A Control Scheme for Variable-Speed Micro-Hydropower Plants


Abstract
1. Introduction
2. Materials and Methods
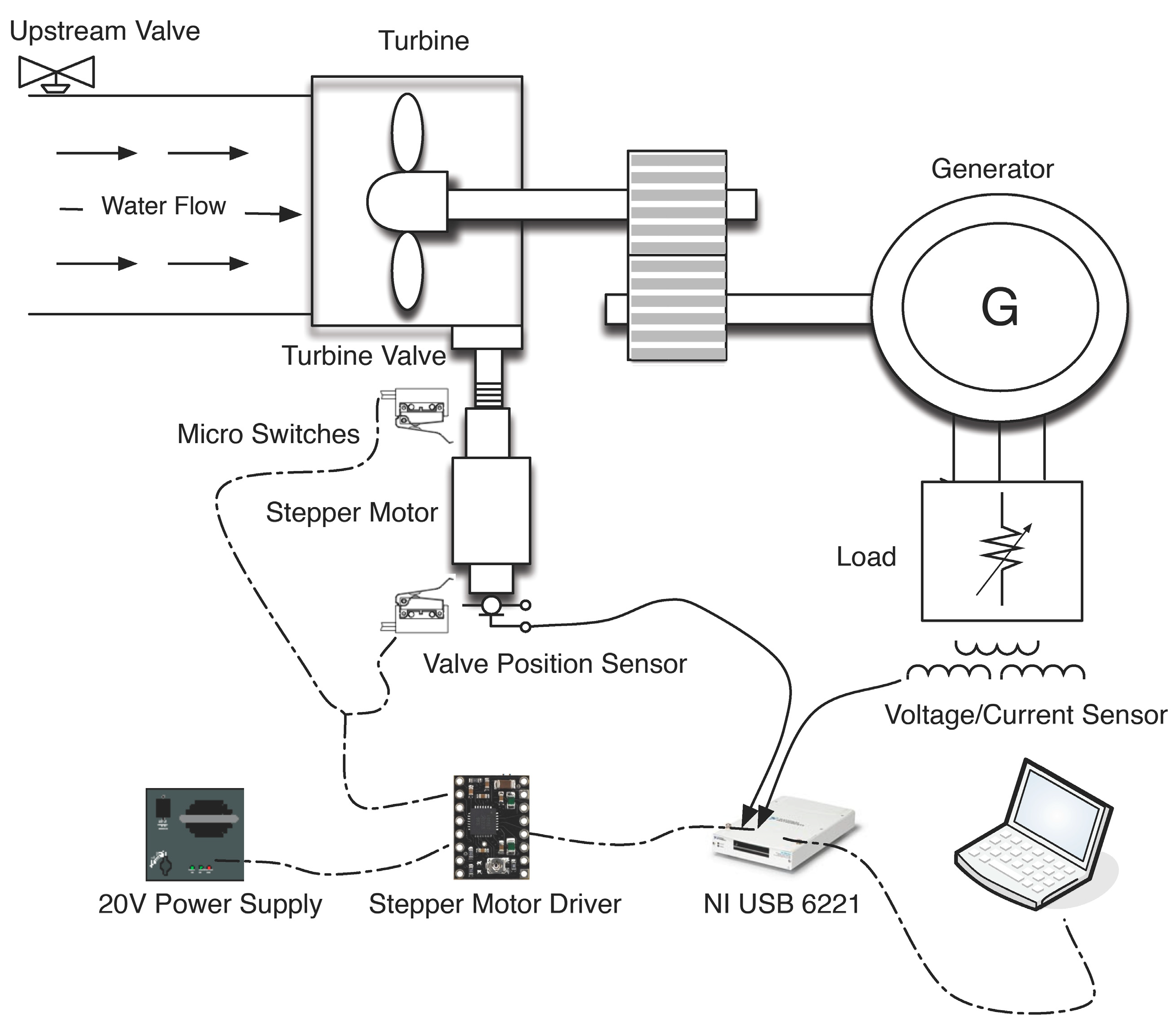
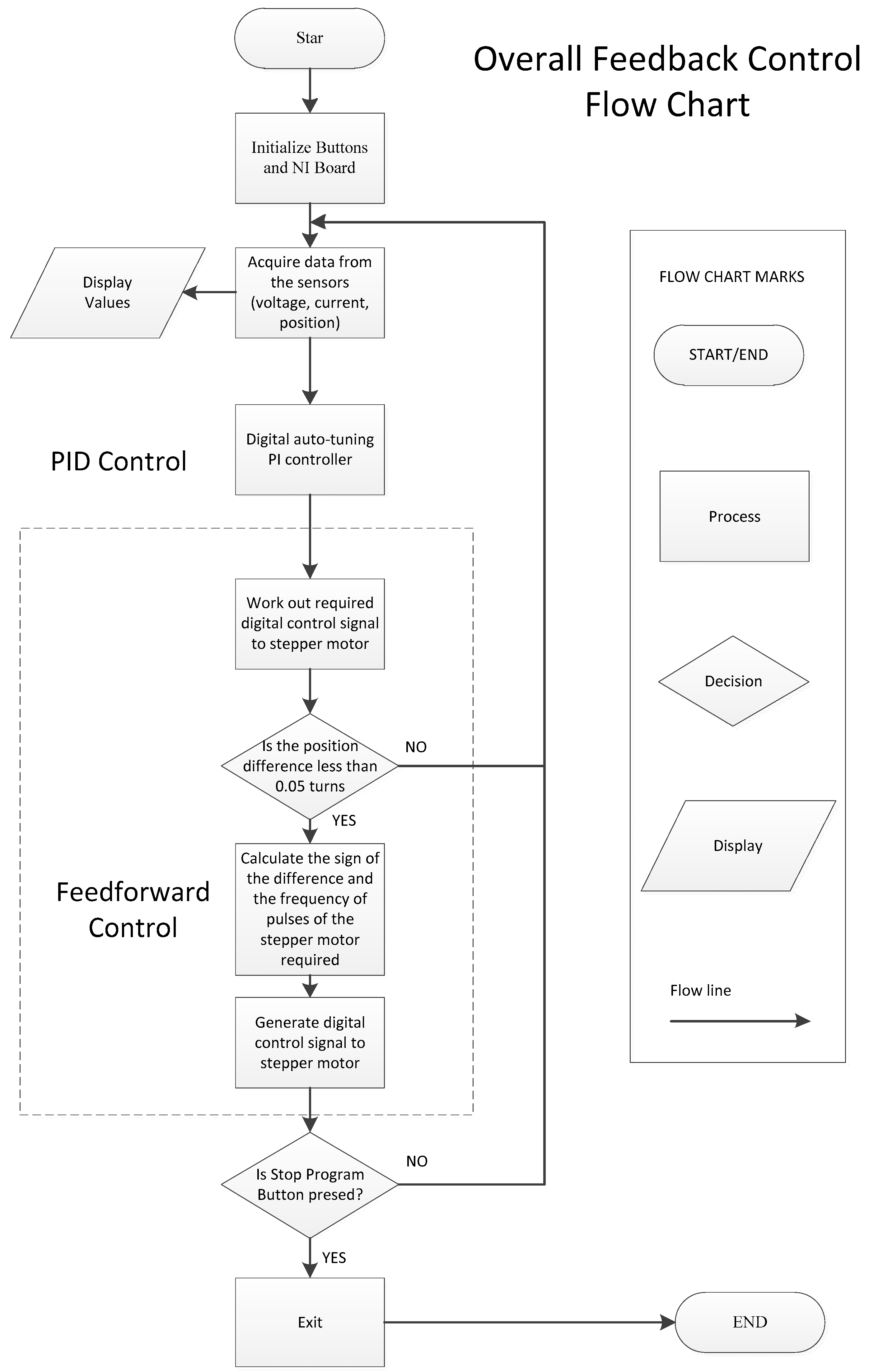
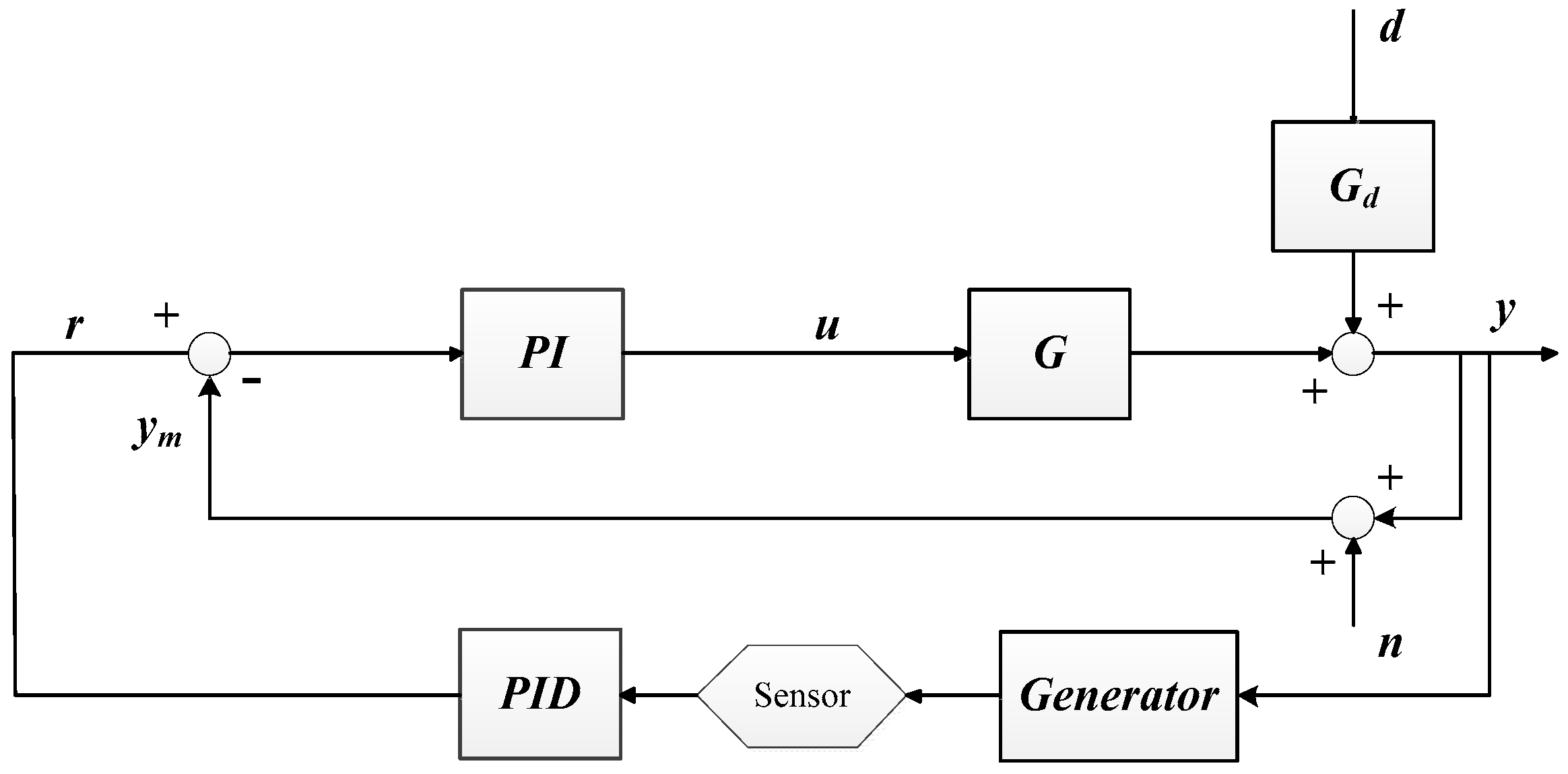
2.1. Overview of the Control Section
2.2. LabVIEW and Data Acquisition
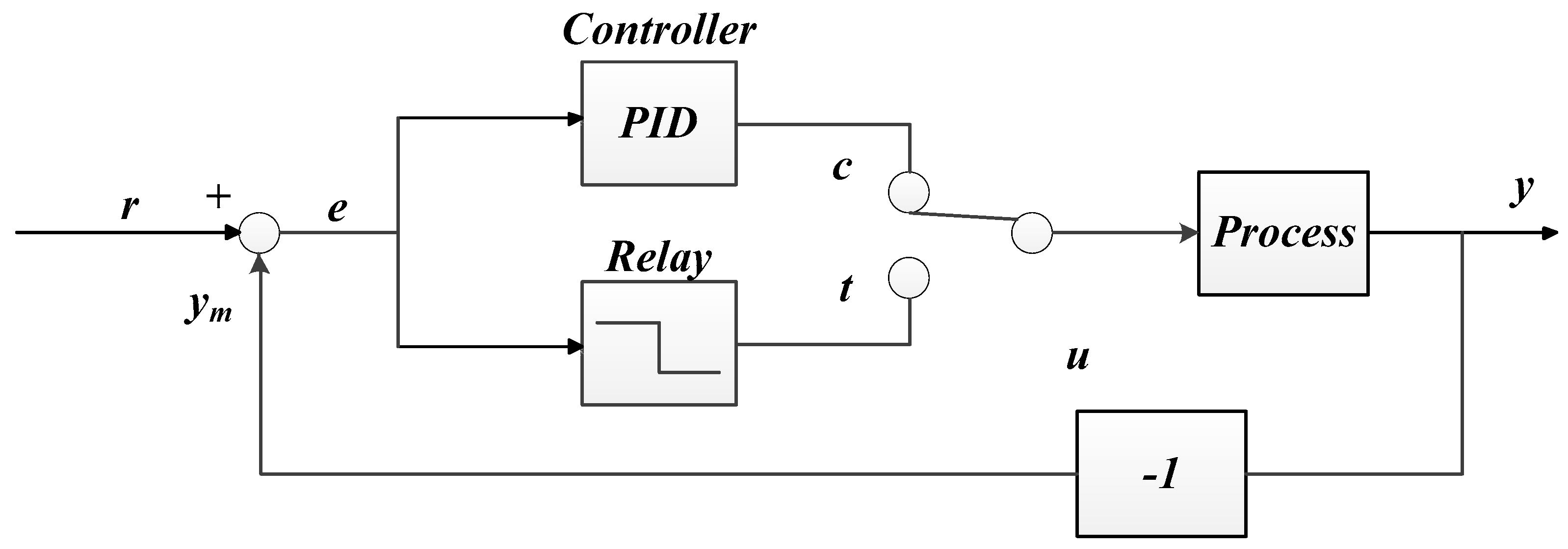
2.3. Method of Autotuning Proportion Integration (PI) Control
2.3.1. Autotuning the PI Control
- Uncertain signal because of unknown disturbance;
- Uncertain models;
- An unstable plant.
2.3.2. Ziegler-Nichols Method
2.3.3. Relay Feedback Tuning
3. Experimental Preparation
3.1. LabVIEW Program
- LabVIEW 2013: Any other version of LabVIEW may support the program; however, new buttons in the 2013 version were used in the front panel. The old versions may indicate a different user interface.
- NI-DAQmx 9.5.5: The DAQmx is the basic drive software designed by National Instruments in order to achieve PC-based data acquisition.
- DAQ assist: This sub-VI is required for communication between the DAQ hardware and the LabVIEW software.
- National Instrument LabVIEW PID and Fuzzy Logic Toolkit: This toolkit is required to integrate PI and autotuning control algorithms into the LabVIEW programs.
