Abstract
This paper presents a pioneering and novel analysis of the synergistic relationship between China’s leadership in electric vehicle (EV) adoption and the rapid advancement of autonomous driving (AD) technologies within the nation’s mobility ecosystem. Challenging the conventional view of electrification as a parallel trend, this study introduces a new perspective by demonstrating how EV infrastructure serves as a fundamental enabler of autonomy, providing the necessary high-voltage architectures for critical AD functions like real-time sensor fusion and over-the-air updates. In doing so, it addresses the central research question: How does large-scale electrification influence the architecture, deployment, and safety development of autonomous driving vehicles, particularly in the context of China’s intelligent mobility ecosystem? Through technical analysis and industry examples, the paper offers original contributions by illustrating how EV-driven platforms overcome the inherent limitations of internal combustion engine systems, enhancing autonomous execution and system reliability. Furthermore, this research provides novel insights into China’s unique public–private innovation ecosystem, highlighting the role of vertically integrated startups and cross-sector coordination in driving AD development. By analyzing these previously overlooked systemic interactions, the paper posits that China’s EV dominance strategically amplifies its autonomous vehicle ambitions, positioning the nation to lead the next generation of intelligent transportation systems.
1. Introduction
The integration of autonomous driving technologies with electric and hybrid electric vehicles (EV/HEV) marks a transformative era in modern transportation. This convergence is driven by environmental concerns, advances in artificial intelligence (AI), and the evolution of sensor and system integration technologies. Autonomous electric vehicles (AEVs) not only promise reduced carbon emissions but also represent the pinnacle of smart mobility, combining sustainability with cutting-edge innovation [1,2,3]. While AEVs can reduce lifecycle emissions and enable smart mobility, automation may paradoxically raise total emissions if deployed ahead of large-scale electrification or without demand-management. Aligning automation with electrification and grid decarbonization is therefore essential to secure net environmental benefits.
Despite the increasing body of research on both electric vehicles (EVs) and autonomous driving (AD) technologies, few studies have explored how large-scale electrification fundamentally enables and accelerates the development of AD functions, particularly in the context of private passenger vehicles. Most existing literature treats electrification and autonomy as parallel or loosely connected trends, overlooking the deep architectural and systemic interdependencies between them. This paper aims to fill this research gap by analyzing how high-voltage EV platforms, coupled with integrated AI and sensor ecosystems, serve as structural enablers for real-time autonomy. Focusing specifically on private EVs in China’s rapidly evolving mobility landscape, the study examines technical, infrastructural, and socio-institutional factors that jointly facilitate the convergence of electrification and autonomy. By articulating this synergy, the paper provides a novel systems-level framework that moves beyond fragmented technical reviews and contributes to a more holistic understanding of intelligent mobility.
While numerous review articles have examined individual technologies such as electric vehicles (EVs), autonomous driving systems, and their sensor, AI, or policy dimensions in isolation [4,5,6], few studies have addressed the systems-level architectural synergy between EVs and autonomous driving (AD), particularly in the context of China’s innovation ecosystem. Most existing reviews tend to focus either on technological capabilities or adoption barriers without investigating how EV infrastructure intrinsically enables and accelerates AD deployment. This paper fills that gap by offering a novel contribution: it frames large-scale electrification not merely as a concurrent trend, but as a structural enabler of autonomy, with implications for vehicle design, safety validation, Over-the-Air (OTA) functionality, and real-time AI control. Moreover, by incorporating China’s public–private innovation model, vertically integrated startup dynamics, and policy alignment, this study delivers new insights into how national innovation systems can amplify the Electric Vehicle–Autonomous Driving convergence. Therefore, unlike traditional literature reviews, this paper integrates technical, architectural, and institutional perspectives into a forward-looking systems framework to explain the emergence of intelligent mobility.
At the heart of AEVs lies a complex symbiosis of AI algorithms, sensor arrays, and integrated frameworks. Sensors such as Lidar, radar, ultrasonic devices, and high-resolution cameras form the foundation of environmental perception, enabling vehicles to sense dynamic driving environments in real time. These sensor systems work collaboratively through sensor fusion techniques, employing Kalman filters, particle filters, and deep learning models to provide a coherent understanding of surroundings even when individual sensors have limitations [7,8,9]. Sensor calibration and reliability under various environmental conditions remain key areas of ongoing research [10,11,12]. AI serves as the cognitive engine of autonomous systems, interpreting sensor data to make context-aware decisions. Techniques like convolutional neural networks (CNN), recurrent neural networks (RNN), and reinforcement learning are widely applied to object recognition, lane detection, pedestrian tracking, and path optimization tasks [13,14,15].
AI also facilitates intelligent navigation and high-level decision-making, enabling safe operation in both urban and highway environments [16,17]. Furthermore, real-time path planning and behavior prediction are enhanced through deep learning architectures [18,19]. Simultaneously, the integration of AI with electric drive systems improves operational efficiency. AI-powered battery management systems (BMS) monitor charge status and optimize charging cycles, thereby extending battery life and improving range estimation [20,21]. Predictive maintenance technologies powered by AI can forecast component wear and recommend timely servicing, minimizing downtime and repair costs [22,23]. System integration in AEVs is multifaceted, encompassing vehicle-to-everything (V2X) communication, cloud–edge computing, and over-the-air (OTA) updates [24,25]. Internet of Things (IoT) frameworks enable real-time interaction between vehicles and infrastructure, supporting applications such as intelligent traffic routing and dynamic charging coordination [24,26]. AI-driven OTA platforms continuously upgrade in-vehicle systems, introducing new features and addressing security threats [27,28].
Modern AEVs also adopt co-design strategies for hardware and software, balancing computational load between central processing units and dedicated accelerators [29,30]. Vision-based systems utilizing OpenCV and embedded platforms achieve high levels of automation while reducing costs [31]. Simulation and digital twin environments are increasingly used to evaluate autonomous vehicle behavior under various driving scenarios [32,33]. Despite substantial progress, major challenges remain. Ensuring robust performance in adverse weather, achieving real-time multi-sensor data fusion, resolving ethical dilemmas in decision-making, and complying with diverse regulatory frameworks continue to be critical areas of concern [34,35,36,37].
The dynamic nature of AI also raises issues of explainability, reliability, and safe integration into traditional vehicle platforms [38,39]. Lastly, public acceptance of fully autonomous EVs and the legal liabilities associated with them must be addressed in tandem with technology deployment [15,40]. In response, the research community is developing next-generation AI algorithms tailored for heterogeneous environments, with a focus on generalization, energy efficiency, and multi-agent coordination [41,42]. Cross-disciplinary collaboration is also fostering innovations that unify perception, localization, and planning into cohesive software stacks [43,44,45].
This paper explores the technological foundations of autonomous driving in electric and hybrid vehicles, reviewing key developments in sensors, AI algorithms, and system integration. Through a comprehensive survey of current research and industrial practices, we aim to highlight state-of-the-art solutions, identify existing bottlenecks, and propose potential pathways for future advancement in the AEV domain.
It is important to clarify that this paper specifically focuses on the development of autonomous driving technologies within the context of private electric vehicles (EVs). While various vehicle categories, such as sports cars, commercial trucks, and buses, have different design requirements, operational environments, and use-case constraints, this study narrows its scope to personal passenger vehicles. The rationale for this focus lies in the distinct consumer-driven innovation cycle, regulatory flexibility, and integration pace associated with private EVs, which differ significantly from those of public transportation systems or heavy-duty fleets. As such, the findings and arguments presented here should be interpreted within the framework of privately owned EVs, and may not generalize directly to other vehicular domains such as logistics, mass transit, or specialized industrial transport.
The remainder of this paper is structured as follows. Section 2 provides a technical overview of the enabling technologies for autonomous electric vehicles, focusing on sensor systems, AI algorithms, and their integration with EV platforms. Section 3 reviews the infrastructure and system-level requirements that support real-time autonomy, such as over-the-air updates, edge-cloud frameworks, and vehicle-to-everything (V2X) communication. Section 4 discusses the socio-technical factors influencing the adoption of autonomous EVs, including user trust, regulatory landscapes, and the contrasting dynamics between personal and public vehicle use cases. Finally, Section 5 offers conclusions and outlines future research directions, with an emphasis on emerging technologies and policy considerations that can accelerate the synergy between electrification and autonomy.
Beyond outlining the contents, this paper adopts a problem–solution logic. Section 2 analyzes the technological foundations that enable autonomy on EV/HEV platforms. Section 3 extends this analysis to infrastructure and systemic enablers, showing how technical capabilities are embedded into China’s broader innovation ecosystem. Section 4 then identifies the remaining bottlenecks and challenges, before Section 5 synthesizes these insights into targeted policy recommendations. Together, the sections form an integrated framework that moves from technical enablers to systemic supports, to challenges, and finally to actionable solutions.
We systematically reviewed peer-reviewed literature (2015–2024), government/industry white papers (e.g., MIIT, CAAM, SAE-China), and representative case studies selected by (i) relevance to EV–AD integration and (ii) ecosystem influence. We applied triangulation by validating each major claim with at least two independent source types, ensuring both breadth and reliability.
2. Technological Synergy Between EV/HEV and Autonomous Driving
Building on the introduction, this section provides the technical foundation by explaining how EV/HEV platforms inherently support the requirements of autonomous driving. As the automotive industry evolves toward autonomy, electric and hybrid vehicles (EV/HEV) have proven to be the ideal platforms to support the advanced requirements of autonomous driving technologies. The synergy between these two fields is not just coincidental; it is driven by technological needs and the increasing demand for smart, sustainable, and reliable mobility solutions. In this chapter, we will explore how EV/HEV platforms overcome the challenges posed by traditional internal combustion engine (ICE) vehicles and offer substantial advantages for autonomous driving systems.
2.1. Overcoming ICE Limitations with Electric Vehicles
Electric vehicles (EVs) eliminate a critical bottleneck that hampers internal-combustion-engine (ICE) cars equipped with advanced autonomous-driving stacks, the scarcity and instability of low-voltage electrical power [46]. In a modern EV, the traction pack (400–800 V) functions like an oversized power bank: a bidirectional, isolated DC-DC (Direct Current to Direct Current) converter steps this high voltage down to a rock-steady 12–48 V rail for cameras, Lidars, radars and domain controllers. a high-voltage pack with an isolated DC–DC converter delivers a stable 12–48 V rail with tens of millivolts-level ripple under dynamic loads, and state-of-the-art automotive DC–DC designs commonly achieve >90% efficiency [47]. By contrast, alternator-based low-voltage rails in ICE platforms experience substantially higher disturbances during load transients. The markedly lower ripple in EV architectures underpins higher perception/controller reliability.
Because that converter is bidirectional, it also acts as an electronic shock absorber, smoothing large transients when traction inverters or HVAC (heating, ventilation, and air conditioning) compressors switch on. Voltage deviation remains within ±2%, satisfying ISO 16750-2 [48] Class IV limits for safety-critical electronics. In contrast, the 12 V lead-acid battery in an ICE car is designed for short cranking bursts; if it is deep-cycled to keep autonomous sensors alive while the engine is off, capacity can fade by 20–30% in only a few dozen events.
Conversely, electric vehicles overcome this limitation with a consistent, stable energy source. The high capacity of EV batteries ensures that sensors and computational systems are powered continuously, making EVs more suitable for the increasingly complex requirements of autonomous driving. Additionally, the regenerative braking system in EVs can help to optimize energy use and reduce the burden on the vehicle’s battery, further enhancing the overall efficiency of the AV system.
However, despite these advantages, the current EV market has limitations. The global market share of EVs, while growing rapidly, is still less than ICE. And some regions, like northeastern China, have very few EVs due to cold weather impacting range and battery performance.
From a technical perspective, autonomous driving is achievable in ICE vehicles, with many OEMs producing L2 and L2+ systems in ICE cars. Some startups have even created L4 demos using ICE platforms. However, integrating autonomous systems into ICE vehicles presents greater challenges. ICE vehicles often require more complex engineering solutions to ensure a stable power supply for autonomous systems, increasing costs and complexity compared to EVs. While technically feasible, achieving reliable autonomous driving on ICE platforms is considerably more difficult than on EVs.
2.2. OTA Updates and Their Role in Autonomous Driving
Another crucial advantage of electric vehicles in the context of autonomous driving is their ability to seamlessly integrate over-the-air (OTA) updates. As autonomous driving systems rely heavily on continuous software updates to improve their performance and safety, the ability to conduct these updates remotely is essential. Electric vehicles, with their always-on power systems, provide the ideal platform for this functionality.
The architecture of electric vehicles allows for uninterrupted operation of communication systems, which is a fundamental requirement for OTA updates. The powertrain’s design ensures that the vehicle can remain connected to the network while being charged, enabling the software updates that are essential for the continuous development of autonomous driving features. The vehicle’s charging status is integrated with the cloud-based system, allowing for remote updates of sensor calibration, AI algorithms, navigation maps, and safety features without the need for the vehicle to be physically serviced [34,49].
