Exploring the Factors Affecting Mode Choice Intention of Autonomous Vehicle Based on an Extended Theory of Planned Behavior—A Case Study in China

Abstract
:1. Introduction
2. Literature Review
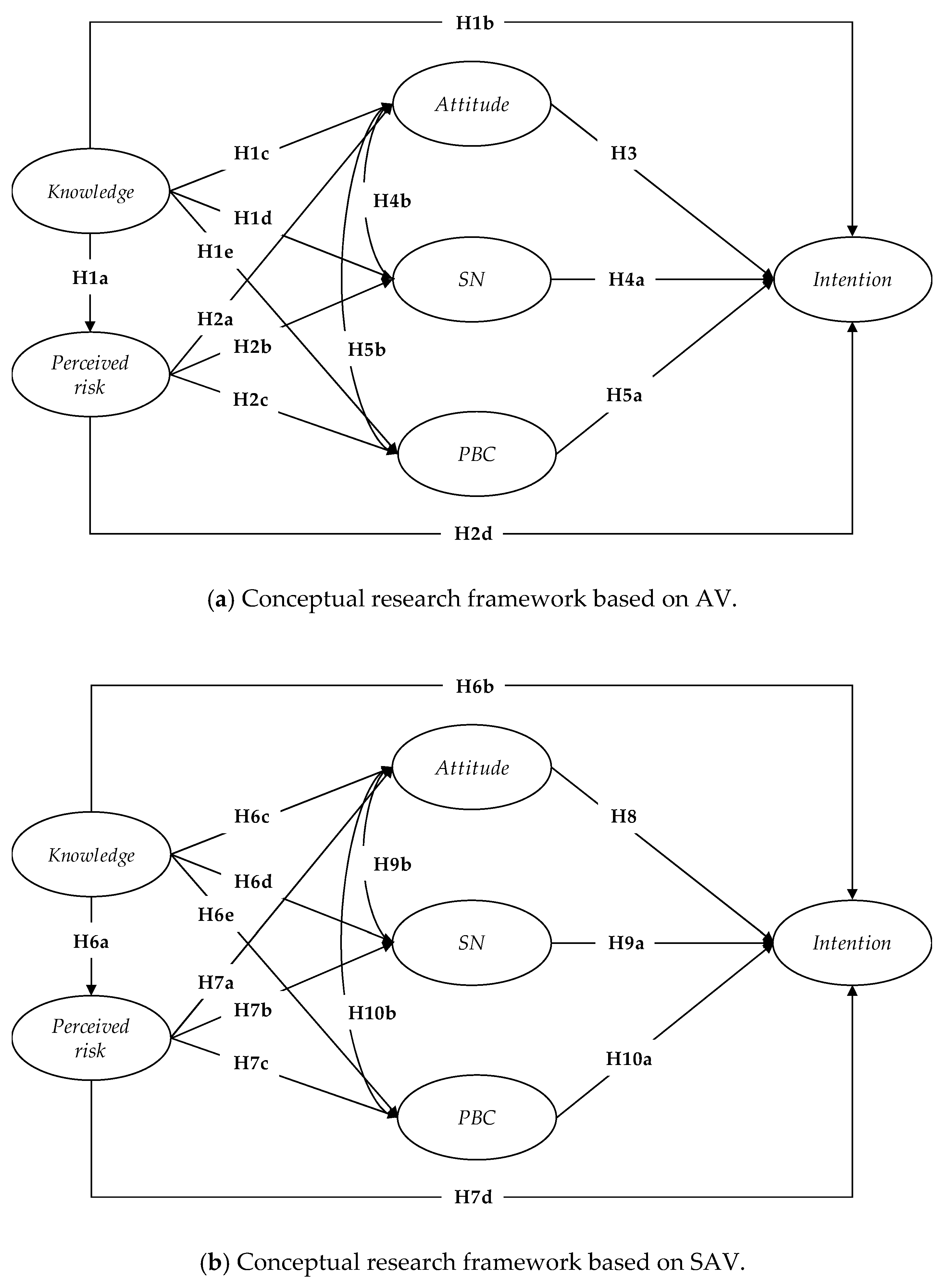
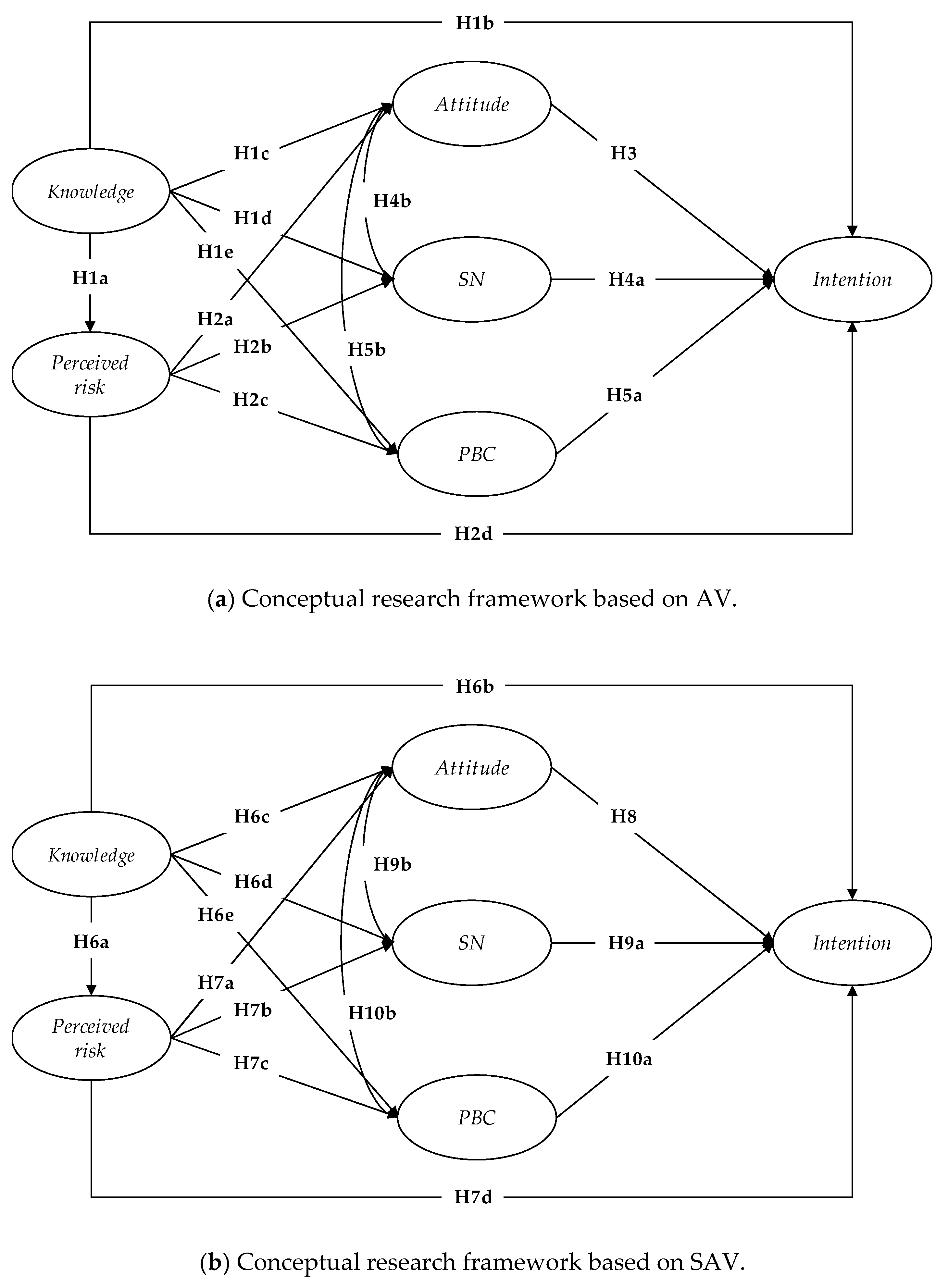
3. Theoretical Framework and Research Hypotheses
3.1. Knowledge about AVs (KN)
3.2. Perceived Risk (PR)
3.3. Attitudes toward Behavior (ATT)
3.4. Subjective Norm (SN)
3.5. Perceived Behavioral Control (PBC)
4. Methods
4.1. Survey Design
4.2. Sample and Data Collection
5. Analysis and Results
5.1. Demographics and Descriptive Findings
5.2. The Reliability and Validity of the TPB Questionnaire
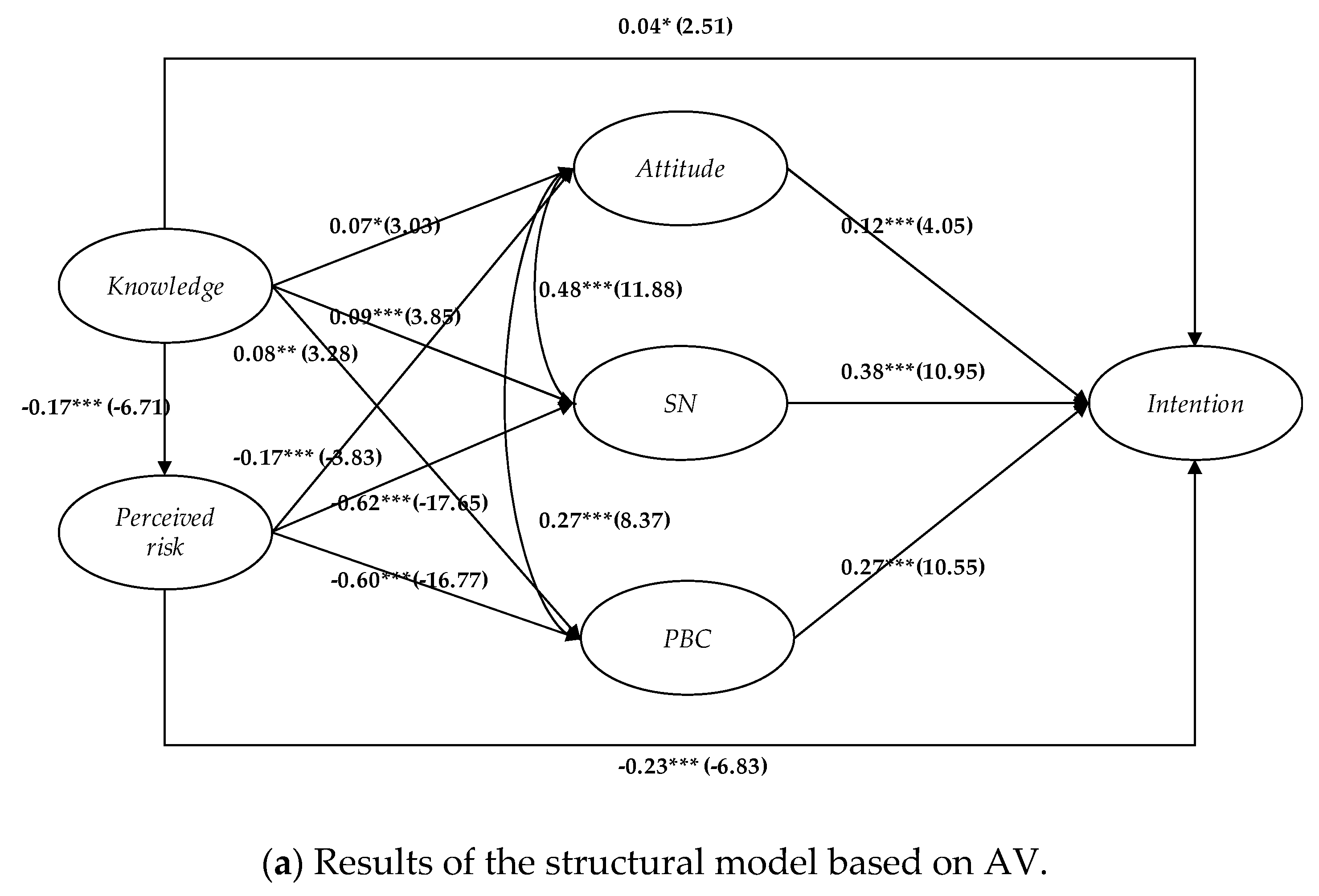
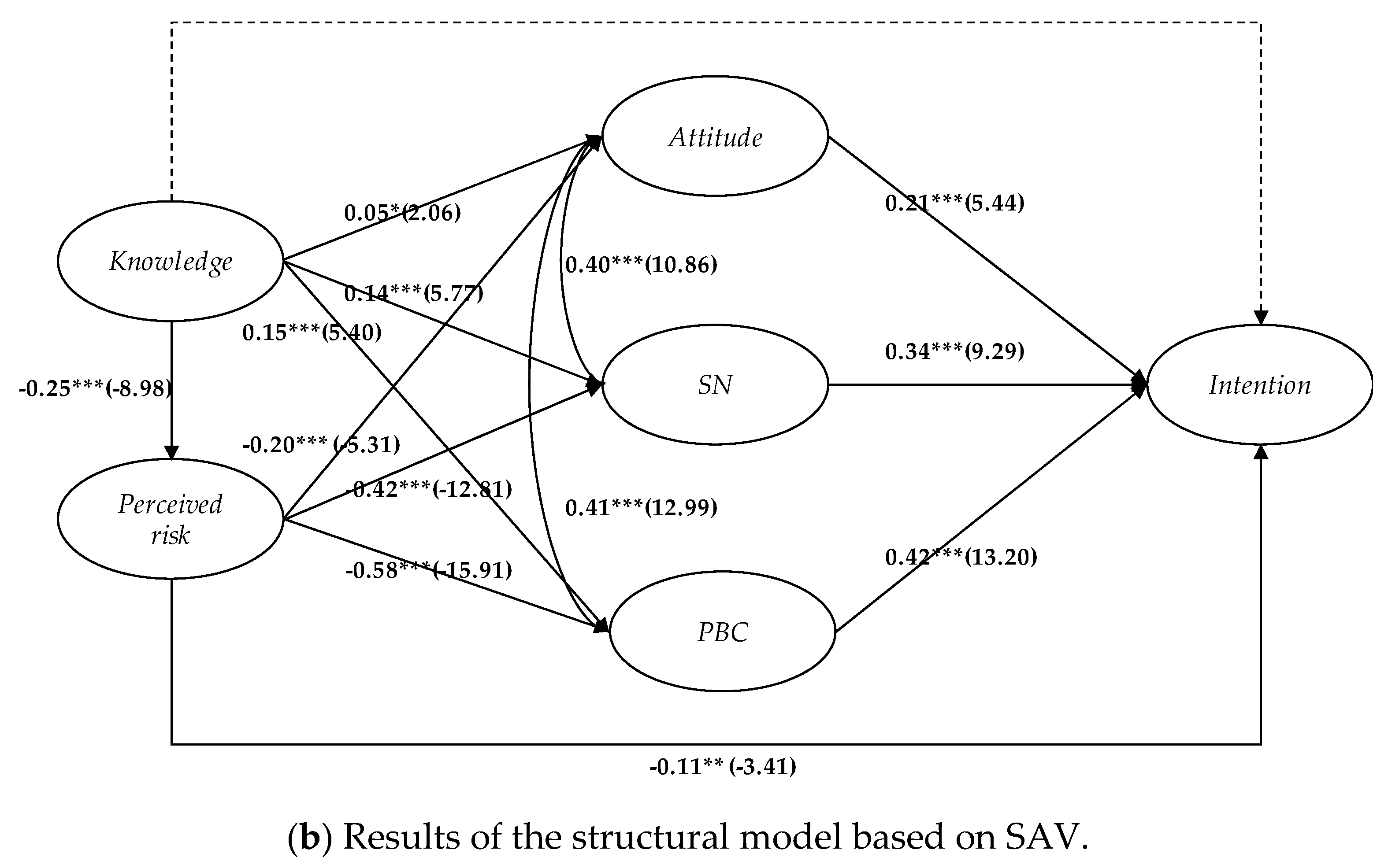
5.3. Structural Model and Hypothesis Tests
6. Discussion and Implications
6.1. Perceived Risk, Knowledge and Their Implications
6.2. Attitude and Its Implications
6.3. Subjective Norm and Its Implications
6.4. Perceived Behavior Control and Its Implications
7. Conclusions and Limitations
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Anderson, J.M.; Kalra, N.; Stanley, K.D.; Sorensen, P.; Samaras, C.; Oluwatola, O. Autonomous Vehicle Technology: A Guide for Policymakers; Rand Corporation: Santa Monica, CA, USA, 2014. [Google Scholar]
- Kuo, P.H.; Krishnamurthy, A.; Malmborg, C.J. Design models for unit load storage and retrieval systems using autonomous vehicle technology and resource conserving storage and dwell point policies. Appl. Math. Model. 2007, 31, 2332–2346. [Google Scholar] [CrossRef]
- Alam, M.J.; Habib, M.A. Investigation of the Impacts of Shared Autonomous Vehicle Operation in Halifax, Canada Using a Dynamic Traffic Microsimulation Model. Procedia Comput. Sci. 2018, 130, 496–503. [Google Scholar] [CrossRef]
- Menon, N.; Barbour, N.; Zhang, Y.; Pinjari, A.R.; Mannering, F. Shared autonomous vehicles and their potential impacts on household vehicle ownership: An exploratory empirical assessment. Int. J. Sustain. Transp. 2018, 1–12. [Google Scholar] [CrossRef]
- Shen, Y.; Zhang, H.; Zhao, J. Integrating shared autonomous vehicle in public transportation system: A supply-side simulation of the first-mile service in Singapore. Transp. Res. Part A Policy Pract. 2018, 113, 125–136. [Google Scholar] [CrossRef]
