1. Introduction
In the fall of 2016, the municipality of Ooststellingwerf ran a pilot with automated vehicles on the bicycle lane near Appelscha, the Netherlands. The goal of the case study was to provide insight into the pilot and the challenges involved. Future pilots can learn from the challenges in Appelscha and from the decisions (including their outcome) made by the municipality. In short, it can be concluded that the bicycle lane in Appelscha was not suitable for these automated vehicles due to the width of the bicycle lane. No accidents occurred during the pilot.
2. Materials and Methods
The case study research method was used to investigate the Appelscha case within the real-life situation. Data for the Appelscha case study was gathered online (when publicly available) and, to get more in depth and detailed information, by conducting interviews with the parties involved. The municipality of Ooststellingwerf, the RDW (Dienst Wegverkeer, translate: Netherlands Vehicle Authority), and a private consultant provided extra documentation and extra information. Some of these documents are not publicly available.
3. Results
In recent years, media coverage on automated driving has increased. Moreover, automated vehicles have become a hype according to the Gartner hype cycle [
1]. The expectations surrounding automated driving are high. Research has shown that automated vehicles are presumed to be safer then human drivers [
2], are likely to increase traffic flow [
3], and can contribute to the transition to more sustainable modes of transport [
4]. However this research is only theoretical. More and more research is being conducted in regards to the effects of automated driving, but there is a knowledge gap when it comes to research about the practical implementation of the automated vehicles. One of the conclusions from Dimitris Milakis, Bart van Arem, and Bert van Wee [
5] in their paper was that more empirical studies about the first-order implications of vehicle automation are a priority as the automated driving technology evolves. With this case study, the authors wish to contribute to the knowledge gap regarding practical implementation and to help the development of automated vehicles from experiments to more permanent implications. This case study is one of the case studies conducted within the Spatial and Transport impacts of Automated Driving (STAD) project and the first (as far as the authors know) in the Netherlands.
3.1. Background of the Case
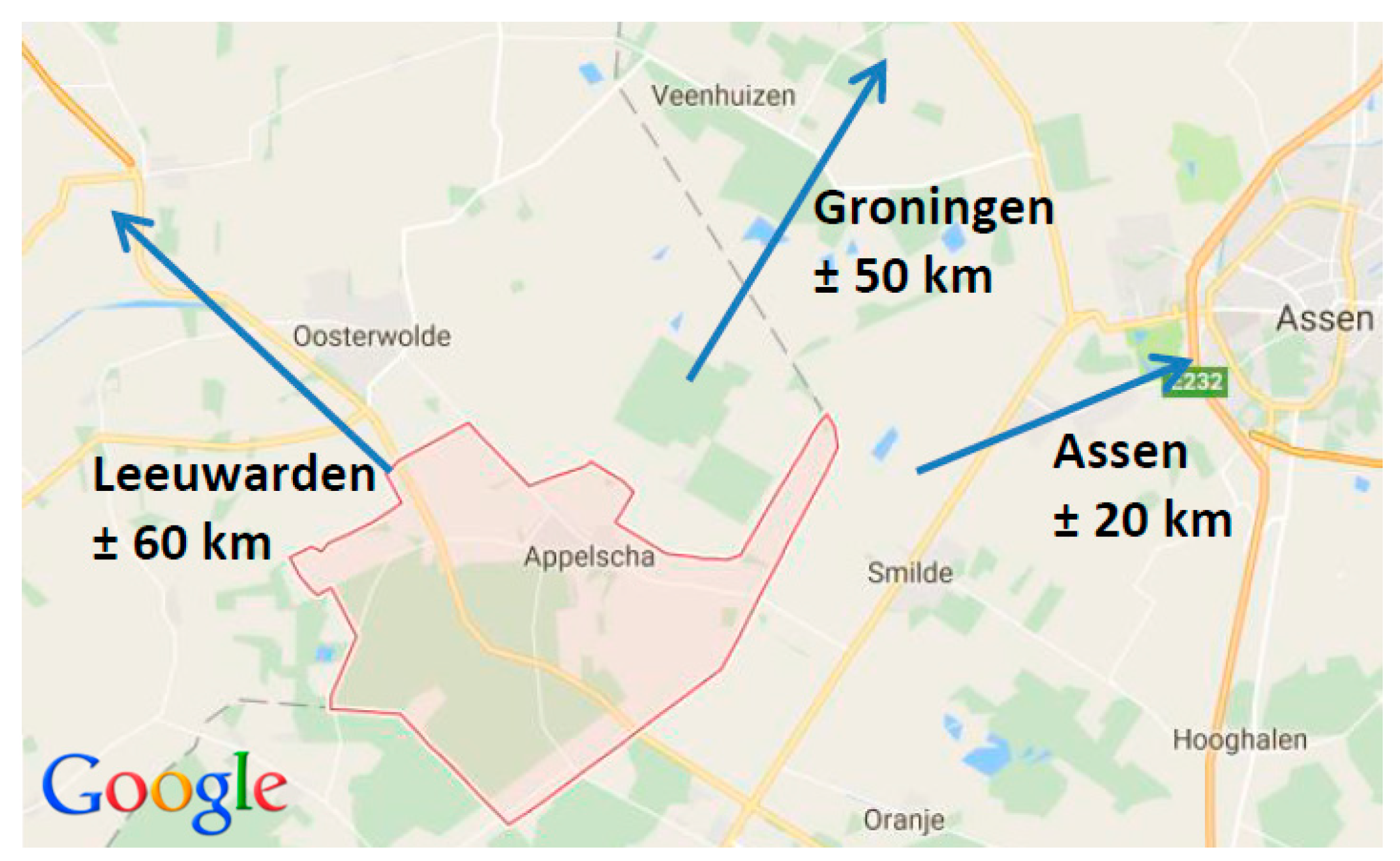
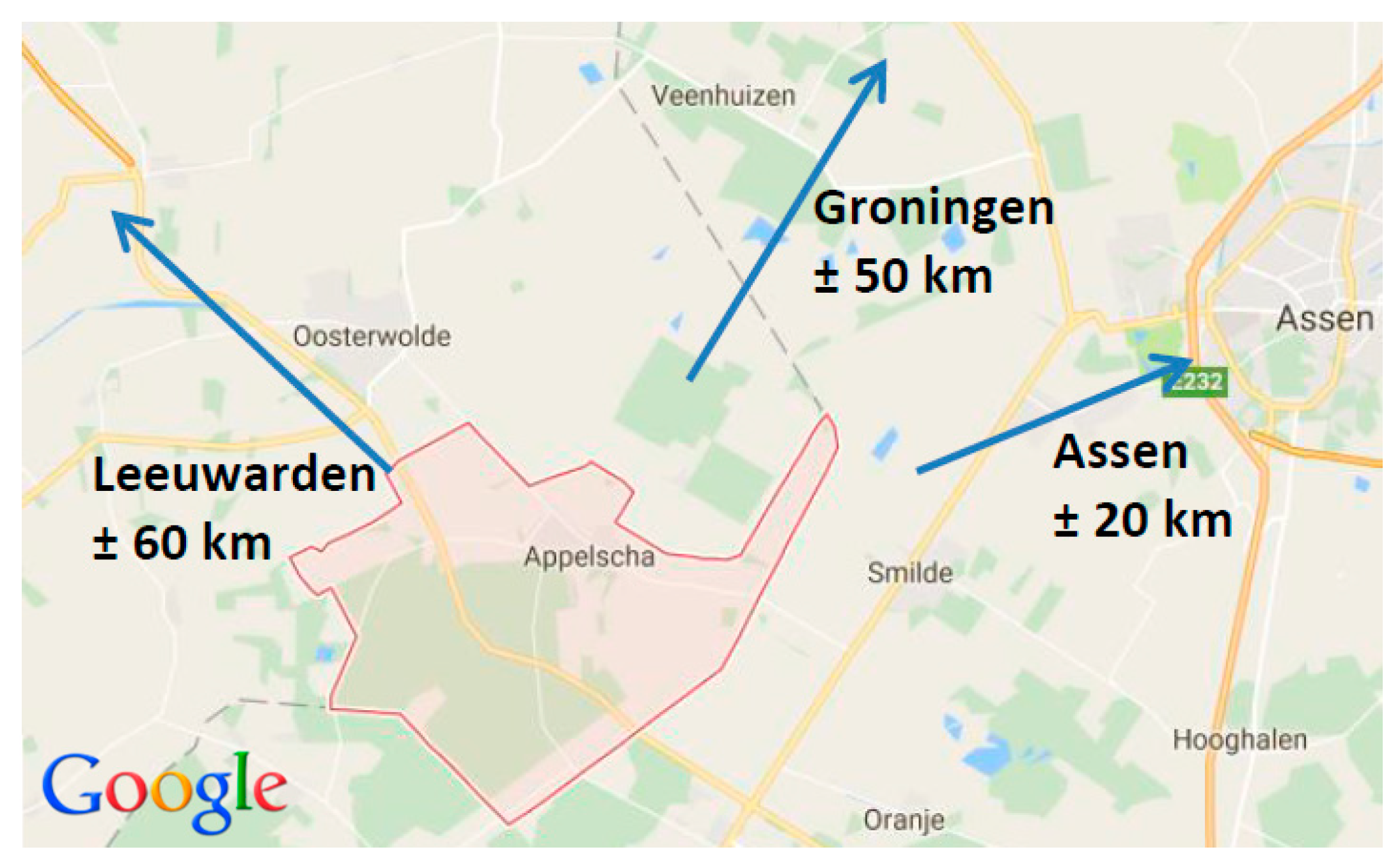
Appelscha is a village in the region of Ooststellingwerf, Friesland NL. Appelscha is located in a rural area with the closest city Assen, the capital of the province of Drenthe, at 20 kilometre distance (see
Figure 1). Appelscha is part of the municipality of Ooststellingwerf and has approximately 5000 inhabitants. Almost 25% of these inhabitants are over 65 years old. One of the future challenges for the municipality of Ooststellingwerf is the predicted decline of inhabitants [
6]. Amenities are under pressure and are only available in the bigger villages. The decline of inhabitants will make the regular bus line, which is barely viable now, no longer viable. The public transport network is already shrinking in this area due to a lack of users. To preserve good accessibility in the region, especially for the disabled and elderly, the municipality considered the possibilities of automated transport. This type of transport can be cheaper because there is no need for a driver and this type of transport can offer ‘on demand’ service. The sustainability of automated vehicles, which are electrical, coincides with the goal of zero emission by 2030 as set by the municipality of Ooststellingwerf.
3.2. Goal of the Pilot
A pilot with an automated electrical vehicle was conducted to find out if this type of vehicle could be the future mode of transportation, without any infrastructural changes, in rural regions of the Netherlands. Also, the pilot was conducted to gather some insights into how people in and outside the vehicle responded towards the vehicle. The municipality started the pilot with the following research questions:
What are the legal challenges in regards to setting up a pilot with an automated vehicle?
What technical aspects need to be taken care of before starting a pilot or demonstration?
What part of the road is most suitable to facilitate such vehicle?
How can the vehicle be integrated in its surroundings?
Also, the municipality was interested in exploring different types of employment in regards to automated vehicles. The motto of the municipality was ‘learning by doing’ [
8].
