Direct Power Control of Matrix Converter-Fed DFIG with Fixed Switching Frequency


Abstract
:1. Introduction
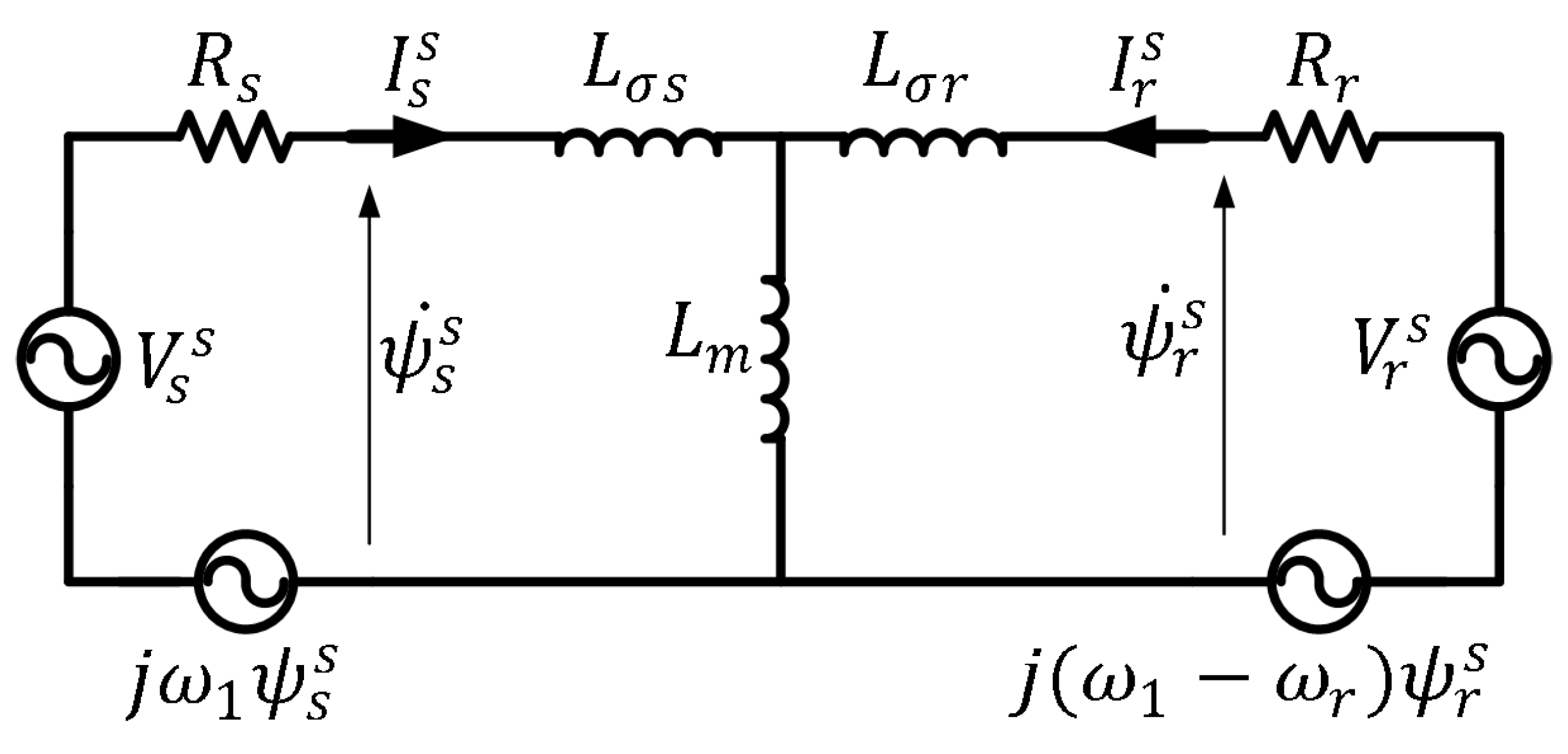
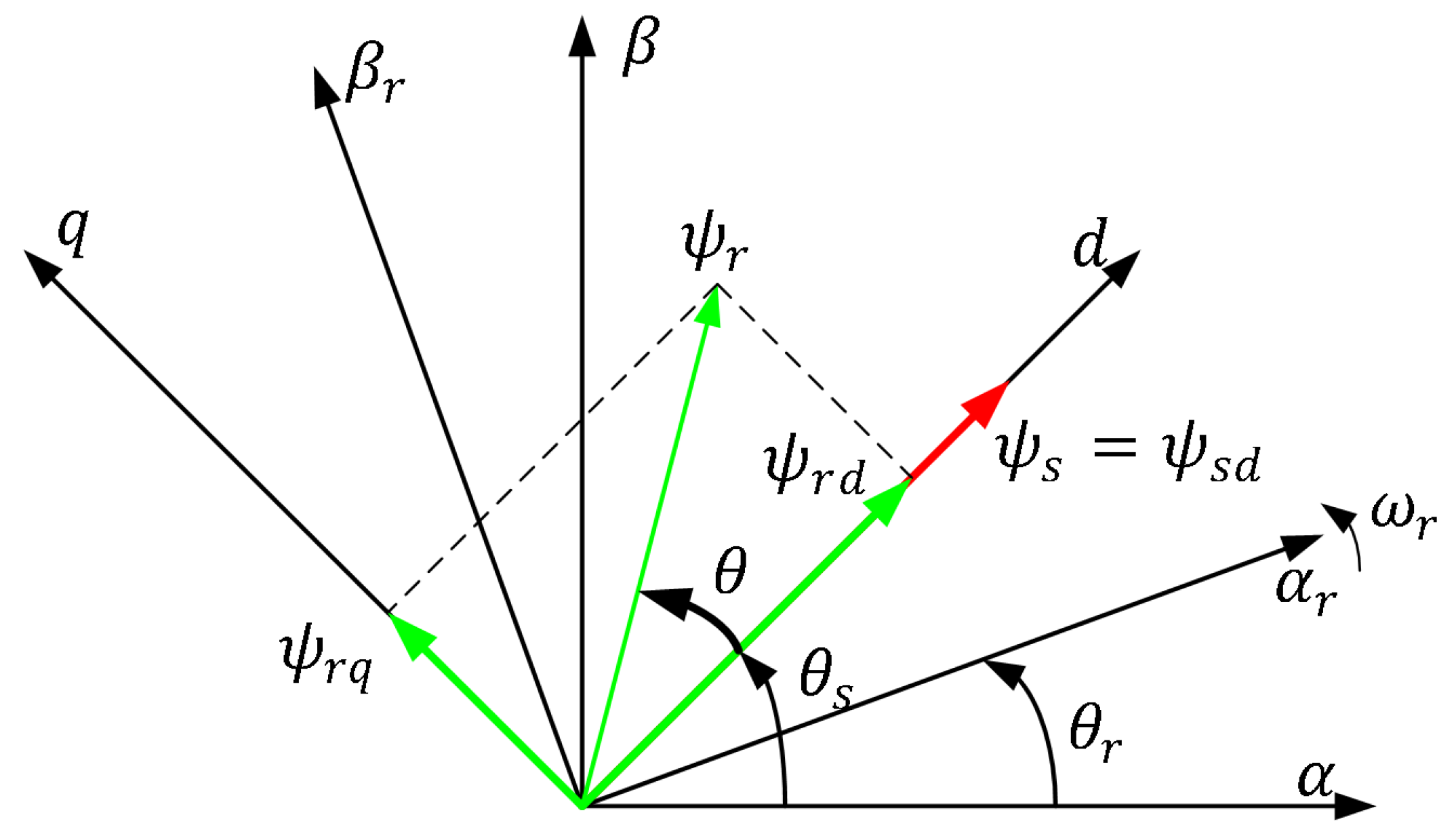
2. Direct Power Control Theory
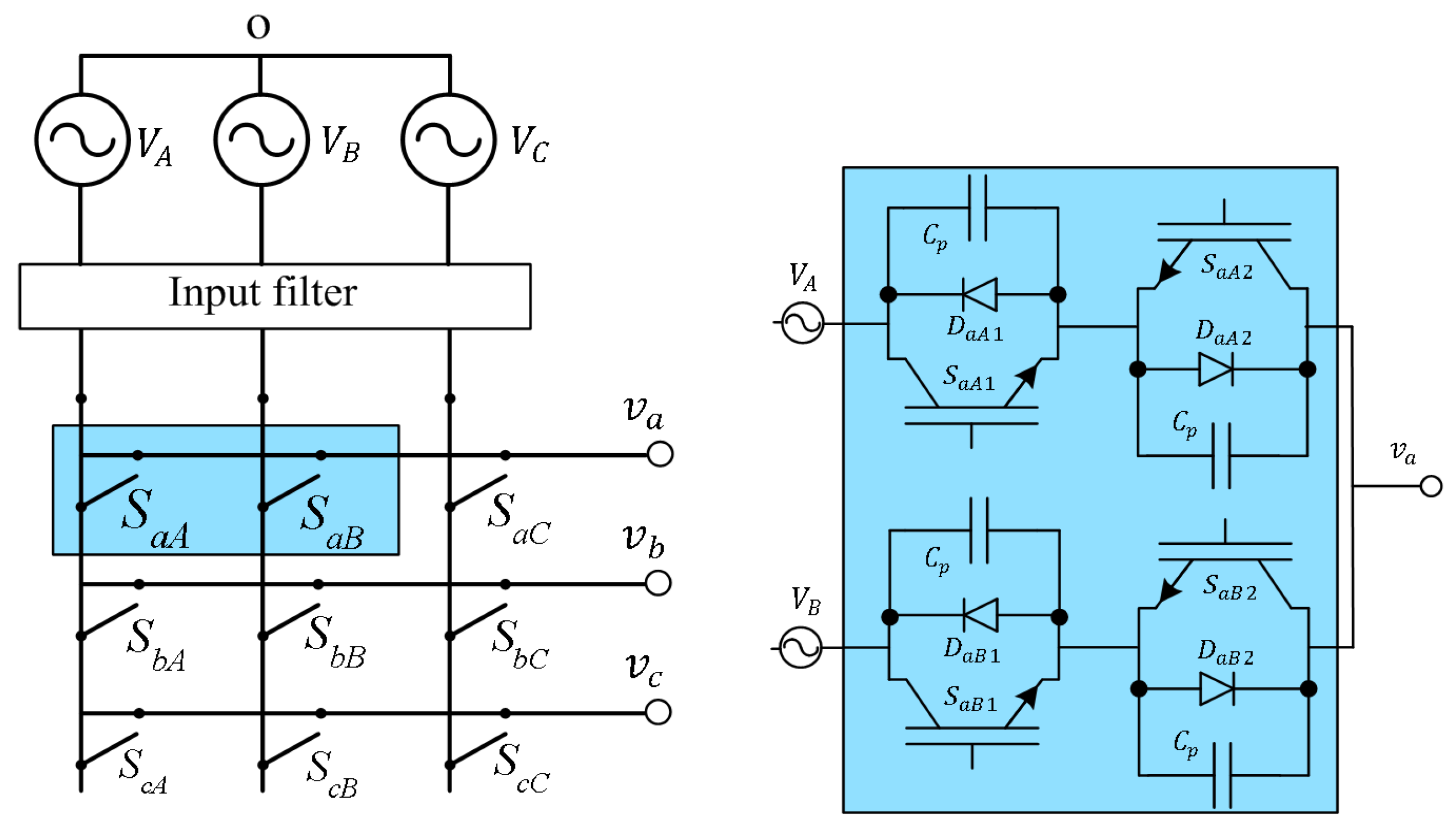
3. Matrix Converter
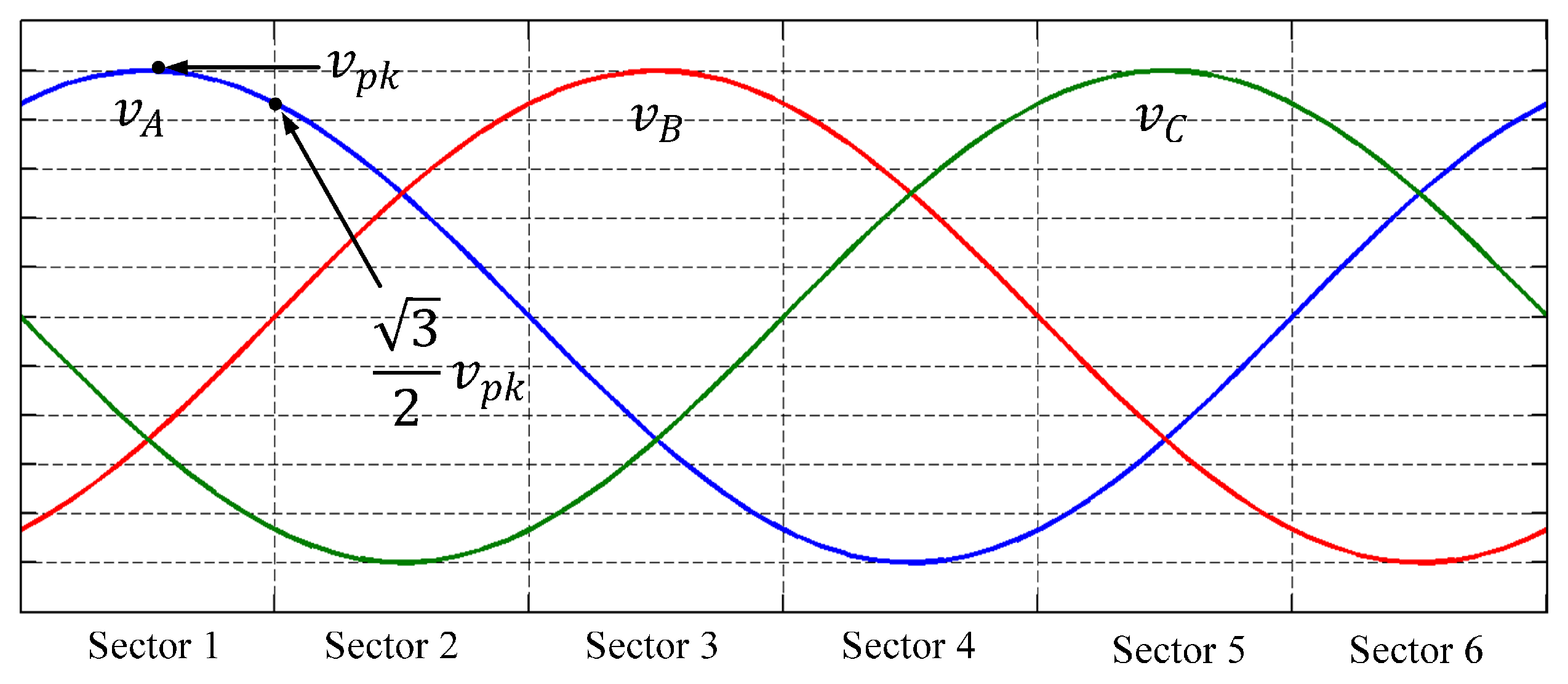
3.1. Indirect Space Vector Modulation
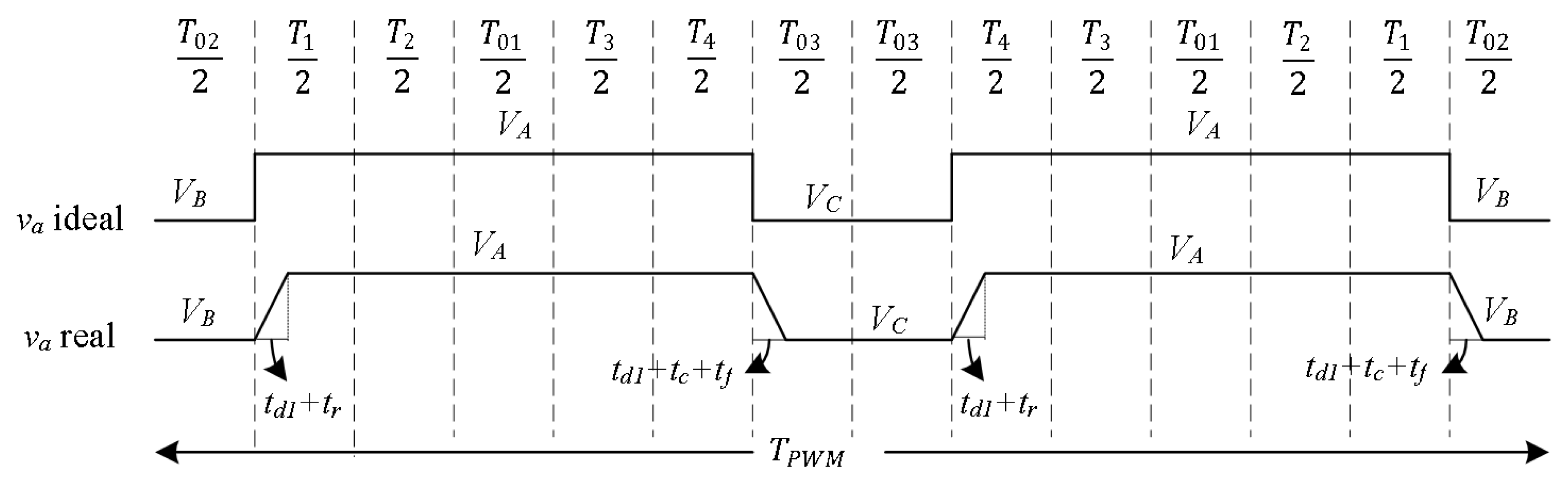
3.2. Four Step Current-Based Commutation (FS-CBC) and Edge Uncertainty (EU) Effect
3.3. On-State Voltage Drop
3.4. Overall Voltage Errors
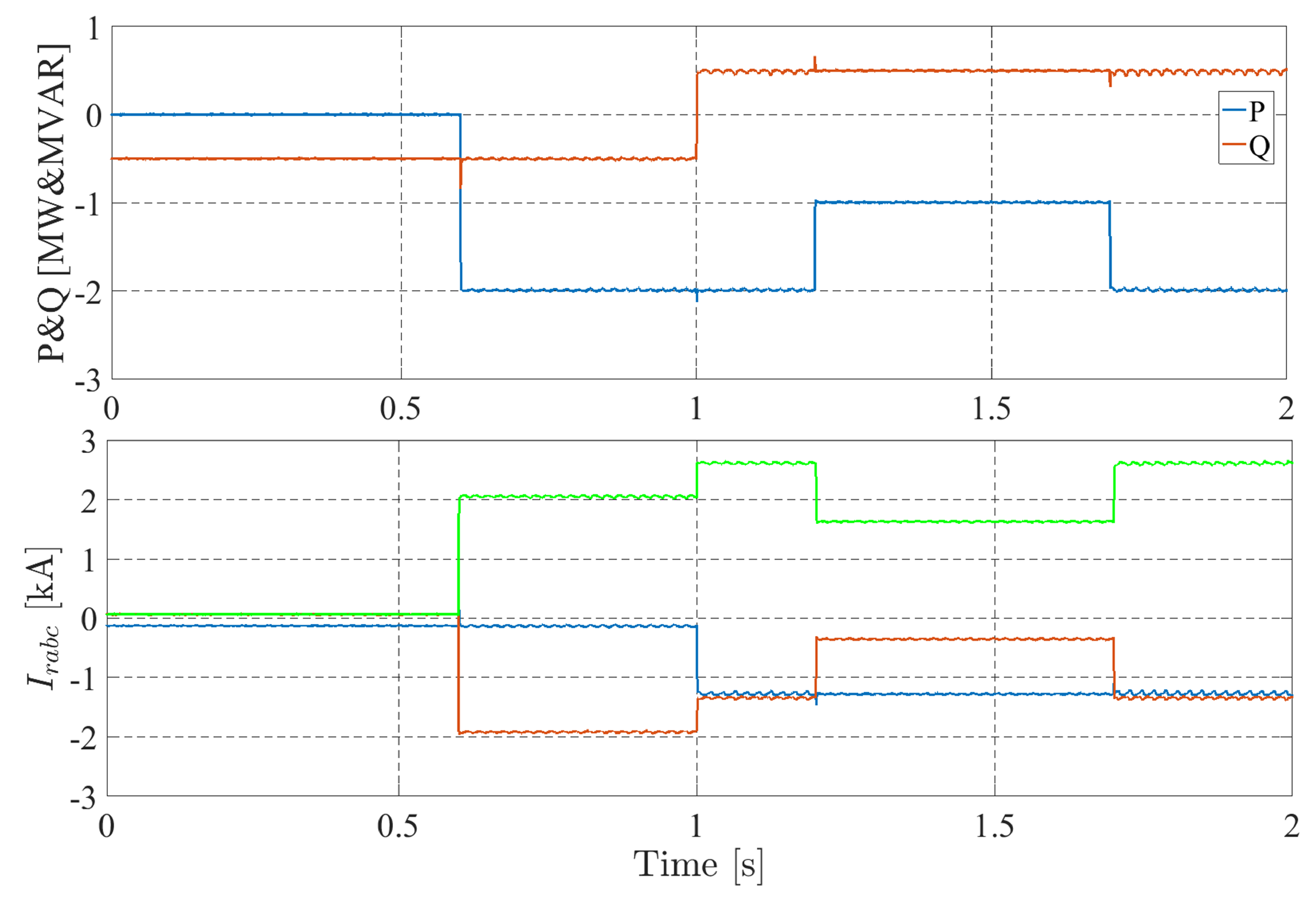
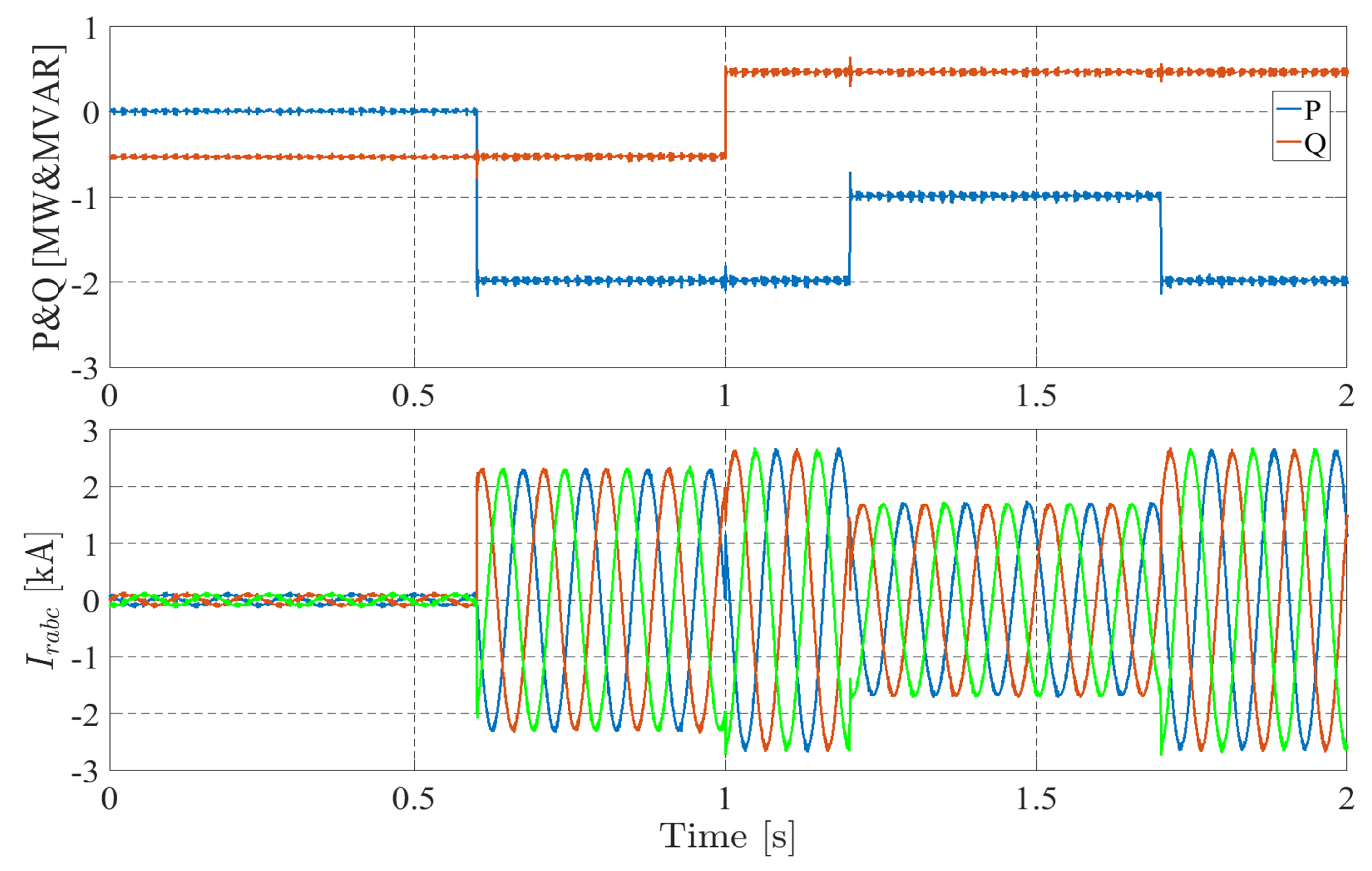
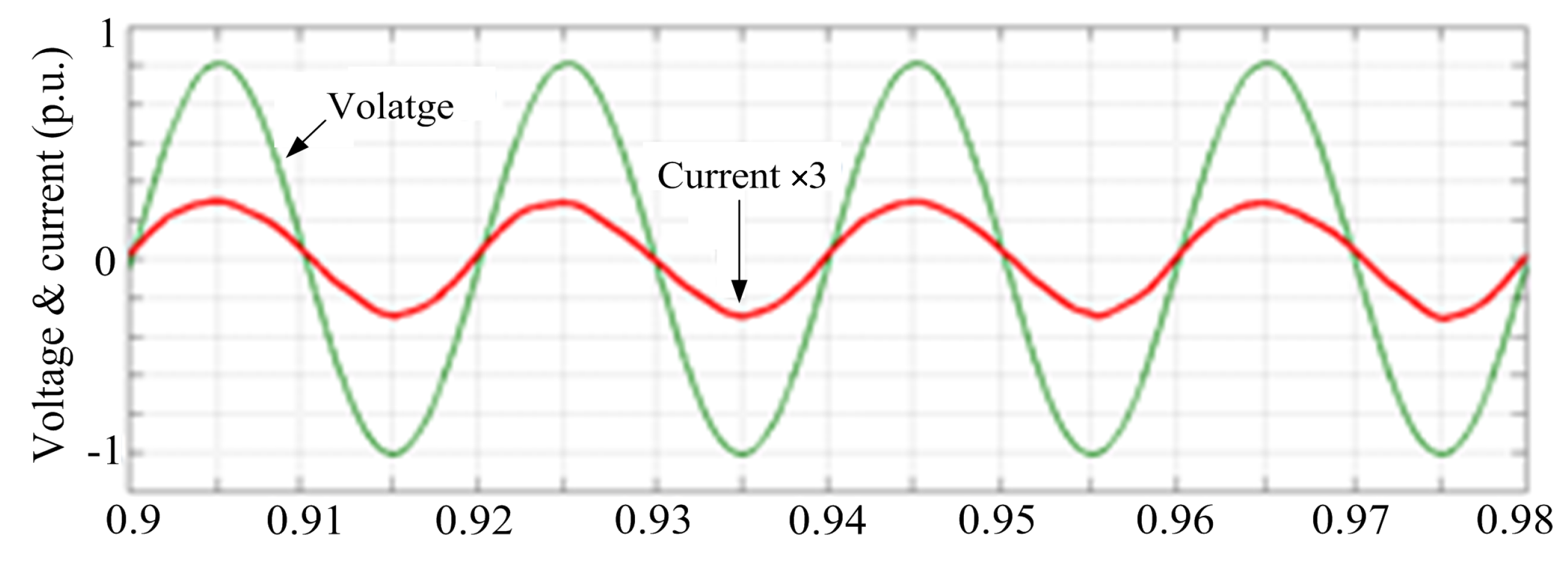
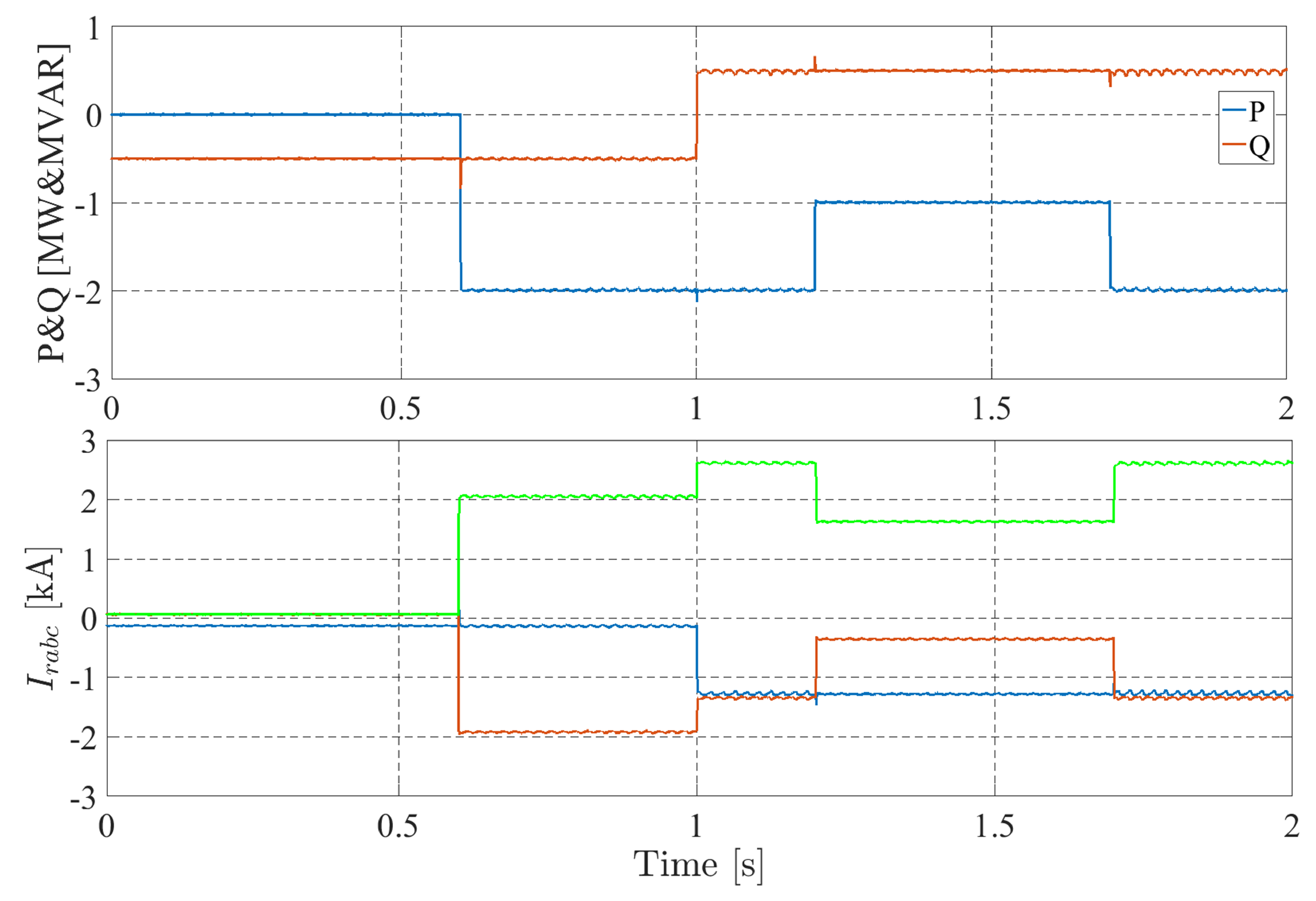
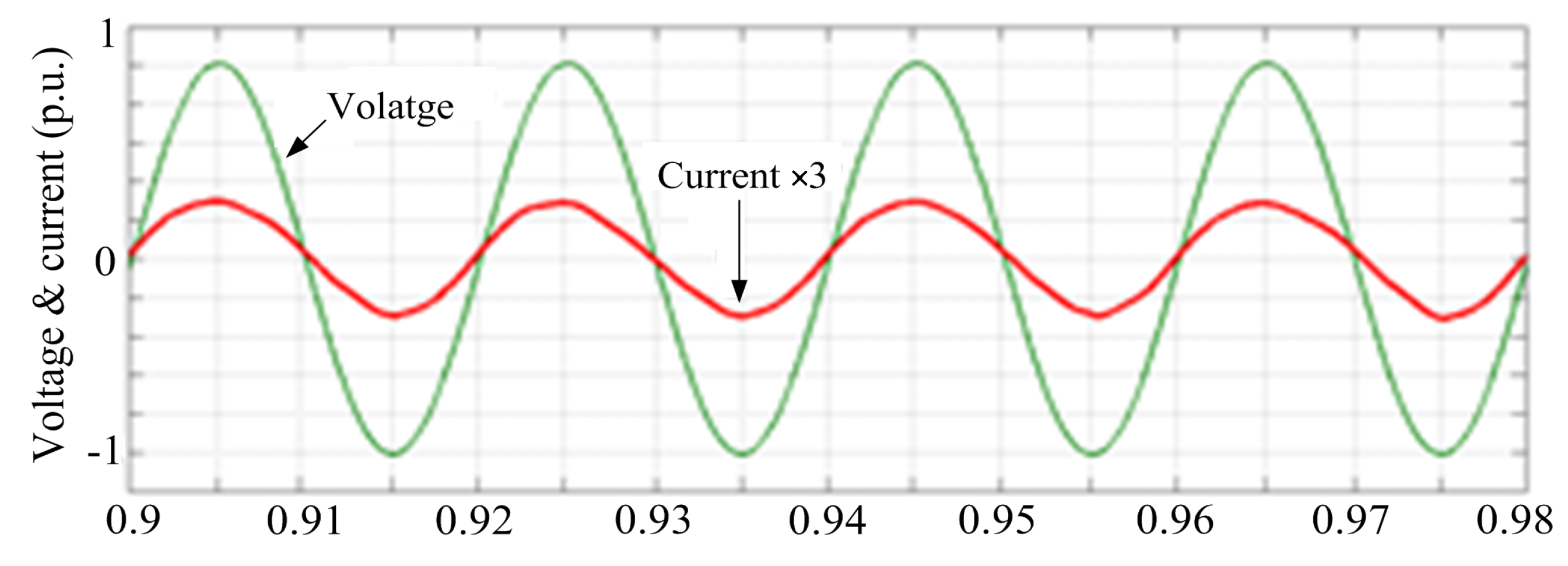
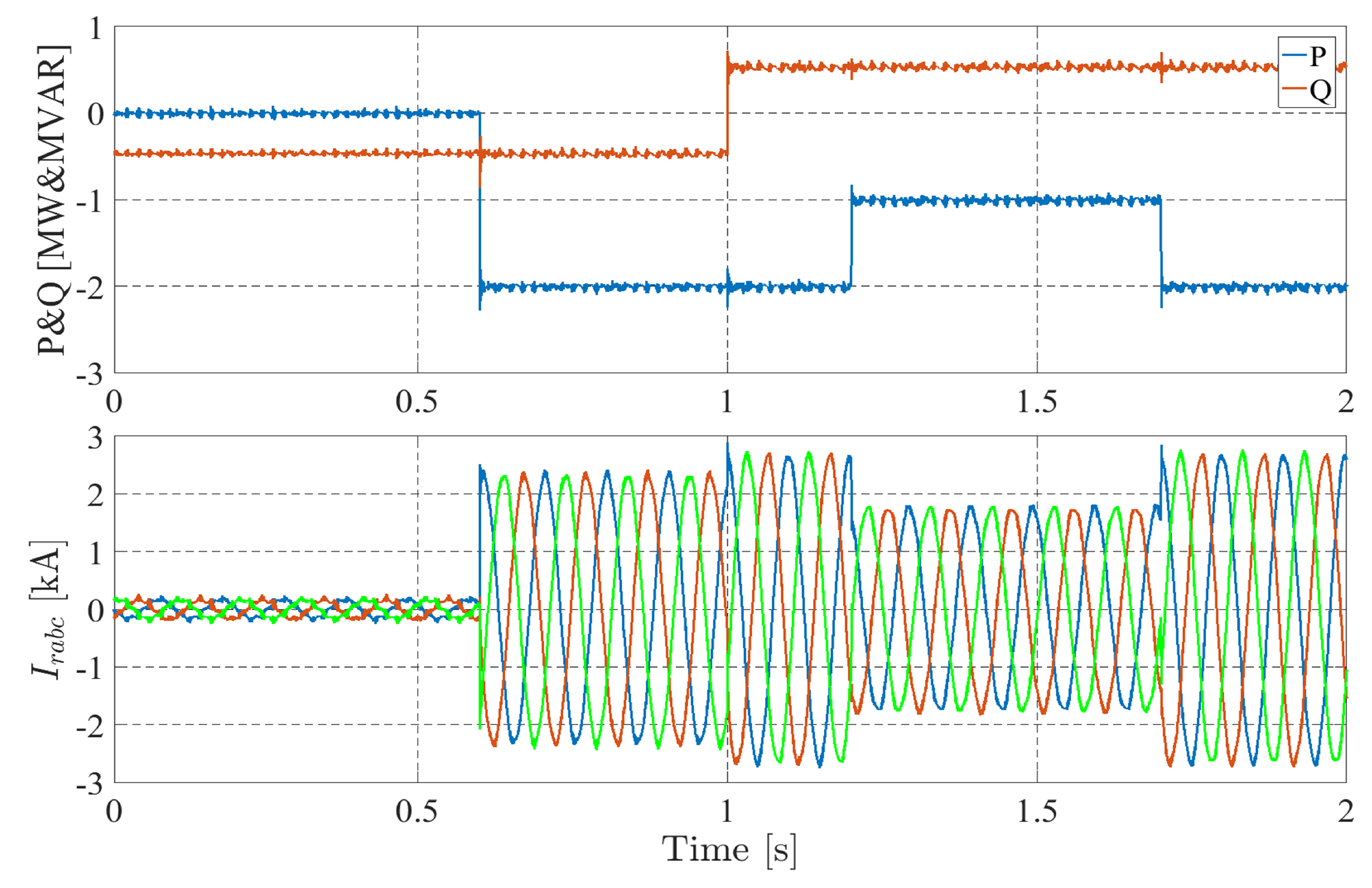
4. Simulation Results
Comparison with Variable Switching Frequency
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Rodrigues, E.M.G.; Godina, R.; Marzband, M.; Pouresmaeil, E. Simulation and Comparison of Mathematical Models of PV Cells with Growing Levels of Complexity. Energies 2018, 11, 2902. [Google Scholar] [CrossRef]
