Dynamic Update and Monitoring of AOI Entrance via Spatiotemporal Clustering of Drop-Off Points





Abstract
1. Introduction
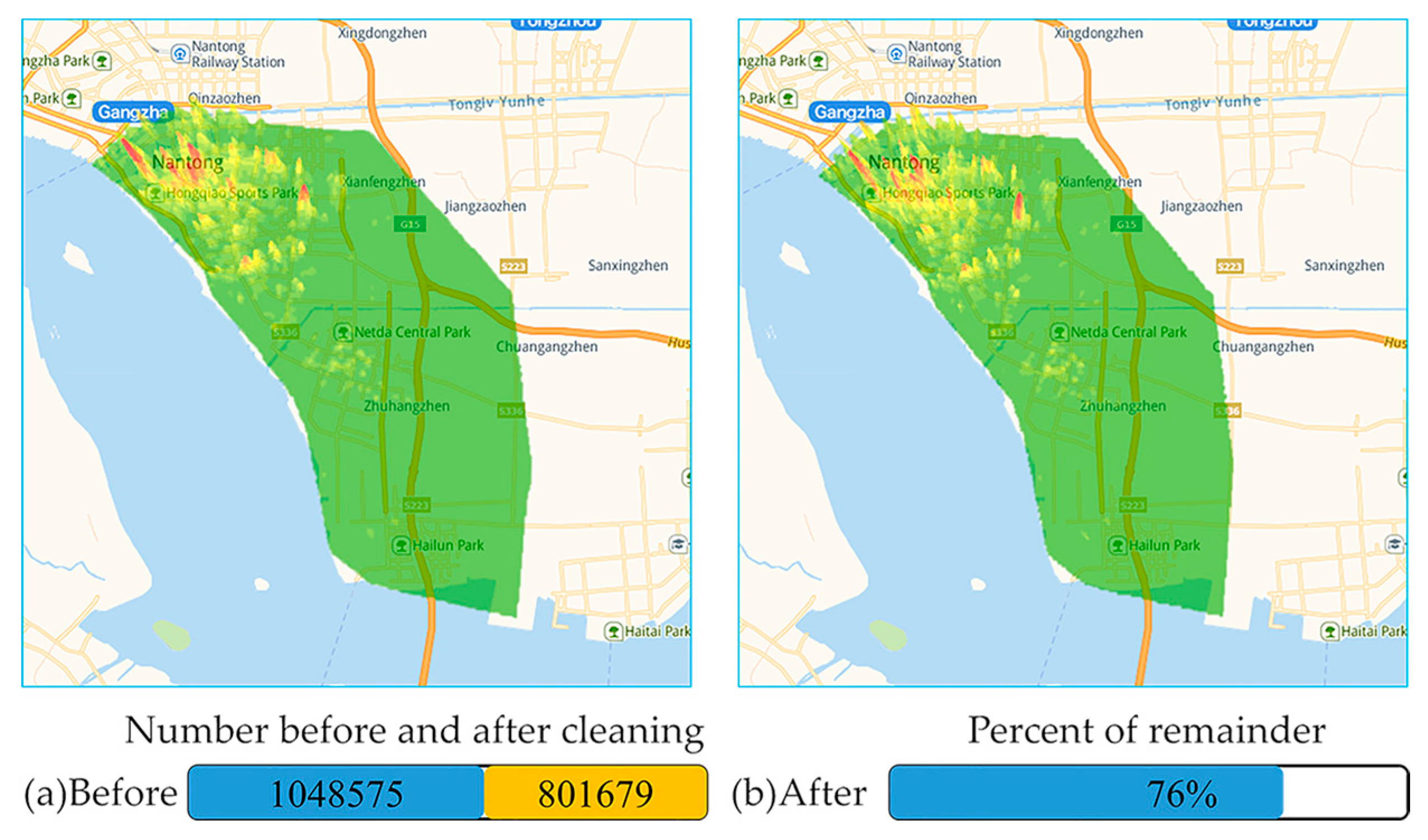
- We ensure the position precision of drop-off points via fine-grained data cleaning, which is used for the location extraction of the AOI entrances; this method can be used in the similar work based on the FCD.
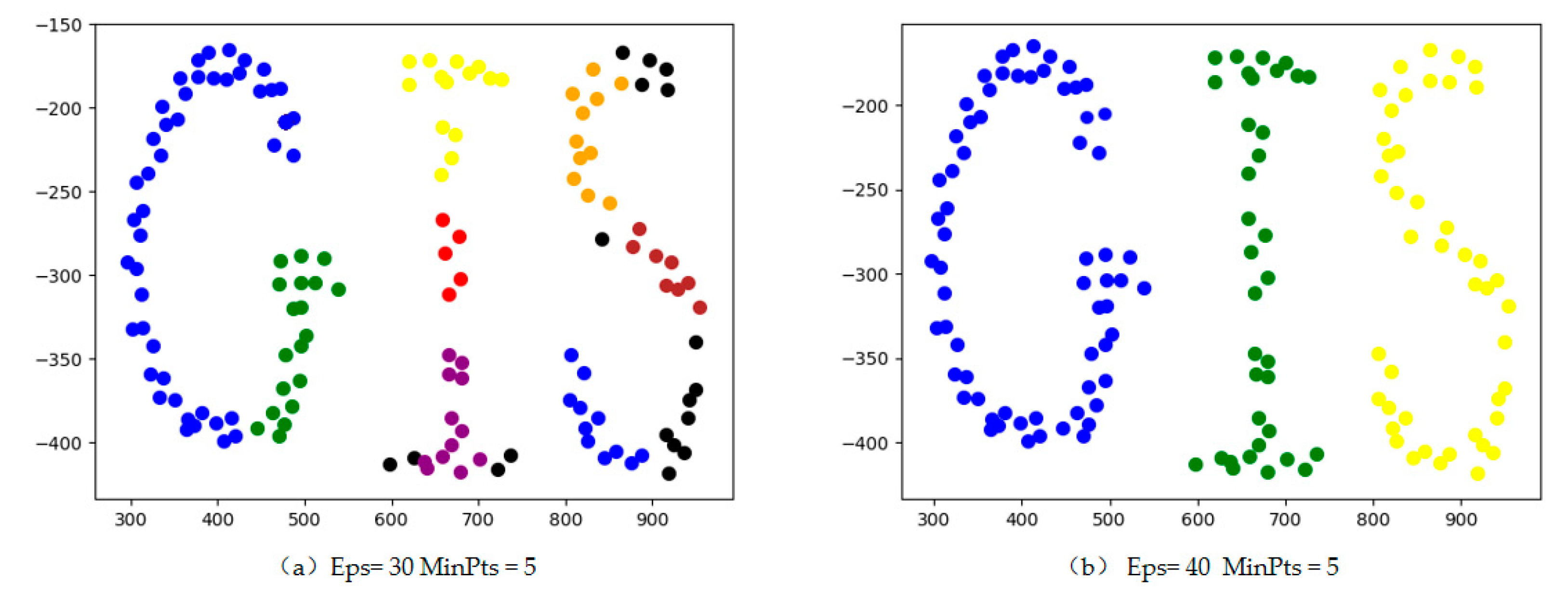
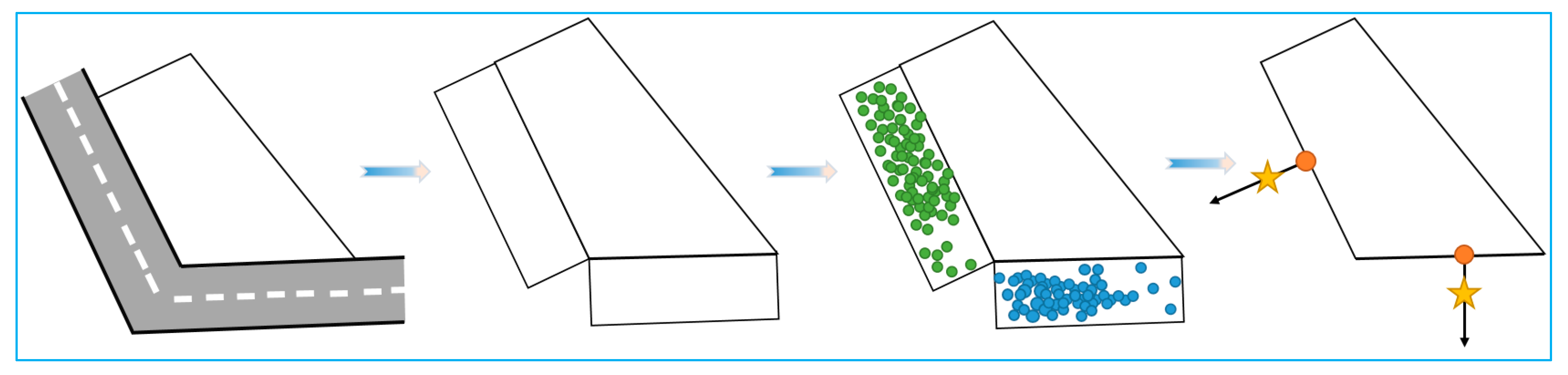
- We apply the constrained DBSCAN to find the drop-off clusters belonging to each entrance, and then infer the entrance location combined with the boundary of the AOI. Thus, the work addresses the concern that it is hard to quantify the parameters of DBSCAN to be extended.