- Kim, S.-W.; Chong, Z.J.; Qin, B.; Shen, X.; Cheng, Z.; Liu, W.; Ang, M.H. Cooperative perception for autonomous vehicle control on the road: Motivation and experimental results. In Proceedings of the 2013 IEEE/RSJ International Conference onIntelligent Robots and Systems (IROS), Tokyo, Japan, 3–7 November 2013; pp. 5059–5066. [Google Scholar]
- Fagnant, D.J.; Kockelman, K. Preparing a nation for autonomous vehicles: opportunities, barriers and policy recommendations. Transp. Res. Part A 2015, 77, 167–181. [Google Scholar] [CrossRef]
- Kröger, L.; Kuhnimhof, T.; Trommer, S. Does context matter? A comparative study modelling autonomous vehicle impact on travel behaviour for Germany and the USA. Transp. Res. Part A Policy Pract. 2018. [Google Scholar] [CrossRef]
- Zhang, W.; Guhathakurta, S.; Fang, J.; Zhang, G. Exploring the impact of shared autonomous vehicles on urban parking demand: An agent-based simulation approach. Sustain. Cities Soc. 2015, 19, 34–45. [Google Scholar] [CrossRef]
- Zhang, W.; Guhathakurta, S.; Khalil, E.B. The impact of private autonomous vehicles on vehicle ownership and unoccupied VMT generation. Transp. Res. Part C Emerg. Technol. 2018, 90, 156–165. [Google Scholar] [CrossRef]
- Simoni, M.D.; Kockelman, K.M.; Gurumurthy, K.M.; Bischoff, J. Congestion pricing in a world of self-driving vehicles: An analysis of different strategies in alternative future scenarios. Transp. Res. Part C Emerg. Technol. 2019, 98, 167–185. [Google Scholar] [CrossRef]
- Bagloee, S.A.; Tavana, M.; Asadi, M.; Oliver, T. Autonomous vehicles: challenges, opportunities, and future implications for transportation policies. J. Mod. Transp. 2016, 24, 284–303. [Google Scholar] [CrossRef]
- Haboucha, C.J.; Ishaq, R.; Shiftan, Y. User preferences regarding autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2017, 78, 37–49. [Google Scholar] [CrossRef]
- Pakusch, C.; Stevens, G.; Boden, A.; Bossauer, P. Unintended effects of autonomous driving: A study on mobility preferences in the future. Sustainability 2018, 10, 2404. [Google Scholar] [CrossRef]
- Brummelen, J.V.; O’Brien, M.; Gruyer, D.; Najjaran, H. Autonomous vehicle perception: The technology of today and tomorrow. Transp. Res. Part C Emerg. Technol. 2018, 89, 384–406. [Google Scholar] [CrossRef]
- Bansal, P.; Kockelman, K.M. Forecasting Americans’ long-term adoption of connected and autonomous vehicle technologies. Transp. Res. Part A 2017, 95, 49–63. [Google Scholar] [CrossRef]
- Sinanian, M.H. Jailbreak!: What Happens When Autonomous Vehicle Owners Hack into Their Own Cars. Soc. Sci. Electron. Publ. 2017, 23, 357. [Google Scholar] [CrossRef]
