Mathematical Model of the Plane-Parallel Movement of the Self-Propelled Root-Harvesting Machine


 ,
,  and
and 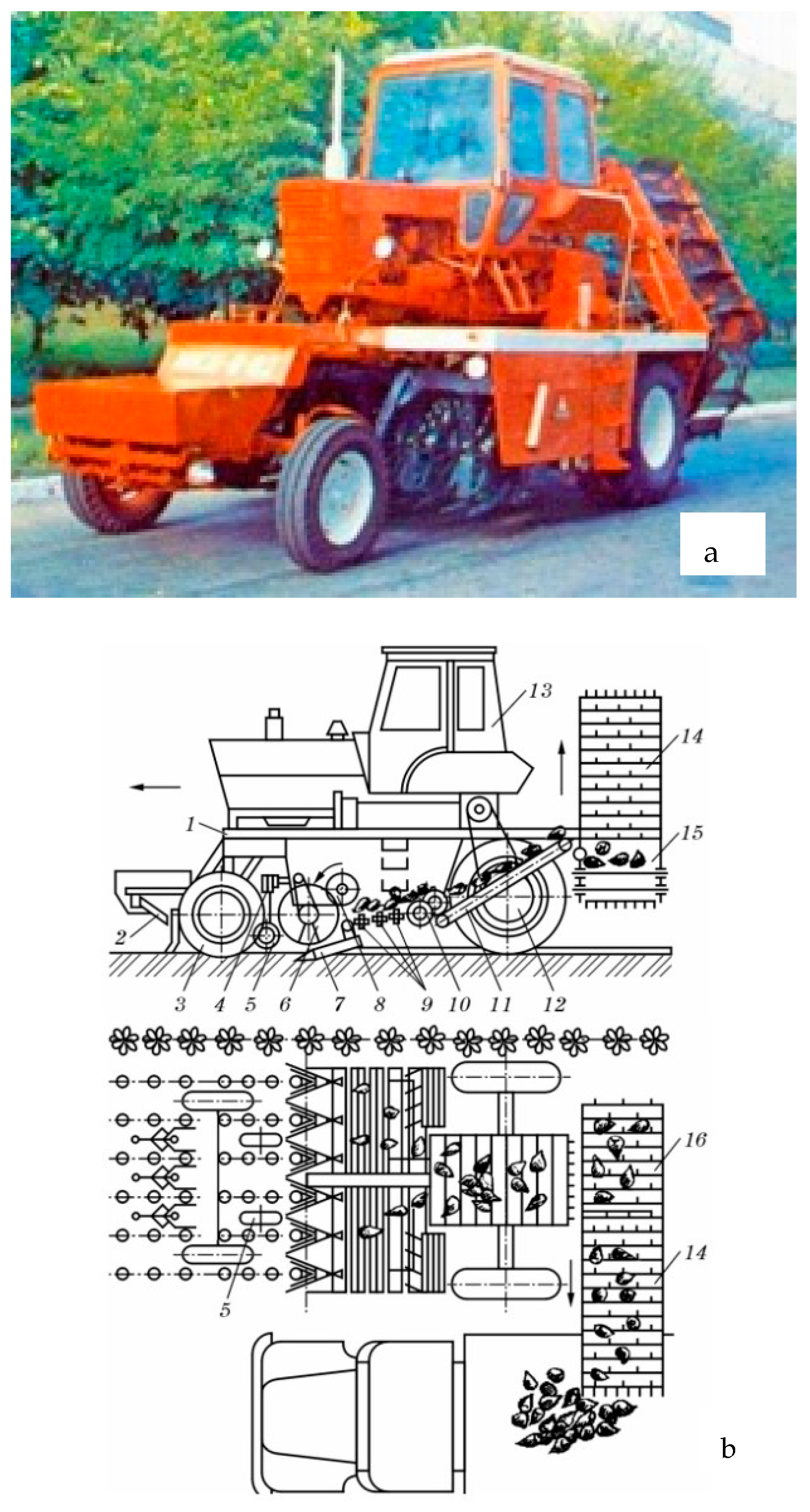{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Theoretical Research
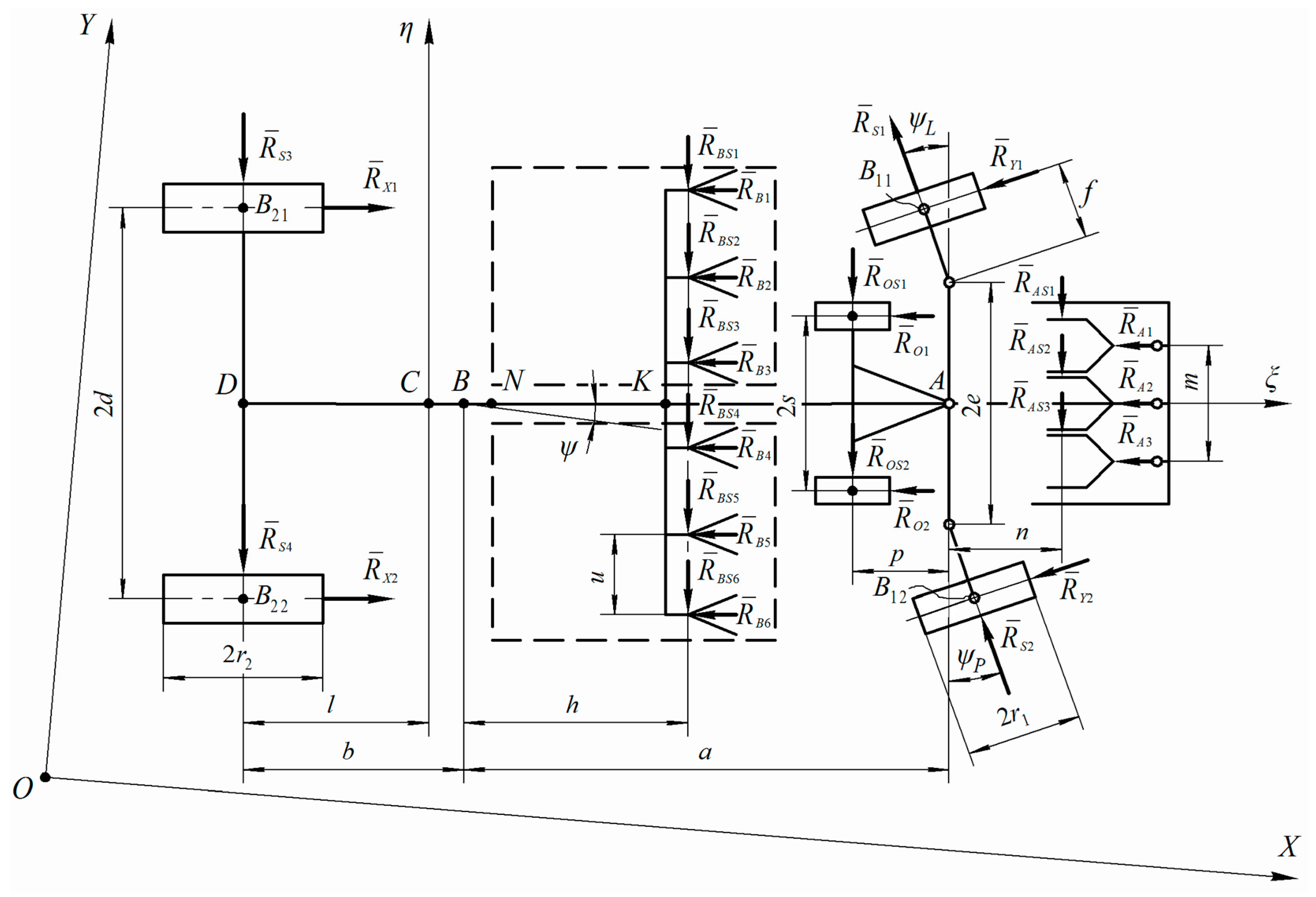
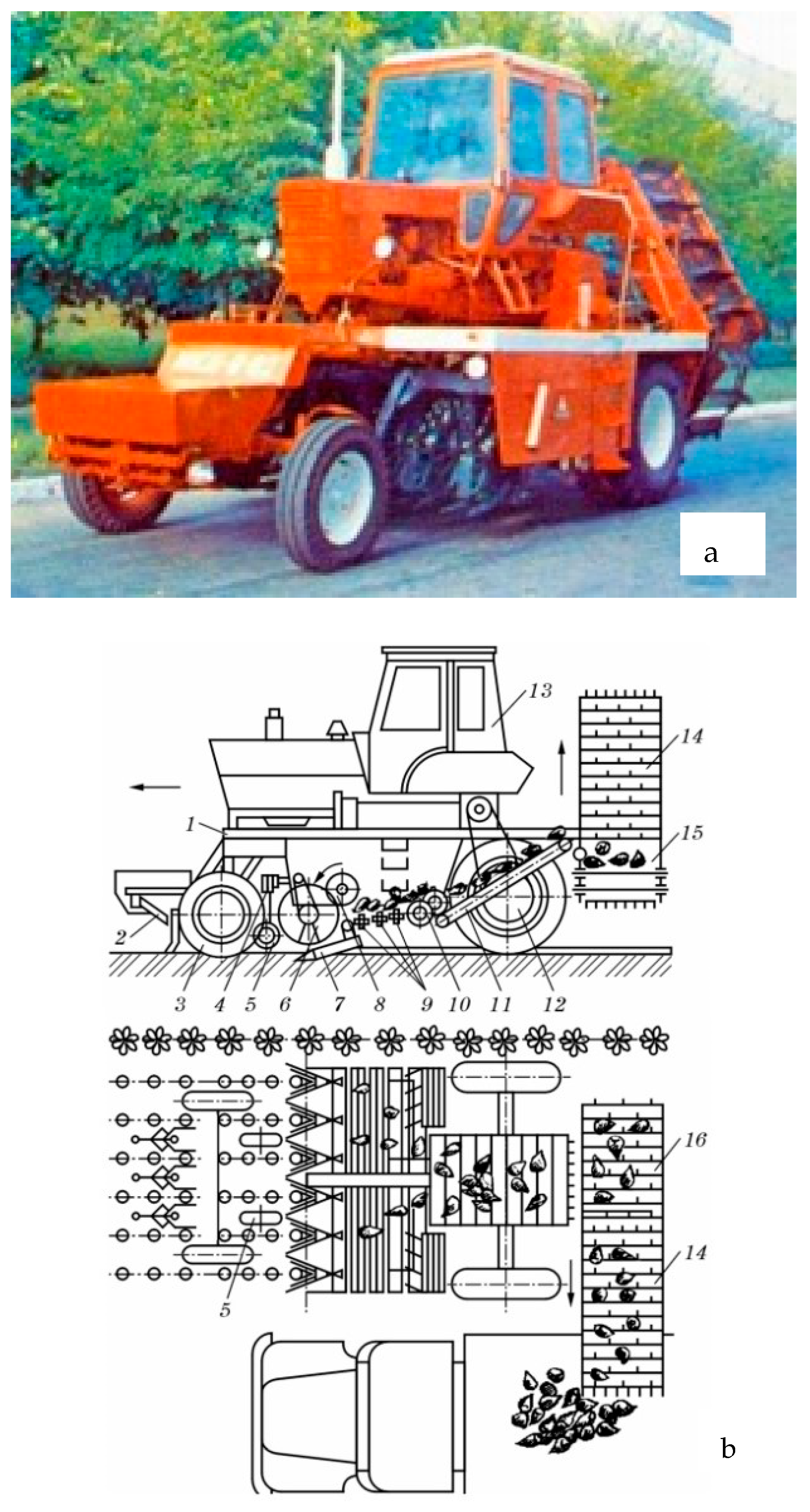
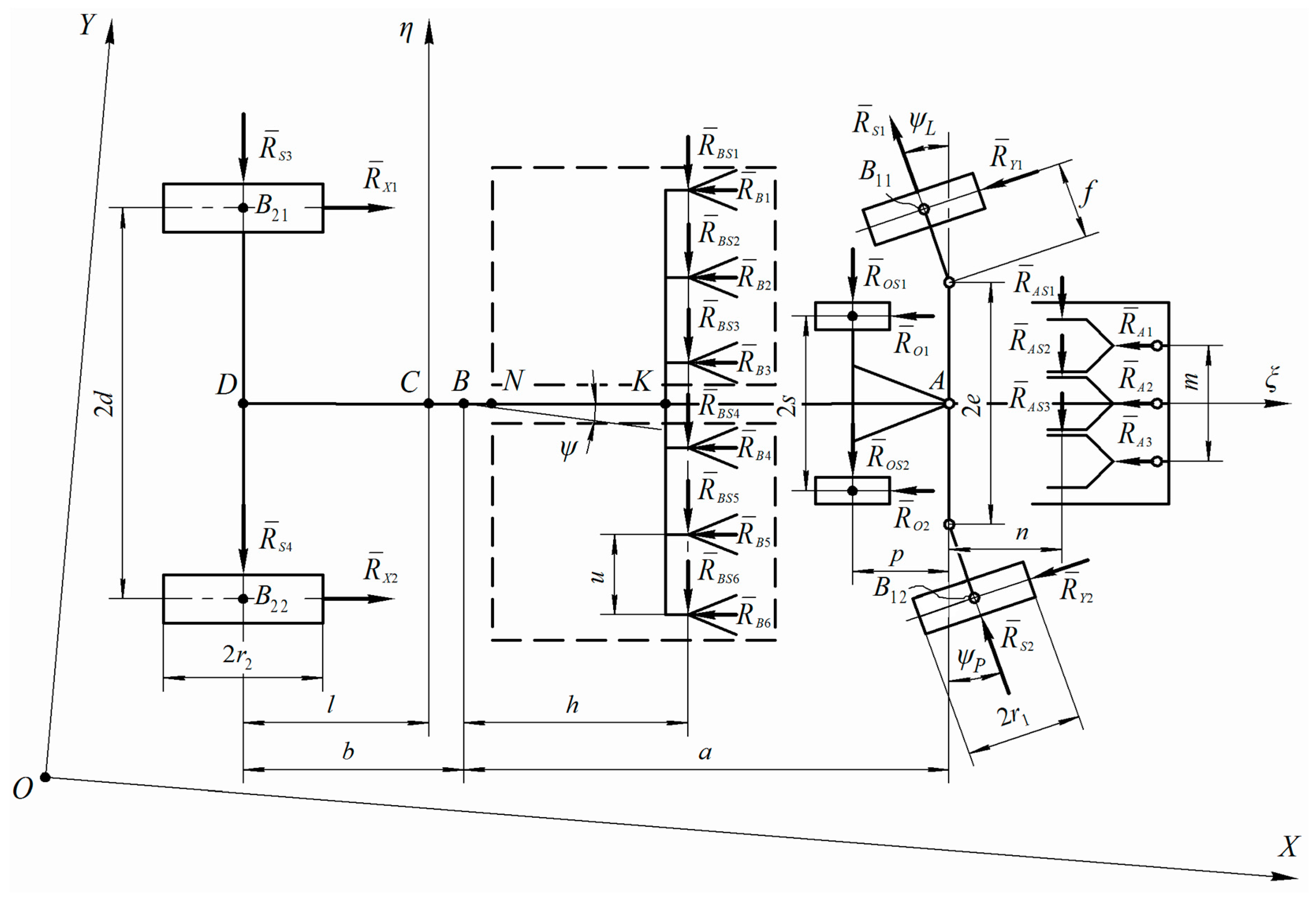
2.1.1. Equivalent Scheme of a Self-Propelled Root Harvesting Machine
2.1.2. Mathematical Model
2.2. Experimental Tests
3. Results and Discussion
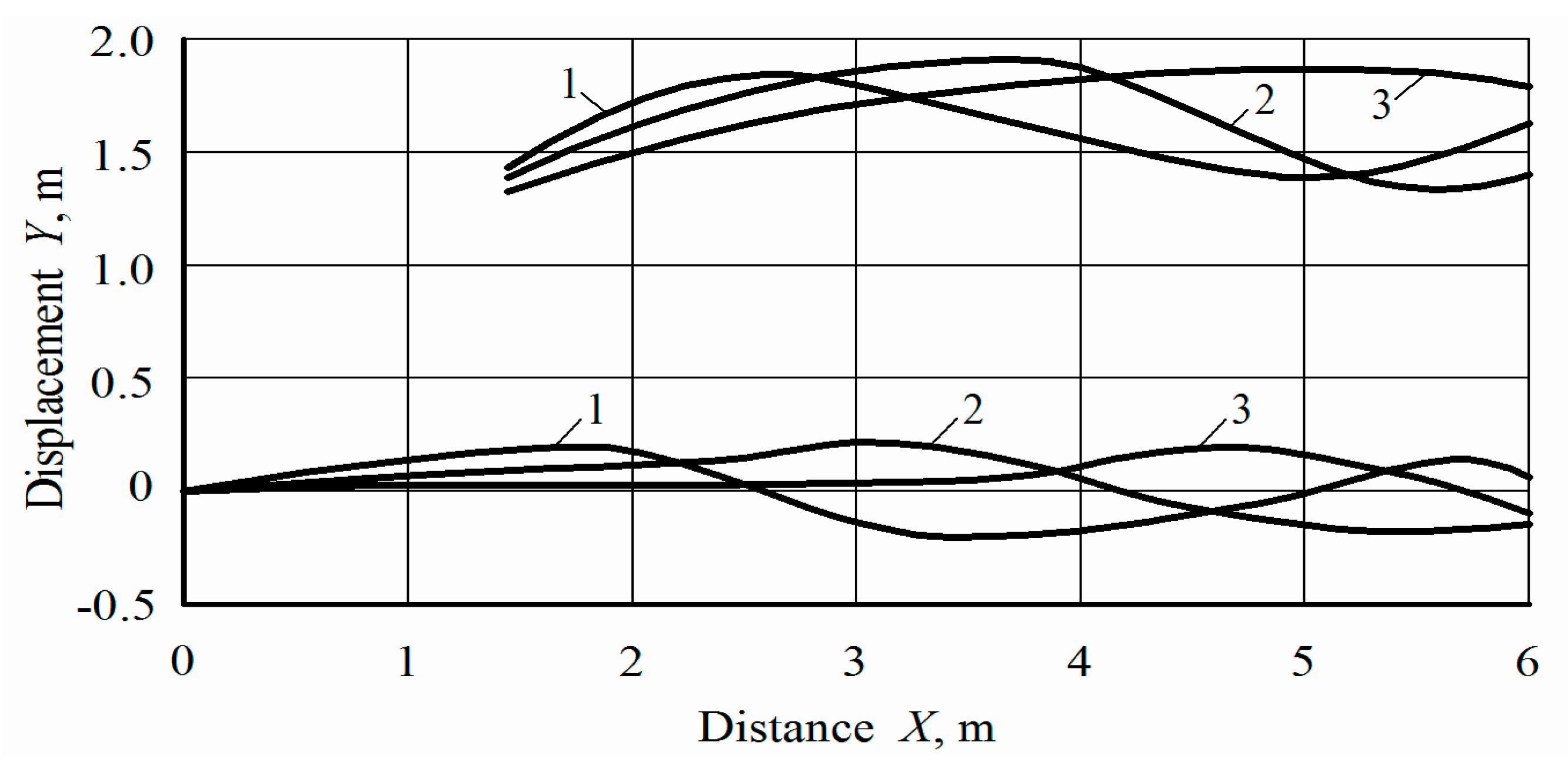
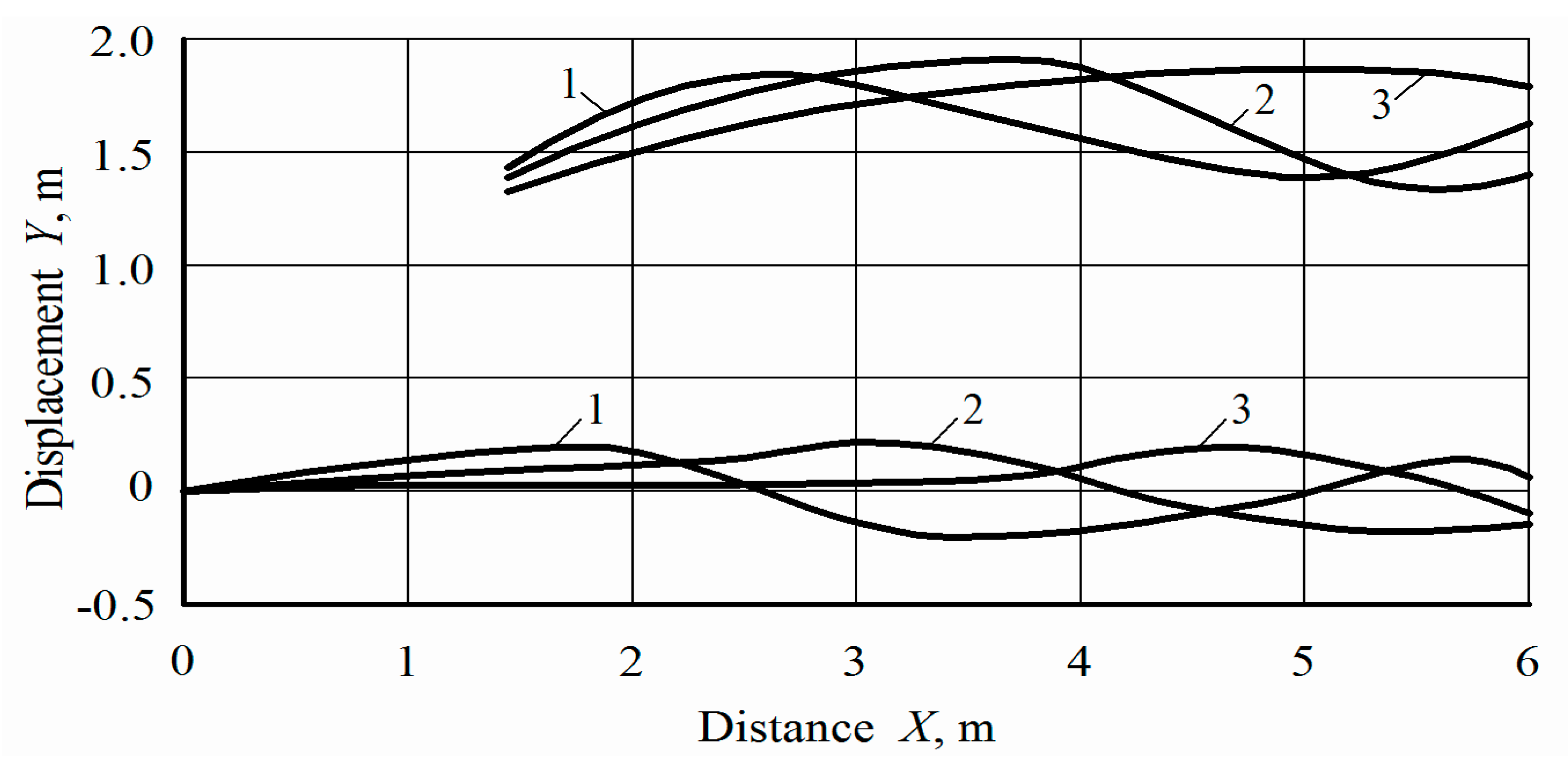
3.1. Numerical Results
3.2. Experimental Results
4. Conclusions
- It was determined that the dynamic system of the self-propelled harvesting aggregate can be considered as conservative with practically absent dissipative processes.
- Since the self-propelled root harvester is a complex, multi-mass dynamic system, the method of compiling systems of differential equations in the Lagrange form of the second kind is most suitable for investigating the motion of such a system. The resulting system of second-degree differential equations is nonlinear, the solution of which is produced by numerical methods on the PC. The obtained system of differential equations contains constructive parameters of the root-harvesting machine. By changing these parameters, it is possible to achieve such values that will contribute to a more stable movement of the self-propelled root crop machine in the horizontal plane.
