1. Introduction
With the rapid development of autonomous driving technology, safety concerns are gradually garnering widespread attention. Within this trend, adverse weather conditions have gradually emerged as a prominent factor impacting road traffic safety [
1]. Recent relevant studies have indicated [
2] that up to 75% of annual traffic accidents occur on wet and slippery road surfaces. This has presented even more formidable challenges for autonomous vehicles. Particularly in rainy weather conditions, rapid lane change behavior is often liable to cause accidents such as side scraping and rear−end collisions [
3]. Analyzing the causes of accidents, we found that rainfall leads to a decrease in the road surface adhesion coefficient, which affects the vehicle’s grip on wet and slippery road surfaces and has an impact on the vehicle’s stability, thus reducing the braking performance and extending the emergency braking distance; concurrently, rainfall reduces driver visibility, thereby affecting the driver’s field of vision for safe operation and increasing reaction times [
4].
However, within the current research landscape, most of the studies within the crucial domain of lane change motion planning have not adequately addressed the impact of adverse weather conditions on motion planning. To mitigate uncertainties during autonomous vehicle operation and to enhance driving safety, it is imperative to incorporate the potential risks arising from environmental factors into the pivotal domain of motion planning [
5].
Currently, the trajectory planning for autonomous vehicles is rooted in mobile robot path planning techniques. To adapt a multitude of autonomous navigation techniques to the domain of autonomous driving and to make the corresponding improvements, considerations are given to road network structures and traffic rule constraints [
6]. According to the application methods of the planning techniques in autonomous driving, these methods can be roughly categorized into five classes: graph search methods, potential field methods, interpolation methods, sampling methods, and numerical optimization methods [
7].
Among them, graph search−based planning algorithms describe the location of an object based on the grid it occupies by rasterizing or meshing the state space of the environment and deriving a route of movement based on the traversal of the state space [
8]. However, related algorithms such as Dijkstra, A*, and D*, to name a few [
9], plan paths that are not necessarily optimal and do not take into account road geometry constraints or poor trajectory smoothing. Based on potential field methods, the planning approach introduces the concept of potential fields. It abstracts the vehicle’s motion as the movement of a vector field, assigning attractive fields to safe areas for the vehicle and repulsive fields to obstacles. The vehicle’s future trajectory is planned by calculating the resultant force field it experiences [
10]. However, these methods depend on accurately modeling the surrounding environment, which can lead to local optima. To compensate for this deficiency, Yang W [
11] proposed an improved automatic obstacle avoidance method combining A* and artificial potential fields to solve the planning and tracking problems of autonomous vehicles in road environments.
Because of the limitations of the potential field method, researchers have also introduced interpolation−based planning algorithms [
12]. This method utilizes geometric curves as its foundation, interpolating intermediate nodes based on known starting and ending points to generate smooth trajectories. This results in generated lane change trajectories possessing continuous curvature and ensuring that the vehicle reaches its destination at the desired speed and posture [
13]. In their study, Zeng et al. employed third−order B−spline curves for lane change trajectory planning. By simultaneously considering the constraints of the host vehicle, they achieved the generation of ideal trajectories [
14]. However, this approach requires the appropriate interpolation density, as interpolation which is too low can impact accuracy and lead to local errors, while excessively high interpolation can affect real−time computation. Currently, methods capable of performing motion planning tasks on structured roads can be classified into two categories: sampling−based methods and numerical optimization−based methods [
15]. Sampling−based methods offer an intuitive way to express complex abstract spaces and find globally optimal solutions in discretized intricate road environments [
16]. Conversely, numerical optimization−based methods capitalize on precise modeling, rapidly converging to minimal values through numerical optimization to identify local optimal solutions [
17]. Consequently, the motion planning solutions of most advanced autonomous vehicles leverage the strengths of these two methods, establishing a hierarchical framework involving sampling followed by optimization [
18].
B. Li et al. proposed a layered trajectory planning framework that combines sampling and numerical optimization. The upper- −level planner samples rough trajectories, while the lower−level planner refines trajectories using numerical optimization methods [
19]. This approach formulates the trajectory generation problem as an optimal control problem, employing numerical optimization to solve multi−objective functions and obtain trajectories that are continuous, comfortable, and collision−free, while adhering to various constraints [
20]. Furthermore, to enhance the operational limits of autonomous vehicles, Chen et al. devised a hierarchical dynamic drifting controller (HDDC) which, through the implementation of drifting and cornering maneuvers, achieves trajectory tracking control within and beyond the confines of stability limits [
21]. Additionally, Zhang et al. introduced a synchronous planning and control scheme that obviates the necessity for explicit trajectory planning and instead determines control inputs based solely on relevant control objectives and safety constraints [
22]. In a different vein, Chen et al. addressed FWIC−EV chassis control strategy, proposing a comprehensive control strategy predicated on slip control. Specifically tailored for regular driving conditions, this strategy aims to minimize tire slip power loss and bolster the efficacy of the anti−slip braking system [
23]. Considering the impact of environmental factors, Yu et al. [
24] introduced an active perception algorithm that explores the surrounding environment through a loop between perception and trajectory generation. This aims to reduce uncertainties and risks in the environment [
25]. Wang et al. incorporated visibility prediction into trajectory planning, introducing a risk metric based on predicted visibility to penalize trajectories with high speed and low visibility [
26]. Li Z et al. addressed lane change scenarios on wet and slippery road surfaces, introducing a longitudinal safety model to assess safety before and after lane changes and to mitigate issues related to lateral slip through tire slip angle evaluation [
27]. The aforementioned references primarily focus on enhancing vehicle stability from the perspective of vehicle tracking control. Alternatively, within a phase of trajectory planning, the emphasis is solely placed on ensuring the safety of vehicle operation on wet and slippery road surfaces, thereby resulting in an excessively cautious generation of the target trajectory.
