

Position Estimation Method for Unmanned Tracked Vehicles Based on a Steering Dynamics Model


Abstract
1. Introduction
2. Steering Dynamics Model for Tracked Vehicles
- (1)
- The tracked vehicle does not deform during the turning process, and the position of the center of mass is always located at the geometric center.
- (2)
- In the steering process of the tracked vehicle, the stretching and bulldozing effects of the track are ignored.
- (3)
- The changes in the track force can be obtained from the shear force–displacement model, which can be expressed by Equation (1):
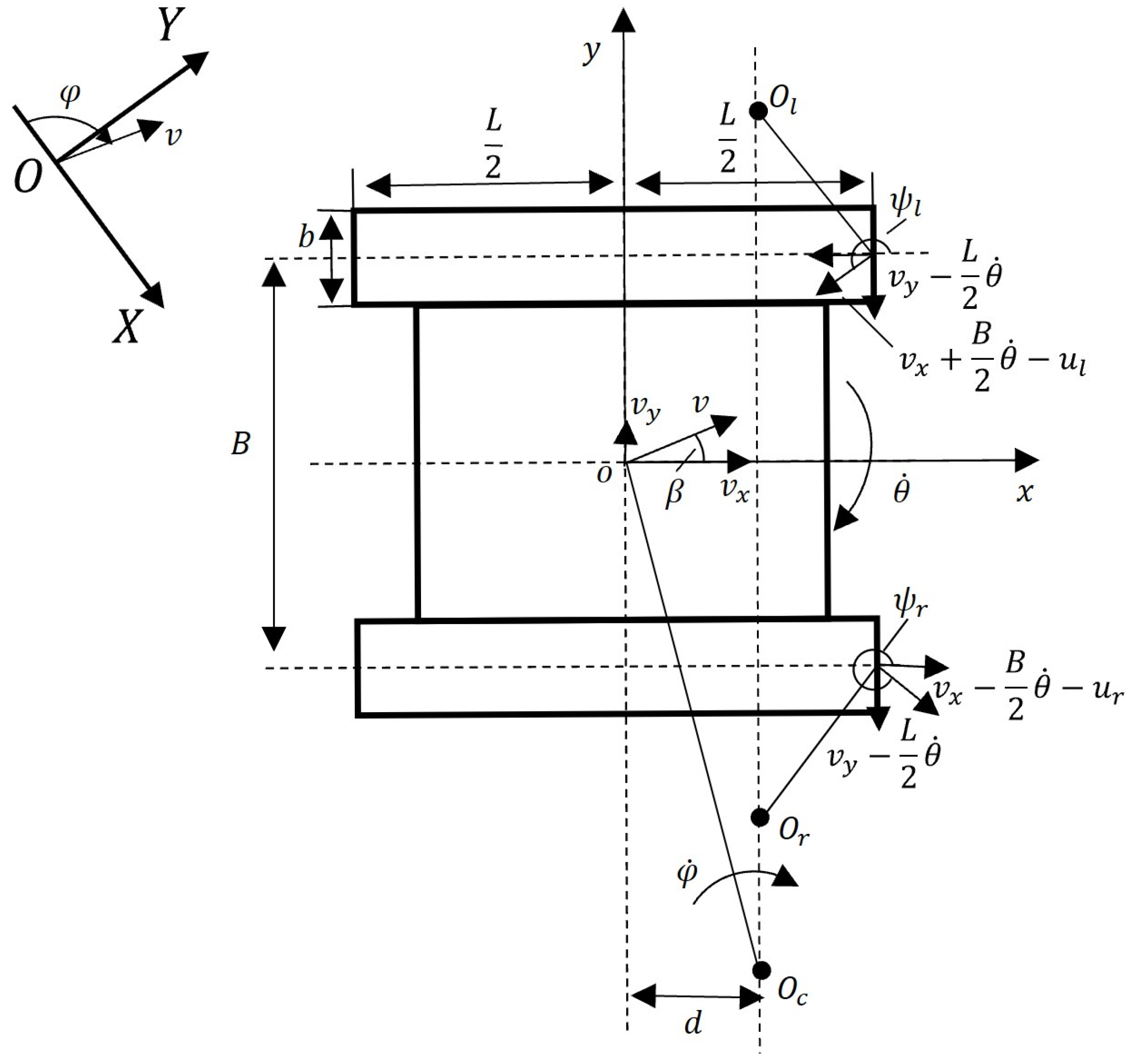
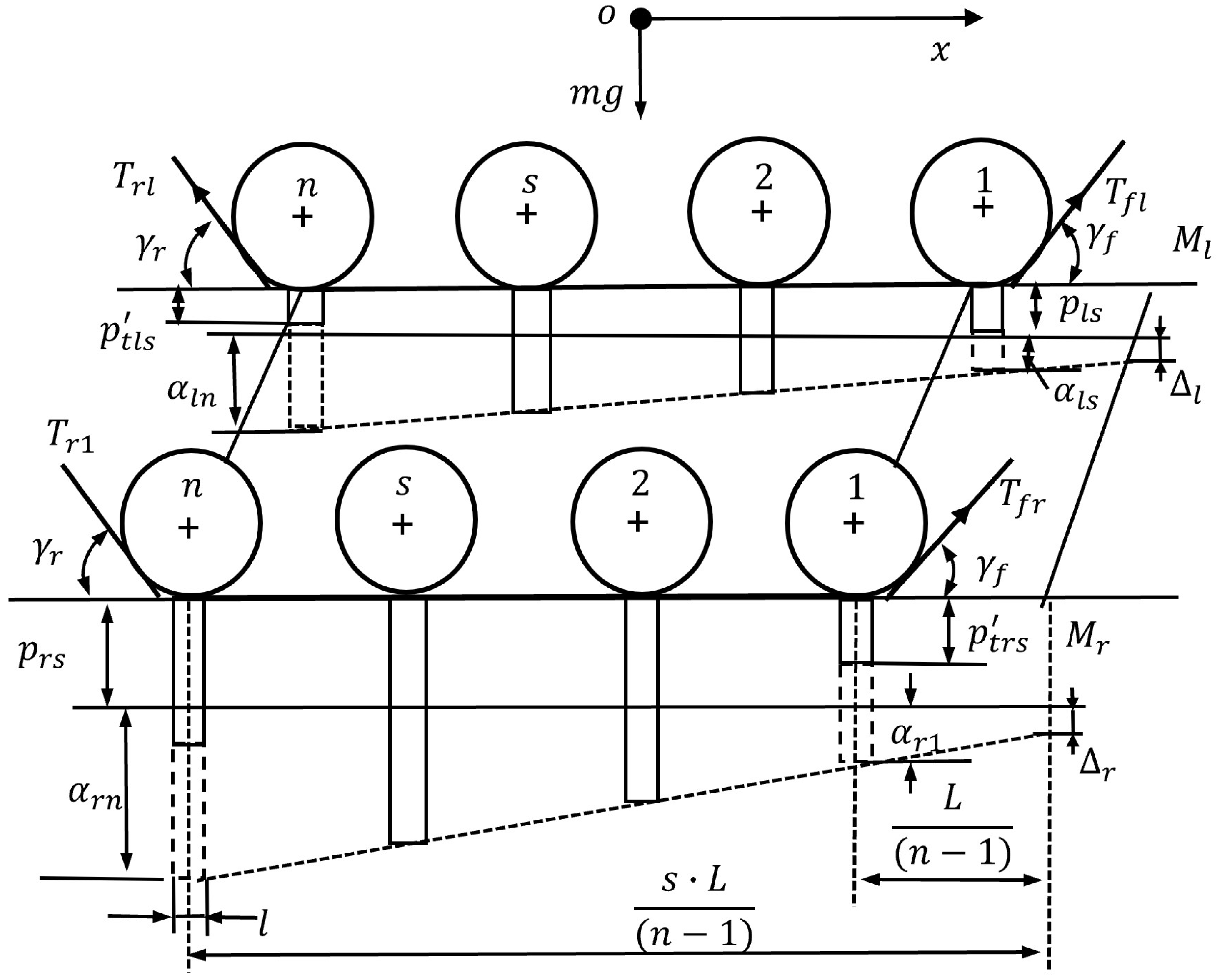
2.1. The Calculation of Shear Displacement in the Steering Process of a Tracked Vehicle
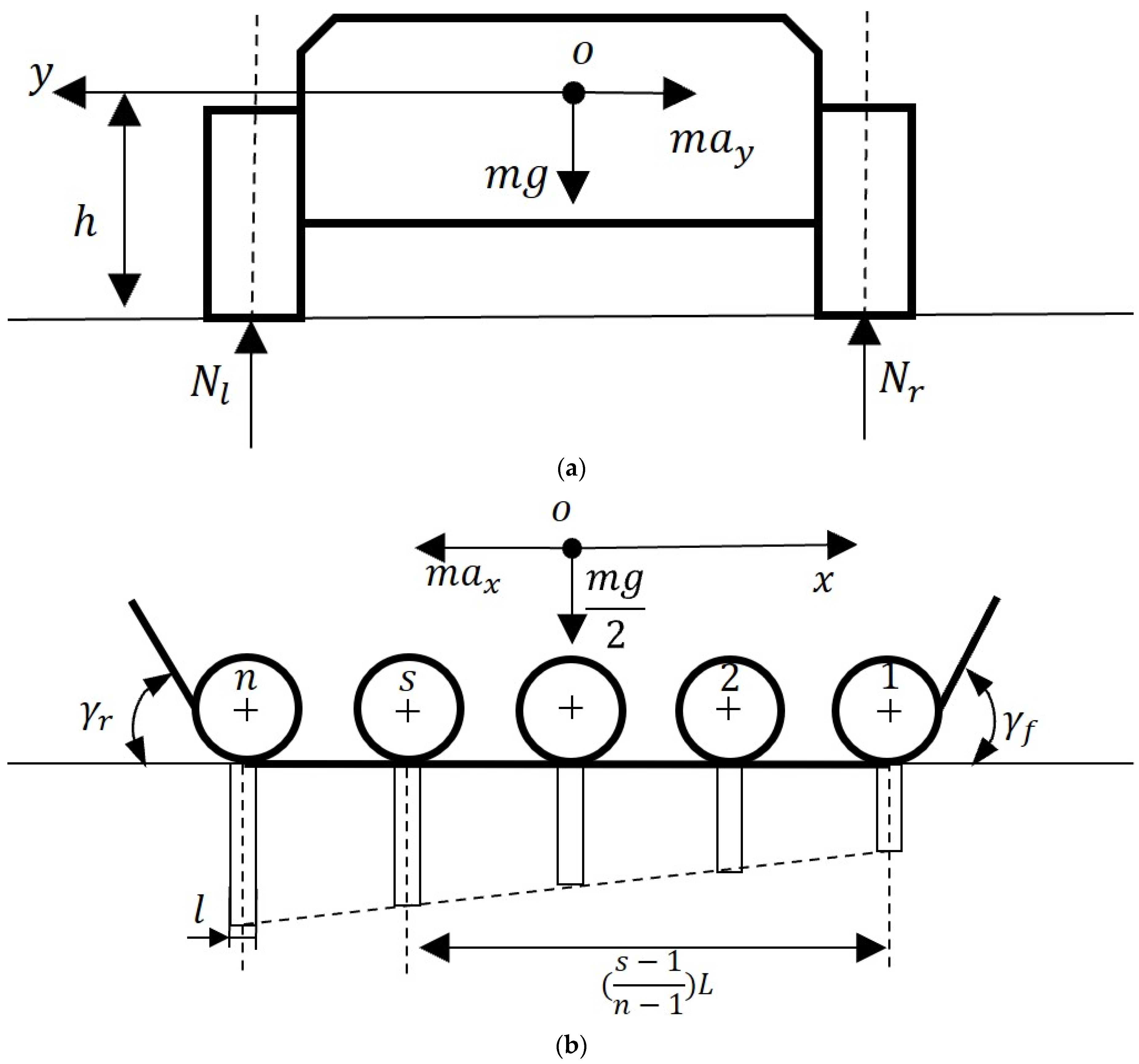
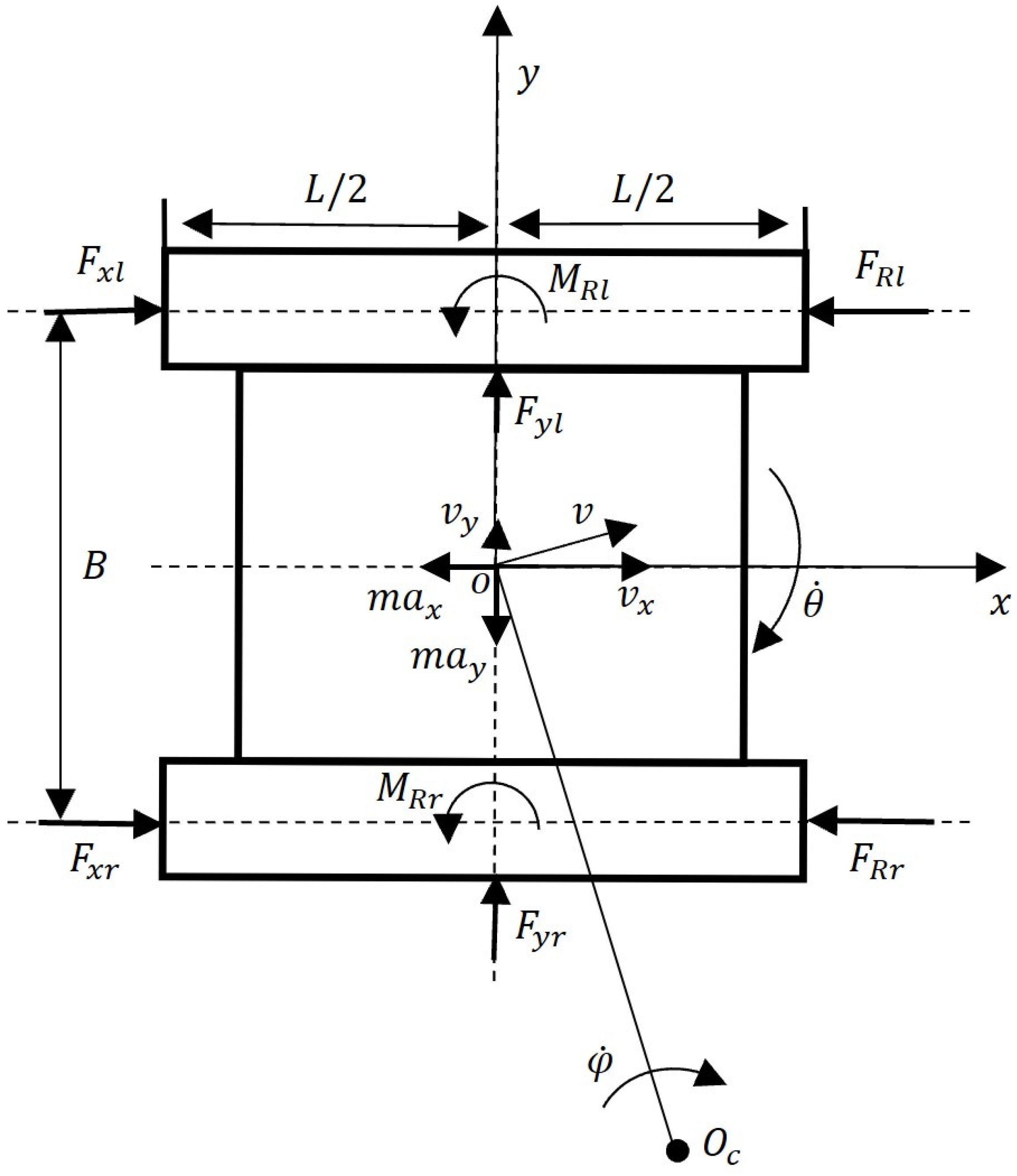