3.3. The Vehicle
The automated electric vehicle that was used for this case was a prototype of the EZ10 from Easymile. This is a SAE-level 4 vehicle because it can drive automated on certain routes, which must be mapped in the vehicle. The vehicle is not (yet) able to drive on any road at any time. The municipality rented two vehicles for the duration of the pilot, starting from the 13 September up until the 31 October. The supplier, Easymile, made sure the vehicles met the requirement set by the Dutch Vehicle Approval Authority, which is known as RDW. Some of the adjustments Easymile made were to make sure the doors of the vehicle could always be opened while standing still, but not while driving. Also, according to the law, which regulates the requirements vehicles have to meet, the exterior of the vehicle cannot contain any sharp edges or other edges, which might cause severe injury when involved in an accident [
9]. The municipality agreed with RDW not to drive during rain because the rain might affect the sensor detection. The Citymobil2 project consisted of multiple pilots across Europe. During this project some vehicles drove during rain. The Citymobil2 project concluded that rainfall had more of an effect on the sensors than anticipated. Furthermore, heavy rain and hail was often detected as an obstacle [
10].
Figure 2 shows the vehicle that has been used for the pilot in Appelscha.
The Easymile EZ10 vehicle is capable of transporting up to twelve people. The vehicle has six seats and six standing positions. During this pilot the vehicle was allowed to transport six sitting passengers due to safety reasons. The vehicle does not have a steering wheel and can only be manually operated by a joystick. The maximum speed of the vehicle is 40 km/h. The EZ10 vehicle has a Lithium-ion (LiFeP04) battery that can operate for up to 10 hours [
12]. To drive autonomous the vehicle uses several cameras and sensors, a GPS tracking system, a collision detection system, and a LIDAR radar.
3.4. Route of the Vehicle
The automated electric vehicle was set to drive from the visitor centre of the Forestry Commission (Bezoekerscentrum Staatsbosbeheer) to the roundabout, which gives entry to the village of Appelscha. The distance between these destinations was approximately 2.5 km. Easymile, the supplier of the vehicles, conducted a site assessment. The municipality of Ooststellingwerf and Easymile agreed that, regarding the maximum speed of 15 km/h, the vehicle should drive on the separate cycle track next to the main road. This separate cycle track is mostly used as a recreational route and is part of different cycling routes in the area. The cycle track also accommodates commuter traffic. Other users of the cycle track are students as there is no high school/college/university in Appelscha. The municipality has counted the number of cyclists in June 2016 and concluded that there were 350 till 500 cyclists per day on that specific cycle track. In comparison, a cycle lane in the metropolitan region of Rotterdam – The Hague and Schiedam had 2600 cyclists per day in 2014 [
13].
To prepare the separate cycle track for the vehicle there were some, relatively, small, adjustments. The municipality constructed some overtaking lanes where the vehicles could safely pass each other. Other adjustments were made regarding warning other road users about the automated vehicles. There were painted signs on the bicycle lane with a picture of the vehicle to warn cyclists that they might cross paths with the vehicle. There were also warning signs next to the cycle lane. Matrix signs were placed at crossing points with the exits of the expressway, N381. A temporary (yellow) yield line was placed for the vehicles coming from or entering the expressway, N381, to give way to the road users on the separate cycle lane. Also, an information board at the start of the route was placed to provide information about the automated vehicle driving in the area.
Figure 3 shows some of these warning signs.
The width of the separate cycle lane was between 2.70 m and 3.10 m. The width of the vehicle was 1.99 m. This means that the space remaining for the cyclists varies from 0.71 m to 1.11 m. The average space a cyclist needs to overtake depends on the type of cycle lane, width of the cyclist, fear of obstacles, and the natural swerving of the cyclist due to weather conditions, age, or speed. The standard width of cyclists is 0.75 m and cyclists will need at least 0.25 m to pass or overtake other cyclists. Regarding fear of obstacles, 0.25 m to 0.75 m is needed for cyclists to comfortably cycle past obstacles. The distance to the obstacle depends on the type of obstacle. Cyclists will maintain more distance to a wall then small bushes. Taking all the above into consideration, CROW advises, in their guidelines, a minimal space of 1.20 m for cyclists to cycle comfortably (these guidelines from CROW are commonly used in road design and are well accepted in The Netherlands) [
15].