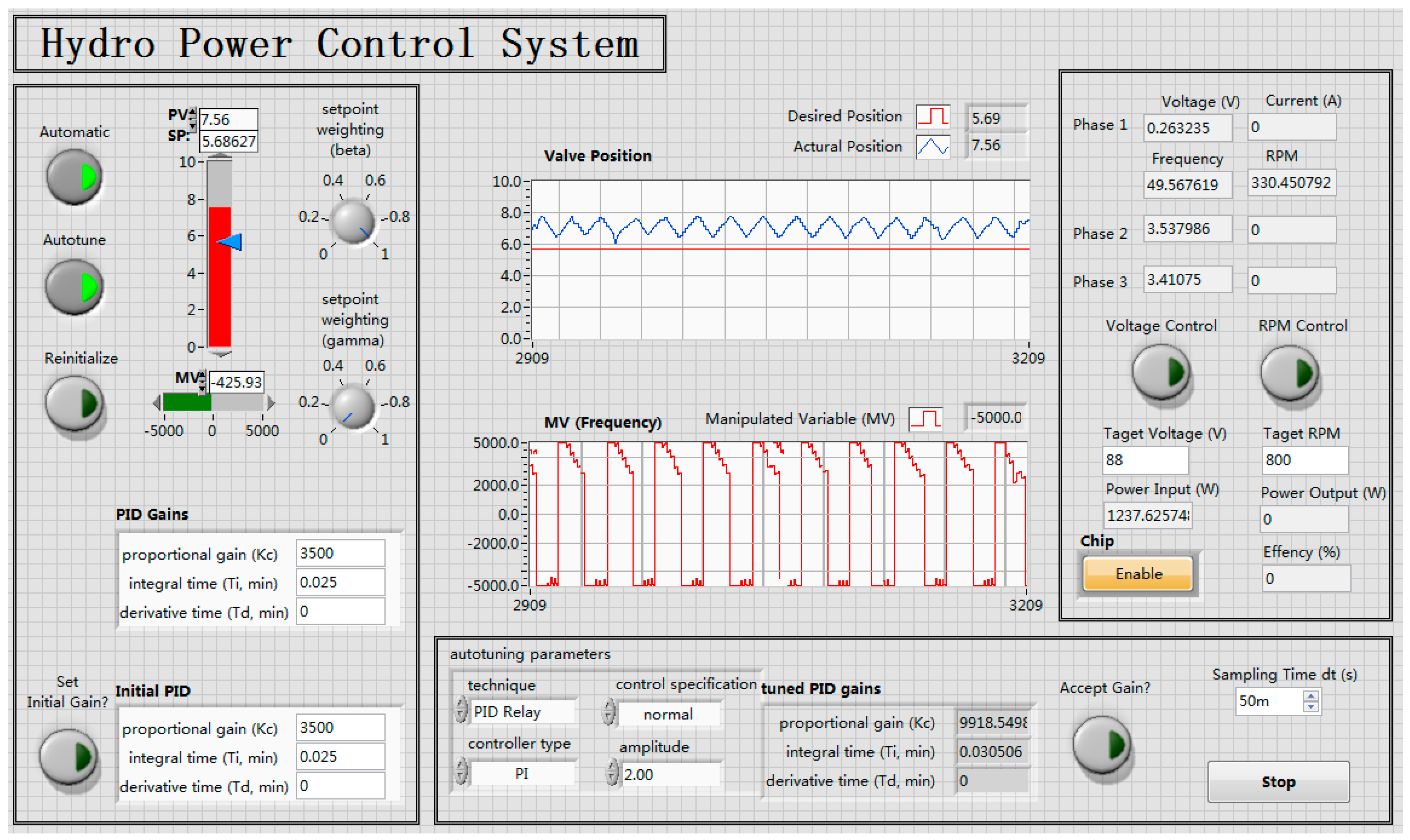
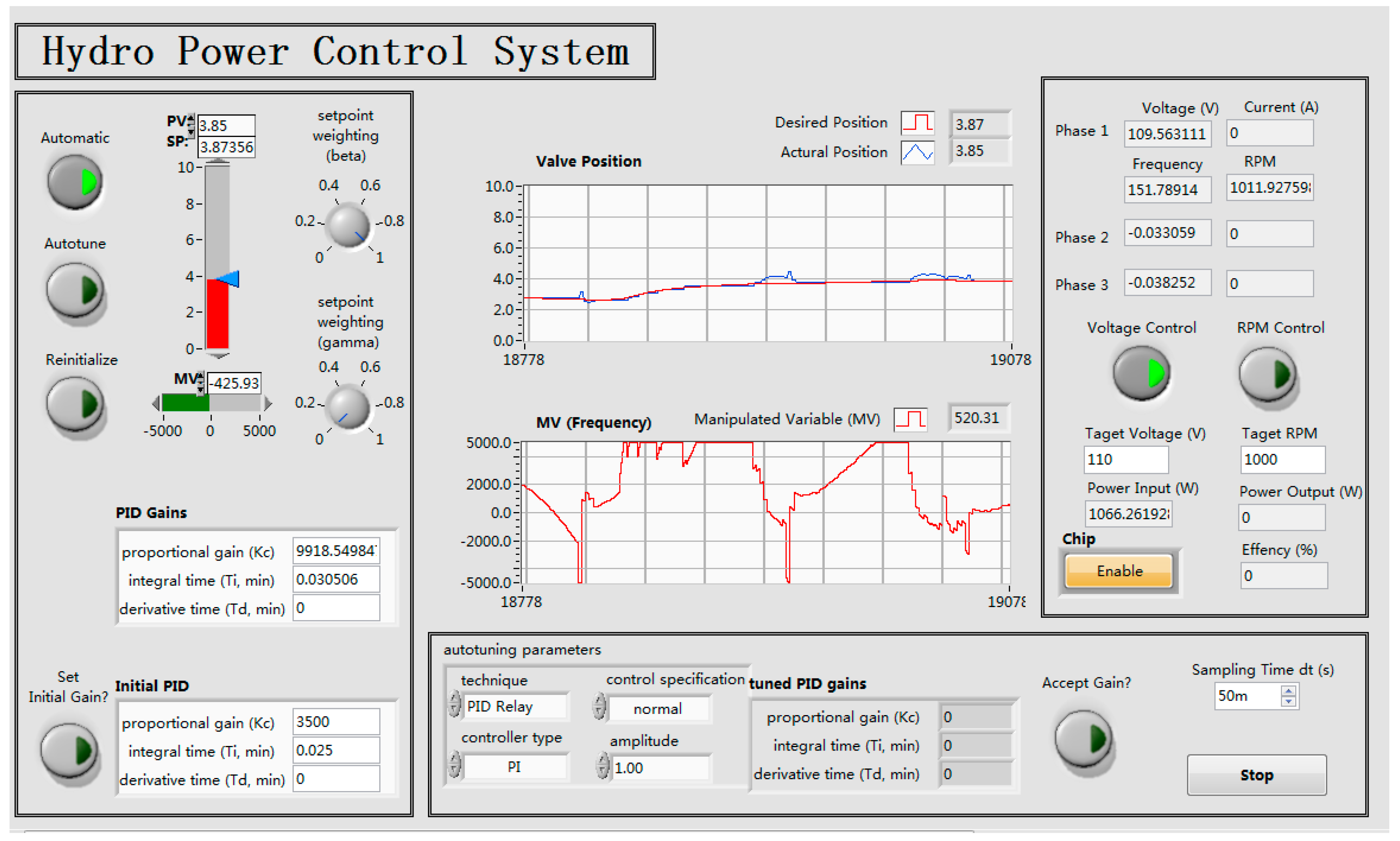
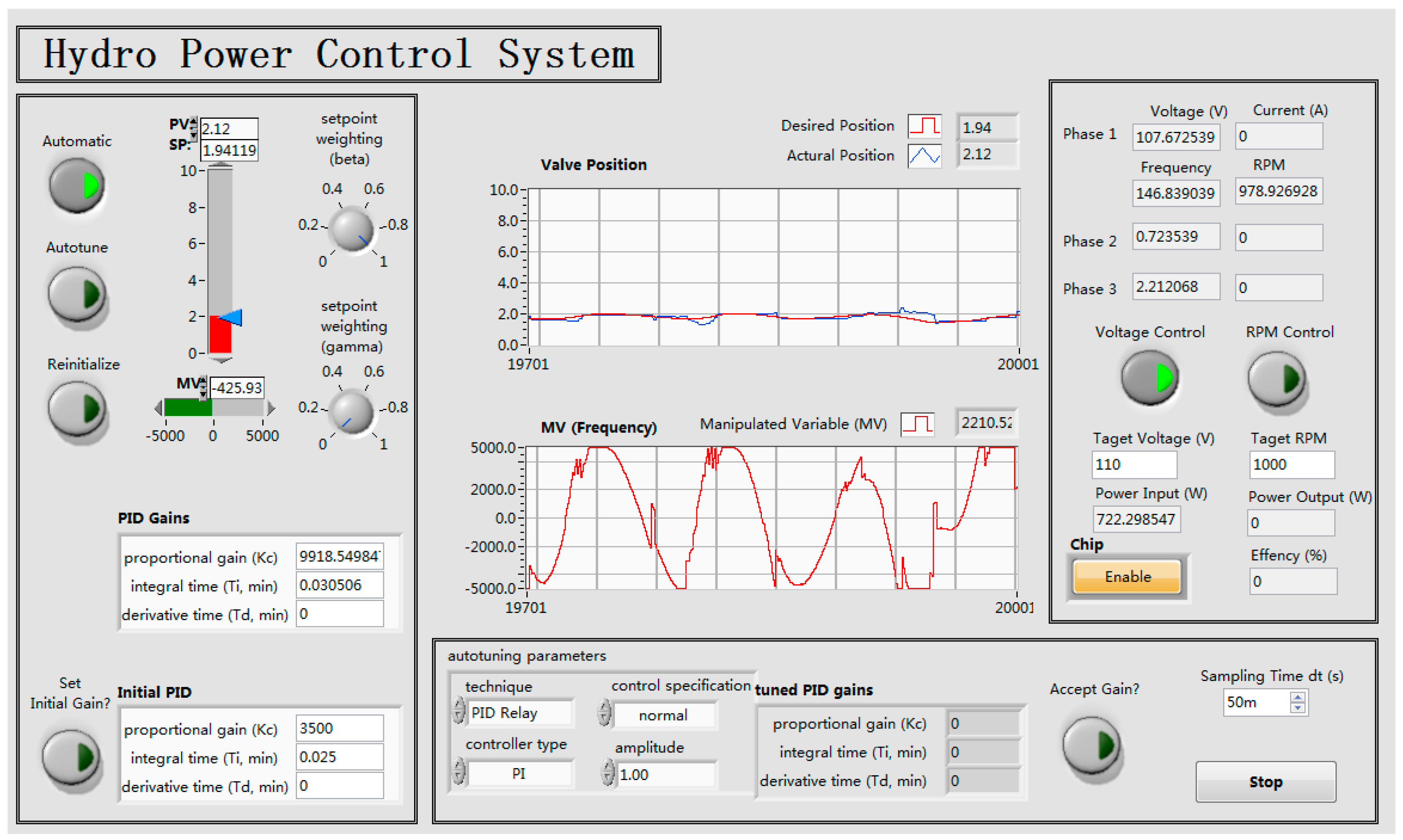
3.1.1. Front Panel
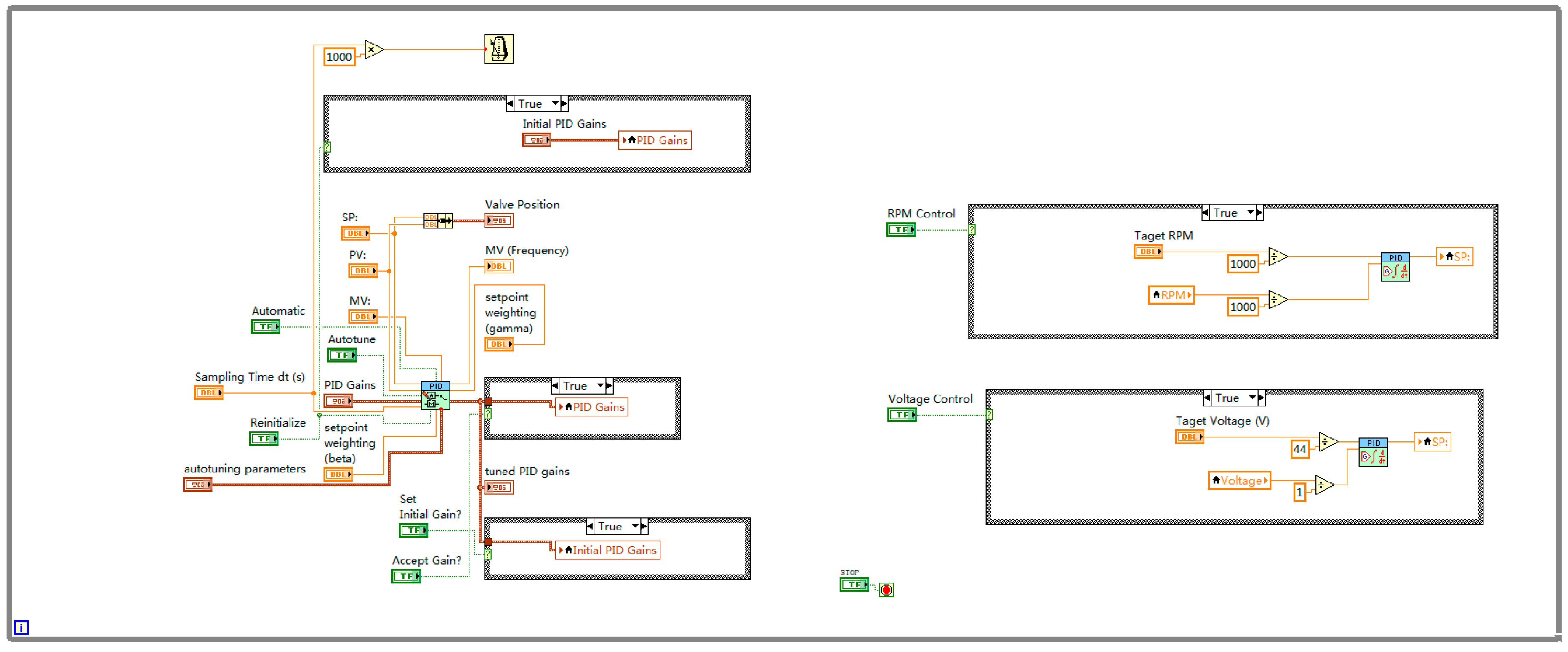
3.1.2. Block Diagrams
