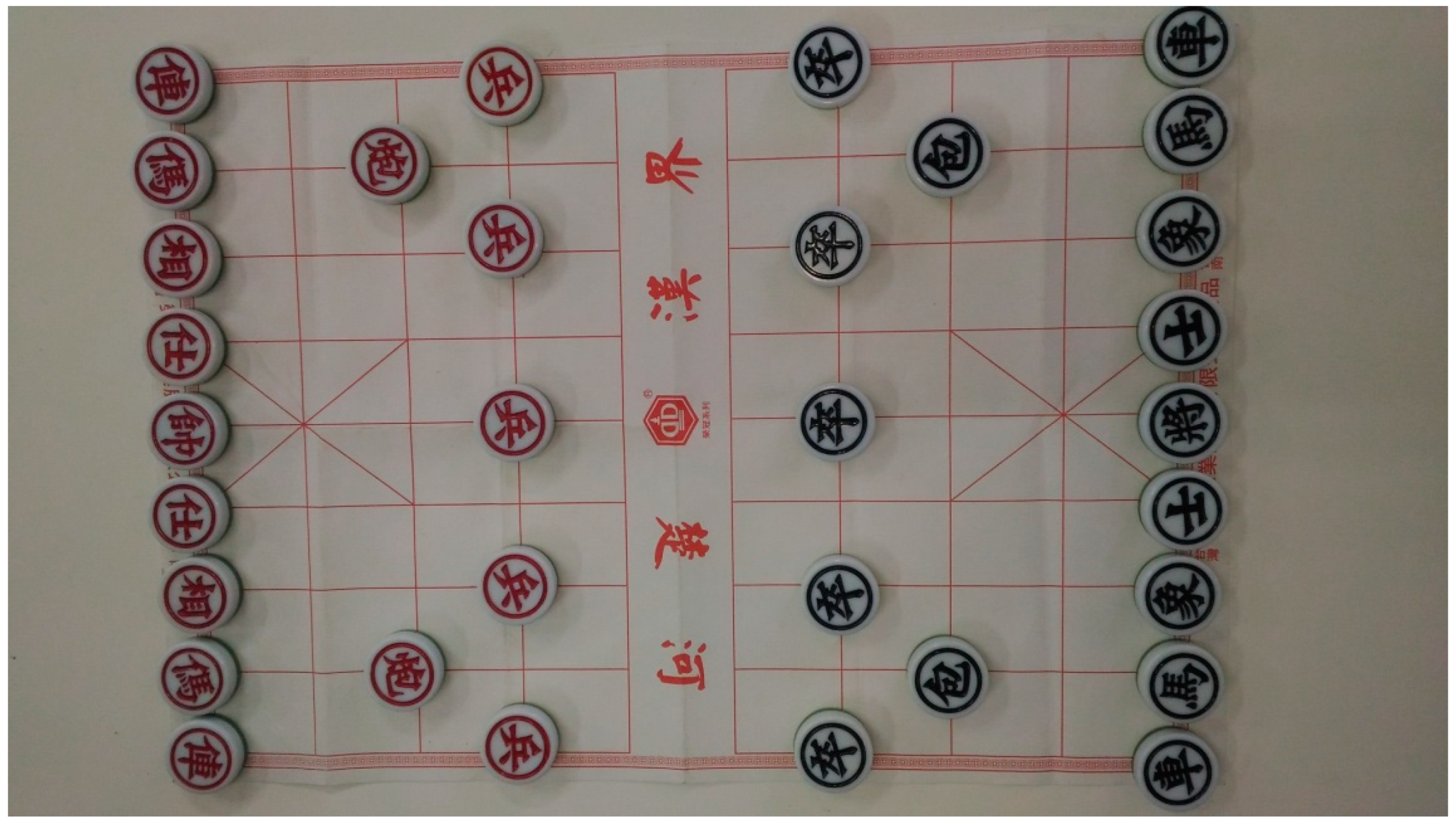
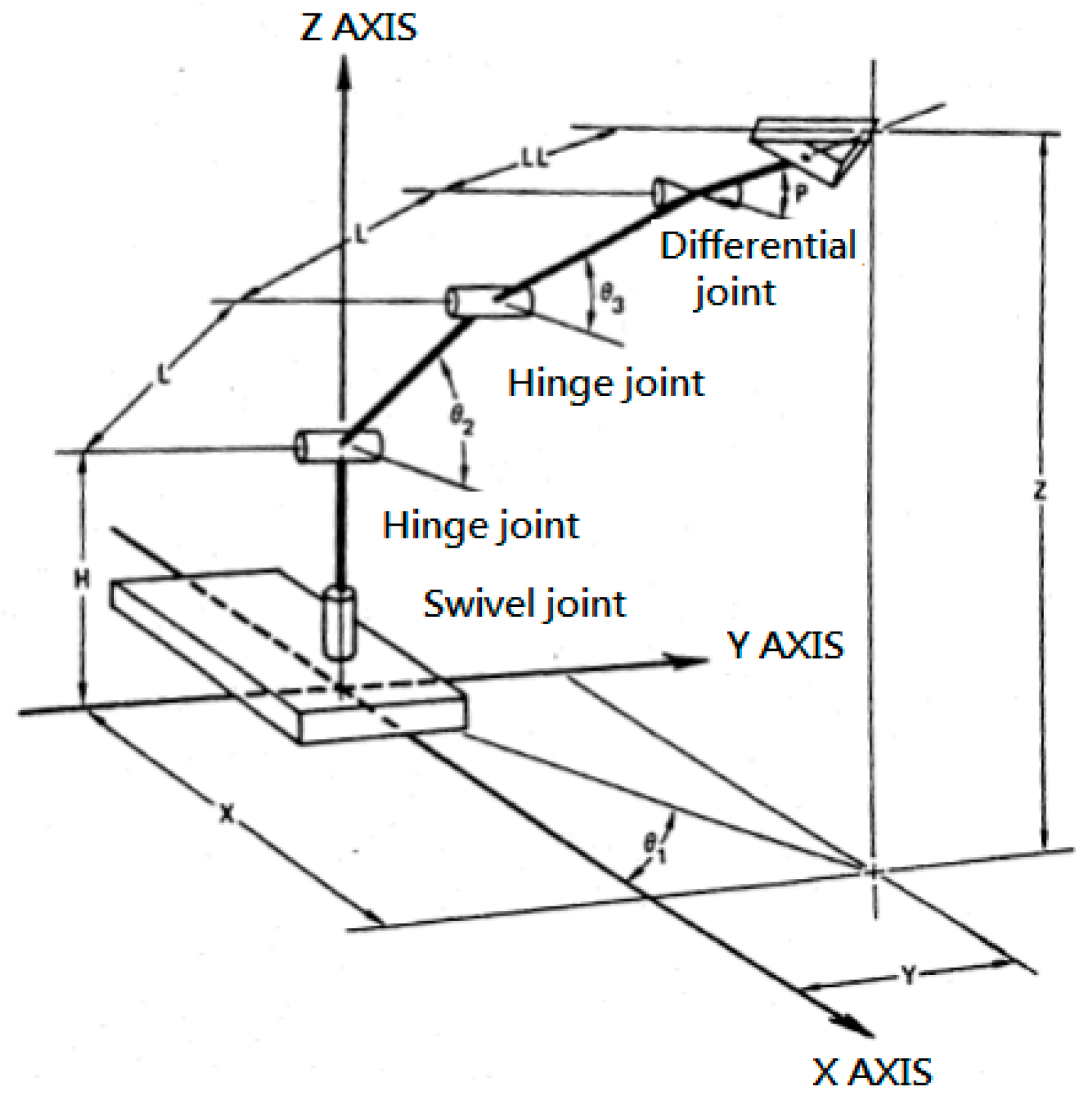
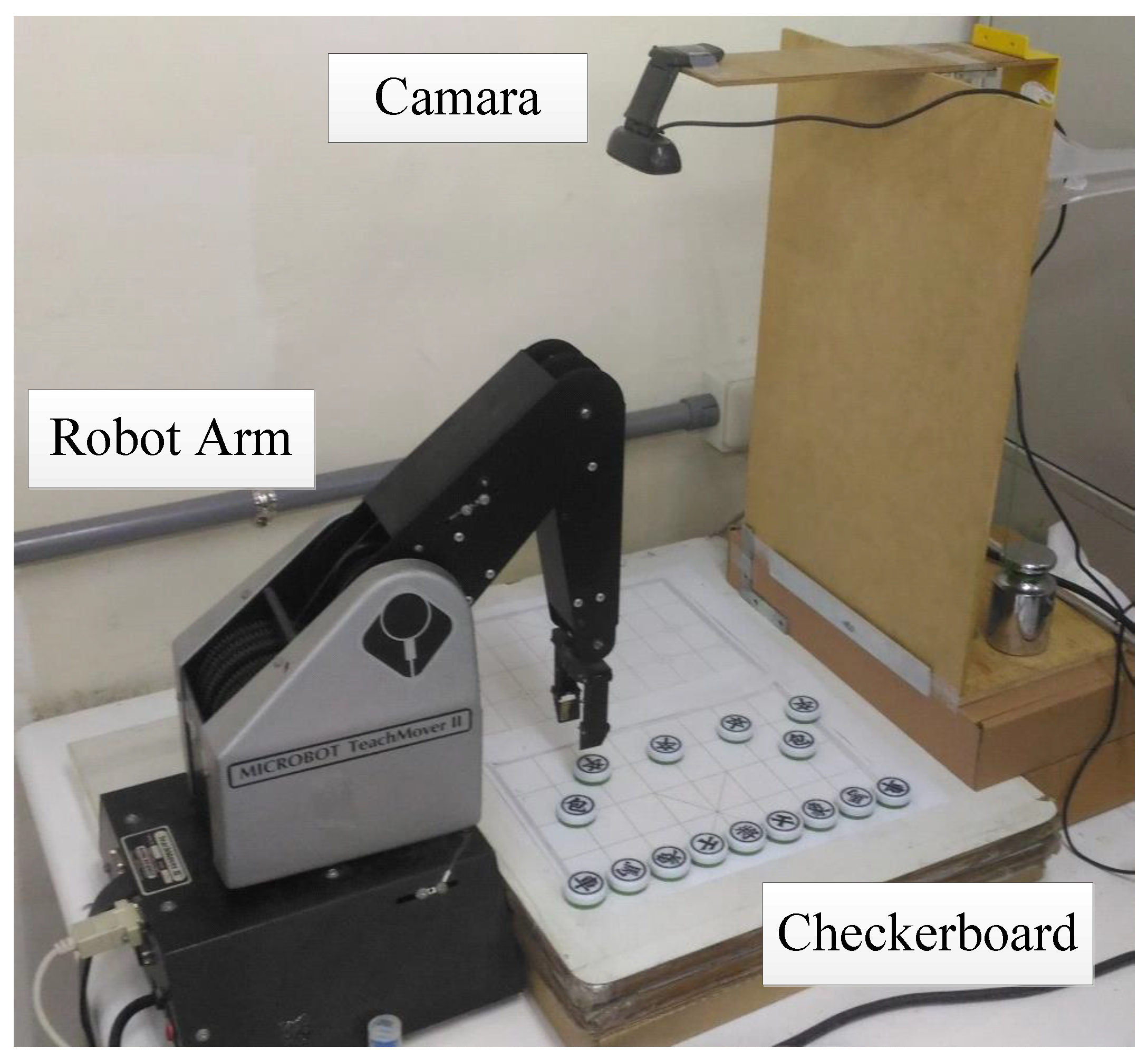
2. Chinese Chess Robotic System
