Multi-Objective Evaluation of Airborne Self-Separation Procedure in Flow Corridors Based on TOPSIS and Entropy


Abstract
1. Introduction
2. Airborne Self-Separation in Flow Corridors
2.1. Description of Airborne Self-Separation in Flow Corridors
2.2. Simulation Model of Self-Separation in Flow Corridors
- (1)
- Build up the simulation framework and initialize parameters, including construction of the flow corridor model, aircraft model, atmosphere model, and initialization of simulation parameters. Parameters for flow corridor model include the number of lanes, corridor length, width, and altitude. Important parameters used for aircraft modeling are aircraft type, reference mass, cruising Mach number, flight envelope, engine thrust and aerodynamics coefficients, etc. Atmosphere model will provide wind speeds, the standard pressure, temperature, density, and the speed of sound on the altitude of flow corridor. Simulation parameters include the number of simulated flights, replication times, time-step, etc.
- (2)
- Run the simulation for one time-step, randomly generate and initialize aircraft agents and add them into flights’ queues for flow corridor. Each flight agent should include the identity flag, aircraft type, position, initial velocity, acceleration, separation, entry time, flight queue number, position in the queue, the identity flag of its front aircraft, etc.
- (3)
- Update self-separations states for each aircraft in flight queues in the flow corridor according to the self-separation states transition rules [16]. The main information used for determining self-separation states includes the basic operational performance states (position, velocity, acceleration, etc.), separation and velocity difference with lead flight, available space in the adjacent lane, previous self-separation states for relative flights.
- (4)
- Run the simulation clock for one more time-step and update flight operational performance states based on the proposed aircraft dynamic model. The key operational states updated include along-track position, across-track position, heading, velocity, acceleration, etc.
- (5)
- Update flight queues for flow corridor. Check the along-track and across-track positions to decide whether a flight has flown out flow corridor. If a flight has flown out the flow corridor, remove the flight from the flight queue and record. Similarly, check the flight interval arrival information to decide whether some new flights will be added into the flight queues.
- (6)
- Decide whether it should stop the simulation. If all flights have flown out the flow corridor, stop the simulation and perform statistical analysis, or else jump to step (3) to do iteration.
3. Data and Methods
3.1. Data Collection and Preprocess
3.2. Traffic Operational Metrics Used for Evaluation
3.2.1. Impacts on Traffic Operation and Corridor Capacity
3.2.2. Impacts on Traffic Safety
3.2.3. Impacts on Environment
3.3. Multi-Objective Evaluation Compared with the Ideal Solution
- Step 1: Generate the evaluation matrix. Suppose that there are m scenarios to be evaluated (m equals ten for each case). Let aij indicate the performance evaluation value for the jth performance measure for the ith scenario (i = 1, 2, …, m, j = 1, 2, …, n); then, the evaluation matrix is illustrated as A = [aij]m × n.
- Step 2: Normalize the performance measures. As the performance measures are in different units, i.e., the throughput is measured in aircraft/h, the potential conflict rate is measured in probability, the average delay is measured in minutes, and the average fuel consumption is measured in ton, these values are required to be normalized by transforming them into a dimensionless value. The standardization equation is written as:orwhere rij represents the jth performance value for the ith scenario after normalization, 0 ≤ rij ≤ 1. The evaluation matrix after normalization is written as R = [rij]m × n.
- Step 3: Calculate the entropy of different indexes. Let Ej represent the entropy for the jth performance measure. The following equation can be used to calculate Ej:where 0 ≤ Ej ≤ 1; k is an adjustment factor, which can be estimated as 1/ln m.
- Step 4: Determine the entropy weight ωj for the jth performance measure.
- Step 5: Calculate the geometric distance between each alternative and the ideal alternative. Let R+ = {r1+, r2+, …, rn+} represent the decision matrix for the ideal solution and R− = {r1−, r2−, …, rn−} represent the decision matrix for the negative ideal solution, where rj+ = max{rij|I = 1, 2, …, m }, rj− = min{rij|I = 1, 2, …, m }, j = 1, 2, …, n. We can calculate the distance from each performance measure to Di+ and Di− as follows:
- Step 6: Estimate the relative closeness Gi for the ith treatment to the ideal solution.
