1. Introduction
Hazardous materials can be toxic, corrosive, inflammable, and explosive, but also are necessary for the development of industry and agriculture. How to choose one or more transportation routes for hazardous materials with low energy consumption and low risk has become a very important topic with practical significance to ensure personal, property, and environmental security as well as economic sustainability.
According to statistics, the daily amount of hazardous materials being transported in China exceeds 1 million tons, and the total amount per year exceeds 400 million tons [
1]. These large quantities of hazardous materials form a dangerous flowing source on the roads. If an accident occurs, it could cause damage to nearby people and the surrounding environment. Alp et al. [
2] studied the effects of meteorologic conditions and wind direction probabilities on the consequences of accidents, and proposed a three-integral mathematical evaluation model for calculating individual and social risks. Leonelli et al. [
3] proposed a new personal and social risk assessment model, introducing risk factors such as transportation mode, hazardous materials category, meteorologic conditions, wind direction probability, and seasonal attributes, and considered the impact of population distribution, which greatly improved the accuracy of risk assessment for hazardous materials transportation. Based on a statistical analysis of accidents, Fabiano et al. [
4] discussed risk factors from the aspects of road characteristics, weather conditions, and traffic conditions, and proposed a risk assessment model for the hazardous materials transportation process at accident sites. Based on the route segment–specific (location-specific) accident rate, Chakrabarti et al. [
5] estimated route segment total risk to measure the average number of persons likely to be exposed to all possible consequence scenarios by computing and comparing the loss of containment and spillage probabilities for different route segments. Taking the length and quality of roads, the population density in different segments of the roads, types of hazardous materials, and types of vehicles into consideration, Faghih-Roohi et al. [
6] proposed a dynamic value-at-risk model. Mohammadi et al. [
7] designed a reliable hazardous materials transportation network based on four factors: distance from the incident source, number of people exposed to the risk, number of hazardous materials shipments passing that segment, and the characteristics of the road type. With the rapid development of Geographic Information System (GIS) technology, it has also been applied to risk assessment for hazardous materials transportation (Bubbico et al. [
8], Sahnoon et al. [
9], Chen et al. [
10]). Visual map display and data analysis functions provide convenience and improve accuracy for risk assessment during the transportation of hazardous materials. It can be seen that scholars have made many contributions to the problem of transporting hazardous materials. The risk of transporting hazardous materials is related to many uncertain factors, and it is difficult to measure accurately, but it is still a factor that must be considered.
In addition to risk, energy consumption is also an important factor to consider in reducing the transportation costs of enterprises, reducing carbon emissions, and achieving sustainable development of hazardous materials transportation. There are many factors that affect transportation energy consumption, but they can be roughly classified into categories such as vehicle construction, transportation environment, and driver strategies. Factors influencing fuel consumption have been studied by Bigazzi et al. [
11], Demir et al. [
12], and Suzuki [
13]. Trucks have to overcome various obstacles while transporting hazardous materials, such as speed, road gradient, and payload. These are key factors that affect energy consumption. Bektaş and Laporte [
14] analyzed the relationship between vehicle load, speed, and total cost, and proposed that minimizing the cumulative load alone does not necessarily lead to energy minimization, particularly when there are time window restrictions. Demir et al. [
15] derived an optimum driving speed and showed that reductions in emissions could be achieved by varying speed over a network. It should be noted that the optimum driving speed varies to a certain degree between geographic areas due to speed limits and traffic density. Given the fact that the shortest distance may not be the optimal solution for the purpose of lowering fuel consumption, Xiao et al. [
16] developed route schedules with lower fuel costs by better managing the trade-off between the total distance and the priority of serving customers with larger demands. Suzuki [
17] indicated that significant savings in fuel consumption may be realized by delivering heavy items in the early segments of a tour and lighter items in the later segments. In fact, transportation costs are more related to energy consumption than distance. Therefore, for hazardous materials transportation, considering the factors that affect energy consumption, it is more practical to find one or more low-energy vehicle routes as the optimization objective.