2.2. Tracked Vehicle Steering Force Analysis
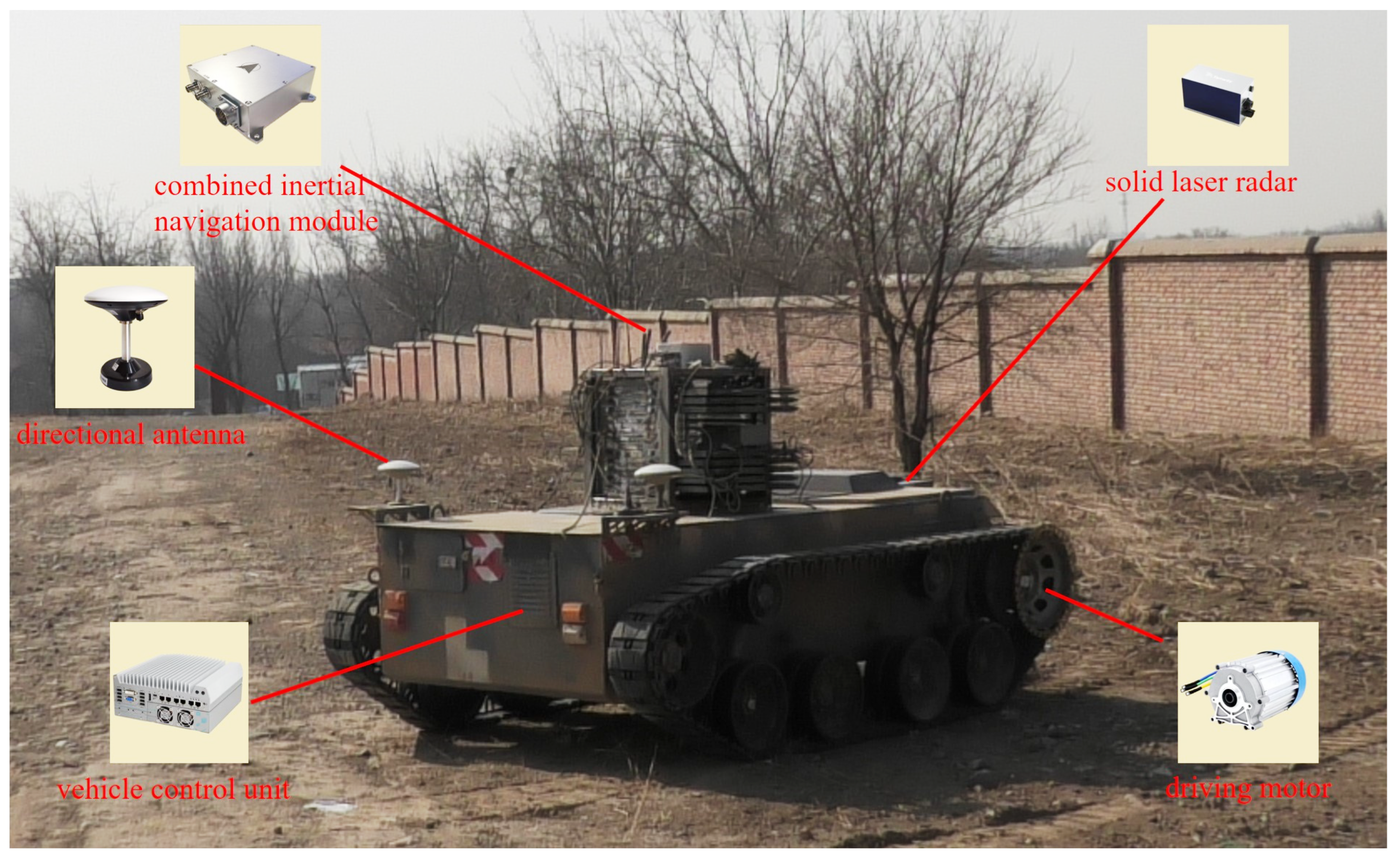
3. Experimental Verification
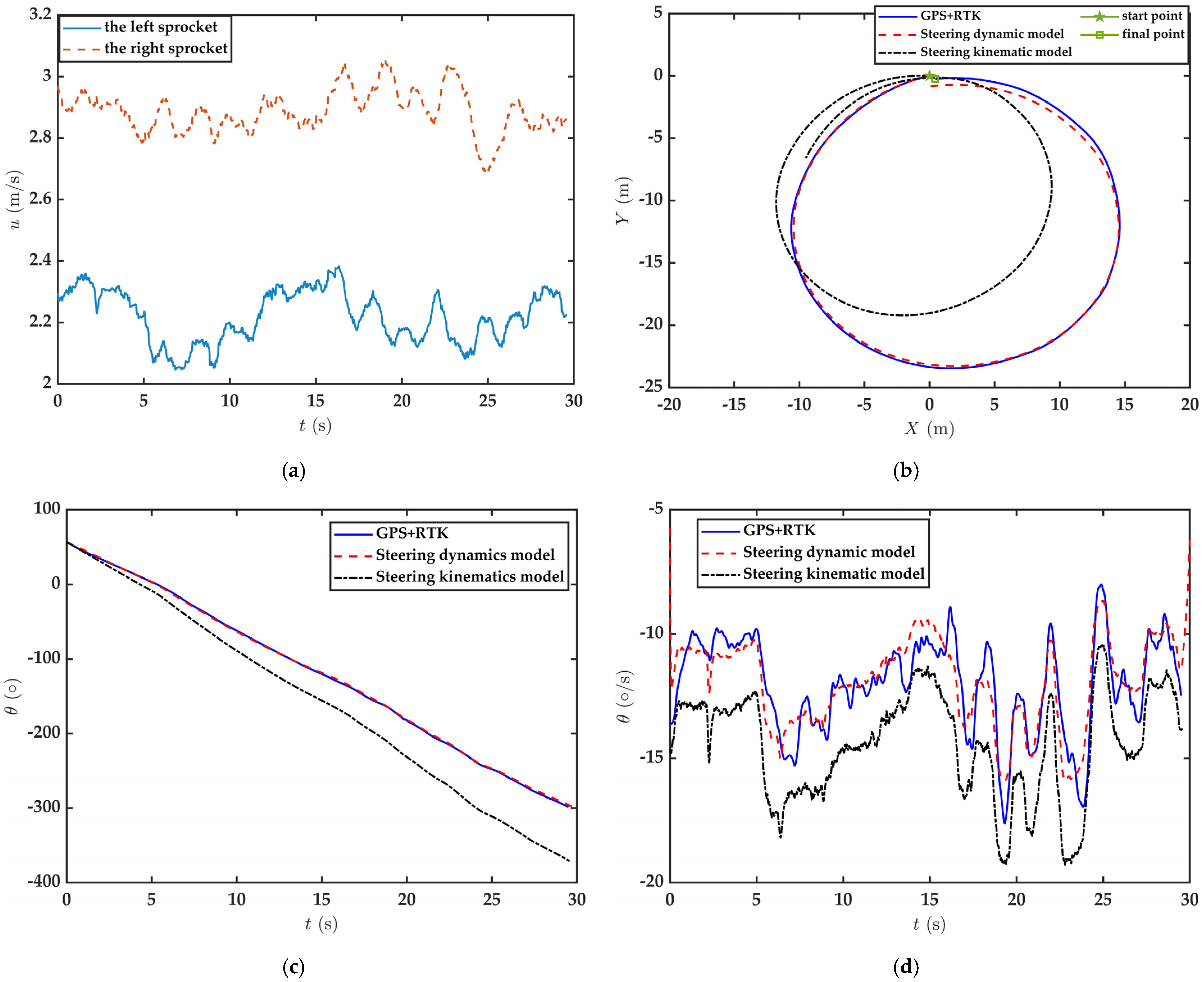
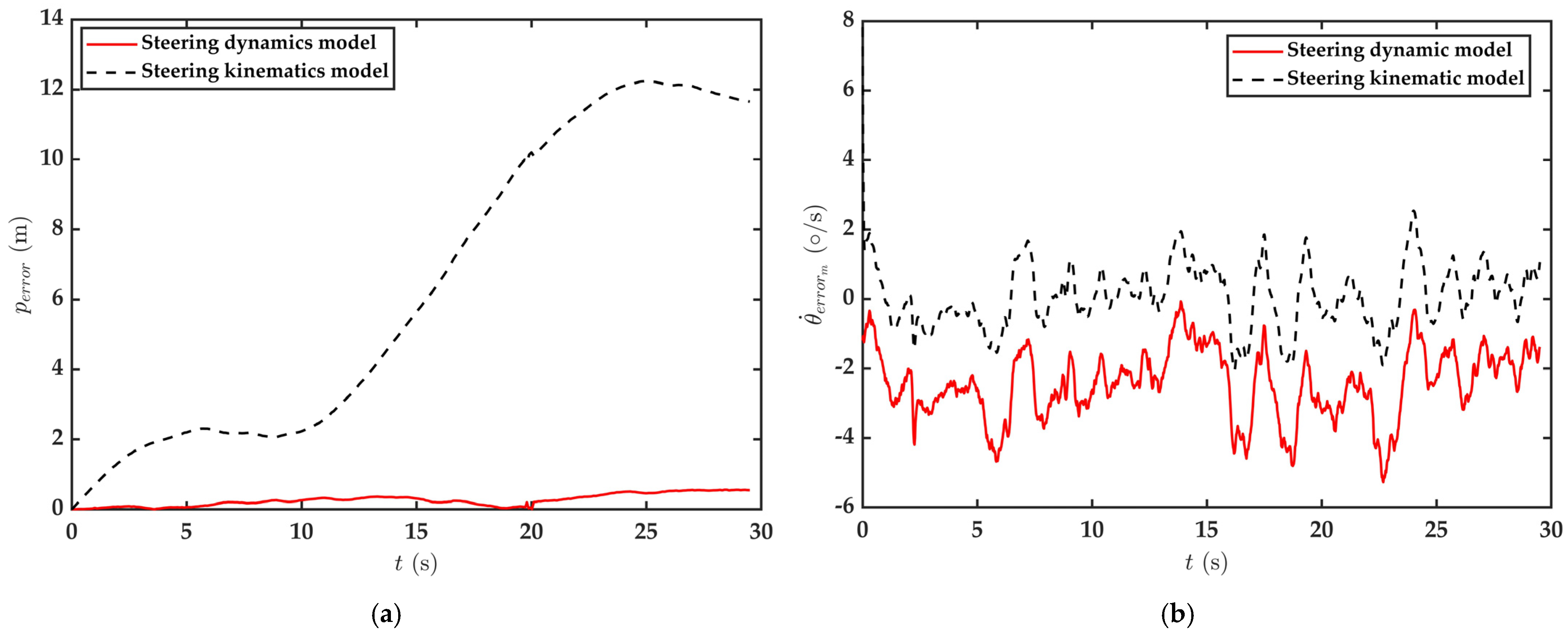
3.1. The Tracked Vehicle Performed Uniform Circular Motion on a Sand Road
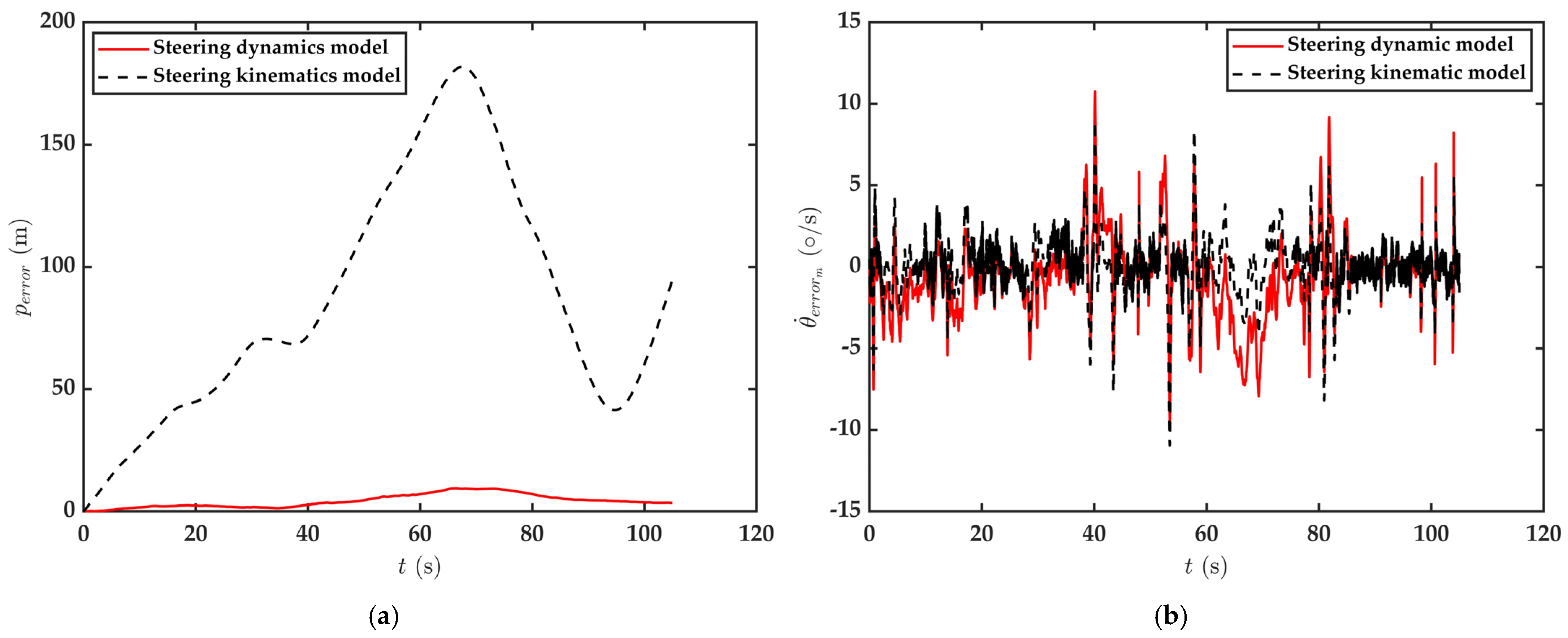
