
eVTOL Dispatch Cost Optimization Under Time-Varying Low-Altitude Delivery Demand


Abstract
1. Introduction
2. Related Works
3. Model and Analysis
3.1. Premises
3.2. Model and Algorithm
| Algorithm 1: Incremental decision-making algorithm for eVTOL equipment. | |
| 1: | Input: |
| 2: | Delivery demand sequence: d |
| 3: | Operations Center Processing Costs: CK |
| 4: | Unit opportunity cost: CH |
| 5: | Output: |
| 6: | Optimal (minimum) cost |
| 7: | Procedure: |
| 8: | Initiate ; subproblem v |
| 9: | Dynamic programming: |
| 10: | For each : |
| 11: | Determine subproblem sets |
| 12: | For each subproblem v: |
| 13: | Calculate subproblem optimal cost: |
| 14: | Select optimal subproblem |
| 15: | Update |
| 16: | Determine Optimal (minimum) cost |
| 17: | End Procedure |
3.3. Numerical Case
- Lower processing cost (CK = 10) and unit opportunity cost (δCK = 1) scenarios.
- If the eVTOL incremental decision sequence is [37, 0, 26, 27].
- 2.
- If eVTOL incremental decision sequence is [37, 0, 53, 0]
- Scenarios with higher processing costs (CK = 200) and unit opportunity costs (δCH = 5)
- If the eVTOL incremental decision sequence is [35, 0, 25, 25]
- 2.
- If the eVTOL incremental decision sequence is [37, 0, 53, 0]
3.4. Simulation
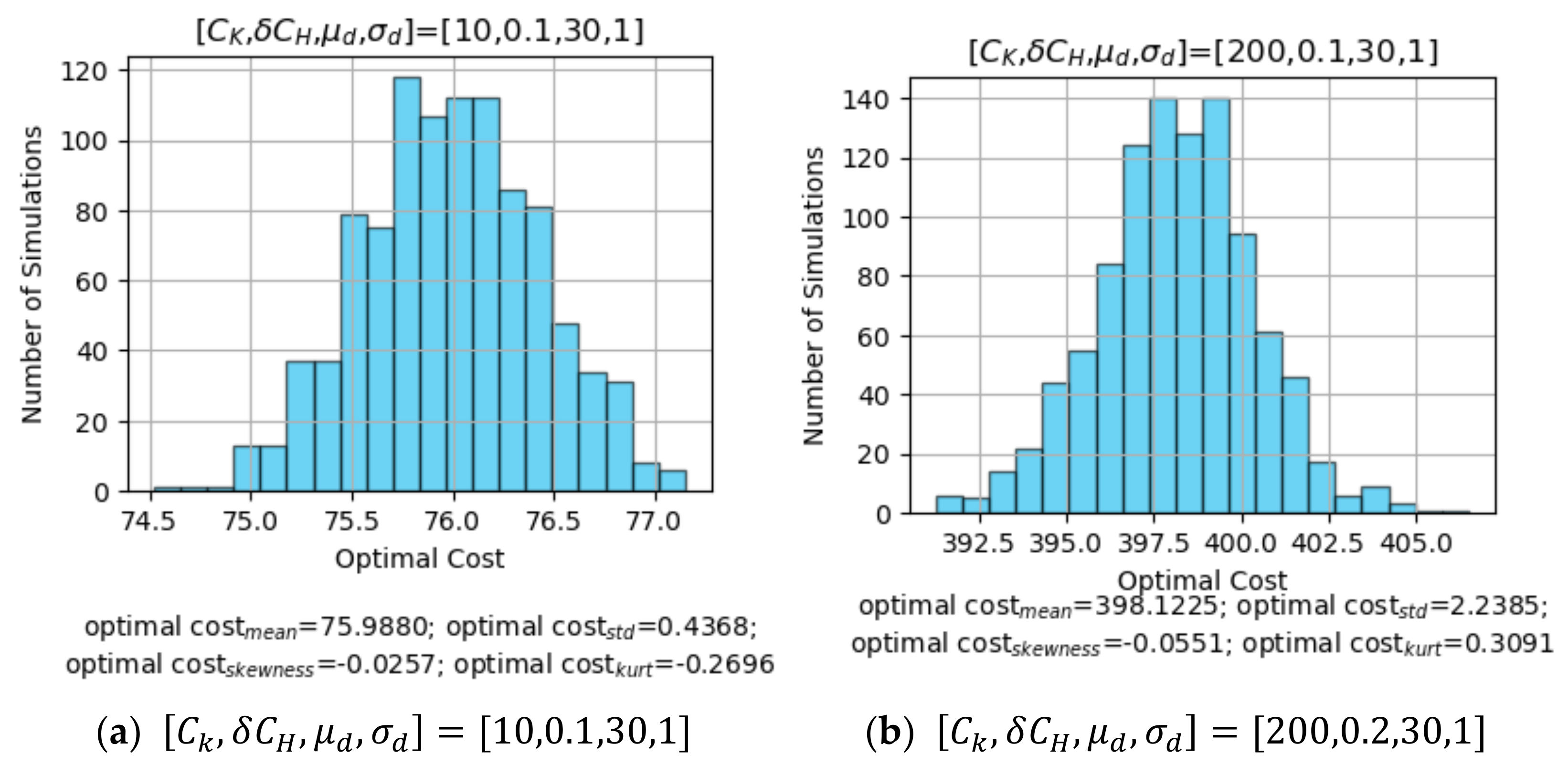
- An increase in processing cost raises the average level of optimal cost. The variation in the peak of the distribution of the optimal cost in the position of the horizontal axis is provided by a group comparison of the results in Figure 3a–h, fixing the other parameters, with the processing cost categorized into two states of either a low CK = 10 or a high CK = 200, and the variation in the peak of the distribution of optimal cost in the position of the horizontal axis.
- The increase in unit opportunity cost concentrates the distribution of the optimal cost. By comparing (a) and (c), (b) and (d), (e) and (g), and (f) and (h), respectively, and fixing the other parameters, the unit opportunity cost is categorized into two states, low or high , and the concentration of the distribution of the optimal cost (std) exhibits changes.
- Changes in the mean level of delivery demand and its concentration leads to changes in the mean and skewness of the optimal cost. By comparing (a) and (e), (b) and (f), (c) and (g), and (d) and (h) in groups, fixing the other parameters, the mean of optimal cost increases when the mean and the standard deviation of delivery demand increase simultaneously, and its distribution exhibits a negative skewness with a long tail on the left and a concentration on the right.