4. Numerical Test
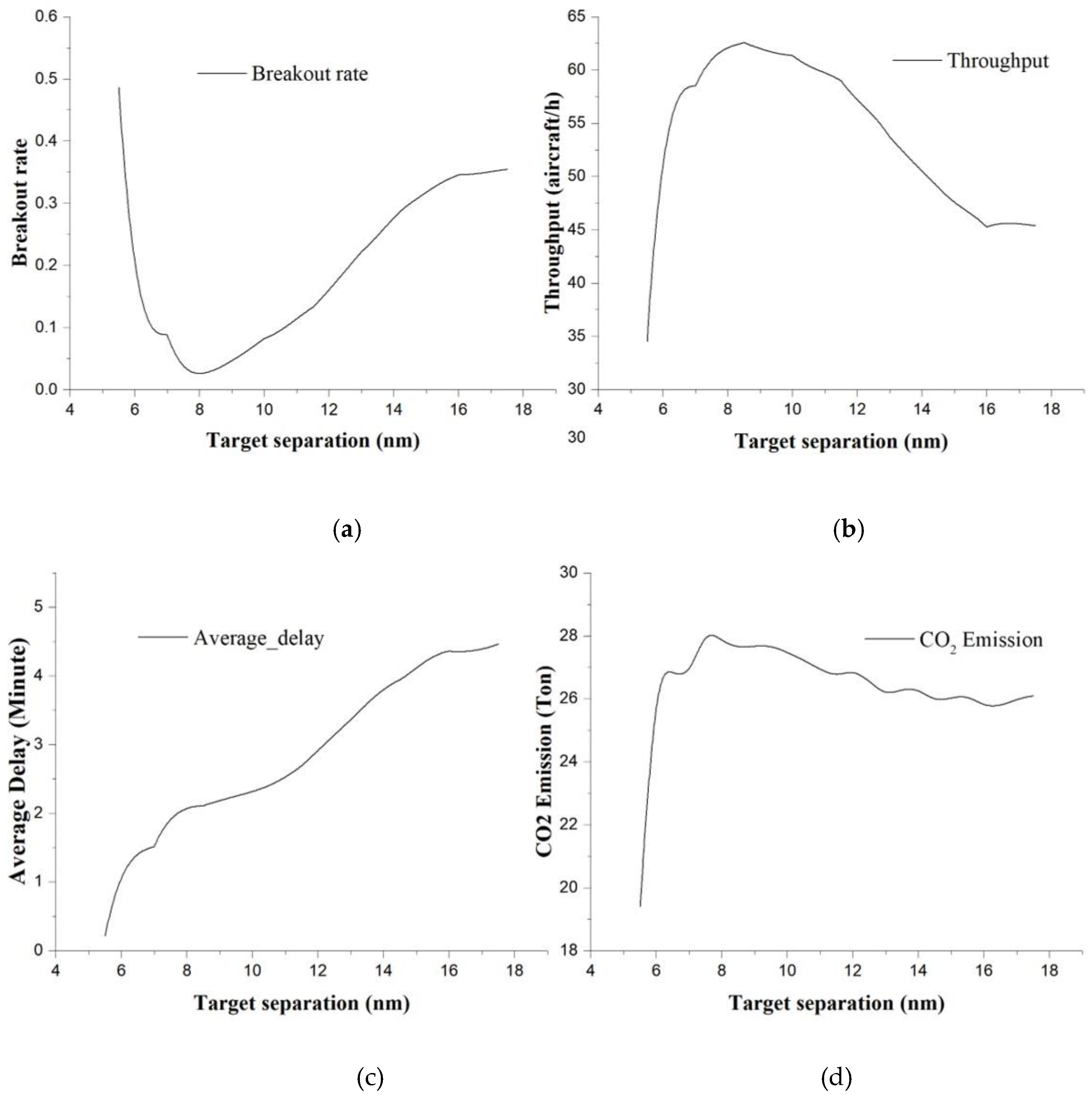
4.1. Results of Self-Separation Simulation in Flow Corridors
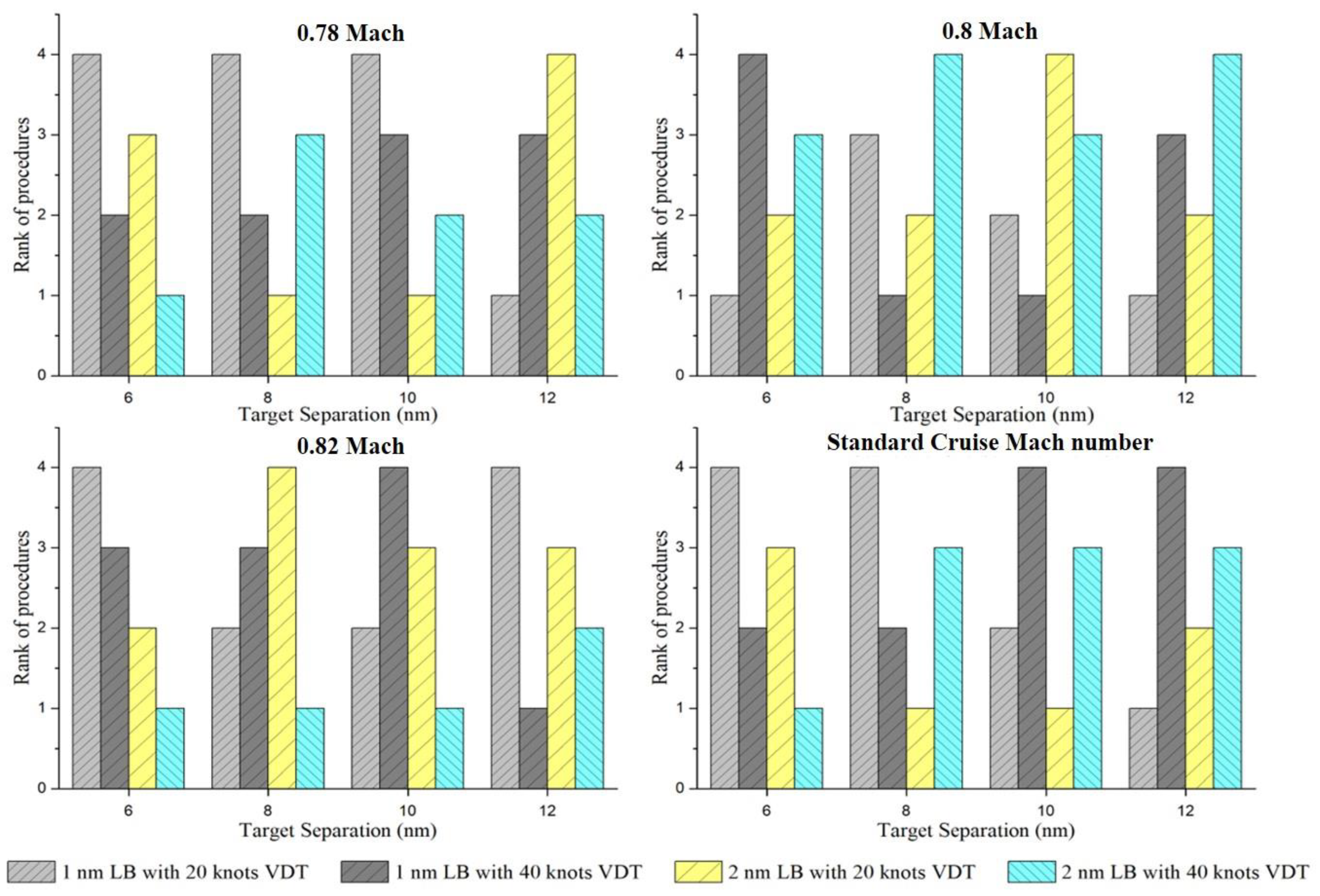
4.2. Multi-Objective Evaluation Based on TOPSIS and Entropy
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Federal Aviation Administration. Concept of Operations for the Next Generation Air Transportation System; Technical Report; Federal Aviation Administration: Washington, DC, USA, 2010. [Google Scholar]
- Federal Aviation Administration. NextGen Implementation Plan; FAA: Washington, DC, USA, 2017. [Google Scholar]
- Alipio, J.; Castro, P.; Kaing, H.; Shahid, N.; Sherzai, O.; Donohue, G.L.; Grundmann, K. Dynamic airspace super sectors (DASS) as high-density highways in the sky for a new US air traffic management system. In Proceedings of the IEEE Systems and Information Engineering Design Symposium, Charlottesville, VA, USA, 24–25 April 2003; pp. 57–66. [Google Scholar]
- Yousefi, A.; Donohue, G.L.; Sherry, L. High-volume tube-shape sectors (HTS): A network of high capacity ribbons connecting congested city pairs. In Proceedings of the 23rd Digital Avionics Systems Conference, Salt Lake City, UT, USA, 28 October 2004; pp. 3.C.1-1–3.C.1-7. [Google Scholar]
- Hering, H. Air Traffic Freeway System for Europe; EEC Report No. 20/05; Eurocontrol Experimental Centre: Brussels, Belgium, 2005. [Google Scholar]
- Wing, D.J.; Smith, J.C.; Ballin, M.G. Analysis of a Dynamic Multi-Track Airway Concept for Air Traffic Management; NASA/TP-2008-215323; Langley Research Center: Hampton, VA, USA, 2008. [Google Scholar]
- Yousefi, A.; Zadeh, A.N.; Tafazzoli, A. Dynamic allocation and benefit assessment of NextGen flow corridors. Transp. Res. Part C 2013, 33, 297–310. [Google Scholar] [CrossRef]
- Sridhar, B.; Grabbe, S.; Sheth, K.; Bilimoria, K.D. Initial study of tube networks for flexible airspace utilization. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Keystone, CO, USA, 21–24 August 2006; p. 6768. [Google Scholar]
