
Research Progress and Prospects of Transit Priority Signal Intersection Control Considering Carbon Emissions in a Connected Vehicle Environment


Abstract
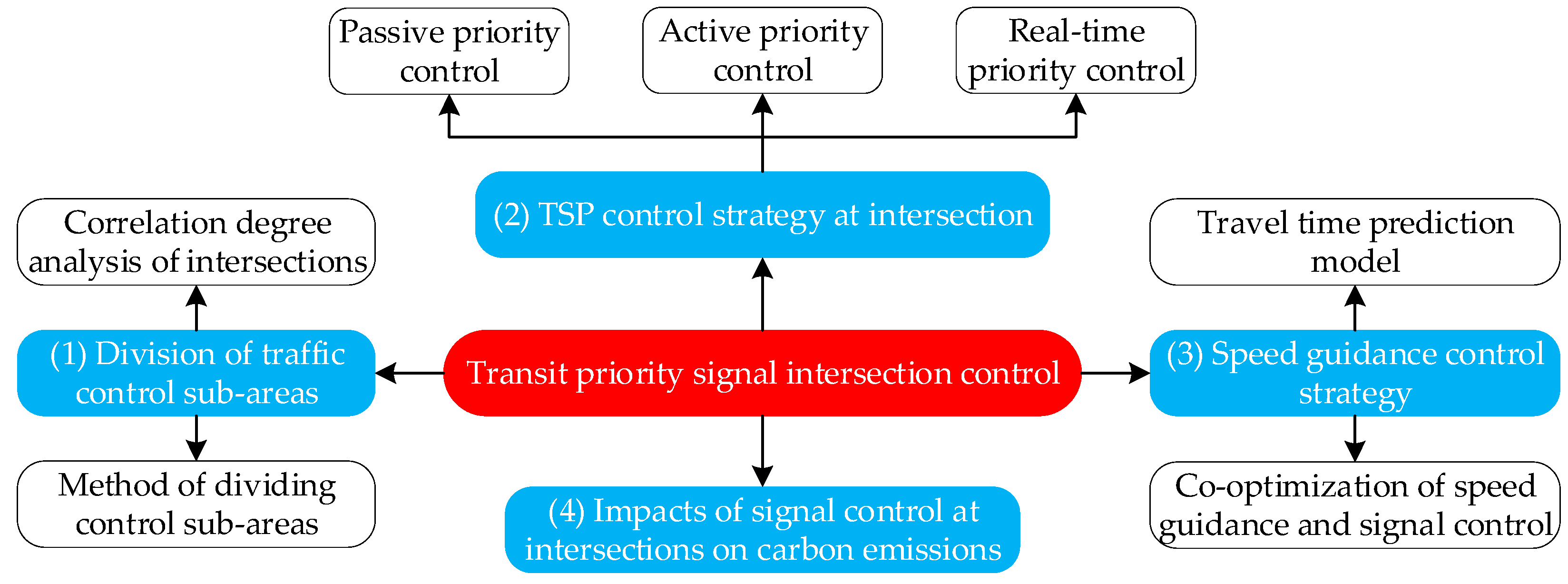
1. Introduction
2. Division of Traffic Control Sub-Areas
2.1. Correlation Degree Analysis of Intersections
2.2. Method of Dividing Control Sub-Areas
2.3. Research Review
- (1)
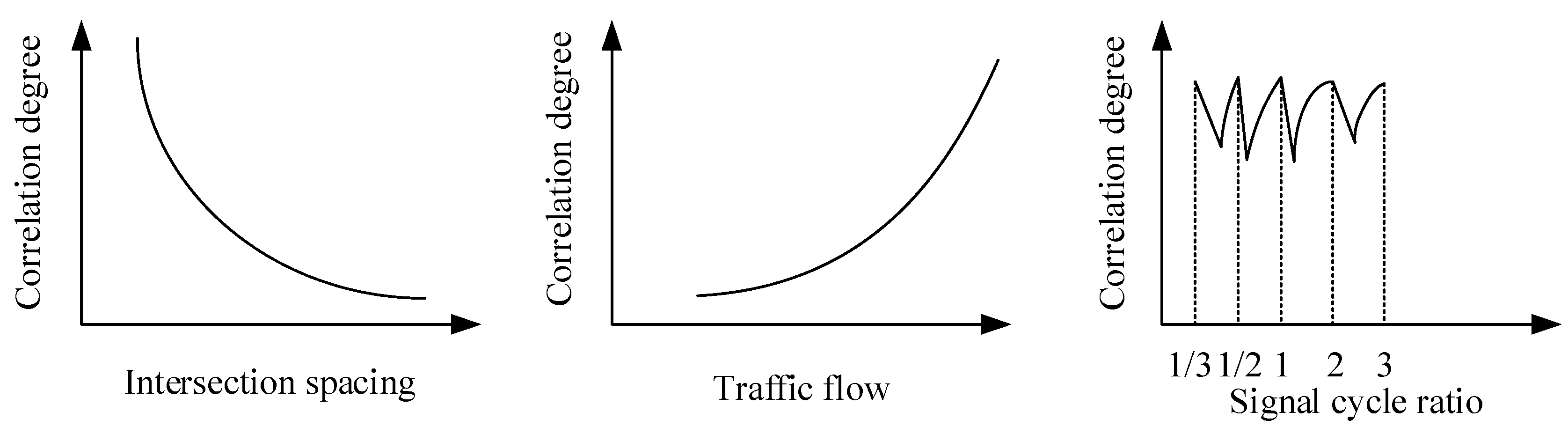
- When analyzing the correlation degree of intersections, most of the existing research established a correlation degree calculation model based on considering the intersection spacing, traffic flow of road sections, signal cycle, and other factors; few researchers considered the overall correlation magnitude between multiple intersections and did not effectively synthesize the various factors affecting the correlation degree of intersections. The indexes were often concentrated on the selection of one or a few kinds of traffic parameters and did not take into account the global characteristics of the road network.