3. Convolutional Neural Network
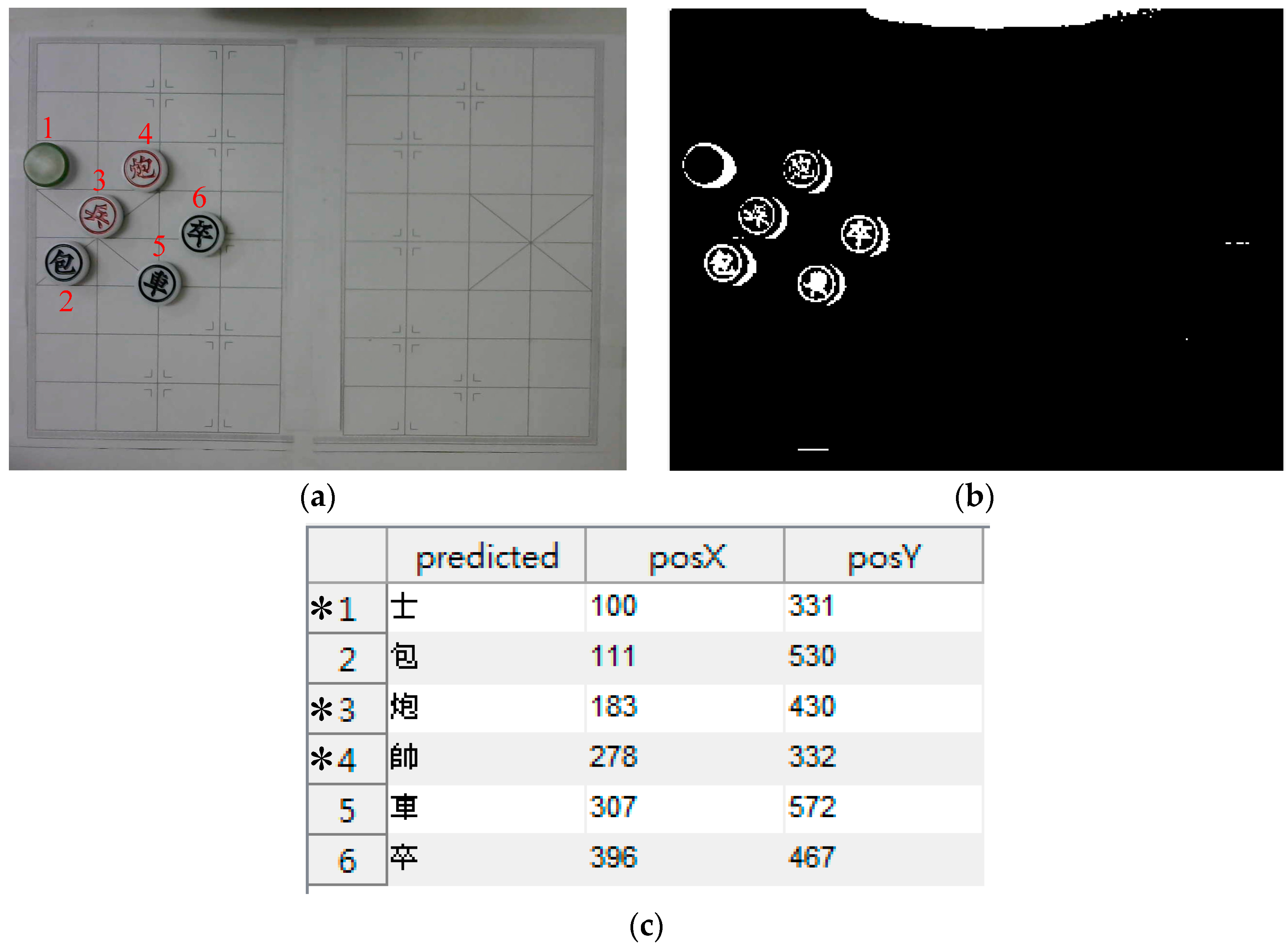
4. Experimental Results
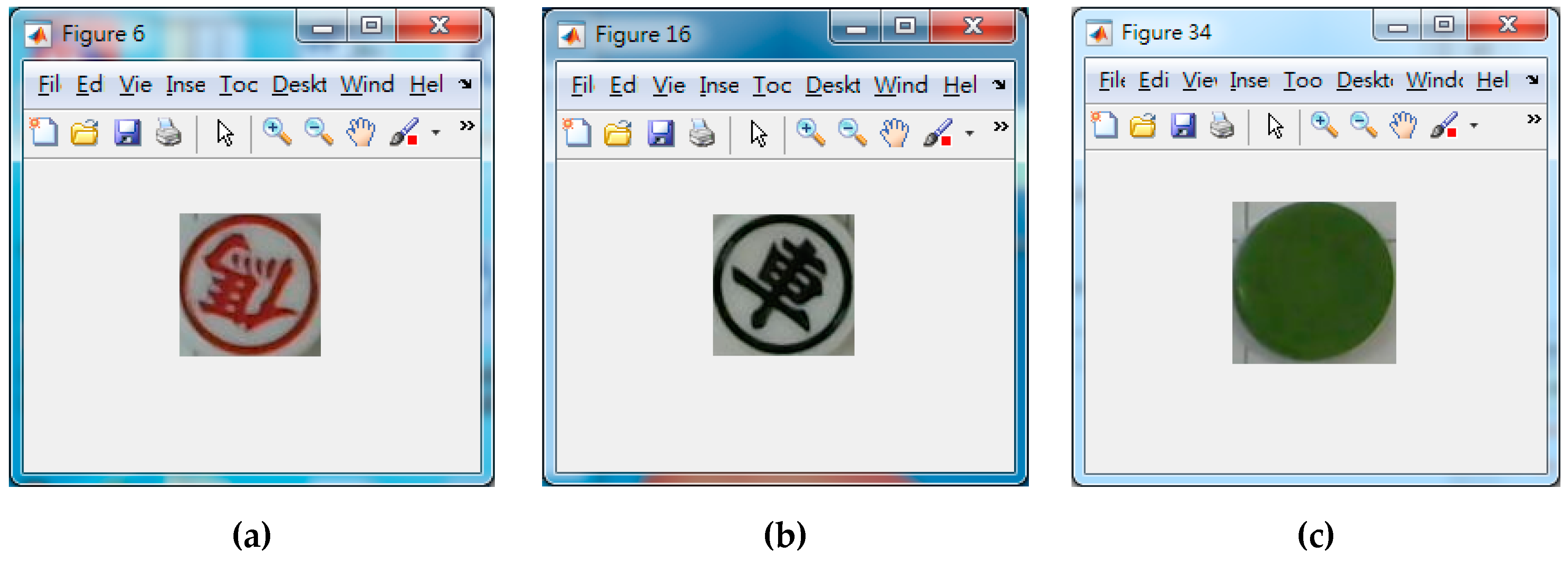
- (a)
- If the values in all four directions are 0, then a new label is created at that position;
- (b)
- If the labels in the four directions are the same, then the position label is the label of its field;
- (c)
- If the labels in the four directions have two different labels, choose one of them, and record the two different labels.
