1. Introduction
Distributed-drive intelligent electric vehicles, which utilize hub motors and wheel-side motors as their primary drive units, offer notable advantages in terms of chassis design and integrated control. However, the uncertainties in road adhesion coefficients and the nonlinear coupling behaviors of tires present significant challenges in controller design [
1,
2]. In response to the increasing demand for active safety control in modern vehicles, driving state estimation using low-cost sensors has emerged as a critical foundation for enabling efficient safety management [
3]. Distributed-drive electric vehicles, with their enhanced control flexibility, compactness, and high transmission efficiency, provide robust hardware support for improving handling stability through techniques such as direct yaw moment control (DYC) and traction control systems (TCSs). Recent advancements in active chassis control systems have led to substantial improvements in vehicle stability and safety, particularly under complex driving conditions [
4,
5,
6].
The road adhesion coefficient is a critical parameter in vehicle dynamic control systems, as its accurate estimation is essential for improving vehicle stability, maneuverability, and safety. Existing approaches for estimating this coefficient can be broadly categorized into two groups: experiment-based methods and model-based methods [
7]. Experiment-based methods tend to provide more accurate estimates under conditions of small excitation signals and can even predict the adhesion coefficient before the wheels make contact with the road. However, in real-world applications, the vehicle environment is highly complex, and many high-precision sensors are susceptible to noise and other disturbances. Methods that use image processing or noise analysis to identify the road adhesion coefficient typically require large datasets, resulting in high engineering costs and limiting their practical applicability. Consequently, model-based estimation methods have become the focus of a lot of recent research. These methods use common onboard sensors (e.g., wheel speed sensors, accelerometers) to monitor the vehicle’s motion state and then indirectly estimate the adhesion coefficient by establishing a relationship between the vehicle’s dynamic model and the road adhesion coefficient [
8]. Among these methods, the Kalman filter (KF) and its variants have been widely applied for this purpose [
9]. For example, Wu [
10] of Jilin University proposed an estimation algorithm based on the extended Kalman filter (EKF), which first estimates the vehicle’s driving state parameters and then derives the road adhesion coefficient using the relationship between the vehicle state and road conditions. The EKF is an extension of the KF that is designed for nonlinear systems. It approximates the system’s state transition and observation models by performing a first-order Taylor expansion of the nonlinear functions. While it provides good estimates, its reliance on local linearization of nonlinear systems can lead to a decrease in estimation accuracy in the presence of strong nonlinearities [
11]. To overcome this limitation, Wang et al. [
12] introduced the unscented Kalman filter (UKF), which performs an unbiased transformation using a set of sigma points, avoiding errors from linearization and maintaining high accuracy in complex, nonlinear systems. However, UKF may suffer from loss of statistical properties of the posterior distribution in high-dimensional systems and is prone to issues such as non-positive definiteness, which can cause estimation instability [
13]. To address these challenges, Zhang et al. [
14] proposed a new tire model and improved the accuracy of the adhesion coefficient estimate using an enhanced cubature Kalman filter (CKF). Compared to EKF and UKF, CKF demonstrates superior filtering accuracy, but its performance may still be limited in high-dimensional or noisy systems. To further improve filtering accuracy, Jia et al. [
15] developed the high-order cubature Kalman filter (HCKF) which optimizes the filtering process using a spherical-radial cubature criterion of arbitrary order. While HCKF outperforms other algorithms in many cases, its tracking performance is poor when the system state undergoes sudden changes, which can lead to degraded estimation accuracy or even filter divergence.
CKF is a novel nonlinear Gaussian filtering algorithm proposed by Canadian scholars Arasaratnam et al. in 2009. Unlike traditional methods, it calculates the a posteriori probability density function by determining cubature points, thus avoiding the need to compute the Jacobian matrix. This approach effectively prevents the loss of filtering accuracy in high-dimensional systems. Compared to the EKF and UKF, the CKF offers significant advantages in terms of accuracy, computational efficiency, and adaptability. Furthermore, it is less prone to the linearization errors that are common in other methods, making it particularly suitable for applications in fields such as aviation [
16,
17].
In the domain of vehicle-handling stability control, commonly employed control algorithms include centralized control, hierarchical control, and centralized steering control. Among these, hierarchical control is particularly favored for its flexibility and high control efficiency. Within the hierarchical control framework, the upper level is tasked with calculating the required generalized control forces, while the lower level allocates the torque to each wheel based on the defined control strategy [
18]. Guo et al. [
19] proposed a coordinated control strategy (CCS) that integrates front and rear axle torque distribution with a drive anti-skid function, aiming to improve the overall performance of front and rear independently driven four-wheeled electric vehicles. The strategy combines a torque distribution controller based on economic optimization and an anti-skid controller based on sliding mode control (SMC) theory, but the problems of first-order sliding mode jitter and lack of accuracy are not fully considered. Based on the model predictive control (MPC) algorithm, Yin et al. [
20] proposed a scheme to distribute the output torque of hub motors by optimizing the steering angle of the front wheels and the crossover torque, which improves the path-tracking performance and lateral stability of the vehicle. Tian et al. [
21] developed a seven-degree-of-freedom (7-DOF) vehicle dynamics model and combined a four-wheel steering model with a yaw moment sliding mode controller to design a stability control strategy, significantly improving the vehicle’s trajectory tracking capability. Zhao et al. [
22] proposed a DYC hierarchical control strategy based on the road surface attachment coefficient which effectively prevented the vehicle from destabilization by optimizing the front and rear axle load ratio distribution. Zhang [
23] proposed a second-order sliding mode control (SOSMC) theory which offers advantages over first-order sliding mode control, including reduced chattering, improved robustness, enhanced control accuracy, and better dynamic response. Especially in the case of nonlinear, time-varying, or multi-input multi-output complex systems, SOSMC provides a more precise and stable performance.