- The use of the obtained mathematical model makes it possible to optimize the parameters of the plane-parallel motion and to improve the quality parameters of the technological process.
- Further analytical studies on this model can be focused on other solutions of this mathematical model of the PC, for cases when disturbing effects on the elements of a self-propelled root harvester can be represented in the form of statistical functions. The results obtained in the general form create prerequisites for the theoretical study of other mobile machine aggregates.
Author Contributions
Funding
Conflicts of Interest
Nomenclature
| B | center of mass of the root harvesting machine |
| C | pole (a fixed point on the machine body located on its longitudinal axis) |
| A, D | midpoints of the interaxial distances between the front driven and rear drive wheels, respectively |
| B11, B12, B21, B22 | centers of mass points of the front driven and rear drive wheels |
| N | intersection point of the suspension axis of the digging sections and the longitudinal axis of the machine |
| A | hinge point of the frame of the feeler wheels |
| AB = a | distance from the center of mass B to the front axle |
| DB = b | distance from the center of mass B to the rear axle |
| DC = l | distance from pole C to the rear axle |
| BK = h | distance from pole C to the axis of the suspension of the digging sections |
| p | distance from the front axle to the axis of the feeler wheels |
| n | distance from the front axle to the axis of the feelers |
| m | distance between the suspension points of the outside feelers |
| 2e | distance between the axis of turns of steerable wheels |
| u | distance between the axis of symmetry of neighboring excavating working bodies |
| f | length of the swivel pin of the steering gear |
| 2r1 and 2r2 | diameters of the steerable and driving wheels, respectively |
| 2d and 2s | width of the track of the driving and feeler wheels |
| AD = a + b | longitudinal base of root harvesting machine |
| JM | moment of inertia of the root harvesting machine relative to the vertical axis Cξ |
| M | mass of the root harvesting machine |
| Mres.rot. | torque moment of resistance |
| Mrot. | moment of forces turning the root harvesting machine through an angle |
| qi | generalized coordinates |
| Qi | generalized forces |
| Ry1, Ry2 | soil reactions acting on the steerable wheels |
| Rx1, Rx2 | soil reactions acting on the driving wheels |
| RO1, RO2 | soil reactions acting on the feeler wheels |
| RA1, RA2, RA3 | soil reactions acting on the feelers |
| RB1, RB2, …, RB6 | total resistance reactions during the movement of excavated working organs in the soil |