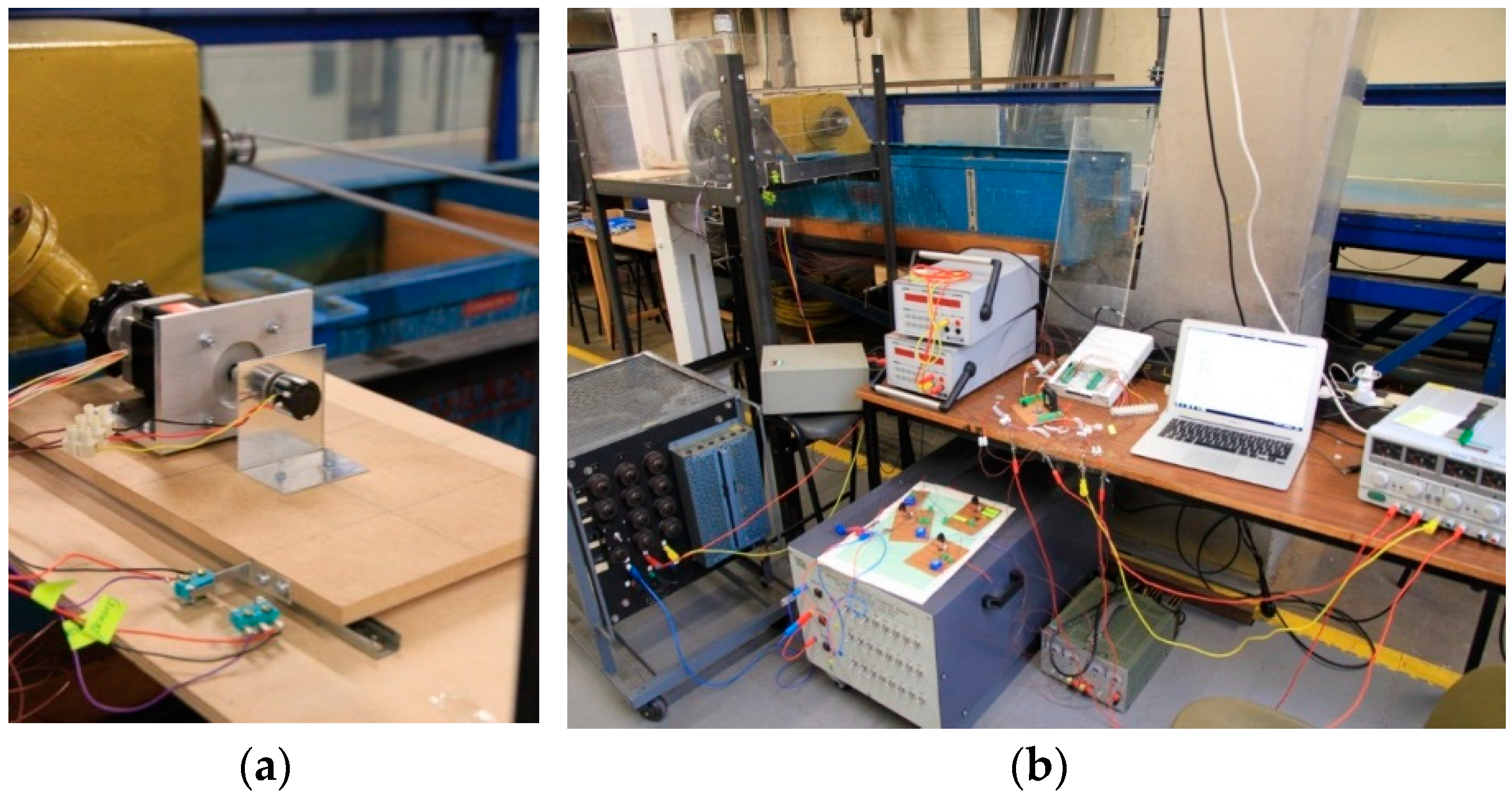
3.2. Experimental Apparatus
3.2.1. Stepper Motor
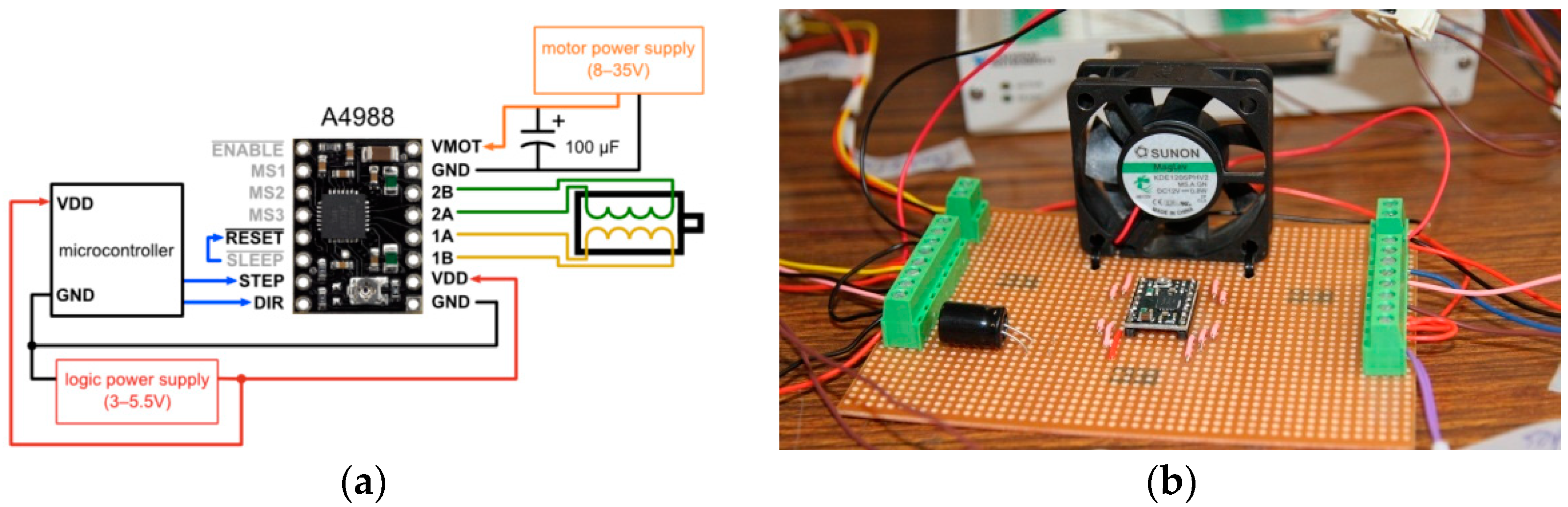
3.2.2. Stepper Motor Driver
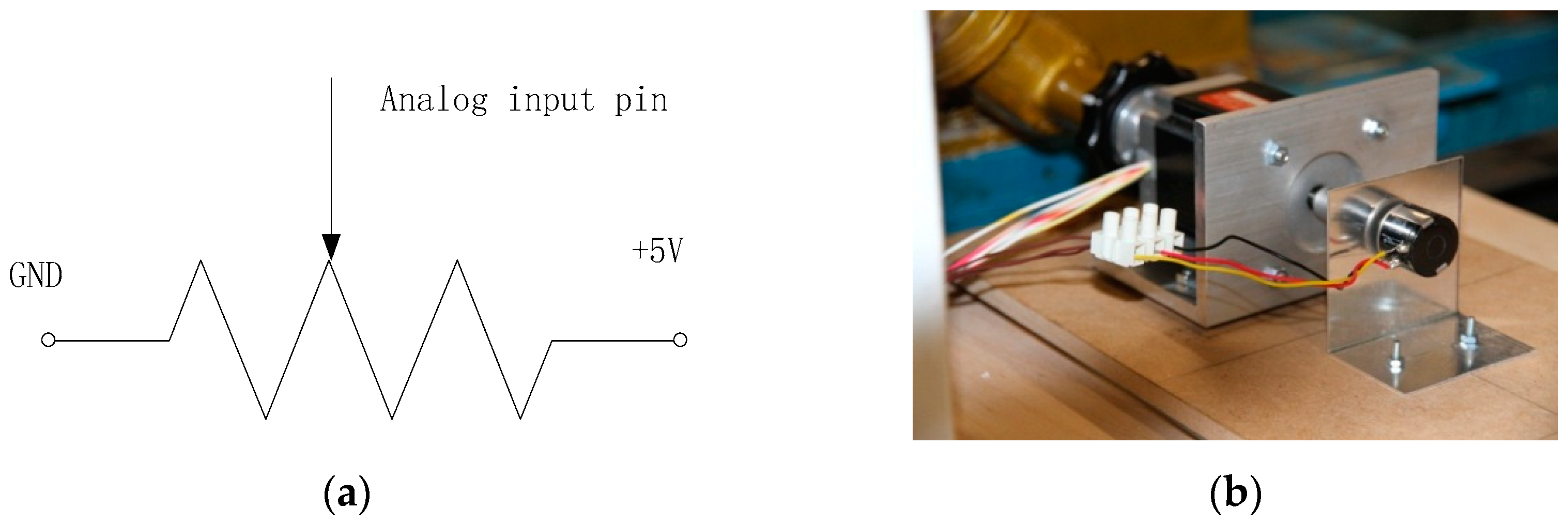
