1. Introduction
With the global transition of energy structures and growing awareness of environmental protection, electric vehicles (EVs) have become an innovative alternative to traditional fuel vehicles. According to the Global EV Outlook 2025 released by the International Energy Agency (IEA) [
1], global electric car sales exceeded 17 million in 2024, accounting for more than 20% of new vehicle sales. China remains the largest market, contributing over 60% of global EV sales and hosting around 65% of public charging points. In contrast, growth in Europe and the United States has slowed due to reduced subsidies and unchanged emissions targets. These trends highlight the increasing importance of EV infrastructure. As the interface between EVs and the grid, the on-board charger (OBC) plays a critical role in determining charging efficiency and system reliability. It is responsible for converting grid-side alternating current (AC) into direct current (DC) suitable for charging the traction battery, and has thus become a major focus of ongoing research.
The OBC mainly consists of a front-stage AC/DC conversion and a rear-stage DC/DC conversion [
2]. The front-stage AC/DC circuit performs power factor correction (PFC) and voltage conversion. It ensures that the input current remains synchronized with the grid voltage and reduces harmonic pollution to the grid. The rear-stage DC/DC circuit adjusts the DC voltage from the front stage to match the needs of the battery. It also provides electrical isolation and charging control. With the deep integration of smart grids and electric vehicles, OBCs are shifting from unidirectional charging to bidirectional energy exchange. V2G refers to discharging energy from the EV battery back to the grid to support peak shaving and frequency regulation. G2V represents the conventional charging process from the grid to the vehicle. These bidirectional energy flow modes place stricter requirements on the front-end converter of the OBC. First, the bidirectional flow of energy requires the converter to support power transfer in both directions. Second, grid connection standards require high-quality current waveforms and good PFC performance from the converter [
3].
Compared with traditional two-level topologies, multilevel topologies, especially three-level topologies, have clear advantages. The total DC bus voltage is divided among multiple switching devices. This division reduces the voltage stress and the voltage change rate on each device. As a result, harmonic generation decreases, and the cost of passive filters is lowered [
4,
5]. At the same time, the three-level structure produces lower output voltage distortion. It also improves the THDi, enhancing overall power quality.
Although the three-level topology has many advantages, some problems still remain. First, it needs more power semiconductor devices, which increases the cost. Second, because the DC link is split, the NP voltage imbalance can degrade system performance. If a voltage imbalance occurs between the upper and lower DC-link capacitors, the output voltage waveform becomes distorted. Extra harmonic components may appear. Some devices may be exposed to excessive voltage stress. These problems reduce system efficiency and reliability [
6].
The control strategy plays an important role in both V2G and G2V modes [
7]. There are many control strategies for single-phase converters. Proportional-Integral (PI) control is a commonly used method. However, when the grid frequency drifts, tracking error increases, especially under dynamic scheduling in V2G applications [
8]. Proportional-Resonant (PR) control may increase noise peaks in the system’s output spectrum. This often makes it difficult to meet grid connection standards [
9,
10]. Repetitive control is a steady-state control method derived from the internal model principle, enabling the output waveform to accurately follow the periodic reference signal. However, its main drawback is slow dynamic response. These methods are often not suitable for complex power electronic systems with multiple variables and constraints [
11]. Super-Twisting Sliding Mode Control offers fast response and strong disturbance rejection. However, it requires many parameters and repeated trial-and-error tuning [
12,
13]. In recent years, MPC has been widely studied in the field of power electronics. As a feedforward optimization control method, it can achieve multi-objective control while meeting system constraints [
14]. To address the NP voltage balancing problem, an effective method is to embed proper weighting factors into the cost function [
15].
Although MPC provides multi-objective optimization capability, the selection of multiple weighting factors and its stability analysis still involve many uncertainties. In most cases, weighting factors are selected based on experience [
16,
17], yet they play a critical role in shaping the performance of power electronic controllers. Therefore, eliminating weighting factors entirely is a better way to reduce their influence on the control system. Reference [
18] determines the voltage imbalance by evaluating the output current tracking error, which avoids directly sampling the voltages of the two capacitors. This reduces system cost and complexity. However, it may be difficult to detect faults in time if components fail. Reference [
19] presents a sliding mode control approach that independently regulates the capacitor voltage and inductor current to their respective reference values, thus eliminating the need for weighting coefficients. However, this method is not suitable for single-phase three-level converters. Reference [
20] avoids the use of weighting coefficients by forcing all control objectives to converge within a bounded invariant set. However, its strategy is too complex. These approaches focus solely on control methods and often involve complicated procedures.
To address this problem, a dedicated voltage balancing circuit can be added at the hardware level. Reference [
21] proposed a voltage balancing circuit with flying capacitors for a diode-clamped five-level converter. This circuit achieved fast balancing of the DC-side capacitor voltages and stabilization of the NP voltage. However, its complex structure increases hardware cost, and the state machine control adds to the complexity of the control strategy. Some three-level inverter topologies inherently provide self-balancing of capacitor voltages. In the scheme of [
22], a hybrid Cuk-Sepic DC-DC stage is used at the front end, which can automatically balance its two output voltages. As a result, the inverter’s performance is not affected by NP voltage imbalance. The approach in [
23] uses a switched capacitor module, which connects split capacitors in parallel when outputting the semi-DC loop voltage to achieve voltage balancing. However, this method is only applicable to specific circuit topologies and lacks general applicability.
Traditional three-level converters rely on passive balancing strategies, which adjust the NP current direction by using the redundancy of switching vectors. However, this strategy is limited in effectiveness under the frequently changing load conditions typical of OBCs. To address this problem, this study proposes an improved solution by adding a third leg to the single-phase three-level topology. By actively controlling the third leg, the NP current can be directly regulated, thereby dispensing with the need for complex control algorithms and the use of weighting factors. This significantly enhances the stability and response speed of NP voltage balancing.