| RS1, RS2, RS3, RS4 | lateral reactions of the soil, acting on the steerable and driving wheels of the root-harvesting machine when moving along the axis Y |
| ROS1, ROS2 | lateral reactions of the soil, acting on the feeler wheels of the root-harvesting machine when moving along the axis Y |
| RBS1, RBS2, …, RBS6 | lateral reactions of the soil, acting on the digging working organs |
| RAS1, RAS2, RAS3 | lateral reactions of the soil, acting on the sensors of the feelers |
| T | energy of the system |
| T1 and T2 | kinetic energy, respectively, of the translational motion of the root harvesting machine and its rotation around the pole C |
| VB | velocity of the center of mass |
| heading angle | |
| and | angles to determine the orientation of the axes of the left and right steered wheels relative to the body of the machine |
| angular speed of rotation of the machine around the pole C | |
| δqi | variations of the corresponding generalized coordinates |
References
- Oshunsanya, S.O.; Yu, H.; Li, Y. Soil loss due to root crop harvesting increases with tillage operations. Soil Tillage Res. 2018, 181, 93–101. [Google Scholar] [CrossRef]
- Parlak, M.; Cicek, G.; Blano-Canqui, H. Celery harvesting causes losses of soil: A case study in Turkey. Soil Tillage Res. 2018, 180, 204–209. [Google Scholar] [CrossRef]