- Fagnant, D.J. Shared autonomous vehicles: Model formulation, sub-problem definitions, implementation details, and anticipated impacts. In Proceedings of the American Control Conference, Chicago, IL, USA, 1–3 July 2015. [Google Scholar]
- Liu, J.; Kockelman, K.M.; Boesch, P.M.; Ciari, F. Tracking a system of shared autonomous vehicles across the Austin, Texas network using agent-based simulation. Transportation 2017, 44, 1–18. [Google Scholar] [CrossRef]
- Lam, A.Y.S.; Leung, Y.W.; Chu, X. Autonomous vehicle public transportation system. In Proceedings of the International Conference on Connected Vehicles and Expo (ICCVE), Messe Wien, Vienna, Austria, 3–7 November 2014; pp. 571–576. [Google Scholar]
- Moreno, A.T.; Michalski, A.; Llorca, C.; Moeckel, R. Shared Autonomous Vehicles Effect on Vehicle-Km Traveled and Average Trip Duration. J. Adv. Transp. 2018. [Google Scholar] [CrossRef]
- Winter, K.; Cats, O.; Martens, K.; van Arem, B. A Stated-Choice Experiment on Mode Choice in an Era of Free-Floating Carsharing and Shared Autonomous Vehicles. In Proceedings of the Transportation Research Board 96th Annual Meeting, Washington, DC, USA, 8–12 January 2017. [Google Scholar]
- Scheltes, A.; Correia, G.H.D.A. Exploring the use of automated vehicles as last mile connection of train trips through an agent-based simulation model: An application to Delft, Netherlands. Int. J. Transp. Sci. Technol. 2017, 6, 28–41. [Google Scholar] [CrossRef]
- Krueger, R.; Rashidi, T.H.; Rose, J.M. Preferences for shared autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2016, 69, 343–355. [Google Scholar] [CrossRef]
- LaMondia, J.J.; Fagnant, D.J.; Qu, H.; Barrett, J.; Kockelman, K. Long-Distance Travel Mode Shifts Due to Automated Vehicles: A Statewide Mode-Shift Simulation Experiment and Travel Survey Analysis. In Proceedings of the Transportation Research Board 95th Annual Meeting, Washington, DC, USA, 10–14 January 2016. [Google Scholar]
- Levin, M.W.; Boyles, S.D. Effects of autonomous vehicle ownership on trip, mode, and route choice. Transp. Res. Rec. 2015, 29–38. [Google Scholar] [CrossRef]
- Shabanpour, R.; Mousavi, S.N.D.; Golshani, N.; Auld, J.; Mohammadian, A. Consumer preferences of electric and automated vehicles. In Proceedings of the IEEE International Conference on MODELS and Technologies for Intelligent Transportation Systems, Napoli, Italy, 26–28 June 2017; pp. 716–720. [Google Scholar]
