A Dynamic Traffic Assignment Model for the Sustainability of Pavement Performance

Abstract
:1. Introduction
2. Methodology
2.1. General
2.2. Pavement Deterioration Model
2.3. Multi-objective DTA Model with Pavement Performance Consideration
2.4. Model Solution
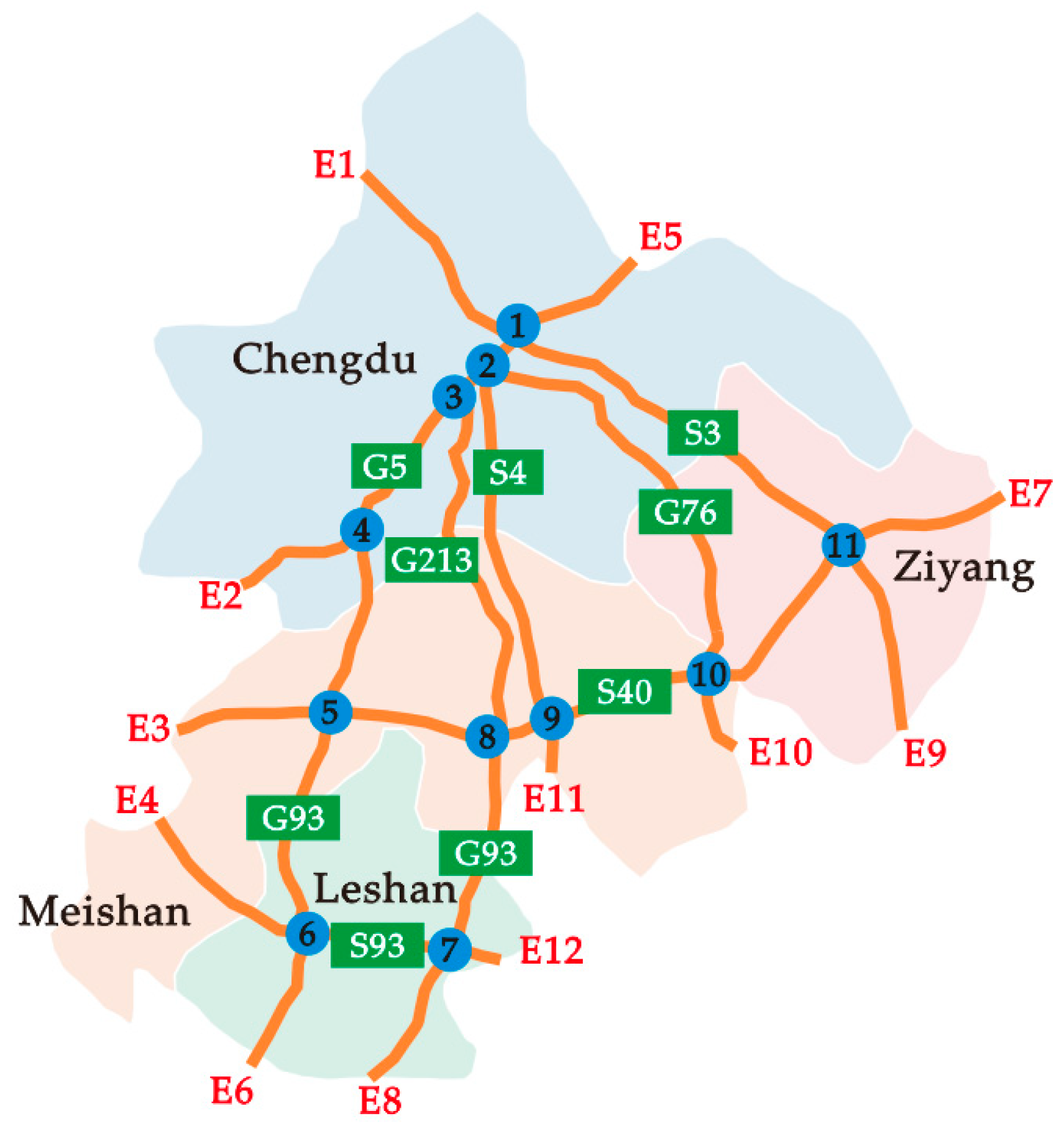