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, T.; Du, Y.; Zhang, Z. Low-altitude Emergency Strategy Using Ad-hoc Radio Relay eVTOLs in Karst Topography and Game Analysis. Comput. Fraud. Secur. 2025, 73–83. [Google Scholar] [CrossRef]
- Pavel, M.D. Understanding the control characteristics of electric vertical take-off and landing (eVTOL) aircraft for urban air mobility. Aerosp. Sci. Technol. 2022, 125, 107143. [Google Scholar]
- Hou, X.; Guan, Y.; Han, T.; Wang, C. Towards real-time embodied AI agent: A bionic visual encoding framework for mobile robotics. Int. J. Intell. Robot. 2024, 8, 1038–1056. [Google Scholar]
- Moradi, N.; Wang, C.; Mafakheri, F. Urban Air Mobility for Last-Mile Transportation: A Review. Vehicles 2024, 6, 1383–1414. [Google Scholar] [CrossRef]
- Zheng, C.; Yan, Y.; Liu, Y. Prospects of eVTOL and Modular Flying Cars in China Urban Settings. J. Intell. Connect. Veh. 2023, 6, 187–189. [Google Scholar]
- Zaid, A.A.; Belmekki, B.E.Y.; Alouini, M. eVTOL Communications and Networking in UAM: Requirements, Key Enablers, and Challenges. IEEE Commun. Mag. 2023, 61, 154–160. [Google Scholar]
- Farazi, N.P.; Zou, B. Planning electric vertical takeoff and landing aircraft (eVTOL)-based package delivery with community noise impact considerations. Transp. Res. Part. E Logist. Transp. Rev. 2024, 189, 103661. [Google Scholar]
- Hamid, M.; Nasiri, M.M.; Rabbani, M. A mixed closed-open multi-depot routing and scheduling problem for homemade meal delivery incorporating drone and crowd-sourced fleet: A self-adaptive hyper-heuristic approach. Eng. Appl. Artif. Intel. 2023, 120, 105876. [Google Scholar]
- Heimsch, D.; Söpper, M.; Speckmaier, M.; Mbikayi, Z.; Kellringer, S.; Holzapfel, F. Development and Implementation of a Safety Gateway for a Medical Evacuation eVTOL Aircraft. In AIAA Aviation Forum and ASCEND Co-Located Conference Proceedings; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2024. [Google Scholar]
- Bakirci, M.; Ozer, M.M. Surveillance, Reconnaissance and Detection Services for Disaster Operations of IoT-Based eVTOL UAVs with Swarm Intelligence. In Proceedings of the 2023 11th International Symposium on Digital Forensics and Security (ISDFS), Chattanooga, TN, USA, 11–12 May 2023; pp. 1–6. [Google Scholar]
- Szilágyi, D.; Sziroczák, D. Operating eVTOLs in the Emergency Response Service. In Novel Techniques in Maintenance, Repair, and Overhaul; Springer: Berlin/Heidelberg, Germany, 2024; pp. 403–409. [Google Scholar]
- Hall, A.R.; Coyne, C.J. The political economy of drones. Def. Peace Econ. 2014, 25, 445–460. [Google Scholar]