3.2.3. Potentiometer
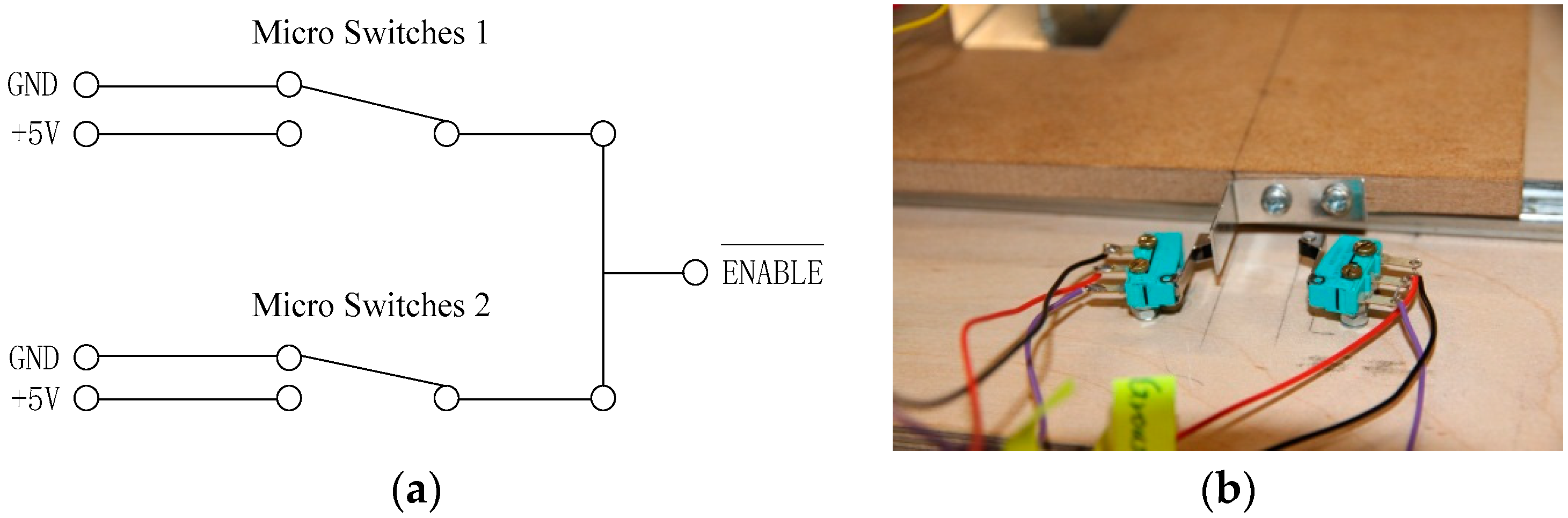
3.2.4. Micro Switches
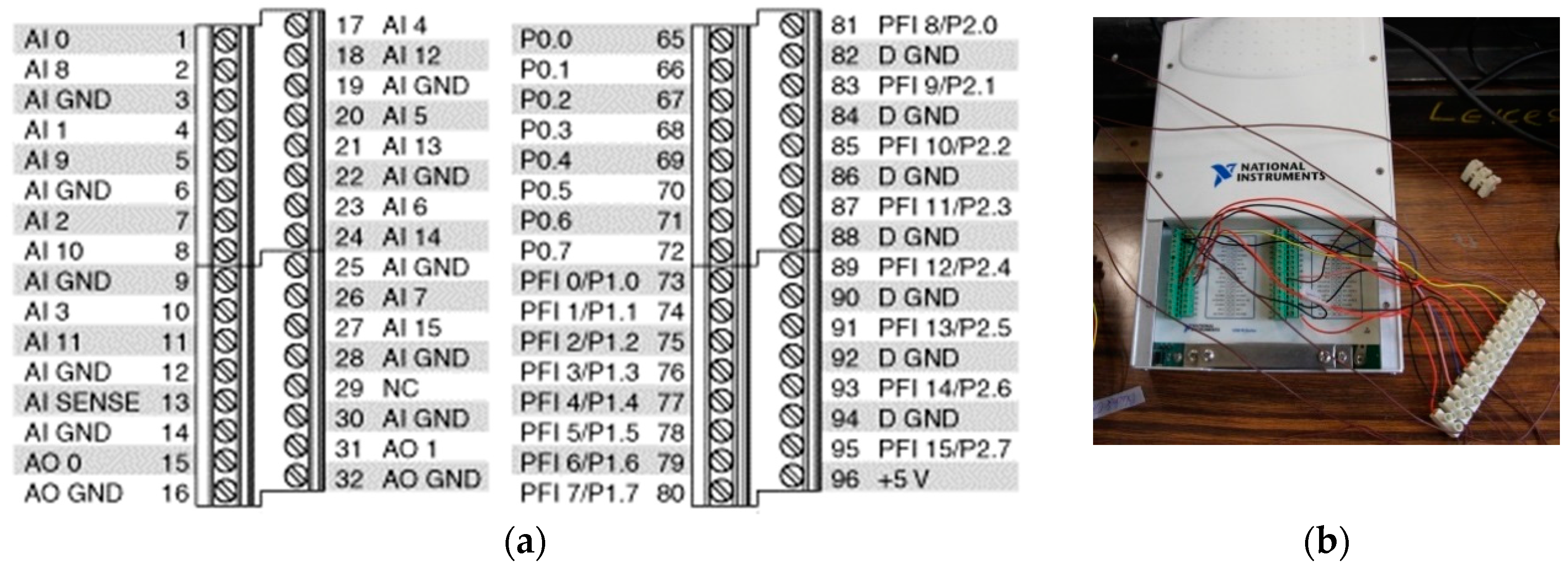
3.2.5. NI-DAQ Board
4. Results and Discussion
4.1. PI Gain-Tuning Experiment