- (2)
- In the traffic control sub-area divisions, most of the existing methods were based on similarities of traffic characteristics, using clustering or search methods to divide high-similarity road sections and intersections into the same sub-areas. For the setting of some model parameters in the sub-area division methods, there was a lack of actual traffic data support, and the sub-area divisions in some of the studies did not reflect the dynamic changes in the modes of traffic operation well.
- (3)
- Most of the studies on traffic control sub-areas focused on the normal traffic state, and there were relatively few studies on the division of sub-areas under the oversaturated traffic state. In the oversaturated traffic state, the vehicle traffic efficiency was low, and the effective traffic control method is extremely important to enhance vehicular traffic efficiency.
3. Transit Signal Priority Control Strategy at the Intersections
3.1. Passive Priority Control
3.2. Active Priority Control
3.3. Real-Time Priority Control
3.4. Research Review
- (1)
- In the research for TSP control strategy in a connected environment, it is common to consider only the case where buses are intelligently connected. With the development of intelligent connected technology, few studies have been able to explore the effects of TSP control strategy on heterogeneous traffic groups when there are both intelligent connected vehicles (ICVs) and human-driven vehicles (HDVs) in the social vehicle fleet.
- (2)
- Most of the existing studies were based on fixed phase sequences or phase combinations for transit priority control without considering the dynamic changes in traffic flow characteristics and lack of flexibility, while in an intelligent network environment, the signal phase sequences and phase lengths can be dynamically adjusted to adapt to changes in traffic demand by obtaining real-time intersection information.
- (3)
- In the existing research on TSP control strategy, most of the studies were conducted under the conditions of exclusive bus lanes, and there was relatively little research on TSP control under non-exclusive bus lanes. Currently, most of the transit priority is focused on improving the efficiency of bus operations, ignoring the problem of impaired rights and interests of social vehicles within the intersection.
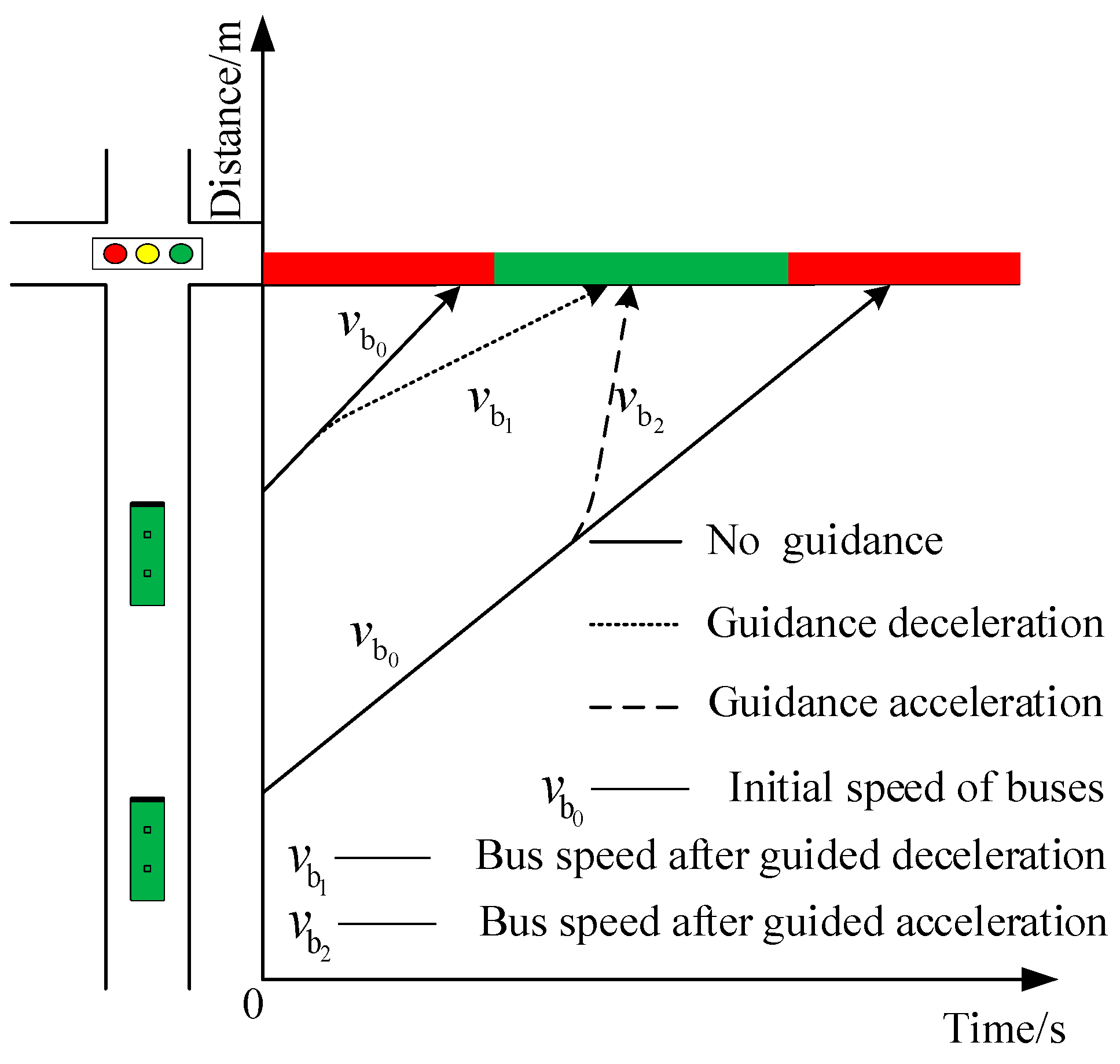
4. Speed Guidance Control Strategy
4.1. Travel Time Prediction Model
4.2. Co-Optimization of Speed Guidance and Signal Control
4.3. Research Review
- (1)
- Bus travel time prediction methods can be generally divided into two kinds: statistical regression and machine learning, in which the prediction effect of machine learning algorithm models was better than that of statistical regression models. However, although the prediction model based on machine learning can better fit the nonlinear and non-stationary time series data in the bus travel time prediction problem, the traditional machine learning algorithm had higher computational complexity and lower prediction efficiency.
- (2)
- Existing studies have generally only explored the prediction of transit arrival times at intersection stop lines based on constant transit speeds under exclusive bus lane conditions. There was insufficient support for the prediction of transit priority duration when the intersection traffic density is high, i.e., under the strong random arrival characteristics of buses.
- (3)
- Existing studies exploring the speed guidance strategy under transit priority control generally only focused on bus speed guidance, and few studies have been able to explore the impact of bus–social vehicle group collaborative guidance strategies on the model optimization objectives under the all-elementary connected environment or mixed-connected environment, with insufficient consideration of the speed guidance and traffic efficiency of the vehicle group.