- Barton, J.P.; Infield, D.G. Energy storage and its use with intermittent renewable energy. IEEE Trans. Energy Convers. 2004, 19, 441–448. [Google Scholar] [CrossRef]
- Lalor, G.; Mullane, A.; O’Malley, M. Frequency control and wind turbine technologies. IEEE Trans. Power Syst. 2005, 20, 1905–1913. [Google Scholar] [CrossRef]
- Tavakkoli, M.; Adabi, J.; Zabihi, S.; Godina, R.; Pouresmaeil, E. Reserve Allocation of Photovoltaic Systems to Improve Frequency Stability in Hybrid Power Systems. Energies 2018, 11, 2583. [Google Scholar]
- Muller, S.; Deicke, M.; De Doncker, R.W. Doubly fed induction generator systems for wind turbines. IEEE Ind. Appl. Mag. 2002, 143, 26–33. [Google Scholar] [CrossRef]
- Akagi, H.; Sato, H. Control and performance of a doubly-fed induction machine intended for a flywheel energy storage system. IEEE Trans. Power Electron. 2002, 17, 109–116. [Google Scholar] [CrossRef]
- Xu, L.; Cartwright, P. Direct active and reactive power control of DFIG for wind energy generation. IEEE Trans. Energy Convers. 2006, 21, 750–758. [Google Scholar] [CrossRef]