When the vehicle started driving to study the route, the sensors picked up objects on the side of the cycle lane. Garden fences, low branches, and high grass made the vehicle slow down or triggered the emergency brake. During the pilot the municipality made sure the grass on both sides of the cycle lane was cut so the vehicle would not detect the grass as an object. Branches from trees and bushes on both sides of the cycle lane were cut back for the same reason. Also, the position of the vehicle on the cycle lane had to be adjusted. Therefore, the vehicle maintained a 20 cm distance to the side of the cycle lane, the so-called ‘virtual space’. This virtual space meant less space for the cyclist to pass or overtake the vehicle. The evaluation report (not publicly available) from RDW and the municipality stated that the cycle lane in this situation was, in retrospect, not suitable to facilitate both the vehicles and the cyclists. The questionnaires filled in by the users of the vehicle and other road users conclude the same; the vehicle should not be on the cycle lane in this situation. Apart from the non-suitable cycle lane, the idea of using the automated vehicles was positively received by the public.
Figure 4 shows the position of the vehicle on the cycle lane.
3.5. Legal
To be able to drive with an automated vehicle on the Dutch roads, a permit from RDW is mandatory. Without a permit from RDW driving is illegal. In this case, two permits were given; one permit to drive on the separate cycle lane and one permit to be allowed to transport people in the vehicle. Because this vehicle is a level 4 vehicle, it needs to learn the route. The first permit allows the vehicle to drive and explore the route. To transport people in the vehicle, RDW must make sure that the vehicle is well adjusted to its route. The virtual space slowed the progress towards the second permit. Extra safety precautions were needed to be allowed to transport people. This demanded flexibility, creativity, and an analytical way of thinking from the municipality.
The municipality hired traffic controllers and placed extra warning signs to inform cyclists and other road users that they could encounter this automated vehicle. They explicitly added the fact that the vehicle will not swerve around cyclists and requested cyclists to keep one metre distant from the vehicle when passing or overtaking it. The municipality had noticed that cyclists found it sometimes confusing when they approached the vehicle if it was going to make space for the cyclists, which it did not. More information about the way the vehicle reacts was spread on local media and the extra warning sign stating that the vehicle will not swerve around cyclists took away some of that confusion. Also, the traffic controllers outside the vehicle and the steward inside the vehicle provided information about the vehicle. This increased the goodwill of the inhabitants of Appelscha and other road users. After providing extra information to the public, hiring traffic controllers to inform other road users, and placing extra warning signs, the municipality received permission to transport people in the vehicle.
3.6. Public Response
The contact between the automated vehicles and the cyclists gave some friction. The evaluation report from RDW (not publicly available) reveals that cyclists and other road users find the vehicle unpredictable. They found the vehicle, especially, unpredictable at the start and the end of the route due to the ability of the vehicle to change its driving direction at the end of the track without turning. It was also noted that, when the vehicle had to turn, the indicator of the vehicle switched on when the vehicle was already turning. The driving direction and the ability to change driving direction without turning caused some ambiguity with cyclists and other road users.
Due to the speed of (up to) 15 km/h, cyclists found it difficult to determine if they should overtake the vehicle. Especially, faster cyclists got frustrated. During the project, it has been noted that communication regarding the behaviour of the vehicle and its maximum speed was important. This is consistent with the observations regarding the acceptance made in the Citymobil2 project [
10]. The RDW and the municipality of Ooststellingwerf have experienced that the use of traffic controllers could contribute to providing information. The steward inside the vehicle also played an important role in providing information to the public in Appelscha, which was also seen in the Citymobil2 project [
10]
It was also noted that road users seemed more alert when the matrix boards were in operation. As the project progressed, cyclists seemed more used to the vehicle and knew they had to swerve around the vehicle. The road users on the road next to the separate cycle lane were curious about the vehicle. They slowed down and tried to take pictures and/or movies. Their attention was drawn from the road to the vehicle and caused some delay, but no accidents occurred during the pilot.