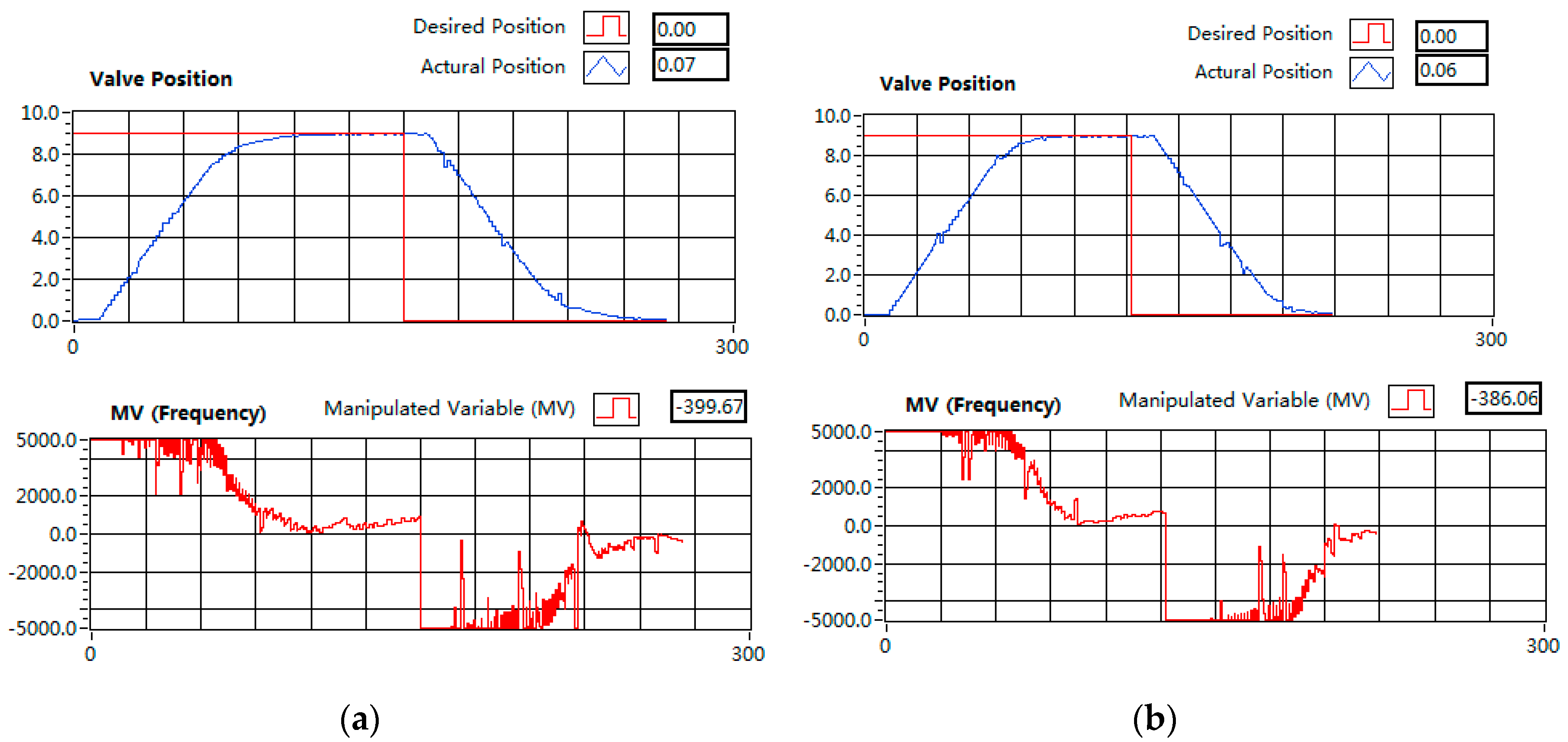
4.2. PI Control Experiment
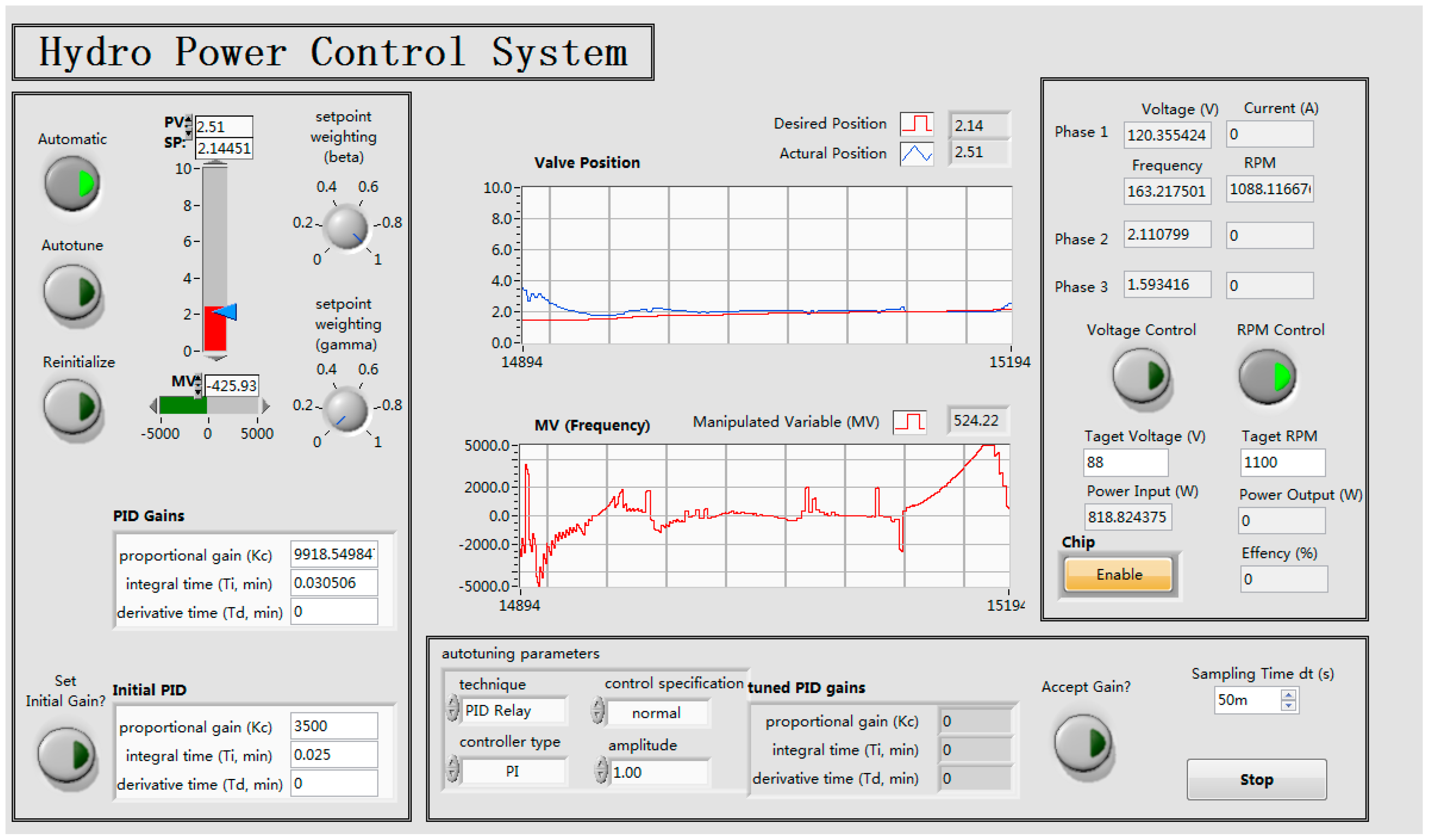
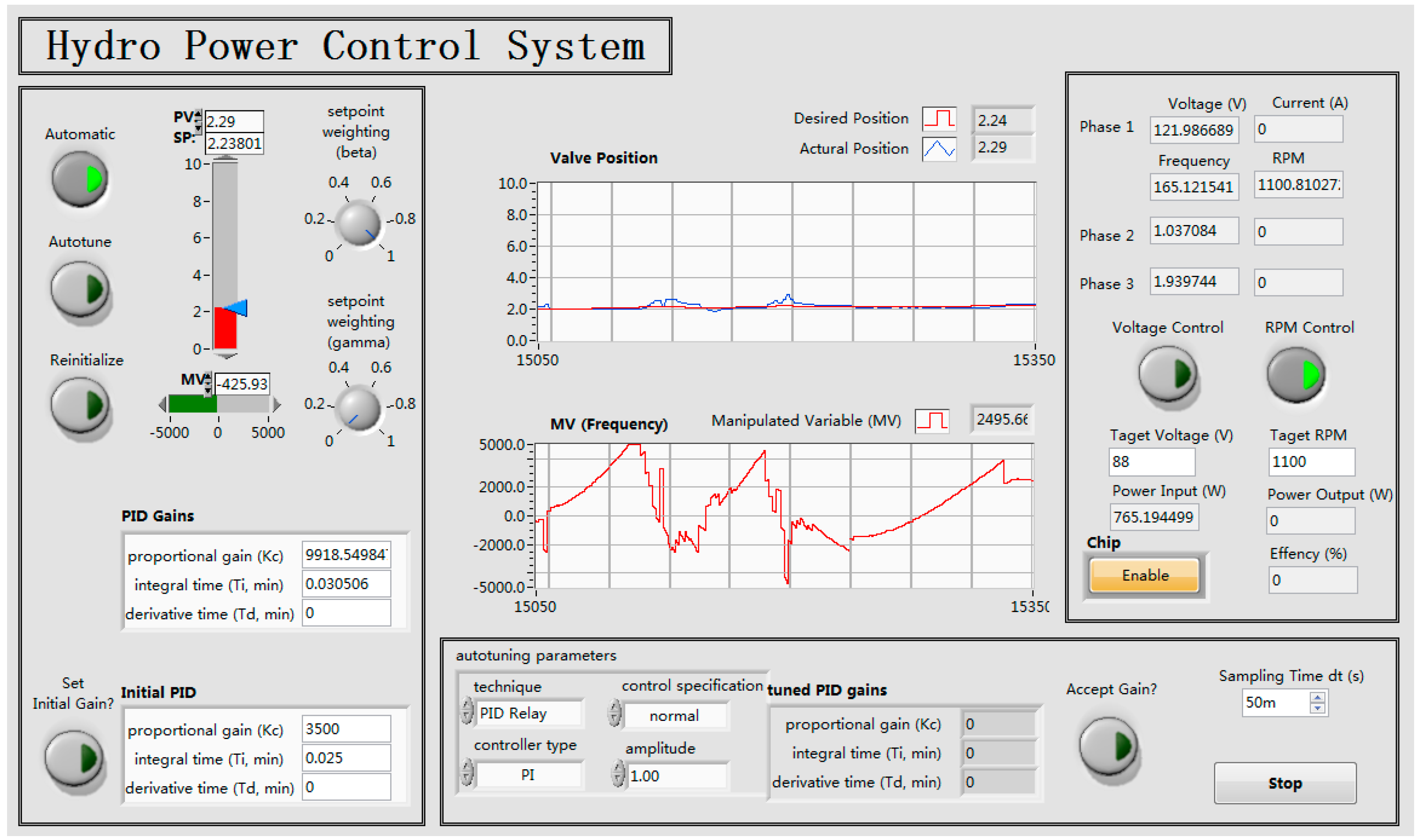
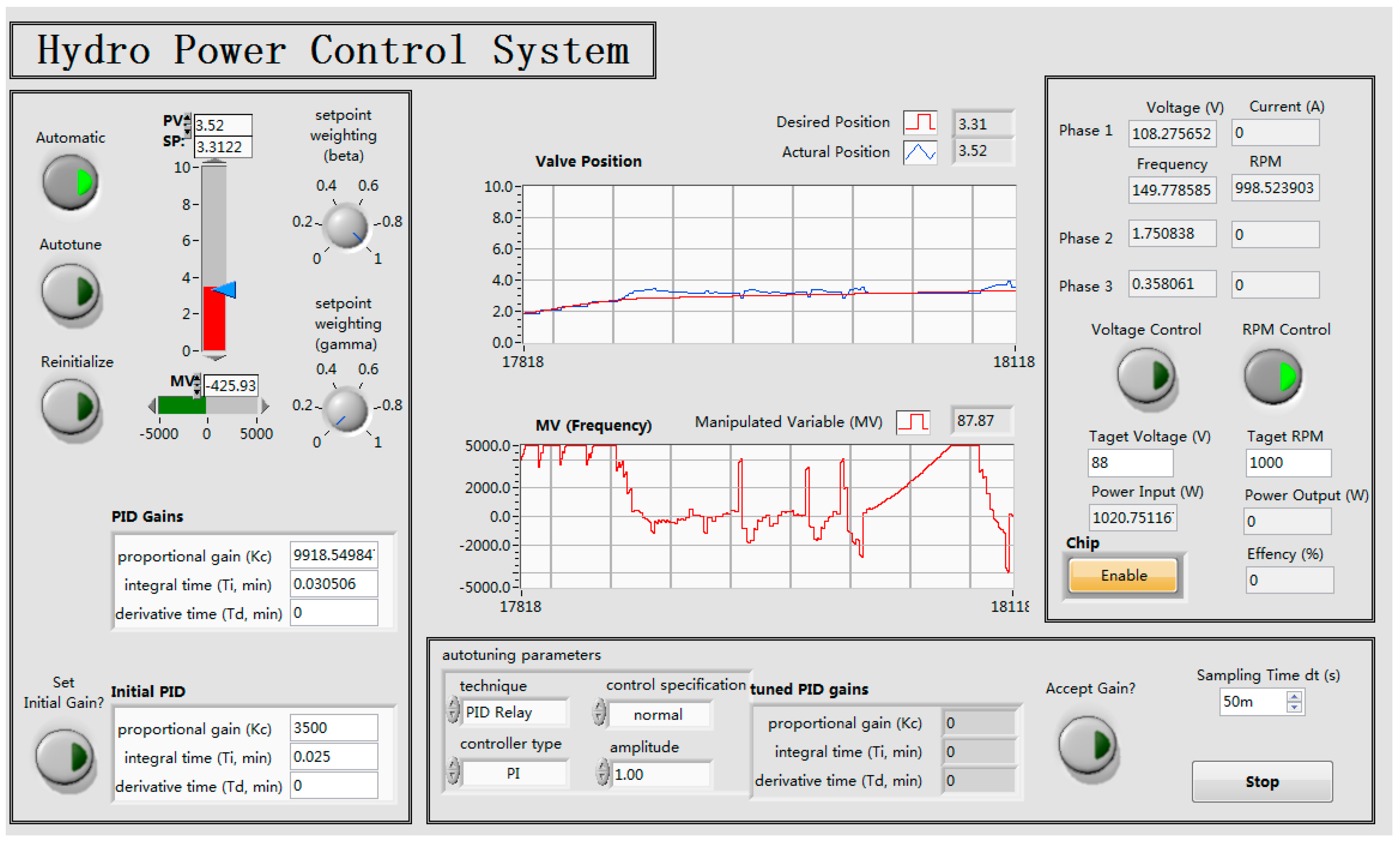