- Takahashi, I.; Noguchi, T. A New Quick-Response and High-Efficiency Control Strategy of an Induction Motor. IEEE Trans. Ind. Appl. 1986, IA-22, 820–827. [Google Scholar] [CrossRef]
- Zhi, D.; Xu, L. Direct Power Control of DFIG With Constant Switching Frequency and Improved Transient Performance. IEEE Trans. Energy Convers. 2007, 22, 110–118. [Google Scholar] [CrossRef]
- Zhi, D.; Xu, L.; Williams, B.W. Model-Based Predictive Direct Power Control of Doubly Fed Induction Generators. IEEE Trans. Power Electron. 2010, 25, 341–351. [Google Scholar]
- Sun, D.; Wang, X.; Nian, H.; Zhu, Z.Q. A Sliding-Mode Direct Power Control Strategy for DFIG under Both Balanced and Unbalanced Grid Conditions Using Extended Active Power. IEEE Trans. Power Electron. 2018, 33, 1313–1322. [Google Scholar] [CrossRef]
- Abad, G.; Rodriguez, M.A.; Poza, J. Two-Level VSC Based Predictive Direct Torque Control of the Doubly Fed Induction Machine With Reduced Torque and Flux Ripples at Low Constant Switching Frequency. IEEE Trans. Power Electron. 2008, 23, 1050–1061. [Google Scholar] [CrossRef]