ICE vehicles, by contrast, depend on a running engine or at least “ignition-ON” to protect the 12 V battery during lengthy downloads. Starting an engine in an underground garage at night purely for an update can violate local noise and emissions ordinances and is often blocked by the body-control module for safety reasons. Even when remote updates are possible, the need to idle wastes fuel and creates CO2 and NOx that EVs avoid. The EV architecture also isolates the update client on an auxiliary ECU; if a flash fails, the main autonomous stack reboots from a “golden image” (a validated local software baseline used as a trusted fallback—enables safe rollback if an update fails), while the DC-DC converter continues to power both rails, eliminating the risk of bricking mid-drive [47].
The ability of electric vehicles to conduct these updates without such restrictions provides a significant advantage in terms of convenience, safety, and technological advancement, ensuring that autonomous driving systems can evolve continuously in response to new challenges and regulatory requirements. OTA capabilities make it possible for vehicles to be upgraded automatically, reducing downtime and enhancing user experience [49]. To ensure reliability, OTA update systems integrate multi-layer safeguards, including encrypted transmission, integrity verification, and rollback mechanisms that restore a validated “golden image” if an update fails.
2.3. Electric Drivetrain and Gearbox Technologies for Autonomous Execution
Execution in autonomous driving refers to the process of translating perception and planning outputs into physical vehicle actions, such as steering, braking, and acceleration. It is the final and most safety-critical stage of the autonomous driving pipeline. This section examines how the simplified drivetrain architecture and instant torque delivery of electric vehicles provide a superior platform for precise and reliable execution compared to internal combustion engine (ICE) platforms.
The electric drivetrain and transmission systems in electric vehicles provide a critical advantage for autonomous driving. In autonomous driving systems, execution involves three main components: perception, planning, and control. Perception refers to the ability of the vehicle to sense its environment, planning is the decision-making process about how the vehicle should behave, and execution is the translation of these decisions into physical actions, such as steering, braking, and acceleration. A smooth and efficient execution phase is essential for the reliable operation of autonomous vehicles.
Electric drivetrains offer several key benefits for the execution phase of autonomous driving. The primary advantage lies in the simplicity and responsiveness of electric motors. Unlike the mechanical complexity found in internal combustion engine (ICE) vehicles, electric motors provide immediate torque, which enables smooth, precise control over the vehicle’s movement. This feature is essential for the smooth execution of complex maneuvers, such as lane changes, acceleration, and deceleration in response to real-time sensor data and environmental conditions.
Moreover, the absence of a traditional gearbox in electric vehicles eliminates the need for complex gear shifting, which can introduce delays and inefficiencies in the execution phase [50]. In ICE vehicles, the shift from one gear to another can cause a lag, making the vehicle less responsive to immediate environmental changes. This is especially problematic for autonomous driving, which requires real-time, precise responses to sensor data in dynamic driving environments. Electric vehicles, by contrast, utilize a single-speed transmission, which provides a direct and efficient transfer of power to the wheels, ensuring that the vehicle remains agile and responsive [51].
This drivetrain advantage not only improves the overall driving experience but also enhances the safety and reliability of autonomous systems. With precise and rapid control over vehicle movement, electric vehicles are better equipped to handle the nuanced demands of autonomous execution, such as avoiding obstacles, adjusting speed for tight curves, and following intricate traffic patterns. Furthermore, electric vehicles’ integration with AI-based control systems allows for optimal coordination between perception and action, improving overall system performance and reducing the risk of errors during execution.
2.4. Functional Safety Advantages of EV/HEV Architectures for ASIL-D Autonomous Systems
A critical yet often overlooked benefit of electric and hybrid electric vehicles (EV/HEVs) lies in their natural alignment with functional safety requirements, particularly under the ISO 26262 standard for automotive electronics. As autonomous driving systems evolve toward ASIL-D (Automotive Safety Integrity Level D) certification, the most stringent safety classification, vehicles must ensure continuous, fault-tolerant operation, especially in power supply design. EV/HEV platforms offer unique architectural advantages that address these requirements more effectively than traditional internal combustion engine (ICE) counterparts.
Modern autonomous systems rely heavily on centralized domain controllers and a distributed network of sensors, all of which must remain operational even during a partial failure. ISO 26262 mandates that critical systems such as perception units, decision-making modules, and actuator controls must be powered redundantly, meaning that in the event of a single power source failure, a backup system must seamlessly take over without performance degradation or system shutdown.
EV/HEV platforms inherently facilitate such redundancy through their integrated high-voltage DC-DC converters and auxiliary 12 V battery systems. The dual power architecture enables simultaneous, isolated power delivery to intelligent driving domain controllers (e.g., NVIDIA Orin, Black Sesame A1000) and safety-critical sensors (Lidar, radar, cameras). In practice, this allows for redundant power rails where the main controller operates from one source (e.g., high-voltage DC-DC) and the fallback is instantly handled by the 12 V auxiliary battery in the event of a primary failure.
This dual-source power system is not only crucial for sensor uptime but also ensures that vehicle control units can maintain emergency braking, steering overrides, and fail-safe modes even during voltage drops, wiring faults, or short circuits. In contrast, ICE-based architectures typically rely on a single alternator-powered 12 V system, which lacks the robustness needed for ASIL-D compliance without significant reengineering.
Moreover, the modularity of EV powertrains allows easier isolation of high-risk functions and enhances diagnostic coverage, another ISO 26262 requirement. By embedding independent power monitoring and control logic at the subsystem level, EV/HEV-based autonomous platforms can detect anomalies early, initiate predictive fault handling, and preserve overall system integrity in real time.
As such, the convergence of electrified powertrains and autonomous technologies is not merely a technological convenience, but a safety-enabling necessity. The structural capabilities of EV/HEV platforms naturally align with the rigorous safety requirements of high-level autonomy, making them indispensable in the realization of reliable, certifiable intelligent mobility systems.
2.5. Heat Dissipation in Autonomous Driving Systems
Autonomous driving systems, particularly those utilizing high-performance chips like NVIDIA’s Drive Orin, generate substantial heat due to the intensive computations required for real-time decision-making, environment perception, and AI processing. These chips, often operating at the cutting edge of deep learning algorithms, produce considerable heat during operation. This heat dissipation challenge is addressed through advanced thermal management technologies available in electric vehicle (EV) platforms. EVs are typically equipped with multi-path heat pump systems, energy consumption prediction mechanisms, and shared liquid cooling systems that efficiently regulate the temperature of their components.
Unlike internal combustion engine (ICE) vehicles, which generally rely on air cooling or lack liquid cooling systems entirely, EVs incorporate liquid cooling for their three main electrical components: the battery, motor, and inverter. The requirement for robust cooling in autonomous driving systems, such as the domain controller and various sensors, can be met by sharing this liquid cooling system with the electric control system. This eliminates the need for the separate cooling designs that would otherwise be required in ICE vehicles, where an autonomous driving system would necessitate an additional liquid cooling setup. By integrating this function into the existing cooling system, EVs not only reduce costs but also improve the overall system efficiency, ensuring stable performance even in “standby” states. This synergy between thermal management and autonomous driving technology in EVs offers a more sustainable and cost-effective solution compared to ICE vehicles, where the lack of inherent thermal management structures results in higher design and operational costs. For reference, AD compute platforms (e.g., domestic L2+/L3 SoCs and NVIDIA Orin) typically operate in the ~80–120 W range. EV liquid-cooling loops can dissipate >300 W per controller node at ~65 °C coolant temperature, while air-cooled ICE ECUs typically sustain ≤50 W, highlighting the need for EV-grade thermal solutions. These values are representative and architecture-dependent.
2.6. Electric Drive Systems and Dynamic Efficiency
Electric drive systems, encompassing the Motor Control Unit (MCU) and electric motor, provide superior controllability, responsiveness, and linearity in power delivery, which are crucial for autonomous driving performance. EVs offer instantaneous torque and smooth acceleration, eliminating the inherent delays caused by gear shifting and combustion cycles in traditional internal combustion engine (ICE) vehicles. This instant power delivery is essential for maintaining the responsiveness of autonomous driving systems, which must react to rapidly changing environments and sensor data in real-time.
EV platforms also benefit from advanced energy recovery systems, which can be seamlessly integrated with predictive braking systems like Predictive ACC (Adaptive Cruise Control) or e-Horizon technologies. These systems allow for efficient energy use by recovering braking energy and feeding it back into the battery, optimizing overall vehicle performance. The predictive algorithms embedded in these systems also ensure a smoother, more responsive driving experience, enhancing the vehicle’s ability to navigate complex urban and highway environments with minimal energy consumption.
Moreover, the design of electric drive systems, particularly those that use integrated powertrains such as three-in-one or two-in-one systems, offers another significant advantage. These systems combine the motor, controller, and transmission into a single unit, simplifying control algorithms and significantly reducing the complexity of the drive system. This simplification makes it easier to implement sophisticated autonomous driving functions compared to ICE vehicles, which often require complex multi-component drivetrains that can introduce inefficiencies and delays in vehicle response. The integration of electric drive systems and autonomous driving technology thus leads to smoother, more efficient operation, improving both vehicle performance and the overall driving experience for the user.
2.7. Data Sharing Through Telematics and Vehicle Network
The implementation of advanced autonomous driving systems requires continuous data feedback to refine algorithms and improve system performance. EVs, by their very nature, are equipped with telematics services that facilitate real-time data transmission. These services allow for the seamless upload of critical data, such as battery health, safety parameters, and operational metrics, to external systems. Autonomous driving systems can leverage this functionality by utilizing the vehicle’s telematics box (T-Box), a component that serves as the communication hub between the vehicle and external cloud-based systems, enabling the continuous sharing of data for research, analysis, and system updates.
For autonomous driving to evolve, especially in advanced systems, data feedback loops are essential. A prime example is Tesla’s Shadow Mode, where vehicle data is continuously fed back to the cloud for analysis and algorithm improvement. EVs, with their built-in vehicle network and data transmission capabilities, are ideally suited for this task, providing the necessary infrastructure for effective data gathering and over-the-air (OTA) updates. This continuous flow of information allows for the continuous training of AI algorithms and the refinement of driving models, which are critical for the safe and efficient operation of autonomous vehicles.
In contrast, many traditional ICE vehicles for most Chinese models, especially older models, are not equipped with integrated vehicle networks or telematics systems. As a result, autonomous driving technologies in these vehicles would require costly and complex retrofits to enable similar data transmission capabilities. The absence of a vehicle network in ICE platforms necessitates the addition of dedicated infrastructure to support autonomous driving, increasing both the cost and complexity of the system. EVs, however, with their pre-existing telematics systems, reduce the need for such additional infrastructure, enabling a more cost-efficient implementation of advanced autonomous driving systems. Moreover, the integration of OTA updates and real-time data sharing further streamlines the deployment of autonomous technology, ensuring that EVs are always equipped with the latest features, optimizations, and safety updates.
2.8. Future Prospects and Innovations
The convergence of electric vehicle (EV) platforms and autonomous driving technologies represents a transformative shift in the automotive industry, laying the foundation for the next generation of intelligent mobility. As automakers increasingly turn to EV/HEV platforms for autonomous driving, the future of this synergy looks both promising and dynamic. Continuous innovation in these fields is expected to drive significant progress in both vehicle performance and the broader mobility ecosystem.
One of the most notable advancements on the horizon is the development of more efficient electric drivetrains. With innovations aimed at achieving higher torque density, improved energy efficiency, and faster charging times, future electric drivetrains will provide even more robust platforms for autonomous vehicles (AVs). These improvements will not only enhance vehicle performance but also contribute to extending driving range, reducing charging downtime, and optimizing overall energy consumption—crucial factors for the long-term scalability of autonomous driving systems.
In parallel, advancements in AI algorithms and sensor fusion technologies will continue to improve the coordination between perception, planning, and execution phases of autonomous driving. As the accuracy and reliability of environmental sensing improve, EVs will become increasingly adept at handling more complex and diverse driving scenarios. For instance, AI systems will enhance the vehicle’s ability to navigate not just urban environments with dense traffic, but also rural roads with less infrastructure, where sensor calibration and decision-making become more challenging. This adaptability will expand the operational domain of autonomous vehicles, moving them closer to full autonomy in diverse conditions [52,53,54,55].
Additionally, sensor technologies, such as Lidar, radar, and cameras, will evolve to provide more detailed and accurate environmental data. The fusion of these sensor inputs with advanced AI processing will enable more robust decision-making capabilities, helping AVs identify, predict, and respond to dynamic situations with greater precision and speed. With the rapid development of solid-state Lidar and high-resolution cameras, for example, these systems will be able to operate in varied weather conditions and challenging light environments, further enhancing the safety and reliability of autonomous driving [10,11].
The role of over-the-air (OTA) software updates will also become more central in the future of EV and autonomous driving. As vehicles collect and share more data through integrated telematics systems, they will be able to continuously improve their driving algorithms, performance, and safety features. This real-time data feedback loop, coupled with AI-powered advancements, will enable autonomous driving systems to evolve in response to new challenges and regulatory requirements without requiring physical intervention at service centers. Over time, this capability will help streamline the deployment of autonomous technology, minimizing downtime and enhancing the overall user experience.