4.2.1. Frequency and RPM Control
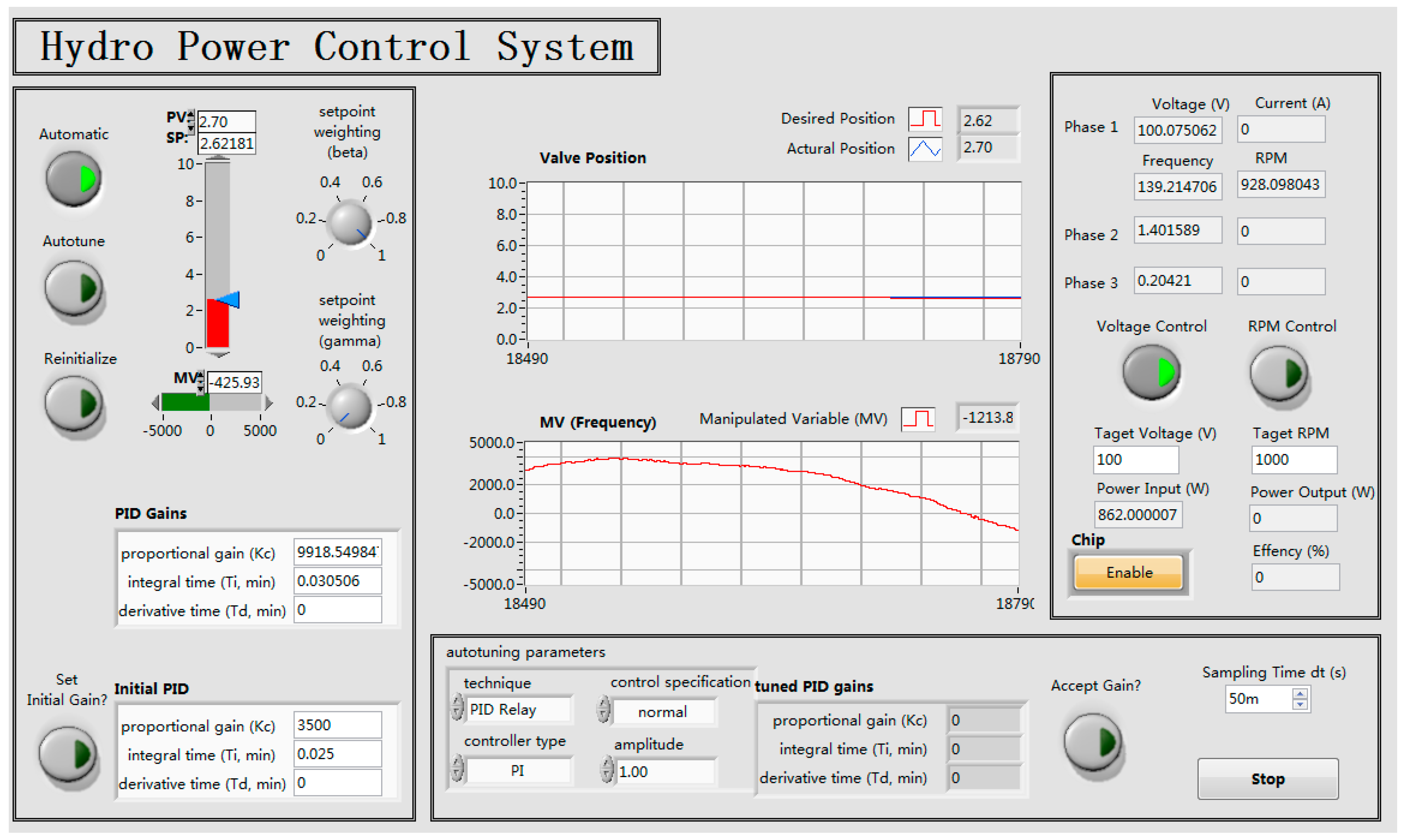
4.2.2. Voltage Control
5. Conclusions and Future Work
- A stepper motor system has been designed to control the valve of the turbine.
