
Correlation Method of Assistance Driving Function and Road Environment Factors in Investigation of Intelligent Vehicle Traffic Accident

Abstract
1. Introduction
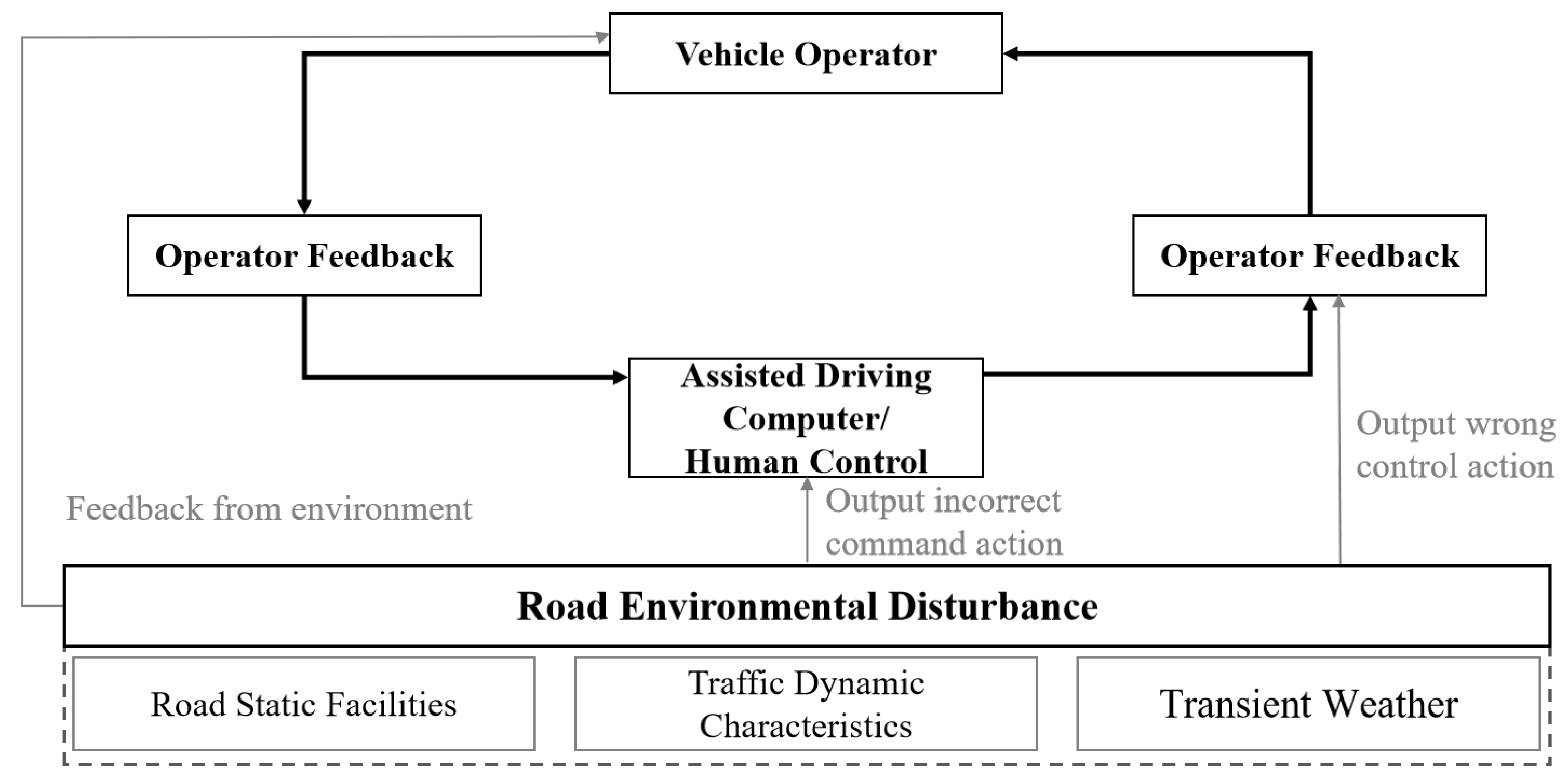
2. STPA Analysis of Traffic Accidents of Assisted Driving Vehicles
3. Analysis of Road Environment Interference Factors
3.1. Content of Road Static Facilities Survey
3.2. Traffic Dynamic Characteristics Investigation Content
3.3. Investigation of Transient Weather Conditions
3.4. Road Environment Interference Model
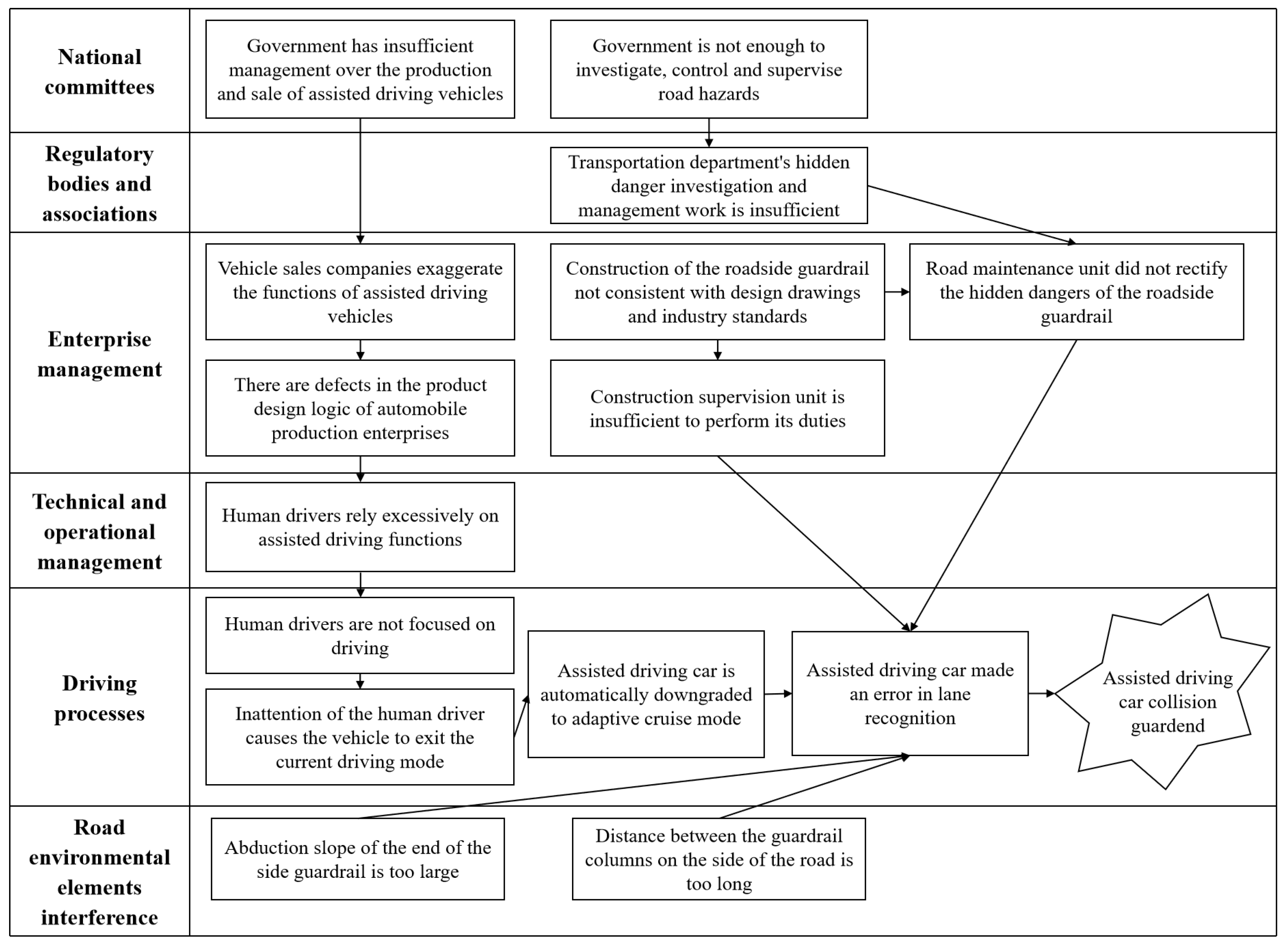
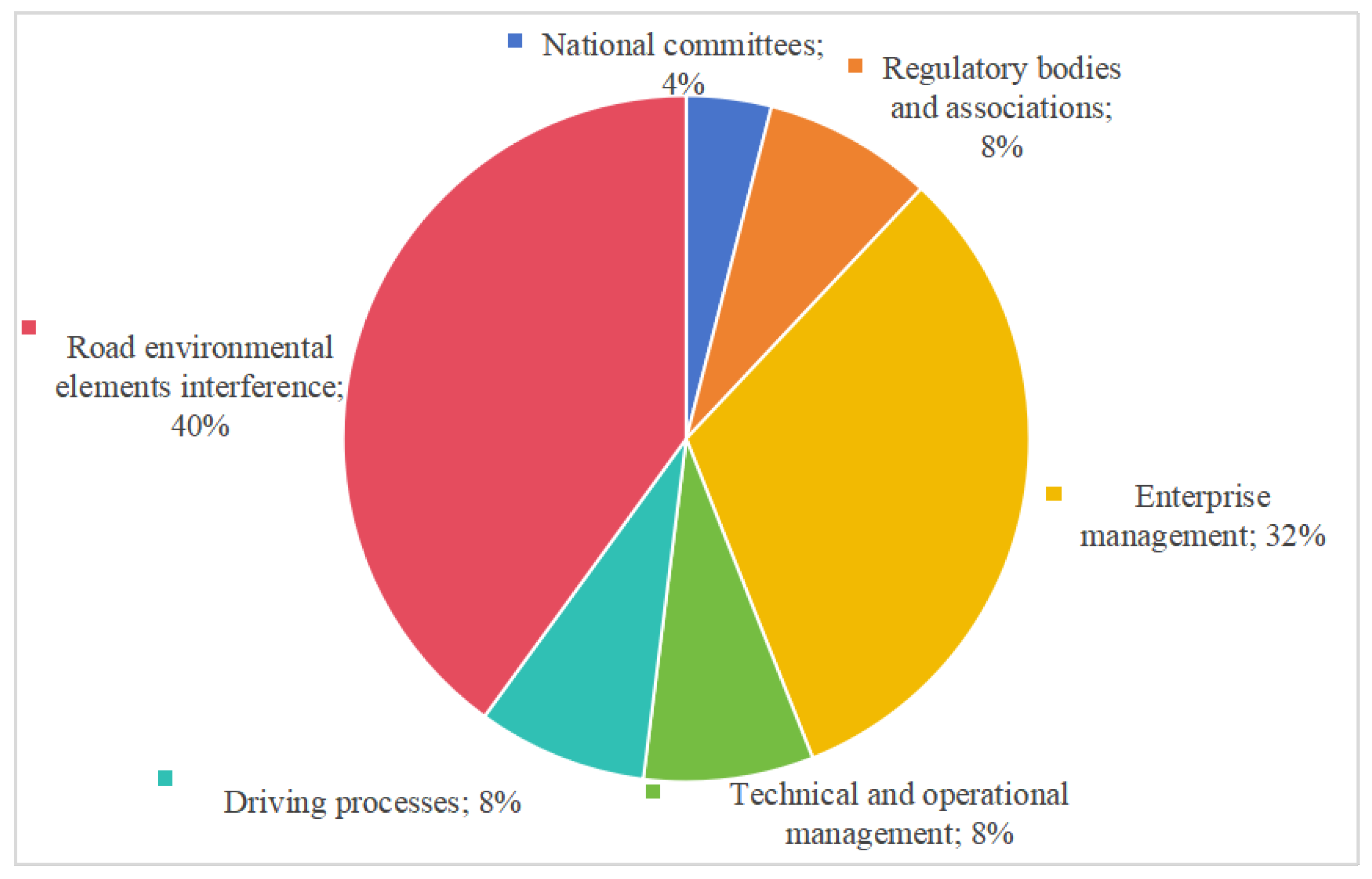
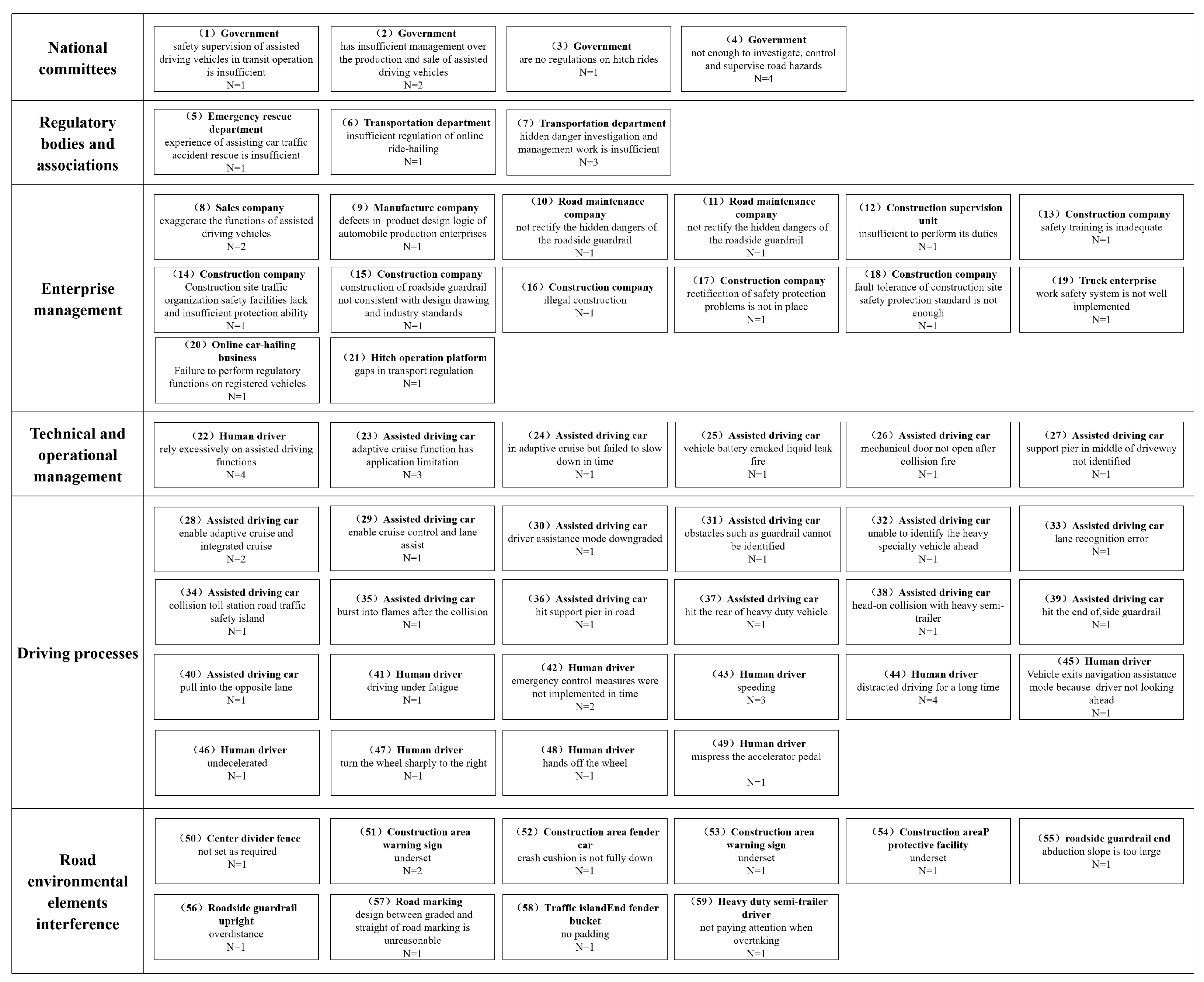
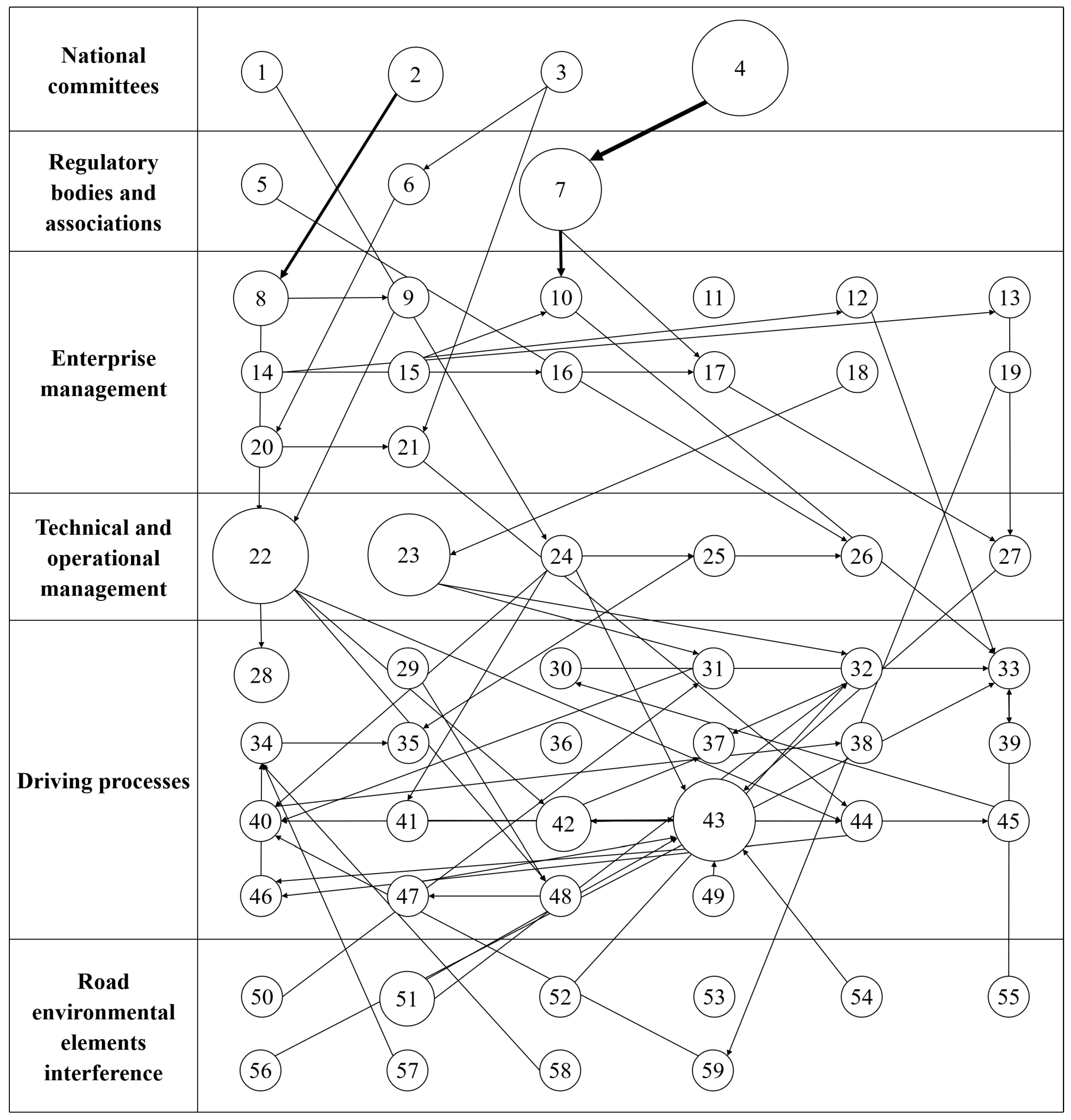
4. Accimap Causation Analysis
5. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bhuiyan, H.; Governatori, G.; Bond, A.; Rakotonirainy, A. Traffic rules compliance checking of automated vehicle maneuvers. Artif. Intell. Law 2024, 32, 1–56. [Google Scholar] [CrossRef]
- Leveson, N.G. Applying systems thinking to analyze and learn from events. Saf. Sci. 2011, 49, 55–64. [Google Scholar] [CrossRef]