- Kotecha, P.; Hwang, I. Optimization based tube network design for the next generation air transportation system. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Chicago, IL, USA, 10–13 August 2009; p. 5860. [Google Scholar]
- Sridhar, B.; Islam, T.; Gupta, G. Design and Simulation Methodology to Improve the Performance of Airspace Tube Networks. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Toronto, ON, Canada, 2–5 August 2010; p. 8288. [Google Scholar]
- Mundra, A.D.; Simons, E.M. Self-separation corridors. In Proceedings of the 2007 IEEE/AIAA 26th Digital Avionics Systems Conference, Dallas, TX, USA, 21–25 October 2007; pp. 3.C.3-1–3.C.3-11. [Google Scholar]
- Doble, N.; Hoffman, R.; Lee, P.; Mercer, J.; Gore, B.; Smith, N.; Lee, K. Current airspace configuration practices and their implications for future airspace concepts. In Proceedings of the 26th Congress of International Council of the Aeronautical Sciences (ICAS), Anchorage, AK, USA, 14–19 September 2008. [Google Scholar]
- Sheth, K.S.; Islam, T.S.; Kopardekar, P.H. Analysis of airspace tube structures. In Proceedings of the 2008 IEEE/AIAA 27th Digital Avionics Systems Conference, St. Paul, MN, USA, 26–30 October 2008; pp. 3.C.2-1–3.C.2-10. [Google Scholar]
- Belle, A.; Yousefi, A. Analysis of performance of Q routes for establishing future design criteria. In Proceedings of the Integrated Communications Navigation and Surveillance (ICNS) Conference, Herndon, VA, USA, 11–13 May 2010. [Google Scholar]
- Yousefi, A.; Lard, J.; Timmerman, J. Nextgen flow corridors initial design, procedures and display functionalities. In Proceedings of the 2010 IEEE/AIAA 29th Digital Avionics Systems Conference (DASC), Salt Lake City, UT, USA, 3–7 October 2010; pp. 4.D.1-1–4.D.1-19. [Google Scholar]
- Ye, B.; Hu, M.; Shortle, J. Collision risk-capacity tradeoff analysis of an en-route corridor model. Chin. J. Aeronaut. 2014, 27, 124–135. [Google Scholar] [CrossRef]