5. The Impact of Signal Control at Intersections on Carbon Emissions
5.1. Research on the Impact of Signal Control on Carbon Emissions
5.2. Research Review
- (1)
- In the studies on the impacts of intersection signal control on carbon emissions, it was common to take intersection traffic efficiency indicators such as delays, queue lengths, and capacity as the optimization objectives of transit priority control. With the deepening of global attention to greenhouse gas emissions reduction, few studies have been able to explore the impacts of speed guidance and TSP control strategies on intersection vehicle carbon emissions.
- (2)
- For the carbon emissions calculation model of vehicles within the intersection, the existing research generally only investigated two types of vehicles—fuel and pure electric vehicles—without investigating the actual ratio of vehicle mixing at the intersection, and there was a certain deviation between the carbon emissions model calculation results and actual road scenarios.
6. Conclusions and Prospects
6.1. Conclusions
6.2. Prospects
- (1)
- Division of traffic control sub-areas
- (2)
- TSP control strategy at the intersection
- (3)
- Speed guidance control strategy
- (4)
- The impact of signal control at intersections on carbon emissions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Koehler, L.A.; Seman, L.O.; Kraus, W.; Camponogara, E. Real-time integrated holding and priority control strategy for transit systems. IEEE Trans. Intell. Transp. Syst. 2018, 20, 3459–3469. [Google Scholar] [CrossRef]
- Finkelberg, I.; Petrov, T.; Gal-Tzur, A.; Zarkhin, N. The effects of vehicle-to-infrastructure communication reliability on performance of signalized intersection traffic control. IEEE Trans. Intell. Transp. Syst. 2022, 23, 15450–15461. [Google Scholar] [CrossRef]
- Lin, W.; Wei, H. Cyber-physical models for distributed CAV data intelligence in support of self-organized adaptive traffic signal coordination control. Expert Syst. Appl. 2023, 224, 120035. [Google Scholar] [CrossRef]
- Wu, J.; Hounsell, N. Bus priority using pre-signals. Transp. Res. Part A Policy Pract. 1998, 32, 563–583. [Google Scholar] [CrossRef]
- Xu, H.; Sun, J.; Zheng, M. Comparative analysis of unconditional and conditional priority for use at isolated signalized intersections. J. Transp. Eng. 2010, 136, 1092–1103. [Google Scholar] [CrossRef]
- Xue, D.; Yang, N.; Zhao, X.; Wang, Z. Point-cloud map update for connected and autonomous vehicles based on vehicle infrastructure cooperation: Framework and field experiments. In Proceedings of the 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–22 September 2021; pp. 2062–2067. [Google Scholar]
- Behbahani, H.; Poorjafari, M. Proposing a kinematic wave-based adaptive transit signal priority control using genetic algorithm. IET Intell. Transp. Syst. 2023, 17, 912–928. [Google Scholar] [CrossRef]
- Tian, Z.; Urbanik, T. System partition technique to improve signal coordination and traffic progression. J. Transp. Eng. 2007, 133, 119–128. [Google Scholar] [CrossRef]
- Lu, K.; Xu, J.M.; Li, Y.S. Division method of coordinated control subareas based on correlation degree analysis. J. S. China Univ. Technol. (Nat. Sci. Ed.) 2009, 37, 6–9. [Google Scholar]
- Bie, Y.; Wang, D.; Wei, Q.; Ma, D. Development of correlation degree model between adjacent signal intersections for subarea partition. In ICCTP 2011: Towards Sustainable Transportation Systems; American Society of Civil Engineers: Reston, VA, USA, 2011; pp. 1170–1180. [Google Scholar]