- Abad, G.; Rodríguez, M.A.; Iwanski, G.; Poza, J. Direct Power Control of Doubly-Fed-Induction- Generator-Based Wind Turbines Under Unbalanced Grid Voltage. IEEE Trans. Power Electron. 2010, 25, 442–452. [Google Scholar] [CrossRef]
- Wheeler, P.W.; Rodriguez, J.; Clare, J.C.; Empringham, L.; Weinstein, A. Matrix converters: A technology review. IEEE Trans. Ind. Electron. 2002, 49, 276–288. [Google Scholar] [CrossRef]
- Huber, L.; Borojevic, D. Space vector modulated three-phase to three-phase matrix converter with input power factor correction. IEEE Trans. Ind. Appl. 1995, 31, 1234–1246. [Google Scholar] [CrossRef]
- Yousefi-Talouki, A.; Pellegrino, G.; Mengoni, M.; Zarri, L. Self-commissioning algorithm for matrix converter, nonlinearity compensation. In Proceedings of the 2015 IEEE Energy Conversion Congress and Exposition (ECCE), Montreal, QC, Canada, 20–24 Septemeber 2015; pp. 4077–4083. [Google Scholar]
- Stella, F.; Yousefi-Talouki, A.; Odhano, S.; Pellegrino, G.; Zanchetta, P. An Accurate Self-Commissioning Technique for Matrix Converters Applied to Sensorless Control of Synchronous Reluctance Motor Drives. IEEE J. Emerg. Sel. Top. Power Electron. 2018. [Google Scholar] [CrossRef]
- Mondal, S.; Kastha, D. Maximum Active and Reactive Power Capability of a Matrix Converter-Fed DFIG-Based Wind Energy Conversion System. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 1322–1333. [Google Scholar] [CrossRef]
- Rajendran, S.; Govindarajan, U.; Sankar, D.S.P. Active and reactive power regulation in grid connected wind energy systems with permanent magnet synchronous generator and matrix converter. IET. Power Electron. 2014, 7, 591–603. [Google Scholar] [CrossRef]
- Alizadeh, M.; Kojuri, S.S. Modelling, control, and stability analysis of quasi-Z-source matrix converter as the grid interface of a PMSG-WECS. IET Gener. Transm. Dis. 2017, 11, 3576–3585. [Google Scholar] [CrossRef]
- Cardenas, R.; Pena, R.; Tobar, G.; Clare, J.; Wheeler, P.; Asher, G. Stability Analysis of a Wind Energy Conversion System Based on a Doubly Fed Induction Generator Fed by a Matrix Converter. IEEE Trans. Ind. Electron. 2009, 56, 4194–4206. [Google Scholar] [CrossRef]