3.2. The Tracked Vehicle Performed General Turning Motion on a Sand Road
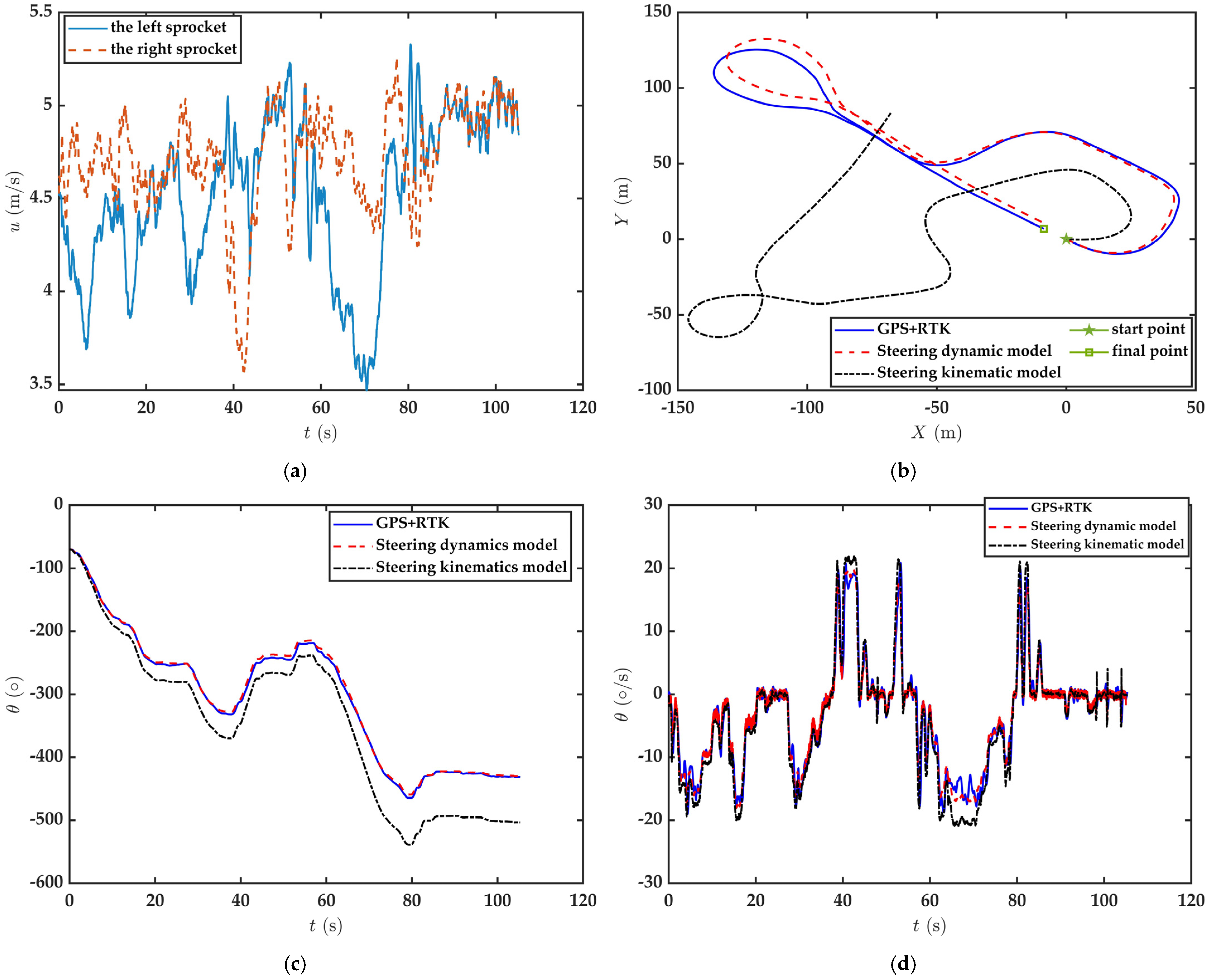
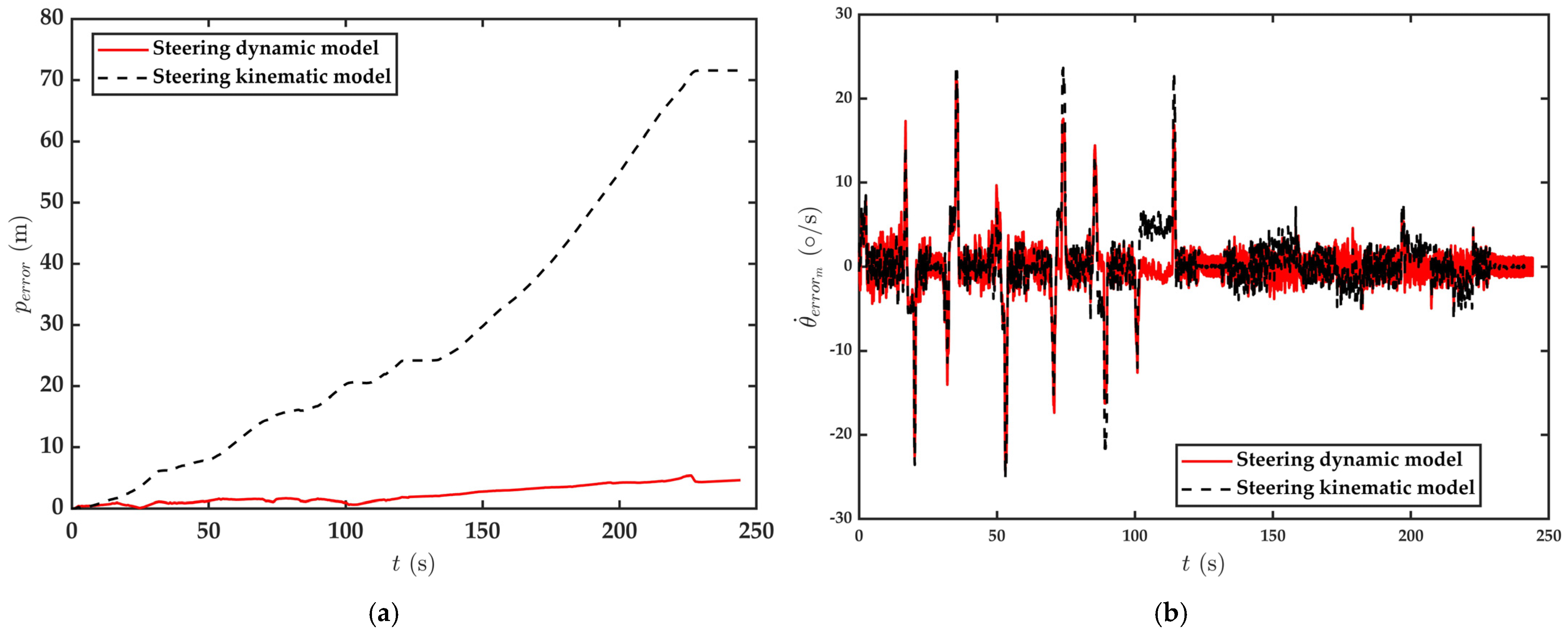
3.3. The Tracked Vehicle Performed Continuous Steering Motion on a Cement Pavement
4. Conclusions
- (1)
- Using this steering dynamics model to estimate the position of a tracked vehicle produced a higher accuracy than utilizing the kinematics model. This method can provide a reference for unmanned tracked vehicles working in special environments that cannot use precise positioning systems.