- Ye, B.; Shortle, J.; Ochieng, W.; Tian, Y. Sensitivity analysis of potential capacity and safety of flow corridor to self-separation parameters. Aeronaut. J. 2018, 123, 56–78. [Google Scholar] [CrossRef]
- Xue, M.; Kopardekar, P. High-capacity tube network design using the Hough transform. J. Guid. Control Dyn. 2009, 32, 788–795. [Google Scholar] [CrossRef]
- Hoffman, R.; Prete, J. Principles of airspace tube design for dynamic airspace configuration. In Proceedings of the 8th AIAA-ATIO Conference, AIAA-2008-8939, Anchorage, AK, USA, 14–19 September 2008. [Google Scholar]
- Xue, M.; Zelinski, S. Complexity Analysis of Traffic in Corridors-in-the-Sky. In Proceedings of the 10th Aviation Technology, Integration, and Operations Conference, AIAA-2010-9112, Fort Worth, TX, USA, 13–15 September 2010. [Google Scholar]
- Shortle, J.; Sherry, L.; Yousefi, A.; Xie, R. Safety and sensitivity analysis of the advanced airspace concept for NextGen. In Proceedings of the Integrated Communication, Navigation and Surveillance Conference, Herndon, VA, USA, 24–26 April 2012. [Google Scholar]
- Shortle, J.; Zhang, Y. Safety comparison of centralized and distributed aircraft separation assurance concepts. IEEE Trans. Reliab. 2014, 63, 259–269. [Google Scholar] [CrossRef]
- Zhang, Y.; Shortle, J.; Sherry, L. Methodology for collision risk assessment of an airspace flow corridor concept. Reliab. Eng. Syst. Saf. 2015, 142, 444–455. [Google Scholar] [CrossRef]
- Blom, A.P.H.; Bakker, G.J. Safety Evaluation of Advanced Self-Separation under Very High En Route Traffic Demand. J. Aerosp. Inf. Syst. 2015, 12, 413–427. [Google Scholar] [CrossRef]
- Glover, W.; Lygeros, J. A Multi-Aircraft Model for Conflict Detection and Resolution Algorithm Evaluation; Deliverable D1.3; Contract No.: IST-2001-32460 of European Commission; European Commission: Brussels, Belgium, 2004. [Google Scholar]
