1. Introduction
By 2050, Germany anticipates strong demographic changes. Rural areas are expected to be particularly affected. The delivery of mobility services in these areas will represent a big challenge. The complexity will be increased by the unfeasibility of the provision of high-frequency public transport, mainly due to low population densities, dispersed urban structures, and changes in age structure. Notwithstanding, to fill in mobility gaps, volunteer-based flexible transit solutions have been successfully implemented in Germany since the early 1980s.
This article presents the use of electric vehicles (EVs) in volunteer-based demand responsive transport (DRT) systems in rural areas, and it concentrates on the results of two case studies researched at the University of Stuttgart and the Institute of Transportation Research Stuttgart (VWI), Germany [
1,
2]. The use of EVs in a rural context is due to the effort of the state government of Baden-Wuerttemberg in Germany to promote electro mobility for different applications. Using EVs in rural areas provides not only the opportunity to improve people’s mobility but also opens new markets for the technology in more demanding contexts. For example, in general, rural areas are more dispersed than urban areas, forcing residents to travel longer distances to fulfil daily needs, perform leisure activities, and access services [
1]. An aspect that might not be associated with rural areas is the improvement of the environment. Nonetheless, it is an important aspect for users of the DRT services studied [
1]. A point that EV DRTs might help to improve, is the perception of the high costs of EVs in relation to their low efficiency in terms of driving distances compared to internal combustion engines. The successful use of electric vehicles in rural areas as DRTs, due to long distances they cover, might help improve the image of the technology and accelerate its acceptance. Today, as this article is written, one of the services subject to study has decided to acquire a second EV.
The discussion below is particularly related to the research at hand and our observations. However, sustainable mobility in itself requires the use of clean energy. In that sense, it presupposes the reduction of punctual and global pollutants, which EVs are able to achieve (if the electricity is produced with clean energy). Hence sustainable mobility and the use of EVs are important in all contexts, including rural areas. Moreover, in recent years, the energy issue has been the subject of political action in Europe and Germany under the energy transformation policy. Reduction of pollutants is needed on all fronts, including rural areas.
The document starts by describing DRT systems, and identifies the reasons for their implementation in Germany. In specific, the first part describes the types of DRT systems used in the rural area context, and delineates their governing aspects (i.e., the volunteer-based operation). Subsequently, the reason behind the use of electric vehicles (EVs) in this context is briefly discussed.
The second part describes the methodology that is used to gather and analyze the data to evaluate two different types of electric vehicles.
The third part shows selected results of the studies. Specific challenges and requirements regarding the use of EVs in this context are outlined. Lastly, a brief conclusion mentions aspects to be considered for a successful implementation of EVs in DRT systems, but above all, in a way such that the general public and the system’s operators welcome them as a viable form of sustainable transport.
1.1. Demand Responsive Systems in Rural Areas
DRTs come in different forms and sizes, covering from traditional single occupancy vehicles to the most common fixed route bus system. The systems operate on demand, either fully flexibly or through demand-oriented schedules and times [
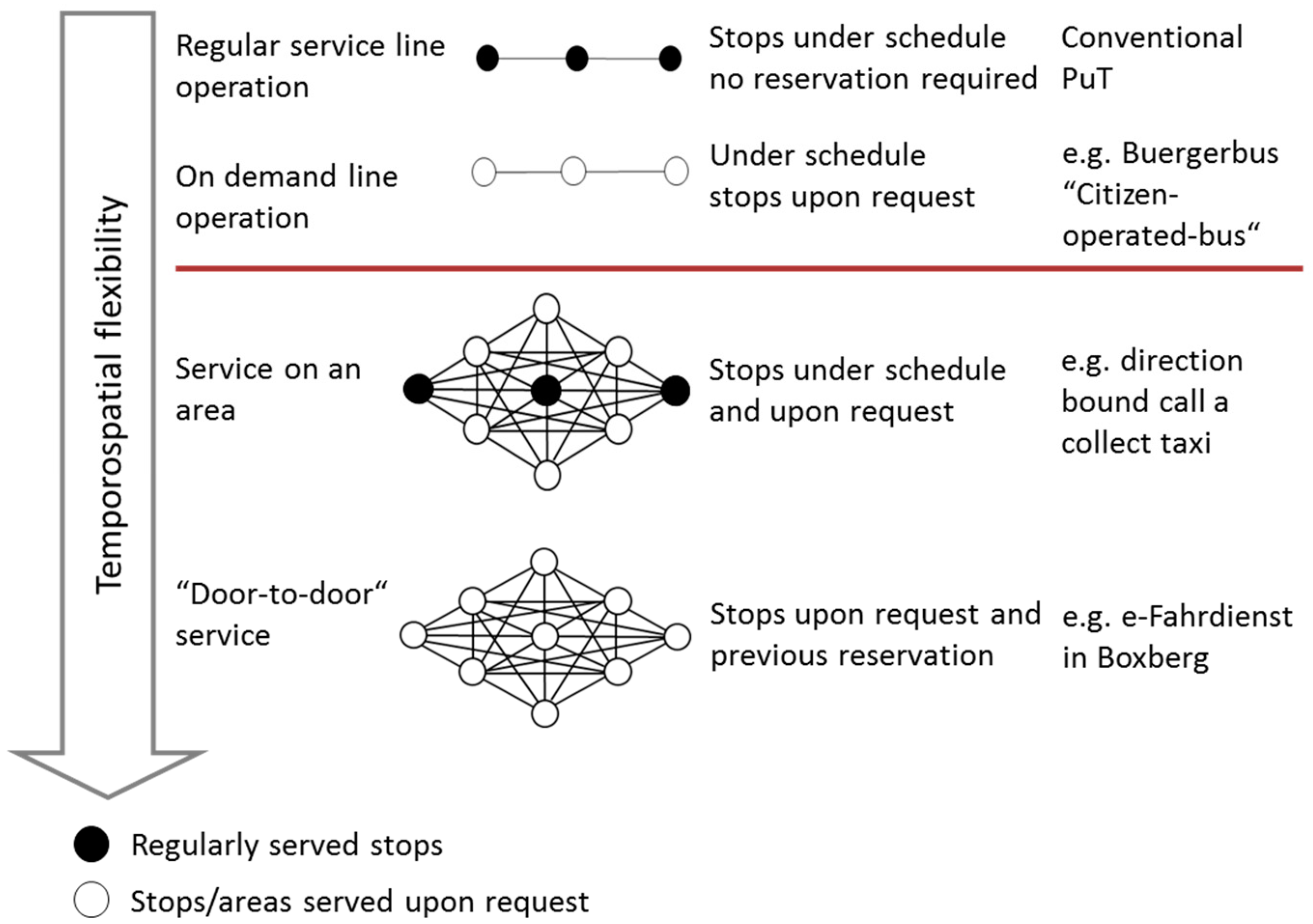
3]. Most DRTs are mainly used in areas of low demand, such as rural areas or for special needs (e.g., paratransit). In a German context for rural areas, the system can be categorized depending on its flexibility in time and space (
Figure 1). The more flexible systems are ideal for small settlements while the least flexible options are better suited for larger communities [
1,
2].
DRTs are important in rural areas, namely due to the low population densities resulting from dispersed settlements and low population [
1]. The issue is increased by the demographic structural change experienced in Germany, namely, more elderly people. DRTs however, are not designed or intend to replace classic public transportation systems [
4], they intend to offer an opportunity to close service gaps, which otherwise would be financially impossible to cover due to limited governmental resources. According to [
5], four aspects are required for the implementation of a demand transport system:
The type of mobility required depending on the service area; varying from region to region
The potential demand, which should be between 3000 and 5000 people [
5]
The specific group to be serviced, such as seniors, youngsters, housewives and their kids, etc.
The type of trips such as shopping, doctor’s appointments, extracurricular activities, etc.
These aspects would determine, among other aspects, the type of vehicle to be chosen.
1.2. Volunteer-Based DRTs in Germany
Several types of services have been developed for rural areas in Germany. These services strongly consider the perspective of passengers, and not just those of the administration and the companies [
6] and have been successfully operated in the country under volunteer organizations/associations since the early 1980s. They consist mostly of the so-called “Buergerbus”. However, other forms, such as the “Buerger(ruf)auto” (i.e., full temporospatial “Citizen-operated-car”) have been developed to fulfil more flexible and low-demand services [
1,
4]. In the last five years, the federal government, as well as several states, have initiated an attempt to promote sustainable mobility by the use of electric vehicles [
7,
8]. In specific, some projects have been conceived in conjunction with rural volunteer based services [
2]. The University of Stuttgart and VWI have taken part in two of those projects. The knowledge so far acquired is a valuable resource for the development of vehicles that fit the needs of the systems, since the studies have identified the opportunities for the use of electrical vehicles in these systems (certainly big), but above all, they have pointed out that specific challenges that need to be met and overcome if EVs are to be regarded as more efficient for their use in rural DRT services. The latter is certainly important if the use of EVs is to be encouraged and promoted.
1.3. DRTs Studied
The two systems under study and their characteristics are shown in
Table 1. Their requirements in terms of the vehicles needed, as well as the challenges encountered in the use of EVs, are detailed in the following sections.
1.3.1. Buergerbus
An electric Buergerbus was evaluated in the municipality of Salach (830 ha) and in the city of Ebersbach (2630 ha), both located near Stuttgart, Germany [
2]. Both areas vary in terms of population, service hours, and demand. The systems are operated on a fixed timetable with fixed bus stops located near to each other, to cover the area as thoroughly as possible. The population varies from approx. 8000 (Salach) to approx. 15,000 (Ebersbach). The driving distance varies from 66 km (Salach) to 146 km (Ebersbach) per day. Hence, the requirements for an electric minibus vary. For this project, a converted diesel Mercedes-Benz Sprinter electrified (with a capacity of 38.8 kWh) by German E-Cars GmbH has been evaluated (
Figure 2).