- Faraji, M.; Chakan, A.A.; Jafarizadeh, M.; Behbahani, A.M. Soil and nutrient losses due to root crops harvesting: A case study from Southwestern Iran. Arch. Agron. Soil Sci. 2017, 63, 1523–1534. [Google Scholar] [CrossRef]
- Dada, P.O.O.; Adeyanju, O.R.; Adeosun, O.J.; Adewumi, J.K. Effects of soil physical properties on soil loss due to manual yam harvesting under a sandy loam environment. Int. Soil Water Conserv. Res. 2016, 4, 121–125. [Google Scholar] [CrossRef]
- Yu, H.Q.; Li, Y.; Zhou, N.; Chappell, A.; Li, X.Y.; Poesen, J. Soil nutrient loss due to tuber crop harvesting and its environment impact in the North China Plain. J. Integr. Agric. 2016, 15, 1612–1624. [Google Scholar] [CrossRef]
- Oztas, T.; Ozbek, A.K.; Turan, M. The cost of soil lost from fields due to removal on harvested sugarbeet: A case study in Turkey. Soil Use Manag. 2002, 18, 236–237. [Google Scholar] [CrossRef]
- Parlak, M.; Palta, C.; Yokus, S.; Blanco-Canqui, H.; Carkaci, D.A. Soil losses due to carrot harvesting in south central Turkey. Catena 2016, 140, 24–30. [Google Scholar] [CrossRef]
- Pascuzzi, S.; Santoro, F. Analysis of the almond harvesting and hulling mechanization process: A case study. Agriculture (Switzerland) 2017, 7, 100. [Google Scholar] [CrossRef]
- Munoz-Romero, V.; Benitez-Vega, J.; Lopez-Bellido, R.; Fontan, J.; Lopez-Bellido, L. Effect of tillage system on the root growth of spring wheat. Plant Soil 2010, 326, 97–107. [Google Scholar] [CrossRef]