- European Organization for the Safety of Air Navigation, Eurocontrol Experimental Centre. User Manual for the Base of Aircraft Data (BADA); Revision 3.8; Report No.: EEC Note No. 11/06; European Organization for the Safety of Air Navigation, Eurocontrol Experimental Centre: Brussels, Belgium, 2011. [Google Scholar]
- Ashok, A.; Balakrishnan, H.; Barrett, S.R.H. Reducing the air quality and CO2 climate impacts of taxi and takeoff operations at airports. Transp. Res. Part D Transp. Environ. 2017, 54, 287–303. [Google Scholar] [CrossRef]
- Hwang, C.L.; Yoon, K. Multiple Attribute Decision Making: Methods and Applications; Springer: New York, NY, USA, 1981. [Google Scholar]
- Yoon, K.P. A reconciliation among discrete compromise solutions. J. Oper. Res. Soc. 1987, 38, 277–286. [Google Scholar] [CrossRef]
- Hwang, C.L.; Lai, Y.J.; Liu, T.Y. A new approach for multiple objective decision making. Comput. Oper. Res. 1993, 20, 889–899. [Google Scholar] [CrossRef]
- Huang, I.B.; Keisler, J.; Linkov, I. Multi-criteria decision analysis in environmental science: Ten years of applications and trends. Sci. Total Environ. 2011, 409, 3578–3594. [Google Scholar] [CrossRef]
- Yang, Z.; Liu, P.; Xun, X.; Xu, C.C. Multi-objective Evaluation of Midblock Crosswalks on Urban Streets Based on TOPSIS and Entropy Methods. Transp. Res. Rec. 2016, 2586, 59–71. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Aircraft Type | Flight Number | Ratio | Flying Time (Min) | |
|---|---|---|---|---|
| Mean Value | Standard Deviation | |||
| A320 | 3626 | 19% | 131.84 | 8.86 |
| A332 | 1055 | 5% | 128.35 | 7.88 |
| A333 | 3156 | 16% | 129.08 | 8.52 |
| A388 | 404 | 2% | 122.70 | 7.30 |
| B737 | 8257 | 43% | 131.08 | 8.61 |
| B772 | 465 | 2% | 126.09 | 7.89 |
| B77W | 1096 | 6% | 128.58 | 8.08 |
| B787 | 1338 | 7% | 122.51 | 7.87 |
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| Simulation times | 20 times | Interval arrival | Exp (0.0122) nmi |
| Simulation time-step | 6 s | Minimum separation | 5 nmi |
| Aircraft number | 20,000 | Separation buffer | 2 nmi |
| Time lag | 6 s | Lane-switch buffer | 1 nmi |