The transportation route is a key factor to guarantee that hazardous materials are transported safely and economically, which many experts and scholars have been studying. Batta et al. classified transportation risk into road risk and node risk [
18]. Karkazis et al. [
19] formulated the routing problem of transporting hazardous materials as an optimization problem, with the objective of minimizing transportation risk and costs. Meng et al. [
20] used the dynamic programming method to solve the transportation route optimization problem. Liu et al. [
21] applied a multilevel fuzzy comprehensive evaluation method to optimizing hazardous materials transportation routing. Das et al. [
22] explored the routing problem in a transportation network with the capacity limit, and developed a multi-objective algorithm to find nondominated solutions. Pradhananga et al. [
23] chose minimum transportation time and risk as the optimization objective to search for Pareto optimal solutions. Given the unscientific nature of simply evaluating the total risk of a fleet as a whole without considering individual vehicle risk, Wang et al. [
24] developed a two-stage exact algorithm based on the ε-constraint method to solve the proposed problem. Alrukaibi et al. [
25] designed a risk/cost algorithm using available data from Kuwait. For their study, incident probability, incident consequence, and risk assessment were used as the algorithm’s main criteria to identify available alternative routes. Mohammadi et al. [
7] proposed a mathematical model for designing a reliable hazardous materials transportation network on the basis of hub location topology under uncertainties; to cope with the uncertainties, they provided a solution framework based on an integration of the chance-constrained programming approach. Obviously, these studies on the routing problem of hazardous materials transportation have been relatively sufficient, and have gone through a study process from a single objective to multi-objective optimization and from certain to uncertain environments. However, energy consumption is not considered in the model, and to solve the model, most studies turned the multi-objective model into a single objective, and finally got an optimal solution instead of the Pareto optimal solution set.
All of the above studies on the vehicle routing problem (VRP) for hazardous materials transportation assumed that there was only one depot. However, there may, in fact, be more than one vehicle depot in a city, and it is of more practical significance to study the VRP with multiple depots for hazardous materials transportation. At present, only a few studies have focused on the multi-depot vehicle routing problem (MDVRP) for hazardous materials transportation. Zhao et al. [
26] considered the return trips between collection centers and recycling centers, and developed a multi-objective model with minimization of cost and risk. This optimization problem with two objectives was then transformed into a single objective problem. Du et al. [
27] developed a fuzzy bilevel programming model in which the upper-level formulation allocated customers to depots and the lower level determined the optimal routing for each depot. However, the study only considered transportation risk minimization as the optimization objective. In fact, for hazardous materials transportation, in addition to risk, energy consumption is also a major factor that must be considered. This is mainly due to the fact that energy consumption is a key factor in reducing the transportation costs of enterprises, reducing carbon emissions, and achieving sustainable development. To this end, this study aims to find the optimal vehicle routings for the MDVRP considering both transportation risk and energy consumption.
Many heuristic methods have been developed in the context of the VRP, including the tabu search algorithm [
28], the genetic algorithm [
29], the ant colony algorithm [
30], and so on. Compared to the VRP, the MDVRP is more complicated, because it needs to consider which customer point should be serviced by which depot, in addition to considering the vehicle routing for each depot. It is necessary to coordinate the delivery tasks among multiple depots. Gillett and Johnson presented a clustering procedure and a sweep heuristic for each depot [
31]. Salhi and Sari proposed a multilevel heuristic method [
32]. Giosa et al. [
33] summarized and proposed a number of heuristics for the two-stage approach to solving the MDVRP. In order to solve the emergency vehicle routing problem with multiple depots, Qin et al. [
34] divided it into two steps, and used the nearest assignment and average distance method to transform the MDVRP into multiple VRPs with a single depot in the first step, and then adopted a genetic algorithm to solve the VRPs with a single depot in the second step. Ho et al. [
35] developed two hybrid genetic algorithms. The major difference between the two algorithms is that the initial solutions were generated randomly in the first algorithm, and the initialization procedure was incorporated into the Clarke and Wright savings method and the nearest neighbor heuristic in another algorithm. In summary, the methodologies for MDVRP can be categorized into one-stage and two-stage solving methods.
To sum up, a number of studies have explored the traditional VRP with only one depot. These studies move from single objective optimization to multi-objective optimization and from single solution to a nondominated solution set. However, only a few studies have focused on the MDVRP for hazardous materials transportation, and all of them consider a single objective or do not consider transportation energy consumption, due to the complexity of the problem. Furthermore, these studies rarely consider all depots and customer points to find the optimal Pareto solution set to reduce both transportation risk and energy consumption. The existing research has mainly adopted the two-stage method, which cannot make multiple depots coordinate transportation and dynamically solve the problem. In addition, the existing research only considers one objective or converts multiple objectives into one to solve the problem, and they rarely use multi-objective algorithms to seek an optimal Pareto solution set. Different from the current studies on the MDVRP for hazardous materials transportation, this study aims to obtain the Pareto optimal solution set of noncomparable transportation risk and energy consumption. Finally, a two-stage algorithm (TSM) and a one-stage hybrid multi-objective genetic algorithm (HMOGA) are designed, and the solution optimality between these two algorithms is compared and analyzed.