During the pilot, there was the possibility to fill in a questionnaire. There were two questionnaires available: A road user questionnaire and a questionnaire for the users of the automated vehicle. Some of the results of both questionnaires are mentioned above. The questionnaire for road users has been filled in 20 times and the questionnaire for the users of the vehicle 50 times.
4. Discussion
This pilot has provided insights into the requirements which that need to be met to let automated electrical vehicles drive on cycle lanes. Due to the unexpected ‘virtual space’, the vehicle had to keep 20 cm distance to the side of the cycle lane. The cycle lane, as in the situation at Appelscha, was too narrow to facilitate both vehicles and cyclists, and, therefore, the cyclists had to move to the roadside to overtake the vehicles or to let the vehicles pass. This is consistent with one of the lessons learned from the Citymobil2 project, namely that, “it is important to limit the initial ambition of the route and to be aware of the limits of the system to be implemented. The reality is very often more demanding in practice” [
10].
The results from the questionnaire show that other road users and cyclists believe that the vehicles should not have been on the cycle lane, but the results also show that the public does believe in a future for automated electrical vehicles. The municipality had to be flexible and had to deal with sudden problems. The ‘can do’ attitude from the municipality made this pilot happen. Considering this experience in Appelscha; do we need more ‘learning by doing’ in pilots on public roads for the transition of Automated Driving?
Author Contributions
B.v.A. and F.R. supervise Reanne Boersma in the STAD project. R.B. conducted the case study and wrote the manuscript. B.v.A. and F.R. helped develop the framework for the case study and provided substantive feedback on the manuscript.
Funding
This research received no external funding. This research was conducted as part of workpackage 7 of the STAD project.
Acknowledgments
The work reported in this paper was conducted as part of Work package 7 (WP7) of the Project “Spatial and Transport impacts of Automated Driving (STAD)” [
17]. STAD is part of the program Smart Urban Regions of the Future (SURF) ran by VerDus on behalf of the Netherlands Science Foundation NWO. One of the objectives of WP7 is learning from current pilots with automated vehicles. Multiple case studies of different cases will lead to an overall lessons learned. Other case studies are regarding the WEpod project (will be published shortly), the Rivium ParkShuttle (will be published shortly) and the potential case near Rotterdam the Hague Airport [
18]. The case of Appelscha is one of the case studies conducted within WP7. The authors would like to thank Oscar Weehuizen and Arjan Janssens from the municipality of Ooststellingwerf for providing information about the project. Also, the authors would like to thank Pieter van der Stoep from RDW for providing information about the mandatory permits and for giving insights in the collaboration with all the involved parties. Furthermore, the authors would like to thank Frans Hamstra from Drietachtig for providing information about the project and the parties involved.
Conflicts of Interest
The authors declare no conflict of interest. The founding sponsors had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, and in the decision to publish the results.
References
- Gartner. Gartner’s 2015 Hype Cycle for Emerging Technologies Identifies the Computing Innovations that Organizations should Monitor; Gartner, Inc.: Stamford, CT, USA, 18 August 2015; Available online: https://www.gartner.com/newsroom/id/3114217 (accessed on 7 June 2018).
- Fagnant, D.; Kockelman, K. Preparing a Nation for Autonomous Vehicles: Opportunities, Barriers and Policy Recommendations. Transp. Res. Part A 2015, 77, 167–181. [Google Scholar] [CrossRef]
- Stern, R.; Cui, S.; Monache, M.; Bhadani, R.; Bunting, M.; Churchill, M.; Hamilton, N.; Haulcy, R.; Pohlmann, H.; Wu, F.; et al. Dissipation of stop-and-go waves via control of autonomous vehicles: Field experiments. Transp. Res. Part C 2017, 89, 205–221. [Google Scholar] [CrossRef]
- Rieck, F.; Machielse, C.; van Duin, J. Automotive, the Future of Mobility. Presented at the EVS30 Stuttgart, Stuttgart, Germany, 9–11 October 2017. [Google Scholar]
- Milakis, D.; van Arem, B.; van Wee, B. Policy and society related implications of automated driving: A review of literature and directions for future research. J. Intell. Transp. Syst. 2017, 21, 324–328. [Google Scholar] [CrossRef]
- Bevolkingskrimp—Krimpgebieden en Anticipeergebieden. Available online: https://www.rijksoverheid.nl/onderwerpen/bevolkingskrimp/inhoud/krimpgebieden-en-anticipeergebieden (accessed on 10 February 2017). (In Dutch).