1.3.2. Buerger(ruf)auto
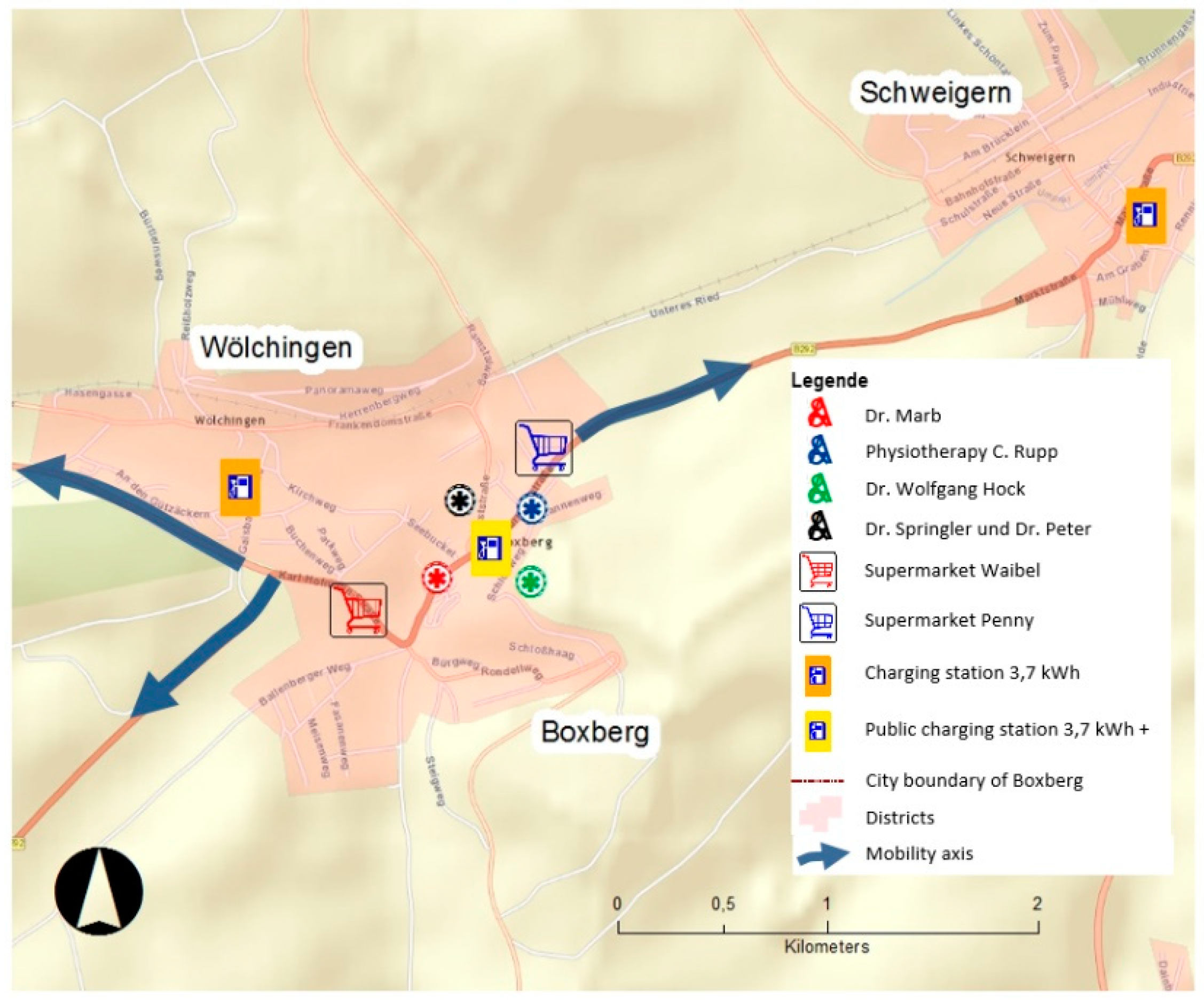
The electric Buerger(ruf)auto in Boxberg, Germany (100 km north of Stuttgart) is a fully spatiotemporal “door-to-door” service in a town spreading over a large area (10,000 ha), but a low population of 6500 people [
1,
9]. The system is operated daily by volunteers during weekdays. The driving distance is about 72 km/day. The main users of the service are senior women. The trips are mainly shopping and healthcare related [
10]. Many of the users have walking assistance devices such as walkers; hence, ample space in the car is needed [
1]. The solution at the time was the 2013 Renault Kangoo ZE (Zero Emission) with a capacity of 22 kWh (
Figure 3).
In Boxberg, during the course of the study, drivers and costumers were asked, through a survey, to give their opinion about the EV service [
1]. The results were very positive. Up to 99% of the costumers were satisfied with the service. The main reasons were the door-to-door mobility that the service provides, and the cheap mode of transportation compared to low frequency public transportation (the price varies from 1.00 to 1.50 Euros depending on the distance travelled). Drivers had the most problems with the EV, thinking the driving range was not enough, but identified electromobility as a way to improve the environment, and as a sensitive technology. However, they thought that the purchasing price is still too high [
1,
10]. In general, the perception of the technology still needs to improve to be able to compete with internal combustion vehicles; for example, people are used to internal combustion engines and expect the same performance for a reasonable price.
2. Methodology
2.1. Methodology Regarding the Buergerbus
To evaluate the applicability of the minibus as a DRT vehicle for the Buergerbus service, several factors were considered to quantify its energy consumption (
Table 2).
The data for performing this analysis was collected through a Geographical Positioning System (GPS) logger inside the vehicle with software developed specifically for this project. The logger ran on a mobile device: a minicomputer for industrial applications with a touch screen, freely programmable function keys, several interfaces, and a robust hardware. The data was recorded on a 4 GB memory card. The data was extracted on a regular basis and analysed back in the office. The following data was gathered by the device in one-second intervals:
After each trip, two types of protocols were obtained: one in gpx-format for the electronic visualization of the trip, the other as a csv-database to allow for additional analysis. Included into this analysis, the following measurements were analysed:
Total trip time
Total bus stop time
Average speed (along the DRT routes and routes from the depot to provide the service as well as to the depot after providing the service)
Sum of all slopes on a route
Average slope of all trip legs along the routes
The most important measurement was the energy consumption as provided by the vehicle’s battery monitoring system. The data were gathered by a built-in Controller Area Network (CAN) data logging device. Besides the battery’s energy consumption, the device tracked the battery voltage and the battery ampere status in one-second intervals.
Results of the analysis will be shown in
Section 3 for two services operating in two municipalities in Baden Wuerttemberg, Germany, namely Salach and Ebersbach (cf.
Section 1.3.1).
Despite most of the tracking being performed on trips during operation, test drives were also conducted, especially for the evaluation of the influence of the vehicle’s weight according to the number of passengers.
2.2. Methodology Regarding the Buerger(ruf)auto Boxberg
To test the operation of the vehicle, data was collected for all routes with the use of a GPS logger as described in
Section 2.1. The GPS logger was manually activated by the driver through a touchscreen of a portable computer by pressing on a start and stop button, which corresponded respectively to the beginning and end of every trip. The trips recorded corresponded to all of the times that the car was driven, with or without passengers.
An additional method for obtaining data was through driving protocols, which the drivers picked up at the beginning of their shifts from a scheduler at the town hall. The driving protocols include the routes that had been reserved by the users in advance, as well as information that cannot be stored by the GPS logger, namely battery level, temperature, use of heater or air conditioning, time at the beginning and at the end of the passenger journey, as well as start and end destinations. The data were later used to determine the performance of the vehicle (e.g., range under different conditions, for example driving with air conditioning).
Two approaches were used to gather the data in this research. The first one consisted of university staff members driving the vehicle on predetermined route characteristics such as flat slope routes, routes with steep slopes, or a combination of both. The second approach consisted of emulated routes, which were chosen randomly. The random routes were driven by university staff to obtain data sets that were comparable, and as close as possible, to the actual conditions of the trip chosen. In addition, the chosen trips consisted of various subjectively determined driving styles (e.g., offensive/defensive) and were distributed over the year to detect any influences on the driving range due to temperature differences. Based on the collected data, three aspects for evaluation could be identified:
The influence of the driving style on energy consumption
The influence of topography and temperature on energy consumption
The determination of the location of charging infrastructure
3. Electric Vehicles in rural DRTs—Requirements and Challenges
The intention of this section is to explain the issues that were encountered, in order to provide assistance to EV’s manufacturers in determining the specific needs for the future development of vehicles used in rural DRT services.
3.1. Buergerbus—Requirements
Electrical minibuses need to comply with the transportation laws in the country of implementation. In Germany, the “Personenbefoerderungsgesetz “(Public Transport Act) sets the regulations for the development of the system, e.g., under which circumstances an operating license is needed or not. Additionally, to fulfil state-level funding requirements, criteria such as accessibility or barrier-free access needs to be met in all vehicles. Therefore, to comply with accessibility criteria and a convenient transportation specifically for elderly people, low floors should be provided. In addition, and needless to say, the minibuses need to have sufficient energy to provide the service throughout the whole day. Notwithstanding, today, there is no existing vehicle that provides these requirements, at least not for the volunteer-based Buergerbus systems, which are obliged to operate vehicles with a limited weight [
11].
To be able to implement an electrical Buergerbus system, the solution in this project was the conversion of an existing diesel vehicle. However, this solution was far from optimal since several compromises had to be made: for example, the total weight (due to the battery) allowed and the amount of people than can be transported (seats were taken out in the conversion due to the weight restriction) or the accessibility aspect, which could not be met completely due to the high floors required for the placement of the battery.
Additionally, further challenges with the tested minibus occurred during the project. The vehicle was bought at an OEM (original equipment manufacturer) with an interior designed for common people transportation and with a common diesel engine. The modification to fulfill customer requirements regarding comfortable and safe transportation for mostly elderly people, was done by a third-party company. The electrification of the traction was done by a small company which specialized in electric vehicle (EV) conversions car conversion. However, this resulted in a lack of fast and reliable service from cases of initial minor problems such as interruptions or problems during the charging process. Specific challenges are mentioned at the end of the document.