The remainder of this paper is organized as follows.
Section 2 provides a detailed introduction to the mathematical model of the single-phase three-level topology.
Section 3 discusses the mathematical model of the third leg and the active NP voltage balancing method.
Section 4 verifies the proposed strategy through results and analysis.
Section 5 presents the conclusion of this paper.
2. Mathematical Model
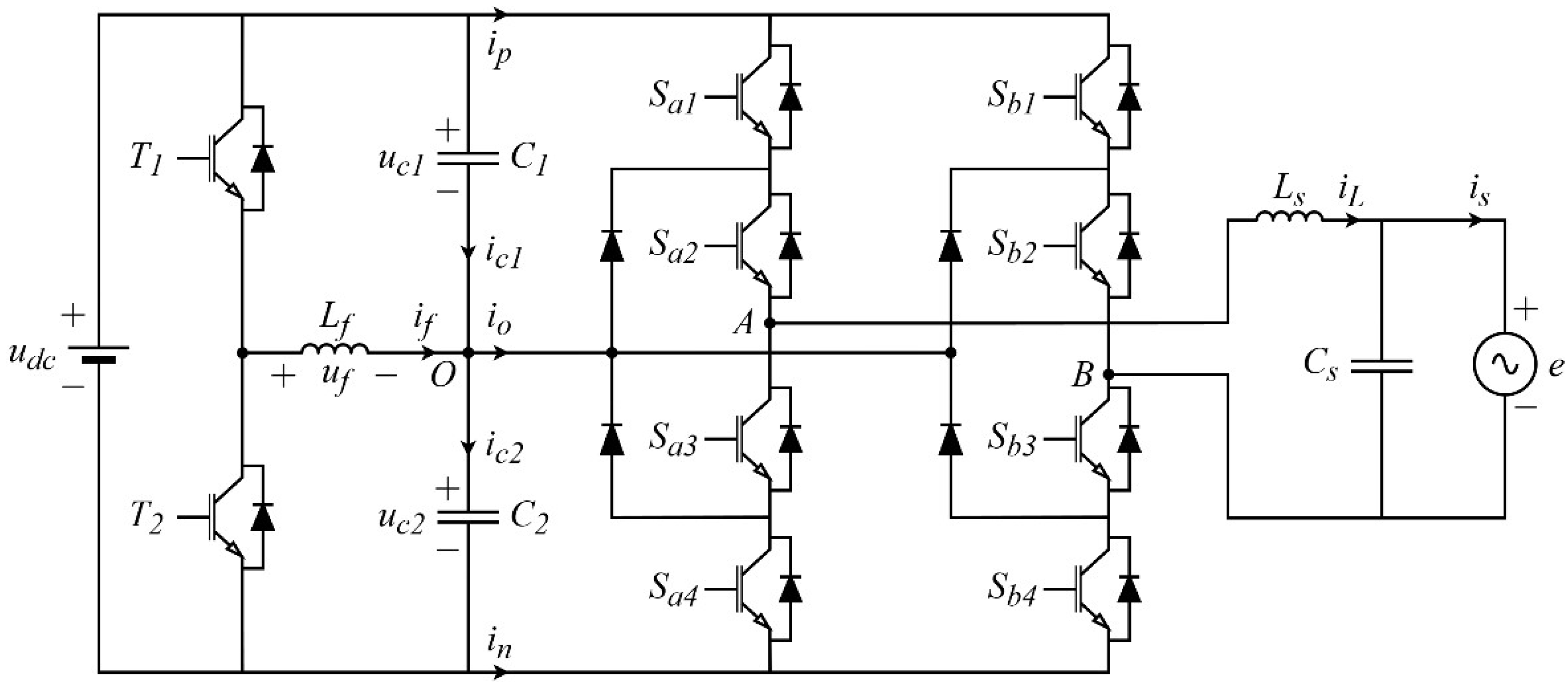
The topology of a single-phase three-level converter with three legs is illustrated in
Figure 1. The variable
denotes the DC bus voltage on the EV side, which typically originates from the traction battery and the DC-DC converter. A current
is injected into the midpoint of the DC bus via two power switches,
and
, and an inductor
. This balancing leg is responsible for regulating or balancing the voltages
and
across the upper and lower DC bus capacitors,
and
, respectively. The central part of the circuit is a single-phase three-level converter composed of two bridge legs, A and B. The corresponding switching devices are
and
. The midpoint of the DC capacitors, denoted as point
, serves as the DC-side NP and enables three-level voltage output. On the AC side, the output is connected through an LC filter consisting of an inductor
and capacitor
, along with an AC voltage source
. The variables
and
represent the current through the filter inductor and the current on the AC side, respectively.
The single-phase three-level converter topology includes two main inverter legs. Each leg consists of four switching devices and two clamping diodes, and supports three distinct switching states, defined as
, where
. The detailed switching combinations for each state are presented in
Table 1.
Based on the defined switching states, a total of nine distinct voltage vectors can be derived for the converter. The converter’s operating characteristics corresponding to various switching states are summarized in
Table 2.
Under ideal conditions, it is typically assumed that the voltages across the upper and lower DC-side capacitors,
and
, in a single-phase three-level converter, are balanced. However, in practical operation, these two voltages are often not exactly equal. As a result, based on the switching states shown in
Table 2, the terminal voltages can be expressed as functions of the switching and the capacitor voltages, as given below
The power switches are assumed to operate under ideal conditions. During the commutation process, all switching devices are considered free of switching losses and energy storage. Based on this assumption, the instantaneous power on the AC side and the DC side is considered balanced, leading to
represents the current flowing out of node p on the DC side, and denotes the current flowing out from node n on the DC side.