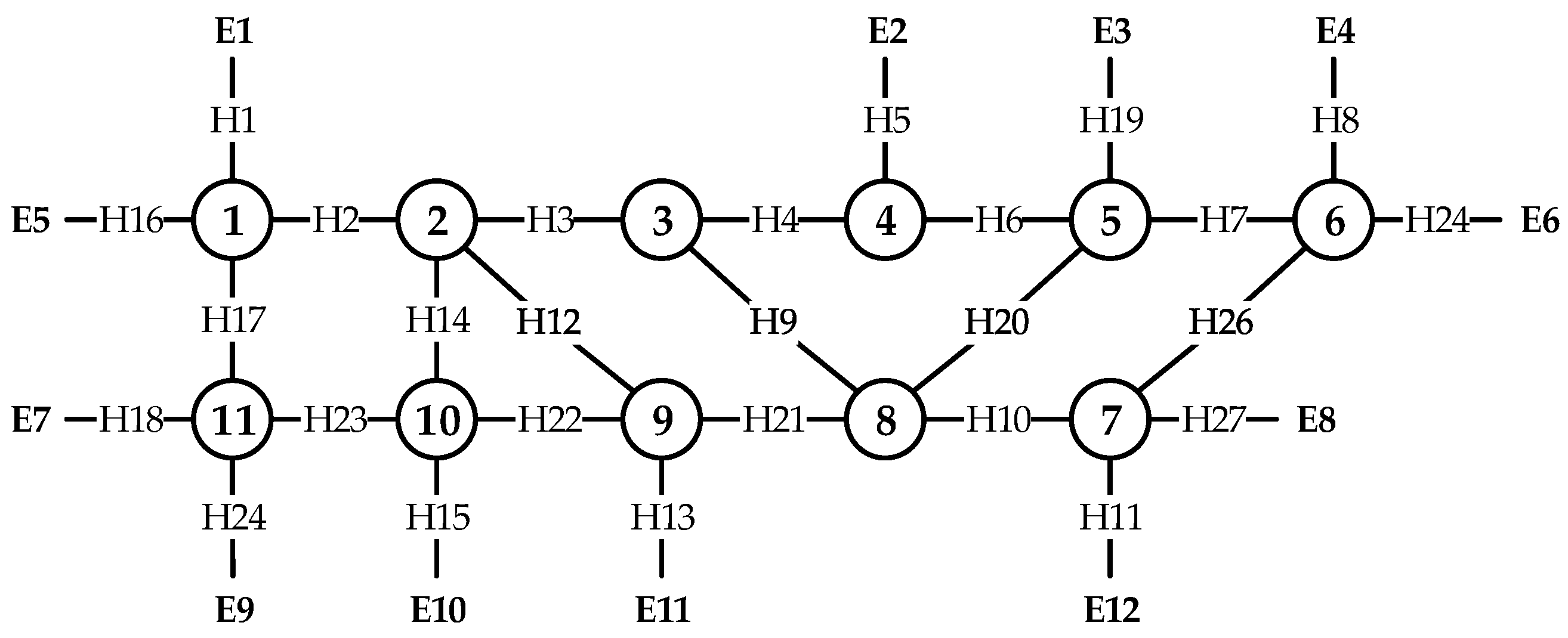
3. Case Study
3.1. Data Collection and Processing
3.1.1. Basic Data
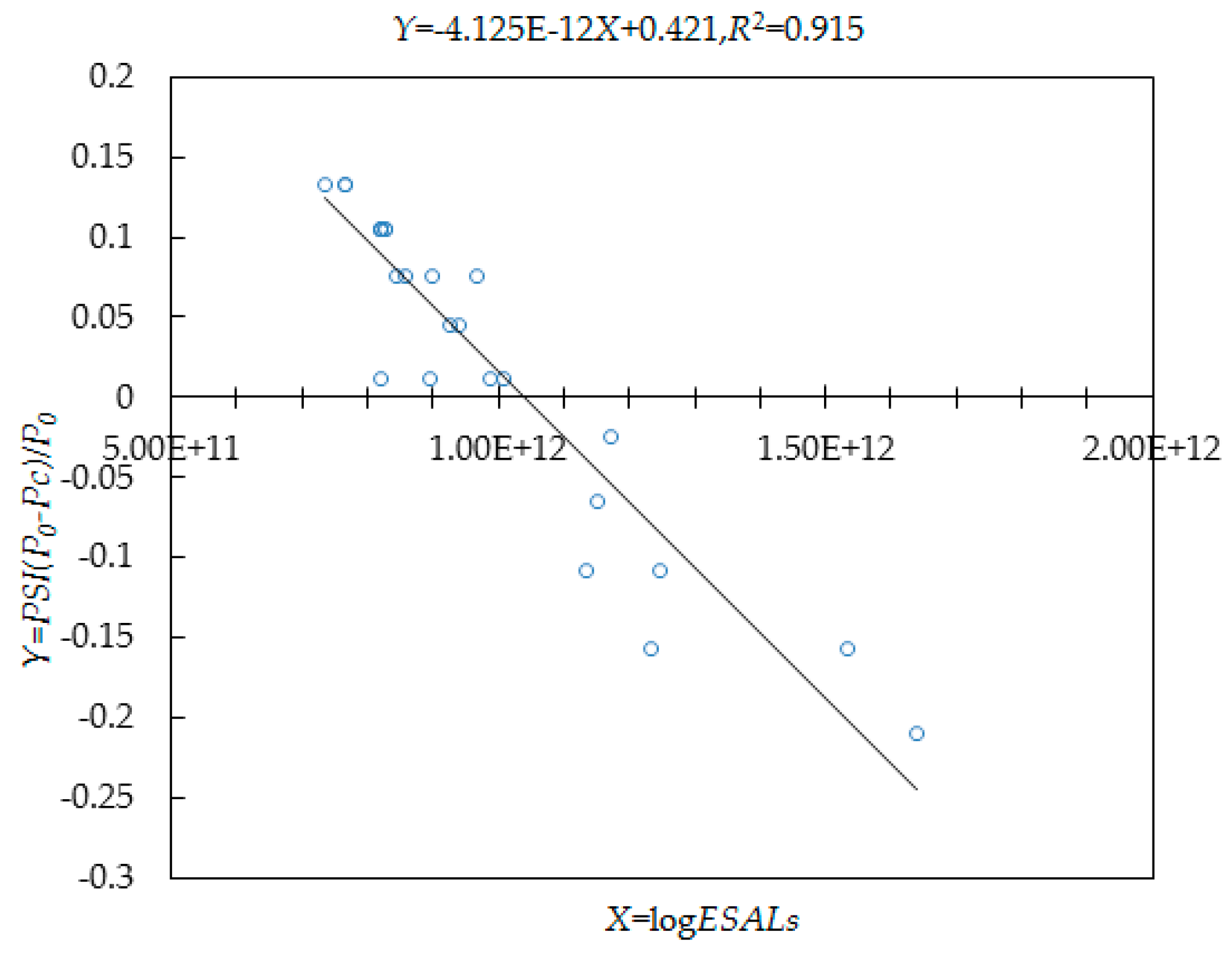
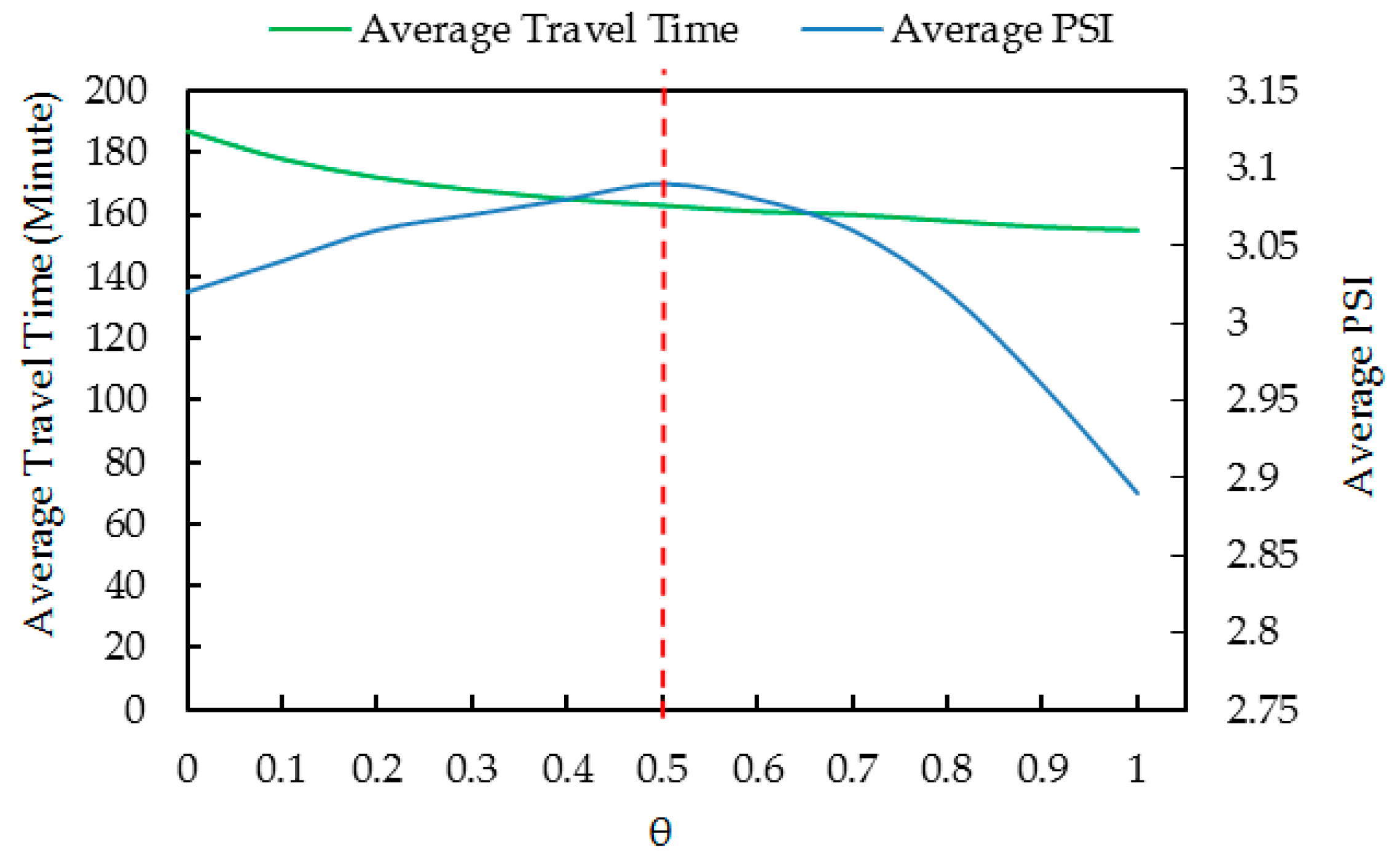
3.1.2. Parameter Calibration
3.2. Results
3.2.1. Distribution of Traffic Flow
3.2.2. Maintenance Expenditures
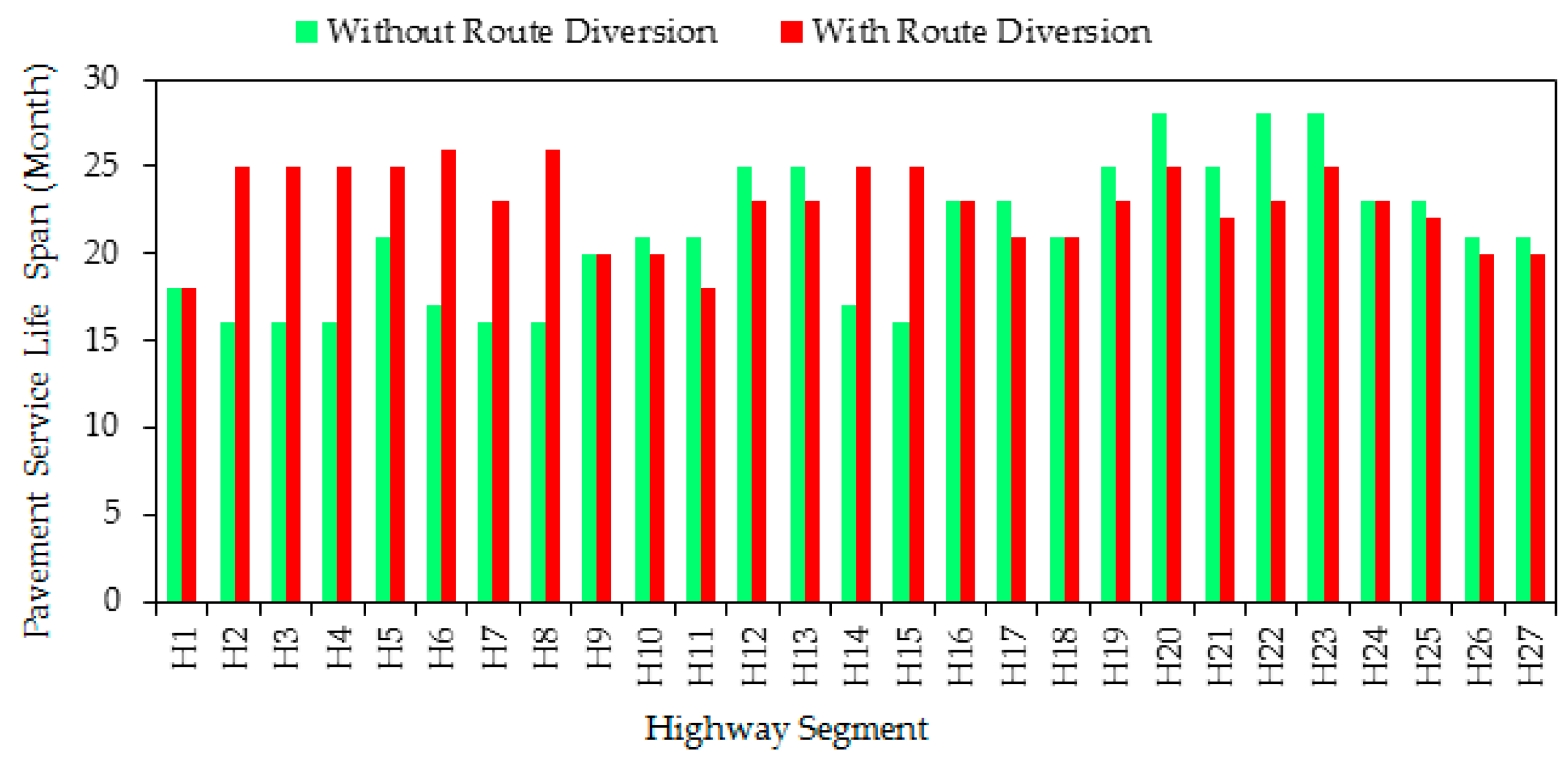