- Xu, C.; Liao, X.; Tan, J.; Ye, H.; Lu, H. Recent Research Progress of Unmanned Aerial Vehicle Regulation Policies and Technologies in Urban Low Altitude. IEEE Access 2020, 8, 74175–74194. [Google Scholar]
- Al-Rubaye, S.; Tsourdos, A.; Namuduri, K. Advanced Air Mobility Operation and Infrastructure for Sustainable Connected eVTOL Vehicle. Drones 2023, 7, 319. [Google Scholar] [CrossRef]
- Xiang, S.; Xie, A.; Ye, M.; Yan, X.; Han, X.; Niu, H.; Li, Q.; Huang, H. Autonomous eVTOL: A summary of researches and challenges. Green. Energy Intell. Transp. 2024, 3, 100140. [Google Scholar]
- Doppler, C.; Holzapfel, F.; Scharrer, M.K.; Lorscheider, T.; Prochart, G. Requirements and design of powertrains for eVTOLs. e+i Elektrotech. Informationstech. 2024, 141, 188–204. [Google Scholar]
- Franciscone, B.G.; Fernandes, E. Challenges to the Operational Safety and Security of eVTOL Aircraft in Metropolitan Regions: A Literature Review. J. Airl. Oper. Aviat. Manag. 2023, 2, 45–56. [Google Scholar]
- Shao, Q.; Shao, M.; Lu, Y. Terminal area control rules and eVTOL adaptive scheduling model for multi-vertiport system in urban air Mobility. Transp. Res. Part C Emerg. Technol. 2021, 132, 103385. [Google Scholar]
- Nygaard, T.F.; Martin, C.P.; Torresen, J.; Glette, K.; Howard, D. Real-world embodied AI through a morphologically adaptive quadruped robot. Nat. Mach. Intell. 2021, 3, 410–419. [Google Scholar]
- Gupta, A.; Savarese, S.; Ganguli, S.; Fei-Fei, L. Embodied intelligence via learning and evolution. Nat. Commun. 2021, 12, 5721. [Google Scholar]
- Yun, H.; Soyyigit, A.; Weng, Q.; Keshmiri, S.S.; Prabhakar, P.; Brown, N. Anytime Perception and Control for Safe and Intelligent Urban Air Mobility. In Proceedings of the AIAA SCITECH 2024 Forum, Orlando, FL, USA, 8–12 January 2024. [Google Scholar]
- Chen, J.; Lu, S. An advanced driving agent with the multimodal large language model for autonomous vehicles. In Proceedings of the 2024 IEEE International Conference on Mobility, Operations, Services and Technologies (MOST), Dallas, TX, USA, 1–3 May 2024; pp. 1–11. [Google Scholar]
- Liu, S.; Wang, J.; Wang, R.; Zhang, Y.; Song, Y.; Xing, L. Data-driven dynamic pricing and inventory management of an omni-channel retailer in an uncertain demand environment. Expert. Syst. Appl. 2024, 244, 122948. [Google Scholar]
- Diz, C.; Casas-Cortés, M. On delivery waiting: The entanglement of gig and border temporalities in platform cities. Environ. Plan. D Soc. Space 2024, 218514815. [Google Scholar] [CrossRef]