- García, A.; Camacho-Torregrosa, F.J.; Baez, P.V.P. Examining the effect of road horizontal alignment on the speed of semi-automated vehicles. Accid. Anal. Prev. 2020, 146, 105732. [Google Scholar] [CrossRef] [PubMed]
- Moradloo, N.; Mahdinia, I.; Khattak, A.J. Safety in higher level automated vehicles: Investigating edge cases in crashes of vehicles equipped with automated driving systems. Accid. Anal. Prev. 2024, 203, 107607. [Google Scholar] [CrossRef] [PubMed]
- Guo, Y.; Liu, P.; Yuan, Q. Review on research of rond traffic safety of connected and automated vehicles. J. Traffic Transp. Eng. 2023, 23, 19–38. [Google Scholar]
- Xue-song, W.; Ding-ming, Q.; Xin-chen, Y.; Jun-yu, H.; Qian, L. Recent Developments on Road Readiness for Automated Driving. China J. Highw. Transp. 2024, 37, 175–193. [Google Scholar] [CrossRef]
- Jiqing, C.; Xiaoxiong, S.; Fengchong, L.; Junfeng, W. Construction of Autonomous Vehicles Test Scenarios with Typical Dangerous Accident Characteristics. J. South China Univ. Technol. Sci. Ed. 2021, 49, 1–8. [Google Scholar]