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- 認識失智症 (Recognize Dementia). Available online: http://www.tada2002.org.tw/About/IsntDementia (accessed on 20 March 2020).
- Ukida, H.; Terama, Y.; Ohnishi, H. Object tracking system by adaptive pan-tilt-zoom cameras and arm robot. In Proceedings of the 2012 SICE Annual Conference, Akita, Japan, 20–23 August 2012. [Google Scholar]
- Lin, C.-J.; Shaw, J.; Tsou, P.-C.; Liu, C.-C. Vision servo based Delta robot to pick-and-place moving parts. In Proceedings of the 2016 IEEE International Conference on Industrial Technology (ICIT), Taipei, Taiwan, 14–17 March 2016. [Google Scholar]
- Althloothi, S.; Mahoor, M.H.; Zhang, X.; Voyles, R.M. Human Activity Recognition Using Multi-features and Multiple Kernel Learning. Pattern Recognit. 2014, 47, 1800–1812. [Google Scholar] [CrossRef]
- Jalal, A.; Kamal, S.; Kim, D. Shape and motion features approach for activity tracking and recognition from kinect video camera. In Proceedings of the 2015 IEEE 29th International Conference on Advanced Information Networking, Gwangiu, Korea, 24–27 March 2015. [Google Scholar]
- Song, Y.; Tang, J.; Liu, F.; Yan, S. Body Surface Context: A New Robust Feature for Action Recognition from Depth Videos. IEEE Trans. Circuits Syst. Video Technol. 2014, 24, 952–964. [Google Scholar] [CrossRef]
- Ge, Y.; Xiong, Y.; Tenorio, G.L.; From, P.J. Fruit Localization and Environment Perception for Strawberry Harvesting Robots. IEEE Access 2019, 7, 147642–147652. [Google Scholar] [CrossRef]
- Chen, Z.; Zhou, D.; Liao, H.; Zhang, X. Precision Alignment of Optical Fibers Based on Telecentric Stereo Microvision. IEEE/ASME Trans. Mechatron. 2016, 21, 1924–1934. [Google Scholar] [CrossRef]
- Jalal, A.; Kamal, S.; Kim, D. A Depth Video Sensor-based Life-logging Human Activity Recognition System for Elderly Care in Smart Indoor Environments. Sensors 2014, 14, 11735–11759. [Google Scholar] [CrossRef]
- Jalal, A.; Uddin, M.Z.; Kim, J.T.; Kim, T.S. Daily human activity recognition using depth silhouettes and R transformation for smart home. In Proceedings of the Smart Homes Health Telematics, Montreal, QC, Canada, 20–22 June 2011. [Google Scholar]
- Jalal, A.; Zeb, M.A. Security enhancement for e-learning portal. Int. J. Comput. Sci. Netw. Secur. 2008, 8, 41–45. [Google Scholar]
- Landan, M.I. E-commerce security issues. In Proceedings of the IEEE Conference on Future Internet of Things and Cloud, Barcelona, Spain, 27–29 August 2014. [Google Scholar]
- Jalal, A.; Shazad, A. Multiple facial feature detection using vertex-modeling structure. In Proceedings of the IEEE Conference on Interactive Computer Aided Learning, Villach, Austria, 26–28 September 2007. [Google Scholar]
- Jalal, A.; Uddin, I. Security architecture for third generation (3G) using GMHS cellular network. In Proceedings of the IEEE Conference on Emerging Technologies, Patras, Greece, 25–28 January 2007. [Google Scholar]
- Jalal, A.; Sarif, N.; Kim, J.T.; Kim, T.S. Human Activity Recognition via Recognized Body Parts of Human Depth Silhouettes for Residents Monitoring Services at Smart Homes. Indoor Built Environ. 2013, 22, 271–279. [Google Scholar] [CrossRef]