- (2)
- The experimental results indicate that large errors are still produced when the dynamics model is used for tracked vehicle position estimations because the dynamics model ignores the effects of some factors, such as the road slope. Fully considering the effects of pavement parameters and improving the calculation accuracy of the dynamics model will be focal points of future research endeavors.
- (3)
- With the development of vehicle sensors, it is possible to measure some motion parameters of tracked vehicles, such as yaw angle, centroid velocity, and centroid sideslip angle. Therefore, it is also theoretically feasible to apply the dynamics model proposed in this paper to the trajectory tracking control of tracked vehicles for model prediction.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| Notation | |
| the shear stress | |
| the ground pressure of the tracks | |
| the soil cohesion parameter | |
| the soil internal friction angle | |
| the shear displacement | |
| the soil deformation parameter | |
| a body coordinate system | |
| the geodetic coordinate system | |
| the centroid velocity | |
| the velocity component of in the -axis direction | |
| the velocity component of in the -axis direction | |
| the sideslip angle of the tracked vehicle | |
| the yaw angle | |
| the complementary angle of the angle between and the -axis | |
| the plane length of contact between track and ground | |
| the plane width of contact between track and ground | |
| the center line distance of the two sides of the track ground plane | |
| the angle between the direction of velocity of a point on the track and the -direction | |
| the instantaneous steering center of the tracks on both sides | |
| the turning center | |
| the offset of relative to in the -direction | |
| the number of load-bearing wheels on one track | |
| the vertical track tension components of the sth load-bearing wheels of the tracks on both sides | |
| the front track tensions of the tracks on both sides | |
| the rear track tensions of the tracks on both sides | |
| the approaching angle | |
| the departure angle | |
| the length of the ground pressure area of a single load-bearing wheel | |
| the normal force exerted by the ground on both tracks | |
| the height of center of gravity | |
| the component of the shear force in the x-direction | |
| the component of the shear force in the y-direction | |
| the steering resistance torques of the left and right tracks | |
| the rolling resistances of the tracks on both sides | |
| the ground rolling resistance coefficient | |
| the moment of inertia of the tracked vehicle | |
| the mass of the tracked vehicle | |
| the radius of the driving wheel | |
References
- Jiang, H.; Yan, C.; Li, Q.; Liang, L.; Li, J.; Tan, Y. Review of Static Stability of Self-propelled Agricultural Machinery. J. Xihua Univ. (Nat. Sci. Ed.) 2023, 42, 32–41. [Google Scholar]
- Tanyıldızı, A.K. Design, Control and Stabilization of a Transformable Wheeled Fire Fighting Robot with a Fire-Extinguishing, Ball-Shooting Turret. Machines 2023, 11, 492. [Google Scholar] [CrossRef]
- Atia, M.M.; Waslander, S.L. Map-aided adaptive GNSS/IMU sensor fusion scheme for robust urban navigation. Measurement 2019, 131, 615–627. [Google Scholar] [CrossRef]
- Pivarčiová, E.; Božek, P.; Turygin, Y.; Zajačko, I.; Shchenyatsky, A.; Václav, Š.; Císar, M.; Gemela, B. Analysis of control and correction options of mobile robot trajectory by an inertial navigation system. Int. J. Adv. Robot. Syst. 2018, 15, 1729881418755165. [Google Scholar] [CrossRef]
- Ulaş, C.; Temeltaş, H. 3D multi-layered normal distribution transform for fast and long range scan matching. J. Intell. Robot. Syst. 2013, 71, 85–108. [Google Scholar] [CrossRef]
- Cadena, C.; Carlone, L.; Carrillo, H.; Latif, Y.; Scaramuzza, D.; Neira, J.; Reid, I.D.; Leonard, J.J. Simultaneous localization and mapping: Present, future, and the robust-perception age. IEEE Trans. Robot. 2016, 32, 1039–1332. [Google Scholar] [CrossRef]
- Chen, S.; Liu, B.; Feng, C.; Vallespi-Gonzalez, C.; Wellington, C. 3d point cloud processing and learning for autonomous driving: Impacting map creation, localization, and perception. IEEE Signal Process. Mag. 2020, 38, 68–86. [Google Scholar] [CrossRef]
- Kong, J.; Pfeiffer, M.; Schildbach, G.; Borrelli, F. Kinematic and dynamic vehicle models for autonomous driving control design. In Proceedings of the 2015 IEEE Intelligent Vehicles Symposium (IV), Seoul, Republic of Korea, 28 June–1 July 2015; pp. 1094–1099. [Google Scholar]