In summary, the existing research needs to further improve the accuracy and speed of road adhesion coefficient estimation and explore efficient and stable control strategies. In this paper, a distributed-drive vehicle stability control scheme based on roadway adhesion coefficient estimation and multi-parameter control is proposed. In this scheme, the upper-level calculates the desired yaw rate and sideslip angle based on the 2-DOF vehicle model and estimates the road attachment coefficients by the singular-value optimized CKF algorithm; the middle-level adopts the SOSMC as a direct yaw moment controller, which tracks the desired yaw rate and sideslip angle and controls the torque by the joint distribution algorithm to enhance the system robustness. The lower level is based on the optimal tire loading rate as the target for optimal torque distribution control.
The structure of this paper is as follows:
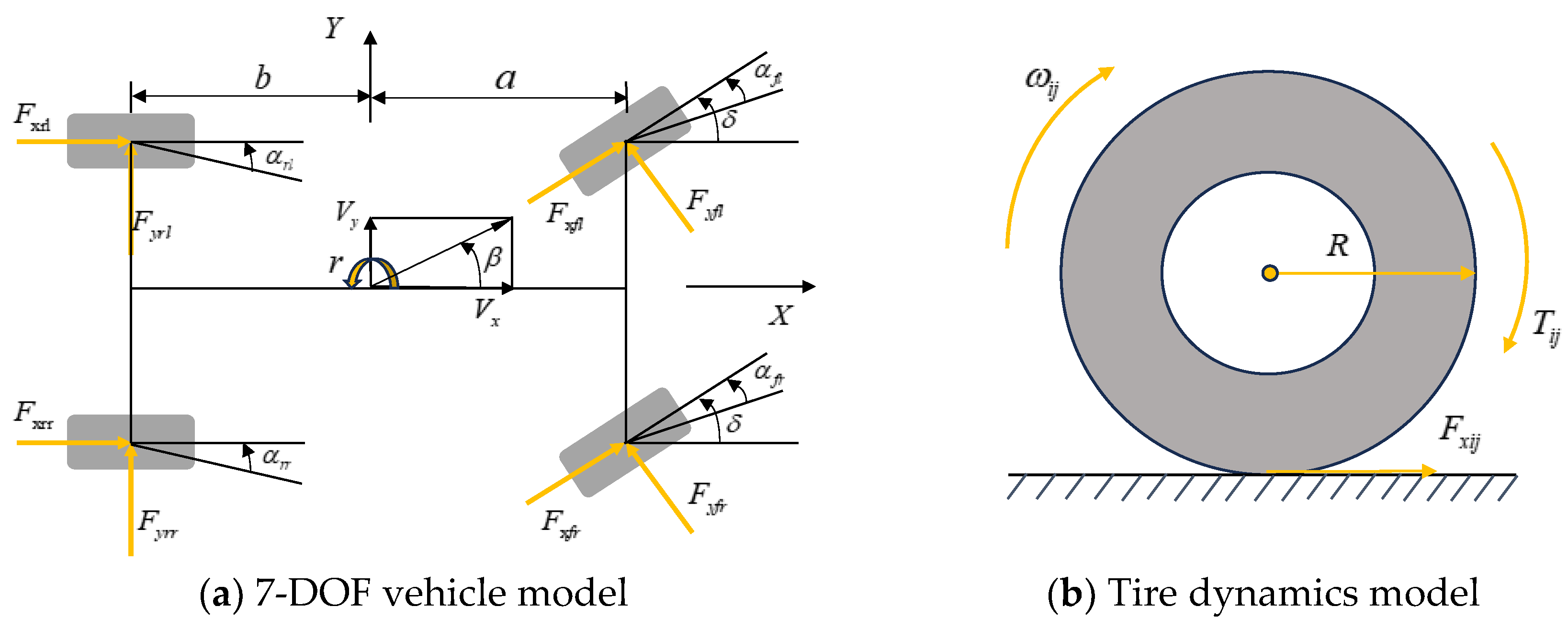
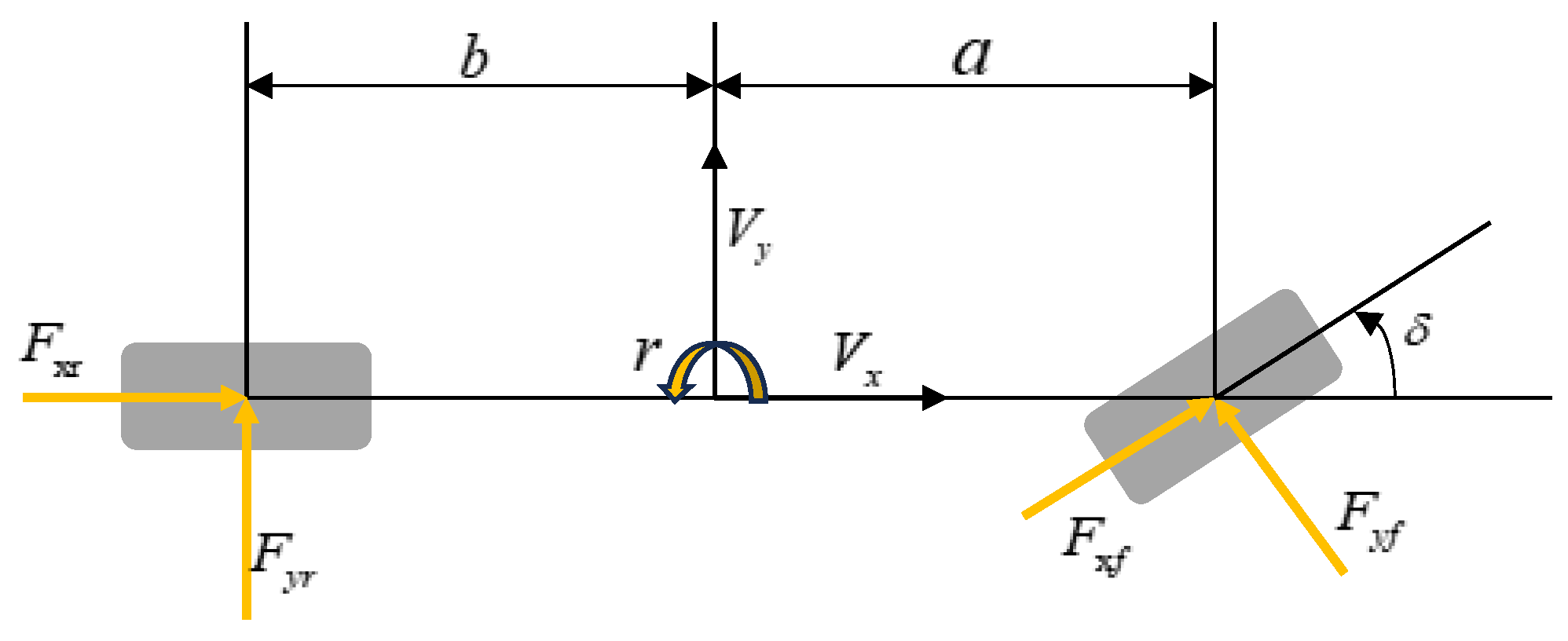
Section 2 presents the 7-DOF and 2-DOF vehicle dynamics models, as well as the tire model, and calculates the desired yaw rate and the sideslip angle.
Section 3 introduces the CKF-based road adhesion coefficient estimator, the second-order sliding mode yaw moment controller, and the optimal torque distribution algorithm.
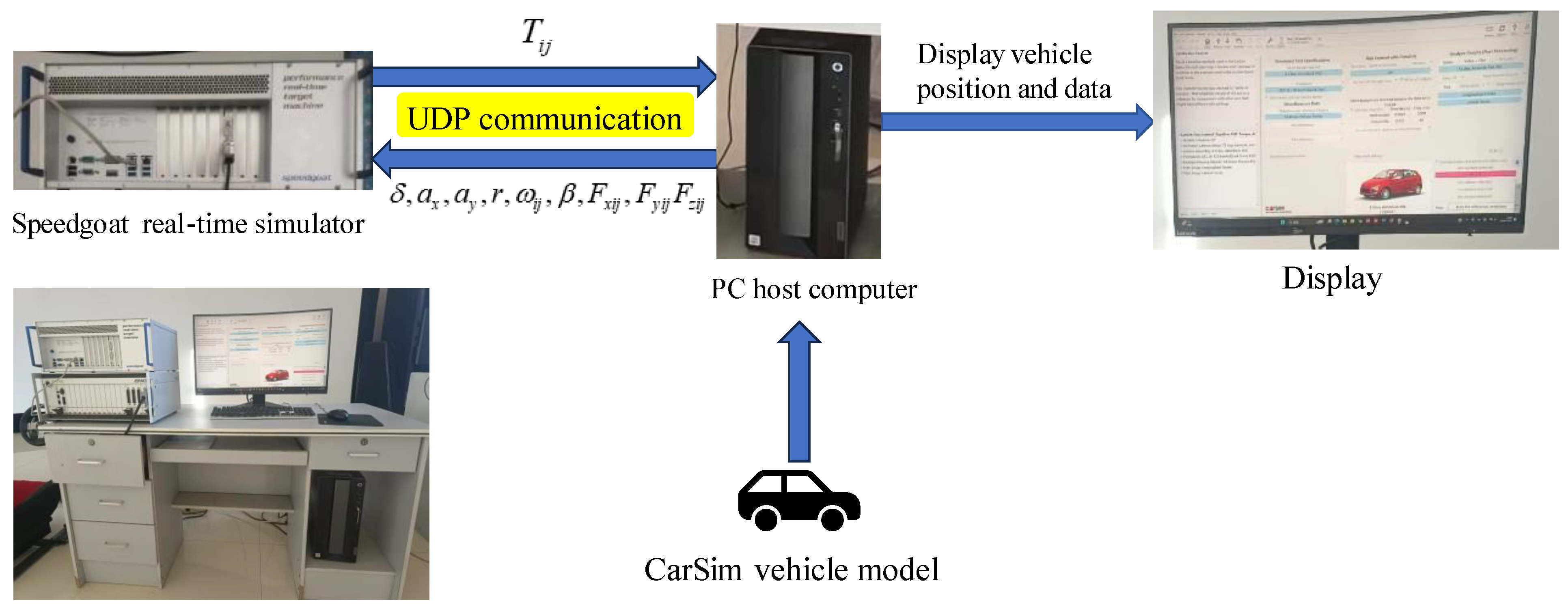
Section 4 discusses the construction of the Speedgoat-CarSim hardware-in-the-loop simulation platform and validates the performance of the control algorithms. Finally,
Section 5 summarizes the research findings of this study.