- We propose a quantitative indicator to detect the access status of the entrance. Thus, it can enrich the expression of the map symbols, and then improve the navigation performance of the mobile map.
2. Methodology and Data Preprocessing
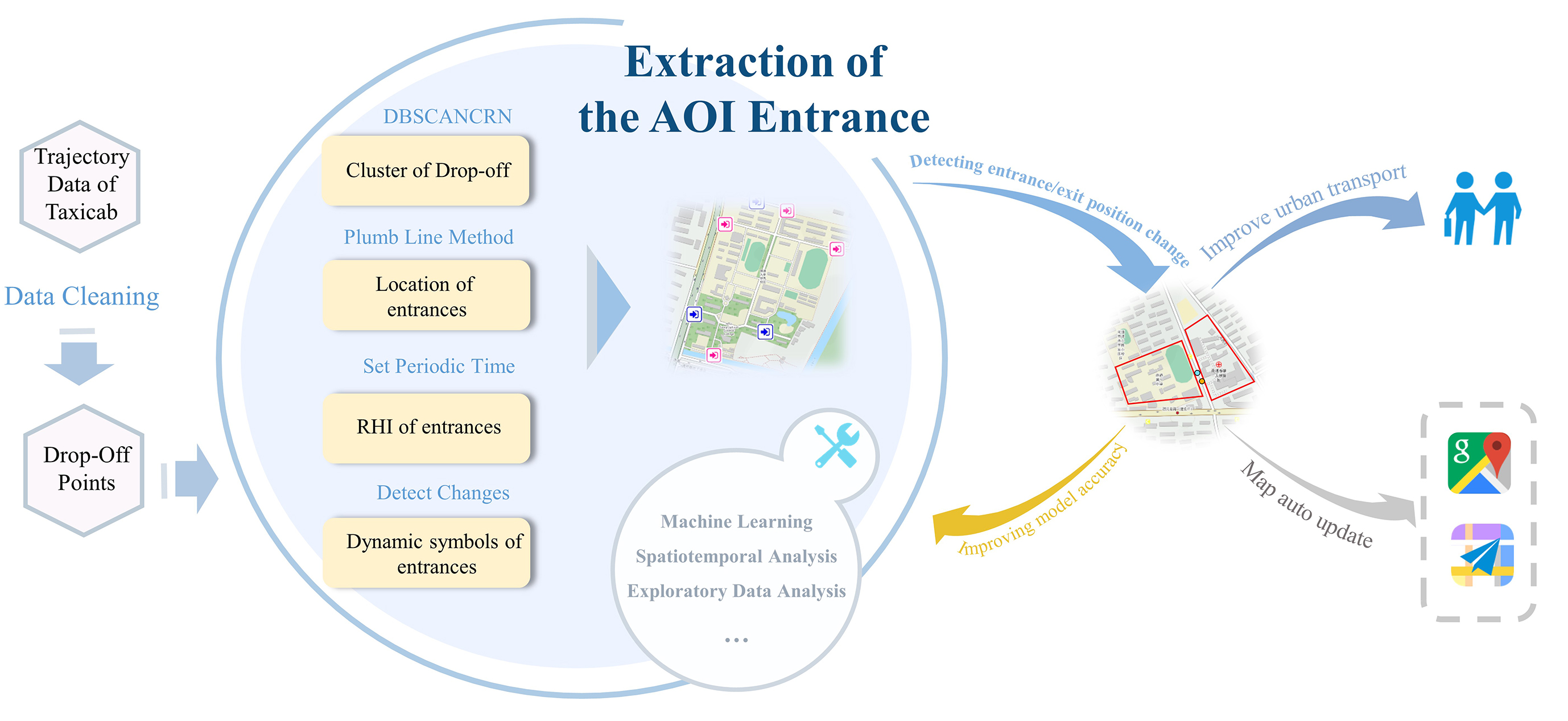
2.1. The Framework of the Research
2.2. Data and Study Area
2.2.1. Trajectory Data of Taxicab
2.2.2. AOI and Road Network Data
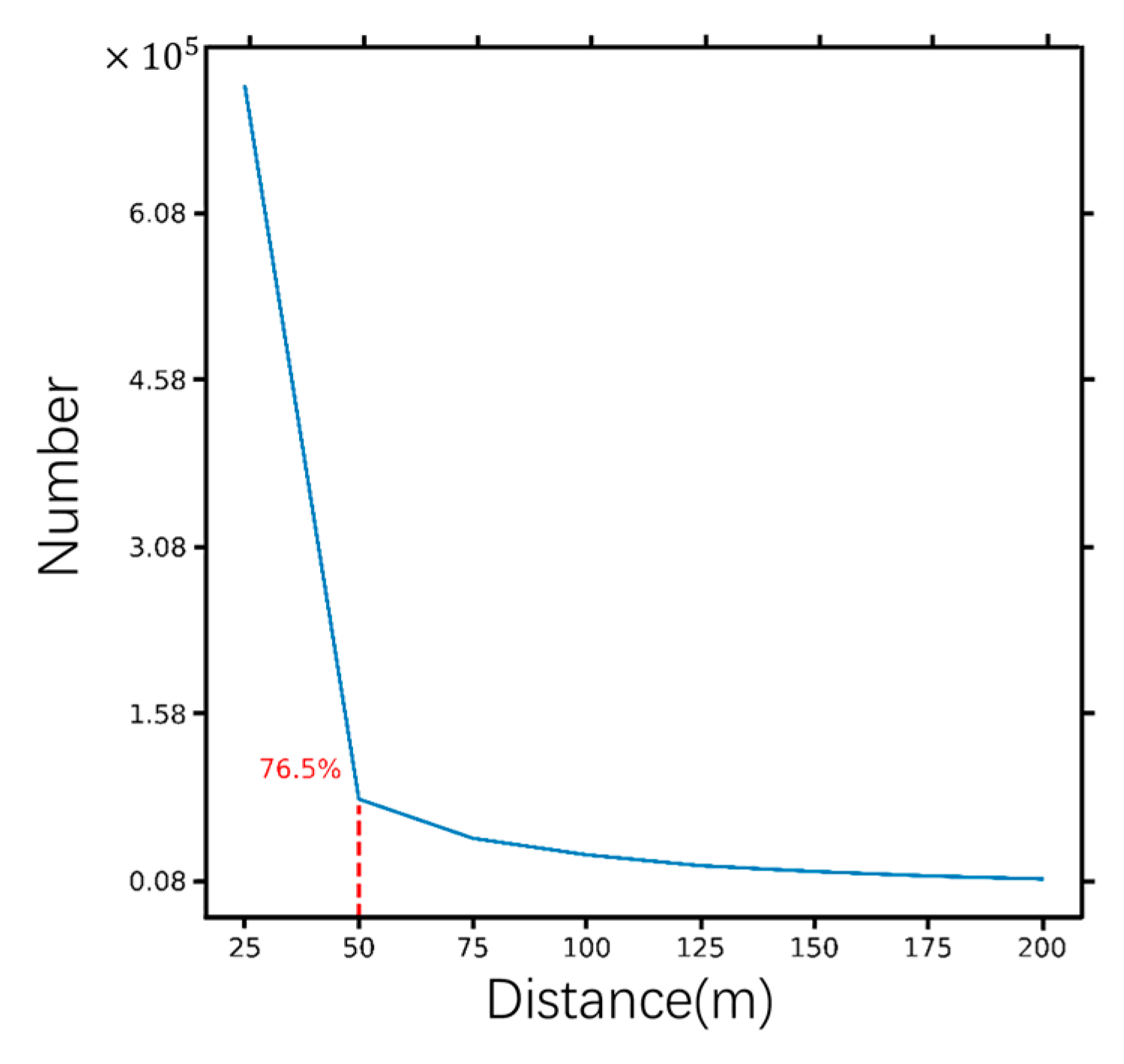
2.3. Cleaning of the Drop-Off Points
3. The Extraction Process of the Entrances
3.1. Limitation of the Existing Methods
3.2. Extraction Approach for the AOI Entrances
| Algorithm 1: Pseudo-code of the DBSCANCRN algorithm. |
begin for each B in A for each P in B DBSCAN clustering of drop-off points in set P end forend for output C end |
4. Results and Analysis
4.1. Cleaning Effect of the Drop-Off Points
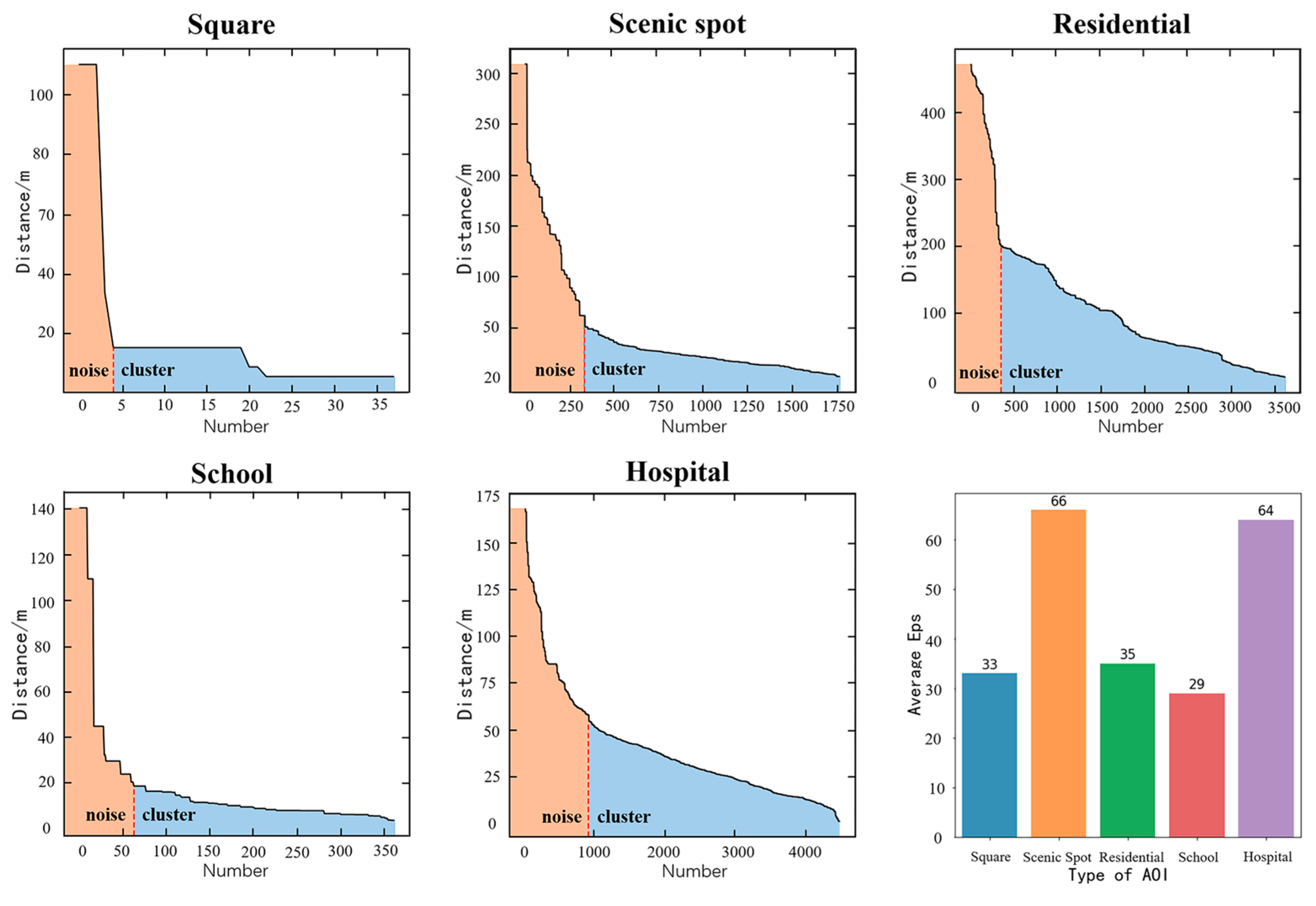
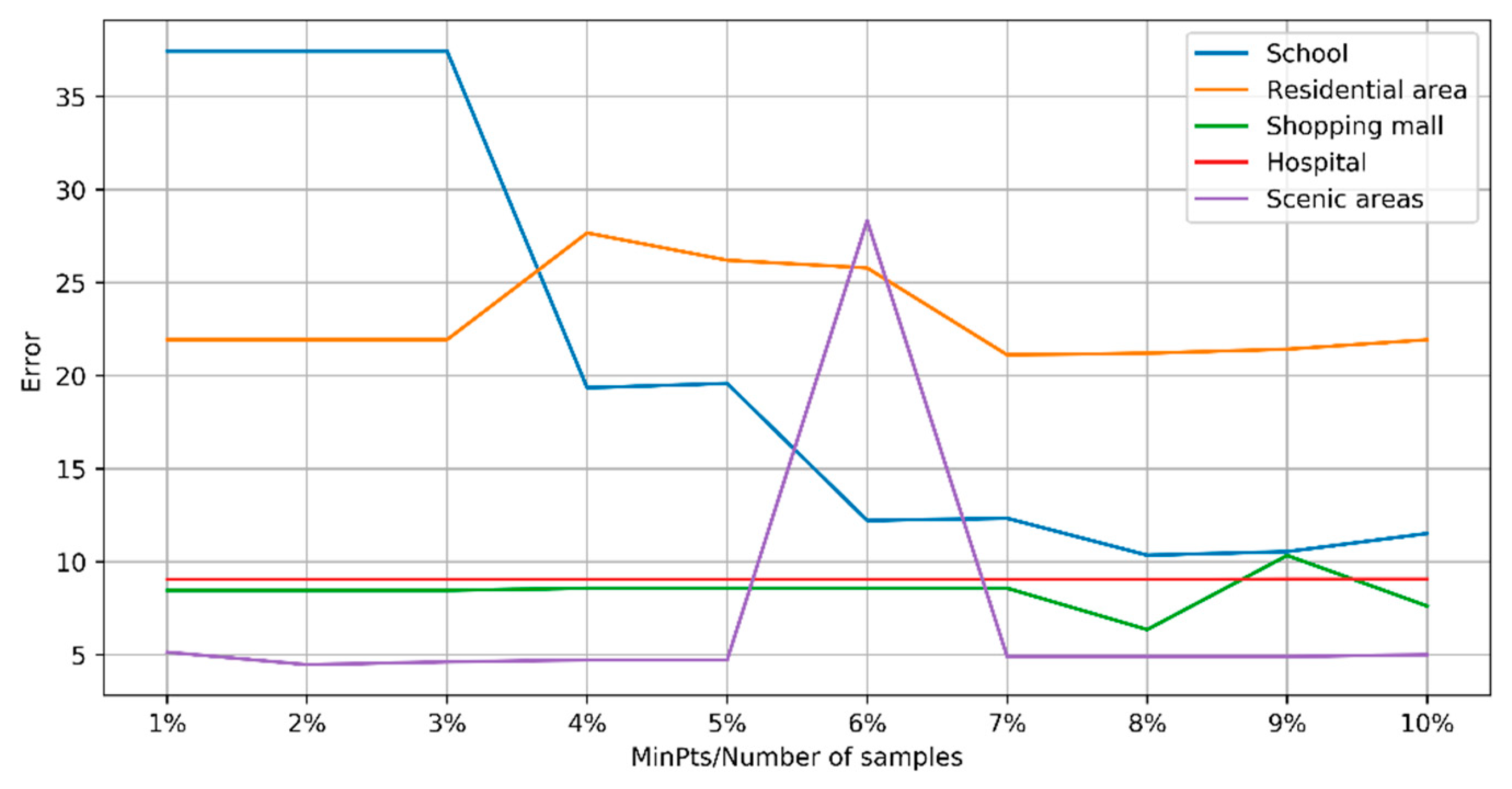
4.2. Parameter Setting of DBSCAN
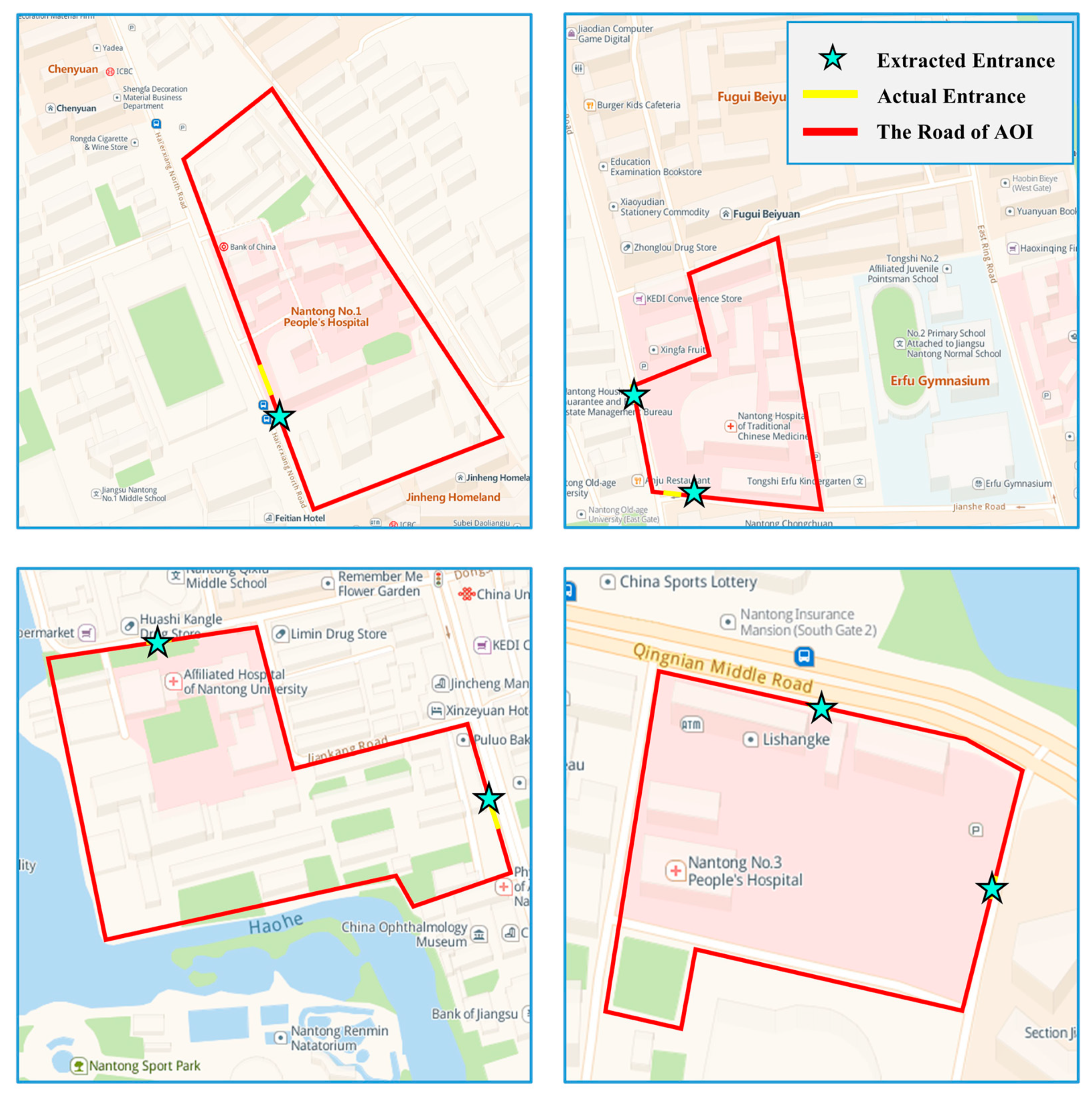
4.3. Accuracy of Extraction Results
4.4. Comparison with K-Means
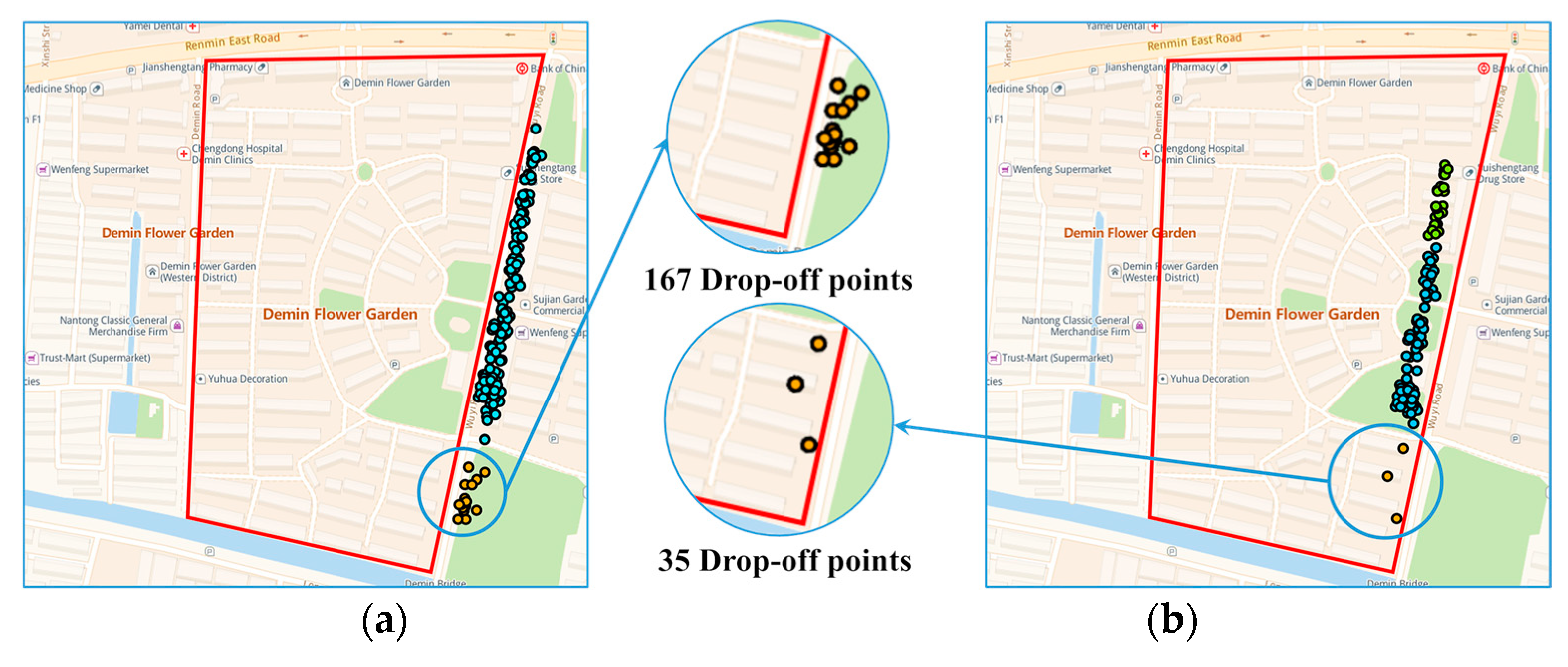
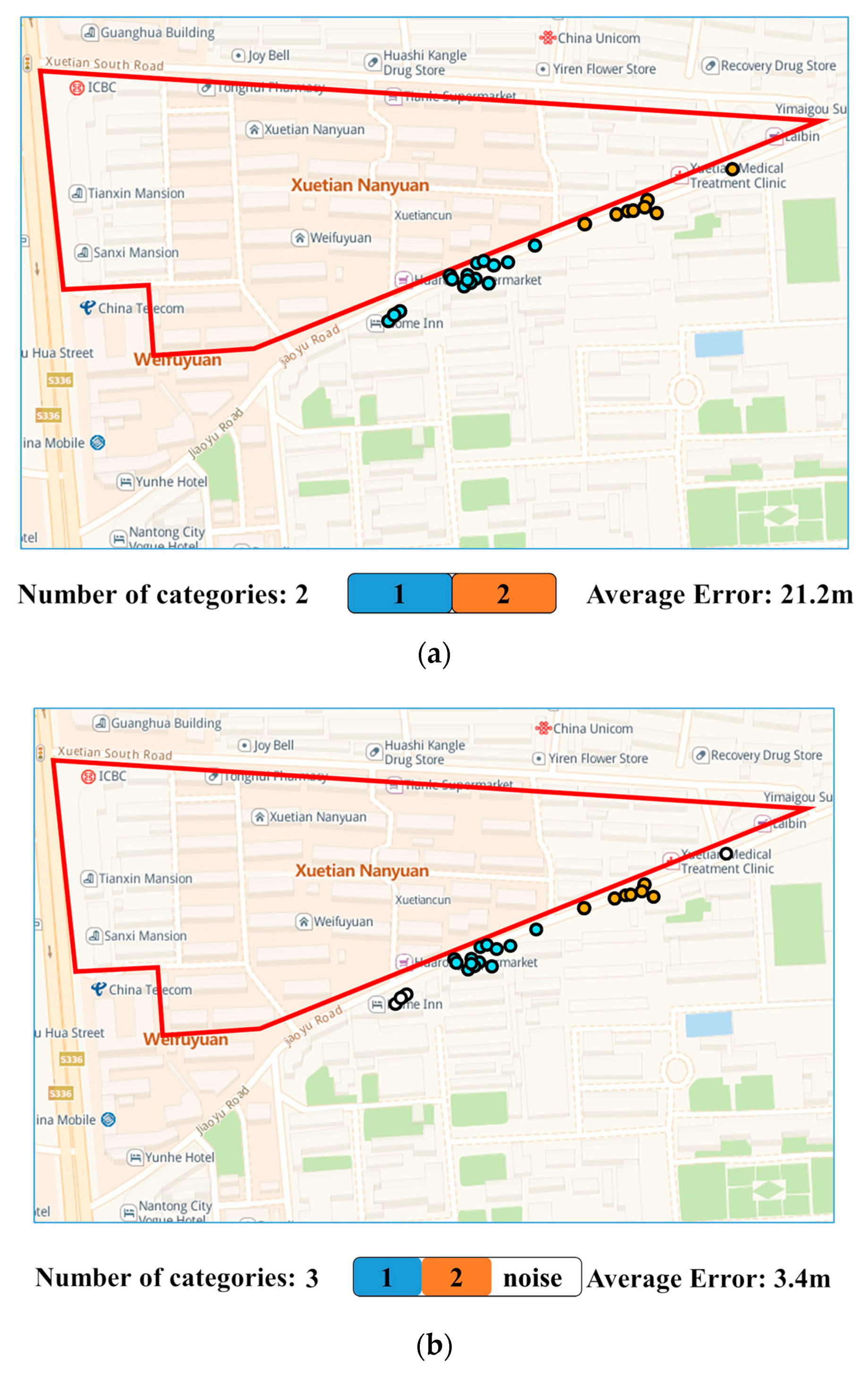
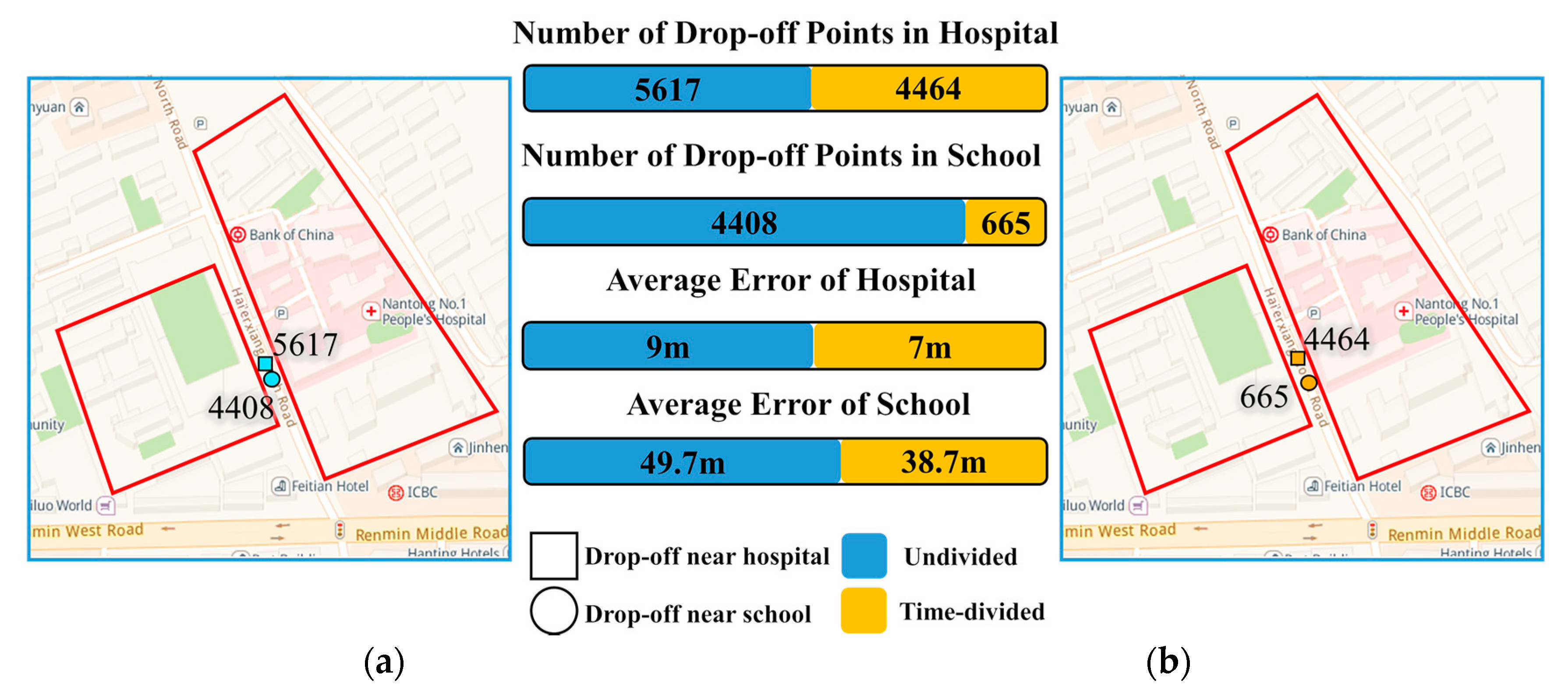
4.5. Processing of Special Case
5. Discussion
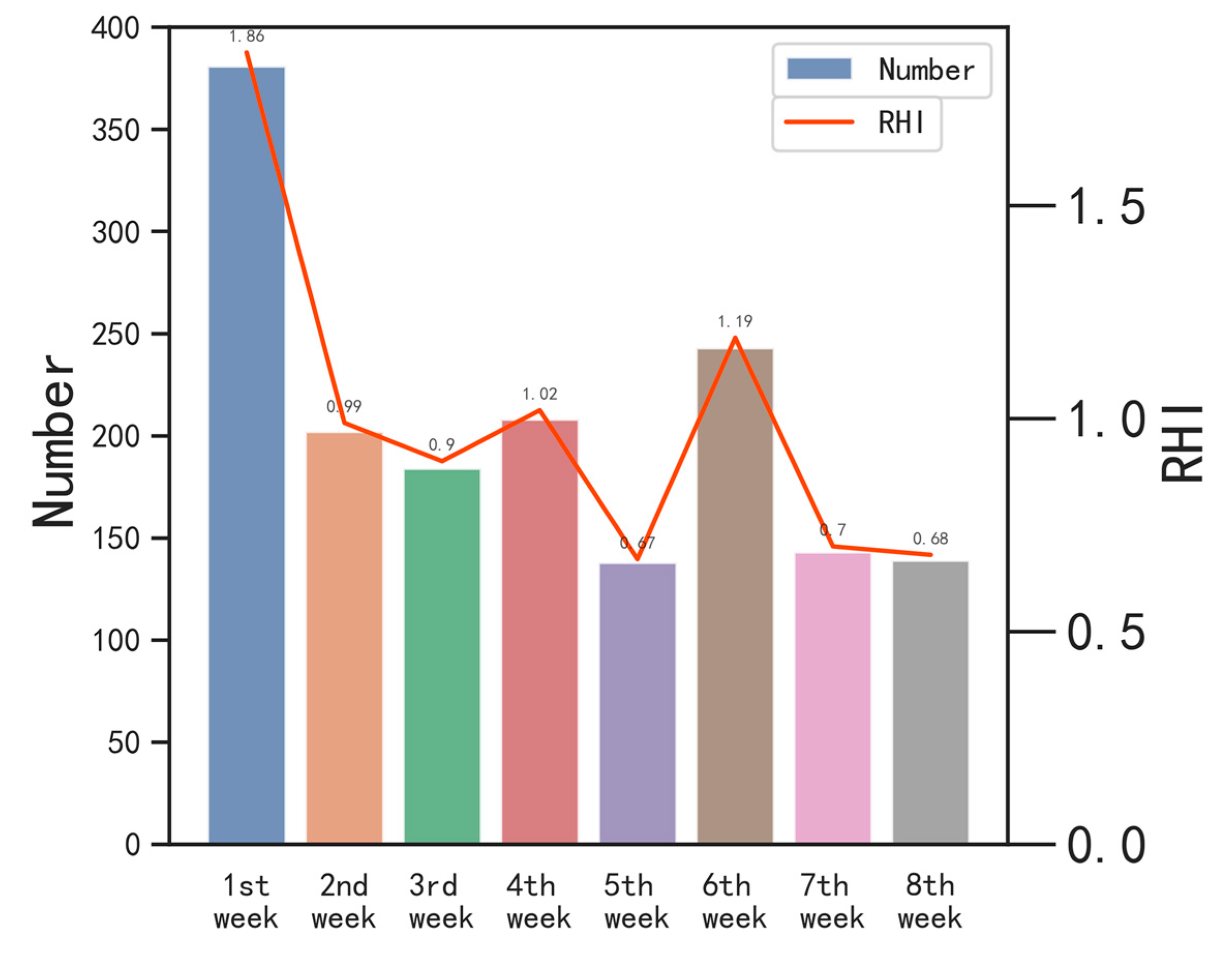
5.1. Application of Relative Hot Index
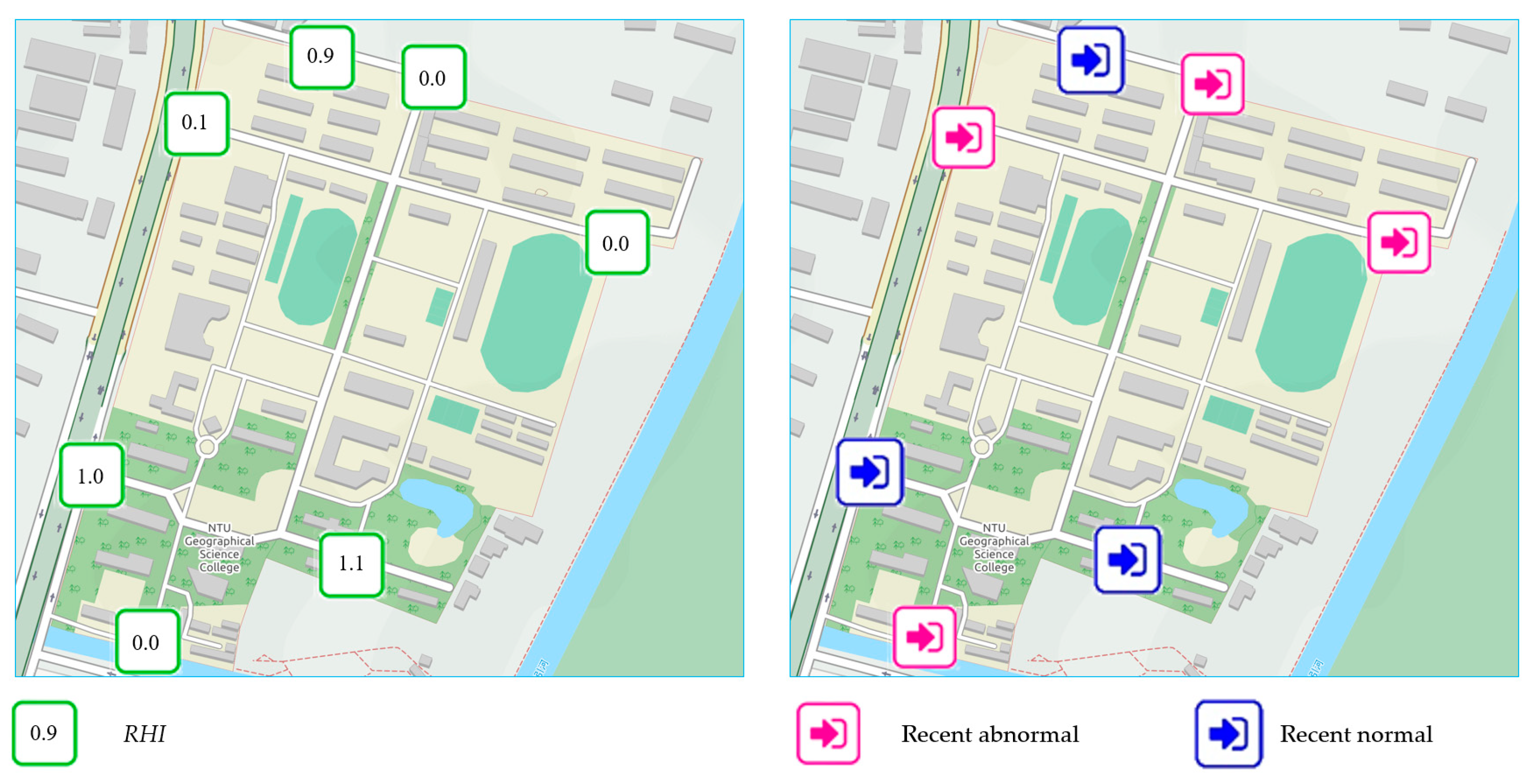
5.2. Detection of Changes in Entrance Status by
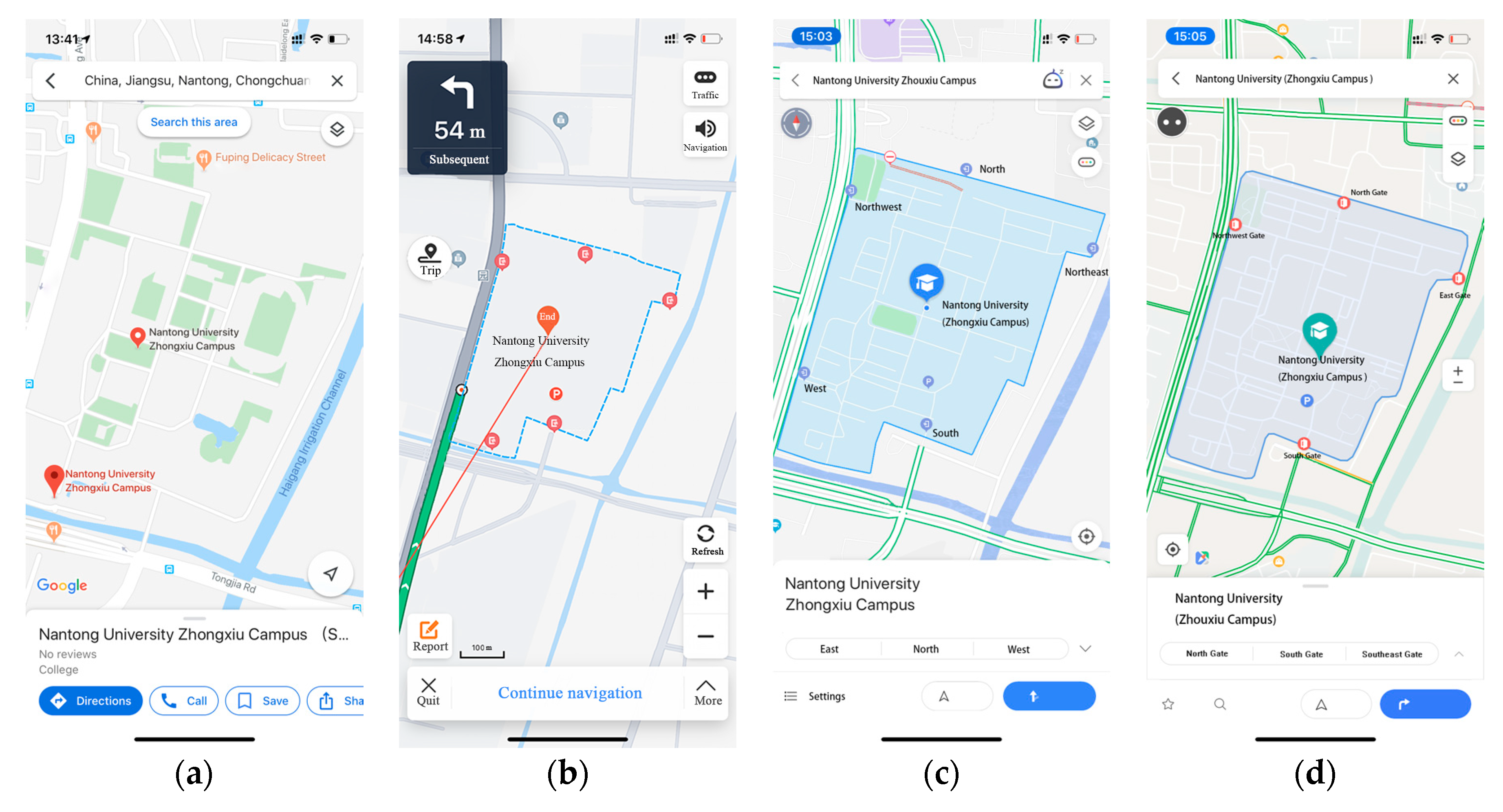
5.3. Aplication of the
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Talebi, M.; Vafaei, A.; Monadjemi, A. Vision-based entrance detection in outdoor scenes. Multimed. Tools Appl. 2018, 77, 26219–26238. [Google Scholar] [CrossRef]
- Liu, J.; Korah, T.; Hedau, V.; Parameswaran, V.; Grzeszczuk, R.; Liu, Y. Entrance detection from street-view images. In Proceedings of the IEEE International Conference on Computer Vision and Pattern Recognition Workshop (CVPR), Columbus, OH, USA, 24–27 June 2014; pp. 1–2. [Google Scholar]
