
Wireless Charging for Electric Vehicles: A Survey and Comprehensive Guide
 ,
,  , ,
, ,
Abstract
1. Introduction
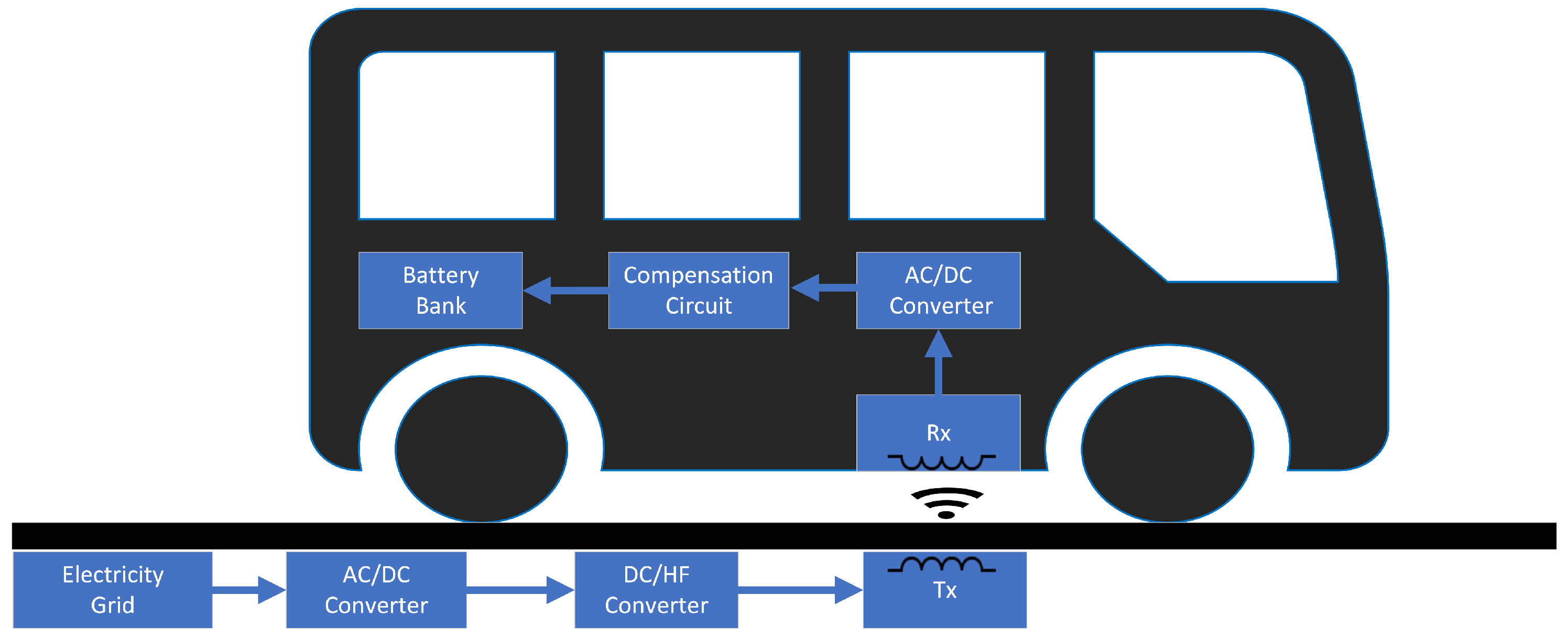
- Static: the vehicle charges when it is stationary or parked.
- Quasi-dynamic: the vehicle is charged as it decelerates to or accelerates from a stationary state at a low speed.
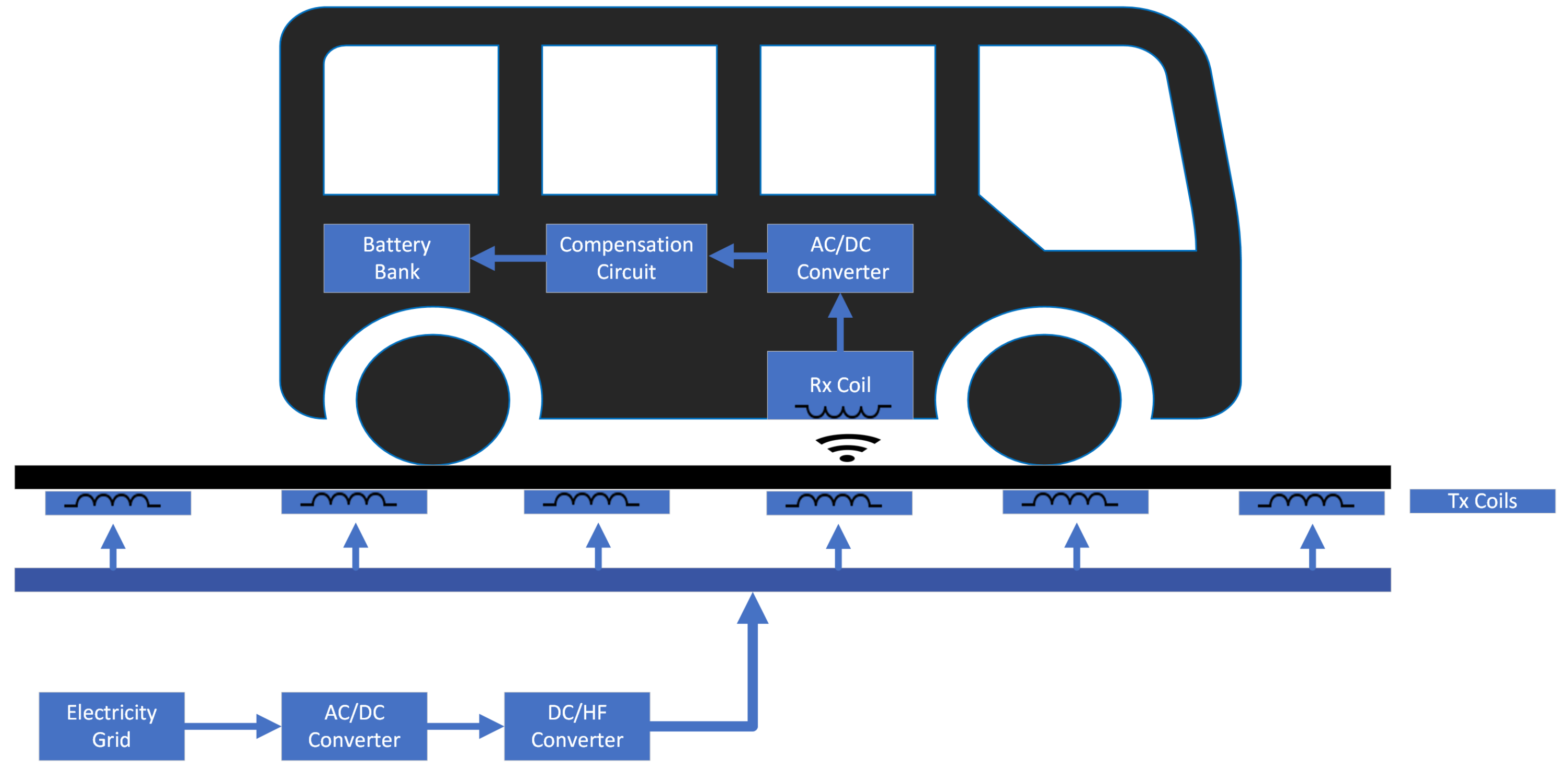
- Dynamic: the vehicle charges while it is completely in transit.
2. Technical Background
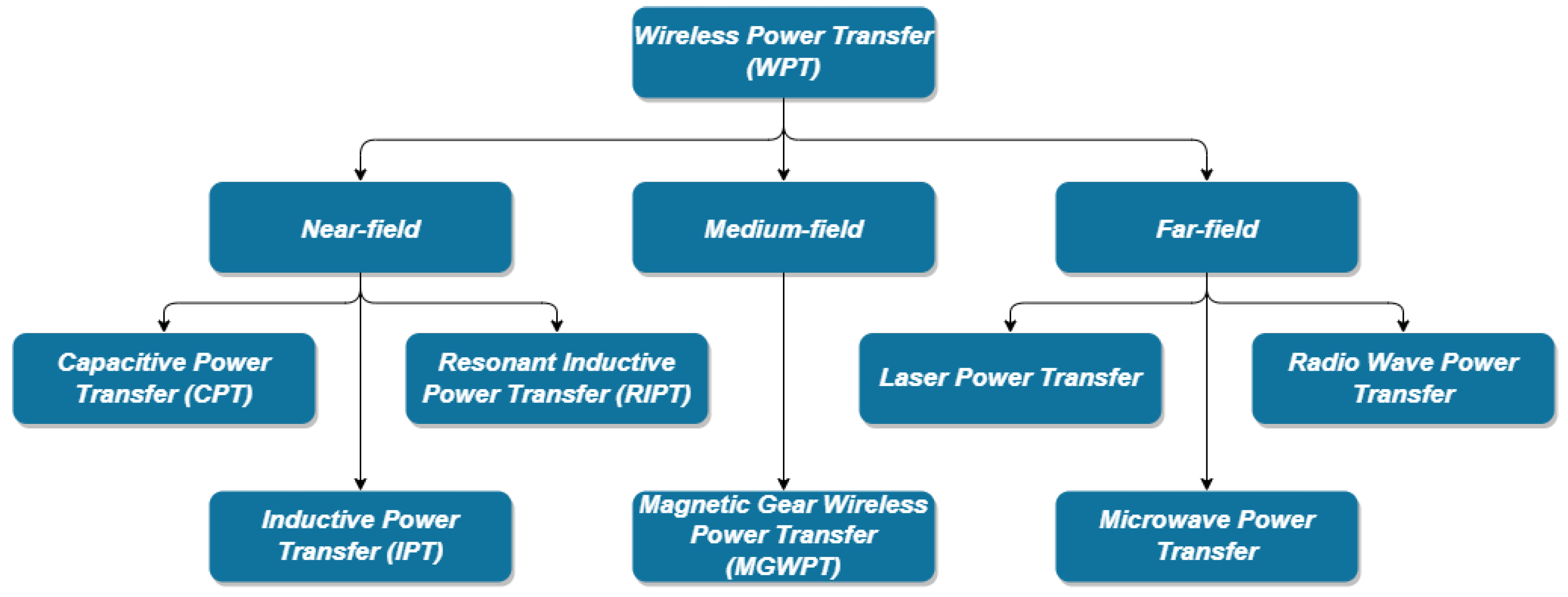