| Corridor length | 940 nmi | Velocity difference threshold | 40 nmi |
| Fleet mix | Realistic proportion | Distance threshold | 10 nmi |
| Self-Separation Variables and Metrics | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| Target velocity (Mach) | 0.78 | 0.78 | Mcr | Mcr |
| Target separation (nmi) | 6 nmi (1) | 10 nmi (5) | 6 nmi | 10 nmi |
| Throughput (aircraft/h) | 94.01 | 80.96 | 92.56 | 81.46 |
| Potential conflicts rate | 0.0036 | 0.2532 | 0.0601 | 0.2681 |
| Average delay (min) | 1.54 | 1.78 | 1.10 | 1.48 |
| Average fuel consumption (Ton) | 33.06 | 30.59 | 33.21 | 31.40 |
| Rank | 1 | 3 | 4 | 2 |
| Relative closeness | 0.6082 | 0.3710 | 0.5935 | 0.3156 |
| Factors | Scenarios Being Considered | |||
|---|---|---|---|---|
| Lane-switch buffer (nmi) | 1 nmi | 2 nmi | ||
| Velocity difference threshold (knots) | 20 knots | 40 knots | ||
| Target velocity (Mach) | MCR | 0.78 | 0.8 | 0.82 |
| Target separation (nmi) | 6 | 8 | 10 | 12 |
| Traffic density (aircraft/nmi/lane) | 1X | 4X | ||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ye, B.; Yang, Z.; Wan, L.; Dong, Y. Multi-Objective Evaluation of Airborne Self-Separation Procedure in Flow Corridors Based on TOPSIS and Entropy. Sustainability 2020, 12, 322. https://doi.org/10.3390/su12010322
Ye B, Yang Z, Wan L, Dong Y. Multi-Objective Evaluation of Airborne Self-Separation Procedure in Flow Corridors Based on TOPSIS and Entropy. Sustainability. 2020; 12(1):322. https://doi.org/10.3390/su12010322
Chicago/Turabian StyleYe, Bojia, Zhao Yang, Lili Wan, and Yunlong Dong. 2020. "Multi-Objective Evaluation of Airborne Self-Separation Procedure in Flow Corridors Based on TOPSIS and Entropy" Sustainability 12, no. 1: 322. https://doi.org/10.3390/su12010322
APA StyleYe, B., Yang, Z., Wan, L., & Dong, Y. (2020). Multi-Objective Evaluation of Airborne Self-Separation Procedure in Flow Corridors Based on TOPSIS and Entropy. Sustainability, 12(1), 322. https://doi.org/10.3390/su12010322