- Zhang, Y.; Luo, H.; Skitmore, M.; Li, Q.; Zhong, B. Optimal Camera Placement for Monitoring Safety in Metro Station Construction Work. J. Constr. Eng. Manag. 2018, 145, 04018118. [Google Scholar] [CrossRef]
- Ding, L.; Fang, W.; Luo, H.; Love, P.E.; Zhong, B.; Ouyang, X. A deep hybrid learning model to detect unsafe behavior: Integrating convolution neural networks and long short-term memory. Autom. Constr. 2018, 86, 118–124. [Google Scholar] [CrossRef]
- Yue, Y.; Zhuang, Y.; Yeh, A.G.; Xie, J.Y.; Ma, C.L.; Li, Q.Q. Measurements of POI-based mixed use and their relationships with neighbourhood vibrancy. Int. J. Geogr. Inf. Sci. 2017, 31, 658–675. [Google Scholar] [CrossRef]
- Goodchild, M.F.; Li, L. Assuring the quality of volunteered geographic information. Spat. Stat. 2012, 1, 110–120. [Google Scholar] [CrossRef]
- Zhou, T.; Shi, W.; Liu, X.; Tao, F.; Qian, Z.; Zhang, R. A Novel Approach for Online Car-Hailing Monitoring Using Spatiotemporal Big Data. IEEE Access 2019, 7, 128936–128947. [Google Scholar] [CrossRef]
- Su, R.; Fang, Z.; Luo, N.; Zhu, J. Understanding the dynamics of the pick-up and drop-off locations of taxicabs in the context of a subsidy war among e-hailing apps. Sustainability 2018, 10, 1256. [Google Scholar] [CrossRef]
- Huang, L.; Wen, Y.; Ye, X.; Zhou, C.; Zhang, F.; Lee, J. Analysis of spatiotemporal trajectories for stops along taxi paths. Spat. Cogn. Comput. 2018, 18, 194–216. [Google Scholar] [CrossRef]
- Zheng, L.; Xia, D.; Zhao, X.; Tan, L.; Li, H.; Chen, L.; Liu, W. Spatial–temporal travel pattern mining using massive taxi trajectory data. Phys. A 2018, 501, 24–41. [Google Scholar] [CrossRef]
- Rossi, A.; Barlacchi, G.; Bianchini, M.; Lepri, B. Modelling Taxi Drivers’ Behaviour for the Next Destination Prediction. IEEE Trans. Intell. Transp. Syst. 2019, 1–10. [Google Scholar] [CrossRef]
- Brockmann, D.; Hufnagel, L.; Geisel, T. The scaling laws of human travel. Nature 2006, 439, 462–465. [Google Scholar] [CrossRef] [PubMed]
- Gonzalez, M.C.; Hidalgo, C.A.; Barabasi, A.L. Understanding individual human mobility patterns. Nature 2008, 453, 779–782. [Google Scholar] [CrossRef] [PubMed]