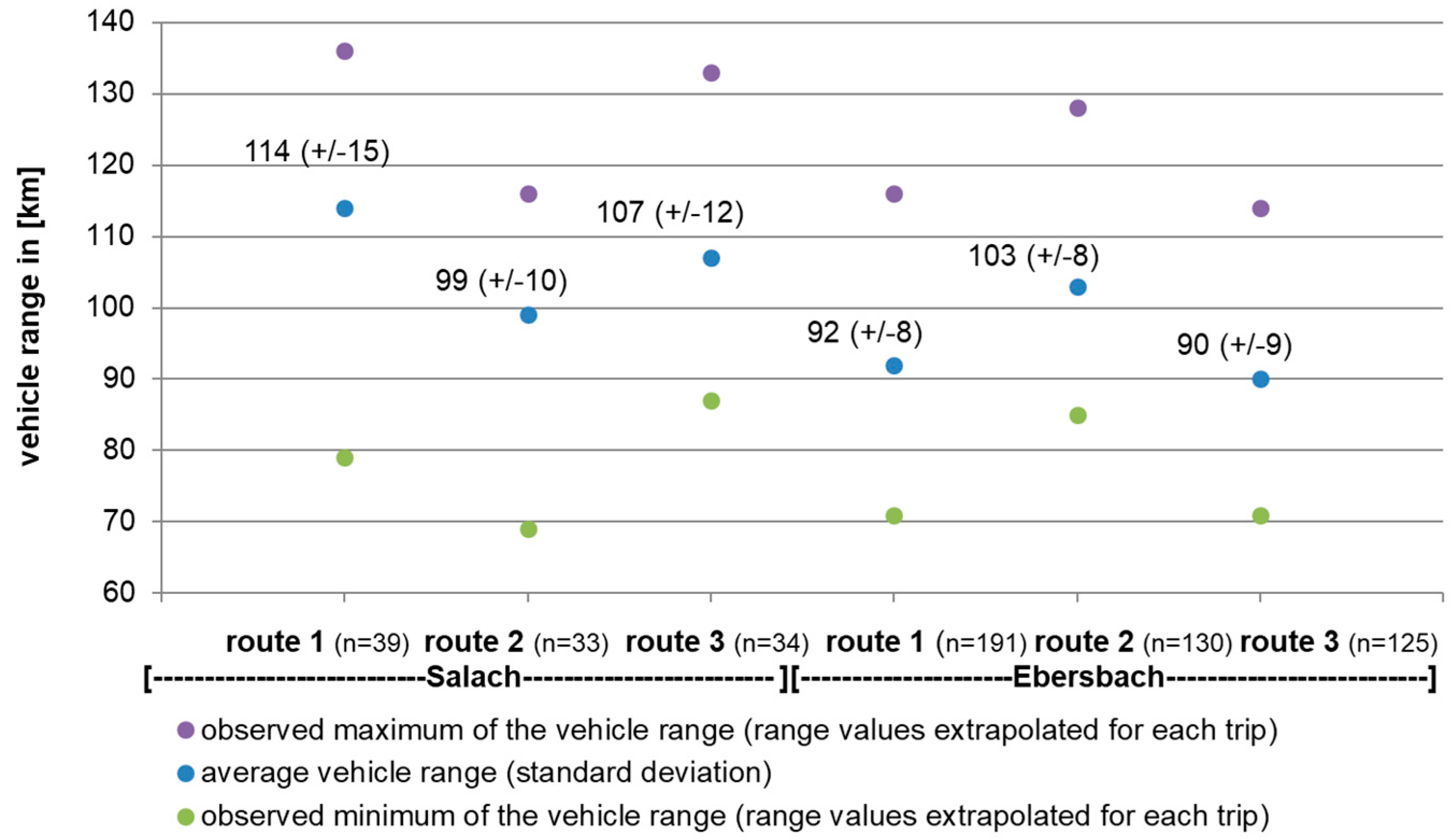
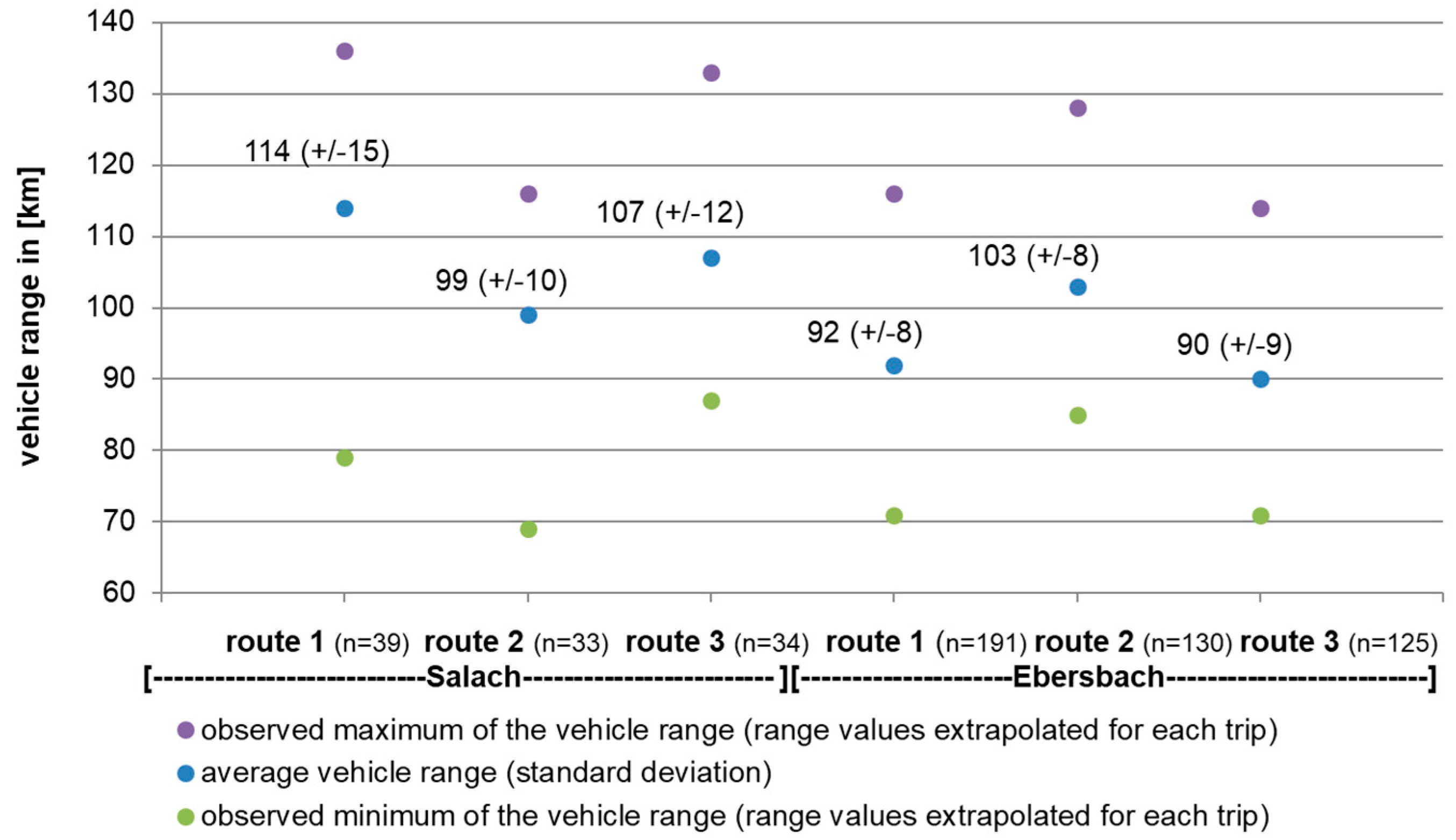
Figure 4 shows the maximum, minimum, and average range of the test vehicle within the two services under study Salach and Ebersbach for all trips analyzed. This was based on single values that were extrapolated from the measured distance driven and change of battery status for each trip.
As it can be observed, the average range lay between 90 and 114 km although, the NEDC (new European driving cycle) mentions that the minibus is able to drive up to 120 km under laboratory conditions. The results show that the average range measured in the project was up to 25% less. Even though influencing factors as shown in
Table 2 affected the results, the required range to fulfil the service without issues was not achieved. An additional aspect that affected results, which should be considered for an effective service provision and vehicle choice, was the amount of stops along one route, which varied during an operation day.
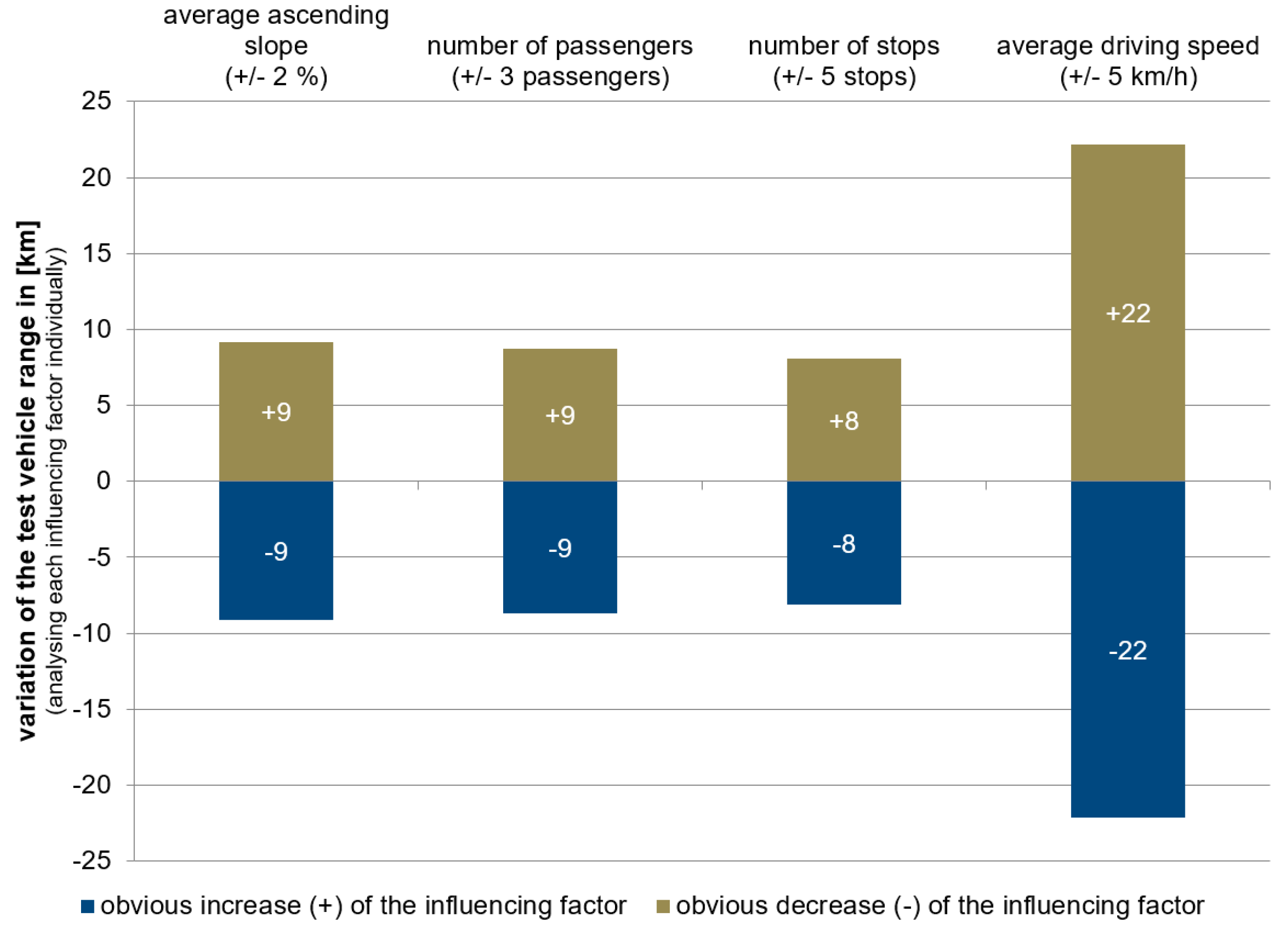
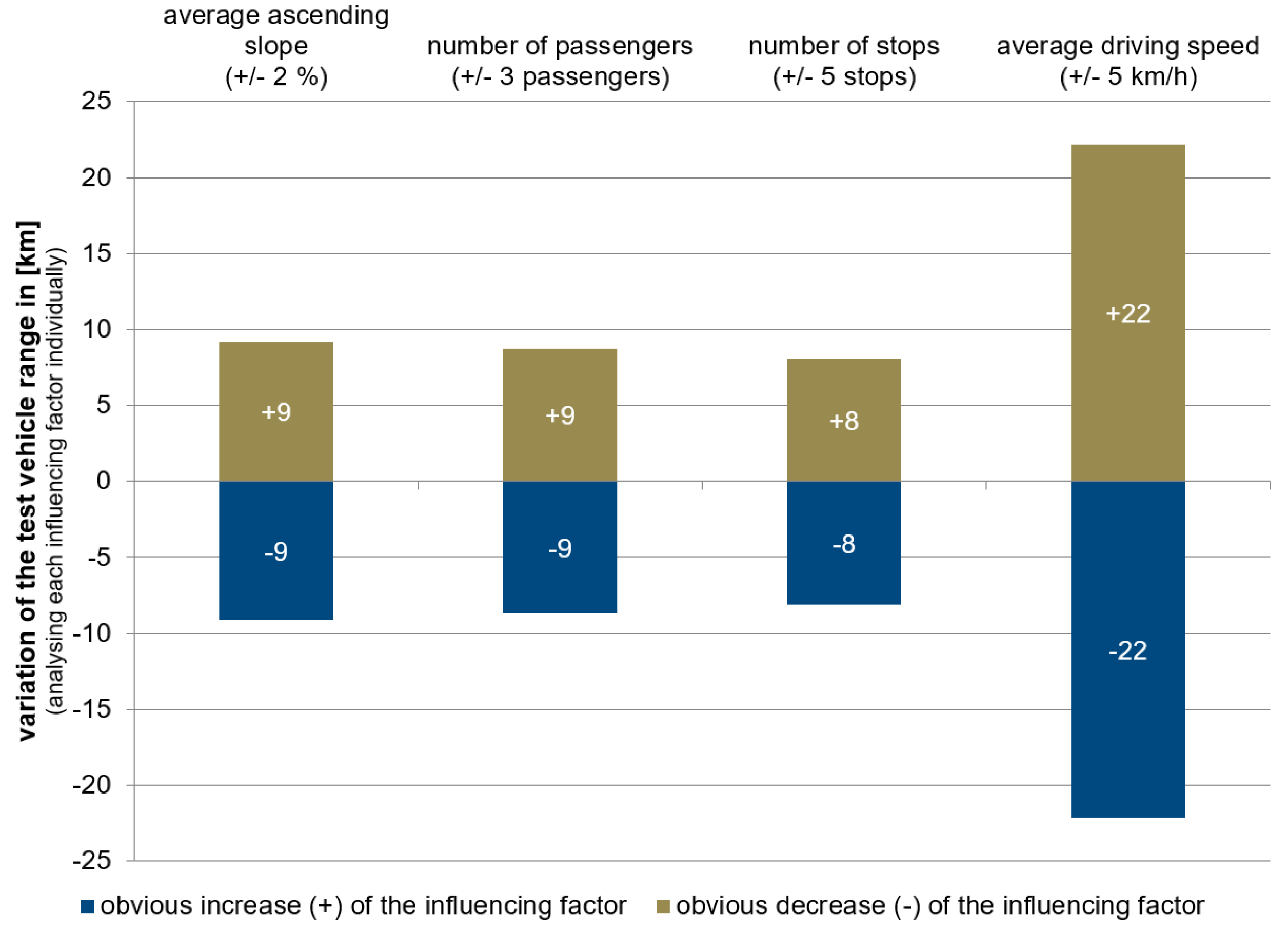
Additionally, influencing factors such as the elevation profile of the route, the passenger/vehicle load, the amount of stops along the route, and the influence of the average driving speed, were each examined throughout the project.