- Bie, Y.; Wang, L.; Wang, D. Strategy of dynamic traffic control subarea partition in urban road network. China J. Highw. Transp. 2013, 26, 157–168. [Google Scholar]
- Tian, X.; Yu, D.; Zhou, H.; Xing, X.; Wang, S. Dynamic control subdivision based on improved Newman algorithm. J. Zhejiang Univ. (Eng. Sci.) 2019, 53, 950–956. [Google Scholar]
- Ke, S.; Liu, W.; Lu, Z.; Rao, W.; An, C.; Xia, J. Subarea Partition Based on Correlation Analysis with Edge-Elimination Strategy Using Automatic License Plate Recognition Data. Transp. Res. Rec. 2022, 2676, 641–652. [Google Scholar] [CrossRef]
- Ma, Y.Y.; Yang, X.G.; Zeng, Y. Urban traffic signal control network partitioning using spectral method. Syst. Eng.-Eory Pract. 2010, 30, 2290–2296. [Google Scholar]
- Wang, L.; Chen, Z.; Liu, X. Sub control area division optimization of traffic network based on community discovery. J. Transp. Syst. Eng. Inf. Technol. 2012, 12, 164. [Google Scholar]
- Shen, G.J.; Yang, Y.Y. A dynamic signal coordination control method for urban arterial roads and its application. Front. Inf. Technol. Electron. Eng. 2016, 17, 907–918. [Google Scholar] [CrossRef]
- Xu, J.; Yan, X.; Xing, B. Dynamic network partitioning method based on intersections with different degree of saturation. J. Transp. Syst. Eng. Inf. Technol. 2017, 17, 145. [Google Scholar]
- Ambühl, L.; Loder, A.; Zheng, N.; Axhausen, K.W.; Menendez, M. Approximative network partitioning for MFDs from stationary sensor data. Transp. Res. Rec. 2019, 2673, 94–103. [Google Scholar] [CrossRef]
- Ding, H.; Di, Y.; Feng, Z.; Zhang, W.; Zheng, X.; Yang, T. A perimeter control method for a congested urban road network with dynamic and variable ranges. Transp. Res. Part B Methodol. 2022, 155, 160–187. [Google Scholar] [CrossRef]
- Fang, J.; You, Y.; Xu, M.; Wang, J.; Cai, S. Multi-objective traffic signal control using network-wide agent coordinated reinforcement learning. Expert Syst. Appl. 2023, 229, 120535. [Google Scholar] [CrossRef]
- Furth, P.G.; Cesme, B.; Rima, T. Signal priority near major bus terminal: Case study of Ruggles Station, Boston, Massachusetts. Transp. Res. Rec. 2010, 2192, 89–96. [Google Scholar] [CrossRef]
- Wang, D.H.; Yang, X.R.; Li, F. Analysis of the influencing factors of the urban bus priority development strategy. Comput. Commun. 2008, 26, 45–49. [Google Scholar]
- Skabardonis, A. Control strategies for transit priority. Transp. Res. Rec. 2000, 1727, 20–26. [Google Scholar] [CrossRef]
- Baker, R.J.; Collura, J.; Dale, J.J. An Overview of Transit Signal Priority; ITS: Washington, DC, USA, 2004. [Google Scholar]
- Zhang, J.; Li, P.; Ma, Y. Optimal signal timing method of intersections based on bus priority. Am. J. Traffic Transp. Eng. 2018, 3, 1–5. [Google Scholar] [CrossRef]
- Ma, W.; Liu, Y.; Yang, X. A dynamic programming approach for optimal signal priority control upon multiple high-frequency bus requests. J. Intell. Transp. Syst. 2006, 17, 282–293. [Google Scholar] [CrossRef]
- Ma, W.; Yang, X. Transit passive priority control method based on isolated intersection of optimization of time-space. China J. Highw. Transp. 2007, 20, 86–90. [Google Scholar]
- Ma, W.; Yang, X. Efficiency analysis of transit signal priority strategies on isolated intersection. J. Syst. Simul. 2008, 20, 3309–3313. [Google Scholar]
- Ma, W.; Head, K.L.; Feng, Y. Integrated optimization of transit priority operation at isolated intersections: A person-capacity-based approach. Transp. Res. Part C Emerg. Technol. 2014, 40, 49–62. [Google Scholar] [CrossRef]
- Elias, W.J. The Greenback Experiment: Signal Pre-Emption for Express Buses: A Demonstration Project; California Division of Mass Transportation: Sacramento, CA, USA, 1976. [Google Scholar]