- Yap, M.D.; Correia, G.; Arem, B.V. Preferences of travellers for using automated vehicles as last mile public transport of multimodal train trips. Transp. Res. Part A Policy Pract. 2016, 94, 1–16. [Google Scholar] [CrossRef]
- Benakiva, M.; McFadden, D.; Train, K.; Walker, J.; Bhat, C.; Bierlaire, M.; Bolduc, D.; Boerschsupan, A.; Brownstone, D.; Bunch, D.S. Hybrid Choice Models: Progress and Challenges. Mark. Lett. 2002, 13, 163–175. [Google Scholar] [CrossRef]
- Steinmetz, H.; Knappstein, M.; Ajzen, I.; Schmidt, P.; Kabst, R. How effective are behavior change interventions based on the theory of planned behavior? A three-level meta-analysis. Z. Für Psychol. 2016, 224, 216–233. [Google Scholar] [CrossRef]
- Icek, A. The theory of planned behavior. Organ. Behav. Hum. Decis. Process. 1991, 50, 179–211. [Google Scholar]
- Blair, H.S.; Jon, H.; Paul, R.W. The Theory of Reasoned Action: A Meta-Analysis of Past Research with Recommendations for Modifications and Future Research. J. Consum. Res. 1988, 15, 325–343. [Google Scholar]
- Ma, H.; Yang, X.; Shi, Q. Motorization process and management in big cities in China: Take Beijing as an Example. IATSS Res. 2007, 31, 42–47. [Google Scholar] [CrossRef]
- Deng, H.; Ma, A.C. Market structure and pricing strategy of China’s automobile industry. J. Ind. Econ. 2010, 58, 818–845. [Google Scholar] [CrossRef]
- Bansal, P.; Kockelman, K.M. Are we ready to embrace connected and self-driving vehicles? A case study of Texans. Transportation 2018, 45, 1–35. [Google Scholar] [CrossRef]
- Bansal, P.; Kockelman, K.M.; Singh, A. Assessing public opinions of and interest in new vehicle technologies: An Austin perspective. Transp. Res. Part C 2016, 67, 1–14. [Google Scholar] [CrossRef]
- Kyriakidis, M.; Happee, R.; de Winter, J.C.F. Public opinion on automated driving: Results of an international questionnaire among 5000 respondents. Transp. Res. Part F: Traffic Psychol. Behav. 2015, 32, 127–140. [Google Scholar] [CrossRef]
- Nazari, F.; Noruzoliaee, M.; Mohammadian, A.K. Shared versus private mobility: Modeling public interest in autonomous vehicles accounting for latent attitudes. Transp. Res. Part C 2018, 97, 456–477. [Google Scholar] [CrossRef]
- Kaplan, S. Beyond rationality: Clarity-based decision making. In Environment, Cognition, and Action: An Integrated Approach; Oxford University Press: New York, NY, USA, 1991; pp. 171–190. [Google Scholar]