Figure 5 shows the results by highlighting the variation of the test vehicle range in km for each factor. The increase of a factor was specified by the correlating decrease of the vehicle range, and vice versa.
The results were obtained by analysing individual influencing factors; hence, a summation of factors to determine a total effect was in this case, not appropriate. From the analysis, it was found that speed was the most influential factor when keeping all other factors constant. For example, an increase of the average speed by 5 km/h (all other factors remain the same) resulted in a decrease of the driving distance of approx. 20 km. Likewise, an increase of 5 km/h showed an increase of energy consumption of approx. 6 kWh per 100 km, while an equivalent increase in the other factor only displayed an increase of approx. 2 kWh per 100 km.
3.2. Buerger(ruf)auto—Requirements
For a Buerger(ruf)auto service, a large enough vehicle is needed to carry shopping and walking assistant devices. However, the car needs to be low enough for easy access, since most users are elderly. In addition, the weight should be low in order to avoid excessive use of the battery, especially if the service is provided around hilly areas [
1].
As mentioned in
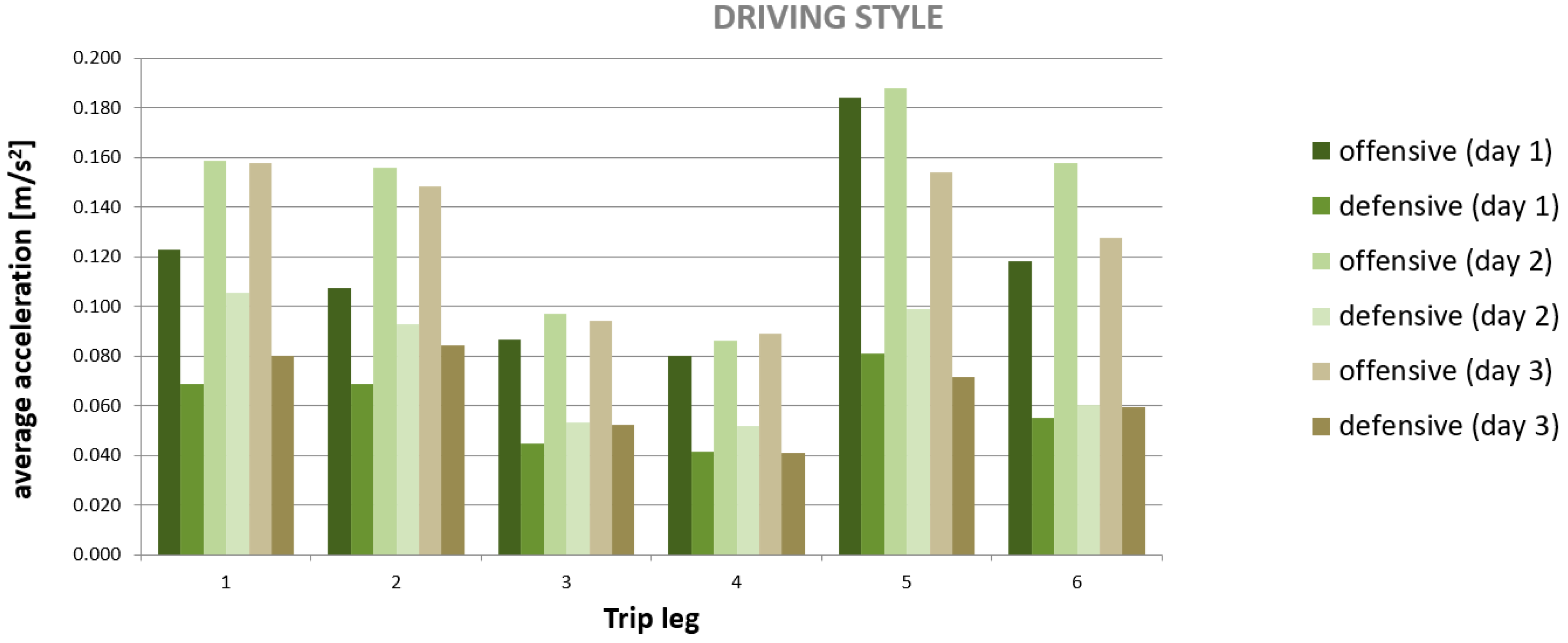
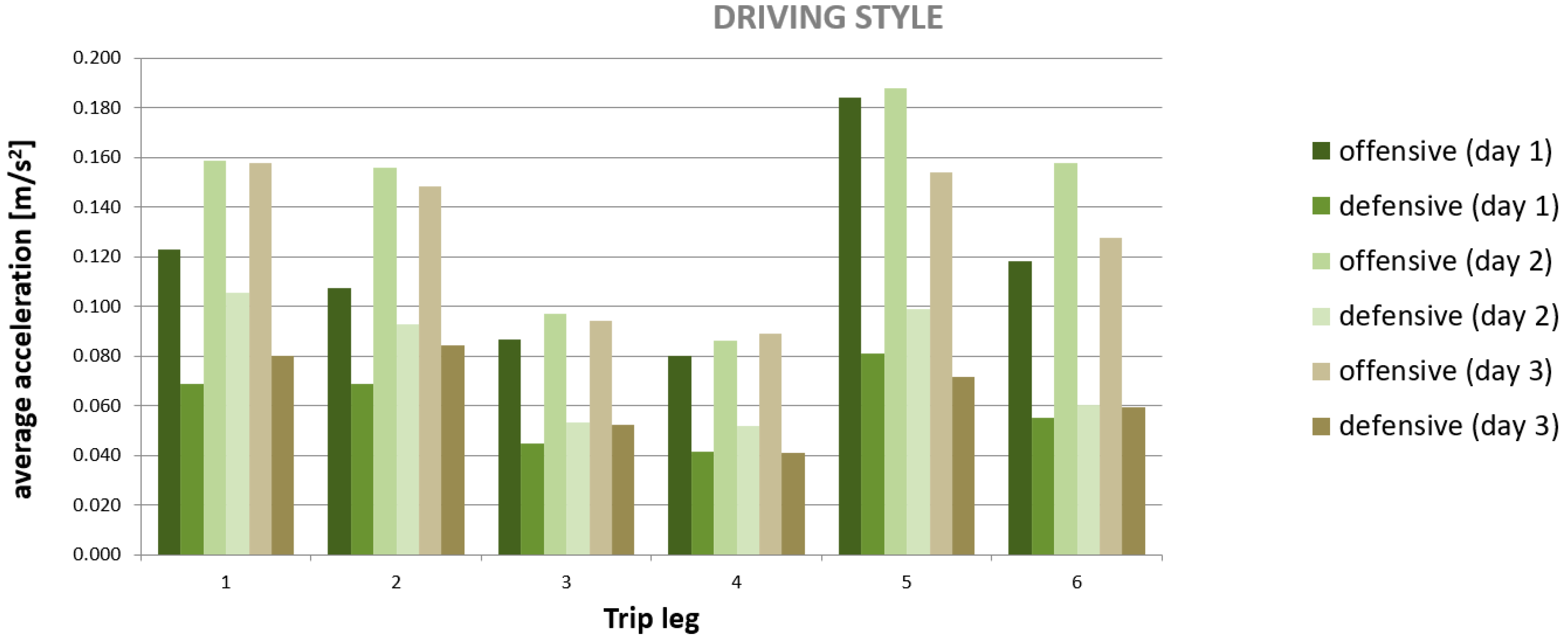
Section 2, with the data collected, the energy consumption was calculated, accounting for different driving styles. The driving styles were determined mathematically, based on the average acceleration per trip leg (see
Figure 6). The average acceleration was calculated, based on the distance and speed travelled according to the GPS-logger for six trip legs on a 12.5 km long route. The route was driven on three different days—one day was in March, one in July, and one more in October. This was done in order to compare different ambient temperatures. To capture the influence of the topography, the trip legs corresponded to changes in slope. A driving style that maxed out the revolutions per minute (rpm) was considered an aggressive driving style in comparison to a driving style that maintained rpm well below the maximum mark. The conclusion regarding differences in driving styles was that a defensive driving style consumes 24% to 37% less energy (depending on the ambient temperature during the test drives) compared to an offensive driving style on the same route and same temperature.