- Search: Appelscha. Available online: maps.google.com (accessed on 17 February 2017).
- Pilot Zelfrijdend Vervoer in Appelscha [Video]. Available online: https://www.youtube.com/watch?v=GwdL38hTmWY (accessed on 10 February 2017). (In Dutch).
- Article 5.2.48 Regeling Voertuigen. Available online: http://wetten.overheid.nl/BWBR0025798/2018-05-20#Hoofdstuk5 (accessed on 6 June 2017). (In Dutch).
- Allessandrini, A. Experience and Recommendations; Citymobil2: Rome, Italy, 2016; Available online: www.citymobil2.eu/en/downloads/public-deliverables/ (accessed on 6 June 2018).
- Noorden Maakt Werk van Zelfrijdend Vervoer. Available online: https://www.provinciegroningen.nl/actueel/nieuws/nieuwsbericht/_nieuws/toon/Item/noorden-maakt-werk-van-zelfrijdend-vervoer/ (accessed on 10 February 2017). (In Dutch).
- Lee, M. EZ10 Driverless Electric Bus; Digitimes Inc: Taipei, Taiwan, 2017. Available online: https://digitimes.com/contact.asp (accessed on 15 June 2018).
- Gemeente Schiedam. Concept Uitvoeringsprogramma Fietsen 2016–2020; Gemeente: Schiedam, The Netherlands, 2016. Available online: https://www.schiedam.nl/Docs/inwoners/Verkeer%20en%20parkeren/Fietsprogramma/Concept%20Uitvoeringsprogrammas%20Fietsen%202016%20-%202020%20Schiedam%20%20160401.pdf (accessed on 15 June 2018). (In Dutch).
- Compactmedia. Pilot Zelfrijdend Voertuig van Start in Appelscha. Available online: http://www.compactmedia.nl/2016/09/17/pilot-zelf-rijdend-voertuig-van-start-in-appelscha/ (accessed on 10 February 2017). (In Dutch).
- De Groot, R.; CROW Kenniscentrum voor Verkeer, Vervoer en Infrastructuur. Design Manual for Bicycle Traffic; CROW-Fietsberaad: Ede, The Netherlands, 2017; Available online: http://www.fietsberaad.nl/index.cfm?lang=en&repository=Design+manual+for+bicycle+traffic (accessed on 7 June 2018).
- De Groot, K. Zelfrijdende Busjes Maken Proefritjes in Appelscha. Available online: https://www.dekrantvanmiddendrenthe.nl/nieuws/regio/459874/zelfrijdende-busjes-maken-proefritjes-in-appelscha (accessed on 10 February 2017). (In Dutch).
- Spatial and Transport Impacts of Automated Driving. Available online: http://stad.tudelft.nl/wordpress/ (accessed on 8 February 2017).
- Boersma, R.; Kort, M.; van Arem, B.; Rieck, F. Casestudy Rotterdam the Hague Airport: Een Analyse van de Toepassing van Automatisch Vervoer bij Rotterdam the Hague Airport als Onderdeel van de Aanbesteding ‘Marktplaats voor Infrastructuur’; Technische Universiteit Delft & Hogeschool Rotterdam: Delft, The Netherlands, 2017; Available online: http://stad.tudelft.nl/wordpress/?page_id=534 (accessed on 6 June 2018). (In Dutch)
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).



{kind=link}
{kind=link}
{kind=link}
{kind=link}