- Park, C.W.; Mothersbaugh, D.L.; Feick, L. Consumer Knowledge Assessment. J. Consum. Res. 1994, 21, 71–82. [Google Scholar] [CrossRef]
- Wei-Yun, Y.E.; Feng, Z.G.; Wei-Bin, W.U. Investigation on consumer’s knowledge and practice about nutrition labeling of food in Guangzhou. Mod. Prev. Med. 2010, 37, 1850–1852. [Google Scholar]
- Qian, L.; Yin, J. Linking Chinese cultural values and the adoption of electric vehicles: The mediating role of ethical evaluation. Transp. Res. Part D Transp. Environ. 2017, 56, 175–188. [Google Scholar] [CrossRef]
- Simsekoglu, Ö.; Klöckner, C. Factors related to the intention to buy an e-bike: A survey study from Norway. Transp. Res. Part F: Traffic Psychol. Behav. 2019, 60, 573–581. [Google Scholar] [CrossRef]
- Barth, M.; Jugert, P.; Fritsche, I. Still underdetected—Social norms and collective efficacy predict the acceptance of electric vehicles in Germany. Transp. Res. Part F Psychol. Behav. 2016, 37, 64–77. [Google Scholar] [CrossRef]
- Krause, R.M.; Carley, S.R.; Lane, B.W.; Graham, J.D. Perception and reality: Public knowledge of plug-in electric vehicles in 21 U.S. cities. Energy Policy 2013, 63, 433–440. [Google Scholar] [CrossRef]
- Roselius, T. Consumer Rankings of Risk Reduction Methods. J. Mark. 1971, 35, 56–61. [Google Scholar] [CrossRef]
- Mitchell, V.W. Consumer perceived risk: Conceptualisations and models. Eur. J. Mark. 1999, 33, 163–195. [Google Scholar] [CrossRef]
- Marriott, H.R.; Williams, M.D. Exploring consumers perceived risk and trust for mobile shopping: A theoretical framework and empirical study. J. Retail. Consum. Serv. 2018, 42, 133–146. [Google Scholar] [CrossRef]
- Chopdar, P.K.; Korfiatis, N.; Sivakumar, V.J.; Lytras, M.D. Mobile shopping apps adoption and perceived risks: A cross-country perspective utilizing the Unified Theory of Acceptance and Use of Technology &z.star. Comput. Hum. Behav. 2018, 86, 109–128. [Google Scholar]
- Menon, N.; Pinjari, A.; Zhang, Y.; Zou, L. Consumer Perception and Intended Adoption of Autonomous-Vehicle Technology: Findings from a University Population Survey. In Proceedings of the Transportation Research Board 95th Annual Meeting, Washington DC, USA, 10–14 January 2016. [Google Scholar]
- Zmud, J.; Sener, I.N.; Wagner, J. Consumer Acceptance and Travel Behavior: Impacts of Automated Vehicles; Texas A&M Transportation Institute: College Station, TX, USA, 2016.