- Song, C.; Qu, Z.; Blumm, N.; Barabási, A.L. Limits of predictability in human mobility. Science 2010, 327, 1018–1021. [Google Scholar] [CrossRef] [PubMed]
- Liang, X.; Zheng, X.; Lv, W.; Zhu, T.; Xu, K. The scaling of human mobility by taxis is exponential. Phys. A 2012, 391, 2135–2144. [Google Scholar] [CrossRef]
- Guerra, C.A.; Kang, S.Y.; Citron, D.T.; Hergott, D.E.B.; Perry, M.; Smith, J.; Phiri, W.P.; Osa Nfumu, J.O.; Mba Eyono, J.N.; Battle, K.E.; et al. Human mobility patterns and malaria importation on Bioko Island. Nat. Commun. 2019, 10, 2332. [Google Scholar] [CrossRef] [PubMed]
- Jasny, B.R.; Stone, R. Prediction and its limits. Science 2017, 355, 468–469. [Google Scholar] [CrossRef][Green Version]
- Zhong, R.; Luo, J.; Cai, H.; Sumalee, A.; Yuan, F.; Chow, A.H. Forecasting journey time distribution with consideration to abnormal traffic conditions. Transp. Res. C Emerg. Technol. 2017, 85, 292–311. [Google Scholar] [CrossRef]
- Jiang, S.; Guan, W.; He, Z.; Yang, L. Measuring Taxi Accessibility Using Grid-Based Method with Trajectory Data. Sustainability 2018, 10, 3187. [Google Scholar] [CrossRef]
- Chen, C.; Jiao, S.; Zhang, S.; Liu, W.; Feng, L.; Wang, Y. TripImputor: Real-time imputing taxi trip purpose leveraging multi-sourced urban data. IEEE Trans. Intell. Transp. Syst. 2018, 19, 3292–3304. [Google Scholar] [CrossRef]
- Liu, X.; Gong, L.; Gong, Y.; Liu, Y. Revealing travel patterns and city structure with taxi trip data. J. Transp. Geogr. 2015, 43, 78–90. [Google Scholar] [CrossRef]
- Yang, Z.; Franz, M.L.; Zhu, S.; Mahmoudi, J.; Nasri, A.; Zhang, L. Analysis of Washington, DC taxi demand using GPS and land-use data. J. Transp. Geogr. 2018, 66, 35–44. [Google Scholar] [CrossRef]
- Yue, Y.; Wang, H.D.; Hu, B.; Li, Q.Q.; Li, Y.G.; Yeh, A.G. Exploratory calibration of a spatial interaction model using taxi GPS trajectories. Comput. Environ. Urban Syst. 2012, 36, 140–153. [Google Scholar] [CrossRef]