3.2.3. Pavement Service Life Span
3.2.4. Average Travel Time
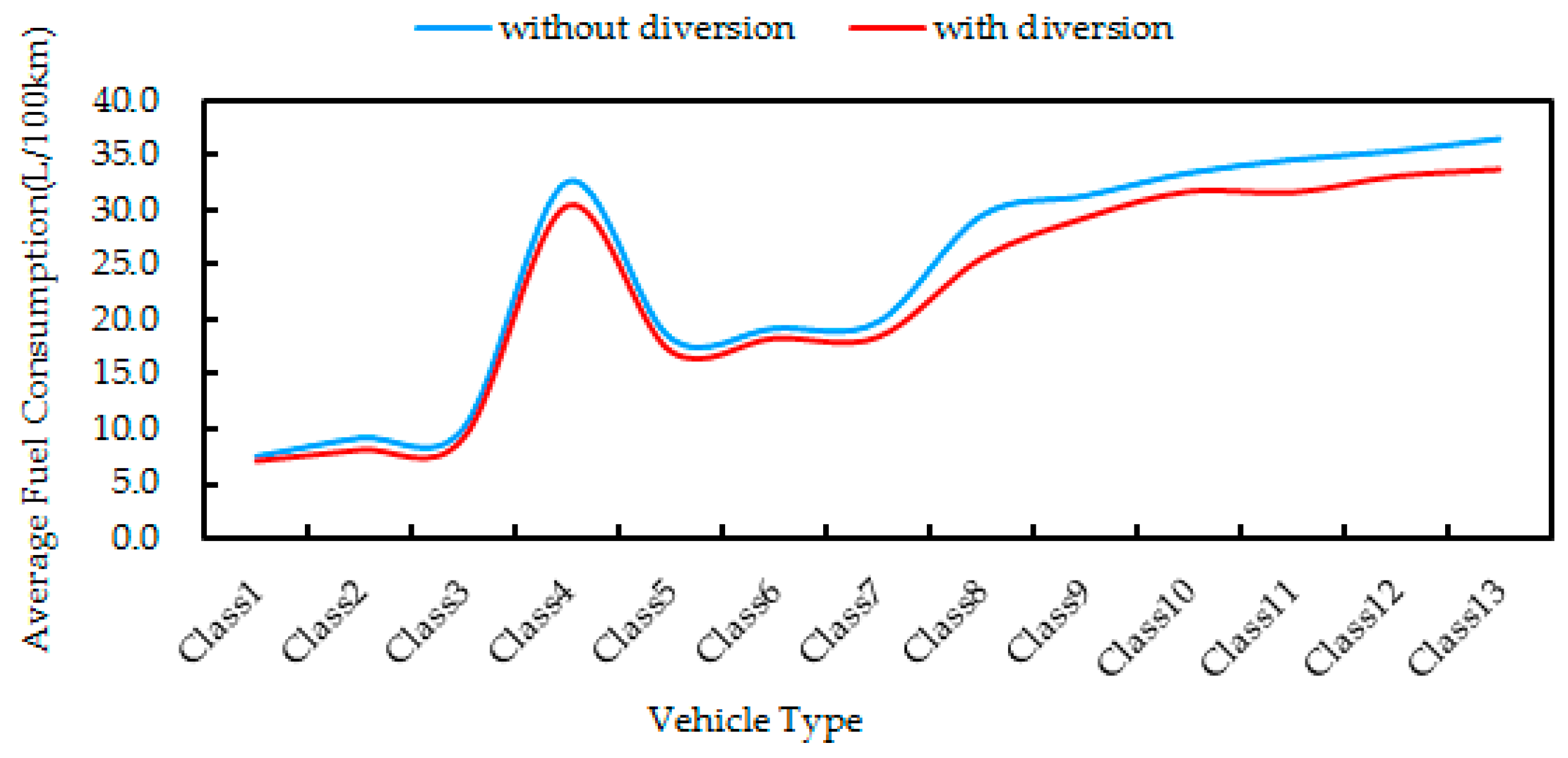
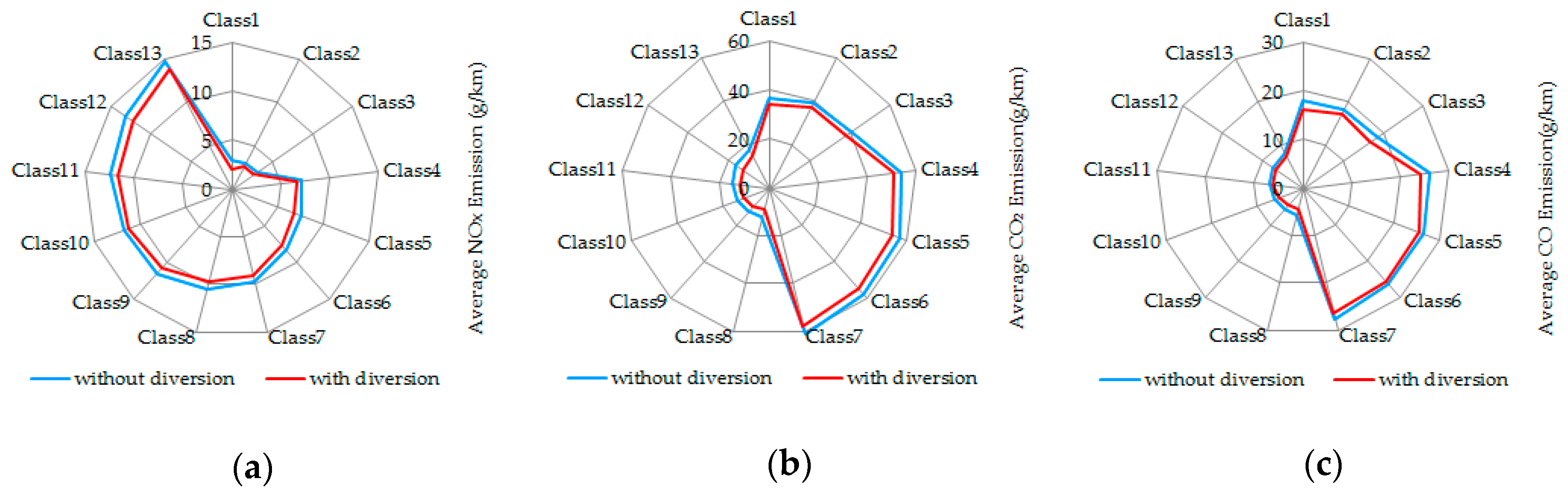
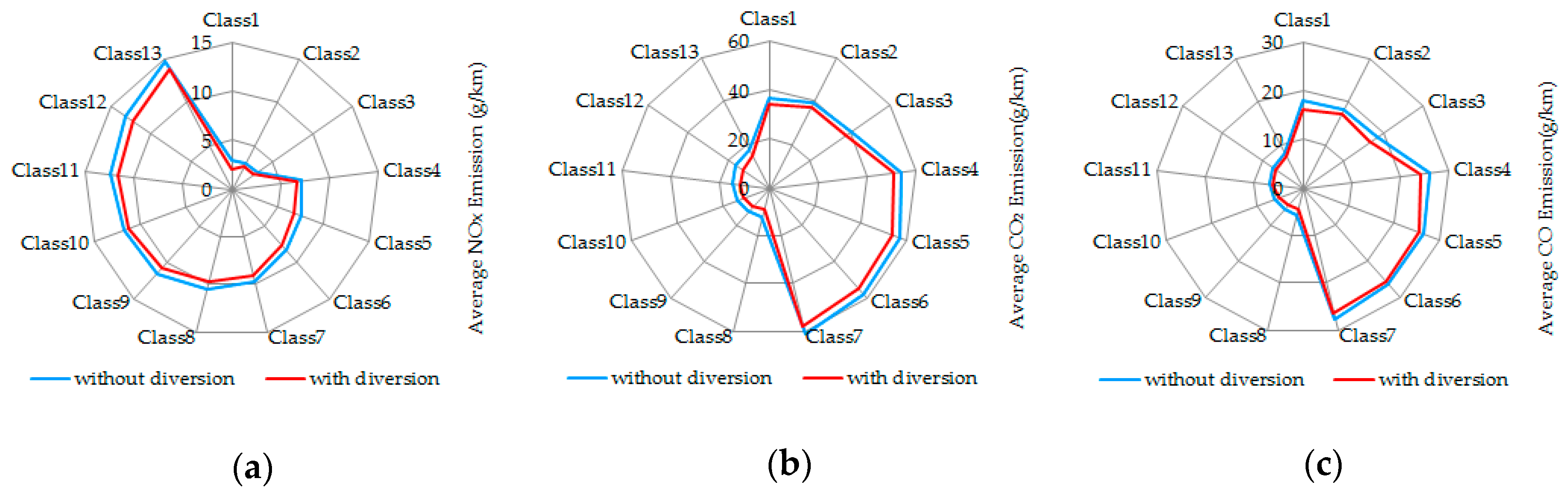
3.2.5. Fuel Consumption and Pollutant Emissions
4. Discussion
5. Conclusions
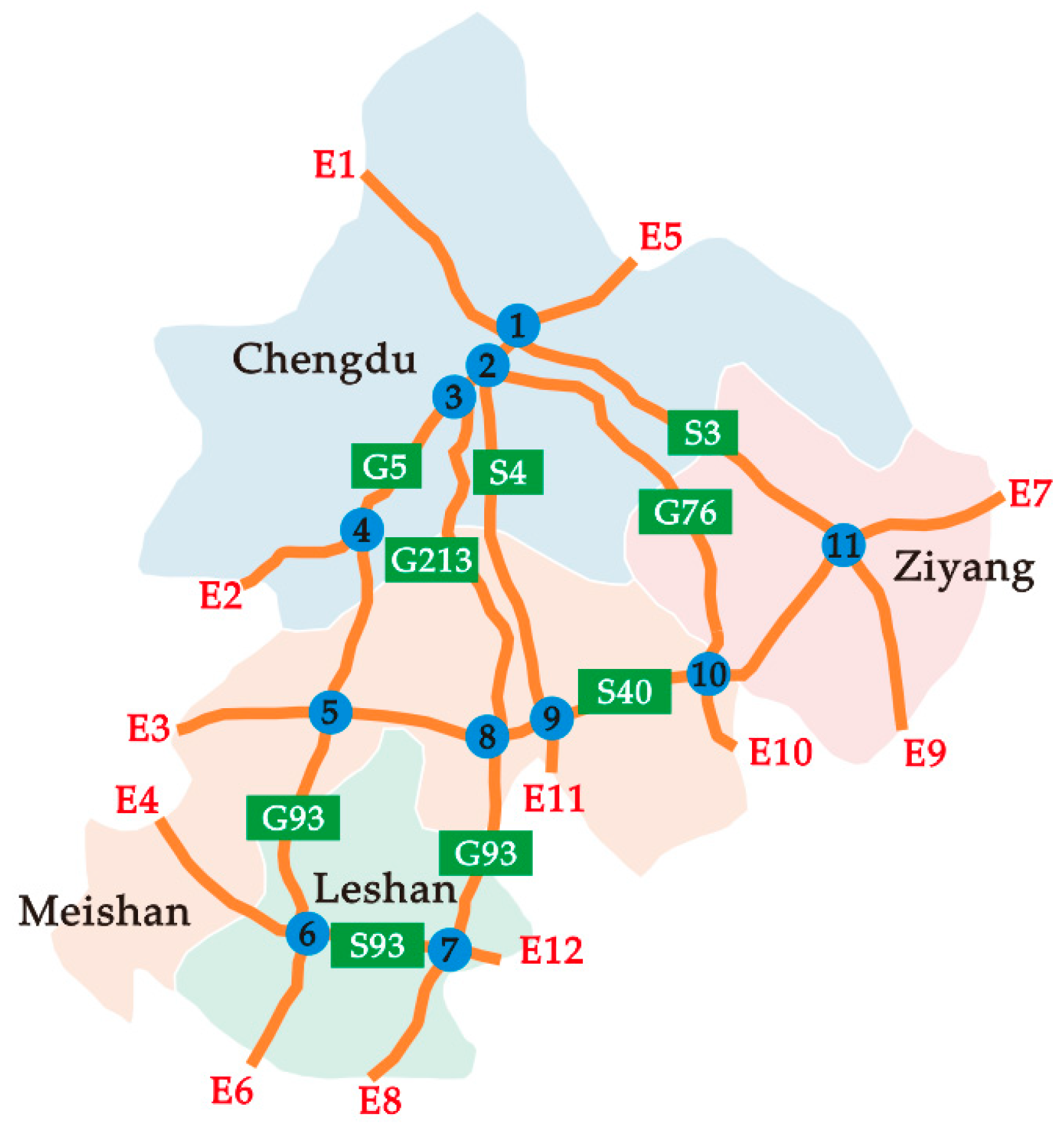
- Vehicles of class 5 to 11 are the main factors of pavement damage. To slow down PSI declining rate, an average of about 17.67% vehicles diverts their routes from G5, G93 and G76 to the adjoining highways, and vehicles of class 5, 8, 9, 10 account for about 75% of all diverting vehicles on both directions.