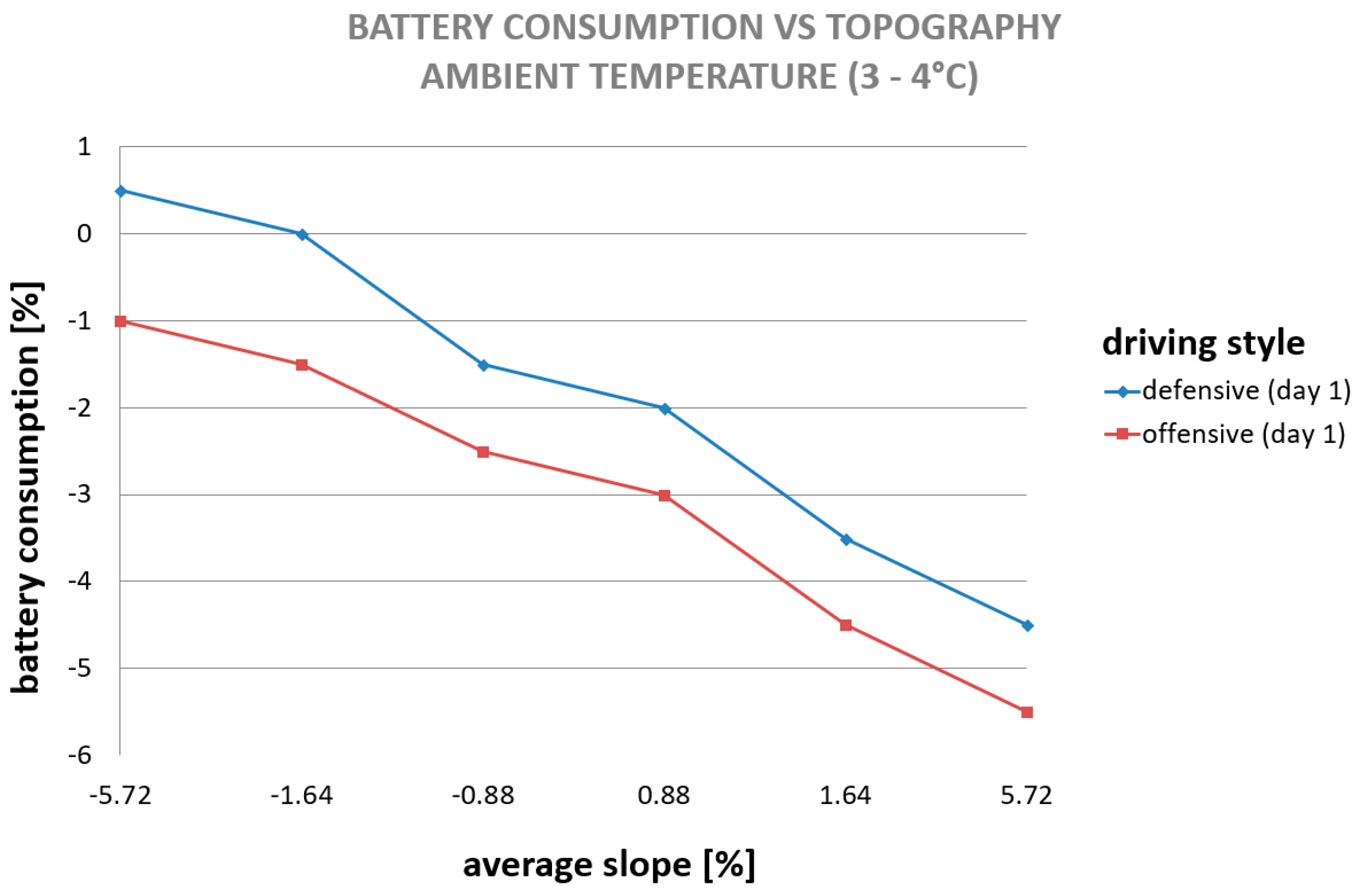
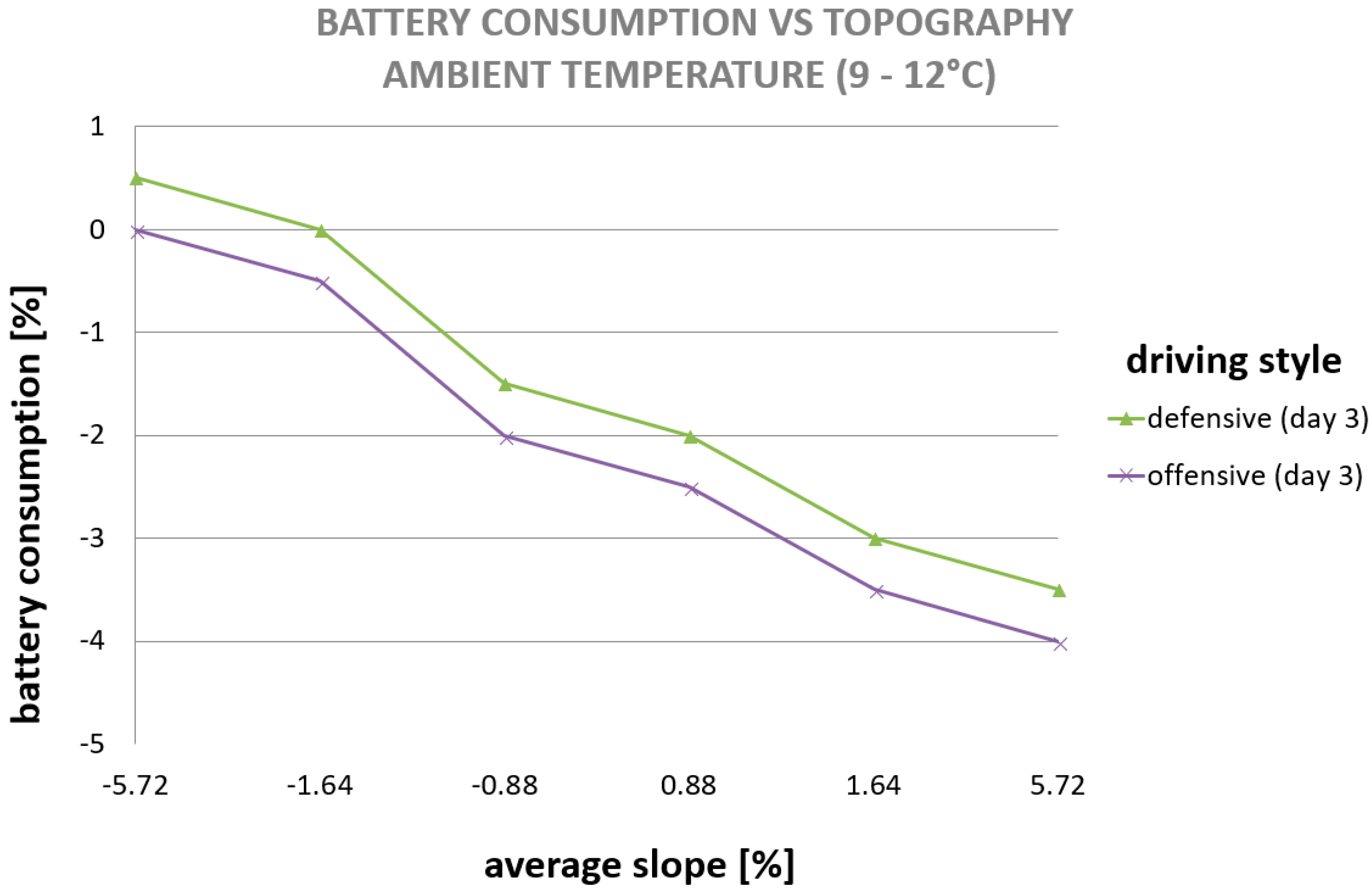
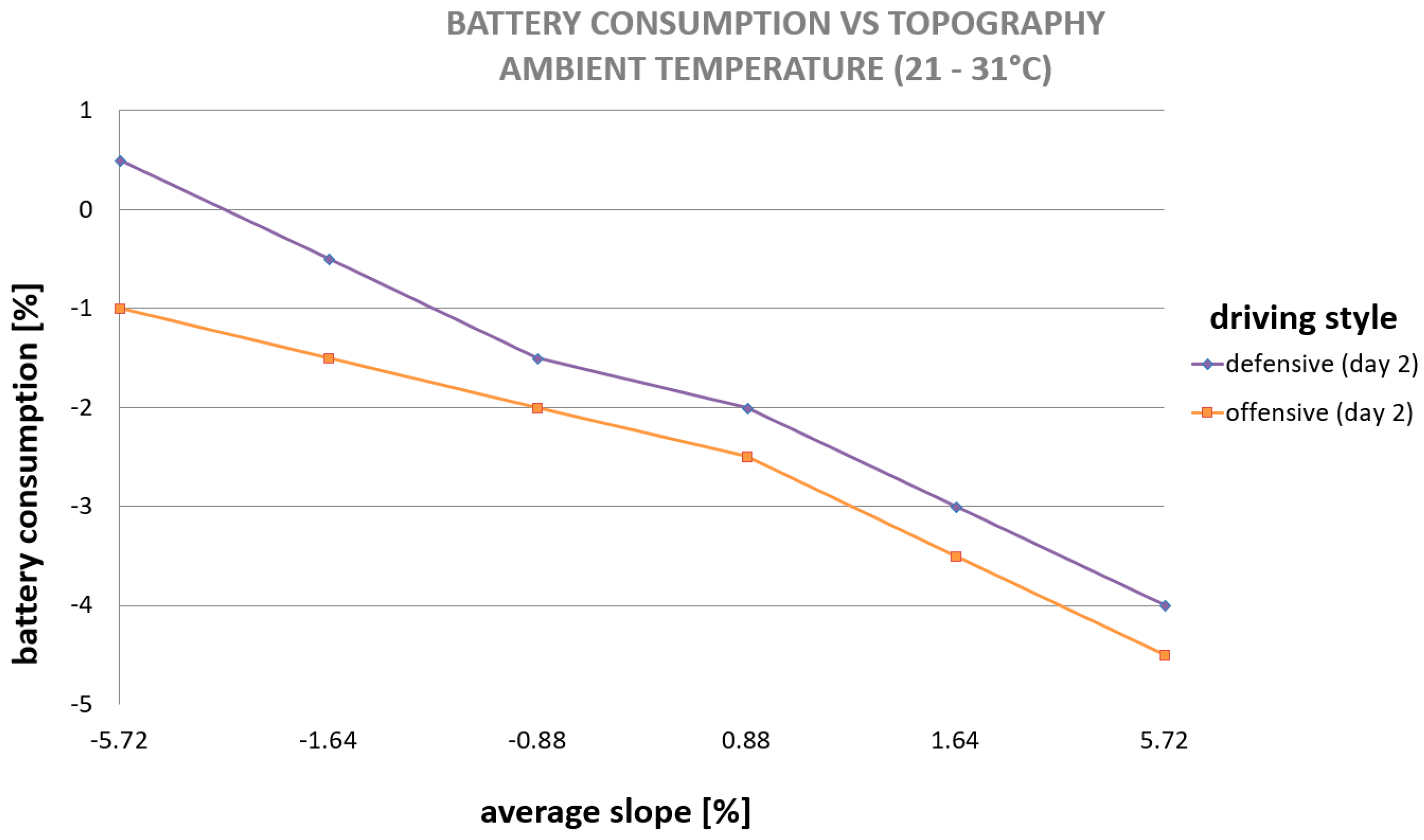
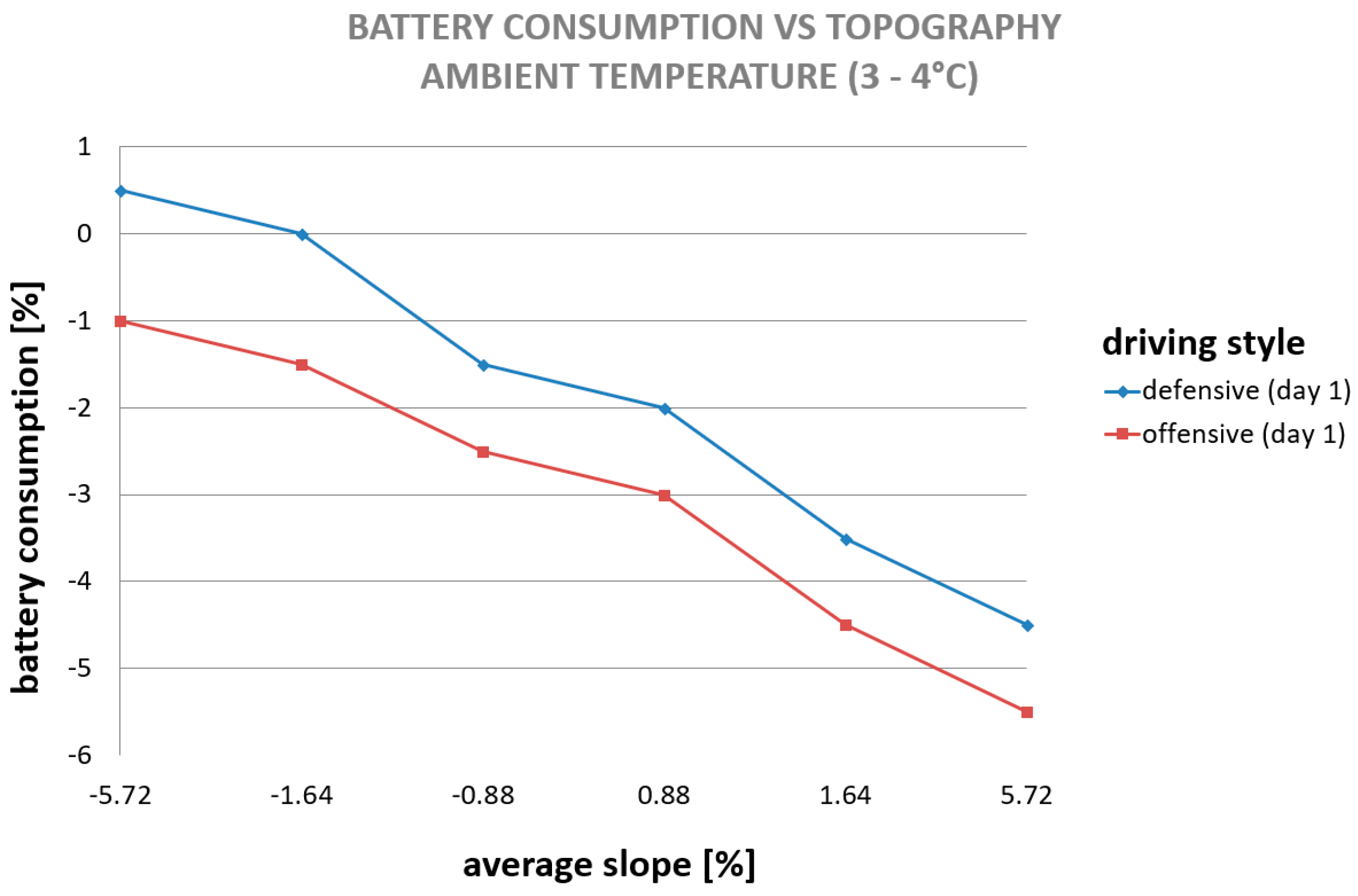
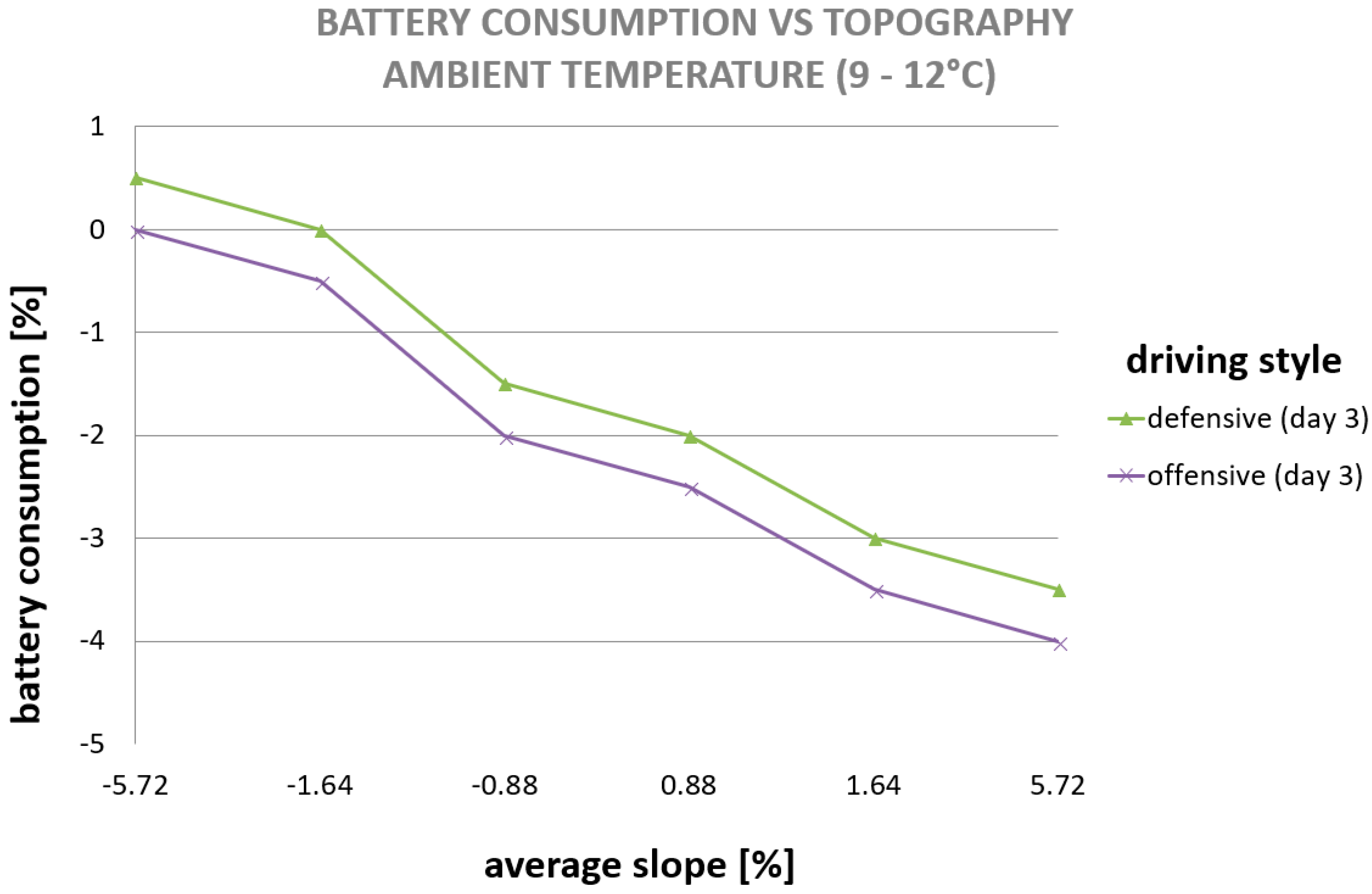
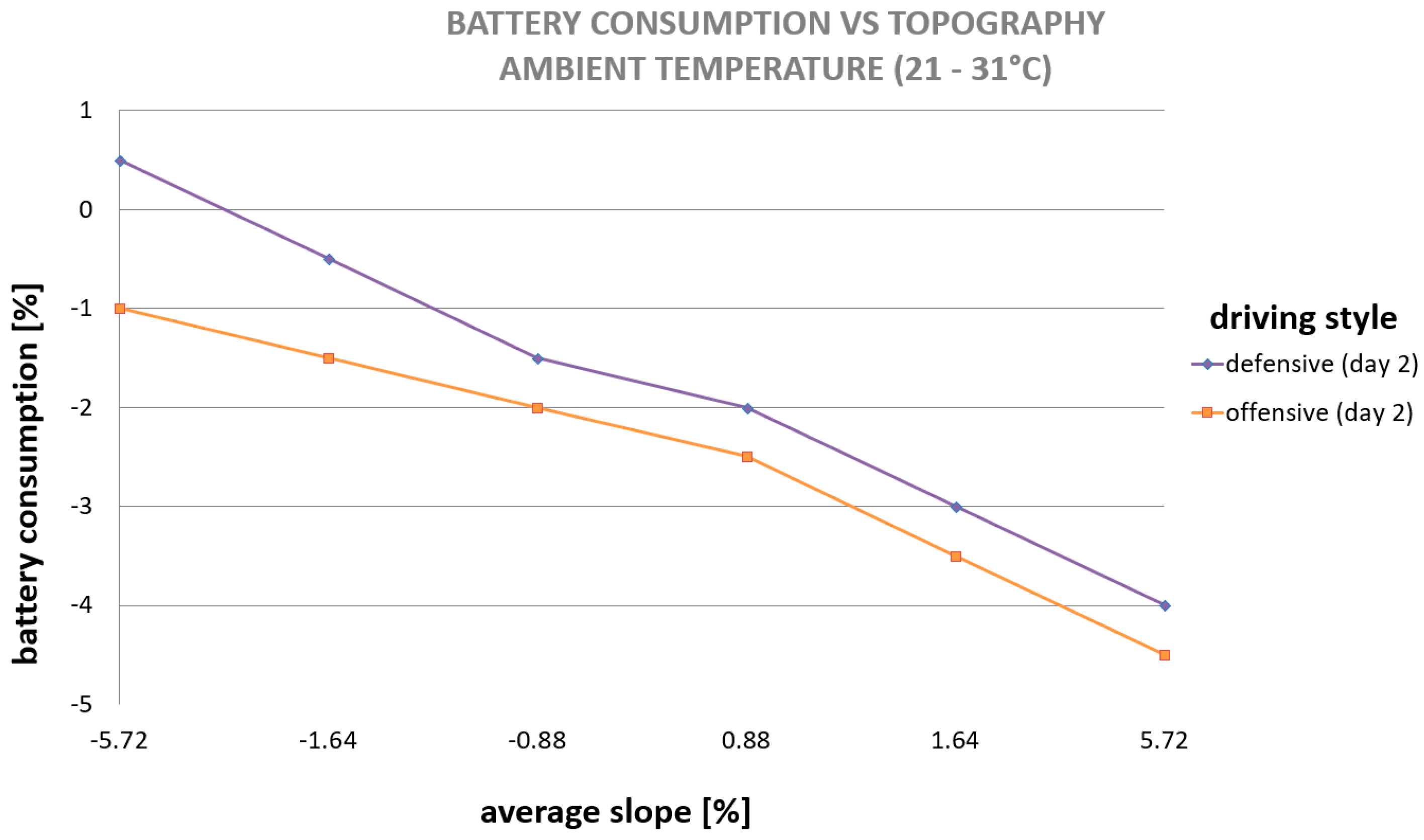
The second aspects to evaluate were the topography and temperature. As expected, the topography and climate have a major impact on battery consumption (see
Figure 7,
Figure 8 and
Figure 9). It was found that for the same temperature, in flatter areas, the battery consumption was lower than in steeper areas. In the steeper areas, the driving style had almost no influence on the consumption. This effect occurs again on slopes with over 5.5% average slope. On the other hand, it was found that temperature played a major role in battery consumption and charging time.