- Manwatkar, P.M.; Yadav, S.H. Text recognition from images. In Proceedings of the 2015 International Conference on Innovations in Information, Embedded and Communication Systems (ICIIECS), Coimbatore, India, 1–6 March 2015. [Google Scholar]
- Lara, O.D.; Labrador, M.A. A Survey on Human Activity Recognition using Wearable Sensors. IEEE Commun. Surv. Tutor. 2013, 15, 1192–1209. [Google Scholar] [CrossRef]
- Jalal, A.; Kim, J.T.; Kim, T.S. Development of a life logging system via depth imaging based human activity recognition for smart homes. In Proceedings of the 8th International Symposium on Sustainable Healthy Buildings, Seoul, Korea, 19 September 2012. [Google Scholar]
- Jalal, A.; Kamal, S.; Kim, D. Human Depth Sensors-Based Activity Recognition Using Spatiotemporal Features and Hidden Markov Model for Smart Environments. J. Comput. Netw. Commun. 2016, 2016, 1–11. [Google Scholar] [CrossRef]
- Yang, A.Y.; Iyengar, S.; Sastry, S.; Bajcsy, R.; Kuryloski, P.; Jafari, R. Distributed segmentation and classification of human actions using a wearable motion sensor network. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition Workshops, Anchorage, AK, USA, 23–28 June 2008. [Google Scholar]
- Wen, Y.C. Chinese-Chess Image Recognition by using Feature Comparison Techniques. Appl. Math. Inf. Sci. 2014, 8, 2443–2453. [Google Scholar]
- Arisandi, D.; Rahmat, R.F.; Nababan, E.B. Chinese chess character recognition using direction feature extraction and backpropagation. In Proceedings of the 2016 International Conference on Data and Software Engineering (ICoDSE), Denpasar, Indonesia, 26–27 October 2016. [Google Scholar]
- Gui, W.; Jun, T. Chinese chess recognition algorithm based on computer vision. In Proceedings of the 26th Chinese Control and Decision Conference, Changsha, China, 31 May–2 June 2014. [Google Scholar]
- Rosenblatt, F. The Perceptron: A Probabilistic Model for Information Storage and Organization in the Brain. Psychol. Rev. 1958, 65, 386–408. [Google Scholar] [CrossRef] [PubMed]
- Kamal, S.; Jalal, A.; Kim, D. Depth Images-based Human Detection, Tracking and Activity Recognition Using Spatiotemporal Features and Modified HMM. J. Electr. Eng. Technol. 2016, 11, 1921–1926. [Google Scholar] [CrossRef]
- Siswanto, A.R.S.; Nugroho, A.S.; Galinium, M. Implementation of face recognition algorithm for biometrics based time attendance system. In Proceedings of the 2014 International Conference on ICT for Smart Society (ICISS), Bandung, Indonesia, 24–25 September 2014. [Google Scholar]
- Tripathy, A.K.; Carvalho, R.; Pawaskar, K.; Yadav, S.; Yadav, V. Mobile based healthcare management using artificial intelligence. In Proceedings of the 2015 International Conference on Technologies for Sustainable Development (ICTSD), Mumbai, India, 4–6 February 2015. [Google Scholar]
- Khurana, P.; Sharma, A.; Singh, S.N.; Singh, P.K. A survey on object recognition and segmentation techniques. In Proceedings of the IEEE International Conference on computing for sustainable Global Development, New Delhi, India, 16–18 March 2016. [Google Scholar]
- Jalal, A.; Kamal, S.; Kim, D. Depth silhouettes context: A new robust feature for human tracking and activity recognition based on embedded HMMs. In Proceedings of the 12th IEEE International Conference on Ubiquitous Robots and Ambient Intelligence, Goyang, Korea, 25–28 October 2015. [Google Scholar]