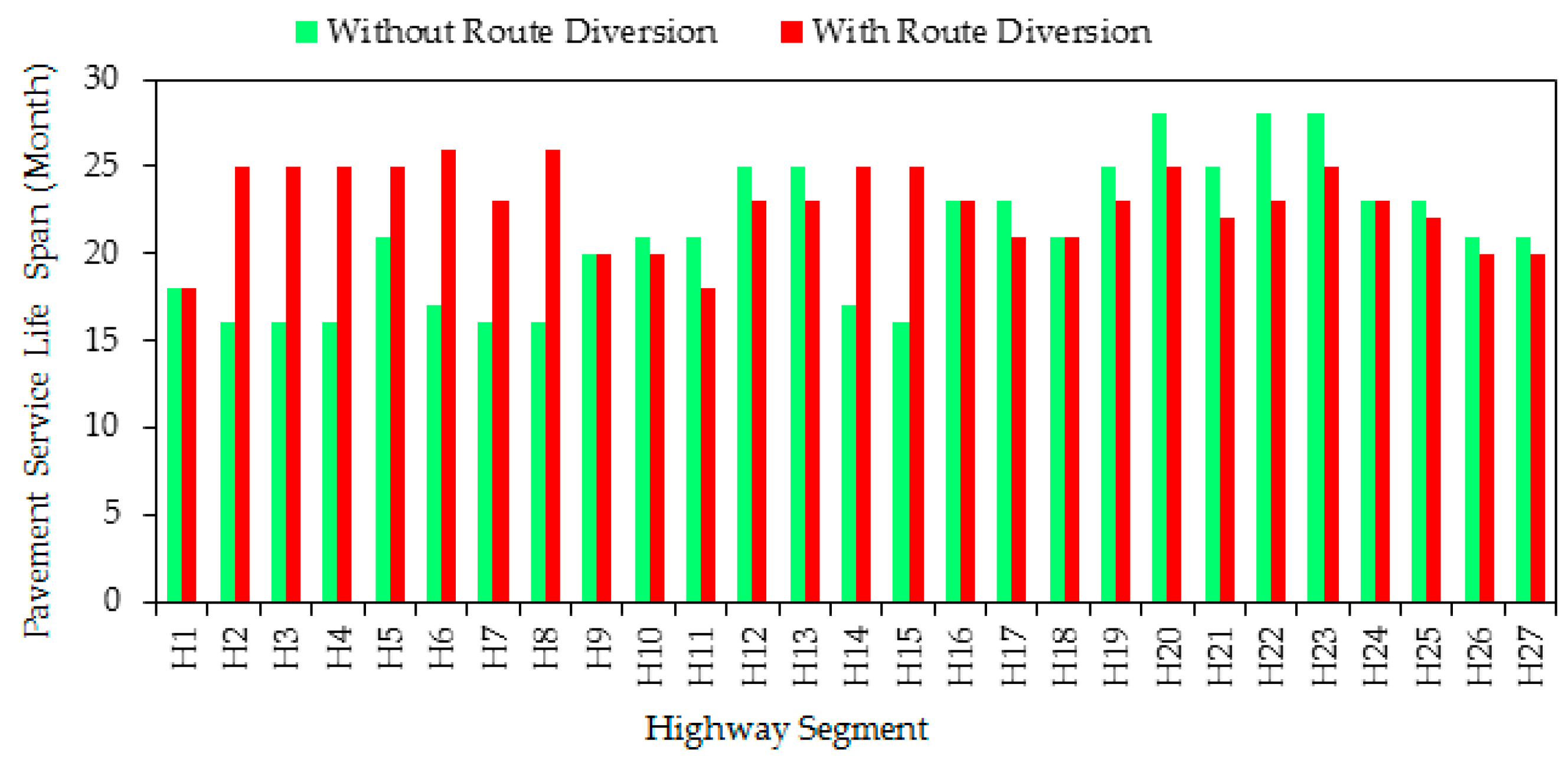
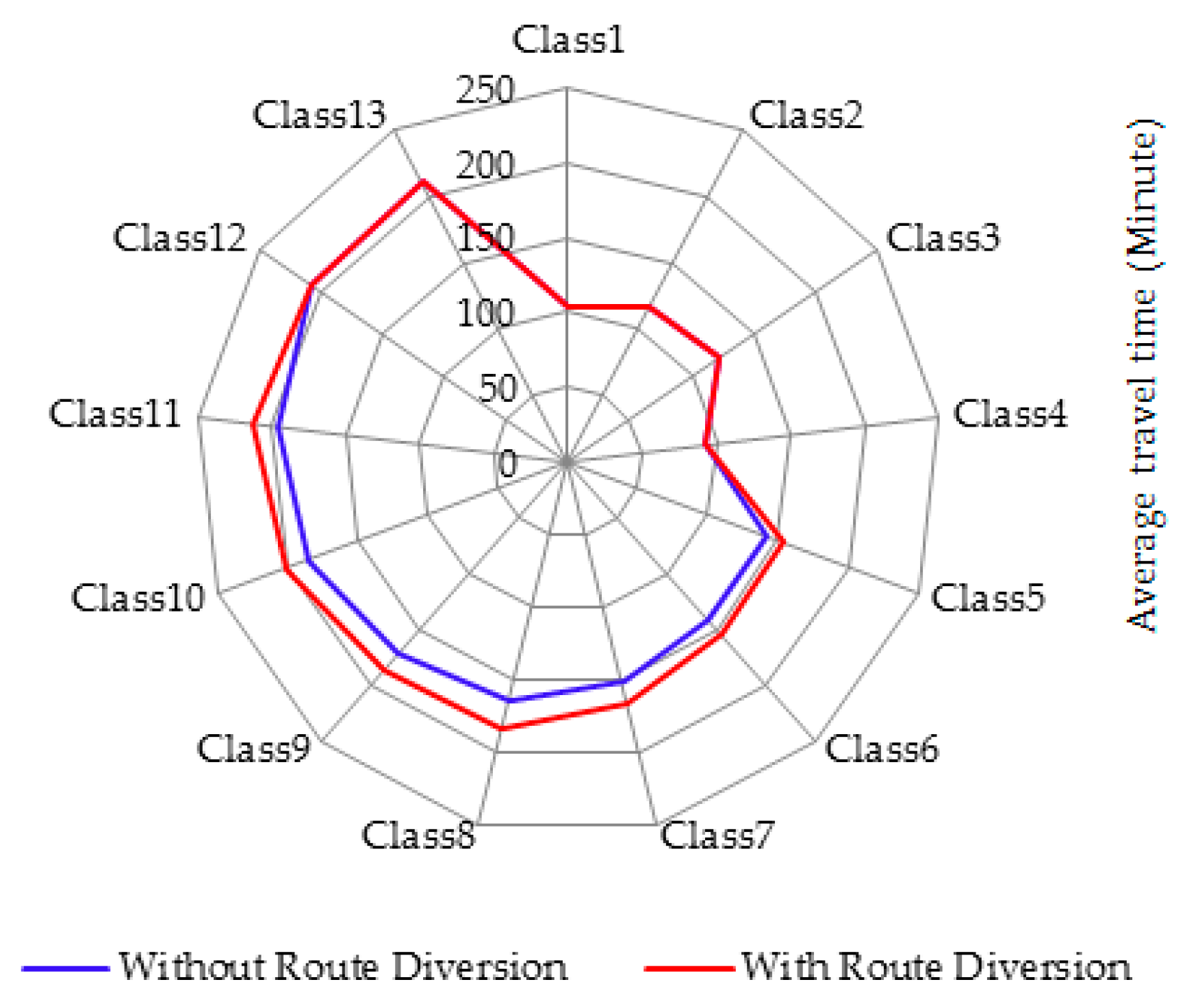
- The optimal traffic assignment obtained by the proposed model can save the total maintenance expenditures by 14.71%, extend the average pavement service life span of G5, G93 and G76 by 5.4 months, save the fuel consumption by an average of 7.6% and reduce pollutant emissions by an average of 6.8% on NOX, 7.7% on CO2 and 7.1% on CO in spite of a little increase of 6.2% on travel time of class 5 to 11.