Figure 7,
Figure 8 and
Figure 9 depict the battery consumption in positive and negative percentages in relation to the average slope driven. For example, in
Figure 5 it can be seen that an offensive driving style on the steepest up-hill slope (5.75%) meant a consumption of approximately 6% of the battery (or −6%). Likewise, for a defensive driving style driven on the steepest downhill slope, there was an energy recuperation of 0.5% for the battery (or +0.5%).
If one compares the energy consumption from
Figure 7,
Figure 8 and
Figure 9, the energy consumption doubled for trips that were driven under different driving styles on the same slope. This can be seen for the average slope in the area from −5.72% to −1.64%. Additionally, differences in energy consumption lowered if the average slope rose, showing that on steep slopes, the driving style tended towards one driving style (more aggressive, getting closer to the maximum rpm mark). Avoiding steep slopes as much as possible, while keeping the driving style as defensive as possible, should be an objective in the provision of the service.
In addition, to be able to evaluate the performance of the service, digital devices are needed, which tell the exact usage of energy in relation to topography and other conditions, such as driving styles and climate conditions [
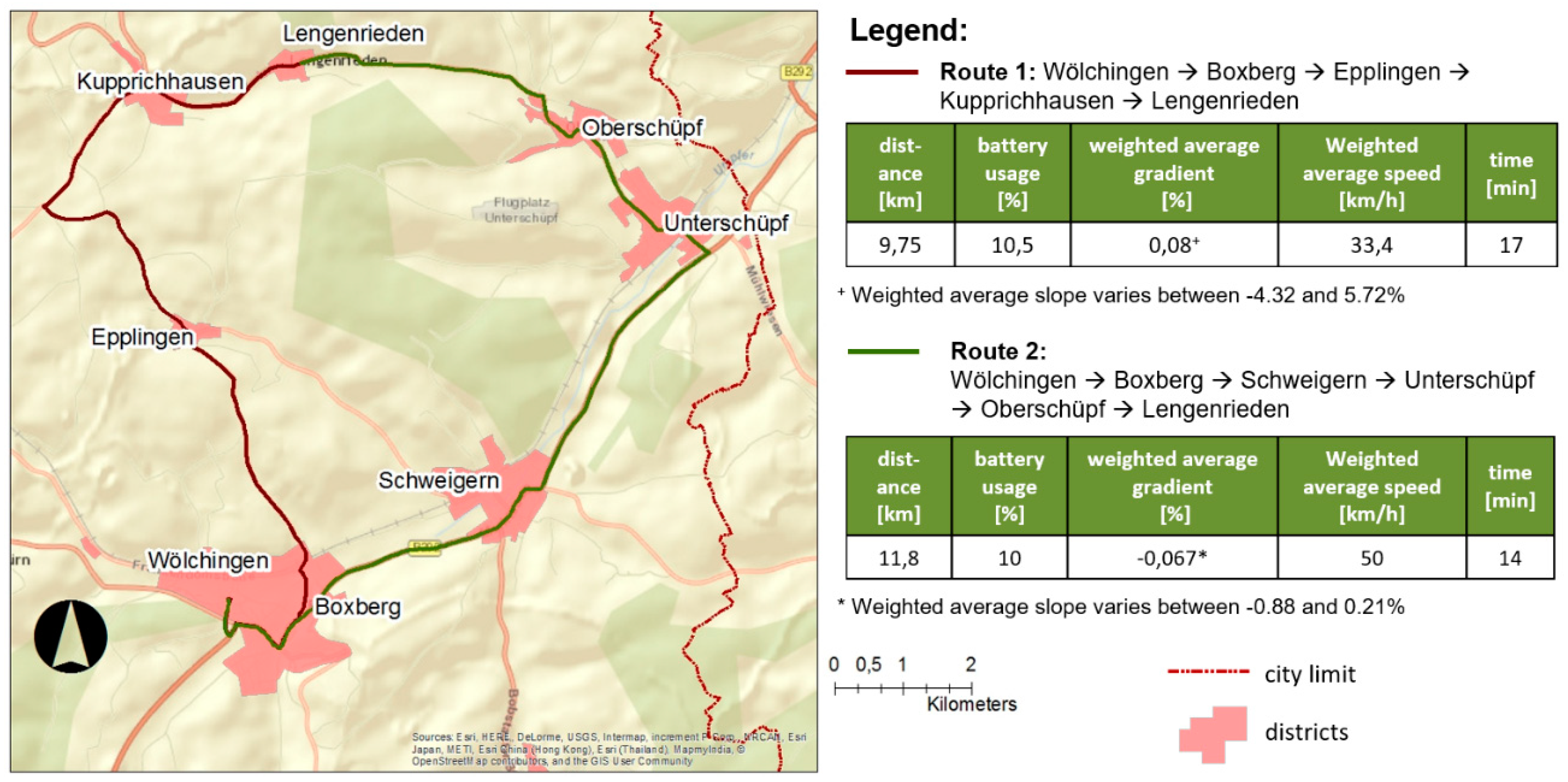
1]. For example, although routes in small towns are limited, there are a few choices that connect origins and destinations. However, the slopes and distances on the available routes might differ greatly, and so may the energy consumption.
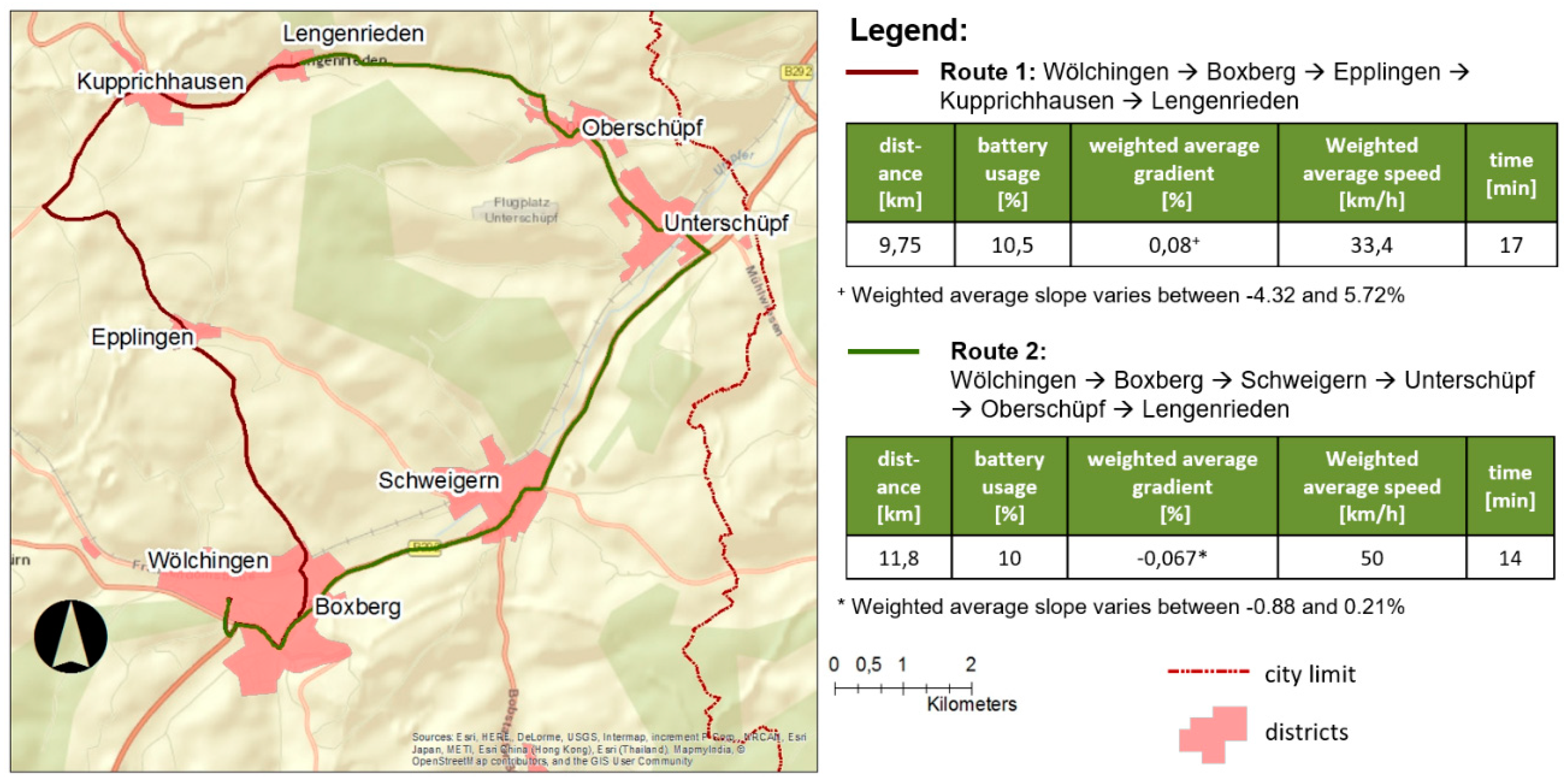
For example,
Figure 10 shows a trip with the same origin and destination, but with two different routes and overall slope. One route is shorter and is driven at lower speed on steep slopes. The other route is longer but driven at higher speeds on a much gentler slope. The electric vehicle was driven in a defensive driving style and similar weather conditions (i.e., same temperature). The trip for the shorter route consumed more energy and took longer due to the lower average speed (see
Figure 10).
A demand-responsive system requires as much availability as possible for the customers, especially for the times where no public transport is available. To achieve this, in part, fast charging is essential. Notwithstanding, suitable models for the service only offer slow charging rates (i.e., 3,7 kW). In addition, in dispersed areas, people travel long distances. It is essential that the vehicle used is able to travel longer distances before the battery needs to be charged [
1].