- Tang, L.; Zhao, Y.; Cabrera, J.; Ma, J.; Tsui, K.L. Forecasting Short-Term Passenger Flow: An Empirical Study on Shenzhen Metro. IEEE Trans. Intell. Transp. Syst. 2018, 20, 3613–3622. [Google Scholar] [CrossRef]
- Zhao, P.; Liu, X.; Shen, J.; Chen, M. A network distance and graph-partitioning-based clustering method for improving the accuracy of urban hotspot detection. GeoIn 2017, 34, 293–315. [Google Scholar] [CrossRef]
- Tang, L.; Kan, Z.; Zhang, X.; Sun, F.; Yang, X.; Li, Q. A network Kernel Density Estimation for linear features in space–time analysis of big trace data. Int. J. Geogr. Inf. Sci. 2015, 30, 1717–1737. [Google Scholar] [CrossRef]
- Parzen, E. On estimation of a probability density function and mode. Ann. Math. Stat. 1962, 33, 1065–1076. [Google Scholar] [CrossRef]
- Getis, A.; Ord, J.K. The analysis of spatial association by use of distance statistics. In Perspectives on Spatial Data Analysis; Springer: Berlin/Heidelberg, Germany, 2010; pp. 127–145. [Google Scholar]
- Ord, J.K.; Getis, A. Local spatial autocorrelation statistics: Distributional issues and an application. Geogr. Anal. 1995, 27, 286–306. [Google Scholar] [CrossRef]
- Deng, M.; Yang, X.; Shi, Y.; Gong, J.; Liu, Y.; Liu, H. A density-based approach for detecting network-constrained clusters in spatial point events. Int. J. Geogr. Inf. Sci. 2018, 33, 466–488. [Google Scholar] [CrossRef]
- Hu, C.; Thill, J.C. Predicting the Upcoming Services of Vacant Taxis near Fixed Locations Using Taxi Trajectories. ISPRS Int. J. Geo-Inf. 2019, 8, 295. [Google Scholar] [CrossRef]
- Shen, J.; Liu, X.; Chen, M. Discovering spatial and temporal patterns from taxi-based Floating Car Data: A case study from Nanjing. GISci. Remote Sens. 2017, 54, 617–638. [Google Scholar] [CrossRef]
- Hartigan, J.A.; Wong, M.A. Algorithm AS 136: A k-means clustering algorithm. J. R. Stat. Soc. Ser. C Appl. Stat. 1979, 28, 100–108. [Google Scholar] [CrossRef]
- Ester, M.; Kriegel, H.P.; Sander, J.; Xu, X. A Density-Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise. In Kdd; AAAI Press: Portland, OR, USA, 1996. [Google Scholar]