- Leveson, N.G. Engineering a Safer World: Systems Thinking Applied to Safety; The MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Stanton, N.A.; Box, E.; Butler, M.; Dale, M.; Tomlinson, E.M.; Stanton, M. Using actor maps and AcciMaps for road safety investigations: Development of taxonomies and meta-analyses. Saf. Sci. 2023, 158, 105975. [Google Scholar] [CrossRef]
- Hamim, O.F.; Ukkusuri, S.V. Determining prominent factors across system hierarchies to improve road safety in LMICs: A case study of Bangladesh. Saf. Sci. 2022, 150, 105709. [Google Scholar] [CrossRef]
- Stanton, N.A.; Salmon, P.M.; Walker, G.H.; Stanton, M. Models and methods for collision analysis: A comparison study based on the Uber collision with a pedestrian. Saf. Sci. 2019, 120, 117–128. [Google Scholar] [CrossRef]
- Delikhoon, M.; Zarei, E.; Banda, O.V.; Faridan, M.; Habibi, E. Systems thinking accident analysis models: A systematic review for sustainable safety management. Sustainability 2022, 14, 5869. [Google Scholar] [CrossRef]
- Sha, Y.; Hu, J.; Zhang, Q.; Wang, C. Systematic analysis of the contributory factors related to major coach and bus accidents in China. Sustainability 2022, 14, 15354. [Google Scholar] [CrossRef]