- Pentzer, J.; Brennan, S.; Reichard, K. Model-based prediction of skid-steer robot kinematics using online estimation of track instantaneous centers of rotation. J. Field Robot. 2014, 31, 455–476. [Google Scholar] [CrossRef]
- Martínez, J.L.; Mandow, A.; Morales, J.; Garcia-Cerezo, A.; Pedraza, S. Kinematic modelling of tracked vehicles by experimental identification. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Cat. No. 04CH37566), Sendai, Japan, 28 September–2 October 2004; Volume 2, pp. 1487–1492. [Google Scholar]
- Xiong, G.; Lu, H.; Guo, K.; Chen, H. Research on trajectory prediction of tracked vehicles based on real time slip estimation. Acta ArmamentarII 2017, 38, 600. [Google Scholar]
- Rogers-Marcovitz, F.; George, M.; Seegmiller, N.; Kelly, A. Aiding off-road inertial navigation with high performance models of wheel slip. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Algarve, Portugal, 7–12 October 2012; pp. 215–222. [Google Scholar]
- Moosavian, S.A.A.; Kalantari, A. Experimental slip estimation for exact kinematics modeling and control of a tracked mobile robot. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 95–100. [Google Scholar]
- Min, H.; Wu, X.; Cheng, C.; Zhao, X. Kinematic and dynamic vehicle model-assisted global positioning method for autonomous vehicles with low-cost GPS/camera/in-vehicle sensors. Sensors 2019, 19, 5430. [Google Scholar] [PubMed]
- Purdy, D.J. A heuristic investigation into the design of a dynamic yaw controller for a high-speed tracked vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 234, 689–701. [Google Scholar] [CrossRef]
- Jing, C.; Wei, C.; Li, X.; Peng, Z. Test method of steering dynamic characteristics of differential steering mechanism of tracked vehicle. Trans. Chin. Soc. Agric. Eng. 2009, 25, 62–66. [Google Scholar]
- Wong, J.; Chiang, C. A general theory for skid steering of tracked vehicles on firm ground. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2001, 215, 343–355. [Google Scholar] [CrossRef]
- Tang, S.; Yuan, S.; Hu, J.; Li, X.; Zhou, J.; Guo, J. Modeling of steady-state performance of skid-steering for high-speed tracked vehicles. J. Terramech. 2017, 73, 25–35. [Google Scholar] [CrossRef]
- Wang, H.; Chen, B.; Rui, Q.; Guo, J.; Shi, L.-C. Analysis and experiment of steady-state steering of tracked vehicle under concentrated load. Acta ArmamentarII 2016, 37, 2196. [Google Scholar]
- Özdemir, M.N.; Kılıç, V.; Ünlüsoy, Y.S. A new contact & slip model for tracked vehicle transient dynamics on hard ground. J. Terramech. 2017, 73, 3–23. [Google Scholar]
- Jia, W.; Liu, X.; Zhang, C.; Qiu, M.; Zhang, Y.; Quan, Q.; Sun, H. Research on Steering Stability of High-Speed Tracked Vehicles. Math. Probl. Eng. 2022, 2022, 4850104. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Road Surface Parameters | Vehicle Structural Parameters | |||||
|---|---|---|---|---|---|---|
| c (Pa) | ϕ (°) | m (kg) | Iz (kg·m2) | L (m) | B (m) | b (m) |
| 1.3 | 31.1 | 13,000 | 4500 | 2.78 | 1.64 | 0.28 |
| 1.2 | 0.065 | 0.12 | 0.183 | 1.059 | 4 | |
| Experiment Number | Kinematics Model | Dynamics Model | ||||
|---|---|---|---|---|---|---|
| 1 | 2.3 | 12.28 | 2.036 | 5.793 | 0.278 | 1.172 |
| 2 | 2.6 | 11.24 | 2.44 | 6.34 | 0.866 | 0.263 |
| 3 | 2.6 | 16.35 | 1.86 | 17.46 | 0.07 | 2.97 |
| 4 | 2.6 | 18.12 | 1.78 | 16.69 | 0.103 | 1.52 |
| 5 | 2.6 | 18.5 | 1.68 | 11.56 | 0.21 | 1.68 |
| 6 | 2.6 | 19.64 | 1.46 | 12.33 | 0.213 | 1.94 |
| 7 | 3.3 | 12.6 | 2.66 | 6.04 | 0.53 | 1.55 |
| 8 | 3.5 | 19.5 | 2.11 | 13 | 0.34 | 2.12 |
| 9 | 3.6 | 12.8 | 3.21 | 7.65 | 0.57 | 1.61 |
| 10 | 3.7 | 20.3 | 2.18 | 13.9 | 0.07 | 2.28 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jia, W.; Liu, X.; Zhang, C.; Xue, D.; Zhang, S. Position Estimation Method for Unmanned Tracked Vehicles Based on a Steering Dynamics Model. World Electr. Veh. J. 2024, 15, 120. https://doi.org/10.3390/wevj15030120
Jia W, Liu X, Zhang C, Xue D, Zhang S. Position Estimation Method for Unmanned Tracked Vehicles Based on a Steering Dynamics Model. World Electric Vehicle Journal. 2024; 15(3):120. https://doi.org/10.3390/wevj15030120
Chicago/Turabian StyleJia, Weijian, Xixia Liu, Chuanqing Zhang, Dabing Xue, and Shaoliang Zhang. 2024. "Position Estimation Method for Unmanned Tracked Vehicles Based on a Steering Dynamics Model" World Electric Vehicle Journal 15, no. 3: 120. https://doi.org/10.3390/wevj15030120
APA StyleJia, W., Liu, X., Zhang, C., Xue, D., & Zhang, S. (2024). Position Estimation Method for Unmanned Tracked Vehicles Based on a Steering Dynamics Model. World Electric Vehicle Journal, 15(3), 120. https://doi.org/10.3390/wevj15030120