The rest of this paper is organized as follows:
Section 2 describes the MDVRP for hazardous materials transportation,
Section 3 establishes an optimization model to minimize transportation risk and energy consumption,
Section 4 presents a TSM and HMOGA to solve the proposed model,
Section 5 gives numerical examples to analyze the effectiveness of the above two algorithms, and
Section 6 gives conclusions.
2. Problem Description
As the name implies, the VRP for hazardous materials transportation with one depot is a problem of vehicle scheduling for a specific depot. All customer points are served by a specific depot. However, in reality, it is very common that multiple depots coordinate the transportation and distribution of hazardous materials. The MDVRP for hazardous materials transportation can be defined as the following:
- (1)
There exist several hazardous materials depots, and each depot has enough vehicles to transport the hazardous materials.
- (2)
Multiple customer points exist and will be assigned to different depots.
- (3)
Each vehicle will service the corresponding customer points and can service several customer points, while each customer point can be serviced only one time by one vehicle.
- (4)
After the delivery task is finished, all transportation vehicles will return to their hazardous materials depot.
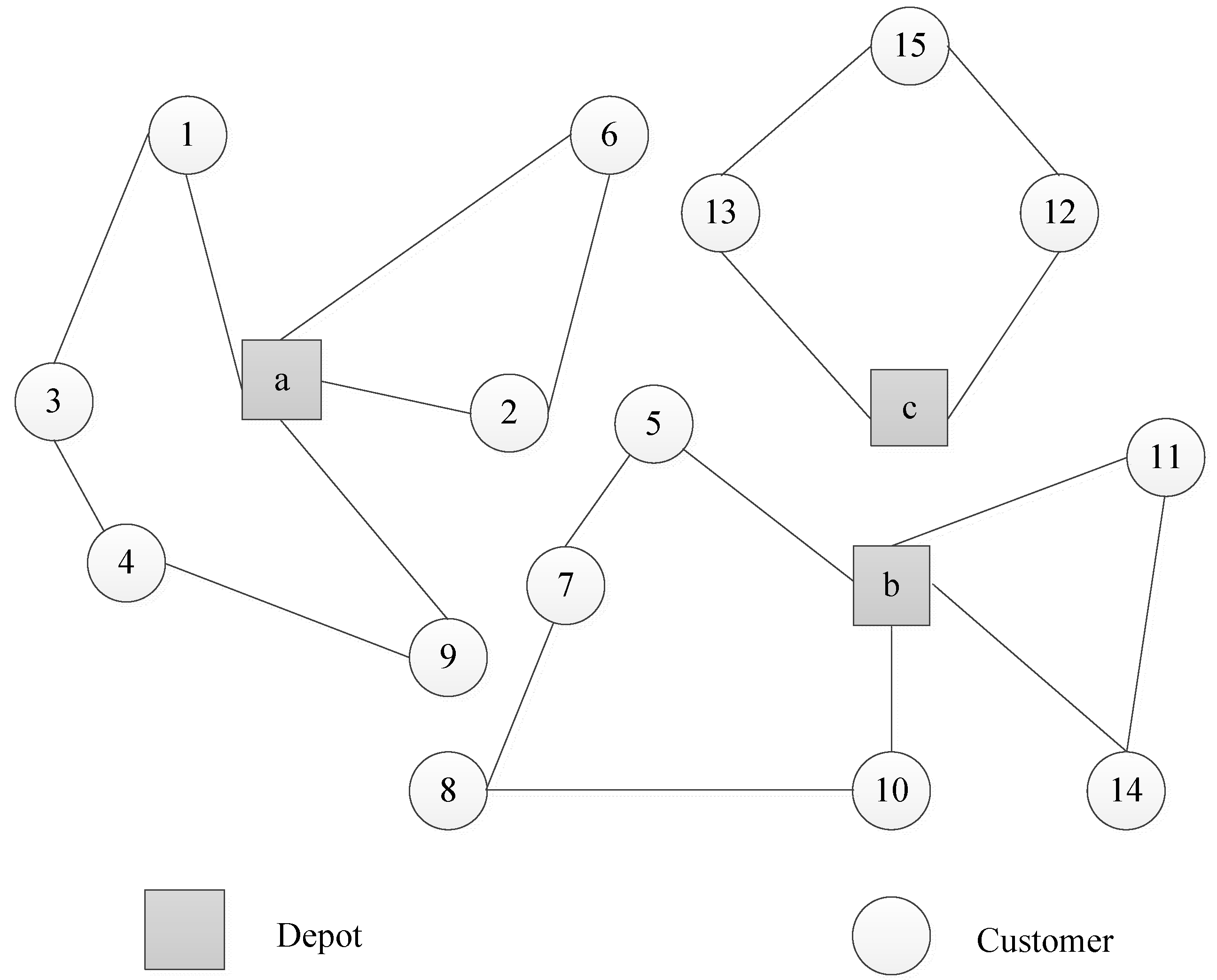
Figure 1 is a sketch of the MDVRP for hazardous materials transportation. It can be seen that with three depots, named a, b, and c, there are 15 customer points, and each customer point can be serviced by only one depot. According to the MDVRP, multiple depots can cooperate with the transportation environment according to customer needs to achieve the global optimal objective.