- Yeboah, S.; Lamptey, S.; Zhang, R.; Li, L.L. Conservation tillage practices optimize root distribution and straw yield of spring wheat and field pea in dry areas. J. Agric. Sci. 2017, 9, 37–47. [Google Scholar] [CrossRef]
- Schneider, F.; Don, A.; Hennings, I.; Schmittmann, O.; Seidel, J.S.J. The effect of deep tillage on crop yield —What do we really know? Soil Tillage Res. 2017, 174, 193–204. [Google Scholar] [CrossRef]
- Oshunsanya, S.O. Alternative method of reducing soil loss due to harvesting of sweet potato in Nigeria: A case study of low input agriculture. Soil Tillage Res. 2016, 158, 49–56. [Google Scholar] [CrossRef]
- Smirnov, G.A. Theory of Movement of Wheeled Vehicles; Mechanical Engineering: Moscow, Russia, 1990. [Google Scholar]
- Wong, J.Y. Theory of Ground Vehicles, 3rd ed.; Wong, J.Y., Ed.; John Wiley & Sons Inc.: Hoboken, NJ, USA, 2001. [Google Scholar]
- Vasilenko, P.M. About the Technique of Mechanical and Mathematical Research in the Development of Problems of Agricultural Machinery; BTI GOSNITI: Moscow, Russia, 1962. [Google Scholar]
- Zuev, N.M. Placement of root crops in rows and quality of harvesting. Sugar Beet 1980, 10, 24–29. [Google Scholar]
- Dreizler, R.M.; Ludde, C.S. Theoretical Mechanics; Springer: Berlin, Germany, 2010. [Google Scholar] [CrossRef]