- A LabVIEW program has been built to control the stepper motor.
- An autotuning PI arithmetic-based controller has been implemented in order to obtain optimal PI gains automatically.
- The system can control a certain variable of the output power at different upstream water flow and electrical load conditions. These include:
- Maintaining the frequency by automatic regulation of the turbine valve.
- Maintaining the voltage by automatic regulation of the turbine valve.
- Searching for the maximum efficiency point by automatic regulation of the turbine valve and manually entering the output current into the program.
- An online adaptive arithmetic-based controller could be applied to the control system for variable PI gains, and then the control system could determine the time needed to obtain a new PI gain while the water flow condition fluctuates.
- Searching for the maximum energy integrated into the power system.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bilgili, M.; Bilirgen, H.; Ozbek, A.; Ekinci, F.; Demirdelen, T. The role of hydropower installations for sustainable energy development in turkey and the world. Renew. Energy 2018, 126, 755–764. [Google Scholar] [CrossRef]
- Hennig, T.; Harlan, T. Shades of green energy: Geographies of small hydropower in yunnan, china and the challenges of over-development. Glob. Environ. Chang. 2018, 49, 116–128. [Google Scholar] [CrossRef]
- Ioannidou, C.; O’Hanley, J.R. Eco-friendly location of small hydropower. Eur. J. Oper. Res. 2018, 264, 907–918. [Google Scholar] [CrossRef]
- Jurasz, J.; Ciapała, B. Solar–hydro hybrid power station as a way to smooth power output and increase water retention. Sol. Energy 2018, 173, 675–690. [Google Scholar] [CrossRef]
- Yao, W.; Chen, Y.; Yu, G.; Xiao, M.; Ma, X.; Lei, F. Developing a model to assess the potential impact of tum hydropower turbines on small river ecology. Sustainability 2018, 10, 1662. [Google Scholar] [CrossRef]
- Weng, H.; Lau, K.M.; Xue, Y. Multi-scale summer rainfall variability over china and its long-term link to global sea surface temperature variability. J. Meteorol. Soc. Jpn. Ser. II 1999, 77, 845–857. [Google Scholar] [CrossRef]
- Naumann, G.; Alfieri, L.; Wyser, K.; Mentaschi, L.; Betts, R.A.; Carrao, H.; Spinoni, J.; Vogt, J.; Feyen, L. Global changes in drought conditions under different levels of warming. Geophys. Res. Lett. 2018, 45, 3285–3296. [Google Scholar] [CrossRef]
- Paish, O. Small hydro power: Technology and current status. Renew. Sustain. Energy Rev. 2002, 6, 537–556. [Google Scholar] [CrossRef]
- Okafor, F.N.; Hofmann, W. Modelling and control of slip power recovery schemes for small hydro power stations. In Proceedings of the 2004 IEEE Africon. 7th Africon Conference in Africa (IEEE Cat. No.04CH37590), Gaborone, Botswana, 15–17 September 2004. [Google Scholar]
- Kaldellis, J.K.; Vlachou, D.S.; Korbakis, G. Techno-economic evaluation of small hydro power plants in greece: A complete sensitivity analysis. Energy Policy 2005, 33, 1969–1985. [Google Scholar] [CrossRef]
- Mohibullah, M.; Radzi, A.M.; Hakim, M.I.A. Basic design aspects of micro hydro power plant and its potential development in Malaysia. In Proceedings of the National Power and Energy Conference, Kuala Lumpur, Malaysia, 29–30 November 2004. [Google Scholar]
- Cheng, C.; Liu, B.; Chau, K.W.; Li, G.; Liao, S. China’s small hydropower and its dispatching management. Renew. Sustain. Energy Rev. 2015, 42, 43–55. [Google Scholar] [CrossRef]
- Belhadji, L.; Bacha, S.; Roye, D. Modeling and control of variable-speed micro-hydropower plant based on axial-flow turbine and permanent magnet synchronous generator (MHPP-PMSG). In Proceedings of the IECON 2011—37th Annual Conference of the IEEE Industrial Electronics Society, Melbourne, Australia, 7–10 November 2011. [Google Scholar]
- Márquez, J.L.; Molina, M.G.; Pacas, J.M. Dynamic modeling, simulation and control design of an advanced micro-hydro power plant for distributed generation applications. Int. J. Hydrogen Energy 2010, 35, 5772–5777. [Google Scholar] [CrossRef]
- Bansal, R.C.; Bhatti, T.S.; Kothari, D.P. Bibliography on the application of induction generators in nonconventional energy systems. IEEE Trans. Energy Convers. 2003, 18, 433–439. [Google Scholar] [CrossRef]
- Travis, J.; Kring, J. Labview for Everyone: Graphical Programming Made Easy and Fun, 3rd ed.; Prentice-Hall: Upper Saddle River, NJ, USA, 2007; ISBN 0131856723. [Google Scholar]
- Skogestad, S.; Postlethwaite, I. Multivariable Feedback Control: Analysis and Design, 2nd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2007; Volume 2, ISBN 0-470-01167-X. [Google Scholar]
- Smith, C.A. Automated Continuous Process Control; John Wiley & Sons: Hoboken, NJ, USA, 2003; ISBN 0471459267. [Google Scholar]
- National Instruments. LabVIEW 2012 PID and Fuzzy Logic Toolkit Help. Available online: http://zone.ni.com/reference/en-XX/help/370401J-01/ (accessed on 24 October 2018).
- Åström, K.J.; Hägglund, T. Automatic tuning of simple regulators with specifications on phase and amplitude margins. Automatica 1984, 20, 645–651. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control | Voltage Range | Performance | Value |
|---|---|---|---|
| Analog input | 0–10 V | accuracy | 3230 µV |
| Analog output | 0–10 V | drive current | 5 mA |
| Digital input | 0–5 V | max clock rate | 1 MHz |
| Digital output | 0–5 V | drive current | 24 mA |
| Control | Performance | P | I | D |
|---|---|---|---|---|
| P | Fast | 0.50 | - | - |
| Normal | 0.20 | - | - | |
| Slow | 0.13 | - | - | |
| PI | Fast | 0.40 | 0.8 | - |
| Normal | 0.18 | 0.8 | - | |
| Slow | 0.13 | 0.8 | - | |
| PID | Fast | 0.60 | 0.5 | 0.12 |
| Normal | 0.25 | 0.5 | 0.12 | |
| Slow | 0.15 | 0.5 | 0.12 |
| MS1 | MS2 | MS3 | Microstep Resolution | |
|---|---|---|---|---|
| Low | Low | Low | Full Step | 1/1 |
| High | Low | Low | Half Step | 1/2 |
| Low | High | Low | Quarter Step | 1/4 |
| High | High | Low | Eighth Step | 1/8 |
| High | High | High | Sixteenth Step | 1/16 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, Y.; Zhang, D.; Li, J. A Control Scheme for Variable-Speed Micro-Hydropower Plants. Sustainability 2018, 10, 4333. https://doi.org/10.3390/su10114333
Fan Y, Zhang D, Li J. A Control Scheme for Variable-Speed Micro-Hydropower Plants. Sustainability. 2018; 10(11):4333. https://doi.org/10.3390/su10114333
Chicago/Turabian StyleFan, Youping, Dai Zhang, and Jingjiao Li. 2018. "A Control Scheme for Variable-Speed Micro-Hydropower Plants" Sustainability 10, no. 11: 4333. https://doi.org/10.3390/su10114333
APA StyleFan, Y., Zhang, D., & Li, J. (2018). A Control Scheme for Variable-Speed Micro-Hydropower Plants. Sustainability, 10(11), 4333. https://doi.org/10.3390/su10114333