In the MDVRP, because of the strongly corrosive, highly toxic, explosive, and flammable characteristics of hazardous materials, transportation risk is an optimization objective that must be considered. For enterprises, minimizing transportation costs is paramount. However, low risk means high cost to some extent. Therefore, the MDVRP for hazardous materials transportation should be solved according to the idea of multi-objective optimization, and it is very important to find the Pareto solution set. In many reports in the literature, transportation cost is usually measured by distance and time. However, the shortest transportation distance or time in practice does not mean that transportation cost is the lowest. Compared to distance or time, transportation energy consumption is of great significance to reducing business operating costs, lowering carbon emissions, and achieving sustainable development. Therefore, this paper sets two optimization objectives to minimize risk and energy consumption for hazardous materials transportation.
4. Solving Methods
Different from single objective optimization, possible conflicts exist between multiple objectives in the multi-objective optimization, and an improved sub-objective might cause the performance of the other one to decrease. Multi-objective optimization generally gets a set of Pareto solutions; elements of the set are called Pareto optimal solutions. In reality, decision-makers select one or more solutions from a Pareto optimal solution set as the optimal solution of a multi-objective optimization problem based on personal preference. For a multi-objective optimization problem, the typical algorithms include niched Pareto genetic algorithm (NPGA) [
39], nondominated sorting genetic algorithm-II (NSGA-II) [
40], and strong Pareto evolutionary algorithm (SPEA2) [
41]. These algorithms have better solution efficiency for particular problems. However, for a specific problem, these algorithms cannot be used directly, but often need to be modified according to the problem properties.
This paper mainly uses genetic algorithm theory to design a method of solving MDVRP for hazardous materials transportation. Based on biological characteristics, the genetic algorithm realizes diversity and global search by operating the population composed of potential solutions. It focuses on the set of individuals, which is consistent with the Pareto solution set of the multi-objective optimization problem. Moreover, the genetic algorithm does not need many mathematical prerequisites, but can deal with all types of objective functions and constraints, and has good performance for combinatorial optimization.
4.1. Two-Stage Method
Solving the MDVRP for hazardous materials transportation has a certain complexity, and the algorithm needs to solve two problems: one is to choose appropriate customer points for hazardous materials depots, and the other is to design a reasonable distribution service order for each depot to service the selected customer points. The method is designed in two stages: In stage one, we use the global search cluster to convert the problem into several multi-objective optimization problems with single depots, which decreases the solving complexity of the problem. In stage two, we design a multi-objective genetic algorithm to solve the routing problem transformed in stage one, then we can obtain the corresponding routing for each depot to service its customer points.
4.1.1. Global Search Cluster
Deciding which depot services which customer points is related to the customer point itself, the current depot, and other customer points that are serviced by the current depot. It also means that there is an inverse relationship between the risk and energy of the customer point, the current depot, and other customer points that are serviced by the current depot to determine whether the depot serves the customer point. By defining intimacy in order to determine which customer points the depot will service, customer points will be serviced by the depot with the highest intimacy.
Intimacy is defined as follows:
Here, on the hypothesis that customer point j is serviced by depot d, f(i, d) is defined as the affinity between depot d and customer point i; (rW)ij refers to dimensionless risk and energy-weighted average on network nodes i to j, rij is the dimensionless nominal risk, and is the dimensionless nominal energy. In the above equations, a, b, α, and β are the weighting coefficients used to adjust the factor magnitude; Ld is the current capacity of the depot; Sq(d) refers to the customer points assigned to depot d; the initial state for Sq(d) is the depot itself; and |Sq(d)| is the assigned customer point number to depot d. In this way, all customer points are divided into |S0| groups, where |S0| is the number of the depot.