Looking beyond individual vehicles, the broader infrastructure for intelligent transportation systems (ITS) will become increasingly integrated. EVs, as key components of this ecosystem, will work alongside connected smart cities, leveraging V2X (Vehicle-to-Everything) communication, 5G connectivity, and smart infrastructure to optimize traffic flow, reduce congestion, and improve safety. Autonomous vehicles will be able to interact with traffic signals, road signs, and other vehicles in real-time, providing a level of coordination and efficiency previously unattainable.
In conclusion, the integration of EV/HEV platforms with autonomous driving technologies offers a comprehensive, sustainable solution to the challenges of modern transportation. As both fields continue to advance, the synergy between electrification and autonomy will play a pivotal role in creating safer, more efficient, and environmentally friendly transportation systems. With continuous innovation in AI, sensors, and vehicle electrification, the future of intelligent mobility is poised to redefine how we think about transportation, providing greater freedom, flexibility, and sustainability for all. Table 1 shows the summary of technological synergies between EV/HEV vehicles and autonomous driving.

Table 1.
Technological synergies between EV/HEV and autonomous driving.
3. Characteristics of China’s Autonomous Driving Landscape Under Electrification
Having established the technological underpinnings in Section 2, Section 3 now turns to the infrastructural and systemic context, focusing on how China’s policies, investments, and industrial ecosystems accelerate the EV-AD convergence. As electrification becomes the foundational infrastructure for autonomous driving, China’s unique policy environment, industrial ecosystem, and market dynamics have positioned it as a global leader in intelligent mobility innovation. This section explores the structural, technological, and strategic characteristics that define China’s autonomous driving landscape under the influence of large-scale EV adoption. This section aims to provide a system-level understanding of how China’s integrated approach, encompassing national policy, startup ecosystems, chip and sensor innovation, and smart infrastructure, accelerates the co-evolution of electric and autonomous vehicle technologies. By examining this synergy, the section highlights China’s role not merely as a fast adopter, but as a designer and exporter of next-generation intelligent mobility paradigms.
3.1. National Policy Support and Electrification as a Catalyst
China’s dominance in electric vehicle (EV) adoption, accounting for nearly 60% of global EV/HEV sales in 2024, has laid not only a technological but also a strategic infrastructure foundation for the advancement of autonomous driving (AD) [56]. Two cornerstone policies anchor this transformation: the New Energy Vehicle Industry Development Plan (2021–2035) and the Intelligent Vehicle Innovation and Development Strategy. These national strategies articulate more than just high-level aspirations, they establish quantifiable milestones (e.g., L4 autonomous deployment by 2030), assign responsibilities across ministerial agencies, and incentivize implementation by state-owned enterprises, private OEMs, and municipal authorities.
Central to these policies is the concept of electrification as a platform, not merely a drivetrain shift. The EV platform’s high-voltage architecture provides consistent power delivery for computation-heavy tasks like real-time perception, HD map processing, and vehicle-to-everything (V2X) communication. This is particularly critical in China’s urban settings, where AVs operate in congested, multi-agent environments requiring fast sensor fusion and ultra-low-latency control loops [57].
In contrast, internal combustion engine (ICE) vehicles present energy management limitations. Their fluctuating power availability, especially at idle or during engine-off states, cannot sustain the performance demands of Level 3+ autonomous systems. Electric vehicles, by integrating large-capacity batteries with digital inverters and advanced electronic control units (ECUs), enable continuous operation of Lidar arrays, millimeter-wave radar, multi-camera arrays, and AI accelerators, the essential stack of modern autonomous platforms.
Furthermore, China’s electrification rollout is not isolated. It is coordinated with infrastructure upgrades such as 5G V2X corridors, autonomous driving testing zones, and smart energy grids, reinforcing the link between electrification and autonomy. For instance, Beijing’s Yizhuang Zone and Shanghai’s Jiading Pilot Area feature electrified roads equipped with edge-computing roadside units that communicate directly with EVs, creating real-time urban driving simulations.
Therefore, electrification in China is not simply a facilitator of AV development, but the foundational enabler. It provides the energy, architecture, and policy coherence required for scalable, commercially viable L3–L4 autonomous systems.
3.2. Investment Landscape and Startup Ecosystem: A Global Front-Runner
As shown in Figure 1, China has absorbed more than RMB 120 billion in AV-related investment between 2018 and 2024 compared with global AV investment. This trend underscores the systemic importance of electrification in shaping the nation’s AV innovation ecosystem. This capital has not been confined to a few high-profile firms, it has catalyzed the formation of over 5000 startups, spanning full-stack autonomous solution providers, algorithm developers, AI chip manufacturers, sensor module designers, HD mapping vendors, and autonomous freight service providers [58,59,60,61,62,63]. As illustrated in Figure 1, China’s AV investment declined after 2022, while global funding continued to grow. This divergence reflects (i) consolidation after a rapid domestic startup boom, (ii) investor caution following high-profile failures, and (iii) capital reallocation to adjacent fields such as generative AI and energy storage. In contrast, Western markets maintained steadier funding by diversifying across multiple Original Equipment Manufacturer (OEM) partnerships.
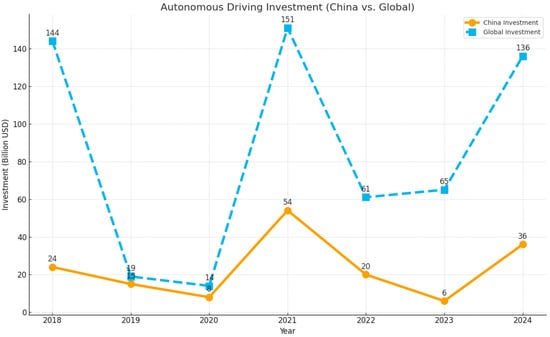
Figure 1.
Autonomous Drive Investment in China vs. Global *. * Data sourced from [58,59,60,61,62,63].
These investments are not random. They are guided by a state-industry coordination model. Central and provincial governments have established designated innovation parks, such as Shenzhen Pingshan Intelligent Vehicle Park, Hefei High-Tech Zone, and Jiading Intelligent Connected Vehicle Demonstration Area in Shanghai, which offer rent-free R&D space, corporate tax breaks, and subsidized access to closed-loop testing environments. These policy frameworks are designed to minimize time-to-market and reduce financial risk for startups, particularly in hardware-intensive areas like Lidar calibration or AV compute modules.
Flagship companies such as WeRide, Pony.ai, and DeepRoute.ai exemplify this high-velocity scaling strategy. Each has secured hundreds of millions USD in multiple funding rounds, with strategic investment participation from both local governments (via industrial guidance funds) and major OEMs such as Toyota, Dongfeng, and GAC. These companies advanced from algorithm prototyping to Level 4 pilot programs in Guangzhou, Shenzhen, and Silicon Valley within 24–36 months of founding—demonstrating unprecedented speed [64].
In Figure 2, the rapid proliferation of Chinese AV startups is illustrated, with more than 5000 companies founded across the value chain. This demonstrates how China’s venture and policy environment jointly accelerate the scaling of autonomous mobility solutions. What distinguishes the Chinese AV startup ecosystem from its Silicon Valley counterpart is its early-stage structural alignment with public systems. Rather than operate in isolation, most Chinese startups enter strategic partnerships with SOEs (State-Owned Enterprises), transport bureaus, and digital infrastructure providers from the outset [65]. For example, DeepRoute.ai works with the Shenzhen Transport Bureau on autonomous bus trials, while WeRide partners with Dongfeng Motor to accelerate the deployment of Robo-minibuses in designated corridors [66].
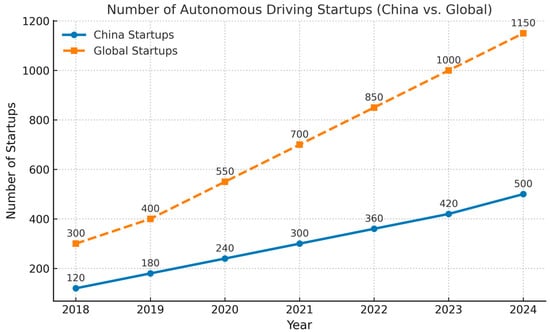
Figure 2.
Autonomous Startups in China vs. Global.
Moreover, AV capital is vertically integrated. AI chip firms (like Horizon Robotics) often co-invest with Lidar manufacturers (like RoboSense), enabling better upstream-downstream hardware/software synergy and increasing ecosystem resilience. This industrial co-development model—where suppliers, startups, and public entities co-own pilot results, reduces duplication, enhances deployment speed, and ensures technological fit with China’s rapidly evolving regulatory and urban planning frameworks.
In short, China’s AV startup ecosystem reflects a hybrid model of venture dynamism + industrial policy discipline, producing fast-growing companies with real deployment footprints, not just unicorns chasing valuation headlines.
3.3. Proliferation of Sensor Manufacturers: From Lidar to Ultrasonics
Sensors are the eyes, ears, and “intuition” of autonomous vehicles (AVs), providing the critical perception layer that enables navigation, object detection, and real-time decision-making. China, with its vast electronics manufacturing ecosystem, has rapidly transformed from a follower to a global innovation leader in AV sensor technologies: Lidar, Radar modules, HD cameras and Ultrasonic sensors.
Lidar technology, once cost-prohibitive and bulky, has become commercially viable in China due to aggressive R&D and manufacturing scale. Companies like Hesai and RoboSense have not only caught up with but outpaced legacy U.S. players such as Velodyne in terms of both unit shipment volume and system-level integration. Chinese Lidar and camera suppliers have rapidly scaled production and integration into mass-market models, lowering cost and improving robustness; this mainstreaming of advanced perception hardware now extends beyond L4 pilots into premium L2+/L3 consumer vehicles [67].
These firms also lead in solid-state Lidar and hybrid mechanical scanning units, optimized for cost-efficiency and robustness. Chinese OEMs increasingly adopt Lidar not just in L4 Robotaxis, but also in premium L2+ and L3 consumer vehicles, marking a mainstreaming of advanced perception hardware.
Complementing Lidar are millimeter-wave radar modules, typically operating in the 77 GHz and 79 GHz bands. As of 2024, over 70 Chinese radar startups are active in the sector, with companies such as Calterah Semiconductor, Maxieye, and ZongMu Tech achieving breakthroughs in in-house MMIC (Monolithic Microwave Integrated Circuit) design. These radars offer longitudinal object tracking, adaptive cruise control, and 4D imaging radar functions, essential for highway autonomy and lane-change planning.
Radar is also increasingly integrated with AI processors, enabling on-device fusion of speed, trajectory, and risk prediction, especially in multi-lane, multi-agent environments common in Chinese urban traffic.
The evolution of automotive-grade camera modules in China has been equally significant. Companies like SmartSens, OFILM, and Sunny Optical have repurposed their smartphone supply chain advantages to meet ADAS and AV-grade standards. Their products now rival Sony CMOS sensors in terms of resolution, low-light performance, and cost-efficiency. Modern camera systems include HDR (High Dynamic Range) sensors, global shutter arrays, and edge image signal processors (ISP) that preprocess visual inputs in real time. These are critical for traffic light recognition, pedestrian detection, and semantic segmentation, especially under complex lighting conditions such as tunnels or nighttime driving.
Though often overshadowed by Lidar and radar, ultrasonic sensors play an irreplaceable role in short-range maneuvering, parking assistance, and low-speed urban driving. In China, companies like INVT, JoyNext, and CanSemi mass-produce compact, low-cost modules capable of detecting objects within 0.3–5 m. These sensors are essential for Robotaxi operations in constrained environments such as airports, underground garages, and last-mile delivery stations. Their simplicity, affordability, and robustness make them ideal for redundancy in sensor fusion frameworks, especially where visual occlusion or signal interference may occur.
Together, this multi-modal sensor landscape built on China’s vertically integrated manufacturing capabilities has positioned the country to deliver complete perception stacks that are cost-effective, high-performing, and scalable. These sensors are not developed in silos but co-engineered with chip vendors, algorithm developers, and OEMs to ensure seamless fusion, signal synchronization, and reliability under real-world driving conditions.
3.4. Rise in Algorithm-Centric AI Firms
Artificial intelligence (AI) serves as the computational and cognitive core of autonomous driving (AD) systems, transforming raw sensor data into actionable vehicle control decisions. In China, algorithm-centric firms are not only catching up with global peers, they are actively shaping the future of AV software stacks, particularly in the domains of perception, planning, and simulation.
Leading the charge is Momenta, whose VisionFusion platform utilizes a BEV (Bird’s Eye View) transformer framework, combining multi-camera imagery into a unified spatial representation. This is paired with object detection through convolutional neural networks (CNNs) and trajectory forecasting via recurrent neural networks (RNNs). These systems are being integrated into production programs through OEM partnerships (e.g., Mercedes China), with scaling pathways from ADAS to higher levels of autonomy [68].