3. Stability Control Algorithm
In the previous section, the establishment of the vehicle model and the calculation of the desired yaw rate and the desired sideslip angle have been introduced. This section will focus on the design of the roadway adhesion coefficient estimator, the transverse pendulum moment controller and the optimal moment distributor. The functions of each part and the overall algorithm flow are shown in
Figure 3. The vehicle model first outputs the state information of the vehicle, based on which the observation layer performs the computation of the desired yaw rate and the desired sideslip angle, and estimates the road surface attachment coefficient using the improved CKF algorithm. Subsequently, the yaw moment control layer calculates the variable error based on the estimated road surface attachment coefficient and performs tracking control, finally achieving torque allocation for the optimal loading rate of each tire by jointly allocating the driving torque.
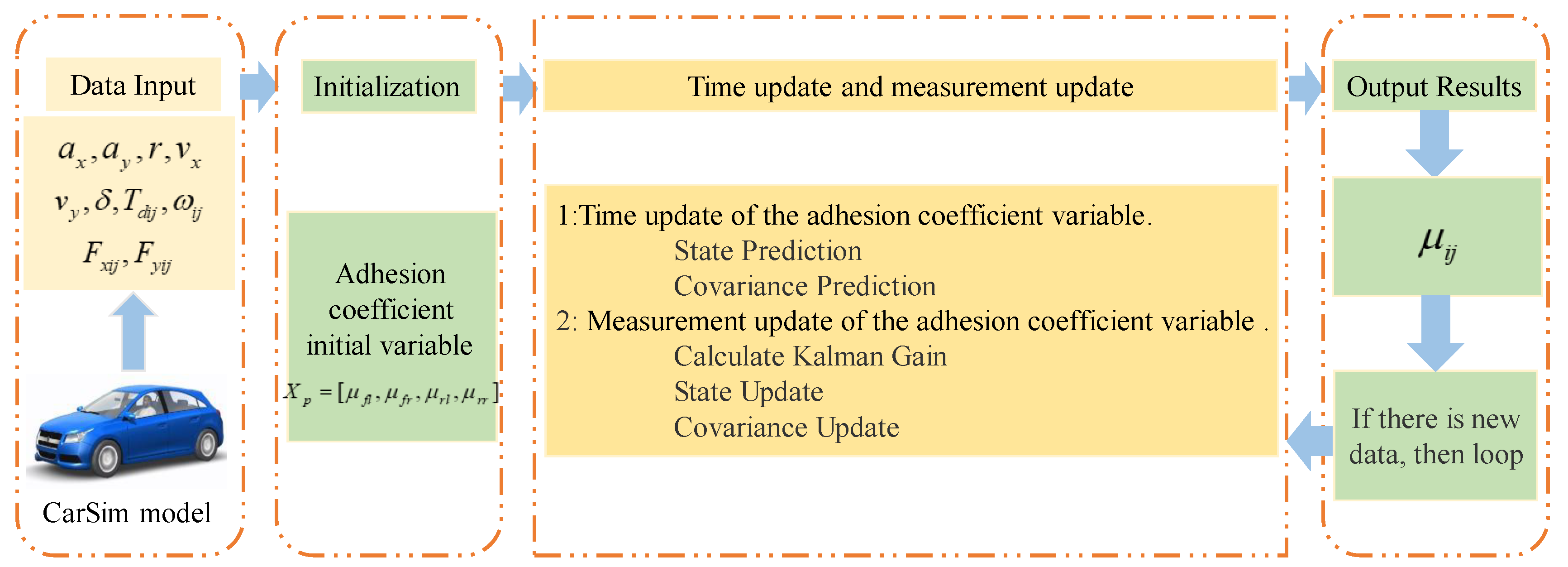
3.1. CKF Road Adhesion Coefficient Estimation Algorithm
In this paper, a CKF algorithm is introduced to improve the stability and accuracy of state estimation based on the standard CKF with singular value decomposition to optimize the error covariance matrix.
Initially, a nonlinear system is formulated using the following state and volume equations:
where the control input
includes the front-wheel angle, the driving forces applied to the four wheels, along with the transverse and longitudinal forces acting on the tires, namely,
, while
represents the adhesion coefficient, which includes the road adhesion coefficient for each wheel, namely,
. In this system, the measured outputs are the longitudinal acceleration, lateral acceleration, and yaw rate, all of which can be easily measured by the sensors, namely,
.