- Furth, P.G.; Muller, T.H. Conditional bus priority at signalized intersections: Better service with less traffic disruption. Transp. Res. Rec. 2000, 1731, 23–30. [Google Scholar] [CrossRef]
- Byrne, N.; Koonce, P.; Bertini, R.L.; Pangilinan, C.; Lasky, M. Using hardware-in-the-loop simulation to evaluate signal control strategies for transit signal priority. Transp. Res. Rec. 2005, 1925, 227–234. [Google Scholar] [CrossRef]
- Bie, Y.M.; Wang, D.H.; Song, X.M.; Xing, Y. Conditional bus signal priority strategies considering saturation degree restriction at isolated junction. J. Southwest Jiaotong Univ. 2011, 46, 657–663. [Google Scholar]
- Cesme, B.; Furth, P.G. Self-organizing traffic signals using secondary extension and dynamic coordination. Transp. Res. Part C Emerg. Technol. 2014, 48, 1–15. [Google Scholar] [CrossRef]
- Hu, X.; Long, B.; Zhu, X. Timing optimization for bus priority signalized intersection considering green loss equilibrium. J. Highw. Transp. Res. Dev. 2016, 33, 96–104. [Google Scholar]
- Wolput, B.; Christofa, E.; Tampère, C.M. Optimal cycle-length formulas for intersections with or without transit signal priority. Transp. Res. Rec. 2016, 2558, 78–91. [Google Scholar] [CrossRef]
- Islam, T.; Vu, H.L.; Hoang, N.H.; Cricenti, A. A linear bus rapid transit with transit signal priority formulation. Transp. Res. Part E Logist. Transp. Rev. 2018, 114, 163–184. [Google Scholar] [CrossRef]
- Wunderlich, R.; Liu, C.; Elhanany, I.; Urbanik, T. A novel signal-scheduling algorithm with quality-of-service provisioning for an isolated intersection. IEEE Trans. Intell. Transp. Syst. 2008, 9, 536–547. [Google Scholar] [CrossRef]
- Xu, T.; Barman, S.; Levin, M.W.; Chen, R.; Li, T. Integrating public transit signal priority into max-pressure signal control: Methodology and simulation study on a downtown network. Transp. Res. Part C Emerg. Technol. 2022, 138, 103614. [Google Scholar] [CrossRef]
- Li, C.; Wang, H.; Lu, Y. A multi-path arterial progression model with variable signal structures. Transp. A Transp. Sci. 2023, 19, 2101708. [Google Scholar] [CrossRef]
- Yagar, S. Efficient transit priority at intersections. Transp. Res. Rec. 1993, 1390, 10–15. [Google Scholar]
- Yagar, S.; Han, B. A procedure for real-time signal control that considers transit interference and priority. Transp. Res. Part B Methodol. 1994, 28, 315–331. [Google Scholar] [CrossRef]
- Mirchandani, P.; Knyazyan, A.; Head, L.; Wu, W. An approach towards the integration of bus priority, traffic adaptive signal control, and bus information/scheduling systems. Comput.-Aided Sched. Public Transp. 2001, 505, 319–334. [Google Scholar]
- Dion, F.; Rakha, H.; Zhang, Y. Integration of transit signal priority within adaptive traffic signal control systems. In Proceedings of the 84th Annual Meeting of the Transportation Research Board, Washington, DC, USA, 9–13 January 2005. [Google Scholar]
- Li, M.; Yin, Y.; Zhang, W.B.; Zhou, K.; Nakamura, H. Modeling and implementation of adaptive transit signal priority on actuated control systems. Comput.-Aided Civ. Infrastruct. Eng. 2011, 26, 270–284. [Google Scholar] [CrossRef]
- Li, R.; Jin, P.J. Transit signal priority optimization for urban traffic network considering arterial coordinated signal control. Adv. Mech. Eng. 2017, 9, 1687814017700594. [Google Scholar] [CrossRef]
- Moghimi, B.; Kamga, C.; Zamanipour, M. Look-ahead transit signal priority control with self-organizing logic. J. Transp. Eng. Part A Syst. 2020, 146, 04020045. [Google Scholar] [CrossRef]
- Yin, J.; Li, T.; Sun, J. Transit signal priority based on optional phase optimization framework in connected vehicle environment. J. Tongji Univ. (Nat. Sci.) 2023, 51, 395–404. [Google Scholar]
- Liu, Y.; Wang, Z.; Pan, L. Bus detection and its travel time prediction. China J. Highw. Transp. 2016, 29, 95–104+125. [Google Scholar]