- Tang, J.; Liu, F.; Wang, Y.; Wang, H. Uncovering urban human mobility from large scale taxi GPS data. Phys. A 2015, 438, 140–153. [Google Scholar] [CrossRef]
- Zhou, S.; Zhai, G.; Shi, Y. What Drives the Rise of Metro Developments in China? Evidence from Nantong. Sustainability 2018, 10, 2931. [Google Scholar] [CrossRef]
- Hu, Y.; Gao, S.; Janowicz, K.; Yu, B.; Li, W.; Prasad, S. Extracting and understanding urban areas of interest using geotagged photos. Computers. Environ. Urban Syst. 2015, 54, 240–254. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| License Plate Number | Phone Number | Time | Latitude and Longitude (°) | Speed (km/h) | Direction | Passenger Status |
|---|---|---|---|---|---|---|
| Su F*78 | 139****3474 | 2018/10/2 | 120.847863 | 42.6 | positive south | 0 |
| 0:00:00 | 32.021630 | |||||
| Su F*78 | 139****3474 | 2018/10/2 | 120.849143 | 41.9 | positive south | 0 |
| 0:00:30 | 32.018836 | |||||
| Su F*78 | 139****3474 | 2018/10/2 | 120.849881 | 0 | positive south | 0 |
| 0:01:00 | 32.017181 | |||||
| … | … | … | … | … | … | … |
| Su F*78 | 139****3474 | 2018/10/3 | 120.886796 | 26.9 | positive south | 1 |
| 23:59:00 | 31.987893 | |||||
| Su F*78 | 139****3474 | 2018/10/3 | 120.887567 | 53.8 | positive south | 1 |
| 23:59:30 | 31.984338 |
| Type of AOI | Number of AOI | AOI Name | Area (km2) | Number of Drop-Off Points |
|---|---|---|---|---|
| Shopping mall | 13 | Outlets Shopping Square | 0.049 | 200 |
| Gold Coast International Square | 0.072 | 479 | ||
| Hongming Mall | 0.063 | 489 | ||
| … | … | … | ||
| Darunfa Supermarket | 0.103 | 457 | ||
| Zhongnan Shopping Mall | 0.057 | 3464 | ||
| Scenic area | 5 | Nantong Exploration Kingdom | 0.397 | 1759 |
| Haohe Museum | 0.026 | 909 | ||
| Nantong Museum | 0.094 | 422 | ||
| Sports Park | 0.073 | 3777 | ||
| The Undersea World | 0.432 | 548 | ||
| Residential area | 13 | The north Community | 0.027 | 171 |
| Beiguo Community | 0.096 | 313 | ||
| Demin Garden | 0.247 | 1198 | ||
| … | … | … | ||