Substituting Equation (3) into Equation (4), the comparison yields
Applying Kirchhoff’s Current Law to the capacitors and their DC side gives the following equations
MPCC and MPPC Algorithms
In recent years, extensive research has been conducted on methods for generating virtual orthogonal components from single-phase signals. Common techniques include 90-degree phase shifting, the Hilbert transform, all-pass filters, and the Second-Order Generalized Integrator (SOGI) [
24]. Among these, SOGI has emerged as a widely adopted method due to its structural simplicity, favorable dynamic characteristics, and strong capability to suppress harmonics and mitigate the effects of frequency deviations. Building upon this, the integration of SOGI with a Phase-Locked Loop (PLL) yields the SOGI-PLL structure, which further improves the accuracy of amplitude, phase, and frequency tracking. This configuration provides the necessary phase reference for implementing rotating coordinate transformations in single-phase systems [
25].
As shown in
Figure 2, the Second-Order Generalized Integrator (SOGI) processes the input signal
through an internal structure of integrators and feedback, generating a quadrature signal
with a 90° phase shift and equal amplitude to the in-phase signal
. The corresponding transfer functions of the SOGI in the
s-domain are given as follows
Here, denotes the angular frequency of the fundamental grid voltage, and is the gain coefficient used to adjust the filtering level and dynamic response characteristics of the system to the input signal.
As shown in
Figure 1, applying Kirchhoff’s voltage law to analyze the voltage across the LC filter results in
By applying Equation (8) separately to the grid-side voltage
and the inductor current
, the expressions for their rotating vectors of voltage and current are obtained as follows
In the above expressions, and represent the peak values of the grid-side voltage and the inductor current of , respectively.
Substituting Equations (10) and (11) into Equation (9) yields
After applying the Park transformation to the d-q rotating reference frame, the following expression is obtained
Let the sampling period be
. By applying the forward Euler method to discretize (13), the MPCC expression can be obtained as follows
Taking the leg current as the control target, the current cost function is defined as follows
Based on the instantaneous power theory, the instantaneous active power
and reactive power