- Behera, R.; Kumar, B.A.; Vanajakshi, L. Real time identification of inputs for a BATP system using data analytics. Int. J. Civ. Eng. 2017, 15, 1173–1185. [Google Scholar] [CrossRef]
- Rahman, M.M.; Wirasinghe, S.C.; Kattan, L. Analysis of bus travel time distributions for varying horizons and real-time applications. Transp. Res. Part C Emerg. Technol. 2018, 86, 453–466. [Google Scholar] [CrossRef]
- Li, H.; Wu, J.; Sun, L. Bus travel time prediction method based on RFID electronic license plate data. China J. Highw. Transp. 2019, 32, 165. [Google Scholar]
- Huang, Y.P.; Chen, C.; Su, Z.C.; Chen, T.S.; Sumalee, A.; Pan, T.L.; Zhong, R.X. Bus arrival time prediction and reliability analysis: An experimental comparison of functional data analysis and Bayesian support vector regression. Appl. Soft Comput. 2021, 111, 107663. [Google Scholar] [CrossRef]
- Tran ND, T.J.; Leung, C.K.; Turner, T.; Wu, S.T.; Karimbaeva, N.; Kim, J.; Cuzzocrea, A. Transportation analytics with fuzzy logic and regression. In Proceedings of the 2022 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), Padua, Italy, 18–23 July 2022; pp. 1–8. [Google Scholar]
- Shan, X.; Wang, C.; Zhou, D. Interfering spatiotemporal features and causes of bus bunching using empirical gps trajectory data. J. Grid Comput. 2023, 21, 15. [Google Scholar] [CrossRef]
- Li, Z.; Elefteriadou, L.; Ranka, S. Signal control optimization for automated vehicles at isolated signalized intersections. Transp. Res. Part C Emerg. Technol. 2014, 49, 1–18. [Google Scholar] [CrossRef]
- Wu, Z.; Tan, G.; Shen, J.; Wang, C. A Schedule-based Strategy of transit signal priority and speed guidance in Connected Vehicle environment. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; pp. 2416–2423. [Google Scholar]
- Feng, Y.; Yu, C.; Liu, H.X. Spatiotemporal intersection control in a connected and automated vehicle environment. Transp. Res. Part C Emerg. Technol. 2018, 89, 364–383. [Google Scholar] [CrossRef]
- Zhang, P.; Wang, P.; Sun, C. BRT Priority Control Method Based on Two Stations at Intersection. J. Transp. Syst. Eng. Inf. Technol. 2020, 20, 83. [Google Scholar]
- Lu, K.; Zhang, J.; Deng, X. Regional Green Wave Coordinated Control Model Based on Cooperative Optimization of Vehicle Speed and Traffic Signal. China J. Highw. Transp. 2021, 34, 31. [Google Scholar]
- Kamal, M.A.S.; Hayakawa, T.; Imura, J.I. Development and evaluation of an adaptive traffic signal control scheme under a mixed-automated traffic scenario. IEEE Trans. Intell. Transp. Syst. 2022, 21, 590–602. [Google Scholar] [CrossRef]
- Hu, X.; Chen, X.; Wang, R. Optimization model of bus priority control considering carbon emissions with stochastic characteristics. J. S. China Univ. Technol. (Nat. Sci. Ed.) 2023, 51, 160–170. [Google Scholar]
- Karekla, X.; Fernandez, R.; Tyler, N. Environmental effect of bus priority measures applied on a road network in Santiago, Chile. Transp. Res. Rec. 2018, 2672, 135–142. [Google Scholar] [CrossRef]
- Kwak, J.; Park, B.; Lee, J. Evaluating the impacts of urban corridor traffic signal optimization on vehicle emissions and fuel consumption. Transp. Plan. Technol. 2019, 35, 145–160. [Google Scholar] [CrossRef]
- Abudayyeh, D.; Nicholson, A.; Ngoduy, D. Traffic signal optimization in disrupted networks, to improve resilience and sustainability. Travel Behav. Soc. 2021, 22, 117–128. [Google Scholar] [CrossRef]
- Kang, L.; Huang, H.; Lu, W.; Liu, L. A Dueling Deep Q-Network method for low-carbon traffic signal control. Appl. Soft Comput. 2023, 141, 110304. [Google Scholar] [CrossRef]
- Hu, X.; Chen, X.; Guo, J.; Dai, G.; Long, B.; Chen, X. Optimization model for bus priority control considering carbon emissions. J. Air Waste Manag. Assoc. 2023, 73, 471–489. [Google Scholar] [CrossRef] [PubMed]