- Yousefi-Talouki, A.; Pouresmaeil, E.; Nørregaard Jørgensen, B. Active and reactive power ripple minimization in direct power control of matrix converter-fed DFIG. Int. J. Electr. Power Energy Syst. 2014, 63, 600–608. [Google Scholar] [CrossRef]
- Yousefi-Talouki, A.; Negnevitsky, M. Direct power control of matrix converter-fed doubly fed induction generator. In Proceedings of the 2013 Australasian Universities Power Engineering Conference (AUPEC), Hobart, Australia, 29 September–3 October 2013; pp. 1–6. [Google Scholar]
- Mondal, S.; Kastha, D. Improved Direct Torque and Reactive Power Control of a Matrix-Converter-Fed Grid-Connected Doubly Fed Induction Generator. IEEE Trans. Ind. Electron. 2015, 62, 7590–7598. [Google Scholar] [CrossRef]
- Akagi, H.; Kanazawa, Y.; Nabae, A. Generalized theory of the instantaneous reactive power in three-phase circuits. In Proceedings of the International Power Electronics Conference, Tokyo, Janpan, 27–31 March 1983; pp. 1375–1386. [Google Scholar]
- Wu, C.; Nian, H.; Zhou, Q.; Cheng, P.; Pang, B.; Sun, D. Harmonic Impedance Modeling of DFIG Considering Dead Time Effect of Rotor Side Converter. In Proceedings of the 2018 IEEE Energy Conversion Congress and Exposition (ECCE), Portland, OR, USA, 23–27 September 2018; pp. 950–955. [Google Scholar]
- Herran, M.A.; Fischer, J.R.; Gonzalez, S.A.; Judewicz, M.G.; Carrica, D.O. Adaptive Dead-Time Compensation for Grid-Connected PWM Inverters of Single-Stage PV Systems. IEEE Trans. Power Electron. 2013, 28, 2816–2825. [Google Scholar] [CrossRef]
- Lee, D.-H.; Ahn, J.-W. A Simple and Direct Dead-Time Effect Compensation Scheme in PWM-VSI. IEEE Trans. Ind. Appl. 2014, 50, 3017–3025. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input Sectors | |
|---|---|
| 1 | |
| 2 | |
| 3 | |
| 4 | |
| 5 | |
| 6 |
| DFIG Parameters | |
| Rated power | 2 [MW] |
| Stator voltage | 690 [V] |
| Stator/rotor turns ratio | 0.3 |
| 0.0108 p.u. | |
| 0.0121 p.u. (referred to the stator) | |
| 3.362 p.u. | |
| 0.102 p.u. | |
| 0.11 p.u. (referred to the stator) | |
| Lumped inertia constant | 0.2 s |