| Chunhui Garden | 0.321 | 1535 | ||
| Zhongnan Century Garden | 0.259 | 732 | ||
| School | 7 | Nantong No.1 Middle School | 0.031 | 4408 |
| Qixiu campus of Nantong University | 0.201 | 169 | ||
| Nantong Vocational University | 0.175 | 1436 | ||
| … | … | … | ||
| Nantong Technical College | 0.229 | 1997 | ||
| Nantong Technical Vocational College | 0.261 | 1375 | ||
| Hospital | 5 | Nantong No.1 People’s Hospital | 0.042 | 5438 |
| Nantong Hospital of Traditional Chinese Medicine | 0.025 | 1427 | ||
| Affiliated Hospital of Nantong University | 0.095 | 10784 | ||
| Nantong No.3 People’s Hospital | 0.074 | 5919 | ||
| Great Wall Hospital of Nantong | 0.007 | 688 |
| Type of AOI | Eps (m) | MinPts (%) |
|---|---|---|
| School | 33 | 8 |
| Hospital | 66 | 8 |
| Scenic areas | 35 | 2 |
| Shopping mall | 29 | 8 |
| Residential area | 64 | 7 |
| ID | Shopping Mall | Scenic Area | Residential Area | School | Hospital | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| Error (m) | Area (km2) | Error (m) | Area (km2) | Error (m) | Area (km2) | Error (m) | Area (km2) | Error (m) | Area (km2) | |
| 1 | 0.0 | 0.049 | 0.0 | 0.397 | 3.3 | 0.027 | 49.7 | 0.031 | 8.8 | 0.042 |
| 2 | 0.0 | 0.049 | 2.0 | 0.026 | 6.5 | 0.096 | 12.9 | 0.201 | 0.0 | 0.025 |
| 3 | 13.3 | 0.072 | 11.9 | 0.094 | 2.2 | 0.247 | 4.3 | 0.175 | 8.3 | 0.025 |
| 4 | 0.0 | 0.072 | 2.5 | 0.094 | 135.3 | 0.114 | 0.0 | 0.175 | 3.8 | 0.095 |
| 5 | 0.0 | 0.063 | 10.4 | 0.073 | 11 | 0.114 | 0.0 | 0.419 | 3.4 | 0.095 |
| 6 | 5.5 | 0.063 | 0.0 | 0.432 | 16.7 | 0.114 | 0.0 | 1.793 | 42.6 | 0.074 |
| 7 | 2.2 | 0.088 | / | / | 17.4 | 0.212 | 1.3 | 1.793 | 0.0 | 0.074 |
| 8 | 36.4 | 0.088 | / | / | 24.8 | 0.594 | 0 | 1.793 | 5.3 | 0.007 |
| 9 | 0.0 | 0.088 | / | / | 28 | 0.049 | 22.3 | 0.103 | / | / |
| 10 | 5.8 | 0.043 | / | / | 21.1 | 0.119 | 13.4 | 0.229 | / | / |
| 11 | 10.9 | 0.046 | / | / | 39.6 | 0.119 | 3.2 | 0.229 | / | / |
| 12 | 0.0 | 0.046 | / | / | 9.5 | 0.201 | 17.1 | 0.261 | / | / |
| 13 | 12.8 | 0.031 | / | / | 10.0 | 0.354 | / | / | / | / |