- Boumiza, S.; Braham, R. Intrusion Threats and Security Solutions for Autonomous Vehicle Networks. In Proceedings of the IEEE/ACS International Conference on Computer Systems & Applications, Hammamet, Tunisia, 30 October–3 November 2017. [Google Scholar]
- Ryerson, M.S.; Miller, J.E.; Winston, F.K. Edge conditions and crash-avoidance roles: The future of traffic safety in the world of autonomous vehicles. Inj. Prev. 2018. [Google Scholar] [CrossRef] [PubMed]
- Park, E.; Ohm, J.Y. Factors influencing the public intention to use renewable energy technologies in South Korea: Effects of the Fukushima nuclear accident. Energy Policy 2014, 65, 198–211. [Google Scholar] [CrossRef]
- Featherman, M.S.; Pavlou, P.A. Predicting e-services adoption: a perceived risk facets perspective. Int. J. Hum. Comput. Stud. 2003, 59, 451–474. [Google Scholar] [CrossRef]
- Ajzen, I.; Cote, N.G. Attitudes and the prediction of behavior. In Frontiers of Social Psychology. Attitudes and Attitude Change; Psychology Press: New York, NY, USA, 2008; pp. 289–311. [Google Scholar]
- Liu, D.; Du, H.; Southworth, F.; Ma, S. The influence of social-psychological factors on the intention to choose low-carbon travel modes in Tianjin, China. Transp. Res. Part A Policy Pract. 2017, 105, 42–53. [Google Scholar] [CrossRef]
- Stark, J.; Hössinger, R. Attitudes and mode choice: Measurement and evaluation of interrelation. Transp. Res. Procedia 2018, 32, 501–512. [Google Scholar] [CrossRef]
- Gao, Y.; Chen, X.; Shan, X.; Fu, Z. Active commuting among junior high school students in a Chinese medium-sized city: Application of the theory of planned behavior. Transp. Res. Part F Traffic Psychol. Behav. 2018, 56, 46–53. [Google Scholar] [CrossRef]
- Peng, J.; Jing, W.; Long, C.; Zha, Q. Incorporating the extended theory of planned behavior in a school travel mode choice model: a case study of Shaoxing, China. Transp. Plan. Technol. 2017, 41, 1–19. [Google Scholar]
- Wang, S.; Jin, F.; Zhao, D.; Shu, Y.; Fu, Y. Predicting consumers’ intention to adopt hybrid electric vehicles: Using an extended version of the theory of planned behavior model. Transportation 2016, 43, 123–143. [Google Scholar] [CrossRef]
- Pan, J.Y.; Truong, D. Passengers’ intentions to use low-cost carriers: An extended theory of planned behavior model. J. Air Transp. Manag. 2018, 69, 38–48. [Google Scholar] [CrossRef]
- Huang, C.C.; Lu, L.C. Examining the Roles of Collectivism, Attitude Toward Business, and Religious Beliefs on Consumer Ethics in China. J. Bus. Ethics 2016, 146, 1–10. [Google Scholar] [CrossRef]
- Chen, C.C.; Meindl, J.R.; Hunt, R.G. Testing the effects of vertical and horizontal collectivism: A study of reward allocation preferences in China. Cross Cult. Psychol. 1997, 28, 44–70. [Google Scholar] [CrossRef]
- Du, H.; Liu, D.; Sovacool, B.K.; Wang, Y.; Ma, S.; Li, R.Y.M. Who buys New Energy Vehicles in China? Assessing social-psychological predictors of purchasing awareness, intention, and policy. Transp. Res. Part F: Traffic Psychol. Behav. 2018, 58, 56–69. [Google Scholar] [CrossRef]
- Howard, D.; Dai, D. Public perceptions of self-driving cars: The case of Berkeley, California. In Proceedings of the Transportation Research Board 93rd Annual Meeting, Washington DC, USA, 12–16 January 2014. [Google Scholar]
- Matell, M.S.; Jacoby, J. Is There an Optimal Number of Alternatives for Likert Scale Items? Study I: Reliability and Validity. Educ. Psychol. Meas. 1971, 31, 657–674. [Google Scholar] [CrossRef]
- Donald, I.J.; Cooper, S.R.; Conchie, S.M. An extended theory of planned behaviour model of the psychological factors affecting commuters’ transport mode use. J. Environ. Psychol. 2014, 40, 39–48. [Google Scholar] [CrossRef]
- Lanzini, P.; Khan, S.A. Shedding light on the psychological and behavioral determinants of travel mode choice: A meta-analysis. Transp. Res. Part F Traffic Psychol. Behav. 2017, 48, 13–27. [Google Scholar]
- Wang, S.; Wang, J.; Li, J.; Wang, J.; Liang, L. Policy implications for promoting the adoption of electric vehicles: Do consumer’s knowledge, perceived risk and financial incentive policy matter? Transp. Res. Part A Policy Pract. 2018, 117, 58–69. [Google Scholar] [CrossRef]
- Parkins, J.R.; Rollins, C.; Anders, S.; Comeau, L. Predicting intention to adopt solar technology in Canada: The role of knowledge, public engagement, and visibility. Energy Policy 2018, 114, 114–122. [Google Scholar] [CrossRef]
- Liao, F.; Molin, E.; Timmermans, H.; van Wee, B. Consumer preferences for business models in electric vehicle adoption. Transp. Policy 2019, 73, 12–24. [Google Scholar] [CrossRef]
- Hair, J.F.; Sarstedt, M.; Hopkins, L.; G. Kuppelwieser, V. Partial least squares structural equation modeling (PLS-SEM) An emerging tool in business research. Eur. Bus. Rev. 2014, 26, 106–121. [Google Scholar] [CrossRef]