Step 1: Time update of the adhesion coefficient variable
- (1)
The error covariance matrix
is optimized through singular value decomposition.
The columns of
are the unit orthogonal eigenvectors of the error covariance matrix
,
is a diagonal matrix, and
, where
is the eigenvalue of
.
where
is the cubature point,
represents the
j-th element in the cubature point set,
is the total number of cubature points, and
is the state vector. In the adhesion coefficient variable,
, the collection of cubature points is shown below.
- (2)
Cubature point
is calculated as
- (3)
The predicted value of the variable
is derived as
- (4)
The covariance predicted value is obtained as
where
is the process noise covariance.
Step 2: Measurement update of the adhesion coefficient variable
- (1)
The error covariance matrix
is optimized by singular value decomposition.
- (2)
The new cubature point
is derived as
- (3)
The average cubature point
is obtained as
- (4)
The information covariance matrix is given as
where
is the measurement noise covariance.
- (5)
The cross-covariance matrix
is calculated as
- (6)
The gain matrix
is derived as
- (7)
The measured parameter variable
is obtained by
- (8)
The error covariance matrix after measurement
is derived as
The specific algorithm flow is shown in
Figure 4.
3.2. Second-Order Sliding Mode Control Algorithm
The core objective of the transverse yaw moment decision-making is to make the yaw rate follows its desired value as much as possible under the premise of ensuring a small sideslip angle so as to effectively meet the driver’s driving intention. Therefore, based on the 2-DOF vehicle model, this paper selects the transverse pendulum angular velocity and its rate of change and the sideslip angle and its rate of change as the control variables and comprehensively considers the coupling relationship between the two, designing the weighted control module to make decisions on the additional transverse pendulum moments so as to ensure the stability of the vehicle. To this end, the second-order sliding mode control algorithm is used in this section to track the yaw rate and the sideslip angle and calculate the corresponding additional traverse moments. The differential equations of the original 2-DOF model can be rewritten as
where
is the additional pendulum moment.
3.2.1. Yaw Rate Control
When following the yaw rate control, define the yaw rate tracking error and its error rate of change as follows:
The sliding mold surface is defined as
where
is the slip mode variable defined based on the yaw rate and
are the yaw rate deviation coefficient and the yaw rate change rate deviation coefficient. The slip mode of convergence is selected as the exponential convergence law. That is
.
The additional pendulum moment is deduced to be:
3.2.2. Sideslip Angle Control
When controlling based on the sideslip angle, the sideslip angle tracking error and its rate of change are defined as follows:
The sliding mold surface is defined as
where
is the sliding mode variable defined based on the sideslip angle and
are the sideslip angle deviation coefficients and the sideslip angle change rate deviation coefficients. The exponential convergence law is chosen for the sliding mode convergence algorithm, i.e.,
.
The additional pendulum moment is deduced to be
3.3. Joint Distribution Module
At present, there are many methods for determining vehicle instability, and Wang [
25] analyzes and summarizes many methods and gives the vehicle instability criteria. The critical value of destabilization and the boundary parameter of phase plane stability for the deviation of yaw rate and phase plane stability of an ordinary B-type vehicle are shown in
Table 2 and
Table 3.
Which satisfies
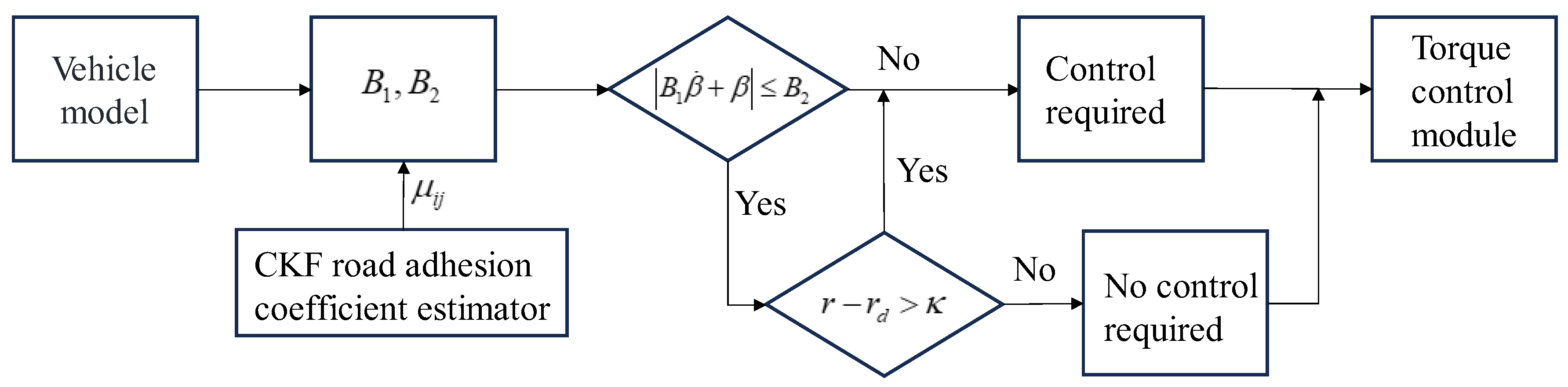
, as the vehicle is stable and controllable. The specific allocation logic is shown in
Figure 5: the vehicle is destabilized by the phase plane stability parameter; if it does not satisfy
, then the vehicle is destabilized and the sideslip angle following control is selected to output the additional transverse moment, and if the vehicle is not destabilized, the joint yaw angular velocity following and sideslip angle following output the additional transverse moment in accordance with a certain allocation ratio.