- Jalal, A.; Kim, Y.H.; Kim, Y.J.; Kamal, S.; Kim, D. Robust Human Activity Recognition from Depth Video using Spatiotemporal Multi-fused Features. Pattern Recognit. 2017, 61, 295–308. [Google Scholar] [CrossRef]
- Kamal, S.; Meza, C.A.A.; Lee, K. Family of Nyquist-I Pulses to Enhance Orthogonal Frequency Division Multiplexing System Performance. IETE Tech. Rev. 2016, 33, 187–198. [Google Scholar] [CrossRef]
- Farooq, A.; Jalal, A.; Kamal, S. Dense RGB-D Map-Based Human Tracking and Activity Recognition using Skin Joints Features and Self-Organizing Map. KSII Trans. Internet Inf. Syst. 2015, 9, 1856–1869. [Google Scholar]
- Kamal, S.; Jalal, A. A Hybrid Feature Extraction Approach for Human Detection, Tracking and Activity Recognition Using Depth Sensors. Arab. J. Sci. Eng. 2016, 41, 1043–1051. [Google Scholar] [CrossRef]
- Yacoob, N.I.; Tahir, N.M. Feature selection for gait recognition. In Proceedings of the IEEE Symposium on Humanities, Science and Engineering Research, Kuala Lumpur, Malaysia, 24–27 June 2012. [Google Scholar]
- Martin, A.G.; Martinez, J.M. People Detection in Surveillance: Classification and Evaluation. IET Comput. Vis. 2015, 9, 779–788. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Adv. Neural Inf. Process. Syst. 2012, 25, 1097–1105. [Google Scholar] [CrossRef]
- Jin, J.; Fu, K.; Zhang, C. Traffic Sign Recognition with Hinge Loss Trained Convolutional Neural Networks. IEEE Trans. Intell. Transp. Syst. 2014, 15, 1991–2000. [Google Scholar] [CrossRef]
- Chen, X.; Xiang, S.; Liu, C.; Pan, C. Vehicle Detection in Satellite Images by Hybrid Deep Convolutional Neural Networks. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1797–1801. [Google Scholar] [CrossRef]
- Abdel-Hamid, O.; Mohamed, A.; Jiang, H.; Deng, L.; Penn, G.; Yu, D. Convolutional Neural Networks for Speech Recognition. IEEE/ACM Trans. Audio Speech Lang. Process. 2014, 55, 1533–1545. [Google Scholar] [CrossRef]
- Más de 20 Años Creando Soluciones Especializadas en TI. Available online: http://www.teachmover.com/ (accessed on 20 March 2020).
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Rabinovich, A. Going deeper with convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR’15), Boston, MA, USA, 1–9 June 2015. [Google Scholar]
- Du, Y.C.; Muslikhin, M.; Hsieh, T.H.; Wang, M.S. Stereo Vision-Based Object Recognition and Manipulation by Regions with Convolutional Neural Network. Electronics 2020, 9, 210. [Google Scholar] [CrossRef]
- What Is Camera Calibration? Available online: http://www.mathworks.com/help/vision/ug/camera-calibration.html (accessed on 20 March 2020).
- Connected-Component Labeling. Available online: https://en.wikipedia.org/wiki/Connected-component_labeling (accessed on 20 March 2020).
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Motor | Joint | Steps Per Degree |
|---|---|---|
| 1 | Base | 19.64 |
| 2 | Shoulder | 19.64 |
| 3 | Elbow | 11.55 |
| 4 | Right wrist | 4.27 |
| 5 | Left wrist | 4.27 |
| Link | Joint Name | ||||
|---|---|---|---|---|---|
| 1 | Base | 0 | |||
| 2 | Shoulder | L | 0 | 0 | |
| 3 | Elbow | L | 0 | 0 | |
| 4 | Pitch | 0 | 0 | ||
| 5 | Roll | 0 | 0 | LL |
| Chessman | Rotating Degree | |||||