Another major player, Pony.ai, takes a reinforcement learning (RL) approach. Its AV stack is trained in dynamic urban environments such as Guangzhou, Beijing, and Fremont (California), continuously adapting to local traffic idiosyncrasies. The system has demonstrated 96%+ perception accuracy in high-density traffic scenarios, excelling at multi-agent prediction and trajectory anticipation under occlusion and uncertainty.
Meanwhile, DeepRoute.ai is pioneering HD-map-free driving, addressing the scalability limitations of current AV mapping dependencies. Leveraging self-supervised learning techniques across over 5 million kilometers of real-world driving data, the firm has reduced reliance on high-definition prior maps, instead emphasizing on-the-fly localization and context-based planning—a crucial advancement for second- and third-tier city deployments where HD maps are often outdated or unavailable.
These firms are not just engineering-driven but also academically engaged. Their researchers and engineers frequently publish at top-tier conferences such as CVPR (Computer Vision and Pattern Recognition), NeurIPS (Neural Information Processing Systems), and ICCV (International Conference on Computer Vision). Recent contributions include work on:
- Dynamic scene graph prediction for understanding pedestrian-vehicle interactions;
- Adversarial planning training to increase robustness against edge-case errors;
- Online multi-agent coordination networks, which allow AVs to negotiate merges, yields, and overtakes in dense traffic.
Importantly, the algorithms developed by these firms are designed with Chinese traffic conditions in mind, including aggressive merging behavior, high pedestrian density, and heterogeneous lane usage (e.g., motorbikes sharing car lanes). This localized optimization contrasts with Western firms, which often focus on more structured urban layouts.
In addition, Chinese AV firms are integrating their software stacks directly with OEM production lines. For instance, Momenta’s ADAS algorithms are preloaded into vehicle ECUs during manufacturing, enabling a software-defined vehicle (SDV) model where features can be remotely activated or enhanced via OTA updates as new algorithms are validated.
Collectively, this cohort of algorithm-centric companies represents a technological and strategic asset for China’s AV industry embedding intelligence not only into vehicles but also into the nation’s evolving mobility infrastructure.
3.5. Chip Ecosystem: From Emerging to Established
In the era of autonomous driving, compute power is as critical as horsepower and China is rapidly building its own stack of AV-specific silicon to reduce reliance on foreign suppliers. Against the backdrop of the global semiconductor crunch, China has made the localization of intelligent driving chips a strategic priority. This push is backed by government initiatives such as the “Made in China 2025” plan, emphasizing autonomy in core automotive electronics.
Leading this transformation is Horizon Robotics, whose Journey5 SoC (System-on-Chip) delivers 128 TOPS (Tera Operations per Second) and is certified under ASIL-B safety protocols. Designed for both L2+ ADAS and L3 AV deployment, Journey 5 supports real-time data ingestion from up to 16 camera streams, along with radar and Lidar fusion. The chip includes dedicated AI acceleration cores, image signal processors (ISPs), and fail-safe controls, making it suitable for production vehicles. As of 2024, it is already deployed in models by Chery, Dongfeng, Leapmotor, and increasingly in next-gen models from BAIC and Great Wall Motors [69].
Another major player is Black Sesame Technologies, which specializes in domain controller-level AI computing for L3 and L4 systems. Its Huashan A1000 chip features heterogeneous compute architecture, with GPU, CPU, and NPU cores, and enables high-bandwidth processing for 3D semantic segmentation and BEV-based decision-making. Its positioning as a potential replacement for NVIDIA Orin makes it a key player for cost-sensitive OEMs that aim to reduce foreign chip dependency.
Emerging firms like Suiyuan Tech and Cambricon focus on AI coprocessors for edge inference, targeting mid-tier vehicles and dedicated computing modules for object tracking, lane detection, and driver monitoring systems. These chips are often optimized for low-latency, power-efficient inference, and can be embedded into sensor modules or vehicle gateways, enabling modular AI architecture for mass-market AV rollouts.
China’s chip ecosystem also benefits from cross-domain partnerships between silicon vendors, Tier-1 suppliers, and OEMs. Horizon Robotics, for instance, collaborates with Tier-1 integrators like Desay SV and Neusoft Reach to deliver plug-and-play computing platforms. These platforms combine hardware with preloaded ADAS algorithms, reducing integration time for car manufacturers.
Meanwhile, Chinese OEMs are pursuing dual-track chip strategies. Companies such as NIO and XPeng integrate NVIDIA’s Orin-X for flagship models, leveraging its 254 TOPS to enable L3+ features such as urban pilot, memory parking, and cross-floor valet. Simultaneously, they develop custom microcontroller units (MCUs) for real-time safety overrides, redundancy, and deterministic decision-making. This hybrid compute architecture ensures both cutting-edge performance and functional safety compliance.
From national-level incentives to deep vertical integration, China is laying the groundwork for a resilient, homegrown AV chip ecosystem. While international leaders like NVIDIA and Qualcomm still dominate high-end applications, Chinese firms are closing the gap, especially in cost-to-performance ratios, power efficiency, and regulatory compatibility. As the demand for localized AV compute intensifies, these domestic chip solutions will become central to China’s push for global autonomous driving leadership. Table 2 shows the comparative specifications of China vs. International AD SoCs.
Table 2.
Specification of China vs. International AD SoCs.
3.6. Diverse Technological Routes: China’s Strategic Pluralism
Whereas U.S. players often converge on singular tech stacks (e.g., Tesla’s camera-only or Waymo’s HD map-first), China encourages diverse approaches:
- XPeng uses end-to-end transformer pipelines that predict motion from raw vision inputs.
- Apollo (Baidu) adopts classical modular AV stacks, with layered perception, prediction, and planning modules.
- DiDi utilizes simulation-first development with a focus on urban logistics and lane-level micro maneuvers.
Simulation ecosystems like CARLA, Alibaba DriveSim, and Tencent TAD allow thousands of corner-case scenarios to be tested virtually. This pluralism fosters rapid iteration and prevents ecosystem stagnation [70,71,72,73].
3.7. Urban-Rural Disparities and Regional Innovation Hubs
China’s approach to autonomous driving (AV) deployment is distinctly regionalized and stratified, shaped by differences in urban density, infrastructure maturity, economic capacity, and policy autonomy. This urban-rural asymmetry has led to the emergence of multiple innovation hubs, each with specialized priorities and deployment strategies.
3.7.1. Tier-1 Cities: Technology-Intensive Testbeds
Cities such as Beijing, Shanghai, and Shenzhen serve as national-level experimental zones for advanced AV applications. These cities are equipped with:
- High-density 5G-V2X corridors, enabling real-time vehicle-to-infrastructure (V2I) communication
- High-definition urban maps, updated frequently for localization precision
- Dedicated AV testing areas, such as Beijing’s Yizhuang Pilot Zone, which spans over 100 km2 and is embedded with edge AI units, Lidar-equipped traffic lights, and digital twin road models.
Robotaxi fleets operated by Pony.ai, AutoX, and Baidu Apollo are running semi-commercially in these cities. These services operate under a hybrid model: Level 4-capable vehicles driven with safety drivers in place, with limited geographic and temporal freedom. In some zones of Shenzhen, select Robotaxi trials have fully removed safety operators, signaling a shift toward real-world autonomy.
3.7.2. Tier-2 Cities: Logistics and Freight Corridors
Cities such as Wuhan, Chongqing, and Hangzhou are emerging as freight-centric AV hubs, focused on autonomous trucking, highway platooning, and last-mile delivery. Wuhan’s AV Logistics Corridor, for example, connects inland ports with bonded warehouses using Level 3 autonomous trucks. These corridors are equipped with roadside units (RSUs) and smart toll gates, enabling coordinated vehicle scheduling and teleoperation fallback in emergencies. These cities also test AV buses and mini-shuttles in geofenced districts, especially in industrial parks, university campuses, and airports, offering real-world data while mitigating safety risks.
3.7.3. Rural and Low-Tier Cities: The Next Frontier
China’s rural zones and third-tier cities face challenges in AV readiness:
- Limited 5G coverage;
- Sparse HD mapping;
- Low digital infrastructure penetration.
However, the central government has launched targeted subsidy programs under the Rural Digital Infrastructure Plan, encouraging AV companies to conduct low-speed logistics trials and postal delivery pilots in these regions. For example, JD Logistics operates autonomous delivery pods in county towns of Jiangsu and Sichuan, delivering parcels in areas where labor costs are high and vehicle density is low.
These environments serve as controlled testing grounds for sensor-light, AI-heavy systems that do not depend on high-resolution maps or infrastructure support. This helps push forward AV innovation for edge-case environments that urban AVs are not yet equipped to handle.
By orchestrating AV rollouts across this urban-rural gradient, China ensures a context-sensitive, tiered innovation model. Each city or region becomes a specialized lab, contributing localized data, public feedback, and regulatory insight to the national AV strategy. This dynamic accelerates both technical progress and regulatory preparedness across multiple scenarios, laying the groundwork for nationwide scalable autonomy. For example, while China’s urban 5G coverage exceeded ~85% of base stations in 2023, rural coverage remained < 40%; similarly, highways with V2X pilots surpassed ~10,000 km, but rural roads account for < 5% of deployments, indicating uneven readiness for AVs.
3.8. Integration with Smart Infrastructure and OTA Platforms
Autonomous driving (AD) in China is not evolving in isolation and it is deeply embedded in the broader transformation of urban infrastructure toward smart, responsive, and interconnected systems. In this context, smart infrastructure serves as a digital scaffold, enhancing the perception, decision-making, and control capabilities of autonomous vehicles (AVs) through cooperative intelligence.
Leading cities such as Guangzhou, Suzhou, Chongqing, and Wuxi have implemented full-spectrum vehicle-road-cloud (V2X) integration architectures. These systems allow AVs to communicate in real time with:
- Smart traffic lights, enabling predictive stopping and acceleration
- Pedestrian crossings, which transmit signals when in use or blocked
- Emergency vehicles and priority lanes, which coordinate passage rules with AVs via cloud–edge systems.
Guangzhou, for instance, has deployed over 200 roadside sensing units, enabling Level 4 AVs from firms like WeRide to coordinate with traffic management centers and dynamically re-route based on real-time congestion and construction alerts. This cooperative vehicle infrastructure system Cellular Vehicle-to-Everything (C-V2X) reduces blind spots, minimizes latency in decision loops, and improves system-wide safety and efficiency [66].
In parallel, AV software is evolving under the Software-Defined Vehicle (SDV) paradigm, where over-the-air (OTA) updates continuously enhance system intelligence post-deployment. Companies such as XPeng and NIO have developed cloud-native operating systems—Xmart OS and NAD (NIO Autonomous Driving), respectively—that integrate:
- Real-time AI model training and deployment;
- Continuous HD map layer updates;
- Remote diagnostics and sensor calibration;
- Fleet-wide coordination using big data analytics and edge AI.
XPeng, for example, pushes weekly OTA updates to improve performance in urban environments based on data collected from millions of kilometers of real-world driving. These updates can alter everything from path planning behavior to voice-assisted driving instructions, enhancing driver experience while upgrading AV capabilities without hardware changes.
These integrated SDV platforms are 5G-enabled, leveraging low-latency, high-throughput communication channels to exchange vehicle-state data, road conditions, and AI inference results between edge units and cloud centers. The cloud component hosts simulation sandboxes, enabling “digital twins” of AVs to test new functions in virtual environments before real-world rollout—greatly reducing risk.
Together, the convergence of AVs with smart infrastructure and OTA/cloud ecosystems forms the backbone of China’s strategy to achieve safe, adaptive, and scalable autonomy. It ensures not only rapid responsiveness to edge cases (e.g., road obstructions, abnormal pedestrian behavior), but also provides the digital continuity needed to transform AVs into ever-evolving intelligent agents within the city fabric.
3.9. Industrial Alliances and Collaborative Platforms
The development of autonomous driving (AV) technology in China has become a deeply collaborative process, involving a vast network of technology companies, traditional automotive manufacturers, Tier-1 suppliers, academic institutions, and government agencies. Rather than rely solely on individual corporate breakthroughs, China’s strategy promotes platform-based industrial alliances, creating an open, co-evolutionary environment for AV innovation.
At the forefront of this effort is the Apollo Autonomous Driving Alliance, launched by Baidu in 2017. As of 2024, it includes over 200 partners, spanning automotive OEMs (e.g., BAIC, FAW, Geely), chipmakers (e.g., Horizon Robotics), cloud service providers (e.g., Alibaba Cloud), and local governments. Apollo offers:
- Open-source perception and planning algorithms
- High-fidelity simulation environments
- Standardized hardware-software interfaces (Apollo Computing Unit—ACU)
- Training datasets curated from multi-sensor fleets.
Through Apollo, even smaller OEMs and regional integrators gain access to cutting-edge AV stacks without building them from scratch. The result is a modular, scalable AV development platform, reducing R&D costs and accelerating go-to-market cycles [74].