The specific allocation algorithm is linear and the allocation ratio is given in the following formula:
The joint allocation expression is as follows:
3.4. Optimal Distribution of Torque
In the previous paper, the yaw rate and the sideslip angle are selected as the control parameters and the second-order sliding mode control algorithm is used to regulate them, so as to make the yaw rate follow the desired value; also, the additional yaw moment required to maintain the stability of the vehicle is solved. The task at the lower level is to distribute the calculated additional yaw moment to the four wheels’ hub motors, based on the optimal tire load distribution, to ensure stable vehicle operation. The vehicle is in contact with the ground through the tires, but the tires have a force limit, i.e., increasing the longitudinal force will lead to a decrease in the lateral force. Therefore, the objective of optimal torque distribution in this layer is to reasonably distribute the longitudinal driving force to reduce the loading rate of each tire, thereby ensuring a large lateral force margin for the tires and effectively improving the lateral stability of the vehicle.
The objective function is defined as
Since the drive motor can only control the longitudinal force, this simplifies to
Bringing in
, the final objective function is
The total driving moment
and the additional yaw moment
are related as follows:
The optimization problem designed in this paper has only two equation constraints, but there are four independent variables, and solving it by using the equation constraints brought into the objective function can greatly improve the computational efficiency. As the general vehicle front and rear wheelbase approximation then make
, Equation (47) can be changed t:
Equation (48) is carried into Equation (46) to obtain
Equation (49) takes partial derivatives with respect to
and
:
Let Equation (50) be zero, then the minimum value can be found with
Equation (51) can be substituted into Equation (48) to find .
5. Conclusions
Aiming at the problem of poor maneuvering stability of distributed-drive electric vehicles on high- and low-adhesion road surfaces, this paper proposes a multi-parameter control algorithm based on the estimation of road adhesion coefficients. The specific programs are as follows:
(1) A 7-DOF vehicle dynamics model, as well as a 2-DOF reference model, are established to provide a theoretical basis for the control design.
(2) The higher-level control module calculates the desired yaw rate and sideslip angle based on the 2-DOF vehicle model and estimates the road adhesion coefficient by using the singular-value optimized CKF algorithm. The mid-level control uses a SOSMC as a direct traverse moment controller for tracking the desired yaw rate and sideslip angle. At the same time, the joint distribution algorithm is used for torque distribution in combination with vehicle stability parameters to enhance the robustness of the system. The lower-level control then targets the optimal tire load rate to implement the optimal torque allocation control.