- Bhatia, N.P.; Szegő, G.P. Stability Theory of Dynamical Systems; Springer: Berlin, Germany, 2002; ISBN 978-3-540-42748-3. [Google Scholar]
- Wu, D.H. A theoretical study of the yaw/roll motions of a multiple steering articulated vehicle. Proc. Inst. Mech. Eng. Part D J. Autom. Eng. 2001, 215, 1257–1265. [Google Scholar] [CrossRef]
- Anifantis, A.S.; Colantoni, A.; Pascuzzi, S. Thermal energy assessment of a small scale photovoltaic, hydrogen and geothermal stand-alone system for greenhouse heating. Renew. Energy 2017, 103, 115–127. [Google Scholar] [CrossRef]
- Vanessa, M.D.; Johannes, A.P.; Andrea, S.; Loic, P.; Mathieu, J.; Lianhai, W. Modeling root-soil interactions using three-dimensional models of root growth, architecture and function. Plant Soil 2013, 372, 93–124. [Google Scholar]
- Vasilenko, P.M.; Vasilenko, V.P. Method for Constructing Computational Models for the Operation of Mechanical Systems (Machines and Machine Aggregates); USHA: Kiev, Ukraine, 1980. [Google Scholar]
- Lurie, A.I. Analytical Mechanics; Springer: Berlin/Heidelberg, Germany, 2002; ISBN 978-3-540-42982-1. [Google Scholar]
- Bulgakov, V.; Pascuzzi, S.; Ivanovs, S.; Kaletnik, G.; Yanovich, V. Angular oscillation model to predict the performance of a vibratory ball mill for the fine grinding of grain. Biosyst. Eng. 2018, 171, 155–164. [Google Scholar] [CrossRef]