2.1. Near-Field Charging
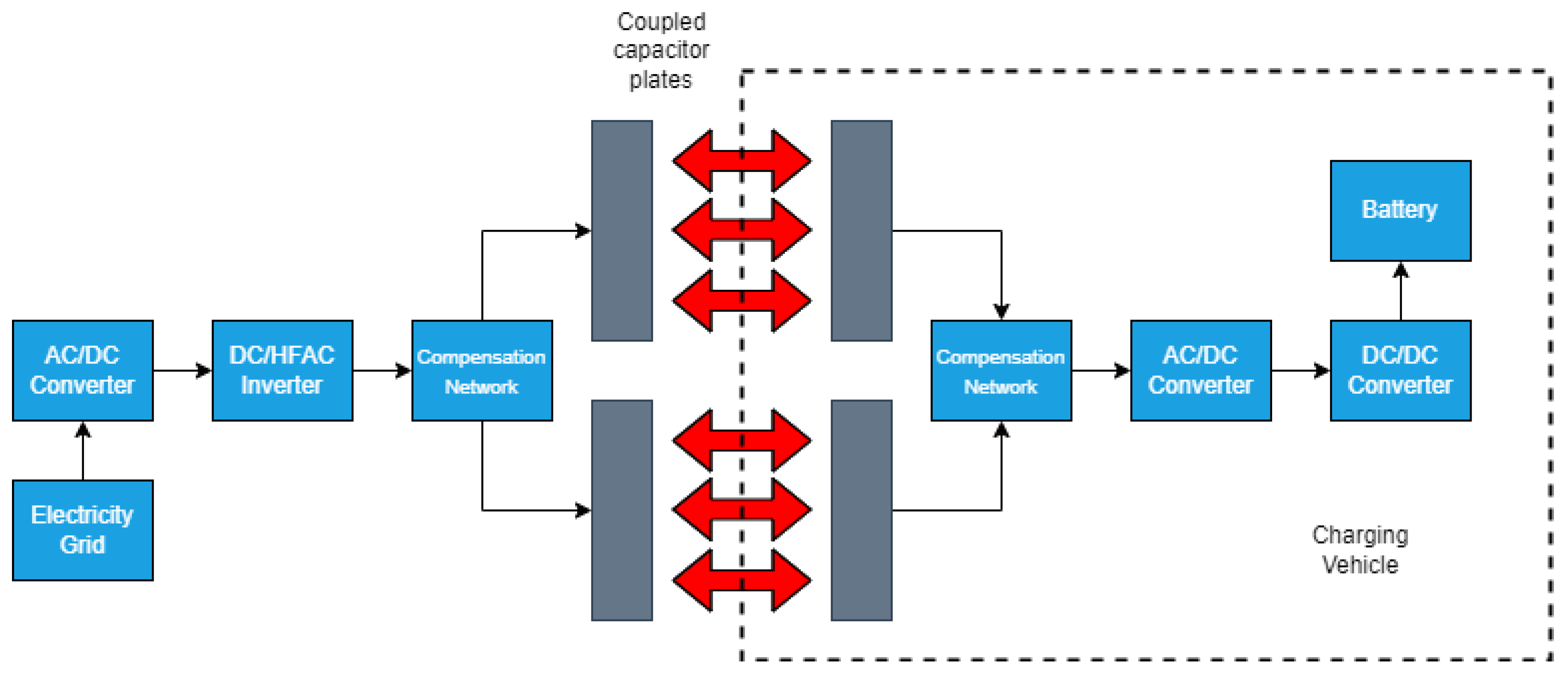
2.1.1. Capacitive Power Transfer (CPT)
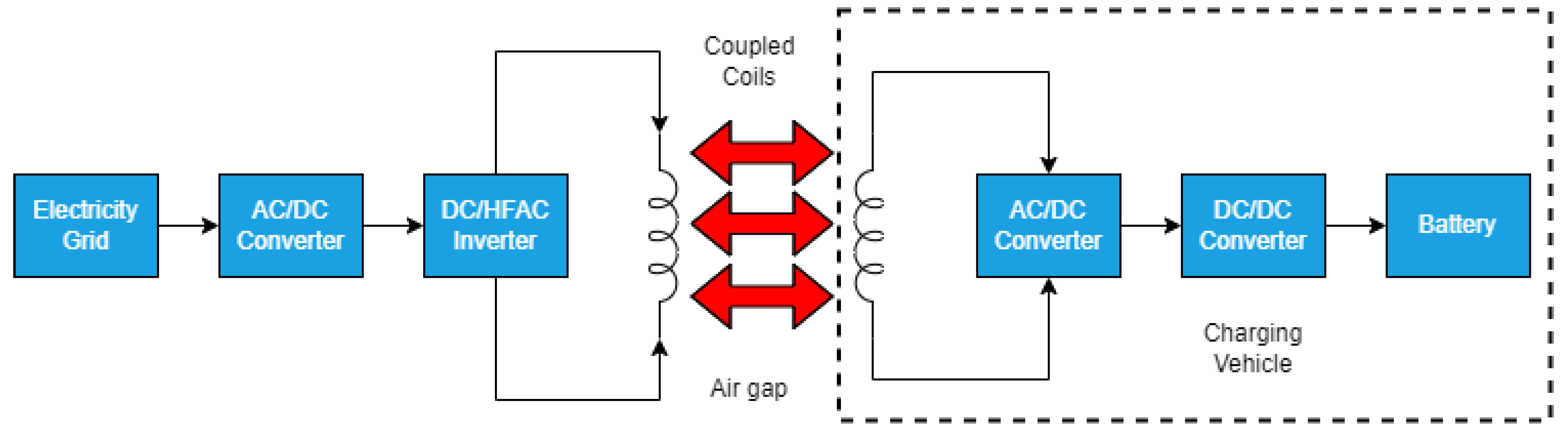
2.1.2. Inductive Power Transfer (IPT)
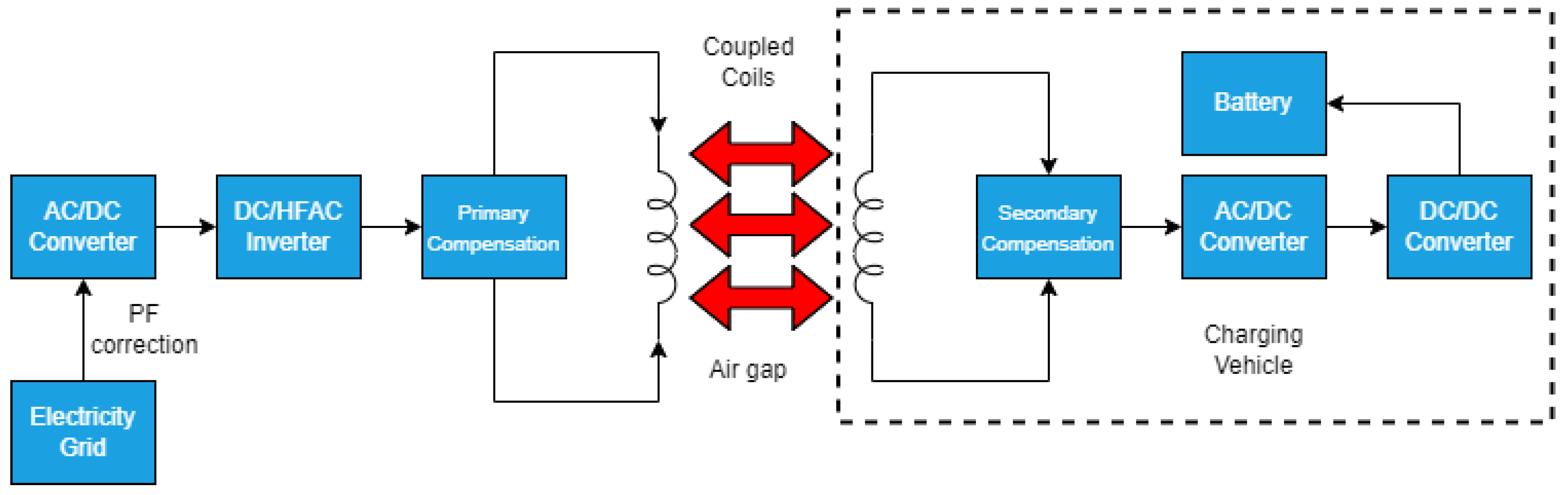
2.1.3. Resonant Inductive Power Transfer (RIPT)
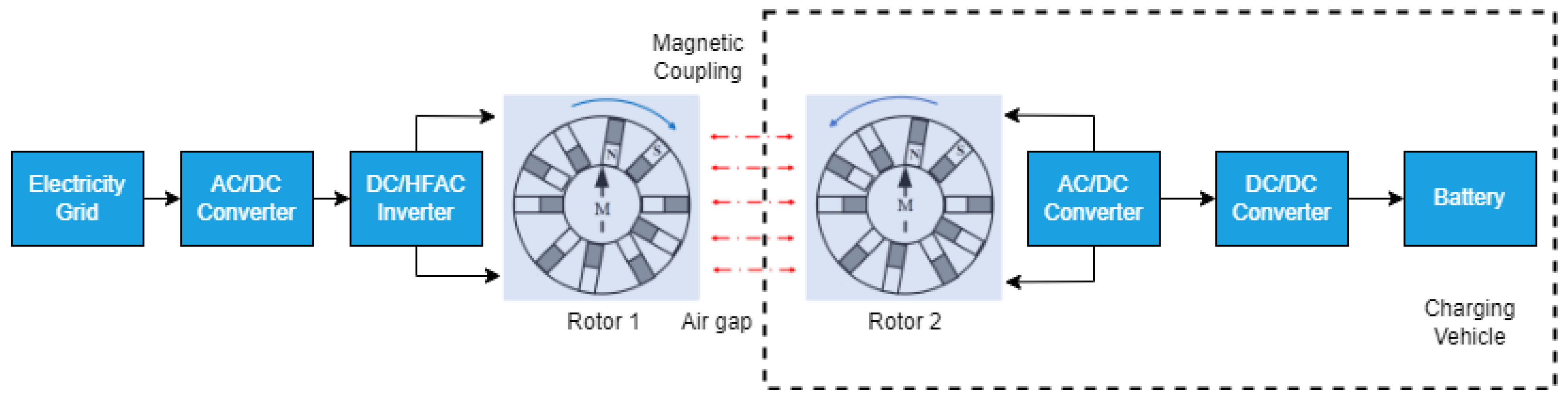
2.2. Medium-Field Charging (Magnetic Gear Wireless Power Transfer or MGWPT)
2.3. Far-Field Charging
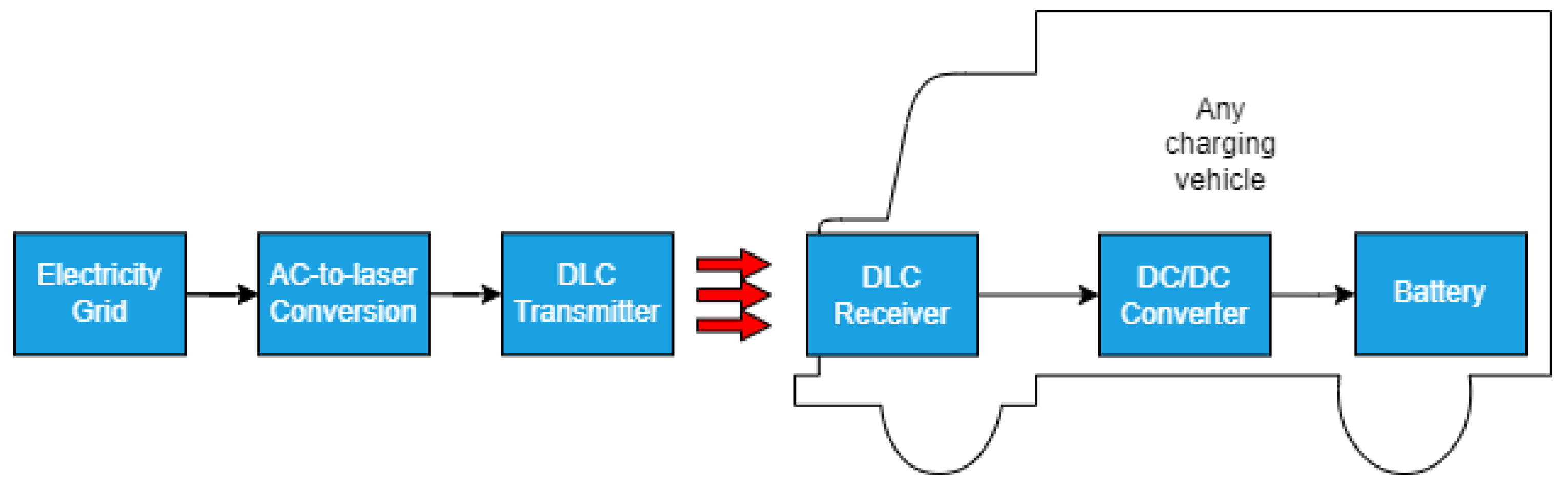
2.3.1. Laser Charging