- Zou, B.; Wu, S.; Gong, Y.; Yuan, Z.; Shi, Y. Delivery network design of a locker-drone delivery system. Int. J. Prod. Res. 2024, 62, 4097–4121. [Google Scholar]
- Zhang, Y.; Wang, L. A Dynamic Scheduling Method for Logistics Supply Chain Based on Adaptive Ant Colony Algorithm. Int. J. Comput. Int. Sys 2024, 17, 198. [Google Scholar]
- Alqahtani, H.; Kumar, G. Efficient Routing Strategies for Electric and Flying Vehicles: A Comprehensive Hybrid Metaheuristic Review. IEEE T Intell. Vehicl 2024, 1–49, early access. [CrossRef]
- Wei, H.; Lou, B.; Zhang, Z.; Liang, B.; Wang, F.; Lv, C. Autonomous navigation for eVTOL: Review and future perspectives. IEEE T Intell. Vehicl 2024, 9, 4145–4171. [Google Scholar]
- Wild, G. Urban Aviation: The Future Aerospace Transportation System for Intercity and Intracity Mobility. Urban. Sci. 2024, 8, 218. [Google Scholar]
- Peng, Y.; Zhu, W.; Yu, D.Z.; Liu, S.; Zhang, Y. Multi-Depot Electric Vehicle–Drone Collaborative-Delivery Routing Optimization with Time-Varying Vehicle Travel Time. Vehicles 2024, 6, 1812–1842. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tech | Description |
|---|---|
| Config | Six-axis small multi-rotor vertical takeoff and landing |
| MPL 1 | 2.5 kg |
| MTOW 2 | 9.5 kg |
| MRR- MPL 3 | 5 km |
| MDD- MPL 4 | 10 km |
| Cruising | 83 km/h |
| Battery | 12S Li-ion (NMC 5), 45 V, 4400 mAh × 2, 198 Wh × 2, 2C charge, 6C discharge |
| Avionics | CPU × 2, 5G/4G/Wi-Fi, Dual Flight Control |
| Perceptron | SVC 6 × 3, HDMC 7 × 2, UHDMC 8 × 2, 4 DmmWR 9 × 2, |
| Design | Noise Reduced by 50%; Folded Size Reduced by 49% |
| Safety | CSSR 10 & SP 11 |
| Flow No. | Time Node | Process | Action | ||
|---|---|---|---|---|---|
| Restaurant | eVTOL | Consumer | |||
| 1 | T − 6 | Place order | × | ||
| 2 | T − 5 | Pay order | × | ||
| 3 | T − 4 | Prepare order | × | ||
| 4 | T − 3 | Prepare eVTOL | × | ||
| 5 | T − 2 | Meal out | × | ||
| 6 | T − 1 | Pickup meal | × | ||
| 7 | T | Start delivery | × | ||
| 8 | T + 1 | Landing | × | ||
| 9 | T + 2 | Return flight | × | ||
| 10 | T + 3 | Accept delivery | × | ||
| The eVTOL incremental decision sequence is [37, 0, 25, 28] | |||||
| Decision Time: T | t = 1 | t = 2 | t = 3 | t = 4 | Sum |
| Delivery demand | 11 | 26 | 21 | 32 | 90 |
| Incremental decision | 37 | 0 | 26 | 27 | 90 |
| eVTOL inventory before decision | 0 | 26 | 0 | 5 | n/a |
| eVTOL inventory after delivery | 26 | 0 | 5 | 0 | n/a |
| Processing cost CK | 10 | 0 | 10 | 10 | 30 |
| Rental cost CL | 37 | 0 | 26 | 27 | 90 |
| Opportunity cost CH | 26 | 0 | 5 | 0 | 31 |
| Total Costs | 73 | 0 | 41 | 37 | 151 |