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| T | Total travel time |
| {O} | Set of origin nodes |
| {D} | Set of destination nodes |
| {A} | Set of direct links |
| p | Arbitrary elements of {O} |
| q | Arbitrary elements of {D} |
| a | Arbitrary elements of {A} |
| va | Traffic flow on link a |
| sa(v) | Traffic delay function for link a |
| Kpq | Set of paths from p to q |
| k | Arbitrary element of Kpq |
| hk,pq | Trips per unit time on path k from p to q |
| gpq | Traffic demand per unit time from p to q |
| δak,pq | If link a lies on path k from p to q, δak,pq = 1, otherwise, δak,pq = 0 |
| P0 | Initial PSI |
| Pc | Terminal PSI of 2.5 |
| α, β | Coefficients |
| N | Number of highway segments |
| n | Number of vehicle types |
| m | Number of axle weight groups |
| Qij | Traffic volume of vehicle class i, which belongs to axle weight group j |
| LEFij | Load equivalency factor of weight group j in vehicle class i |
| Qsij | Traffic flow of vehicle class i in axle weight group j on highway segment s |
| P | Average PSI decline of all highway segments |
| Ps0 | Initial PSI of highway segment s |
| Psc | Terminal PSI of highway segment s |
| LEFsij | Load equivalency factor of axle weight group j in vehicle class i on segment s |
| W | Set of OD pairs |
| Kw | Set of paths of OD pair w |
| hkwij | Traffic flow of vehicle class i in axle weight group j on path k of OD pair w |
| qw | Traffic need of OD pair w |
| δswkij | If highway segment s with traffic flow of vehicle class i in axle weight group, j lies on path, k of OD pair, w, δswkij =1, otherwise, δswkij = 0 |
| τs | Lower limit value of PSI of highway segments s |
| αs, βs | Coefficients of highway segment s |
| θ | Weight factor for objective function |
| Pmin | Minimum values of P |
| Tmin | Minimum values of T |
| D | Number of subjects |
| V | Population of learners |
| xφγ | Learner γ in subject φ |
| F(x) φ,best | Best learner in subject φ |
| Xφ,teacher | Chief teacher in subject φ |
| Mφ | Mean value of learners in subject φ |
| M_newφ | New mean value of learners in subject φ |
| TFφ | Teaching factor |
| Differenceφ | Difference between Mφ and M_newφ |
| xφ,oldγ | Old knowledge of learner γ in subject φ |
| xφ,newγ | New knowledge of learner γ in subject φ |
| Mean value of slop variance in the wheel paths | |
| Mean rut depth | |
| C | Cracking |
| G | Patching |
| L | Length of the highway segment |
| σ | Number of lanes of the highway segment |
| MOT | Ministry of Transport |
| ESAL | Equivalent number of standard axle |
| PSI | Present serviceability index |
| DTA | Dynamic traffic assignment |
| OD | Origin-destination |
| MPM | Mathematical programming model |
| OCM | Optimal control model |
| VIM | Variational inequality model |
| BPR | Bureau of Public Roads |
| FHWA | Federal Highway Administration |
| GA | Genetic Algorithm |
| AIA | Artificial immune algorithm |
| ACO | Ant colony optimization |
| PSO | Particle swarm optimization |
| GSA | Gravitational search algorithm |
| TLBO | Teaching-learning-based optimization |
| CMA | Chengdu Metropolitan Area |
| SHAB | Sichuan Highway Administration Bureau |
| AADT | Annual average daily traffic |
| ATRs | Automatic traffic recorders |
| AVCs | Automatic vehicle classifiers |
| WIM | Weigh-in-motion |
| VLPR | Vehicle license plate recognition |
| AASHTO | American Association of State Highway and Transportation Officials |
References
- Wang, K.C. Designs and implementations of automated systems for pavement surface distress survey. J. Infrastruct. Syst. 2000, 6, 24–32. [Google Scholar] [CrossRef]
- Juang, C.; Amirkhanian, S. Unified pavement distress index for managing flexible pavements. J. Transp. Eng. 1992, 118, 686–699. [Google Scholar] [CrossRef]
- Ministry of Transport of the People’s Republic of China. Statistical Report of National Highways. 2013–2017. Available online: http://www.mot.gov.cn/shuju/ (accessed on 10 November 2018).
- Chai, J.-C.; Miura, N. Traffic-load-induced permanent deformation of road on soft subsoil. J. Geotech. Geoenviron. Eng. 2002, 128, 907–916. [Google Scholar] [CrossRef]
- Prozzi, J.A.; Hong, F.; Leung, A. Effect of traffic load measurement bias on pavement life prediction: A mechanistic-empirical perspective. Transp. Res. Rec. 2008, 2087, 91–98. [Google Scholar] [CrossRef]
- Labi, S.; Sinha, K.C. Measures of short-term effectiveness of highway pavement maintenance. J. Transp. Eng. 2003, 129, 673–683. [Google Scholar] [CrossRef]
- Fwa, T.F.; Sinha, K.C. Pavement performance and life-cycle cost analysis. J. Transp. Eng. 1991, 117, 33–46. [Google Scholar] [CrossRef]
- Peeta, S.; Ziliaskopoulos, A.K. Foundations of dynamic traffic assignment: The past, the present and the future. Netw. Spat. Econ. 2001, 1, 233–265. [Google Scholar] [CrossRef]
- Bertsekas, D.P.; Gafni, E.M. Projection methods for variational inequalities with application to the traffic assignment problem. In Nondifferential and Variational Techniques in Optimization; Springer: Berlin, Germany, 1982; pp. 139–159. [Google Scholar]
- Xu, S.; Jiang, W.; Deng, X.; Shou, Y. A modified Physarum-inspired model for the user equilibrium traffic assignment problem. Appl. Math. Model. 2018, 55, 340–353. [Google Scholar] [CrossRef]
- Shafiei, S.; Gu, Z.; Saberi, M. Calibration and validation of a simulation-based dynamic traffic assignment model for a large-scale congested network. Simul. Model. Pract. Theory 2018, 86, 169–186. [Google Scholar] [CrossRef]
- Merchant, D.K.; Nemhauser, G.L. A model and an algorithm for the dynamic traffic assignment problem. In Traffic Equilibrium Methods; Springer: Berlin, Germany, 1976; pp. 265–273. [Google Scholar]
- Carey, M.; Subrahmanian, E. An approach to modelling time-varying flows on congested networks. Transp. Res. Part B Methodol. 2000, 34, 157–183. [Google Scholar] [CrossRef]
- Yang, H.; Sasaki, T.; Iida, Y.; Asakura, Y. Estimation of origin-destination matrices from link traffic counts on congested networks. Transp. Res. Part B Methodol. 1992, 26, 417–434. [Google Scholar] [CrossRef]
- Friesz, T.L.; Luque, J.; Tobin, R.L.; Wie, B.-W. Dynamic network traffic assignment considered as a continuous time optimal control problem. Oper. Res. 1989, 37, 893–901. [Google Scholar] [CrossRef]
- Ran, B.; Boyce, D.E.; LeBlanc, L.J. A new class of instantaneous dynamic user-optimal traffic assignment models. Oper. Res. 1993, 41, 192–202. [Google Scholar] [CrossRef]
- Srinivas, P. System optimal dynamic traffic assignment in congested networks with advanced information systems. Transp. Res. Part A 1996, 1, 75–76. [Google Scholar]
- Bliemer, M.C.; Bovy, P.H. Quasi-variational inequality formulation of the multiclass dynamic traffic assignment problem. Transp. Res. Part B Methodol. 2003, 37, 501–519. [Google Scholar] [CrossRef]