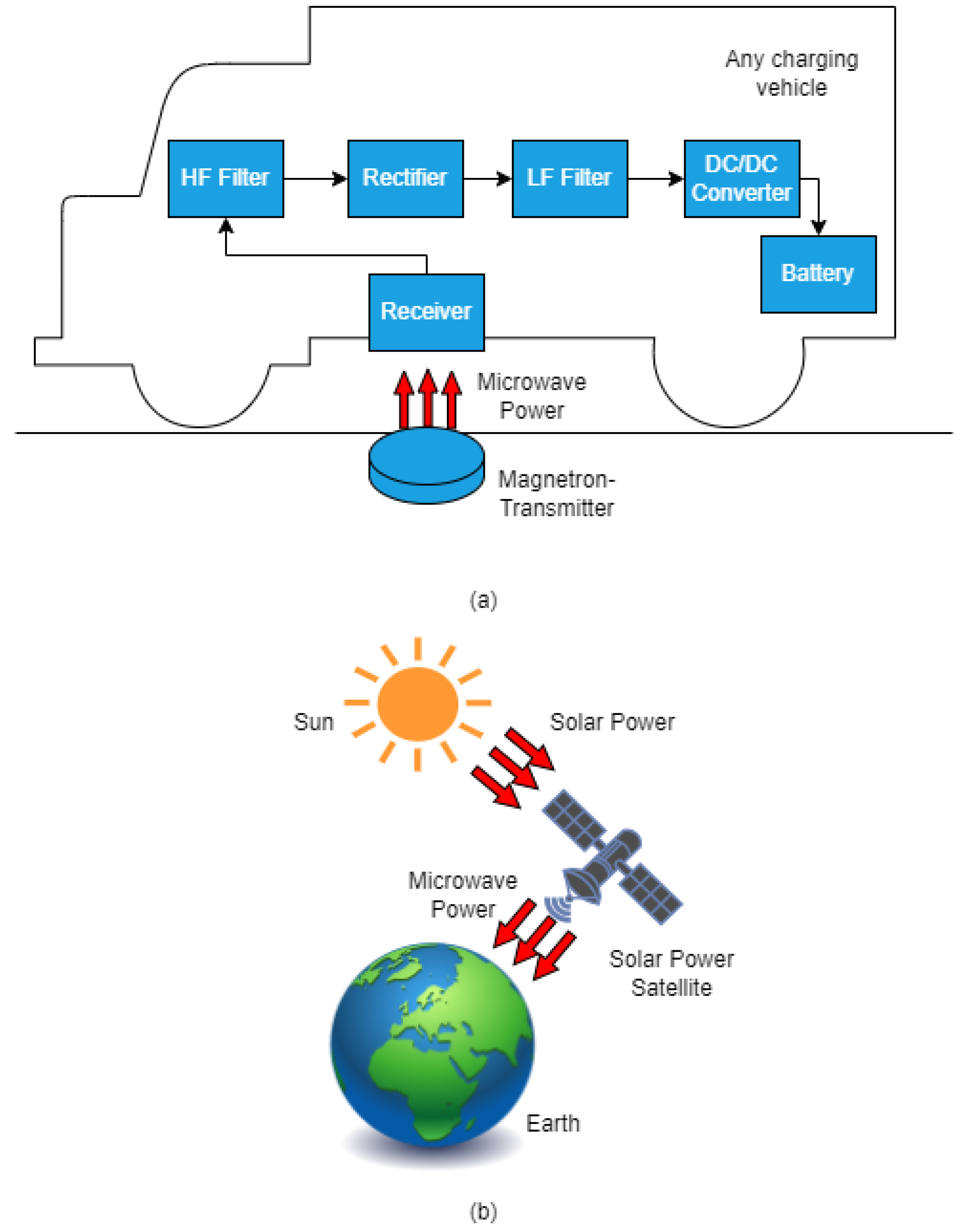
2.3.2. Microwave Charging
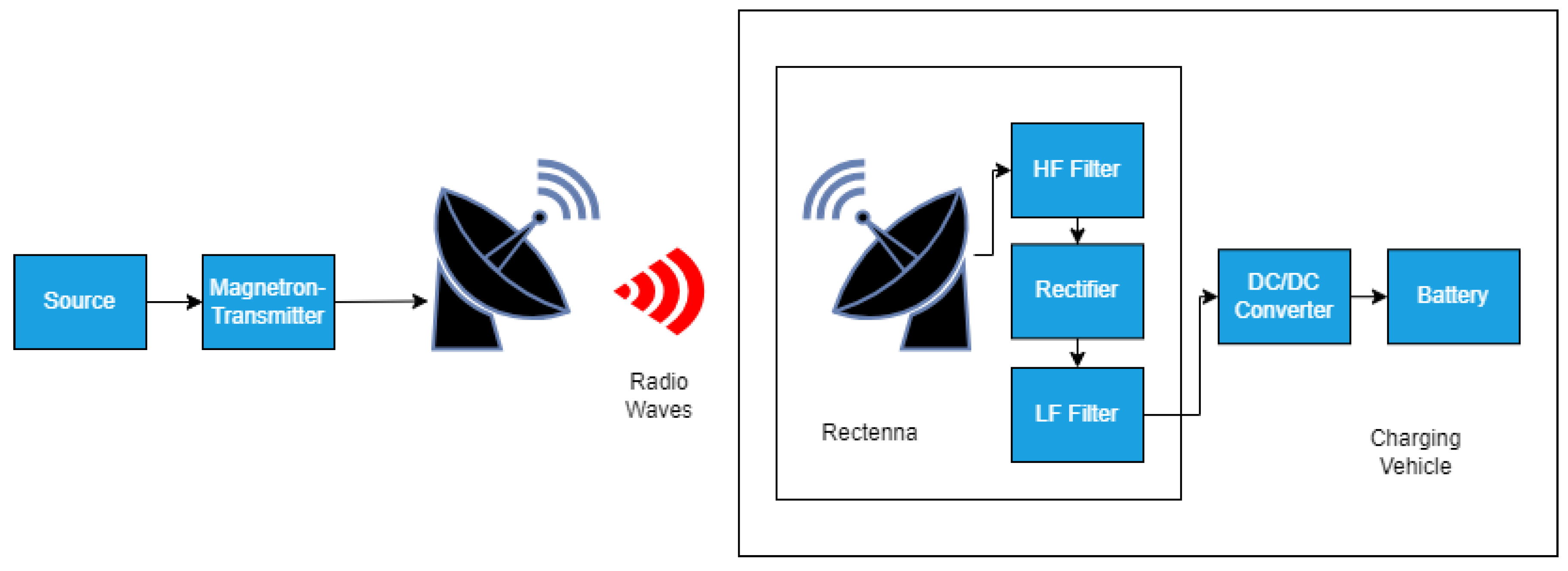
2.3.3. Radio Wave Charging
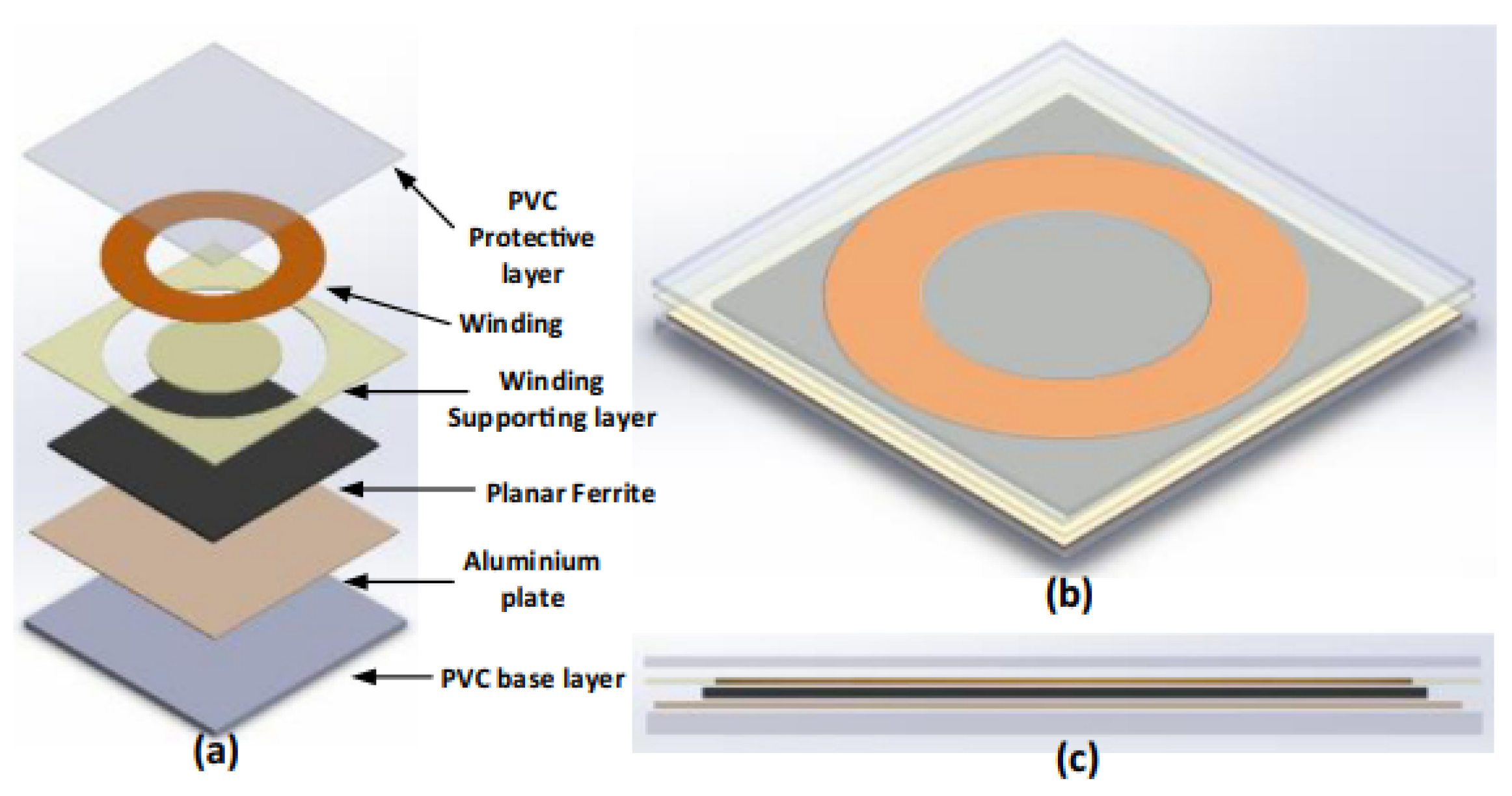
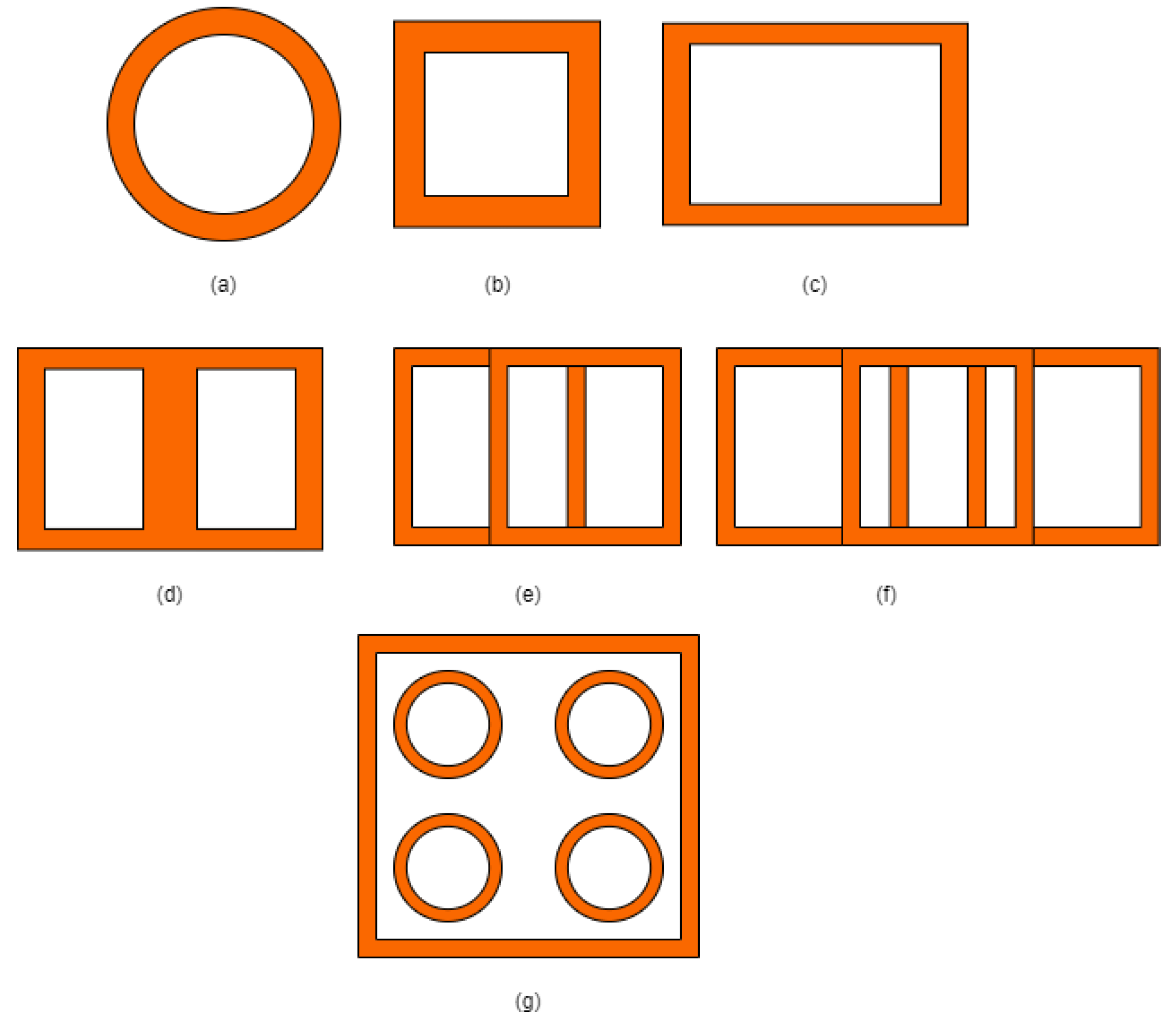
2.4. Coil Designs
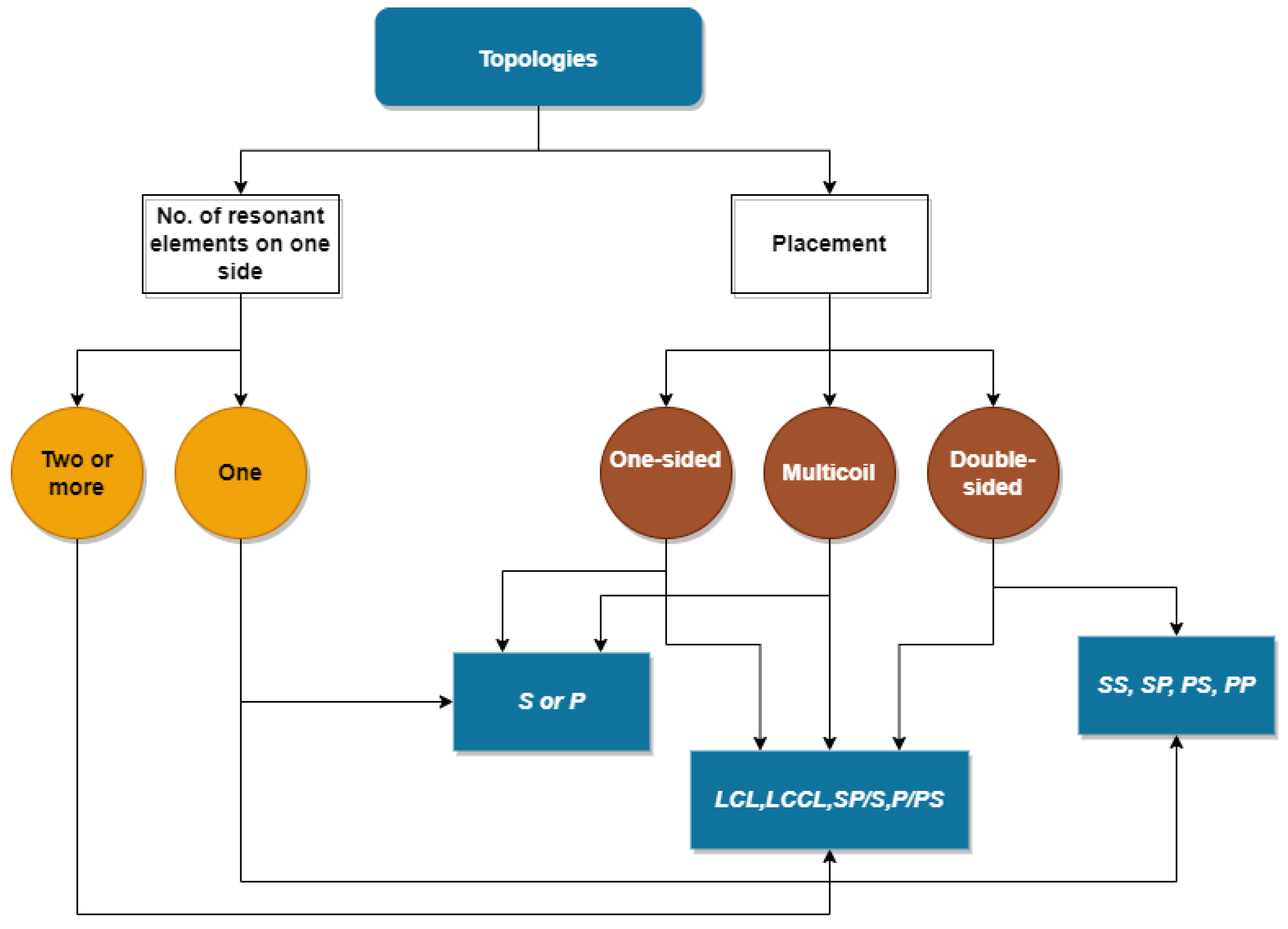
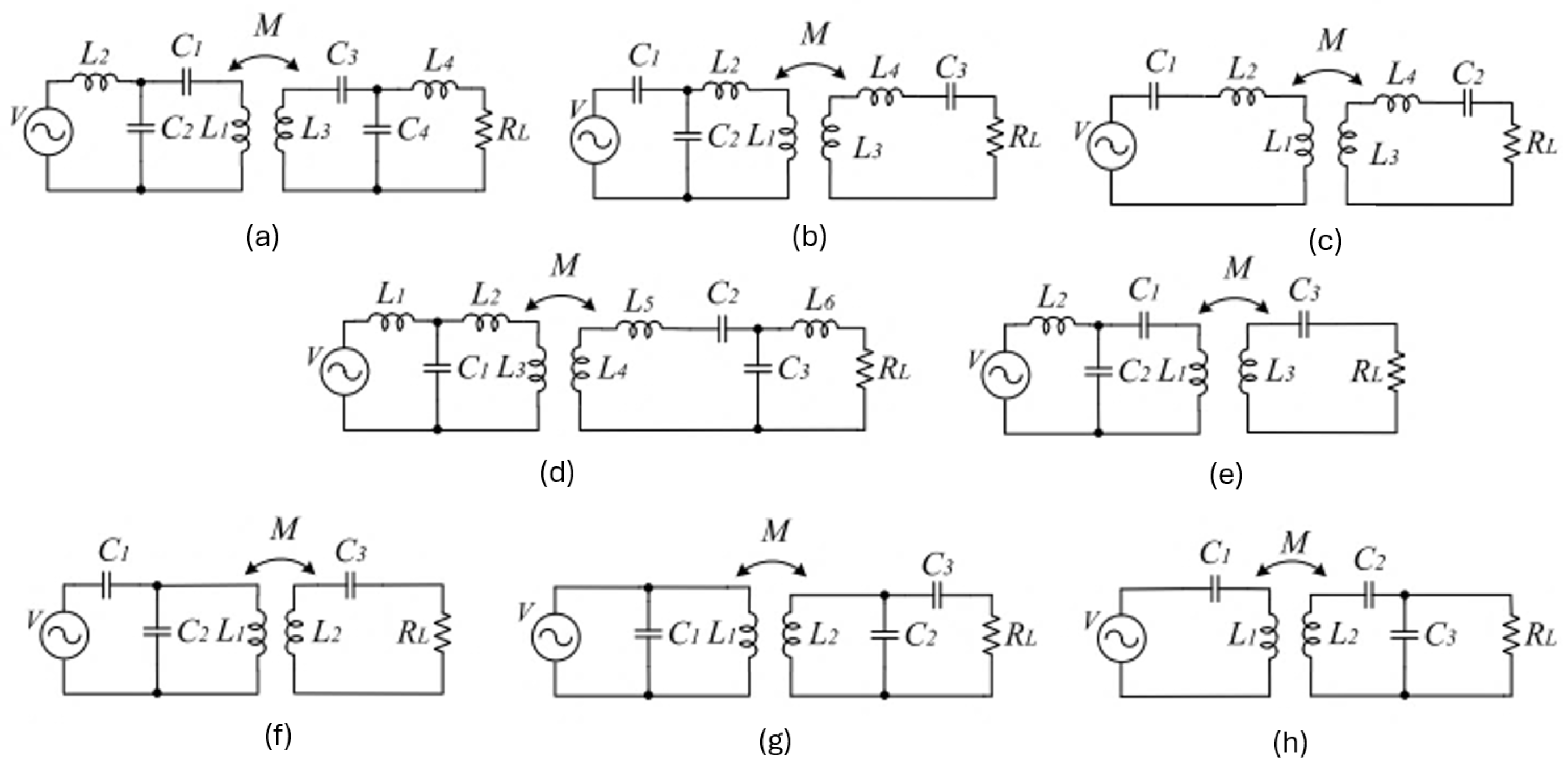
2.5. Compensation Topologies
2.6. Converter Topologies
2.7. Communication Systems
3. Operations and Systems Background
3.1. Charging Infrastructure Allocation
3.1.1. Micro-Allocation Model
- Every bus route within the system adheres to a predetermined path.
- Each bus route is equipped with a central station that serves as the starting and ending point for all bus services.
- After completing a full service loop, a wireless charging bus will be recharged to full capacity at the central station before embarking on another service circuit.
- The velocity pattern and the number of passengers getting on or off at bus stops are determined in advance.