- Fornell, C.; Larcker, D.F. Evaluating structural equation models with unobservable variables and measurement error. J. Mark. Res. 1981, 18, 39–50. [Google Scholar] [CrossRef]
- Tracey, M.; Vonderembse, M.A.; Lim, J.S. Manufacturing technology and strategy formulation: keys to enhancing competitiveness and improving performance. J. Oper. Manag. 1999, 17, 411–428. [Google Scholar] [CrossRef]
- Ajzen, I.; Joyce, N.; Sheikh, S.; Cote, N.G. Knowledge and the Prediction of Behavior: The Role of Information Accuracy in the Theory of Planned Behavior. Basic Appl. Soc. Psychol. 2011, 33, 101–117. [Google Scholar] [CrossRef]
- Fishbein, M.; Ajzen, I. Belief, Attitude, Intention and Behavior: An Introduction to Theory and Research; Addison-Wesley Pub. Co.: Boston, MA, USA, 1975. [Google Scholar]
- Jai, B.P.S.; Neharika, V.; Sushila, S.; Sinha, R.B.N.; Ushashree, S. Normative predictions of collectivist-individualist intentions and behaviour of Indians. Int. J. Psychol. 2002, October 01, 309–319. [Google Scholar]
- Chang, Y.W.; Hsu, P.Y.; Shiau, W.L.; Tsai, C.C. Knowledge sharing intention in the United States and China: A cross-cultural study. Eur. J. Inf. Syst. 2015, 24, 262–277. [Google Scholar] [CrossRef]
- İbrahim, A.; Atalar, T. The Exploring Relationships between Environmental Concern, Collectivism and Ecological Purchase Intention. Procedia Soc. Behav. Sci. 2016, 235, 514–521. [Google Scholar]
- Katila, R.; Ahuja, G. Something Old, Something New: A Longitudinal Study of Search Behavior and New Product Introduction. Acad. Manag. J. 2002, 45, 1183–1194. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
| Author | Country/Area | Research Object | Influence Factors | Method |
|---|---|---|---|---|
| Nazari et al., 2018 [38] | USA | carsharing, ridesourcing, and ridesharing with AVs | latent variable | SP experiment |
| Haboucha et al., 2017 [13] | Israel/North America | current car, private AV and SAV | demographic variable travel attribute latent variable | SP experiment |
| Winter et al., 2017 [22] | Netherlands | free-floating carsharing services and SAV | demographic variable travel attribute | SP experiment |
| Liu et al., 2017 [19] | Austin, USA | human-driven vehicle, SAV, and transit | travel attribute | Agent-based simulation |
| Scheltes et al., 2017 [23] | Netherlands | AV, walking/bicycle and transit | travel attribute | Agent-based simulation |
| Shabanpour et al., 2017 [27] | Chicago, USA | non-automated gasoline vehicle, non-automated electric vehicle, automated gasoline vehicle, and automated electric vehicle | demographic variable travel attribute opinion-based variable | SP experiment |
| Krueger et al., 2016 [24] | Australia | SAV, SAV without ride-sharing and public transit | demographic variable travel attribute | SP experiment |
| MD Yap et al., 2016 [28] | Netherlands | AV, bus/tram/metro, and bike | demographic variable travel attribute latent variable | SP experiment |
| LaMondia et al., 2016 [25] | USA | AV, personal vehicle and air | travel attribute | Four-step planning model |
| Levin et al., 2015 [26] | USA | AV with parking or repositioning, and transit | travel attribute | Four-step planning model |
| Variables | Measuring Item | Source |
|---|---|---|
| Attitude (ATT) | ||
| av_att1 av_att2 av_att3 | For me, adopting an AV is unfavorable/favorable. For me, adopting an AV is negative/positive. For me, adopting an AV is undesirable/desirable. | Azjen [31] |
| Subjective Norm (SN) | ||
| av_sn1 av_sn2 av_sn3 | People who are important to me expect that I should use an AV in the future. People who significant to me (such as relatives and friends) support my use of AVs. If people around me use AVs, I will also use AVs. | Azjen [31] Donald et al. [68] |
| Perceived Behavioral Control (PBC) | ||
| av_pbc1 av_pbc2 av_pbc3 | I have enough opportunity to use an AV when traveling. Whether or not I use an AV when traveling is completely up to me. I have enough resources (money) to use an AV when traveling. | Azjen [31] Lanzini et al. [69] |
| Perceived risk (PR) | ||
| av_pr1 av_pr2 av_pr3 | I am worried about bring me and my family certain risks when using AVs. I am afraid of suffering financial and time losses when using AVs. I am worried that the function and the system cause me trouble when using AVs. | Mitchell and Vincent-Wayne [47] Wang et al. [70] |
| Knowledge (KN) | ||
| av_kn1 av_kn2 av_kn3 | I am familiar with the performance of AVs (such as operating procedures, driving comfort, and driving distance). I am familiar with the cost of using AVs. I know the advantages of AVs over traditional cars (such as improving safety and easing traffic congestion). | Parkins et al. [71] Liao et al. [72] |
| Intention (INT) | ||