| Number of pole pairs | 2 |
| Matrix Converter Specifications | |
| 0.6 [s]/0.46 [s]/0.6 [s] | |
| Input filter inductance | 1 [mH] |
| Input filter capacitance | 12 [F] |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yousefi-Talouki, A.; Zalzar, S.; Pouresmaeil, E. Direct Power Control of Matrix Converter-Fed DFIG with Fixed Switching Frequency. Sustainability 2019, 11, 2604. https://doi.org/10.3390/su11092604
Yousefi-Talouki A, Zalzar S, Pouresmaeil E. Direct Power Control of Matrix Converter-Fed DFIG with Fixed Switching Frequency. Sustainability. 2019; 11(9):2604. https://doi.org/10.3390/su11092604
Chicago/Turabian StyleYousefi-Talouki, Arzhang, Shaghayegh Zalzar, and Edris Pouresmaeil. 2019. "Direct Power Control of Matrix Converter-Fed DFIG with Fixed Switching Frequency" Sustainability 11, no. 9: 2604. https://doi.org/10.3390/su11092604
APA StyleYousefi-Talouki, A., Zalzar, S., & Pouresmaeil, E. (2019). Direct Power Control of Matrix Converter-Fed DFIG with Fixed Switching Frequency. Sustainability, 11(9), 2604. https://doi.org/10.3390/su11092604