3.1.2. Macro-Allocation Model
3.2. Drive Range Extension Analyses
3.3. Cost and Benefit Analyses and Environment Assessments
3.4. Electricity Pricing and Billing
3.5. Construction and Installation Challenges
3.6. Other Practical Perspectives
4. Standardization Status
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| EV | Electric vehicle |
| BEV | Battery electric vehicle |
| SUV | Sports utility vehicle |
| WPT | Wireless power transfer |
| EM | Electromagnetic |
| GA | Ground assembly |
| VA | Vehicle assembly |
| Tx | Transmitter pad |
| Rx | Receiver pad |
| PF | Power factor |
| CPT | Capacitive power transfer |
| IPT | Inductive power transfer |
| RIPT | Resonant inductive power transfer |
| EMI | Electromagnetic interference |
| GM | General Motors |
| ORNL | Oak Ridge National Laboratory |
| MGWPT | Magnetic gear wireless power transfer |
| PM | Permanent magnets |
| BMS | Battery management system |
| DLC | Distributed laser charging |
| LOS | Line-of-sight |
| JPL | Jet Propulsion Laboratory |
| NPP | Non-polarized pad |
| PP | Polarized pad |
| DD | Double D |
| DDQ | Double D quadrature |
| BP | Bipolar |
| QDQ | Quad D quadrature |
| SS | Series–series |
| SP | Series–parallel |
| PS | Parallel–series |
| PP | Parallel–parallel |
| SAE | Society of Automotive Engineers |
| SoC | State of charge |
| SLDC | Single link–dual carrier |
| SLSC | Single link–single carrier |
| DLDC | Dual link–dual carrier |
| FOD | Foreign object detection |
| AI | Artificial intelligence |
| GNN | Generative neural network |
| ML | Machine learning |
| AM | Additive manufacturing |
| OLEV | On-line electric vehicle |
| KAIST | Korea Advanced Institute of Science and Technology |
| FCLM | Flow-Capturing Location Model |
| HWFET | Highway Fuel Economy Driving Schedule |
| LCA | Life-cycle assessment |
| ALPR | Automatic License Plate Recognition |
| DSRC | Dedicated Short-Range Communication |
| CSI | Channel state information |
| IEEE | Institute of Electrical and Electronics Engineers |
| IEC | International Electrotechnical Commissions |
| ISO | International Organization for Standardization |
| SELECT | Sustainable Electrified Transportation Center |
| PATH | Partners for Advanced Transit and Highways |
| FABRIC | feasibility analysis and development of on-road charging solutions for future electric vehicles |
| JEVS | Japan Electric Vehicle Association |
| UL | Underwriters Laboratories Inc. |
| Zurich ETH | Federal Institute of Technology Zurich |
References
- Mohammed, S.A.Q.; Jung, J.W. A Comprehensive State-of-the-Art Review of Wired/Wireless Charging Technologies for Battery Electric Vehicles: Classification/Common Topologies/Future Research Issues. IEEE Access 2021, 9, 19572–19585. [Google Scholar] [CrossRef]
- Jang, Y.J. Survey of the operation and system study on wireless charging electric vehicle systems. Transp. Res. Part C Emerg. Technol. 2018, 95, 844–866. [Google Scholar] [CrossRef]
- Machura, P.; Li, Q. A critical review on wireless charging for electric vehicles. Renew. Sustain. Energy Rev. 2019, 104, 209–234. [Google Scholar] [CrossRef]
- Panchal, C.; Stegen, S.; Lu, J. Review of static and dynamic wireless electric vehicle charging system. Eng. Sci. Technol. Int. J. 2018, 21, 922–937. [Google Scholar] [CrossRef]
- Ching, T.; Wong, Y. Review of wireless charging technologies for electric vehicles. In Proceedings of the 2013 5th International Conference on Power Electronics Systems and Applications (PESA), Hong Kong, China, 11–13 December 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1–4. [Google Scholar]
- Palani, G.; Sengamalai, U.; Vishnuram, P.; Nastasi, B. Challenges and Barriers of Wireless Charging Technologies for Electric Vehicles. Energies 2023, 16, 2138. [Google Scholar] [CrossRef]
- Okasili, I.; Elkhateb, A.; Littler, T. A review of wireless power transfer systems for electric vehicle battery charging with a focus on inductive coupling. Electronics 2022, 11, 1355. [Google Scholar] [CrossRef]
- Ahmad, A.; Khan, Z.A.; Saad Alam, M.; Khateeb, S. A review of the electric vehicle charging techniques, standards, progression and evolution of EV technologies in Germany. Smart Sci. 2018, 6, 36–53. [Google Scholar] [CrossRef]
- Chen, F.; Taylor, N.; Kringos, N. Electrification of roads: Opportunities and challenges. Appl. Energy 2015, 150, 109–119. [Google Scholar] [CrossRef]
- Brecher, A.; Arthur, D. Review and evaluation of wireless power transfer (WPT) for electric transit applications. FTA Rep. 2014. No. 0060. [Google Scholar] [CrossRef]
- Cirimele, V.; Diana, M.; Freschi, F.; Mitolo, M. Inductive Power Transfer for Automotive Applications: State-of-the-Art and Future Trends. IEEE Trans. Ind. Appl. 2018, 54, 4069–4079. [Google Scholar] [CrossRef]
- Hutin, M.; Leblanc, M. Transformer System for Electric Rails-Ways. U.S. Patent, 23 October 1894. Available online: https://patents.google.com/patent/US527857A/en (accessed on 18 May 2023).
- SAE J2954: Wireless Power Transfer for Light-Duty Plug-in/Electric Vehicles and Alignment Methodology; Surface Vehicle Information Report; SAE International: Warrendale, PA, USA, 2019.
- Li, H.L.; Covic, G.; Hu, P.A. A High Frequency AC-AC Converter for Inductive Power Transfer (IPT) Applications; IntechOpen: London, UK, 2012. [Google Scholar]
- Dai, J.; Ludois, D.C. Capacitive Power Transfer Through a Conformal Bumper for Electric Vehicle Charging. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 1015–1025. [Google Scholar] [CrossRef]
- Ludois, D.C.; Erickson, M.J.; Reed, J.K. Aerodynamic Fluid Bearings for Translational and Rotating Capacitors in Noncontact Capacitive Power Transfer Systems. IEEE Trans. Ind. Appl. 2014, 50, 1025–1033. [Google Scholar] [CrossRef]
- Kim, J.; Bien, F. Electric field coupling technique of wireless power transfer for electric vehicles. In Proceedings of the IEEE 2013 Tencon-Spring, Sydney, NSW, Australia, 17–19 April 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 267–271. [Google Scholar]
- Liu, C.; Hu, A.P.; Wang, B.; Nair, N.K.C. A capacitively coupled contactless matrix charging platform with soft switched transformer control. IEEE Trans. Ind. Electron. 2011, 60, 249–260. [Google Scholar] [CrossRef]
- Liu, C.; Hu, A.P.; Nair, N.K. Modelling and analysis of a capacitively coupled contactless power transfer system. IET Power Electron. 2011, 4, 808–815. [Google Scholar] [CrossRef]
- Leskarac, D.; Panchal, C.; Stegen, S.; Lu, J. PEV charging technologies and V2G on distributed systems and utility interfaces. Veh.-Link. Electr. Veh. Smart Grid 2015, 79, 157–209. [Google Scholar]
- Klontz, K.; Esser, A.; Bacon, R.; Divan, D.; Novotny, D.; Lorenz, R. An electric vehicle charging system with ’universal’ inductive interface. In Proceedings of the Conference Record of the Power Conversion Conference-Yokohama 1993, Yokohama, Japan, 19–21 April 1993; IEEE: Piscataway, NJ, USA, 1993; pp. 227–232. [Google Scholar]
- Musavi, F.; Eberle, W. Overview of wireless power transfer technologies for electric vehicle battery charging. IET Power Electron. 2014, 7, 60–66. [Google Scholar] [CrossRef]
- Wu, H.H.; Gilchrist, A.; Sealy, K.D.; Bronson, D. A High Efficiency 5 kW Inductive Charger for EVs Using Dual Side Control. IEEE Trans. Ind. Inform. 2012, 8, 585–595. [Google Scholar] [CrossRef]
- Zhu, Q.; Wang, L.; Guo, Y.; Liao, C.; Li, F. Applying LCC Compensation Network to Dynamic Wireless EV Charging System. IEEE Trans. Ind. Electron. 2016, 63, 6557–6567. [Google Scholar] [CrossRef]
- Khaligh, A.; Dusmez, S. Comprehensive Topological Analysis of Conductive and Inductive Charging Solutions for Plug-In Electric Vehicles. IEEE Trans. Veh. Technol. 2012, 61, 3475–3489. [Google Scholar] [CrossRef]
- Liu, N.; Habetler, T.G. A study of designing a universal inductive charger for electric vehicles. In Proceedings of the IECON 2013-39th Annual Conference of the IEEE Industrial Electronics Society, Vienna, Austria, 10–13 November 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 4528–4533. [Google Scholar]
- Neves, A.; Sousa, D.; Roque, A.; Terras, J. Analysis of an inductive charging system for a commercial electric vehicle. In Proceedings of the Proceedings of the 2011 14th European Conference on Power Electronics and Applications, Birmingham, UK, 30 August–1 September 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1–10. [Google Scholar]
- Peschiera, B.; Williamson, S.S. Review and comparison of inductive charging power electronic converter topologies for electric and plug-in hybrid electric vehicles. In Proceedings of the 2013 IEEE Transportation Electrification Conference and Expo (ITEC), Detroit, MI, USA, 16–19 June 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1–6. [Google Scholar]
- Wu, H.H.; Gilchrist, A.; Sealy, K.; Bronson, D. A 90 percent efficient 5kW inductive charger for EVs. In Proceedings of the 2012 IEEE Energy Conversion Congress and Exposition (ECCE), Raleigh, NC, USA, 15–20 September 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 275–282. [Google Scholar]
- Wu, H.H.; Gilchrist, A.; Sealy, K.; Israelsen, P.; Muhs, J. A review on inductive charging for electric vehicles. In Proceedings of the 2011 IEEE International Electric Machines & Drives Conference (IEMDC), Niagara Falls, ON, Canada, 15–18 May 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 143–147. [Google Scholar]
- Kosmanos, D.; Maglaras, L.A.; Mavrovouniotis, M.; Moschoyiannis, S.; Argyriou, A.; Maglaras, A.; Janicke, H. Route optimization of electric vehicles based on dynamic wireless charging. IEEE Access 2018, 6, 42551–42565. [Google Scholar] [CrossRef]
- Niu, S.; Xu, H.; Sun, Z.; Shao, Z.; Jian, L. The state-of-the-arts of wireless electric vehicle charging via magnetic resonance: Principles, standards and core technologies. Renew. Sustain. Energy Rev. 2019, 114, 109302. [Google Scholar] [CrossRef]
- Panchal, C.; Lu, J.; Stegen, S. Static in-wheel wireless charging systems for electric vehicles. Int. J. Sci. Technol. Res 2017, 6, 280–284. [Google Scholar]
- Vilathgamuwa, D.M.; Sampath, J. Wireless power transfer (WPT) for electric vehicles (EVS)—Present and future trends. In Plug In Electric Vehicles in Smart Grids: Integration Techniques; Springer: Berlin/Heidelberg, Germany, 2015; pp. 33–60. [Google Scholar]
- Borroni-Bird, C. Enabling Electric and Connected Vehicles. 2015. Available online: https://www.automotiveworld.com/articles/enabling-electric-connected-vehicles/ (accessed on 30 August 2023).
- Chawla, N.; Tosunoglu, S. State of the art in inductive charging for electronic appliances and its future in transportation. In Proceedings of the 2012 Florida Conference on Recent Advances in Robotics, Boca Raton, FL, USA, 10–11 May 2012; pp. 1–7. [Google Scholar]
- Li, W. High Efficiency Wireless Power Transmission at Low Frequency Using Permanent Magnet Coupling. Ph.D. Thesis, University of British Columbia, Vancouver, BC, Canada, 2009. [Google Scholar]
- Qiu, C.; Chau, K.; Liu, C.; Chan, C.C. Overview of wireless power transfer for electric vehicle charging. In Proceedings of the 2013 world electric vehicle symposium and exhibition (EVS27), Barcelona, Spain, 17–20 November 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1–9. [Google Scholar]
- Brown, W. The History of Power Transmission by Radio Waves. IEEE Trans. Microw. Theory Tech. 1984, 32, 1230–1242. [Google Scholar] [CrossRef]
- Zhang, Q.; Fang, W.; Liu, Q.; Wu, J.; Xia, P.; Yang, L. Distributed Laser Charging: A Wireless Power Transfer Approach. IEEE Internet Things J. 2018, 5, 3853–3864. [Google Scholar] [CrossRef]
- Zhang, Q.; Shi, X.; Liu, Q.; Wu, J.; Xia, P.; Liao, Y. Adaptive Distributed Laser Charging for Efficient Wireless Power Transfer. In Proceedings of the 2017 IEEE 86th Vehicular Technology Conference (VTC-Fall), Toronto, ON, Canada, 24–27 September 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Li, K.R.; See, K.Y.; Koh, W.J.; Zhang, J.W. Design of 2.45 GHz microwave wireless power transfer system for battery charging applications. In Proceedings of the 2017 Progress in Electromagnetics Research Symposium-Fall (PIERS-FALL), Singapore, 19–22 November 2017; pp. 2417–2423. [Google Scholar] [CrossRef]
- Mehrotra, R. Cut the Cord: Wireless Power Transfer, its Applications, and its limits. Available online: https://www.cse.wustl.edu/~jain/cse574-14/ftp/power/index.html (accessed on 29 December 2023).