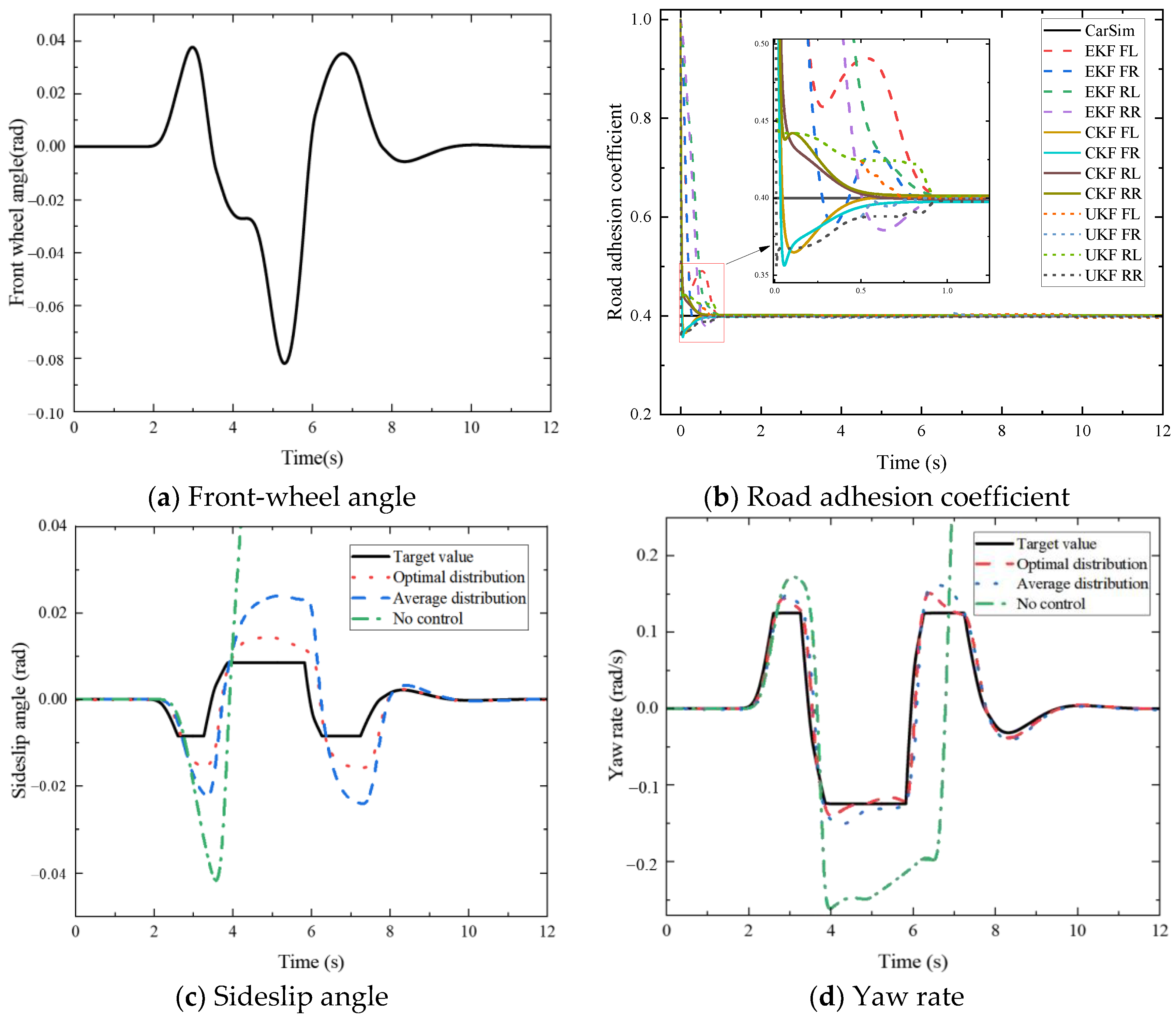
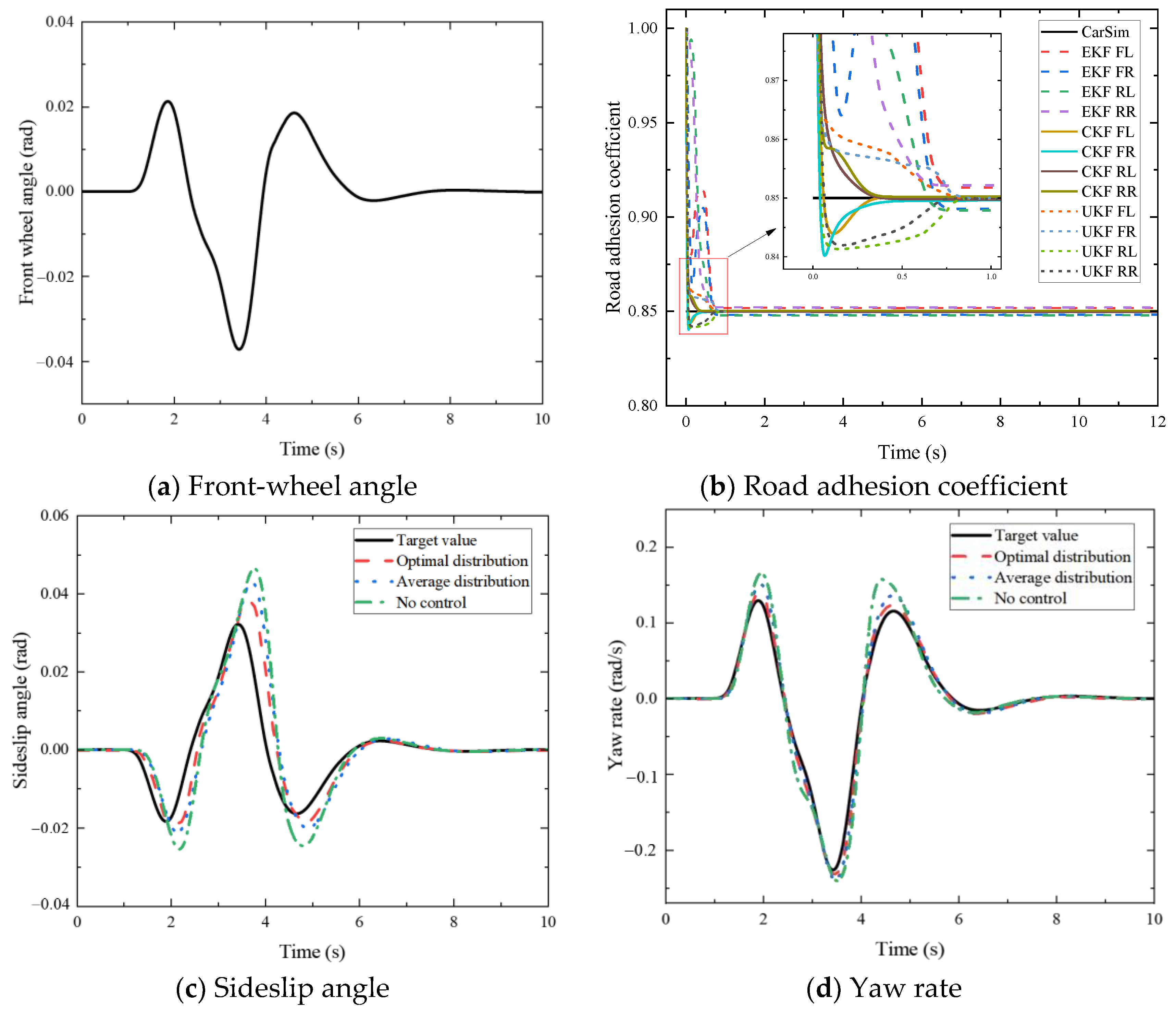
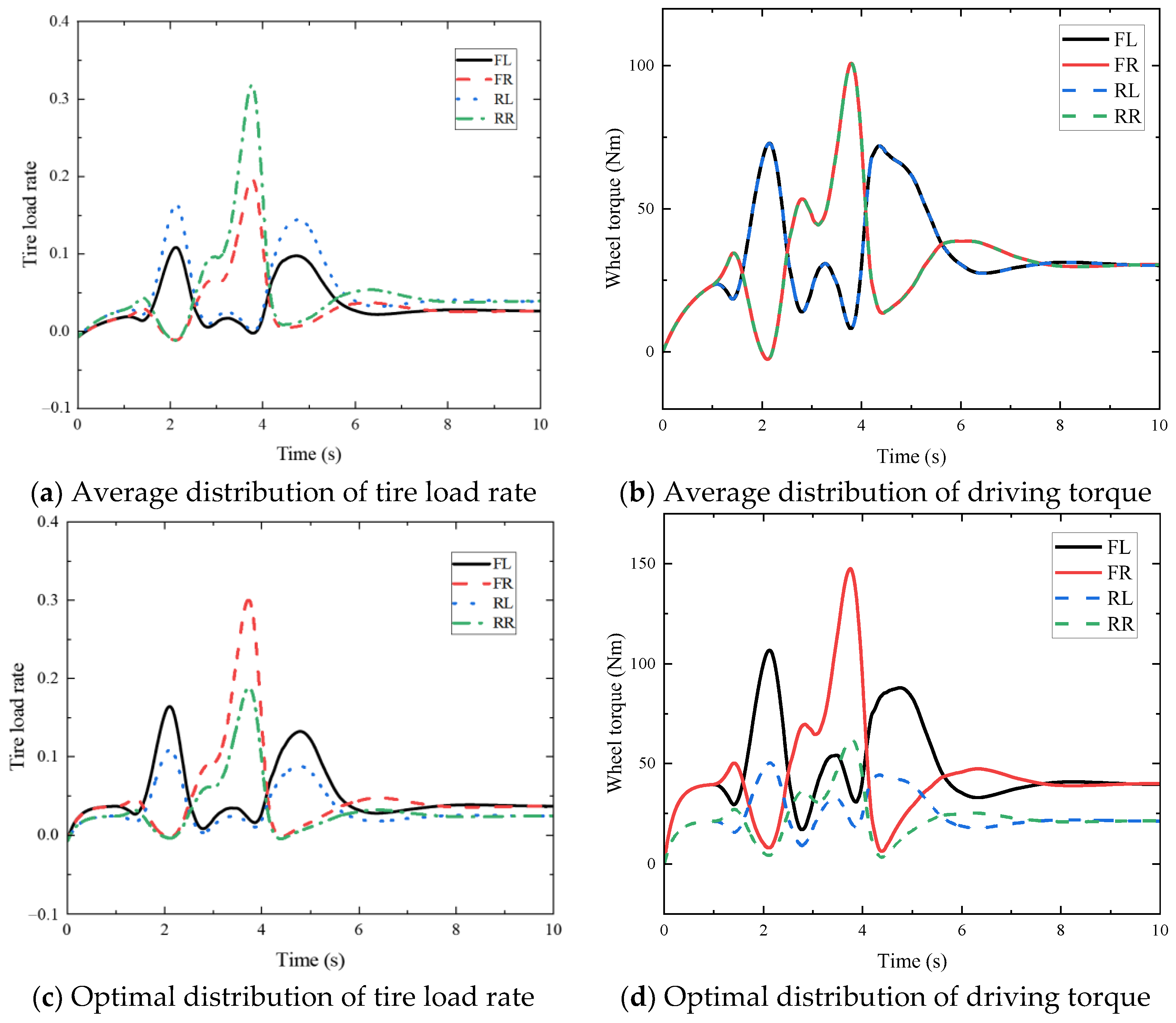
(3) A hardware-in-the-loop simulation platform based on Speedgoat and CarSim is constructed and the stability and accuracy of the proposed control algorithm are verified by setting typical working conditions for testing. The experimental results show that the road adhesion coefficient estimation algorithm can quickly and efficiently estimate the road adhesion coefficient, and its convergence speed is 40% higher than that of the traditional EKF algorithm; additionally, the optimal torque distribution algorithm can reasonably distribute the four-wheel drive force according to the different road adhesion conditions to effectively improve the stability of the vehicle’s maneuvering.
The proposed control method is closely related to vehicle energy efficiency. By accurately estimating the road adhesion coefficient, the system can avoid unnecessary energy waste, particularly on low-traction surfaces or in slip conditions, reducing energy loss caused by excessive driving. The SOSMC helps precisely control the yaw rate, preventing energy waste due to over-correction of the yaw angle. Furthermore, the optimal torque distribution control, based on the optimal tire loading rate, effectively reduces tire slip and energy consumption.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}