- Pascuzzi, S.; Anifantis, A.S.; Blanco, I.; Scarascia Mugnozza, G. Electrolyzer performance analysis of an integrated hydrogen power system for greenhouse heating a case study. Sustainability 2016, 8, 629. [Google Scholar] [CrossRef]
- Forsythe, G.F.; Malcolm, M.A.; Moler, C.B. Computer Methods for Mathematical Calculations; Prentice Hall Professional Technical Reference; Prentice Hall: Upper Saddle River, NJ, USA, 1977; ISBN 0131653326. [Google Scholar]

© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bulgakov, V.; Pascuzzi, S.; Santoro, F.; Anifantis, A.S. Mathematical Model of the Plane-Parallel Movement of the Self-Propelled Root-Harvesting Machine. Sustainability 2018, 10, 3614. https://doi.org/10.3390/su10103614
Bulgakov V, Pascuzzi S, Santoro F, Anifantis AS. Mathematical Model of the Plane-Parallel Movement of the Self-Propelled Root-Harvesting Machine. Sustainability. 2018; 10(10):3614. https://doi.org/10.3390/su10103614
Chicago/Turabian StyleBulgakov, Volodymyr, Simone Pascuzzi, Francesco Santoro, and Alexandros Sotirios Anifantis. 2018. "Mathematical Model of the Plane-Parallel Movement of the Self-Propelled Root-Harvesting Machine" Sustainability 10, no. 10: 3614. https://doi.org/10.3390/su10103614
APA StyleBulgakov, V., Pascuzzi, S., Santoro, F., & Anifantis, A. S. (2018). Mathematical Model of the Plane-Parallel Movement of the Self-Propelled Root-Harvesting Machine. Sustainability, 10(10), 3614. https://doi.org/10.3390/su10103614