- Hu, X.; Chen, X.; Guo, J.; Dai, G.; Zhao, J.; Long, B.; Chen, S. Optimization model for bus priority control considering carbon emissions under non-bus lane conditions. J. Clean. Prod. 2023, 402, 136747. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Author | Year | Correlation Degree Indicators |
|---|---|---|
| Tian and Urbanik [8] | 2007 | Intersection spacing, road traffic flow, signal cycle ratio |
| Lu et al. [9] | 2009 | Number of vehicles in the queue, number of vehicles in operation, cycle length |
| Bie et al. [10,11] | 2011, 2013 | Cycle length, fleet length |
| Tian et al. [12] | 2019 | Intersection spacing, traffic flow, travel time, discrete characteristics of traffic flow, signal cycle |
| Ke et al. [13] | 2022 | Adjacent intersection flows, signal cycle, roadway density |
| Author | Year | Sub-Area Division Method |
|---|---|---|
| Ma et al. [14] | 2010 | Spectral methods |
| Wang et al. [15] | 2012 | Complex network community discovery algorithms |
| Shen et al. [16] | 2016 | Fuzzy algorithms |
| Xu et al. [17] | 2017 | Spectral graph theory |
| Ambühl et al. [18] | 2019 | Monte Carlo algorithm |
| Ding et al. [19] | 2022 | Road network heterogeneity difference theory |
| Fang et al. [20] | 2023 | Spectral clustering segmentation algorithm |
| Author | Year | Main Methodology |
|---|---|---|
| Furth et al. [21], Ma et al. [22] | 1991, 2014 | Adjustment of cycle length |
| Skabardonis et al. [23] | 2000 | Adjustment of phase sequence |
| Baker et al. [24] | 2004 | Cancel the left turn phase |
| Zhang et al. [25], Ma and Yang. [26,27,28] | 2004, 2007 | Adjustment of green signal ratio |
| Author | Year | Main Methodology |
|---|---|---|
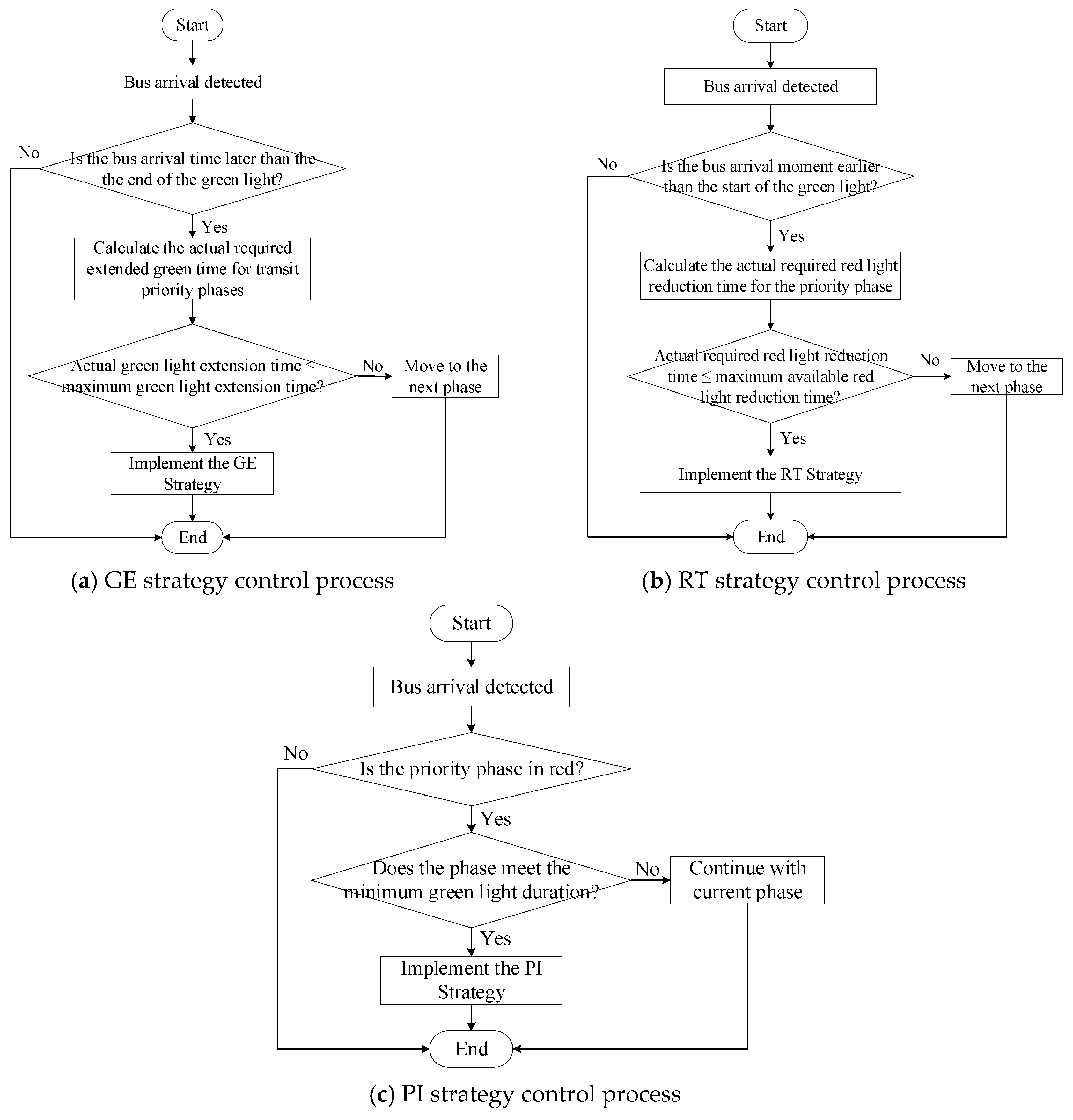
| Furth and Muller [31], Byrne et al. [32], Bei et al. [33], Cesme et al. [34], Hu et al. [35], Wolput et al. [36], Islam et al. [37], Wunderlich et al. [38], Xu et al. [39] | 2000, 2005, 2008, 2011, 2014, 2016, 2016, 2022, 2023 | GE |
| Byrne et al. [32], Bei et al. [33], Hu et al. [35], Islam et al. [37], Wunderlich et al. [38], Xu et al. [39], Xu et al. [40] | 2005, 2008, 2011, 2016, 2018, 2022, 2023 | RT |
| Hu et al. [35], Islam et al. [37], Wunderlich et al. [38] | 2008, 2016, 2018 | PI |
| Author | Year | Main Methodology |
|---|---|---|
| Yagar et al. [41,42], Mirchandani et al. [43], Li et al. [45], Moghimi et al. [47], Yin et al. [48] | 1993, 1994, 2001, 2017, 2020, 2023 | Optimization-based real-time prioritization |
| Dion et al. [44], Li et al. [46] | 2005, 2011 | Rule-based real-time prioritization |
| Situation Classification | Situation Description |
|---|---|
| Direct Passage | The light is green at the moment of vehicle arrival, and the remaining time is sufficient for the bus to pass at its current speed, at a constant speed. |
| Accelerated Passage | The light is green at the moment of vehicle arrival, and the remaining time does not allow the bus to pass, but it can pass by accelerating within the remaining time of the green light. |
| Decelerate to pass | Under normal circumstances, the light is red when the vehicle reaches the stop line, but it is possible to slow down so that the bus reaches the stop line with a green light and thus passes through smoothly. |
| Wait for the next green light | Vehicles are unable to accelerate or decelerate through intersections. |
| Author | Year | Prediction Models |
|---|---|---|
| Liu et al. [49] | 2016 | Adaptive-historical predictive modeling. |
| Behera et al. [50] | 2017 | Adaptive Kalman filter prediction model. |
| Rahman et al. [51] | 2018 | Long- and short-term memory neural network–particle filter prediction modeling. |