of the single-phase converter in the synchronous rotating d-q reference frame can be expressed as follows
When the d-axis of the synchronous rotating d-q reference frame is aligned with the grid voltage vector
, it follows that
and
. Under this condition, Equations (14) and (16) can be simplified as follows
The differentials of
and
are given by
Through the joint application of Equations (13), (18) and (19), the following expression is obtained
Discretizing Equation (20) using the forward Euler approach yields the mathematical formulation of MPDPC as shown below
Taking the grid-side power as the control objective, the power cost function is defined as follows
3. Model Predictive Control of Active NP Voltage Using the Third Leg
3.1. Operating Modes of the Third Leg
By controlling the switching devices of the third leg to turn on and off, appropriate charging strategies are applied to the upper and lower DC bus capacitors, enabling the balancing of the NP voltage. When the voltage across
is higher, energy is transferred from
to
through the third leg; conversely, when the voltage across
is higher, energy is transferred from
to
via the third leg, causing the voltage of
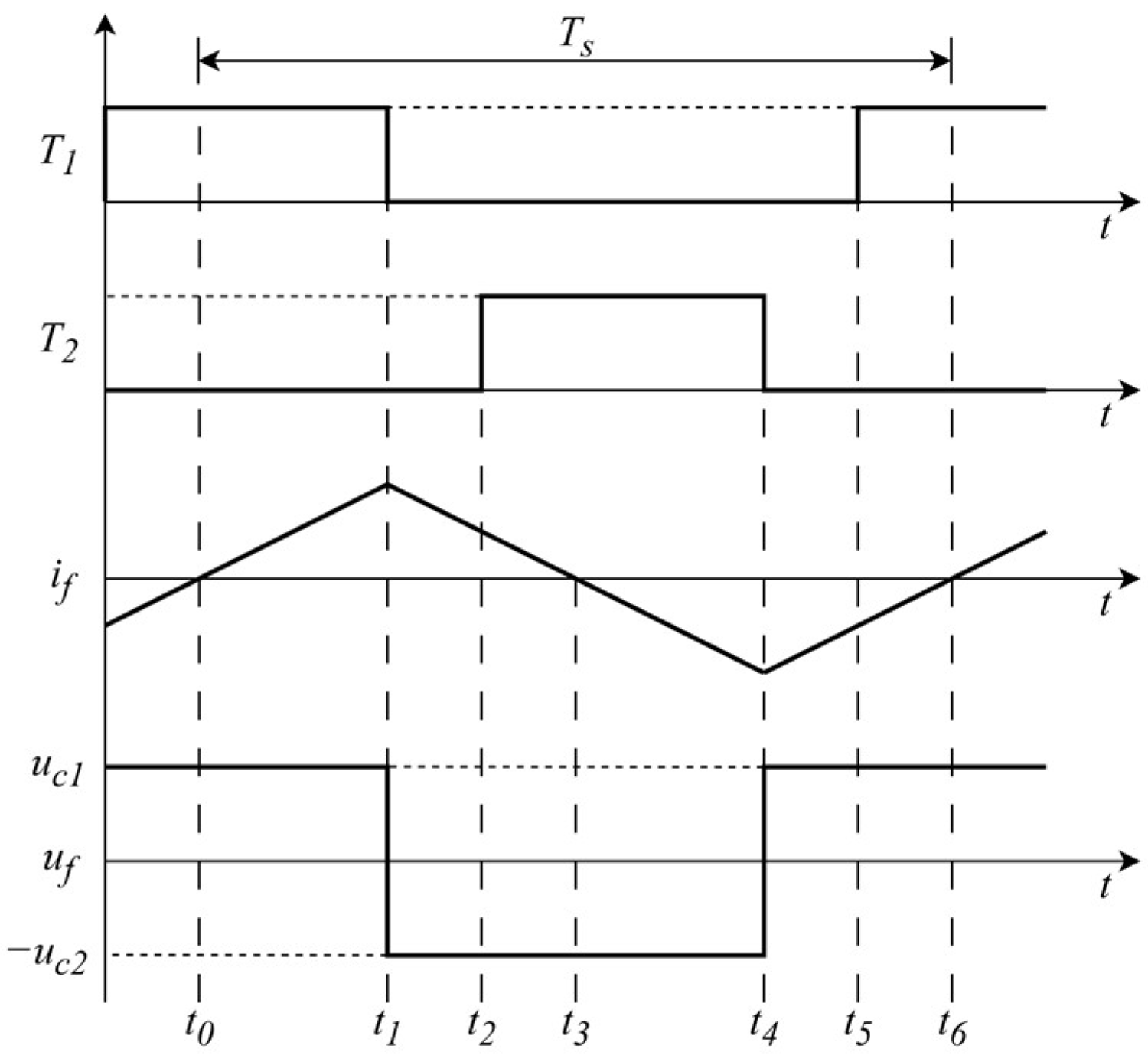
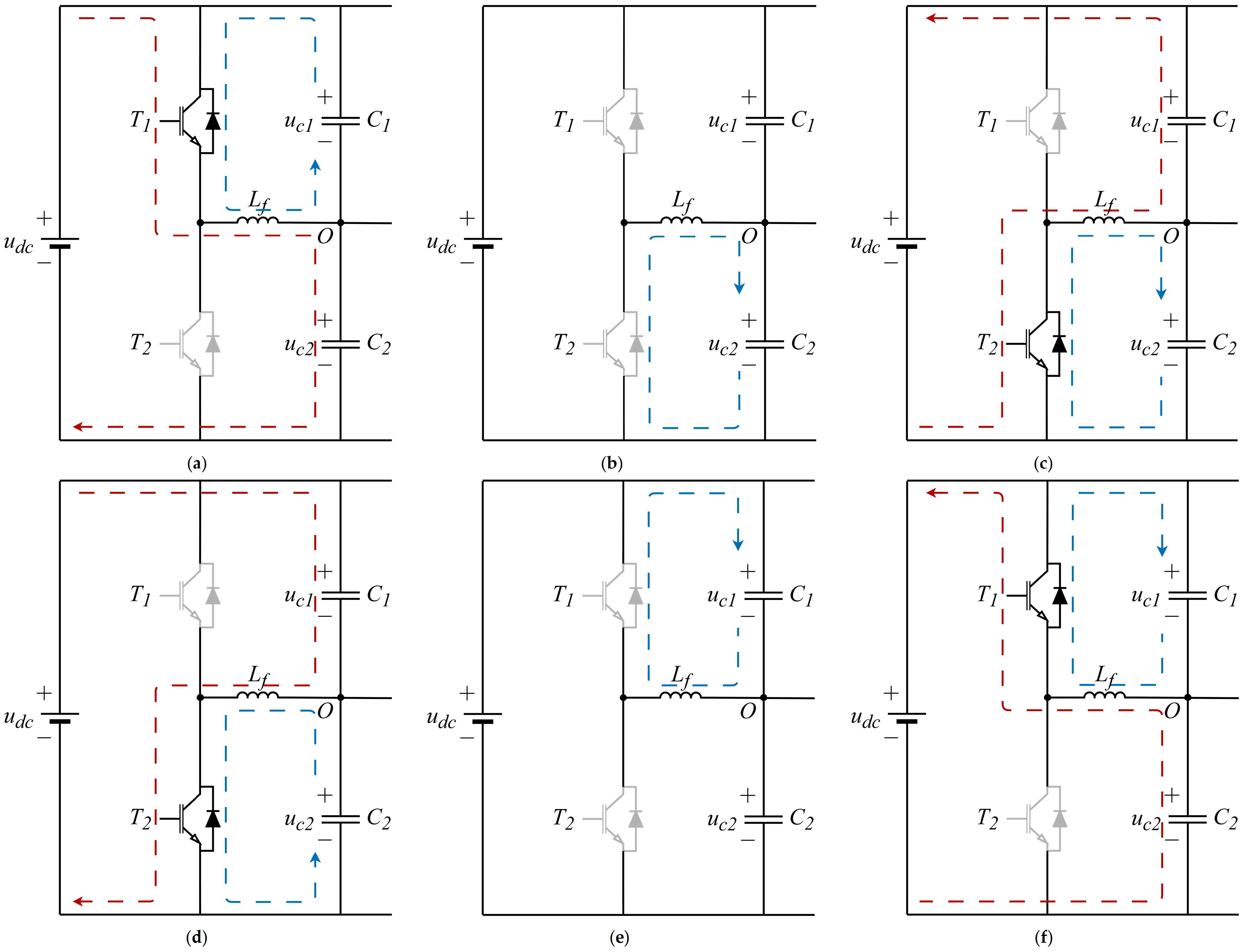
to increase. Based on the switching states and the direction of the inductor current, there are six operating modes, as illustrated in
Figure 3 and
Figure 4.
Mode 1: is turned ON while is turned OFF. This mode corresponds to the interval . The current begins increasing from zero. A closed loop is formed by the DC bus voltage , , , and , allowing the DC source to charge . Meanwhile, , , and form another loop where charges . The voltage across equals , resulting in decreasing and increasing.
Mode 2: Both and are turned OFF during the interval . The current remains positive and flows through a loop formed by , , and . In this state, charges , with the voltage across being opposite to . Voltage increases.
Mode 3: is OFF and is ON in the interval . The current remains positive. A loop is formed by , , , and , where supplies energy to the DC bus. Simultaneously, , , and form another loop that continues to charge . The voltage across is opposite to , leading to a decrease in and an increase in .
Mode 4: During the interval , remains OFF and is ON. The current becomes negative. The loop formed by , , , and allows the DC source to charge . Meanwhile, , , and form a loop where discharges into . The voltage across is opposite to . As a result, increases and decreases.