Another prominent example is DiDi Autonomous Driving, which collaborates with state-owned FAW Group and SAIC Motor on large-scale Robotaxi operations. Their fleets share a standardized hardware configuration, featuring unified sensor placements, calibration protocols, and computing architectures. This enables consistent performance and streamlined maintenance across cities such as Guangzhou, Shanghai, and Suzhou.
Huawei, while not an OEM, plays a pivotal role as an infrastructure enabler through its Mobile Data Center (MDC) solution, a modular autonomous driving computing platform. Huawei’s MDC offers customizable SoC integration, cloud–edge communication modules, and functional safety isolation layers. It is already adopted by OEMs such as SERES, Arcfox, and Avatr, providing AV compute platforms that are compliant with China’s evolving cybersecurity and data localization regulations.
Industrial alliances also extend into mapping, simulation, and regulation:
- NavInfo, AutoNavi, and municipal transport bureaus work together to deliver dynamic HD maps via open APIs.
- Simulation platforms such as Tencent TAD allow AV firms to share digital twins and test thousands of virtual edge-case scenarios.
- Joint testing centers, such as the China Intelligent Vehicle Innovation Center (CIVIC), enable pre-market safety validation aligned with Ministry of Transport standards.
These alliances function not only as technology accelerators, but also as risk-sharing consortia. By promoting standardization across sensor formats, control interfaces, and data exchange protocols, they minimize vendor lock-in and create cross-compatible AV ecosystems. This approach also deters monopolistic behavior, as it prevents any single company from controlling too many nodes in the AV value chain.
In summary, industrial alliances in China form a multi-tiered innovation fabric. They bind together R&D, policy, infrastructure, and commercialization in a way that lowers cost barriers, enhances deployment speed, and builds national competitiveness. The collaborative model not only strengthens the supply chain but also creates a resilient, scalable pathway for nationwide AV implementation.
3.10. Cross-Industry Integration and Platform Synergies
Autonomous vehicles (AVs) in China are increasingly viewed not as isolated mobility technologies but as integrated nodes in a national digital infrastructure ecosystem. The convergence of AVs with other smart systems, urban, industrial, and energy, reflects a strategic redefinition of the automobile as both a data terminal and an active agent in cyber-physical platform coordination.
3.10.1. Integration with Smart Cities
In smart urban planning, AVs are embedded into city-scale digital twins, enabling real-time coordination with traffic control, emergency response, and pedestrian flow systems. For example, in Hangzhou, AVs developed by Alibaba DAMO Academy and AutoX are connected to the city’s urban operating system, which ingests traffic sensor data, predictive analytics, and environmental inputs. Through V2I (Vehicle-to-Infrastructure) protocols, AVs receive signal phase timing, rerouting instructions, and congestion forecasts, enabling smoother traffic patterns and reduced idle emissions.
AVs also serve as mobile sensing platforms, collecting data on road quality, air pollution, and urban heat zones. This real-time data feeds back to urban management platforms, enhancing city resilience and environmental planning.
3.10.2. Smart Energy and Grid Synergy
In the realm of smart energy, Avs, particularly EV-based autonomous fleets, are key actors in Vehicle-to-Grid (V2G) systems. Companies such as NIO, in collaboration with State Grid Corporation of China, are piloting platforms in Shanghai where idle autonomous EVs feed electricity back to the grid during peak demand hours, effectively becoming distributed energy storage units [75].
These AVs operate within predictive load-balancing algorithms, which forecast grid usage and dynamically schedule charging and discharging cycles. This integration not only enhances energy efficiency but also supports China’s broader dual-carbon targets and renewable energy adoption goals.
3.10.3. Autonomous Logistics in Smart Manufacturing
AVs are also revolutionizing intra-factory logistics and supply chain automation in smart manufacturing contexts. BYD, for instance, deploys autonomous guided vehicles (AGVs) to transport battery modules within giga-factories, coordinating with robotic assembly lines through industrial 5G networks. Similarly, Haier’s cosmoplat factory network uses AV-powered logistics platforms that synchronize with AI control towers for real-time material flow, fault detection, and inventory tracking.
This AV-in-factory integration reduces labor costs, minimizes downtime, and enhances production precision—especially in multi-variant production models where flexibility is essential.
In summary, AVs in China are not simply tools of mobility but central actuators within a multi-domain digital ecosystem. By linking mobility with energy management, city operations, and industrial automation, China is positioning AVs as key infrastructure in its national smartization strategy. This cross-industry synergy not only maximizes ROI on AV investments but also lays the foundation for next-generation urban operating systems driven by AI and real-time data fusion.
3.11. Public–Private Innovation Models in Autonomous Driving
China’s approach to autonomous driving (AV) development is shaped by a hybrid governance model, which combines top-down strategic planning with bottom-up innovation. This model has proven highly effective in coordinating stakeholders, reducing institutional friction, and accelerating technological deployment in complex real-world environments.
3.11.1. Top-Down Policy Design and Regulatory Sandboxes
At the national level, ministries such as the Ministry of Industry and Information Technology (MIIT) and the Ministry of Transport (MOT) issue broad frameworks that define AV classification standards, infrastructure integration guidelines (e.g., 5G-V2X rollout), and data security protocols (e.g., cross-border AV data storage restrictions). These policies are further operationalized through municipal-level pilot zones.
The most prominent example is the Beijing High-Level Autonomous Driving Demonstration Zone, launched in Yizhuang District. Covering over 60 km2 and equipped with over 300 V2X-enabled intersections, the zone allows over 100 AVs from companies such as Baidu, Pony.ai, and WeRide to operate in real-world traffic with progressively fewer safety constraints. It provides AV-specific license plates, dynamic geofencing, and localized insurance pilots, making it a testbed for both technical and legal experimentation.
3.11.2. Bottom-Up Enterprise Innovation and Platform Co-Creation
Private firms are not passive recipients of regulation but active co-creators of the AV ecosystem. Leading technology developers partner with academia and public research institutes to create joint research platforms. For instance, the Tsinghua-Pony.ai Joint Institute for Autonomous Driving develops industry benchmarks for perception accuracy, fail-safe planning, and traffic interaction behavior. These are shared across stakeholders via white papers and policy recommendations.
Local governments often provide policy credits and fast-track approvals to AV firms that relocate R&D or testing centers to designated areas. These incentives include:
- Fleet licensing exemptions;
- Land use grants for data centers and simulation labs;
- Subsidized insurance frameworks for AV pilots: Such measures reduce the cost and friction of deploying Level 3 and above autonomy systems, especially in public-facing contexts like Robotaxis and smart buses.
3.11.3. Collaborative Governance and National Platforms
Beyond bilateral partnerships, China is establishing multi-party governance platforms. The China Intelligent Connected Vehicle Innovation Platform (CICVIP), funded by the MIIT, brings together over 300 entities, including Huawei, SAIC, CATARC, and major universities. It serves as a central hub for:
- Developing test protocols;
- Validating national datasets;
- Building shared simulation libraries: This collaborative governance approach ensures interoperability, standardization, and public accountability, even as firms compete commercially.
In essence, China’s AV public–private innovation model reflects a “guided experimentation” paradigm, where central direction sets the vision, and local actors operationalize it through adaptive learning. This layered governance allows China to pilot policies, correct technical trajectories, and build legitimacy for AVs through stakeholder inclusion, paving the way for scalable and nationally coherent autonomous mobility solutions.
China has become the epicenter of autonomous driving innovation under the enabling umbrella of electrification. Its strengths lie not only in massive investment and market scale but also in its diversified strategies and resilient ecosystem. As technical bottlenecks like long-tail safety scenarios and regulatory variance are addressed, China is poised to shape the next global wave of autonomous mobility.
4. Future Challenges of Autonomous Driving in China
While Section 2 and Section 3 demonstrate the opportunities enabled by technology and systemic support, Section 4 critically examines the challenges and limitations that remain in China’s autonomous mobility development. While systemic integration of EVs and AD has enabled rapid progress, through supportive policy, infrastructure innovation, and industrial coordination, real-world deployment continues to encounter complex challenges. Section 4 examines these limitations, including the unresolved long-tail problem in AI perception and planning, scalability bottlenecks in the startup ecosystem, safety concerns in mixed-traffic urban environments, and the growing need for ethical governance and data sovereignty. Together, these discussions provide a necessary counterbalance to the preceding section, offering a comprehensive and realistic view of the conditions that must be met for autonomous driving in China to move from promising pilot projects to resilient national systems.
4.1. The Long-Tail Challenge and Delayed L4 for Private Owned Vehicles
While China’s AV sector has achieved commendable advancements in core modules such as perception, localization, and basic decision-making, the industry continues to face significant hurdles in resolving the “long-tail problem”, a term referring to rare, unpredictable, or anomalous driving scenarios that do not appear frequently enough in datasets to train AI models effectively. These include events such as roadside construction with ad hoc signs, children playing on the roadside, or animals entering a highway, all of which can cause unpredictable agent behaviors and require contextual reasoning far beyond current systems’ capabilities [76,77,78].
In particular, the long-tail issue is especially problematic for privately owned L4-level vehicles, which are expected to function without geofencing constraints or remote monitoring. Unlike commercial Robotaxi fleets that operate within tightly controlled environments and rely on remote human teleoperators when needed, private AVs must make autonomous decisions in dynamic, unstructured, and often poorly mapped environments, such as rural areas or older urban districts.
Current reinforcement learning and simulation-based training pipelines have made progress in addressing edge cases, but behavior prediction in socially ambiguous scenarios, like whether a pedestrian intends to jaywalk, remains an unsolved challenge. AI models still struggle to infer intentions or contextual cues from subtle human behavior, which humans can interpret intuitively. Moreover, weather variability, such as heavy rain or snow, introduces additional perceptual noise, further compounding decision uncertainty.
Leading research indicates that resolving generalization across rare, high-uncertainty scenarios will require advances in multi-modal prediction and context-aware planning, making private-vehicle L4 without geofencing a long-term target rather than a near-term reality [79,80,81]. Even in tightly geofenced commercial deployments, such as Robotaxi fleets in Guangzhou or Beijing, long-tail scenarios have caused unexpected system shutdowns or erratic behavior. These have, in turn, required frequent human interventions, undermining public confidence and commercial scalability.
Consequently, while L4 systems for shared fleets in urban areas may scale incrementally, the rollout of L4-level autonomy for the consumer market, especially in unstructured, decentralized environments, is likely to be delayed until the long-tail problem is substantially mitigated through breakthroughs in generalizable AI, multi-modal prediction, and context-aware planning algorithms.
4.2. Commercial Scalability and Collapse of Chinese AV Startups
As China transitions from pilot deployments to large-scale commercialization of autonomous vehicles (AVs), the commercial scalability dilemma has emerged as a critical bottleneck, particularly for AV startups that flourished in the venture capital boom between 2018 and 2021. While early enthusiasm fueled massive investment rounds and rapid technical iteration, a combination of market overcapacity, uncertain monetization models, and inconsistent policy coordination has led to the collapse or stagnation of dozens of AV startups since 2022 [82].
Many Chinese AV startups demonstrated impressive prototypes and simulation results, yet struggled to transition to profitable business models. Their core technologies often require high-end sensors and compute units that are costly and difficult to scale. Additionally, competition from OEMs with in-house R&D capabilities or partnerships with giants like NVIDIA has crowded the startup space. Operating costs remain high for AV fleets, including remote monitoring, insurance, regular recalibration, and safety driver requirements. These factors limit profitability, especially in a market like China where ride-hailing fares are relatively low.
The capital market has also cooled, with investment shifting toward generative AI and battery tech. Some AV startups have delayed IPO plans or shut down due to internal or market issues. Without alignment with evolving government regulations or the ability to scale quickly, many smaller AV players are exiting the market, consolidating the industry around a few major firms. As illustrated in Figure 3, the financial performance of China’s autonomous driving sector reveals mounting losses among many startups, especially after 2022. This evidence highlights the commercial scalability dilemma, where high operating costs, uncertain monetization models, and market overcapacity have challenged the sustainability of numerous ventures, leading to consolidation around a smaller number of well-capitalized firms.
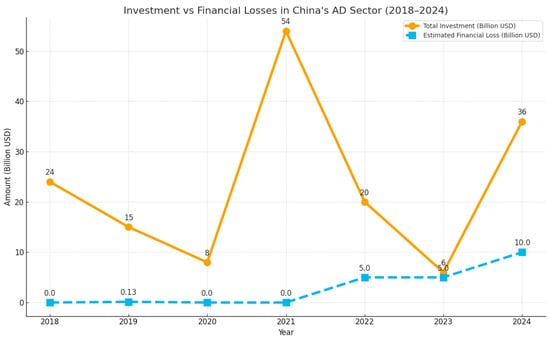
Figure 3.
Financial losses in China’s Autonomous Drive. These data are sourced from authoritative institutions such as CCID Consulting and IT Juzi.