- Summerer, L.; Purcell, O. Concepts for wireless energy transmission via laser. In Proceedings of the 2009 International Conference on Space Optical Systems and Applications (ICSOS), Miraikan, Tokyo, Japan, 4–6 February 2009; Available online: https://www.esa.int/gsp/ACT/doc/POW/ACT-RPR-NRG-2009-SPS-ICSOS-concepts-for-laser-WPT.pdf (accessed on 24 January 2024).
- Shinohara, N. Wireless power transmission progress for electric vehicle in Japan. In Proceedings of the 2013 IEEE Radio and Wireless Symposium, Austin, TX, USA, 20–23 January 2013; pp. 109–111. [Google Scholar] [CrossRef]
- Shinohara, N. Beam Efficiency of Wireless Power Transmission via Radio Waves from Short Range to Long Range. J. Korean Inst. Electromagn. Sci. 2010, 10, 224–230. [Google Scholar] [CrossRef]
- Batool, U.; Rehman, A.; Khalil, N.; Islam, M.; Afzal, M.U.; Tauqeer, T. Energy extraction from RF/ Microwave signal. In Proceedings of the 2012 15th International Multitopic Conference (INMIC), Islamabad, Pakistan, 13–15 December 2012; pp. 165–170. [Google Scholar] [CrossRef]
- Harrist, D.W. Wireless Battery Charging System using Radio Frequency Energy Harvesting. Doctoral Dissertation, University of Pittsburgh, Pittsburgh, PA, USA, 2004. [Google Scholar]
- Kalwar, K.A.; Mekhilef, S.; Seyedmahmoudian, M.; Horan, B. Coil design for high misalignment tolerant inductive power transfer system for EV charging. Energies 2016, 9, 937. [Google Scholar] [CrossRef]
- Shevchenko, V.; Husev, O.; Strzelecki, R.; Pakhaliuk, B.; Poliakov, N.; Strzelecka, N. Compensation Topologies in IPT Systems: Standards, Requirements, Classification, Analysis, Comparison and Application. IEEE Access 2019, 7, 120559–120580. [Google Scholar] [CrossRef]
- S, Y.; R, N.; Sathik Mohamed Ali, J.; Almakhles, D. A Comprehensive Review of the On-Road Wireless Charging System for E-Mobility Applications. Front. Energy Res. 2022, 10, 926270. [Google Scholar] [CrossRef]
- Budhia, M.; Covic, G.A.; Boys, J.T. Design and optimization of circular magnetic structures for lumped inductive power transfer systems. IEEE Trans. Power Electron. 2011, 26, 3096–3108. [Google Scholar] [CrossRef]
- Bhattacharya, S.; Tan, Y.K. Design of static wireless charging coils for integration into electric vehicle. In Proceedings of the 2012 IEEE Third International Conference on Sustainable Energy Technologies (ICSET), Kathmandu, Nepal, 24–27 September 2012; pp. 146–151. [Google Scholar] [CrossRef]
- Chen, W.; Liu, C.; Lee, C.H.T.; Shan, Z. Cost-Effectiveness Comparison of Coupler Designs of Wireless Power Transfer for Electric Vehicle Dynamic Charging. Energies 2016, 9, 906. [Google Scholar] [CrossRef]
- Shi, X.; Qi, C.; Qu, M.; Ye, S.; Wang, G.; Sun, L.; Yu, Z. Effects of coil shapes on wireless power transfer via magnetic resonance coupling. J. Electromagn. Waves Appl. 2014, 28, 1316–1324. [Google Scholar] [CrossRef]
- Aditya, K.; Sood, V.K.; Williamson, S.S. Magnetic Characterization of Unsymmetrical Coil Pairs Using Archimedean Spirals for Wider Misalignment Tolerance in IPT Systems. IEEE Trans. Transp. Electrif. 2017, 3, 454–463. [Google Scholar] [CrossRef]
- Covic, G.A.; Boys, J.T. Modern Trends in Inductive Power Transfer for Transportation Applications. IEEE J. Emerg. Sel. Top. Power Electron. 2013, 1, 28–41. [Google Scholar] [CrossRef]
- Ferraro, L. Design and Control of Inductive Power Transfer System for Electric Vehicle Charging. Ph.D. Thesis, Institut National Polytechnique de Toulouse—INPT, Toulouse, France, Università degli studi di Napoli Federico II, Naples, Italy, 2017. [Google Scholar]
- Ahmad, A.; Alam, M.S.; Chabaan, R. A Comprehensive Review of Wireless Charging Technologies for Electric Vehicles. IEEE Trans. Transp. Electrif. 2018, 4, 38–63. [Google Scholar] [CrossRef]
- Budhia, M.; Boys, J.T.; Covic, G.A.; Huang, C.Y. Development of a Single-Sided Flux Magnetic Coupler for Electric Vehicle IPT Charging Systems. IEEE Trans. Ind. Electron. 2013, 60, 318–328. [Google Scholar] [CrossRef]
- Ahmed, K.; Aamir, M.; Uddin, M.K.; Mekhilef, S. A new coil design for enhancement in misalignment tolerance of Wireless Charging System. In Proceedings of the 2015 IEEE Student Conference on Research and Development (SCOReD), Kuala Lumpur, Malaysia, 13–14 December 2015; pp. 215–219. [Google Scholar] [CrossRef]
- Sohn, Y.H.; Choi, B.H.; Lee, E.S.; Lim, G.C.; Cho, G.H.; Rim, C.T. General Unified Analyses of Two-Capacitor Inductive Power Transfer Systems: Equivalence of Current-Source SS and SP Compensations. IEEE Trans. Power Electron. 2015, 30, 6030–6045. [Google Scholar] [CrossRef]
- Li, H.L.; Hu, A.P.; Covic, G.A. A Direct AC–AC Converter for Inductive Power-Transfer Systems. IEEE Trans. Power Electron. 2012, 27, 661–668. [Google Scholar] [CrossRef]
- Qian, Z.; Yan, R.; Wu, J.; He, X. Full-Duplex High-Speed Simultaneous Communication Technology for Wireless EV Charging. IEEE Trans. Power Electron. 2019, 34, 9369–9373. [Google Scholar] [CrossRef]
- Yuan, Z.; Xu, H.; Han, H.; Zhao, Y. Research of smart charging management system for Electric Vehicles based on wireless communication networks. In Proceedings of the 2012 IEEE 6th International Conference on Information and Automation for Sustainability, Beijing, China, 27–29 September 2012; pp. 242–247. [Google Scholar] [CrossRef]
- Zhao, Y.; Xu, H.; Shen, Y.; Han, H.; Yuan, Z. Research of orderly charging control system for Electrical Vehicles based on Zigbee and GPRS networks. In Proceedings of the 2014 IEEE Conference and Expo Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), Beijing, China, 31 August–3 September 2014; pp. 1–5. [Google Scholar] [CrossRef]
- Ronanki, D.; Karneddi, H. Electric Vehicle Charging Infrastructure: Review, Cyber Security Considerations, Potential Impacts, Countermeasures, and Future Trends. IEEE J. Emerg. Sel. Top. Power Electron. 2024, 12, 242–256. [Google Scholar] [CrossRef]
- Corti, F.; Reatti, A.; Piccirilli, M.C.; Grasso, F.; Paolucci, L.; Kazimierczuk, M.K. Simultaneous Wireless Power and Data Transfer: Overview and Application to Electric Vehicles. In Proceedings of the 2020 IEEE International Symposium on Circuits and Systems (ISCAS), Seville, Spain, 12–14 October 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Liu, X.; Liu, C.; Han, W.; Pong, P.W.T. Design and Implementation of a Multi-Purpose TMR Sensor Matrix for Wireless Electric Vehicle Charging. IEEE Sensors J. 2019, 19, 1683–1692. [Google Scholar] [CrossRef]
- Jeong, S.Y.; Kwak, H.G.; Jang, G.C.; Choi, S.Y.; Rim, C.T. Dual-Purpose Nonoverlapping Coil Sets as Metal Object and Vehicle Position Detections for Wireless Stationary EV Chargers. IEEE Trans. Power Electron. 2018, 33, 7387–7397. [Google Scholar] [CrossRef]
- Ramezani, A.; Wang, S.; Perry, M. A Misalignment Tolerant Foreign Object Detection for EV Wireless Charging Applications. In Proceedings of the 2023 IEEE Wireless Power Technology Conference and Expo (WPTCE), San Diego, CA, USA, 4–8 June 2023; pp. 1–5. [Google Scholar] [CrossRef]
- Gong, W.; Wang, J.; Xiao, J.; Wu, X.; Mo, Y.; Wu, N. Metal Foreign Body Detection in EV WPT Based on Self-Excitation Oscillation. In Proceedings of the 2023 IEEE 6th International Conference on Automation, Electronics and Electrical Engineering (AUTEEE), Shenyang, China, 15–17 December 2023; pp. 61–65. [Google Scholar] [CrossRef]
- Nagendra, G.R.; Chen, L.; Covic, G.A.; Boys, J.T. Detection of EVs on IPT Highways. IEEE J. Emerg. Sel. Top. Power Electron. 2014, 2, 584–597. [Google Scholar] [CrossRef]
- Fisk, C. Some developments in equilibrium traffic assignment. Transp. Res. Part B Methodol. 1980, 14, 243–255. [Google Scholar] [CrossRef]
- Liu, H.; Wang, D.Z.W. Locating multiple types of charging facilities for battery electric vehicles. Transp. Res. Part B Methodol. 2017, 103, 30–55. [Google Scholar] [CrossRef]
- Manshadi, S.D.; Khodayar, M.E.; Abdelghany, K.; Üster, H. Wireless Charging of Electric Vehicles in Electricity and Transportation Networks. IEEE Trans. Smart Grid 2018, 9, 4503–4512. [Google Scholar] [CrossRef]
- Chen, Z.; He, F.; Yin, Y. Optimal deployment of charging lanes for electric vehicles in transportation networks. Transp. Res. Part B Methodol. 2016, 91, 344–365. [Google Scholar] [CrossRef]
- Chen, Z.; Liu, W.; Yin, Y. Deployment of stationary and dynamic charging infrastructure for electric vehicles along traffic corridors. Transp. Res. Part C Emerg. Technol. 2017, 77, 185–206. [Google Scholar] [CrossRef]
- Ko, Y.D.; Jang, Y.J. The Optimal System Design of the Online Electric Vehicle Utilizing Wireless Power Transmission Technology. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1255–1265. [Google Scholar] [CrossRef]
- Jeong, S.; Jang, Y.J.; Kum, D. Economic Analysis of the Dynamic Charging Electric Vehicle. IEEE Trans. Power Electron. 2015, 30, 6368–6377. [Google Scholar] [CrossRef]
- Jang, Y.J.; Jeong, S.; Ko, Y.D. System optimization of the On-Line Electric Vehicle operating in a closed environment. Comput. Ind. Eng. 2015, 80, 222–235. [Google Scholar] [CrossRef]
- Hwang, I.; Jang, Y.J.; Ko, Y.D.; Lee, M.S. System Optimization for Dynamic Wireless Charging Electric Vehicles Operating in a Multiple-Route Environment. IEEE Trans. Intell. Transp. Syst. 2018, 19, 1709–1726. [Google Scholar] [CrossRef]
- Liu, Z.; Song, Z. Robust planning of dynamic wireless charging infrastructure for battery electric buses. Transp. Res. Part C Emerg. Technol. 2017, 83, 77–103. [Google Scholar] [CrossRef]
- Church, R.; Velle, C.R. The Maximal Covering Location Problem. Pap. Reg. Sci. 1974, 32, 101–118. [Google Scholar] [CrossRef]
- Riemann, R.; Wang, D.Z.W.; Busch, F. Optimal location of wireless charging facilities for electric vehicles: Flow-capturing location model with stochastic user equilibrium. Transp. Res. Part C Emerg. Technol. 2015, 58, 1–12. [Google Scholar] [CrossRef]