|---|---|---|---|---|---|---|
| 0° | 45° | 90° | 105° | 120° | 180° | |
| 將 | 0 | 0 | 0 | 0 | 0 | 0 |
| 士 | 0 | 0 | 0 | 0 | 0 | 0 |
| 象 | 0 | 0 | 0 | 0 | 0 | 0 |
| 車 | 0 | 0 | 0 | 0 | 0 | 0 |
| 馬 | 0 | 0 | 0 | 0 | 0 | 0 |
| 包 | 0 | 0 | 0 | 0 | 0 | 0 |
| 卒 | 0 | 0 | 0 | 0 | 0 | 0 |
| 帥 | 0 | 0 | 0 | 0 | 0 | 0 |
| 仕 | 0 | 0 | 0 | 0 | 0 | 0 |
| 相 | 0 | 0 | 0 | 0 | 0 | 0 |
| 俥 | 0 | 0 | 0 | 1 | 1 | 2 |
| 傌 | 0 | 0 | 0 | 0 | 0 | 1 |
| 炮 | 0 | 0 | 0 | 1 | 2 | 2 |
| 兵 | 0 | 0 | 0 | 0 | 0 | 0 |
| Actual Class | ||||||||
|---|---|---|---|---|---|---|---|---|
| Predicted class | 將 | 士 | 象 | 車 | 馬 | 包 | 卒 | |
| 將 | 100 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 士 | 0 | 100 | 0 | 0 | 0 | 0 | 0 | |
| 象 | 0 | 0 | 100 | 0 | 0 | 0 | 0 | |
| 車 | 0 | 0 | 0 | 100 | 0 | 0 | 0 | |
| 馬 | 0 | 0 | 0 | 0 | 100 | 0 | 0 | |
| 包 | 0 | 0 | 0 | 0 | 0 | 100 | 0 | |
| 卒 | 0 | 0 | 0 | 0 | 0 | 0 | 100 | |
| Actual Class | ||||||||
|---|---|---|---|---|---|---|---|---|
| Predicted class | 帥 | 仕 | 相 | 俥 | 傌 | 炮 | 兵 | |
| 帥 | 100 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 仕 | 0 | 100 | 0 | 0 | 0 | 0 | 0 | |
| 相 | 0 | 0 | 100 | 0 | 0 | 0 | 0 | |
| 俥 | 0 | 0 | 0 | 97 | 0 | 4 | 0 | |
| 傌 | 0 | 0 | 0 | 0 | 98 | 0 | 0 | |
| 炮 | 0 | 0 | 0 | 3 | 2 | 96 | 0 | |
| 兵 | 0 | 0 | 0 | 0 | 0 | 0 | 100 | |
| Real Coordinate | Coordinate before Correction | Error | Coordinate after Correction | Error |
|---|---|---|---|---|
| (64,483) | (50,488) | 14.86 | (64.9,486) | 3.13 |
| (188,578) | (175,581) | 13.34 | (186.2,578) | 1.8 |
| (186,379) | (174,381) | 12.16 | (185.2,381.3) | 2.44 |
| (314,691) | (303,698) | 13.04 | (311.5,692.5) | 2.92 |
| (322,278) | (313,274) | 9.85 | (321.3,277.5) | 0.86 |
| (440,780) | (436,791) | 11.70 | (441.6,783.5) | 3.85 |
| (452,174) | (448,170) | 5.66 | (454.4,174.8) | 2.53 |
| (822,171) | (826,168) | 5 | (823.3,173.8) | 3.09 |
| (826,786) | (831,794) | 9.43 | (828.2,786.4) | 2.24 |
| (952,686) | (958,692) | 8.49 | (952.5,686.6) | 0.78 |
| (965,290) | (969,287) | 5 | (963.3,290.3) | 1.73 |
| (1074,387) | (1085,385) | 11.18 | (1076.8,386.2) | 2.91 |
| (1082,590) | (1090,593) | 8.54 | (1081.7,589.7) | 0.42 |
| (1220,488) | (1230,493) | 11.18 | (1218.7,491.9) | 4.11 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, P.-J.; Yang, S.-Y.; Wang, C.-S.; Muslikhin, M.; Wang, M.-S. Development of a Chinese Chess Robotic System for the Elderly Using Convolutional Neural Networks. Sustainability 2020, 12, 3980. https://doi.org/10.3390/su12103980
Chen P-J, Yang S-Y, Wang C-S, Muslikhin M, Wang M-S. Development of a Chinese Chess Robotic System for the Elderly Using Convolutional Neural Networks. Sustainability. 2020; 12(10):3980. https://doi.org/10.3390/su12103980
Chicago/Turabian StyleChen, Pei-Jarn, Szu-Yueh Yang, Chung-Sheng Wang, Muslikhin Muslikhin, and Ming-Shyan Wang. 2020. "Development of a Chinese Chess Robotic System for the Elderly Using Convolutional Neural Networks" Sustainability 12, no. 10: 3980. https://doi.org/10.3390/su12103980
APA StyleChen, P.-J., Yang, S.-Y., Wang, C.-S., Muslikhin, M., & Wang, M.-S. (2020). Development of a Chinese Chess Robotic System for the Elderly Using Convolutional Neural Networks. Sustainability, 12(10), 3980. https://doi.org/10.3390/su12103980