This trend suggests that the future of China’s AV sector will be dominated by vertically integrated, well-capitalized firms capable of managing everything from AI chip design to full-stack autonomy deployment. Smaller players may survive only by focusing on niche applications, licensing software modules, or being acquired into broader technology ecosystems.
4.3. Safety and Social Acceptance in a Mixed-Traffic Society
In China’s urban environments, the coexistence of autonomous vehicles with traditional human-driven vehicles, pedestrians, e-scooters, and informal road users poses major safety and acceptance challenges. The unpredictability of traffic behavior, including jaywalking, informal signaling, and rule-bending maneuvers, makes consistent AV decision-making difficult. AVs often drive conservatively in these settings, leading to hesitancy, traffic disruption, or human driver frustration [83].
Public trust is also limited. Surveys show that less than half of Chinese urban residents fully trust AVs, with concerns including AI errors, system hacks, and unclear liability in the case of accidents. High-profile incidents involving AV test vehicles have further fueled skepticism.
Efforts to address this include external human–machine interfaces (eHMI) that display AV intent, third-party safety audits, and public dashboards explaining AV decision logic. In many districts, local governments have initiated community engagement programs where residents are invited to observe AV testing and interact with engineers [84]. On the other hand, many failure modes inside AV technologies remain unresolved, including cross-sensor conflicts, weather-induced degradation, and adversarial perturbations. Robustness testing should combine large-scale scenario simulation, HIL validation, and redundancy-driven cross-checks. Establishing benchmark libraries that cover rare events is essential for trustworthy deployment.
Surveys across regions indicate that more than half of respondents express hesitancy toward riding in AVs, driven by safety, liability, and privacy concerns. Demographic splits persist (younger/tech-savvy vs. older cohorts). Transparent safety dashboards, staged public pilots, explainable interfaces, and clear liability rules can improve trust and adoption. In the long term, building social acceptance will require not only safer AV behavior but also transparent communication with the public, inclusive regulatory design, and demonstrable benefits such as reduced traffic deaths or cleaner air, that must be clearly measured and widely publicized.
4.4. Ethical Governance and Data Sovereignty in the AV Era
As AV systems increasingly intersect with national infrastructure and citizen behavior, ethical dilemmas and data sovereignty concerns have come to the forefront. The lack of clear ethical decision-making standards, such as how to prioritize lives in unavoidable crash scenarios, has raised questions about the moral logic embedded in AV algorithms [85]. Some institutions are working on guidelines, but most AV firms remain non-transparent in how these decisions are handled.
On the data side, Chinese law mandates that AV data collected in domestic territory must be stored and processed locally. This applies to vehicle location, video footage, pedestrian biometrics, and driving behavior. Foreign firms must comply by establishing local data centers. These rules protect digital sovereignty but create challenges for global interoperability and AV export.
Furthermore, AVs collect data on bystanders and infrastructure passively, often without explicit consent. Without clear citizen opt-in mechanisms, the tension between innovation and privacy will grow unless transparent data governance frameworks are developed in parallel with technical deployment. To maintain public trust and regulatory stability, China must develop nationally unified ethical standards, improve citizen data rights, and build a multi-stakeholder AV governance framework that includes industry, government, academia, and civil society.
The promise of L4 autonomous driving remains compelling, yet its implementation is fraught with unresolved challenges. From the technical limitations posed by long-tail edge cases to the regulatory and societal hurdles of liability and trust, the industry must navigate a complex landscape. Until these foundational issues are resolved, mass deployment, particularly in privately owned vehicles, will remain a long-term goal rather than near-term reality.
4.5. Cost Dynamics of Autonomous Driving
- Hardware Capital Expenditure (CAPEX). Early L4 prototypes in China required over RMB 500,000 per vehicle for sensors and compute. By 2024, LiDAR units cost below RMB 10,000, and domestic compute SoCs reduced system costs significantly, easing bill-of-materials pressure.
- Operational Expenditure (OPEX). Safety drivers, calibration cycles, teleoperation centers, and data pipelines remain major contributors to cost per kilometer, often outweighing hardware CAPEX.
- Outlook. Industrial scaling, modular sensor suites, and fleet-based business models are expected to reduce OPEX, moving AVs closer to cost parity with human-driven ride-hailing. Nonetheless, competitiveness will depend as much on operational innovation as on hardware cost curves.
4.6. Analytical Findings and Compact Indicators
After above review, this subsection provides concise analytical results to complement the conceptual synthesis:
- Power quality: EV auxiliary DC–DC converters typically maintain tens-of-millivolts ripple on 12 V rails under load, compared with significantly higher ripple and disturbances reported for ICE alternator systems, thereby improving sensor and ECU stability.
- Investment and consolidation: Substantial AV investment since 2018 has been accompanied by notable startup exits and consolidations, highlighting that capital efficiency and OEM integration are stronger predictors of sustainability than raw funding levels.
- Component cost trends: LiDAR average selling prices in China have dropped from ~RMB 70,000 (2018) to below RMB 10,000 in 2024, while domestic SoCs have meaningfully improved TOPS-per-dollar competitiveness, reducing compute system cost for L2+/L3 stacks.
- Execution smoothness: EV single-speed drivetrains inherently avoid shift-induced torque discontinuities, lowering jerk and improving trajectory tracking relative to ICE multi-speed powertrains.
Table 3 illustrates the compact indicators for EV-AD convergence.
Table 3.
Compact indicators for EV-AD convergence.
4.7. Cybersecurity, xAI, Legal and Regulatory Frameworks
Cybersecurity threats include V2X spoofing, sensor jamming, OTA manipulation; mitigations include hardware root-of-trust, in-vehicle IDS, and authenticated communications.
Explainable AI (xAI) is needed to integrate interpretable layers (attention maps, rule-based checks) to support auditability and incident analysis. Legal and regulatory uncertainty remains a critical barrier to AV deployment. EU frameworks stress UNECE WP.29 compliance and safety validation; the U.S. follows state-level pilot regimes with product liability as the main axis; China advances municipal pilot zones and regulatory sandboxes. Key challenges include liability attribution in crashes, data governance, and cybersecurity of connected fleets. Proposed solutions include (i) harmonizing safety validation protocols internationally, (ii) establishing AV-specific insurance frameworks for L3–L4 systems, and (iii) implementing adaptive regulatory sandboxes that evolve with technological maturity. For China, clarifying liability allocation, expanding insurance pilots, and integrating AV rules into existing traffic codes are crucial.
4.8. Unresolved Challenges and Global Comparisons
While EV platforms offer strong foundations for AD, several issues remain: rare long-tail safety scenarios, multi-region scalability, thermal limits under sustained compute load, public trust gaps, and cybersecurity risk. China’s rapid pilots benefit from state–industry coordination but face trust/liability gaps; the EU emphasizes validation/ethics with slower scaling; the US fosters private innovation but faces regulatory fragmentation. These contrasts show that China’s integrated model accelerates deployment yet must be complemented by robust liability, safety validation, and societal acceptance mechanisms in any region. Although China’s AV strategy demonstrates rapid scaling with strong state–industry coordination, concerns are often raised regarding data governance and surveillance risks given the breadth of environmental and personal data collected by fleets. Moreover, a top-down approach can limit public deliberation on privacy, liability, and social acceptance. Recognizing these issues provides a more balanced view of China’s AV trajectory.
5. Conclusions and Outlook
In light of the technological foundations, systemic enablers, and challenges discussed in the previous sections, Section 5 concludes with synthesized insights and policy recommendations. This study addressed the central research question: how does large-scale electrification influence the architecture, deployment, and safety development of autonomous driving vehicles in China? By analyzing the convergence of high-voltage EV platforms and autonomous systems, this paper demonstrates that electrification is not merely a parallel trend but a structural enabler of autonomy. Specifically, EV-native architectures support continuous sensor operation, fault-tolerant energy redundancy, and seamless over-the-air functionality, thereby creating conditions for safe and scalable autonomy. The originality of this study lies in framing EVs as systemic enablers of autonomy, moving beyond prior literature that treated electrification and autonomy as separate or loosely connected trajectories. The Conceptual Framework for EV–AD Synergy includes: (i) Technical: EV high-voltage, drivetrain simplification, OTA readiness. (ii) Infrastructural: smart grids, 5G-V2X corridors, cloud–edge orchestration. (iii) Policy: sandboxes, standards, insurance/oversight. (iv) Industrial: OEM–startup collaboration, domestic semiconductors, venture capital. The framework captures China’s integrated approach while remaining adaptable internationally.
This paper provides a foundational answer by demonstrating that EV-native systems, through redundant energy capacity, digital over-the-air (OTA) capabilities, and AI-optimized platforms, enable autonomy not merely as a feature but as a system-level transformation. China’s approach exemplifies how technological convergence is amplified when embedded in a coordinated industrial-policy environment.
The implications of this research extend beyond the Chinese context, offering valuable insights for other nations seeking to accelerate the development and deployment of autonomous vehicles. As the automotive industry increasingly embraces electrification, understanding and leveraging the Electric Vehicle–Autonomous Driving synergy will be crucial for achieving truly intelligent and sustainable transportation systems. Moreover, the lessons learned from China’s approach to innovation, particularly its emphasis on cross-sector collaboration and government support, can inform policy decisions and investment strategies in other countries.
Future research should focus on several key areas. First, further investigation is needed to quantify the economic and environmental benefits of the Electric Vehicle–Autonomous Driving synergy, providing policymakers with concrete data to support investment decisions. Second, more research is required to address the ethical and societal implications of autonomous vehicles, ensuring that these technologies are developed and deployed in a responsible and equitable manner. Finally, exploring the potential of emerging technologies such as generative AI and digital twin technology in the advancement of autonomous driving could yield significant breakthroughs. By pursuing these research avenues, we can pave the way for a future where autonomous vehicles contribute to safer, more efficient, and more sustainable transportation systems.
However, despite China’s leading technological advancements, the widespread adoption of autonomous driving faces non-technical barriers, most notably, public trust, interest, and willingness to use autonomous driving features remain relatively low. This hesitation has been exacerbated by high-profile incidents, such as the Xiaomi autonomous vehicle test failure, which received significant media attention and contributed to consumer anxiety. Studies show that negative media narratives can amplify perceived risk, elevate emotional resistance, and reduce the intention to adopt autonomous driving technologies [86]. Moreover, behavioral reasoning theory suggests that Chinese consumers weigh societal and personal control concerns when deciding whether to accept AVs [87]. Additionally, uncertainty over legal liability in AV related accidents, especially those involving higher-level autonomy, has a suppressive effect on purchasing intent and perceived safety [88]. Addressing these psychological and social trust issues will be essential for unlocking the full potential of the Electrical Vehicle–Autonomous Driving synergy, not just in China but globally.
To clarify the linkage between the identified challenges and the proposed strategies, Table 4 summarizes the problem–solution mapping that emerges from this study. It provides a structured overview of how technological, commercial, social, and governance issues can be systematically addressed through targeted measures.
Table 4.
Problem–solution mapping.
Based on the systemic analysis presented in this paper, several guidelines are proposed for China’s intelligent transportation ecosystem strategy:
- (1)
- Standardization and Interoperability—Establish unified standards for EV–AD integration, ensuring cross-OEM compatibility of sensors, V2X communication, and safety validation protocols.
- (2)
- Infrastructure Enhancement—Accelerate the rollout of 5G-V2X corridors, edge-computing roadside units, and smart charging grids to support real-time autonomous operations.
- (3)
- Public–Private Collaboration—Expand joint innovation platforms where OEMs, startups, and state-owned enterprises co-develop hardware–software stacks and share pilot results.
- (4)
- Societal Trust and Acceptance—Launch national-scale public engagement programs, including eHMI-equipped pilot fleets and transparent AV safety dashboards, to increase consumer confidence.
- (5)
- Ethical and Data Governance—Develop clear guidelines for algorithmic decision-making and citizen data protection to align technical deployment with social values and regulatory compliance.
The findings underscore that China’s public–private innovation ecosystem amplifies this convergence, positioning the nation to play a leading role in the next wave of intelligent mobility. Future research should further quantify the economic and societal benefits of this synergy while addressing ethical, regulatory, and trust-related barriers to deployment.
Many findings are China-specific, shaped by policy and industrial ecosystems. Still, three lessons generalize the findings, as follows: (i) EV architectures enable dependable AD power and thermal foundations; (ii) infrastructure (5G-V2X, cloud–edge) underpins real-time autonomy; (iii) startup–OEM integration accelerates scaling. The EU prioritizes regulatory harmonization and ethics, and the US emphasizes market-driven pilots; both face similar questions of robustness and trust. Insights from China require local adaptation elsewhere.