4.1.2. Multi-Objective Genetic Algorithm
The designed multi-objective genetic algorithm constructs a Pareto optimal solution set by the banker method, using the gather density method to keep evolving the population distribution. The basic process of the algorithm is shown in
Figure 2, in which
Pop refers to population, |
Pop| is the population size and its consistent size is
N,
Paretos is the Pareto optimal solution set, |
Paretos| is the number of Pareto optimal solutions in the set and its value takes 2
N as the maximum, and the end condition of the algorithm is the generation limit. Here, the evolutionary group is a population with a fixed number of chromosomes. The chromosomes of the offspring population are composed of all the Pareto individuals in the Pareto pool, all the individuals in the Pareto set of the current population, and the individuals in the current population selected by the selection operator.
(1) Encoding and Decoding Chromosomes
We adopted a natural number coding method. For example, a network has one hazardous materials depot and eight customer points. If the depot is marked 0 and the customer points are respectively marked 1–8, the randomly generated sequence 0 3 5 1 4 2 8 7 6 becomes one of the chromosomes. Because in the model a few vehicles are needed to service the customer points, chromosomes obtained by this coding method also have to be decoded. The chromosomes are decoded based on a greedy strategy, by inserting the customer points into the route according to the order of the genes in the chromosome without violating load capacity constraint. If another customer point is added, it will violate the load constraint, which means that we should assign another vehicle to service this customer point. Assuming that there are eight customer points and their quantity demand, successively, is 3 tons, 2 tons, 4 tons, 1 ton, 2 tons, 2 tons, 2 tons, and 1 ton, and vehicle load capacity is 8 tons, the chromosome 0 3 5 1 4 2 8 7 6 decodes as follows:
Transportation route 1: 0→3→5→0
Transportation route 2: 0→1→4→2→0
Transportation route 3: 0→8→7→6→0
(2) Designing a Genetic Operator
The selection operator, crossover operator, and mutation operator play important roles in deciding solution efficiency of the genetic algorithm. The basic flow of the selection operator is shown in
Figure 1.
(1) Crossover operator: partially mapped crossover
- ➀
Randomly select a mating area in the selected two chromosomes, for example, A = 0 3 7 | 6 5 1 8 | 4 2, B = 0 1 2 | 3 4 5 6 | 7 8.
- ➁
To chromosomes A and B, add their own mating area to the other chromosome, for instance, to the two chromosomes in ➀, after operation ➁ to obtain A′ = 0 3 4 5 6 | 3 7 6 5 1 8 4 2, B′ = 0 6 5 1 8 | 1 2 3 4 5 6 7 8.
- ➂
To chromosome A′ and B′ respectively, delete the genes behind the mating area that appeared in the mating area, then get their offspring chromosomes A″ = 0 3 4 5 6 7 1 8 2, B″ = 0 6 5 1 8 2 3 4 7.
(2) Mutation operator: reverse transcription method
In the chromosome two different genes are first randomly selected except the genes representing hazardous materials depot, and then a reverse operation is performed on the selected genes.
(3) Constructing Pareto Optimal Solution Set
The banker method is not a kind of backtracking method, and constructing new Pareto optimal solutions does not need to compare with the existing Pareto optimal solutions. Set Paretos as the Pareto optimal solutions set and Pop as evolution group set, then adopt the banker method to construct Pareto optimal solution set for Pop as follows:
- ➀
Initialize the Pareto optimal solutions set as Paretos.
- ➁
Take out an individual (usually the first one) from Pop, as a banker, compare the banker with other individuals, and delete the individual dominated by the banker.
- ➂
After the banker is compared with all individuals in Pop, if any individual dominates the banker, delete the banker, otherwise add the banker into Paretos.
- ➃
Repeat steps ➁ and ➂ until Pop becomes null.