| Li et al. [52] | 2019 | Combined prediction model with adaptive asymptotic Kalman filter and wavelet neural network. |
| Huang et al. [53] | 2021 | Fisher discriminant analysis and Bayesian support vector regression predictive modeling. |
| Tran et al. [54] | 2022 | Nonlinear time series regression forecasting model. |
| Shan et al. [55] | 2023 | Combined forecasting models for stochastic time series and Markov chains. |
| Author | Year | Main Points |
|---|---|---|
| Li et al. [56] | 2014 | Traffic signal–vehicle trajectory cooperative optimization in single-intersection scenario. |
| Wu et al. [57] | 2016 | A combined control strategy of speed guidance and TSP in a connected environment is proposed. |
| Feng et al. [58] | 2018 | A two-stage approach for the co-optimization of signal timing and fleet speed is proposed. |
| Zhang et al. [59] | 2020 | BRT speed guidance and signal timing dual compensation correction for deviation between actual BRT departure time and timetable. |
| Lu et al. [60] | 2021 | Aiming at the problem of coordinated control of regional green waves, a cooperative optimization method of ICV green wave speed and signal timing is proposed. |
| Kamal et al. [61] | 2022 | Intersection signal timing and ICV trajectory optimization in ICV–HDV mixed traffic environment. |
| Hu et al. [62] | 2023 | Introducing bus speed probability density function to predict bus priority duration and constructing a bi-level optimization model for single intersection bus priority control. |
| Author | Year | Main Points |
|---|---|---|
| Karekla et al. [63] | 2018 | Studied the impact of TSP strategies on bus energy consumption and carbon emissions under the condition of exclusive bus lanes. |
| Kwak et al. [64] | 2019 | Traffic signal parameter settings can significantly affect vehicle delays and emissions at signal intersections, and optimal traffic signal timing can reduce carbon emissions by 8% to 20%. |
| Abudayyeh et al. [65] | 2021 | There was a relationship between pollutant emissions at intersections and signal timing, and pollutant emissions were not necessarily minimized when intersection capacity was maximized. |
| Kang et al. [66] | 2023 | Carbon emissions were calculated using convolutional neural networks and long- and short-term memory network methods, and it was verified that signal timing has an impact on carbon emissions in the road network. |
| Hu et al. [67,68] | 2023 | An optimization method was proposed for low-carbon control of TSP at intersections with stable arrival characteristics as well as strong stochastic arrival characteristics. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, X.; Hu, X.; Wang, R.; Zhao, J. Research Progress and Prospects of Transit Priority Signal Intersection Control Considering Carbon Emissions in a Connected Vehicle Environment. World Electr. Veh. J. 2024, 15, 135. https://doi.org/10.3390/wevj15040135
Chen X, Hu X, Wang R, Zhao J. Research Progress and Prospects of Transit Priority Signal Intersection Control Considering Carbon Emissions in a Connected Vehicle Environment. World Electric Vehicle Journal. 2024; 15(4):135. https://doi.org/10.3390/wevj15040135
Chicago/Turabian StyleChen, Xinghui, Xinghua Hu, Ran Wang, and Jiahao Zhao. 2024. "Research Progress and Prospects of Transit Priority Signal Intersection Control Considering Carbon Emissions in a Connected Vehicle Environment" World Electric Vehicle Journal 15, no. 4: 135. https://doi.org/10.3390/wevj15040135
APA StyleChen, X., Hu, X., Wang, R., & Zhao, J. (2024). Research Progress and Prospects of Transit Priority Signal Intersection Control Considering Carbon Emissions in a Connected Vehicle Environment. World Electric Vehicle Journal, 15(4), 135. https://doi.org/10.3390/wevj15040135