Author Contributions
Conceptualization, J.G. and Y.Q.; methodology, J.G.; formal analysis, J.G.; investigation, J.G.; resources, J.G. and Y. Q.; data curation, Z. C.; writing—original draft preparation, J.G.; writing—review and editing, J.G. and Z.C.; visualization, J.G.; supervision, J.G. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations List (Alphabetical Order)
| ACC | Adaptive Cruise Control |
| AD | Autonomous Driving |
| ADAS | Advanced Driver Assistance Systems |
| AGV | Automated Guided Vehicle |
| AI | Artificial Intelligence |
| ASIL-D | Automotive Safety Integrity Level D |
| AV | Autonomous Vehicle |
| AEV | Autonomous Electric Vehicle |
| BAIC | Beijing Automotive Industry Holding Co., Ltd. |
| BMS | Battery Management System |
| BEV | Battery Electric Vehicle |
| CATARC | China Automotive Technology and Research Center |
| CCID | China Center for Information Industry Development |
| C-V2X | Cellular Vehicle-to-Everything |
| CNN | Convolutional Neural Network |
| CPU | Central Processing Unit |
| DC-DC | Direct Current to Direct Current Converter |
| ECU | Electronic Control Unit |
| eHMI | External Human Machine Interface |
| EV | Electric Vehicle |
| GAC | Guangzhou Automobile Group |
| GPU | Graphics Processing Unit |
| HD Map | High Definition Map |
| HEV | Hybrid Electric Vehicle |
| HVAC | Heating, Ventilation, and Air Conditioning |
| ICE | Internal Combustion Engine |
| ISP | Image Signal Processor |
| ITS | Intelligent Transportation Systems |
| IoT | Internet of Things |
| L2/L3/L4 | Level 2/3/4 Autonomy (SAE Standard) |
| Lidar | Light Detection and Ranging |
| MCU | Motor Control Unit |
| MMIC | Monolithic Microwave Integrated Circuit |
| MOT | Ministry of Transport |
| MIIT | Ministry of Industry and Information Technology |
| NPU | Neural Processing Unit |
| OEM | Original Equipment Manufacturer |
| OTA | Over-the-Air |
| R&D | Research and Development |
| RL | Reinforcement Learning |
| RSU | Roadside Unit |
| SAE | Society of Automotive Engineers |
| SAIC | Shanghai Automotive Industry Corporation |
| SDV | Software-Defined Vehicle |
| SoC | System on Chip |
| SOE | State-Owned Enterprise |
| T-Box | Telematics Box |
| TOPS | Tera Operations Per Second |
| V2G | Vehicle-to-Grid |
| V2I | Vehicle-to-Infrastructure |
| V2X | Vehicle-to-Everything |
| RNN | Recurrent Neural Network |
References
- Li, Q. Dynamic and Precise Engineering Surveying; Ch. Dynamic Surveying in Autonomous Driving; Springer Nature: Singapore, 2023; pp. 165–227. [Google Scholar] [CrossRef]
- Gao, X.; Bian, X. Autonomous Driving of Vehicles Based on Artificial Intelligence. J. Intell. Fuzzy Syst. 2021, 40, 123–135. [Google Scholar] [CrossRef]
- Vermesan, O.; John, R.; Pype, P.; Daalderop, G. Automotive intelligence embedded in electric connected autonomous and shared vehicles technology for sustainable green mobility. Front. Future Transp. 2021, 2, 688482. [Google Scholar] [CrossRef]
- Chougule, A.; Chamola, V.; Sam, A.; Yu, F.R.; Sikdar, B. A Comprehensive Review on Limitations of Autonomous Driving and Its Impact on Accidents and Collisions. IEEE Open J. Veh. Technol. 2024, 5, 142–161. [Google Scholar] [CrossRef]
- Parekh, D.; Poddar, N.; Rajpurkar, A.; Chahal, M.; Kumar, N.; Joshi, G.P.; Cho, W. A Review on Autonomous Vehicles: Progress, Methods and Challenges. Electronics 2022, 11, 2162. [Google Scholar] [CrossRef]
- Bathla, G.; Bhadane, K.V.; Singh, R.K.; Kumar, R.; Aluvalu, R.; Krishnamurthi, R.; Basheer, S. Autonomous Vehicles and Intelligent Automation: Applications, Challenges, and Opportunities. Mob. Inf. Syst. 2022, 2022, 7632892. [Google Scholar] [CrossRef]
- Mohamed, K.S. Deep Learning for Autonomous Driving. In Deep Learning-Powered Technologies; Springer: Berlin/Heidelberg, Germany, 2023; pp. 59–104. [Google Scholar] [CrossRef]
- Fayyad, J.; Jaradat, M.A.; Gruyer, D.; Najjaran, H. Deep learning sensor fusion for autonomous vehicle perception and localization: A review. Sensors 2020, 20, 4220. [Google Scholar] [CrossRef] [PubMed]
- Yeong, D.J.; Velasco-Hernandez, G.; Barry, J.; Walsh, J. Sensor and sensor fusion technology in autonomous vehicles: A review. Sensors 2021, 21, 2140. [Google Scholar] [CrossRef]
- Vargas, J.; Alsweiss, S.; Toker, O.; Razdan, R.; Santos, J. An overview of autonomous vehicles sensors and their vulnerability to weather conditions. Sensors 2021, 21, 5397. [Google Scholar] [CrossRef] [PubMed]
- Matos, F.; Bernardino, J.; Durães, J.; Cunha, J. A Survey on Sensor Failures in Autonomous Vehicles: Challenges and Solutions. Sensors 2024, 24, 5108. [Google Scholar] [CrossRef]
- Prochowski, L.; Szwajkowski, P.; Ziubiński, M. Research scenarios of autonomous vehicles, the sensors and measurement systems used in experiments. Sensors 2022, 22, 6586. [Google Scholar] [CrossRef]
- Grigorescu, S.; Trasnea, B.; Cocias, T. A survey of deep learning techniques for autonomous driving. J. Field Robot. 2020, 37, 363–383. [Google Scholar] [CrossRef]
- Chen, C.; Seff, A.; Kornhauser, A.; Xiao, J. DeepDriving: Learning affordance for direct perception in autonomous driving. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 2722–2730. [Google Scholar] [CrossRef]
- James, H.H.; Pawel, R.; Saduf, G. Autonomous Vehicles and Robust Decision-Making in Dynamic Environments. Fusion Multidiscip. Res. 2020, 1, 110–121. [Google Scholar] [CrossRef]
- Qian, Y.; Feng, S.; Hu, W.; Wang, W. Obstacle avoidance planning of autonomous vehicles using deep reinforcement learning. Adv. Mech. Eng. 2022, 14, 16878132221139661. [Google Scholar] [CrossRef]
- Garlick, S.; Bradley, A. Real-time optimal trajectory planning for autonomous vehicles and lap time simulation using machine learning. Veh. Syst. Dyn. 2022, 60, 4269–4289. [Google Scholar] [CrossRef]
- Bin Issa, R.; Das, M.; Rahman, M.S.; Barua, M.; Rhaman, M.K. Double deep Q-learning and faster R-CNN-based autonomous vehicle navigation and obstacle avoidance in dynamic environment. Sensors 2021, 21, 1468. [Google Scholar] [CrossRef] [PubMed]
- Konkimalla, S. AI-Based Predictive Maintenance for Electric Vehicles Enhancing Reliability and Performance, November. Int. J. Eng. Comput. Sci. 2024, 11, 25647–25661. [Google Scholar] [CrossRef]
- Wu, B.; Widanage, W.D.; Yang, S.; Liu, X. Battery digital twins: Perspectives on the fusion of models, data and artificial intelligence for smart battery management systems. Energy AI 2020, 1, 100016. [Google Scholar] [CrossRef]
- Cavus, M.; Dissanayake, D.; Bell, M. Next generation of electric vehicles: AI-driven approaches for predictive maintenance and battery management. Energies 2025, 18, 1041. [Google Scholar] [CrossRef]
- Mahale, Y.; Kolhar, S.; More, A.S. A comprehensive review on artificial intelligence driven predictive maintenance in vehicles: Technologies, challenges and future research directions. SN Appl. Sci. 2025, 7, 243. [Google Scholar] [CrossRef]
- Krishnamurthy, V.; Nezafati, K.; Stayton, E. Explainable AI framework for imaging-based predictive maintenance for automotive applications and beyond. J. Data Sci. Anal. 2020, 4, 7. [Google Scholar] [CrossRef]
- Biswas, A.; Wang, H.C. Autonomous vehicles enabled by the integration of IoT, edge intelligence, 5G, and blockchain. Sensors 2023, 23, 1963. [Google Scholar] [CrossRef]
- Hallappanavar, V.L.; Bulla, C.M. Intelligent Autonomous Electric Car. In Handbook of Intelligent Vehicles; Wiley: Hoboken, NJ, USA, 2022; Volume 8. [Google Scholar] [CrossRef]
- Rimal, B.P.; Kong, C.; Poudel, B.; Wang, Y.; Shahi, P. Smart electric vehicle charging in the era of internet of vehicles, emerging trends, and open issues. Energies 2022, 15, 1908. [Google Scholar] [CrossRef]
- Husain, I.; Ozpineci, B.; Islam, M.S. Electric drive technology trends, challenges, and opportunities for future electric vehicles. Proc. IEEE 2021, 109, 1039–1059. [Google Scholar] [CrossRef]
- Boopathi, S. Study on Integrated Neural Networks and Fuzzy Logic Control for Autonomous Electric Vehicles. In Handbook of AI-Driven Vehicle Technologies; Wiley: Hoboken, NJ, USA, 2024. [Google Scholar] [CrossRef]
- Chatzikomis, C.; Sorniotti, A.; Gruber, P. Comparison of path tracking and torque-vectoring controllers for autonomous electric vehicles. IEEE Trans. Intell. Veh. 2018, 3, 559–570. [Google Scholar] [CrossRef]
- Wang, S.; Khan, A. Exploring the factors driving the sustainable consumer intentions for over-the-air updates in electric vehicles. Int. J. Automot. Technol. Manag. 2024, 43, 319–339. [Google Scholar] [CrossRef]
- Tekkesinoglu, S.; Habibovic, A.; Kunze, L. Advancing explainable autonomous vehicle systems: A comprehensive review and research roadmap. ACM Digit. Libr. 2025, 14, 1–46. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, L. Safety of Autonomous Vehicles. J. Adv. Transp. 2020, 2020, 8867757. [Google Scholar] [CrossRef]
- Aravind, R.; Surabhi, M.D.; Shah, C.V. AI-Enabled Unified Diagnostic Services: Ensuring Secure and Efficient OTA Updates Over Ethernet/IP. Int. Adv. Res. J. Sci. Eng. Technol. 2023, 10, 129–138. [Google Scholar] [CrossRef]
- Aravind, R.; Surabhi, S.N.D.; Shah, C.V. Remote Vehicle Access: Leveraging Cloud Infrastructure for Secure and Efficient OTA Updates with Advanced AI. Eur. Econ. Lett. 2023, 13, 1309–1319. Available online: https://www.eelet.org.uk/index.php/journal/article/view/1587 (accessed on 30 September 2025).
- Aung, N.; Zhang, W.; Sultan, K.; Dhelim, S. Dynamic traffic congestion pricing and electric vehicle charging management system for the internet of vehicles in smart cities. Digit. Commun. Netw. 2021, 7, 492–504. [Google Scholar] [CrossRef]
- Zhao, H.; Meng, M.; Li, X.; Yu, Q.; Li, L. The development of automated driving in China: A comparison to Germany regarding the government policies, laws and regulations, and industries. Technol. Anal. Strateg. Manag. 2024, 16, 933–941. [Google Scholar] [CrossRef]
- Policy Update. China’s New Energy Vehicle Industrial Development Plan for 2021 to 2035. International Council on Clean Transportation. June 2021. Available online: https://theicct.org/sites/default/files/publications/China-new-vehicle-industrial-dev-plan-jun2021.pdf (accessed on 3 July 2025).