- Hodgson, M.J. A Flow-Capturing Location-Allocation Model. Geogr. Anal. 1990, 22, 270–279. [Google Scholar] [CrossRef]
- Pantic, Z.; Bai, S.; Lukic, S.M. Inductively coupled power transfer for continuously powered electric vehicles. In Proceedings of the 2009 IEEE Vehicle Power and Propulsion Conference, Dearborn, MI, USA, 7–10 September 2009; pp. 1271–1278. [Google Scholar] [CrossRef]
- Lukic, S.; Pantic, Z. Cutting the Cord: Static and Dynamic Inductive Wireless Charging of Electric Vehicles. IEEE Electrif. Mag. 2013, 1, 57–64. [Google Scholar] [CrossRef]
- Stamati, T.E.; Bauer, P. On-road charging of electric vehicles. In Proceedings of the 2013 IEEE Transportation Electrification Conference and Expo (ITEC), Detroit, MI, USA, 16–19 June 2013; pp. 1–8. [Google Scholar] [CrossRef]
- Chopra, S.; Bauer, P. Driving Range Extension of EV With On-Road Contactless Power Transfer—A Case Study. IEEE Trans. Ind. Electron. 2013, 60, 329–338. [Google Scholar] [CrossRef]
- Shekhar, A.; Prasanth, V.; Bauer, P.; Bolech, M. Economic Viability Study of an On-Road Wireless Charging System with a Generic Driving Range Estimation Method. Energies 2016, 9, 76. [Google Scholar] [CrossRef]
- Bi, Z.; Song, L.; De Kleine, R.; Mi, C.C.; Keoleian, G.A. Plug-in vs. wireless charging: Life cycle energy and greenhouse gas emissions for an electric bus system. Appl. Energy 2015, 146, 11–19. [Google Scholar] [CrossRef]
- García-Vázquez, C.A.; Llorens-Iborra, F.; Fernández-Ramírez, L.M.; Sánchez-Sainz, H.; Jurado, F. Comparative study of dynamic wireless charging of electric vehicles in motorway, highway and urban stretches. Energy 2017, 137, 42–57. [Google Scholar] [CrossRef]
- Wang, Y.; Yuan, R.; Jiang, Z.; Zhao, S.; Zhao, W.; Huang, X. Research on Dynamic Wireless EV Charging Power Control Method Based on Parameter Adjustment according to Driving Speed. In Proceedings of the 2019 IEEE 2nd International Conference on Electronics Technology (ICET), Chengdu, China, 10–13 May 2019; pp. 305–309. [Google Scholar] [CrossRef]
- Razu, M.R.R.; Mahmud, S.; Uddin, M.J.; Islam, S.S.; Bais, B.; Misran, N.; Islam, M.T. Wireless Charging of Electric Vehicle While Driving. IEEE Access 2021, 9, 157973–157983. [Google Scholar] [CrossRef]
- Kumar, K.; Chowdary, K.V.V.S.R.; Nayak, B.; Mali, V. Performance Evaluation of Dynamic Wireless Charging System with the Speed of Electric Vehicles. In Proceedings of the 2022 IEEE 19th India Council International Conference (INDICON), Kochi, India, 24–26 November 2022; pp. 1–4. [Google Scholar] [CrossRef]
- Lewis, D.D.; Onar, O.; Galigekere, V.P.; Mohammad, M.; Ionel, D.M. Optimal Power Sharing Speed Compensation in On-road Wireless EV Charging Systems. In Proceedings of the 2023 IEEE Transportation Electrification Conference & Expo (ITEC), Detroit, MI, USA, 21–23 June 2023; pp. 1–5. [Google Scholar] [CrossRef]
- Jang, Y.J.; Jeong, S.; Lee, M.S. Initial Energy Logistics Cost Analysis for Stationary, Quasi-Dynamic, and Dynamic Wireless Charging Public Transportation Systems. Energies 2016, 9, 483. [Google Scholar] [CrossRef]
- Bansal, P. Charging of Electric Vehicles: Technology and Policy Implications. Technol. Assess. 2015, 6, 1–20. [Google Scholar]
- Bi, Z.; De Kleine, R.; Keoleian, G.A. Integrated Life Cycle Assessment and Life Cycle Cost Model for Comparing Plug-in versus Wireless Charging for an Electric Bus System. J. Ind. Ecol. 2017, 21, 344–355. [Google Scholar] [CrossRef]
- He, F.; Yin, Y.; Zhou, J. Integrated pricing of roads and electricity enabled by wireless power transfer. Transp. Res. Part C: Emerg. Technol. 2013, 34, 1–15. [Google Scholar] [CrossRef]
- Sarker, A.; Li, Z.; Kolodzey, W.; Shen, H. Opportunistic Energy Sharing Between Power Grid and Electric Vehicles: A Game Theory-Based Pricing Policy. In Proceedings of the 2017 IEEE 37th International Conference on Distributed Computing Systems (ICDCS), Atlanta, GA, USA, 5–8 June 2017; pp. 1197–1207. [Google Scholar] [CrossRef]
- Hussain, R.; Son, J.; Kim, D.; Nogueira, M.; Oh, H.; Tokuta, A.O.; Seo, J. PBF: A New Privacy-Aware Billing Framework for Online Electric Vehicles with Bidirectional Auditability. Wirel. Commun. Mob. Comput. 2017, 2017, e5676030. [Google Scholar] [CrossRef]
- Hussain, R.; Kim, D.; Nogueira, M.; Son, J.; Tokuta, A.; Oh, H. A New Privacy-Aware Mutual Authentication Mechanism for Charging-on-the-Move in Online Electric Vehicles. In Proceedings of the 2015 11th International Conference on Mobile Ad-hoc and Sensor Networks (MSN), Shenzhen, China, 16–18 December 2015; pp. 108–115. [Google Scholar] [CrossRef]
- Gill, J.S.; Bhavsar, P.; Chowdhury, M.; Johnson, J.; Taiber, J.; Fries, R. Infrastructure Cost Issues Related to Inductively Coupled Power Transfer for Electric Vehicles. Procedia Comput. Sci. 2014, 32, 545–552. [Google Scholar] [CrossRef]
- Jung, G.H. Installation of Road-Embedded Power Cable. In The On-Line Electric Vehicle: Wireless Electric Ground Transportation Systems; Suh, N.P., Cho, D.H., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 159–170. [Google Scholar] [CrossRef]
- Curtis, A.; Shahid Chowdhury Oni, M.S.; Inoue, S.; Kamineni, A.; Zane, R.; Flann, N. Generative Neural Network Approach to Designing Dynamic Inductive Power Transfer Systems. In Proceedings of the 2023 IEEE Wireless Power Technology Conference and Expo (WPTCE), San Diego, CA, USA, 4–8 June 2023; pp. 1–5. [Google Scholar] [CrossRef]
- Choi, B.G.; Kim, Y.S. New Structure Design of Ferrite Cores for Wireless Electric Vehicle Charging by Machine Learning. IEEE Trans. Ind. Electron. 2021, 68, 12162–12172. [Google Scholar] [CrossRef]
- Jeong, S.; Lin, T.H.; Tentzeris, M.M. A Real-Time Range-Adaptive Impedance Matching Utilizing a Machine Learning Strategy Based on Neural Networks for Wireless Power Transfer Systems. IEEE Trans. Microw. Theory Tech. 2019, 67, 5340–5347. [Google Scholar] [CrossRef]
- Corti, F.; Reatti, A.; Pugi, L.; Lozito, G.M.; Triviño-Cabrera, A.; Luchetti, L.; Zini, G. Evaluation of Additive Manufacturing for Wireless Power Transfer Applications. IEEE Trans. Ind. Electron. 2024, 71, 4586–4595. [Google Scholar] [CrossRef]
- Ramezani, A.; Narimani, M. A New Wireless EV Charging System With Integrated DC–DC Magnetic Element. IEEE Trans. Transp. Electrif. 2019, 5, 1112–1123. [Google Scholar] [CrossRef]
- Smiai, O.; Bellotti, F.; Gloria, A.D.; Berta, R.; Amditis, A.; Damousis, Y.; Winder, A. Information and Communication Technology Research Opportunities in Dynamic Charging for Electric Vehicle. In Proceedings of the 2015 Euromicro Conference on Digital System Design, Madeira, Portugal, 26–28 August 2015; pp. 297–300. [Google Scholar] [CrossRef]
- Shahbaz Nejad, B.; Roch, P.; Handte, M.; Marrón, P.J. A Driver Guidance System to Support the Stationary Wireless Charging of Electric Vehicles. In Advances in Visual Computing; Lecture Notes in Computer Science; Bebis, G., Yin, Z., Kim, E., Bender, J., Subr, K., Kwon, B.C., Zhao, J., Kalkofen, D., Baciu, G., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 319–331. [Google Scholar] [CrossRef]
- Bozhi; Mohamed, M.; Gilani, V.N.M.; Amjad, A.; Majid, M.S.; Yahya, K.; Salem, M. A Review of Wireless Pavement System Based on the Inductive Power Transfer in Electric Vehicles. Sustainability 2023, 15, 14893. [Google Scholar] [CrossRef]
- Li, F.; Li, Y.; Zhou, S.; Chen, Y.; Sun, X.; Deng, Y. Wireless power transfer tuning model of electric vehicles with pavement materials as transmission media for energy conservation. Appl. Energy 2022, 323, 119631. [Google Scholar] [CrossRef]
- Chen, F. 15-Inductive power transfer technology for road transport electrification. In Eco-Efficient Pavement Construction Materials; Woodhead Publishing Series in Civil and Structural Engineering; Pacheco-Torgal, F., Amirkhanian, S., Wang, H., Schlangen, E., Eds.; Woodhead Publishing: Sawston, UK, 2020; pp. 383–399. [Google Scholar] [CrossRef]
- Feng, Z.; Shimizu, O.; Sumiya, H.; Nagai, S.; Fujimoto, H.; Sato, M. Influence of Contamination Between Receiver Coil and Embedded Transmitter Coil for Dynamic Wireless Power Transfer System. In Proceedings of the 2021 IEEE PELS Workshop on Emerging Technologies: Wireless Power Transfer (WoW), San Diego, CA, USA, 1–4 June 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Jiang, H.; Brazis, P.; Tabaddor, M.; Bablo, J. Safety considerations of wireless charger for electric vehicles—A review paper. In Proceedings of the 2012 IEEE Symposium on Product Compliance Engineering Proceedings, Portland, OR, USA, 5–7 November 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, Q.; Li, W.; Kang, J.; Wang, Y. Electromagnetic Safety Evaluation and Protection Methods for a Wireless Charging System in an Electric Vehicle. IEEE Trans. Electromagn. Compat. 2019, 61, 1913–1925. [Google Scholar] [CrossRef]
- Miller, J.M.; Daga, A.W.; McMahon, F.J.; Schrafel, P.C.; Cohen, B.; Calabro, A.W. A Closely Coupled and Scalable High-Power Modular Inductive Charging System for Vehicles. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 3259–3272. [Google Scholar] [CrossRef]
- Mou, W.; Lu, M. Research on Shielding and Electromagnetic Exposure Safety of an Electric Vehicle Wireless Charging Coil. Prog. Electromagn. Res. C 2021, 117, 55–72. [Google Scholar] [CrossRef]
- Fors, K.; Linder, S.; Stenumgaard, P.; Wiklundh, K. Interference Risks from Wireless Power Transfer for Electric Vehicles. In Proceedings of the 2021 IEEE International Joint EMC/SI/PI and EMC Europe Symposium, Raleigh, NC, USA, 26 July–13 August 2021; pp. 559–563. [Google Scholar] [CrossRef]
- ISO/PAS 19363:2017; Electrically Propelled Road Vehicles—Magnetic Field Wireless Power Transfer—Safety and Interoperability Requirements. International Organization for Standardization (ISO): Geneva, Switzerland, 2017.