Mode 5: Both and are OFF during the interval , and remains negative. A loop is formed by , , and , where charges . The voltage across equals , resulting in an increase of .
Mode 6: is ON and is OFF during the interval . The current remains negative. A loop formed by , , , and allows to supply energy to the DC bus. At the same time, , , and form a loop, where continues to charge . The voltage across equals , leading to an increase in and a decrease in .
3.2. Model Predictive Control of NP Voltage
Let the DC bus voltage be denoted as
, and the NP voltage difference as
. Then,
and
can be expressed as follows
The currents of the upper and lower capacitors on the DC bus can be expressed as
The designed circuit employs
. Based on Kirchhoff’s law, the circuit Equation for the third bridge arm is given by
By applying the forward Euler method to discretize Equations (25) and (26), the following expressions can be obtained
Equation (28) provides the required expression for model predictive NP voltage control. From
Figure 3, along with Equations (27) and (28), it can be seen that
is related to both the switching actions and
. The value of
at time step
depends on
at time step
, while the predicted NP voltage difference
at
depends on
at
, and is therefore independent of
at
. This indicates that Equation (27) alone cannot be used to control the NP voltage difference at
through the switching action at
. To resolve this problem, a two-step prediction method is employed. Applying the two-step prediction to Equation (27) yields the following
By substituting Equations (27) and (28) into Equation (29), the following expression is obtained
Taking the capacitor voltage difference as the control objective, the DC bus voltage balancing cost function is defined as follows
The above method provides a theoretical basis for controlling a single-phase three-level three-leg converter. However, in practice, MPC algorithms inherently suffer from delay issues. At the beginning of each sampling period, the processes of voltage and current sampling, reference acquisition, and the computational burden of the MPC algorithm consume significant processing time on the digital controller. This results in action delay, causing the predicted values to deviate from the reference values and degrading overall system performance. Therefore, delay compensation must be considered in the control algorithm. To mitigate this issue, this paper adopts a two-step prediction method to compensate for the delay-induced errors. The specific steps are as follows:
(1) Sample the controlled variables at time step .
(2) Use the mathematical model to calculate the estimated values of , , , , , , , and at time step .
(3) Based on these estimates and the predictive model, calculate the predicted values of each voltage vector at time step
, namely
Since the NP voltage difference at time step
cannot be controlled directly by the switching actions at
, it is necessary to predict the estimated value of
at
At this point, the expressions of the cost functions are given by
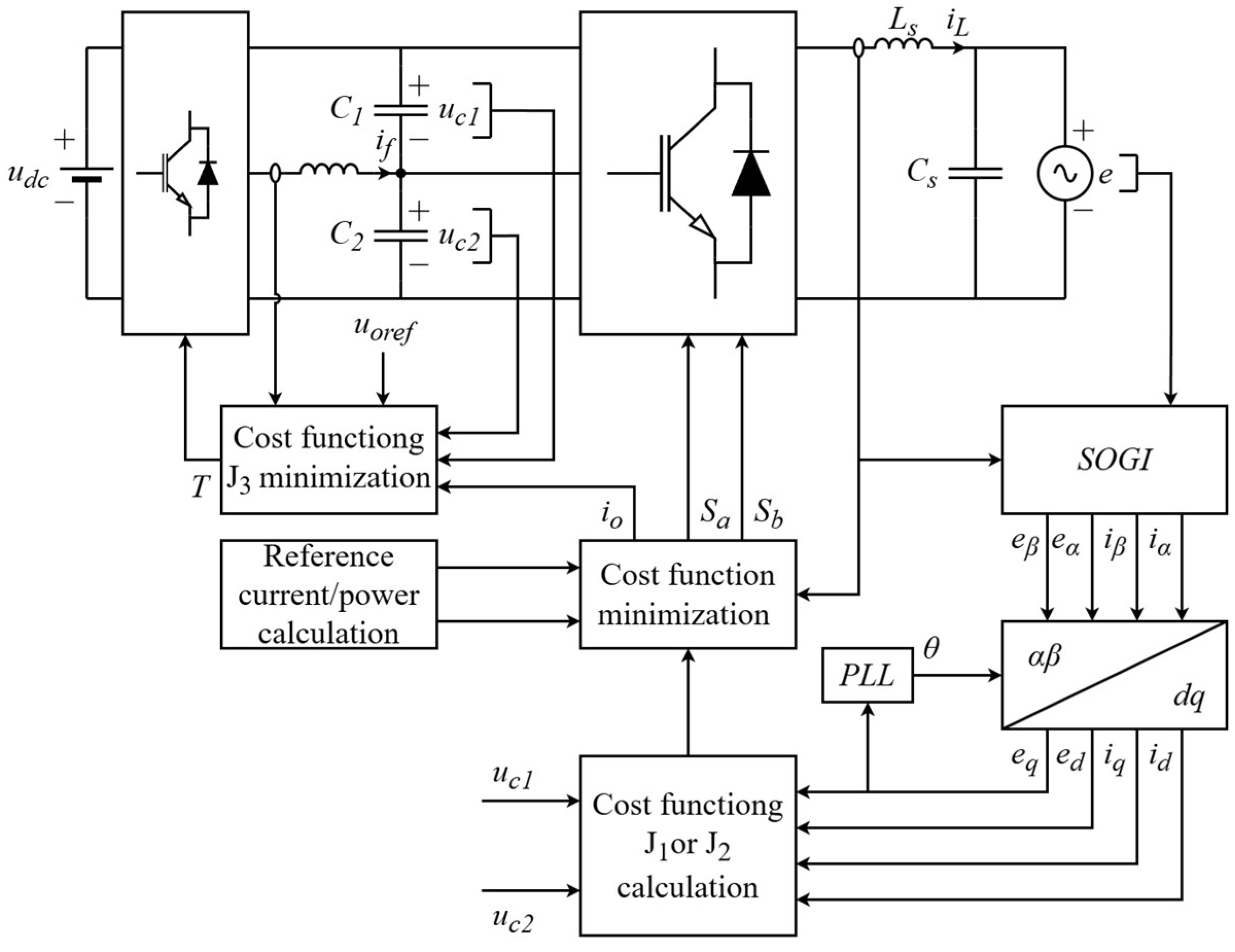
(4) Store the optimal predicted values, switching states, and , which will serve as input data for the next sampling period.