| 14 | 1.2 | 0.348 | / | / | 31.1 | 0.354 | / | / | / | / |
| 15 | 6.4 | 0.019 | / | / | 21.8 | 0.181 | / | / | / | / |
| 16 | 7.5 | 0.016 | / | / | 0 | 0.321 | / | / | / | / |
| 17 | 0.0 | 0.055 | / | / | 1.8 | 0.259 | / | / | / | / |
| 18 | 1.7 | 0.103 | / | / | 0 | 0.259 | / | / | / | / |
| 19 | 11.0 | 0.057 | / | / | / | / | / | / | / | / |
| 20 | 12.4 | 0.057 | / | / | / | / | / | / | / | / |
| of Elbow Method | of Silhouette Coefficient | Error of Elbow Method (m) | Error of Silhouette Coefficient (m) | The Best | Minimum Error (m) | |
|---|---|---|---|---|---|---|
| Outlets Shopping Plaza | 2 | 9 | 4.7 | 6.7 | 2 | 4.7 |
| Nantong Museum | 2 | 2 | 2.6 | 2.6 | 2 | 2.6 |
| De min Garden | 2 | 4 | 86.5 | 55.7 | 4 | 55.7 |
| … | … | … | … | … | … | … |
| Nantong Vocational University | 2 | 4 | 14.2 | 35.5 | 2 | 14.2 |
| Nantong Hospital of Traditional Chinese Medicine | 2 | 2 | 23 | 23 | 2 | 23 |
| Type | Error (m) | |
|---|---|---|
| DBSCANCRN | K-MEANS | |
| School | 10.4 | 10.4 |
| Hospital | 9.0 | 22.6 |
| Scenic areas | 4.5 | 4.6 |
| Shopping mall | 6.4 | 11.9 |
| Residential area | 21.1 | 29.9 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, T.; Liu, X.; Qian, Z.; Chen, H.; Tao, F. Dynamic Update and Monitoring of AOI Entrance via Spatiotemporal Clustering of Drop-Off Points. Sustainability 2019, 11, 6870. https://doi.org/10.3390/su11236870
Zhou T, Liu X, Qian Z, Chen H, Tao F. Dynamic Update and Monitoring of AOI Entrance via Spatiotemporal Clustering of Drop-Off Points. Sustainability. 2019; 11(23):6870. https://doi.org/10.3390/su11236870
Chicago/Turabian StyleZhou, Tong, Xintao Liu, Zhen Qian, Haoxuan Chen, and Fei Tao. 2019. "Dynamic Update and Monitoring of AOI Entrance via Spatiotemporal Clustering of Drop-Off Points" Sustainability 11, no. 23: 6870. https://doi.org/10.3390/su11236870
APA StyleZhou, T., Liu, X., Qian, Z., Chen, H., & Tao, F. (2019). Dynamic Update and Monitoring of AOI Entrance via Spatiotemporal Clustering of Drop-Off Points. Sustainability, 11(23), 6870. https://doi.org/10.3390/su11236870