- Kalialakis, C.; Georgiadis, A. The regulatory framework for wireless power transfer systems. Wirel. Power Transf. 2014, 1, 108–118. [Google Scholar] [CrossRef]
- Kalialakis, C.; Collado, A.; Georgiadis, A. Regulations and Standards for Wireless Power Transfer Systems. In Wireless Power Transfer Algorithms, Technologies and Applications in Ad Hoc Communication Networks; Nikoletseas, S., Yang, Y., Georgiadis, A., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 161–181. [Google Scholar] [CrossRef]
- Cho, D.H. Regulatory and Safety Issues. In The On-line Electric Vehicle: Wireless Electric Ground Transportation Systems; Suh, N.P., Cho, D.H., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 347–379. [Google Scholar] [CrossRef]
- Japan Electric Vehicle Association Standards. Japan Electric Vehicle Association. 2003. Available online: http://www.evaap.org/pdf/jevs.pdf (accessed on 18 March 2024).
- IEEE Std C95.1-2005; (Revision of IEEE Std C95.1-1991). IEEE Standard for Safety Levels with Respect to Human Exposure to Radio Frequency Electromagnetic Fields, 3 kHz to 300 GHz. IEEE Standards Association (IEEE SA): Piscataway, NJ, USA, 2006; pp. 1–238. [CrossRef]
- Society of Automotive Engineers. SAE J2836/6: Use Cases for Wireless Charging Communication for EV; SAE International: Warrendale, PA, USA, 2013. [Google Scholar] [CrossRef]
- Society of Automotive Engineers. SAE J1773: SAE Electric Vehicle Inductively Coupled Charging; SAE International: Warrendale, PA, USA, 2014. [Google Scholar] [CrossRef]
- Society of Automotive Engineers. SAE J2847/6: Communication between Wireless Charged Vehicles and Wireless EV Chargers; SAE International: Warrendale, PA, USA, 2015. [Google Scholar] [CrossRef]
- ISO/IEC 15149-2:2015; Information Technology-Telecommunications and Information Exchange between Systems Magnetic Field Area Network (MFAN)—Part 2: In-band Control Protocol for Wireless Power Transfer. International Organization for Standardization (ISO): Geneva, Switzerland, 2015. Available online: https://www.iso.org/standard/62858.html#:~:text=Abstract,along%20with%20a%20stable%20network (accessed on 18 March 2024).
- Society of Automotive Engineers. SAE J1772: SAE Electric Vehicle and Plug in Hybrid Electric Vehicle Conductive Charge Coupler; SAE International: Warrendale, PA, USA, 2017. [Google Scholar] [CrossRef]
- International Electrotechnical Commission (IEC). Electric Vehicle Wireless Power Transfer (WPT) Systems—Part 1: General Requirements; IEC: Geneva, Switzerland, 2017. [Google Scholar]
- International Electrotechnical Commission (IEC). Wireless Power Transfer-Management—Part 2: Multiple Device Control Management; IEC: Geneva, Switzerland, 2017. [Google Scholar]
- International Electrotechnical Commission (IEC). WPT-Air Fuel Alliance Resonant Baseline System Specification (BSS); IEC: Geneva, Switzerland, 2017. [Google Scholar]
- Underwriters Laboratories Inc. (UL). UL Standard for safety: Wireless Power Transfer Equipment for Electric Vehicles; UL: Chicago, IL, USA, 2017. [Google Scholar]
- Shladover, S.E. The Roadway-Powered Electric Transit Vehicle-Progress and Prospects. Transp. Res. Rec. 1986, 1155, 28–36. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Study | Type of Review | Static Charging | Dynamic Charging | Vehicle Types | Practical Problems | Standards Discussed | References Year Range | Notes |
|---|---|---|---|---|---|---|---|---|
| [1] | Technical | Yes | Briefly | Light passenger BEVs | Yes | Yes | 1984–2020 | Focused on static charging |
| [2] | Operations and systems | Briefly | Yes | Light and heavy passenger BEVs and commercial buses | No | Briefly | 1974–2018 | Focused on dynamic charging |
| [3] | Technical and operations and systems | Yes | Yes | Light and heavy passenger BEVs and commercial buses | Yes | Yes | 1914–2019 | Effects of environmental agents are not discussed |
| [4] | Technical | Yes | Yes | Light passenger BEVs | Yes | Yes | 1990–2017 | Health and safety discussed as practical problems |
| [5] | Technical | Yes | No | - | No | No | 2000–2013 | Focused on WPT methods for static charging |
| [6] | Technical | Yes | Yes | Light and heavy passenger BEVs and commercial buses | Yes | Yes | 1863–2023 | - |
| [7] | Technical | Yes | Yes | - | Yes | Yes | 1894–2021 | - |
| [8] | Technical and operations and systems | Yes | Yes | Light passenger BEVs and commercial buses | Briefly | Yes | 1820–2017 | Communication systems, object detection, and effect of environmental agents are not discussed |
| This review | Technical and operations and systems | Yes | Yes | Light and heavy passenger BEVs and commercial buses | Yes | Yes | 1894–2023 | Comprehensive—includes all points of discussion and fills in the gaps left by other surveys |
| WPT | Energy Transfer | Efficiency | Frequency (kHz) | Power (kW) | EMI | Complexity | Price |
|---|---|---|---|---|---|---|---|
| CPT | Electric | Low | 100–600 | 2–7 | Medium | Medium | Low |
| IPT | EM | Medium | 10–50 | 3–50 | Medium | Medium | Medium |
| MGWPT | Magnetic or Mechanical | Low | 0.05–0.5 | 1–3 | High | High | High |
| RIPT | EM | High | 10–150 | 3–100 | Low | Medium | Medium |
| Far-field | EM | Low | 1000– | 10–30 | - | High | High |
| Year | Standard(s) | Issuing Organization | Description |
|---|---|---|---|
| 2000 | G106 [127] | Japan Electric Vehicle Association | Inductive Charging for EVs—General |
| (JEVS) | Requirements | ||
| G107 [127] | Inductive Charging for EVs—Manual Connection | ||
| 2001 | G108 [127] | Japan Electric Vehicle Association | Inductive Charging for EVs—Software Interface |
| (JEVS) | |||
| G109 [127] | Inductive Charging for EVs—General | ||
| Requirements | |||
| 2006 | C95.1 [128] | Institute of Electrical and Electronics | Respect to Human Exposure to Radio Frequency |
| Engineers (IEEE) | (3 kHz–300 GHz) Electromagnetic Fields | ||
| 2013 | J2836/6 [129] | Society for Automotive Engineers (SAE) | Use Cases for Wireless Charging Communication |
| for EV | |||
| 2014 | J1773 [130] | Society for Automotive Engineers (SAE) | EV Inductively Coupled Charging |
| 2015 | J2847/6 [131] | Society for Automotive Engineers (SAE) | Communication Between Wireless Charged |
| Vehicles and Wireless EV Chargers | |||
| 15149-2 | International Electro-mechanical | Information Technology—Telecommunications | |
| (ISO-IEC) [132] | Commission (IEC) | and Information Exchange Between Systems– | |
| Magnetic Field Area Network (MFAN)—Part 2: | |||
| In-band Control Protocol for WPT | |||
| 2017 | J2954 [13] | Society for Automotive Engineers (SAE) | Wireless Power Transfer for Light-Duty Plug-In |
| EVs and Alignment Methodology | |||
| J1772 [133] | EV/PHEV Conductive Charge Coupler (CCC) | ||
| P2100.1 | Institute of Electrical and Electronics | Wireless Power and Charging Systems | |
| Engineers (IEEE) | |||
| 61980-1 [134] | International Electro-mechanical | EV WPT Systems Part-1: General | |
| Cor.1 Ed.1.0 | Commission (IEC) | Requirements | |
| 62827-2 Ed.1.0 [135] | WPT-Management: Part 2: Multiple Device | ||
| Control Management (MDCM) | |||
| 63,028 Ed.1.0 [136] | WPT-Air Fuel Alliance Resonant Baseline | ||
| System Specification (BSS) | |||
| Subject 2750 [137] | Underwriters Laboratories | Outline of Investigation, for WEVCS | |
| Inc. (UL), Chicago, IL | |||
| 19363 [123] | International Organization for | Electrically Propelled Road Vehicles—Magnetic | |
| Standardization (ISO) | Field WPT—Safety and Interoperability | ||
| Requirements |
| Research Group(s) | Notes | Type | Frequency | Air Gap | Power | Efficiency |
|---|---|---|---|---|---|---|
| (kHz) | (mm) | (kW) | (%) | |||
| KAIST | Research into static | Car | 20 | 10 | 3 | 88 |
| and dynamic charging | Train | 60 | 120–200 | 15 | 74 | |
| systems | Bus | 20 | 170 | 6 | 72 | |
| University of | Car | 60 | 200 | 1 | 83 | |
| Auckland | ||||||
| Qualcomm | Publicly demonstrated | Race Car | 85 | 20 | More than 90 | |
| stationary charging and prototyping dynamic charging | Car | 85 | 160–200 | 3.3 and 6.6 | 90 | |
| Oak Ridge | Static and dynamic | Car | 20 | 100–160 | 3.3 and 6.6 | 90 |
| National Laboratory (ORNL) | charging systems | Car | 22–23 | 162 | 20 and 120 | 93 |
| EV System Lab and Nissan Research Centre | 90 | 100 | 1 | More than 90 | ||
| Utah State University | Research into dynamic charging systems | Bus | 20 | 150 | 25 | 86 |
| Zurich ETH | 85 | 52 | 50 | 96 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rabih, M.; Takruri, M.; Al-Hattab, M.; Alnuaimi, A.A.; Bin Thaleth, M.R. Wireless Charging for Electric Vehicles: A Survey and Comprehensive Guide. World Electr. Veh. J. 2024, 15, 118. https://doi.org/10.3390/wevj15030118
Rabih M, Takruri M, Al-Hattab M, Alnuaimi AA, Bin Thaleth MR. Wireless Charging for Electric Vehicles: A Survey and Comprehensive Guide. World Electric Vehicle Journal. 2024; 15(3):118. https://doi.org/10.3390/wevj15030118
Chicago/Turabian StyleRabih, Mohammad, Maen Takruri, Mohammad Al-Hattab, Amal A. Alnuaimi, and Mouza R. Bin Thaleth. 2024. "Wireless Charging for Electric Vehicles: A Survey and Comprehensive Guide" World Electric Vehicle Journal 15, no. 3: 118. https://doi.org/10.3390/wevj15030118
APA StyleRabih, M., Takruri, M., Al-Hattab, M., Alnuaimi, A. A., & Bin Thaleth, M. R. (2024). Wireless Charging for Electric Vehicles: A Survey and Comprehensive Guide. World Electric Vehicle Journal, 15(3), 118. https://doi.org/10.3390/wevj15030118