| The eVTOL incremental decision sequence is [37, 0, 53, 0] | |||||
| Decision Time: T | t = 1 | t = 2 | t = 3 | t = 4 | Sum |
| Delivery demand | 11 | 26 | 21 | 32 | 90 |
| Incremental decision | 37 | 0 | 53 | 0 | 90 |
| eVTOL inventory before decision | 0 | 26 | 0 | 32 | n/a |
| eVTOL inventory after delivery | 26 | 0 | 32 | 0 | n/a |
| Processing cost CK | 10 | 0 | 10 | 0 | 20 |
| Rental cost CL | 37 | 0 | 53 | 0 | 90 |
| Opportunity cost CH | 26 | 0 | 32 | 0 | 58 |
| Total Costs | 73 | 0 | 95 | 0 | 168 |
| The eVTOL incremental decision sequence is [37, 0, 25, 28] | |||||
| Decision Time: T | t = 1 | t = 2 | t = 3 | t = 4 | Sum |
| Delivery demand | 11 | 26 | 21 | 32 | 90 |
| Incremental decision | 37 | 0 | 26 | 27 | 90 |
| eVTOL inventory before decision | 0 | 26 | 0 | 5 | n/a |
| eVTOL inventory after delivery | 26 | 0 | 5 | 0 | n/a |
| Processing cost CK | 200 | 0 | 200 | 200 | 600 |
| Rental cost CL | 37 | 0 | 26 | 27 | 90 |
| Opportunity cost CH | 130 | 0 | 25 | 0 | 155 |
| Total Costs | 367 | 0 | 251 | 227 | 845 |
| The eVTOL incremental decision sequence is [37, 0, 53, 0] | |||||
| Decision Time: T | t = 1 | t = 2 | t = 3 | t = 4 | Sum |
| Delivery demand | 11 | 26 | 21 | 32 | 90 |
| Incremental decision | 37 | 0 | 53 | 0 | 90 |
| eVTOL inventory before decision | 0 | 26 | 0 | 32 | n/a |
| eVTOL inventory after delivery | 26 | 0 | 32 | 0 | n/a |
| Processing cost CK | 200 | 0 | 200 | 0 | 400 |
| Rental cost CL | 37 | 0 | 53 | 0 | 90 |
| Opportunity cost CH | 130 | 0 | 160 | 0 | 290 |
| Total Costs | 367 | 0 | 413 | 0 | 780 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Published by MDPI on behalf of the World Electric Vehicle Association. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, T.; Du, Y.; Zhang, Z.; Wang, Y. eVTOL Dispatch Cost Optimization Under Time-Varying Low-Altitude Delivery Demand. World Electr. Veh. J. 2025, 16, 220. https://doi.org/10.3390/wevj16040220
Li T, Du Y, Zhang Z, Wang Y. eVTOL Dispatch Cost Optimization Under Time-Varying Low-Altitude Delivery Demand. World Electric Vehicle Journal. 2025; 16(4):220. https://doi.org/10.3390/wevj16040220
Chicago/Turabian StyleLi, Tao, Yingjun Du, Zemin Zhang, and Yushun Wang. 2025. "eVTOL Dispatch Cost Optimization Under Time-Varying Low-Altitude Delivery Demand" World Electric Vehicle Journal 16, no. 4: 220. https://doi.org/10.3390/wevj16040220
APA StyleLi, T., Du, Y., Zhang, Z., & Wang, Y. (2025). eVTOL Dispatch Cost Optimization Under Time-Varying Low-Altitude Delivery Demand. World Electric Vehicle Journal, 16(4), 220. https://doi.org/10.3390/wevj16040220