- Lo, H.K.; Szeto, W.Y. A cell-based variational inequality formulation of the dynamic user optimal assignment problem. Transp. Res. Part B Methodol. 2002, 36, 421–443. [Google Scholar] [CrossRef]
- Marcotte, P. A new algorithm for solving variational inequalities with application to the traffic assignment problem. Math. Program. 1985, 33, 339–351. [Google Scholar] [CrossRef]
- Ziliaskopoulos, A.K. A linear programming model for the single destination system optimum dynamic traffic assignment problem. Transp. Sci. 2000, 34, 37–49. [Google Scholar] [CrossRef]
- Birge, J.R.; Ho, J.K. Optimal flows in stochastic dynamic networks with congestion. Oper. Res. 1993, 41, 203–216. [Google Scholar] [CrossRef]
- Janson, B.N. Dynamic traffic assignment for urban road networks. Transp. Res. Part B Methodol. 1991, 25, 143–161. [Google Scholar] [CrossRef]
- Wie, B.-W.; Friesz, T.L.; Tobin, R.L. Dynamic user optimal traffic assignment on congested multidestination networks. Transp. Res. Part B Methodol. 1990, 24, 431–442. [Google Scholar] [CrossRef]
- Chow, A.H. Properties of system optimal traffic assignment with departure time choice and its solution method. Transp. Res. Part B Methodol. 2009, 43, 325–344. [Google Scholar] [CrossRef]
- Dafermos, S. Traffic equilibrium and variational inequalities. Transp. Sci. 1980, 14, 42–54. [Google Scholar] [CrossRef]
- Friesz, T.L.; Bernstein, D.; Smith, T.E.; Tobin, R.L.; Wie, B.-W. A variational inequality formulation of the dynamic network user equilibrium problem. Oper. Res. 1993, 41, 179–191. [Google Scholar] [CrossRef]
- Ran, B.; Boyce, D.E. A link-based variational inequality formulation of ideal dynamic user-optimal route choice problem. Transp. Res. Part C Emerg. Technol. 1996, 4, 1–12. [Google Scholar] [CrossRef]
- Fernandes, P.; Nunes, U. Platooning of autonomous vehicles with intervehicle communications in SUMO traffic simulator. In Proceedings of the 13th International IEEE Conference on Intelligent Transportation Systems (ITSC), Funchal, Madeira Island, Portugal, 19–22 September 2010; pp. 1313–1318. [Google Scholar]
- Peeta, S.; Mahmassani, H.S. Multiple user classes real-time traffic assignment for online operations: A rolling horizon solution framework. Transp. Res. Part C Emerg. Technol. 1995, 3, 83–98. [Google Scholar] [CrossRef]
- Piorkowski, M.; Raya, M.; Lugo, A.L.; Papadimitratos, P.; Grossglauser, M.; Hubaux, J.-P. TraNS: Realistic joint traffic and network simulator for VANETs. ACM SIGMOBILE Mob. Comput. Commun. Rev. 2008, 12, 31–33. [Google Scholar] [CrossRef]
- Treiber, M.; Kesting, A. An open-source microscopic traffic simulator. IEEE Intell. Transp. Syst. Mag. 2010, 2, 6–13. [Google Scholar] [CrossRef]
- Yang, Q.; Koutsopoulos, H.N. A microscopic traffic simulator for evaluation of dynamic traffic management systems. Transp. Res. Part C Emerg. Technol. 1996, 4, 113–130. [Google Scholar] [CrossRef]
- Fisk, C. Some developments in equilibrium traffic assignment. Transp. Res. Part B Methodol. 1980, 14, 243–255. [Google Scholar] [CrossRef]
- Fwa, T.; Gan, K. Bus-ride panel rating of pavement serviceability. J. Transp. Eng. 1989, 115, 176–191. [Google Scholar] [CrossRef]
- Alsherri, A.; George, K. Reliability model for pavement performance. J. Transp. Eng. 1988, 114, 294–306. [Google Scholar] [CrossRef]
- Pais, J.C.; Amorim, S.I.; Minhoto, M.J. Impact of traffic overload on road pavement performance. J. Transp. Eng. 2013, 139, 873–879. [Google Scholar] [CrossRef]
- Wang, J.; Mao, X.; Li, Z.; Moore, A.; Staley, S. Determining the reasonable scale of a toll highway network in China. J. Transp. Eng. 2014, 140, 04014046. [Google Scholar] [CrossRef]
- Zangwill, W.I. Non-linear programming via penalty functions. Manag. Sci. 1967, 13, 344–358. [Google Scholar] [CrossRef]
- Goldberg, D.E.; Holland, J.H. Genetic algorithms and machine learning. Mach. Learn. 1988, 3, 95–99. [Google Scholar] [CrossRef]
- Holland, J.H. Outline for a logical theory of adaptive systems. J. ACM (JACM) 1962, 9, 297–314. [Google Scholar] [CrossRef]
- Farmer, J.D.; Packard, N.H.; Perelson, A.S. The immune system, adaptation, and machine learning. Phys. D Nonlinear Phenom. 1986, 22, 187–204. [Google Scholar] [CrossRef]
- Drigo, M. The ant system: Optimization by a colony of cooperating agents. IEEE Trans. Syst. Man Cybern. Part B 1996, 26, 1–13. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R.C. A discrete binary version of the particle swarm algorithm. In Proceedings of the 1997 IEEE International Conference on Systems, Man, and Cybernetics. Computational Cybernetics and Simulation, Orlando, FL, USA, 12–15 October 1997; pp. 4104–4108. [Google Scholar]
- Rashedi, E.; Nezamabadi-Pour, H.; Saryazdi, S. GSA: A gravitational search algorithm. Inf. Sci. 2009, 179, 2232–2248. [Google Scholar] [CrossRef]
- Rao, R.V.; Savsani, V.J.; Vakharia, D. Teaching–learning-based optimization: A novel method for constrained mechanical design optimization problems. Comput. Aided Des. 2011, 43, 303–315. [Google Scholar] [CrossRef]
- Rao, R.V.; Patel, V. An improved teaching-learning-based optimization algorithm for solving unconstrained optimization problems. Sci. Iran. 2013, 20, 710–720. [Google Scholar] [CrossRef]
- Patel, V.K.; Savsani, V.J. A multi-objective improved teaching–learning based optimization algorithm (MO-ITLBO). Inf. Sci. 2016, 357, 182–200. [Google Scholar] [CrossRef]
- Rao, R.V.; Patel, V. Multi-objective optimization of heat exchangers using a modified teaching-learning-based optimization algorithm. Appl. Math. Model. 2013, 37, 1147–1162. [Google Scholar] [CrossRef]
- Zhang, Z.; Leidy, J.; Kawa, I.; Hudson, W. Impact of changing traffic characteristics and environmental conditions on flexible pavements. Transp. Res. Rec. J. Transp. Res. Board 2000, 125–131. [Google Scholar] [CrossRef]
- Swan, D.; Tardif, R.; Hajek, J.J.; Hein, D.K. Development of regional traffic data for the mechanistic–empirical pavement design guide. Transp. Res. Rec. 2008, 2049, 54–62. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle Class | Description |
|---|---|
| Class 1 | Motorcycles |
| Class 2 | Passenger cars |
| Class 3 | Two-axle, four-tire single units |
| Class 4 | Buses |
| Class 5 | Two-axle, six-tire single units |
| Class 6 | Three-axle single units |
| Class 7 | Four or more axle single units |
| Class 8 | Four or less axle single trailers |
| Class 9 | Five-axle single trailers |
| Class 10 | Six or more axle single trailers |
| Class 11 | Five or less axle multitrailers |
| Class 12 | Six-axle multitrailers |
| Class 13 | Seven or more axle multitrailers |
| Highway | Segment | Class 5 | Class 6 | Class 7 | Class 8 | Class 9 | Class 10 | Class 11 | Total |
|---|---|---|---|---|---|---|---|---|---|
| G5 | H1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| H2 | −145(19.28%) | −99(13.16%) | −76(10.11%) | −141(18.75%) | −152(20.21%) | −124(16.49%) | −15(1.99%) | −752(100%) | |