| av_int1 av_int2 av_int3 av_int4 | I might use an AV when AVs enter the market. I plan to use an AV when AVs enter the market. I try to use an AV when AVs enter the market. I give priority to using AVs if I need to use a car when AVs enter the market. | Azjen [31] Lanzini et al. [69] |
| Variables | Frequency | Percentage (%) |
|---|---|---|
| Gender Male Female | 487 419 | 53.75% 46.25% |
| Age 18–25 26–35 36–45 >45 | 272 261 164 209 | 30.02% 28.81% 18.10% 23.07% |
| Education Junior school and below High school College Bachelor Master or above | 58 131 238 424 55 | 6.40% 14.46% 26.27% 46.80% 6.07% |
| Income <2000 2001–4000 4001–6000 6001–8000 >8000 | 292 260 182 77 95 | 32.23% 28.70% 20.09% 8.50% 10.48% |
| Awareness of AV technology Strongly Agree Agree Undecided Disagree Strongly Disagree | 91 270 401 112 32 | 10.04% 29.80% 44.26% 12.36% 3.54% |
| Construct | Measures | Means | SD | Cronbach’α | Standardized Factor Loading | CR | AVE |
|---|---|---|---|---|---|---|---|
| ATT | av_att1 | 3.82 | 0.791 | 0.940 | 0.944 | 0.939 | 0.836 |
| av_att2 | 3.81 | 0.813 | 0.930 | ||||
| av_att3 | 3.71 | 0.811 | 0.867 | ||||
| SN | av_sn1 | 3.58 | 0.750 | 0.892 | 0.880 | 0.893 | 0.736 |
| av_sn2 | 3.57 | 0.749 | 0.851 | ||||
| av_sn3 | 3.56 | 0.740 | 0.842 | ||||
| PBC | av_pbc1 | 3.65 | 0.732 | 0.908 | 0.969 | 0.916 | 0.786 |
| av_pbc2 | 3.66 | 0.768 | 0.726 | ||||
| av_pbc3 | 3.62 | 0.732 | 0.945 | ||||
| PR | av_pr1 | 2.45 | 0.704 | 0.936 | 0.895 | 0.936 | 0.829 |
| av_pr2 | 2.47 | 0.745 | 0.912 | ||||
| av_pr3 | 2.48 | 0.745 | 0.924 | ||||
| KN | av_kn1 | 3.51 | 0.946 | 0.928 | 0.920 | 0.928 | 0.811 |
| av_kn2 | 3.48 | 0.997 | 0.863 | ||||
| av_kn3 | 3.46 | 1.029 | 0.918 | ||||
| INT | av_int1 | 3.61 | 0.779 | 0.939 | 0.876 | 0.935 | 0.782 |
| av_int2 | 3.64 | 0.795 | 0.883 | ||||
| av_int3 | 3.58 | 0.776 | 0.883 | ||||
| av_int4 | 3.57 | 0.749 | 0.895 |
| ATT | SN | PBC | PR | KN | INT | |
|---|---|---|---|---|---|---|
| ATT | 0.836 | |||||
| SN | 0.703 | 0.736 | ||||
| PBC | 0.623 | 0.691 | 0.786 | |||
| PR | −0.554 | −0.598 | −0.538 | 0.829 | ||
| KN | 0.278 | 0.254 | 0.222 | −0.235 | 0.811 | |
| INT | 0.692 | 0.712 | 0.727 | −0.669 | 0.296 | 0.782 |
| Hypotheses | Path | Standardized Estimate | C.R. | P | Supported (p < 0.05) |
|---|---|---|---|---|---|
| H1a | PR ← KN | −0.17 | −6.71 | *** | Yes |
| H1b | INT ← KN | 0.04 | 2.51 | 0.012 | Yes |
| H1c | ATT ← KN | 0.07 | 3.03 | 0.002 | Yes |
| H1d | SN ← KN | 0.09 | 3.86 | *** | Yes |
| H1e | PBC← KN | 0.08 | 3.28 | 0.001 | Yes |
| H2a | ATT ← PR | −0.17 | −3.83 | *** | Yes |
| H2b | SN ← PR | −0.62 | −17.65 | *** | Yes |
| H2c | PBC← PR | −0.60 | −16.77 | *** | Yes |
| H2d | INT ← PR | −0.23 | −6.83 | *** | Yes |
| H3 | INT ← ATT | 0.12 | 4.05 | *** | Yes |
| H4a | INT ← SN | 0.38 | 10.95 | *** | Yes |
| H4b | ATT ← SN | 0.48 | 11.88 | *** | Yes |
| H5a | INT ← PBC | 0.27 | 10.55 | *** | Yes |
| H5b | ATT ← PBC | 0.27 | 8.37 | *** | Yes |
| Hypotheses | Path | Standardized Estimate | C.R. | P | Supported (p < 0.05) |
|---|---|---|---|---|---|
| H6a | PR ← KN | −0.25 | −8.98 | *** | Yes |
| H6b | INT ← KN | 0.03 | 1.34 | 0.179 | No |
| H6c | ATT ← KN | 0.05 | 2.06 | 0.040 | Yes |
| H6d | SN ← KN | 0.14 | 5.77 | *** | Yes |
| H6e | PBC← KN | 0.15 | 5.40 | *** | Yes |
| H7a | ATT ← PR | −0.20 | −5.31 | *** | Yes |
| H7b | SN ← PR | −0.42 | −12.81 | *** | Yes |
| H7c | PBC← PR | −0.58 | −15.91 | *** | Yes |
| H7d | INT ← PR | −0.11 | −3.41 | *** | Yes |
| H8 | INT ← ATT | 0.21 | 5.44 | *** | Yes |
| H9a | INT ← SN | 0.34 | 9.29 | *** | Yes |
| H9b | ATT ← SN | 0.40 | 10.86 | *** | Yes |
| H10a | INT ← PBC | 0.42 | 13.20 | *** | Yes |
| H10b | ATT ← PBC | 0.41 | 12.99 | *** | Yes |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jing, P.; Huang, H.; Ran, B.; Zhan, F.; Shi, Y. Exploring the Factors Affecting Mode Choice Intention of Autonomous Vehicle Based on an Extended Theory of Planned Behavior—A Case Study in China. Sustainability 2019, 11, 1155. https://doi.org/10.3390/su11041155
Jing P, Huang H, Ran B, Zhan F, Shi Y. Exploring the Factors Affecting Mode Choice Intention of Autonomous Vehicle Based on an Extended Theory of Planned Behavior—A Case Study in China. Sustainability. 2019; 11(4):1155. https://doi.org/10.3390/su11041155
Chicago/Turabian StyleJing, Peng, Hao Huang, Bin Ran, Fengping Zhan, and Yuji Shi. 2019. "Exploring the Factors Affecting Mode Choice Intention of Autonomous Vehicle Based on an Extended Theory of Planned Behavior—A Case Study in China" Sustainability 11, no. 4: 1155. https://doi.org/10.3390/su11041155
APA StyleJing, P., Huang, H., Ran, B., Zhan, F., & Shi, Y. (2019). Exploring the Factors Affecting Mode Choice Intention of Autonomous Vehicle Based on an Extended Theory of Planned Behavior—A Case Study in China. Sustainability, 11(4), 1155. https://doi.org/10.3390/su11041155