(4) Calculating Individual Gathering Density
Evolving population distribution is an important part of the multi-objective optimization. Here, the gathering density method is used to keep the evolving population distribution, specifically adopting gather distance to represent the individual gather density, and the greater gather distance shows the smaller gather density. Before calculating each individual distance, we need to order the individual according to its objective function value. Set distance
as the gather distance for individual
i, and
as the value of objective
j for individual
i. If individual
i contains
m objectives, the gather distance for individual
i will be calculated by Equation (20):
4.2. Hybrid Multi-Objective Genetic Algorithm
When solving the MDVRP for hazardous materials transportation, we need to consider the customer points serviced by each depot as well as the service order. Therefore, we designed a hybrid multi-objective genetic algorithm (HMOGA) to solve the MDVRP for hazardous materials transportation. The algorithm adopts the same method shown in
Section 4.1.2 in the aspects of Pareto optimal solution set construction and keeping the evolving population distribution. Other specific operations are as follows:
(1) Chromosome Coding and Decoding
The hybrid multi-objective genetic algorithm adopts a hybrid coding mode combining the customer point and distribution service. The coding mode divides the chromosome into two parts: part 1 is to select the customer points for each depot to service, with a length equal to the number of all customer points and gene values are depot numbers; part 2 is to determine the service order for each customer point, with a length also equal to the number of all customer points, while genes are customer points. Combining part 1 with part 2 and according to the loading capacity constraint of hazardous materials transportation vehicles, we adopt a greedy selection strategy to decode the chromosome. For example, if there are three depots and 10 customer points, the hybrid coding chromosomes are as follows:
(2) Genetic Operator Design
Similar to coding, genetic operators are also designed in two parts. Chromosome part 1 adopts two-point crossover and simple mutation operators; chromosome part 2 uses partially mapped crossover and reverse transcription operators.
(1) Crossover operator
- ➀
Two-point crossover operator: First, according to certain probability, freely choose two individual chromosomes as the parent generation, and select two genes in part 1 of the selected chromosomes as the intersections; second, swap the genes between the intersections of the selected chromosomes, generating the offspring chromosomes.
- ➁
Partially mapped crossover operator: Use the partially mapped crossover operator in
Section 4.1.2 to complete the crossover operation.
(2) Mutation operator
- ➀
Simple mutation operator: With a certain probability, randomly select a chromosome, freely choose a gene on part 1, and change the gene to its allele; if the selected gene is b, change it to a or c.
- ➁
Reverse transcription operator: same as reverse transcription operations in
Section 4.1.2.
6. Conclusions
Hazardous materials transportation routing is one of the basic elements to assure safe transportation. In reality, it is very common that some depots coordinate the transportation and distribution of hazardous materials.
Designing scientific and reasonable transportation routes considering factors such as transportation risk and energy consumption can help deliver hazardous materials to each customer point safely, quickly, and economically. We took the MDVRP for hazardous materials transportation as the research object, considering transportation risk and energy consumption, and established a hazardous materials transportation routing multi-objective optimization model. In the model, the risk of the road segment is measured by the number of people who could be affected if an accident occurred, and energy consumption is measured by the trucks overcoming resistance during transportation.
As for solving the model, we designed a TSM and a HMOGA. In the TSM, the purpose of the first stage is to find the set of customer points serviced by each depot through the global search clustering method considering transportation energy consumption, transportation risk, and depot capacity, and to determine the service order for customer points to each depot by using a multi-objective genetic algorithm with the banker method to seek dominant individuals and gather distance to keep evolving population distribution in the second stage. The HMOGA combines the solution method of the two stages into one stage. In the design of the algorithm, customer points serviced by the depot and serviced orders are optimized simultaneously. In the end, we compared the above two methods through two cases, and the results show that the methods can obtain different Pareto solution sets. The TSM and HMOGA have their own advantages, but the HMOGA is able to find better transportation routes for the whole transportation network.
In addition, when the length and slope of the road segment do not change much, energy consumption does not change much, and decision-makers can use transport risk as the main basis for decision-making. When the difference between the slope and length of the road segment is large, it is important to optimize the energy consumption to find the Pareto optimal solution set for hazardous materials transportation. The decision-maker can select the appropriate solution to perform the transportation task in the Pareto solution according to the actual situation. Compared with distance, when energy consumption is the optimization objective, although the distance is slightly increased, the number of vehicles and amount of energy consumption are effectively reduced.
Due to the lack of actual data, such as accident probability and slope information of road segments, we designed the example by simply improving the data in the existing literature. Although the rationality of the model and algorithm is verified, a large-scale actual road network study is still necessary for further research. In addition, we found the Pareto optimal solution set, and for each solution in the set, it is difficult to measure which one is better. Hence, in combination with other conditions, choosing one or more Pareto solutions as hazardous materials transportation routes is the focus of the next phase of research.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