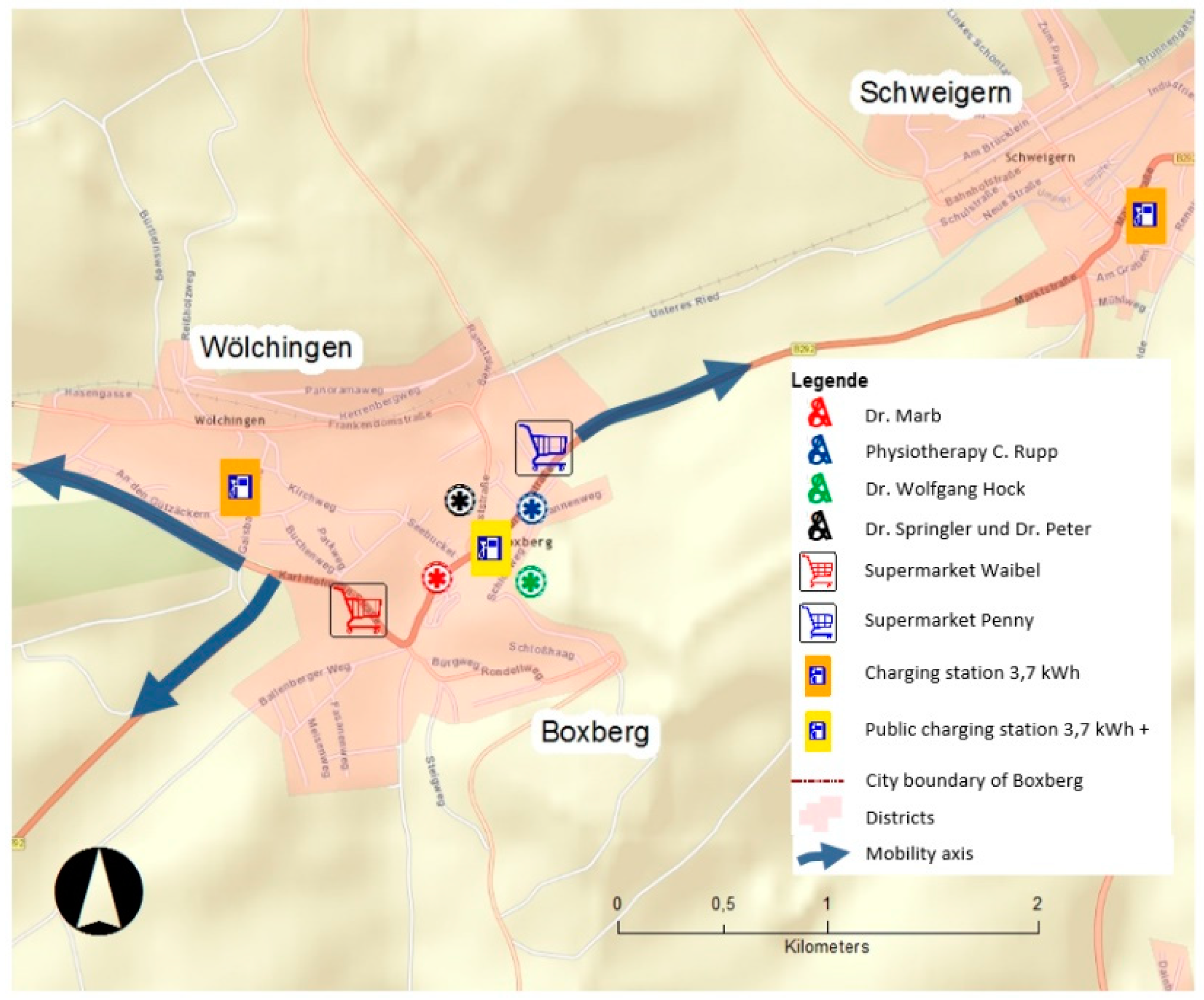
Lastly, the third aspect, the location of the charging facilities (cf.
Section 2.2) can also be evaluated. Although it might seem that the charging station location has little to do with the vehicle itself, encouraging efficient and readily accessible charging stations might help with the perception of efficiency of the service, and the performance of the vehicle among the drivers. For example, it was noticed that although the vehicle indeed required charging at midday, if charging stations were available at pauses during service hours, the vehicle would be able to be charged more readily and often, provided that the opportunity offered the service extended hours or reduced the stress of the drivers at the end of the day. It is then important that charging stations are located at strategic points that are close to the most recurrent destinations and where drivers wait the longest for clients to finish their activities (at least 30 min). In the case of Boxberg, as can be seen in
Figure 11, this occurs in an area where doctor offices are located and within a one kilometer radius around the supermarkets.
3.3. Challenges and Improvements Needed for Both Systems in General
Although the vehicles used in the studies fulfil their tasks regarding the provision of DRT service for rural areas, they do display several aspects that require improvement if efficiency and public acceptance are to be sought. This section shortly spells out the issues encountered with the EVs under study in their application to DRT systems.
The driving range is low and that the car runs out of battery quickly. To overcome this deficiency, charging at midday is required. However, the pause takes important time away from the operation. As a consequence, it is evident that more powerful batteries are needed, which seems to be the case for the new Renault Kangoo, according to the manufacturer’s website.
The charging rate is also important to put the vehicle back onto the road as soon as possible. The version bought could not be charged with a high rate charging station.
The weight is important to negotiate all types of topography, especially in the winter, when the battery runs out faster. This is especially true of the Buergerbus system (minibuses), which, besides the higher energy consumption of heavier vehicles, needs to be maintained below 3.5 tons.
The size of the vehicle and choices of vehicles is important. The transportation of people with different requirements needs to be incorporated in the design of vehicles. Accessibility of seniors, or little kids driven to their sport activities, is essential. This is especially so for the Buergerbus, where accessibility needs to be ensured to secure funding (e.g., in Germany), but also to provide the quality of service that people with mobility impairment require. Some reasons why low floors are not yet standard in this type of electric vehicles include:
- 4.1
OEMs do not see a market for this kind of vehicle except for the transportation of goods,
- 4.2
batteries are placed in the floor area of those vehicles, making it difficult to implement a lower floor, and
- 4.3
additional alternations raise the overall vehicle weight.
For the Buerger(ruf)auto, there is no way to accurately determine the use of battery. The dial is analogue. An interface connected directly to the battery would help determine the battery use and to optimize the service, especially if there is a software that could do the optimization by using the data obtained.
A leasing option for the battery or the vehicle would be helpful. In fact, the operators are creating an added value for the electric vehicle industry, and in many ways they are the promoters of the concept. Closer cooperation with associations running the system through research institutions would be beneficial.
Due to the expectancy for performance, drivers maintain their driving habits, using greater battery than otherwise; a system that advises them about their driving style in consideration to their local environment would be helpful. Such a system could be developed with the help of the data obtained from the battery, as the vehicle is in operation under different circumstances.
4. Conclusions and Outlook
As the paper presents, the use of electrical vehicles in DRT systems is well underway, but there are aspects that still need to be worked out to make the vehicles more attractive for these types of applications. The already-taken steps should be, however, encouraging to the automobile sector who, in the mind of the research community, should feel enticed to invest themselves more fully into the development of more suitable vehicles for DRT systems. A larger engagement from their part will certainly improve the impression of society to a point at which the technology would be better accepted as a viable solution, not only for DRT applications, but for others as well.
Additionally, in the digital age, there are numerous ways to improve EV efficiency for DRTs through software and hardware solutions such as intelligent sensors, big data, or artificial intelligence. With the help of user friendly apps and their interconnectivity with superior platforms from public transportation providers, customer experience can be increased while maintaining or increasing the efficiency of DRT systems at the same time. An important aspect to keep under the radar is the introduction and use of autonomous vehicles. This technology has the potential to change the landscape of public transportation, especially in rural areas [
12]. DRTs can set the path for the acceptance of this increasing technology from a user perspective—regardless of whether they are fully flexible or whether they are operated with demand-oriented schedules and times. Under these premises, DRT systems certainly should be seen and considered as a sensitive and attractive showcase for EVs.

 and
and 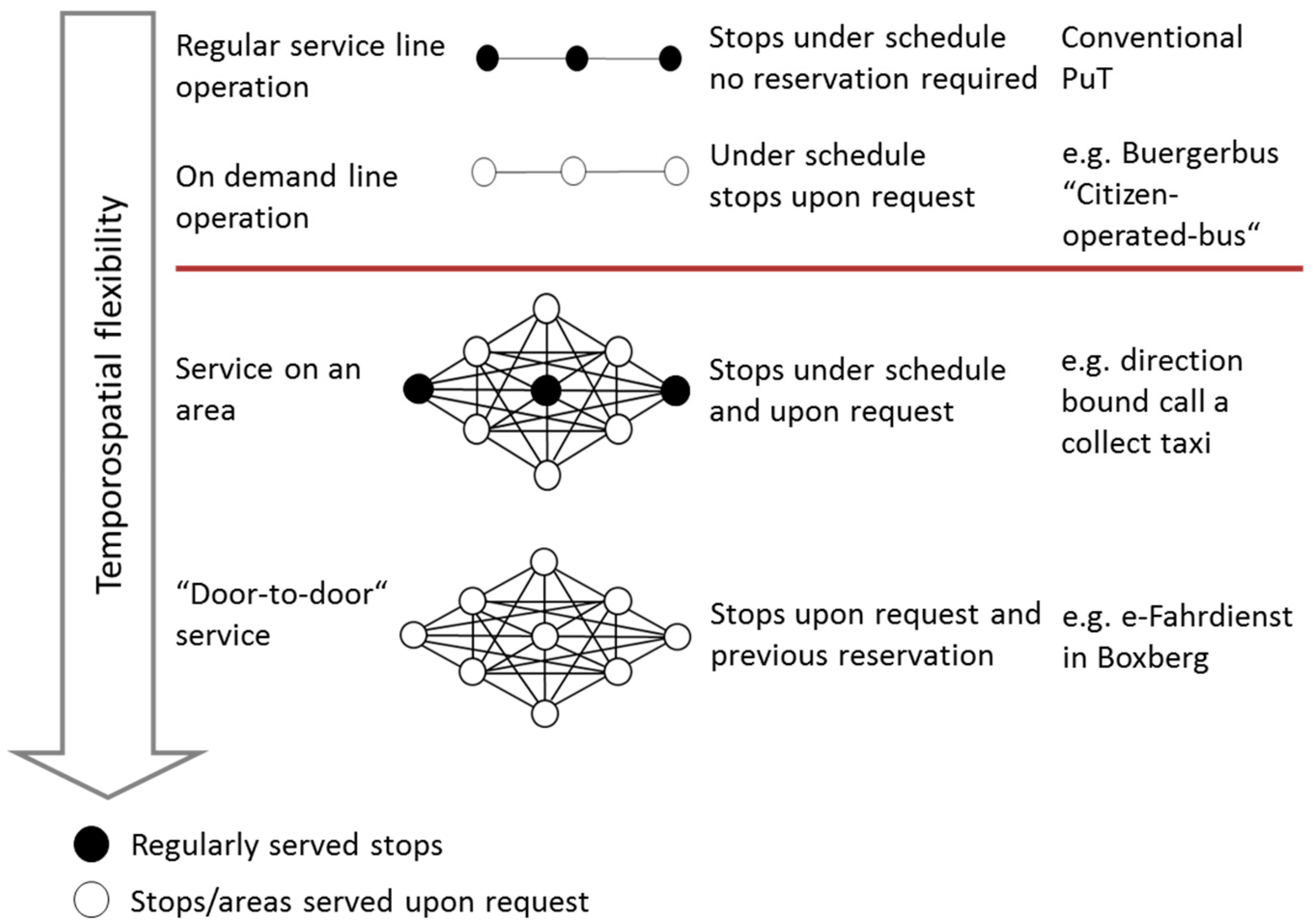



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}