| H3 | −131(19.21%) | −93(13.64%) | −59(8.65%) | −124(18.18%) | −145(21.26%) | −118(17.3%) | −12(1.76%) | −682(100%) | |
| H4 | −146(21.35%) | −96(14.04%) | −65(9.5%) | −127(18.57%) | −118(17.25%) | −117(17.11%) | −15(2.19%) | −684(100%) | |
| H5 | −15(8.93%) | −25(14.88%) | −26(15.48%) | −42(25%) | −23(13.69%) | −31(18.45%) | −6(3.57%) | −168(100%) | |
| G93 | H6 | −134(19.03%) | −76(10.8%) | −79(11.22%) | −128(18.18%) | −142(20.17%) | −134(19.03%) | −11(1.56%) | −704(100%) |
| H7 | −129(18.25%) | −72(10.18%) | −68(9.62%) | −142(20.08%) | −163(23.06%) | −121(17.11%) | −12(1.7%) | −707(100%) | |
| H8 | −131(18.74%) | −102(14.59%) | −31(4.43%) | −134(19.17%) | −158(22.6%) | −127(18.17%) | −16(2.29%) | −699(100%) | |
| G213 | H9 | 41(15.07%) | 35(12.87%) | 34(12.5%) | 56(20.59%) | 58(21.32%) | 36(13.24%) | 12(4.41%) | 272(100%) |
| H10 | 153(16.85%) | 116(12.78%) | 109(12%) | 181(19.93%) | 186(20.48%) | 128(14.1%) | 35(3.85%) | 908(100%) | |
| H11 | 108(18.52%) | 79(13.55%) | 46(7.89%) | 114(19.55%) | 135(23.16%) | 86(14.75%) | 15(2.57%) | 583(100%) | |
| S4 | H12 | 96(17.81%) | 56(10.39%) | 58(10.76%) | 102(18.92%) | 116(21.52%) | 98(18.18%) | 13(2.41%) | 539(100%) |
| H13 | 147(21.09%) | 98(14.06%) | 94(13.49%) | 119(17.07%) | 109(15.64%) | 112(16.07%) | 18(2.58%) | 697(100%) | |
| G76 | H14 | −124(24.7%) | −112(22.31%) | −73(14.54%) | 108(−21.51%) | −134(26.69%) | −156(31.08%) | −11(2.19%) | −502(100%) |
| H15 | −116(18.68%) | −67(10.79%) | −68(10.95%) | −124(19.97%) | −121(19.48%) | −112(18.04%) | −13(2.09%) | −621(100%) | |
| S3 | H16 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| H17 | 127(27.31%) | 106(22.8%) | 74(15.91%) | 135(29.03%) | 161(34.62%) | −156(−33.55%) | 18(3.87%) | 465(100%) | |
| H18 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| S40 | H19 | 13(11.82%) | 12(10.91%) | 13(11.82%) | 18(16.36%) | 24(21.82%) | 19(17.27%) | 11(10%) | 110(100%) |
| H20 | 18(15.93%) | 21(18.58%) | 14(12.39%) | 16(14.16%) | 15(13.27%) | 21(18.58%) | 8(7.08%) | 113(100%) | |
| H21 | 127(16.58%) | 116(15.14%) | 74(9.66%) | 127(16.58%) | 148(19.32%) | 164(21.41%) | 10(1.31%) | 766(100%) | |
| H22 | 26(9.59%) | 47(17.34%) | 32(11.81%) | 41(15.13%) | 56(20.66%) | 61(22.51%) | 8(2.95%) | 271(100%) | |
| H23 | 43(12.61%) | 63(18.48%) | 61(17.89%) | 56(16.42%) | 58(17.01%) | 52(15.25%) | 8(2.35%) | 341(100%) | |
| H24 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| S93 | H25 | 12(24.49%) | 5(10.2%) | 5(10.2%) | 7(14.29%) | 9(18.37%) | 8(16.33%) | 3(6.12%) | 49(100%) |
| H26 | 9(11.25%) | 12(15%) | 13(16.25%) | 11(13.75%) | 15(18.75%) | 14(17.5%) | 6(7.5%) | 80(100%) | |
| H27 | 5(12.5%) | 4(10%) | 7(17.5%) | 6(15%) | 6(15%) | 8(20%) | 4(10%) | 40(100%) |
| Highway | Segment | Class 5 | Class 6 | Class 7 | Class 8 | Class 9 | Class 10 | Class 11 | Total |
|---|---|---|---|---|---|---|---|---|---|
| G5 | H1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| H2 | −167(19.56%) | −112(13.11%) | −86(10.07%) | −156(18.27%) | −180(21.08%) | −134(15.69%) | −19(2.22%) | −854(100%) | |
| H3 | −150(19.53%) | −101(13.15%) | −77(10.03%) | −140(18.23%) | −162(21.09%) | −121(15.76%) | −17(2.21%) | −768(100%) | |
| H4 | −187(23.17%) | −96(11.9%) | −82(10.16%) | −150(18.59%) | −149(18.46%) | −128(15.86%) | −15(1.86%) | −807(100%) | |
| H5 | −21(11.17%) | −22(11.7%) | −25(13.3%) | −55(29.26%) | −25(13.3%) | −31(16.49%) | −9(4.79%) | −188(100%) | |
| G93 | H6 | −144(17.43%) | −97(11.74%) | −86(10.41%) | −161(19.49%) | −174(21.07%) | −150(18.16%) | −14(1.69%) | −826(100%) |
| H7 | −155(18.56%) | −94(11.26%) | −91(10.9%) | −164(19.64%) | −179(21.44%) | −134(16.05%) | −18(2.16%) | −835(100%) | |
| H8 | −147(18.89%) | −112(14.4%) | −27(3.47%) | −150(19.28%) | −188(24.16%) | −140(17.99%) | −14(1.8%) | −778(100%) | |
| G213 | H9 | 50(16.18%) | 38(12.3%) | 44(14.24%) | 64(20.71%) | 59(19.09%) | 46(14.89%) | 8(2.59%) | 309(100%) |
| H10 | 198(17.38%) | 156(13.7%) | 131(11.5%) | 220(19.32%) | 232(20.37%) | 163(14.31%) | 39(3.42%) | 1139(100%) | |
| H11 | 131(20.37%) | 90(14%) | 48(7.47%) | 126(19.6%) | 136(21.15%) | 98(15.24%) | 14(2.18%) | 643(100%) | |
| S4 | H12 | 104(17.51%) | 69(11.62%) | 62(10.44%) | 116(19.53%) | 125(21.04%) | 108(18.18%) | 10(1.68%) | 594(100%) |
| H13 | 164(20.79%) | 109(13.81%) | 104(13.18%) | 151(19.14%) | 123(15.59%) | 121(15.34%) | 17(2.15%) | 789(100%) | |
| G76 | H14 | −129(17%) | −119(15.68%) | −73(9.62%) | −134(17.65%) | −154(20.29%) | −135(17.79%) | −15(1.98%) | −759(100%) |
| H15 | −130(18.57%) | −89(12.71%) | −72(10.29%) | −139(19.86%) | −136(19.43%) | −122(17.43%) | −12(1.71%) | −700(100%) | |
| S3 | H16 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| H17 | 133(14.96%) | 135(15.19%) | 93(10.46%) | 150(16.87%) | 181(20.36%) | 174(19.57%) | 23(2.59%) | 889(100%) | |
| H18 | 132(15.53%) | 109(12.82%) | 181(21.29%) | 130(15.29%) | 156(18.35%) | 130(15.29%) | 12(1.41%) | 850(100%) | |
| S40 | H19 | 13(10.08%) | 17(13.18%) | 18(13.95%) | 19(14.73%) | 31(24.03%) | 20(15.5%) | 11(8.53%) | 129(100%) |
| H20 | 15(13.04%) | 22(19.13%) | 13(11.3%) | 16(13.91%) | 15(13.04%) | 22(19.13%) | 12(10.43%) | 115(100%) | |
| H21 | 163(18.27%) | 128(14.35%) | 77(8.63%) | 140(15.7%) | 186(20.85%) | 187(20.96%) | 11(1.23%) | 892(100%) | |
| H22 | 25(7.96%) | 53(16.88%) | 46(14.65%) | 50(15.92%) | 61(19.43%) | 72(22.93%) | 7(2.23%) | 314(100%) | |
| H23 | 47(12.57%) | 81(21.66%) | 60(16.04%) | 61(16.31%) | 62(16.58%) | 56(14.97%) | 7(1.87%) | 374(100%) | |
| H24 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| S93 | H25 | 11(20.75%) | 7(13.21%) | 6(11.32%) | 8(15.09%) | 11(20.75%) | 8(15.09%) | 2(3.77%) | 53(100%) |
| H26 | 13(13.83%) | 13(13.83%) | 13(13.83%) | 15(15.96%) | 21(22.34%) | 13(13.83%) | 6(6.38%) | 94(100%) | |
| H27 | 5(13.51%) | 4(10.81%) | 8(21.62%) | 7(18.92%) | 6(16.22%) | 5(13.51%) | 2(5.41%) | 37(100%) |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mao, X.; Wang, J.; Yuan, C.; Yu, W.; Gan, J. A Dynamic Traffic Assignment Model for the Sustainability of Pavement Performance. Sustainability 2019, 11, 170. https://doi.org/10.3390/su11010170
Mao X, Wang J, Yuan C, Yu W, Gan J. A Dynamic Traffic Assignment Model for the Sustainability of Pavement Performance. Sustainability. 2019; 11(1):170. https://doi.org/10.3390/su11010170
Chicago/Turabian StyleMao, Xinhua, Jianwei Wang, Changwei Yuan, Wei Yu, and Jiahua Gan. 2019. "A Dynamic Traffic Assignment Model for the Sustainability of Pavement Performance" Sustainability 11, no. 1: 170. https://doi.org/10.3390/su11010170
APA StyleMao, X., Wang, J., Yuan, C., Yu, W., & Gan, J. (2019). A Dynamic Traffic Assignment Model for the Sustainability of Pavement Performance. Sustainability, 11(1), 170. https://doi.org/10.3390/su11010170