- Gonzalez Barman, K. Accident causation models: The good the bad and the ugly. Eng. Stud. 2023, 15, 75–100. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hierarchy | Participant |
|---|---|
| National committees | Government |
| Regulatory bodies and associations | Emergency rescue department, Transportation department |
| Enterprise management | Automobile sales enterprises, Automobile production enterprises, Road maintenance units, Engineering consulting and supervision units, Construction and construction units, Heavy-duty semi-trailer enterprises, Online car hailing enterprises, Hitch platforms |
| Technical and operational management | Human driver, Auxiliary driving vehicle |
| Driving processes | Human driver, Auxiliary driving vehicle |
| Road environmental elements interference | Central dividing belt guardrail, Construction area warning signs, Construction area anti-Collision vehicles, Construction area warning signs, Construction area protection facilities, Side guardrail end, Side guardrail column, Road marking, Safety island end anti-collision drum, Heavy semi-trailer driver |
| Element Classification | Specific Content |
|---|---|
| Road static facility elements | The central divider guardrail is not set up as required |
| Insufficient warning signs in construction area | |
| Insufficient protection facilities in construction area | |
| The abduction slope of the end of the side guardrail is too large | |
| There is no filler in the anti-collision drum at the safety island end | |
| The distance between the guardrail columns on the side of the road is too long | |
| The transition defect of the connection between the graded section and the straight section of the road marking in the square of the road marking toll station | |
| Traffic dynamic characteristic elements | Anti-collision cushion of heavy special operation vehicle in construction area is not completely put down |
| The driver of the heavy semi-trailer did not observe the operation specifications when overtaking | |
| Weather transient condition elements | Inapplicability |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Published by MDPI on behalf of the World Electric Vehicle Association. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, Y.; Zhou, W. Correlation Method of Assistance Driving Function and Road Environment Factors in Investigation of Intelligent Vehicle Traffic Accident. World Electr. Veh. J. 2025, 16, 158. https://doi.org/10.3390/wevj16030158
Hu Y, Zhou W. Correlation Method of Assistance Driving Function and Road Environment Factors in Investigation of Intelligent Vehicle Traffic Accident. World Electric Vehicle Journal. 2025; 16(3):158. https://doi.org/10.3390/wevj16030158
Chicago/Turabian StyleHu, Yanbin, and Wenhui Zhou. 2025. "Correlation Method of Assistance Driving Function and Road Environment Factors in Investigation of Intelligent Vehicle Traffic Accident" World Electric Vehicle Journal 16, no. 3: 158. https://doi.org/10.3390/wevj16030158
APA StyleHu, Y., & Zhou, W. (2025). Correlation Method of Assistance Driving Function and Road Environment Factors in Investigation of Intelligent Vehicle Traffic Accident. World Electric Vehicle Journal, 16(3), 158. https://doi.org/10.3390/wevj16030158