- Atakishiyev, S.; Salameh, M.; Yao, H.; Goebel, R. Explainable artificial intelligence for autonomous driving: A comprehensive overview and field guide for future research directions. IEEE Access 2024, 12, 101603–101625. [Google Scholar] [CrossRef]
- Nikolić, Z. Embedded vision in advanced driver assistance systems. In Advances in Embedded Computer Vision; Springer: Berlin/Heidelberg, Germany, 2014; pp. 45–69. [Google Scholar] [CrossRef]
- Othman, K. Public acceptance and perception of autonomous vehicles: A comprehensive review. AI Ethics 2021, 1, 355–387. [Google Scholar] [CrossRef]
- Cunneen, M.; Mullins, M.; Murphy, F. Autonomous vehicles and avoiding the trolley (dilemma): Vehicle perception, classification, and the challenges of framing decision ethics. AI Soc. 2020, 36, 5–17. [Google Scholar] [CrossRef]
- Kuznietsov, A.; Gyevnar, B.; Wang, C. Explainable AI for safe and trustworthy autonomous driving: A systematic review. IEEE Trans. Intell. Transp. Syst. 2024, 25, 19342–19364. [Google Scholar] [CrossRef]
- Alauthman, M.; Alkasassbeh, M.S.; Alateef, S.; Al-Qerem, A.; Almomani, A. Automotive and Autonomous Vehicle Cybersecurity. In Complexities and Challenges for Securing Digital Assets and Infrastructure; IGI Global Scientific Publishing: Hershey, PA, USA, 2025; pp. 353–376. [Google Scholar] [CrossRef]
- Alqahtani, T. Recent Trends in the Public Acceptance of Autonomous Vehicles: A Review. Smart Cities 2025, 7, 45. [Google Scholar] [CrossRef]
- Bublitz, L.; Herdrich, M. Operation Phase as the Currently Underestimated Phase of the (Safety and Legal) Product Lifecycle of Autonomous Vehicles for SAE L3/L4; SAE Technical Paper; SAE: Warrendale, PA, USA, 2023. [Google Scholar] [CrossRef]
- Jiang, S. Vehicle E/E Architecture and Key Technologies Enabling Software-Defined Vehicle; SAE Technical Paper; SAE: Warrendale, PA, USA, 2024. [Google Scholar] [CrossRef]
- Singh, A.K.; Mishra, A.K.; Gupta, K.K.; Siwakoti, Y.P. High Voltage Gain Bidirectional DC-DC Converters for Supercapacitor Assisted Electric Vehicles: A Review. CPSS Trans. Power Electron. Appl. 2022, 7, 386–398. [Google Scholar] [CrossRef]
- International Organization for Standardization (ISO). Road Vehicles: Environmental Conditions and Testing for Electrical and Electronic Equipment. Part 2: Electrical Loads, 5th ed.; ISO 16750-2:2023; ISO: Geneva, Switzerland, 2023; Available online: https://www.iso.org/standard/76119.html (accessed on 3 July 2025).
- Subke, P.; Moshref, M.; Erber, J. In-vehicle diagnostic system for prognostics and OTA updates of automated/autonomous vehicles. SAE Int. J. Adv. Curr. Pract. Mobil. 2020, 2, 2963–2968. [Google Scholar] [CrossRef]
- Machado, F.A.; Kollmeyer, P.J. Multi-speed gearboxes for battery electric vehicles: Current status and future trends. IEEE Open J. Veh. Technol. 2021, 2, 419–435. [Google Scholar] [CrossRef]
- Fabrizio, F.; Federico, B.; Marco, C.; Gian, L.L.; Eugenio, B. Battery Electric Vehicles: How Many Gears? A Technical–Economic Analysis. Vehicles 2024, 6, 3. [Google Scholar] [CrossRef]
- Rai, S.; De La Parra, C.; Rapp, M. Accelerating Automated Driving and ADAS Using HW/SW Codesign. In Proceedings of the 2024 IEEE 37th International System-on-Chip Conference (SOCC), Dresden, Germany, 16–19 September 2024. [Google Scholar] [CrossRef]
- Cabanes, Q. New Hardware Platform-Based Deep Learning Co-Design Methodology for CPS Prototyping: Objects Recognition in Autonomous Vehicle Case-Study. Ph.D. Thesis, Université Paris-Saclay, Gif-sur-Yvette, France, 2021. Available online: https://theses.hal.science/tel-03287903/ (accessed on 30 September 2025).
- Khelifi, R.; Nini, B.; Berkane, M. Enhanced Classification System for Real-Time Embedded Vision Applications. IEEE Access 2024, 12, 162311–162326. [Google Scholar] [CrossRef]
- Thakur, A.; Mishra, S.K. An in-depth evaluation of deep learning-enabled adaptive approaches for detecting obstacles using sensor-fused data in autonomous vehicles. Eng. Appl. Artif. Intell. 2024, 133, 108550. [Google Scholar] [CrossRef]
- International Energy Agency (IEA). Global EV Outlook 2025: Trends in Electric Car Markets. Int. Energy Agency Rep. 2025, 1–30. Available online: https://www.iea.org/reports/global-ev-outlook-2025/trends-in-electric-car-markets (accessed on 6 July 2025).
- Wang, Y.; Yang, X. The Key Technologies of New Generation Urban Traffic Control System Review and Prospect: Case by China. Appl. Sci. 2025, 15, 7195. [Google Scholar] [CrossRef]
- ITjuzi. 2017–2024 China Autonomous-Driving Investment Overview. Seven Traffic Network. 1 December 2024. Available online: https://data.7its.com/index.php?a=index&aid=64435&c=View&m=home (accessed on 21 August 2025). (In Chinese).
- Jiemian. Autonomous Driving: Listing First, Road Later. 16 April 2021. Available online: https://www.jiemian.com/article/5965254.html (accessed on 21 August 2025). (In Chinese).
- OFweek New Energy Vehicle. A Decade of Autonomous-Driving Financing Data: An Analysis. 16 March 2021. Available online: https://nev.ofweek.com/2021-03/ART-77015-12005-30489601.html (accessed on 21 August 2025). (In Chinese).
- Oliver Wyman. 2025’s Mobility Investment Radar Shows Surge in Funding. Oliver Wyman Insights. February 2025. Available online: https://www.oliverwyman.com/our-expertise/insights/2025/feb/mobility-investment-radar-2025-mobility-trends.html (accessed on 21 August 2025).
- S&P Global Mobility. Mainland China Autonomous Vehicle Development on a Different Track. 10 October 2024. Available online: https://www.spglobal.com/automotive-insights/en/blogs/2024/10/mainland-china-autonomous-vehicle-development-on-a-different-track (accessed on 21 August 2025).
- The Paper. Beijing Accelerates Autonomous-Vehicle Legislation; Qichacha Reports Over 5,000 AV-Related Enterprises in China. 5 July 2024. Available online: https://www.thepaper.cn/newsDetail_forward_27971986 (accessed on 21 August 2025). (In Chinese).
- Zhang, L.; Yuan, E.J. Entrepreneurs in China’s ‘Silicon Valley’: State-led financialization and mass entrepreneurship/innovation. Inf. Commun. Soc. 2023, 26, 286–303. [Google Scholar] [CrossRef]
- Xue, Q.; Xu, M.; Qiao Mullen, C. Governance of Emerging Autonomous Driving Development in China. J. Transp. Res. Board 2020, 2674, 281–290. [Google Scholar] [CrossRef]
- WeRide Debuts First Fare-Charging Level-4 Robobus Service in the Heart of Guangzhou. WeRide.ai. 2025. Available online: https://weride.ai/press (accessed on 6 July 2025).
- Hou, Y. EV Industrial Integration in the 2020s: Case of Chinese Brands NIO, XPeng, and Li Auto. In Exploring the Financial Landscape in the Digital Age; Taylor & Francis: Abingdon, UK, 2024; pp. 870–883. [Google Scholar] [CrossRef]
- Mercedes to Use Momenta Self-Driving Software in 4 Models, Accelerate China Comeback, Report Says. autonews.com. 2 December 2024. Available online: https://www.autonews.com/technology/ane-mercedes-momenta-china-autonomous-driving-software (accessed on 6 July 2025).
- Zheng, D. Horizon Robotics Launches Journey 5 Chip with 128 TOPS of AI Computing Power. Horizon Robotics. 30 July 2021. Available online: https://cnevpost.com/2021/07/30/horizon-robotics-launches-journey-5-chip-with-128-tops-of-ai-computing-power/ (accessed on 6 July 2025).
- China Autonomous Driving Simulation Industry Chain Report 2022, Prnewswire.com. Available online: https://www.prnewswire.com/news-releases/china-autonomous-driving-simulation-industry-chain-report-2022-digital-twin-technology-will-help-to-build-more-extreme-test-scenario-combinations-for-chinese-companies-301763186.html (accessed on 6 July 2025).
- Xiong, H.; Wang, Z.; Wu, G.; Pan, Y. Design and Implementation of Digital Twin-Assisted Simulation Method for Autonomous Vehicle in Car-Following Scenario. J. Sens. 2022, 2022, 4879490. [Google Scholar] [CrossRef]
- Yu, B.; Chen, C.; Tang, J.; Liu, S.; Gaudiot, J.L. Autonomous Vehicles Digital Twin: A Practical Paradigm for Autonomous Driving System Development. Computer 2022, 55, 26–34. [Google Scholar] [CrossRef]
- Li, T.; Bian, Z.; Lei, H.; Zuo, F.; Yang, Y.; Zhu, Q.; Li, Z.; Chen, Z.; Ozbay, K. Digital Twin-based Driver Risk-Aware Intelligent Mobility Analytics for Urban Transportation Management. arXiv 2024, arXiv:2407.15025. [Google Scholar]
- Raju, V. Performance of Open Autonomous Vehicle Platforms: Autoware and Apollo. In Proceedings of the 2019 IEEE 5th International Conference for Convergence in Technology (I2CT), Bombay, India, 29–31 March 2019. [Google Scholar] [CrossRef]
- Zhang, P. Nio Puts 10 V2G Charging Stations into Operation in Shanghai, 2024. cnevpost.com. Available online: https://cnevpost.com/2024/01/09/nio-puts-10-v2g-charging-stations-into-operation-shanghai (accessed on 6 July 2025).
- Feng, Z.; Xue, R.; Yuan, L.; Yu, Y.; Ding, N.; Liu, M. Multi-agent embodied AI: Advances and future directions. arXiv 2025, arXiv:2505.05108. [Google Scholar] [CrossRef]
- Zhang, R.; Hou, J.; Walter, F.; Gu, S.; Guan, J. Multi-agent reinforcement learning for autonomous driving: A survey. arXiv 2024, arXiv:2408.09675. [Google Scholar] [CrossRef]
- Agnihotri, A.; O’Kelly, M.; Mangharam, R. Teaching autonomous systems at 1/10th-scale: Design of the f1/10 racecar, simulators and curriculum. In Proceedings of the 51st ACM Technical Symposium on Computer Science Education, Portland, OR, USA, 11–14 March 2020. [Google Scholar] [CrossRef]
- Xianga, Y.; Wua, Y.; Songb, J.; Gongc, Y.; Lianga, P. Generative AI in Industrial Revolution: A Comprehensive Research on Transformations, Challenges, and Future Directions. J. Knowl. Learn. Sci. Technol. 2024, 3, 11–20. Available online: https://pdfs.semanticscholar.org/3bcc/2c5c30b58aed156361d963806c2bf7367947.pdf (accessed on 30 September 2025).
- Zehtabchi, M. Measuring Innovation in the Autonomous Vehicle Technology: Economic Research Working Paper No. 60. WIPO. World In-tellectual Property Org. Nov. 2019. Available online: https://tind.wipo.int/record/40562/files/wipo_pub_econstat_wp_60.pdf (accessed on 30 September 2025).
- Xu, C.; Sankar, R. A Comprehensive Review of Autonomous Driving Algorithms: Tackling Adverse Weather Conditions, Unpredictable Traffic Violations, Blind Spot Monitoring. Algorithms 2024, 17, 526. [Google Scholar] [CrossRef]
- Wu, Z. Chinese Self-Driving Startup Haomo.AI Confirms Layoffs, Global.com. 25 November 2024. Available online: https://www.yicaiglobal.com/news/chinese-self-driving-tech-startup-haomoai-confirms-layoffs (accessed on 6 July 2025).
- Liu, Y.; Lyu, Y.; Böttcher, K.; Rötting, M. External interface-based autonomous vehicle-to-pedestrian communication in urban traffic: Communication needs and design considerations. Int. J. Hum.-Comput. Stud. 2020, 36, 1258–1272. Available online: https://www.tandfonline.com/doi/full/10.1080/10447318.2020.1736891 (accessed on 30 September 2025). [CrossRef]
- Li, X.; Dong, C.; Chen, X.; Hou, Y.; Yang, W. Effect of eHMI-equipped Automated Vehicles on Pedestrian Crossing Behavior and Safety: A Focus on Blind Spot Scenarios. Accid. Anal. Prev. 2025, 212, 107915. [Google Scholar] [CrossRef]
- Taeihagh, A.; Lim, H.S.M. Algorithmic Decision-Making in AVs: Understanding Ethical and Technical Concerns for Smart Cities. Sustainability 2019, 11, 5791. [Google Scholar] [CrossRef]
- Zhu, G.; Zheng, J.; Du, H.; Hou, J. Insights into Autonomous Vehicles Aversion: Unveiling the Ripple Effect of Negative Media on Perceived Risk, Anxiety, and Negative WOM. Int. J. Human.-Comput. Interact. 2024, 41, 8684–8701. [Google Scholar] [CrossRef]
- Huang, Y.; Qian, L. Understanding the potential adoption of autonomous vehicles in China: The perspective of behavioral reasoning theory. Psychol. Mark. 2021, 38, 669–690. [Google Scholar] [CrossRef]
- Paschalidis, E.; Zhai, S.; Guo, J.; Wei, T.; Liu, P. The Twofold Role of Legal Liability Misattribution on Intention to Buy Automated Vehicles: A Survey in China. Int. J. Hum.-Comput. Interact. 2023, 40, 4288–4299. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Published by MDPI on behalf of the World Electric Vehicle Association. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).