The configuration of the proposed predictive control strategy is shown in
Figure 5.
5. Conclusions
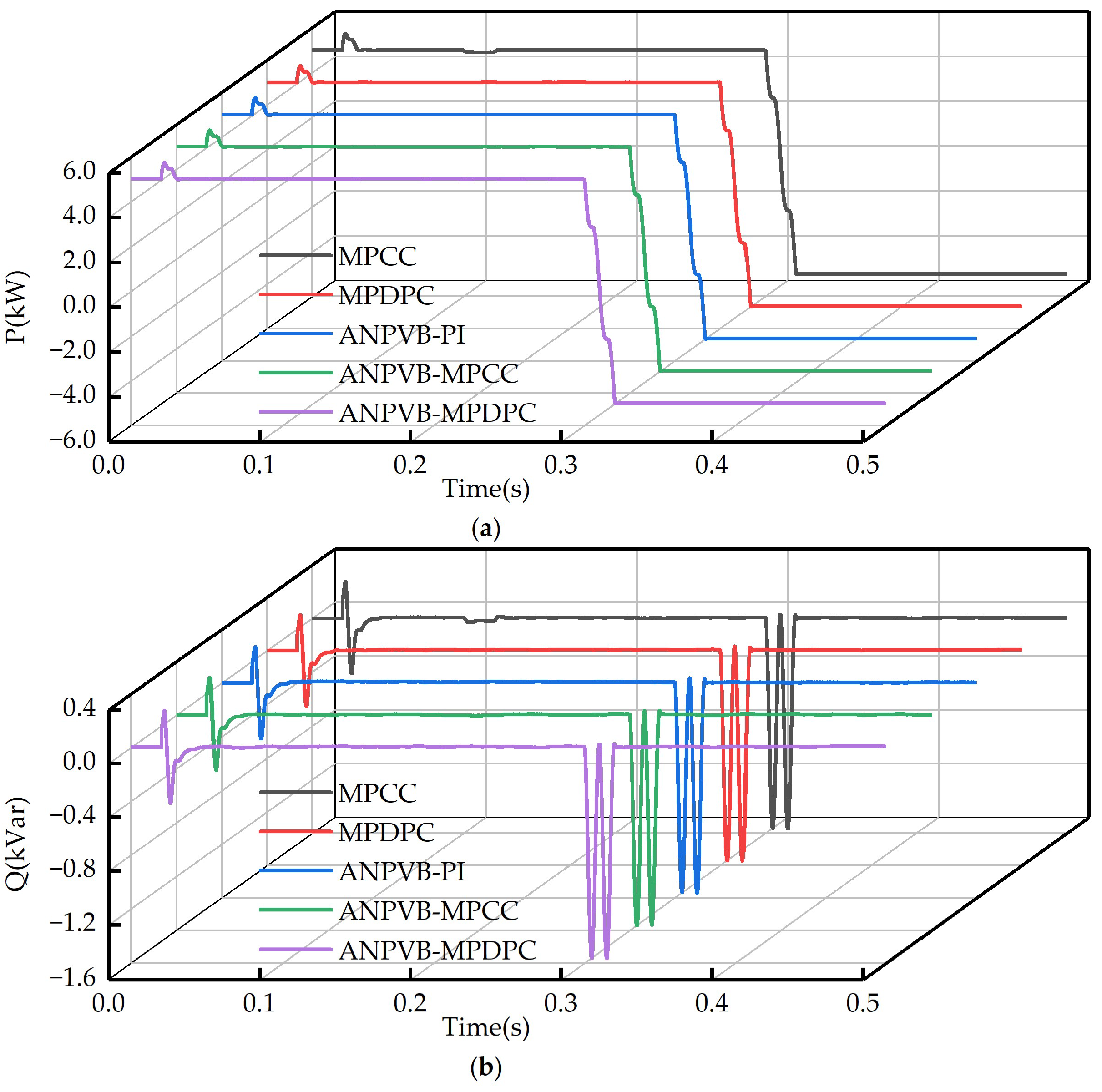
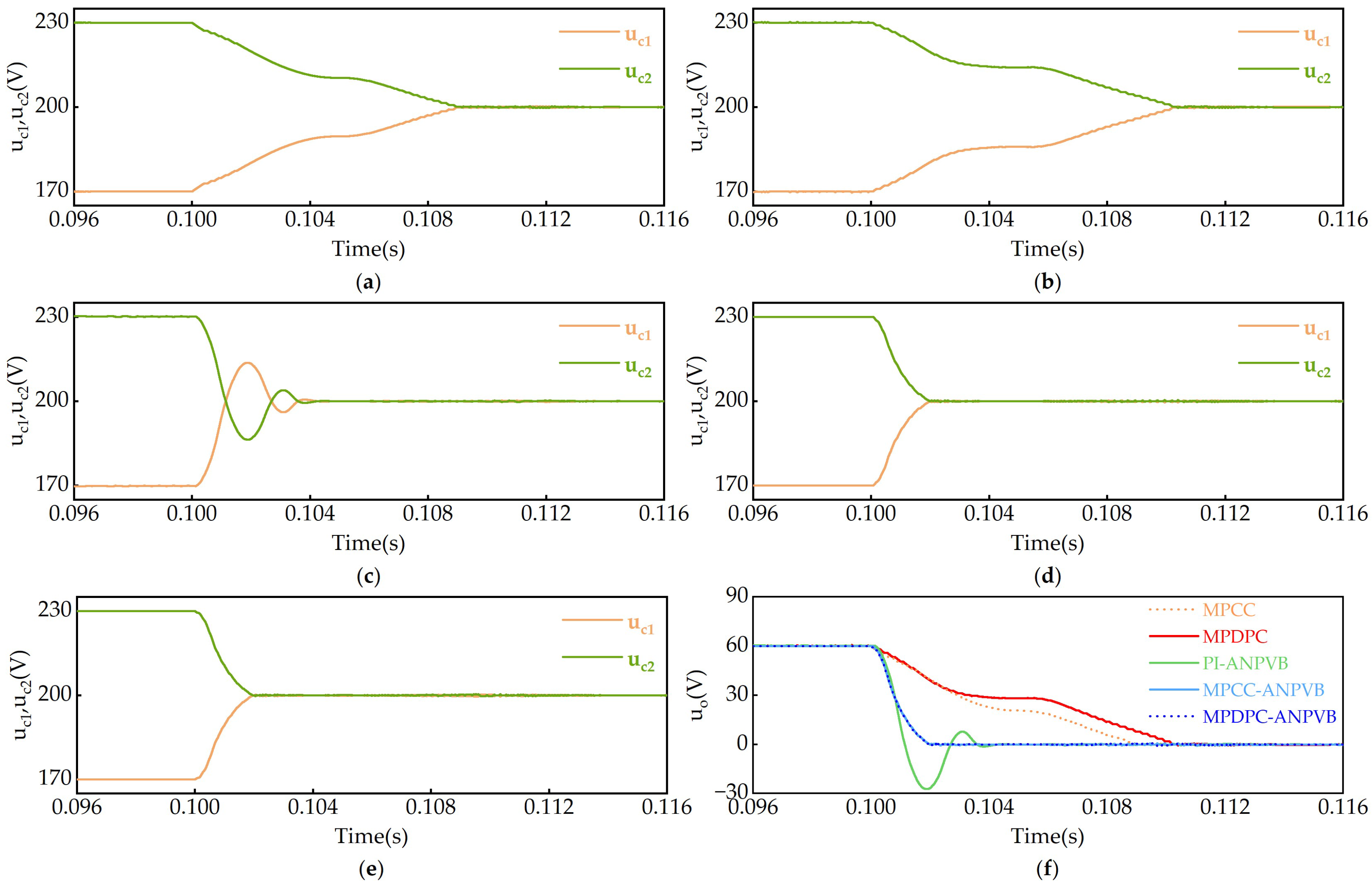
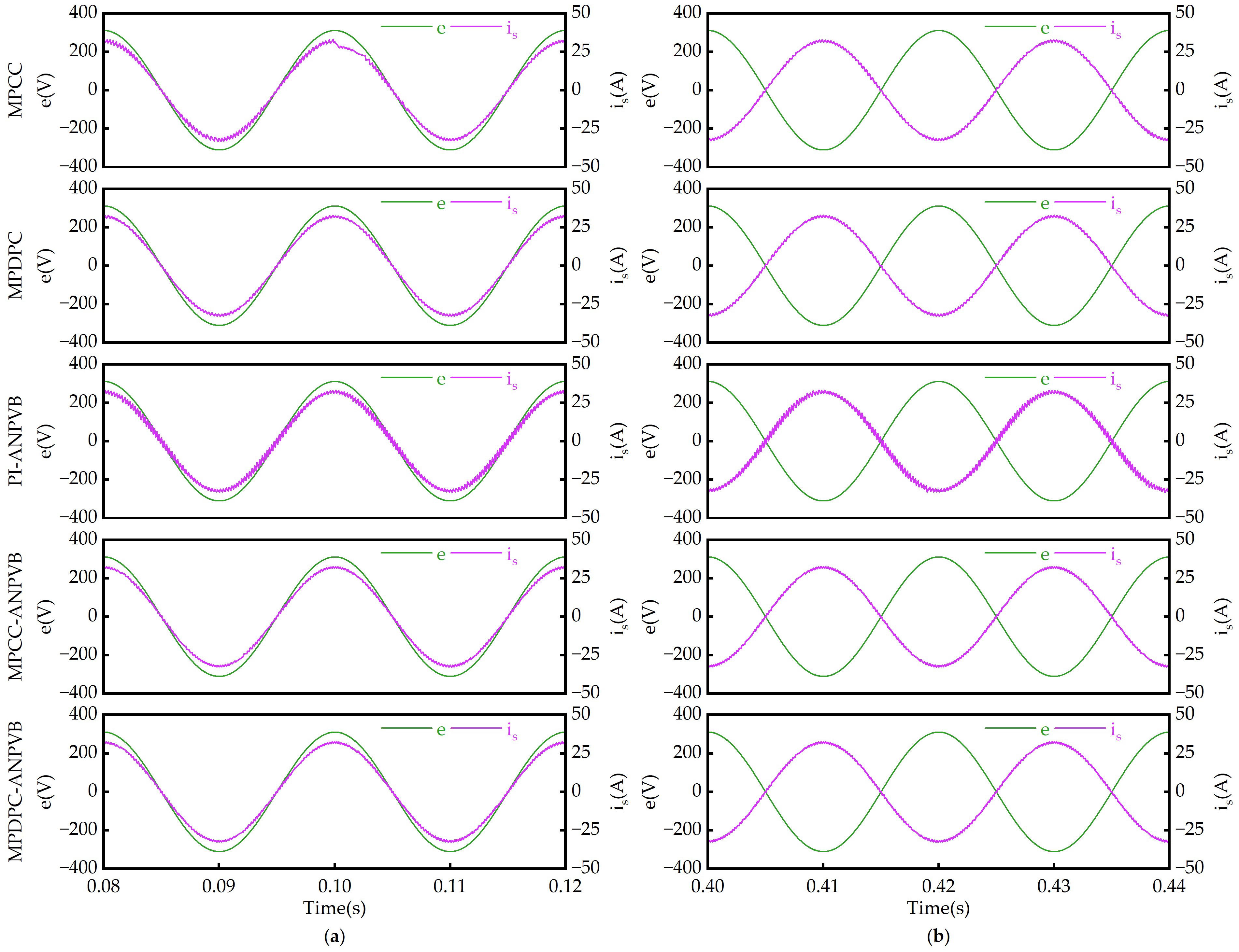
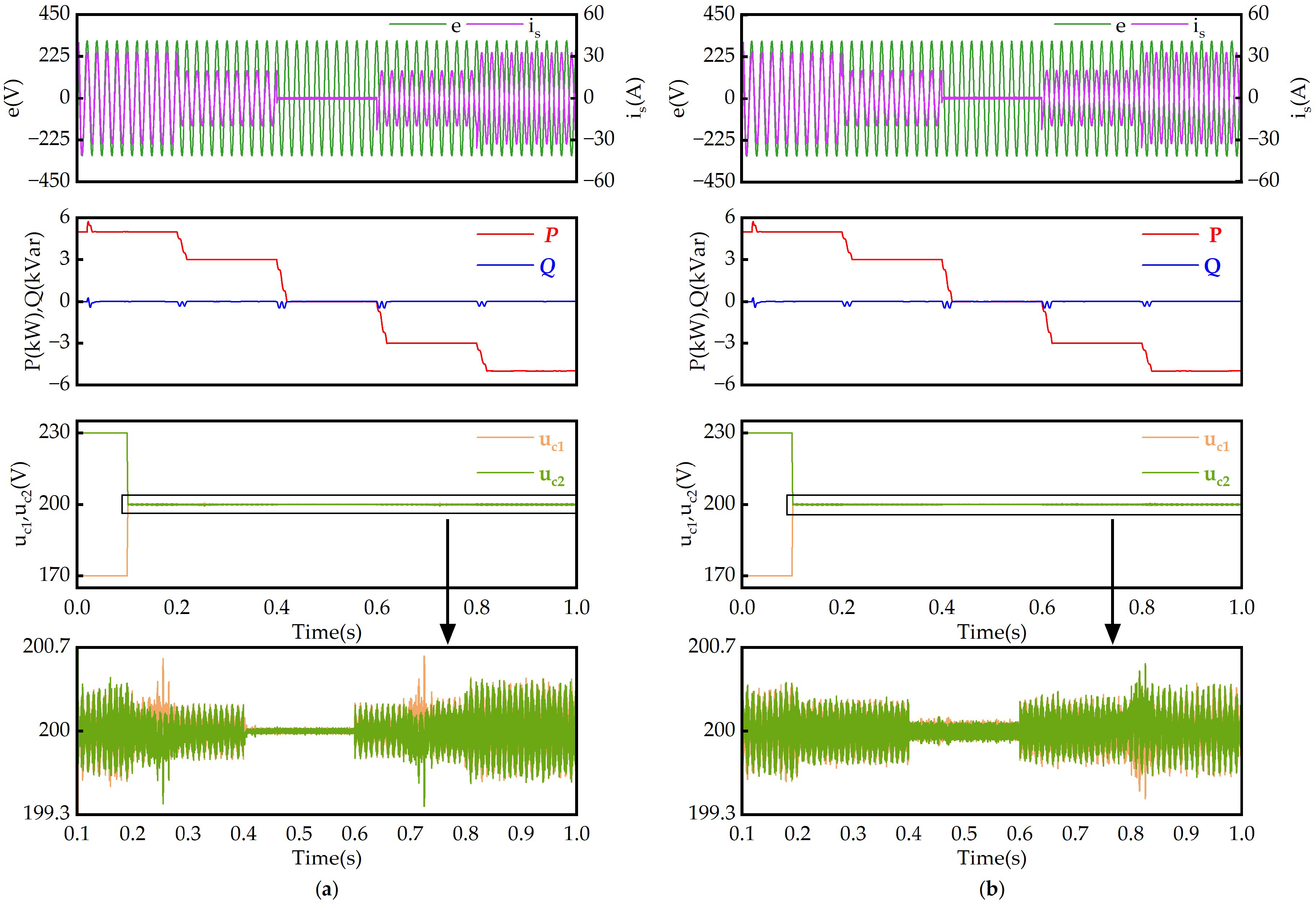
This paper proposed an improved model predictive control strategy integrating the hardware-based ANPVB for single-phase three-level converters in on-board V2G applications. Two approaches, MPCC-ANPVB and MPDPC-ANPVB, were developed and evaluated. The proposed methods effectively mitigate NP voltage imbalance without relying on weighting factor tuning. By directly adjusting the NP voltage via hardware, the control system is simplified, enhancing robustness and feasibility. Compared with conventional MPC and other existing methods reported in the literature, the improved strategies demonstrate faster and more stable balancing performance, maintaining better voltage symmetry across the DC-link capacitors under dynamic operating conditions. Simulation results under two key scenarios, bidirectional mode switching and active power step changes, show that MPCC-ANPVB and MPDPC-ANPVB maintain smoother current waveforms, lower current harmonic distortion, and accurate power tracking. Even during continuous step changes in active power reference, the NP voltage remains well balanced without significant deviation. In conclusion, the proposed control schemes enhance NP voltage regulation while ensuring high power quality and dynamic performance. These features make them suitable for practical V2G converter control applications. While the proposed control strategies have been validated through detailed simulation studies, practical implementation may encounter additional challenges such as measurement noise, parameter variation, and digital control delay. Therefore, future work will focus on building a hardware prototype platform to experimentally verify their effectiveness and robustness under realistic operating conditions.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}