Therefore, the primary focus of this study is to generate safer and more stable lane change trajectories on low−adhesion wet and slippery road surfaces. Firstly, based on the improved minimum safe distance, this paper introduces safety distance constraints for rainy weather scenarios and the boundaries of lane change feasible regions. Secondly, within the framework of a layered trajectory planning approach, a visibility cost function and improved safety distance constraints are incorporated into the dynamic planning process. Finally, a quadratic programming algorithm is employed to introduce a vehicle stability objective function, resulting in optimal lane change trajectories that ensure continuity, stability, and collision−free operation. The specific tasks undertaken in the remainder of this paper are as follows:
Section 2 quantitatively analyzes the impact of rainfall on lane change behavior, proposing safety distance and lane change feasible region boundaries for rainy weather scenarios. Within the sampling−based, followed by the optimization−based, layered trajectory framework,
Section 3 introduces the visibility cost function and the vehicle stability objective function.
Section 4 presents the design of the lateral LQR controller and the longitudinal DPID controller to verify the effectiveness of the algorithm.
Section 5 presents the simulation results and analysis.
Section 6 summarizes the contributions and limitations of this paper, discussing future research directions and challenges.
4. Trajectory Tracking Control
Driving in rainy weather is frequently affected by factors such as slippery roads and reduced traction; this makes lateral stability and longitudinal speed and position control of the vehicle critical. Therefore, in this paper, the lateral LQR controller and the longitudinal DPID controller are used to implement the trajectory tracking control [
12], although the parameter settings of these two controllers are complex and computationally expensive. However, they have better stability and can reduce the risk of sideslip and loss of control. In addition, they are adaptable and robust in unstable environments. For trajectory tracking control, the focus is on the lateral motion of the vehicle. In order to simplify the calculation, a two−degrees−of−freedom vehicle dynamics model is used in this paper [
15].
where
ay is the acceleration along the body coordinate
y direction at the center of mass of the vehicle;
m is the mass of the vehicle;
Fyf and
Fyr are the combined lateral forces on the front and rear axle tires, respectively;
Iz is the rotational moment of inertia of the vehicle around the
z-axis of the center of mass;
ω is the yaw rate of the vehicle;
lr and
lf are the distances from the vehicle’s center of mass to the front and rear axles of the vehicle;
cf and
cr are the lateral deflection stiffnesses of the tires on the front and rear axles of the vehicle, respectively; and
δf is the front wheel angle.
Lateral and heading errors are mainly considered when the vehicle performs tracking to control the reference trajectory [
21]. The error state space equation is expressed as:
where
ey is the lateral error;
is the lateral velocity error;
eφ is the heading angular error; and
is the heading angular rate error. By designing a control step of
T and utilizing a discrete LQR controller, the system is controlled based on its state−space equations [
12]:
where
Ad = (
I −
TA/2)
−1(
I +
TA/2);
Bd =
TB;
x(
k) represents the system state at time
k; and
u(
k) denotes the control input at time
k [
17]. When performing tracking control, the controller’s objective is not only to reduce trajectory tracking errors but also to minimize the control effort, thus ensuring stable vehicle operation. Therefore, the objective function of the LQR controller is defined as follows:
where
x represents the state variables,
u represents the control variables,
Q is the weight matrix for the state variables, and
R is the weight matrix for the control variables. Assuming
K is the control gain matrix of the discrete LQR controller, there exists a matrix
p that stabilizes the system’s state space. This can be derived as follows:
P = −
ATPB(
R +
BTPB)
−1BTPA +
ATPA +
Q is the positive definite solution of the Riccati equation; the longitudinal trajectory tracking control is mainly based on the literature [
20] on the design of the longitudinal dual PID controller, the position PID controller, and the velocity PID controller for the transverse and longitudinal synergistic tracking control of the change in track trajectory.
5. Discussion
This subsection primarily delves into the simulation conclusions. In order to validate the effectiveness of the algorithm proposed in this paper, simulations were conducted on the joint simulation platform of MATLAB R2020, Carsim, and PreScan. These simulations were executed on a 12th Gen Intel Core i7−12700H CPU, which possesses 16.0 GB RAM, running at 2.30 GHz under Microsoft Windows 11. In this simulation, MATLAB R2020 provides the algorithmic model, Carsim contributes the dynamics model, and PreScan constructs the environmental scenarios. The trajectory−tracking controller tracks the entire trajectory. The simulation key parameters are set as shown in
Table 1.
In the simulation environment configuration, we chose a heavy rain scenario with a traffic accident occurrence rate accounting for 60% [
1]. Within this scenario, rainfall intensity ranges from 25 to 49.9 mm over a 24 h period. According to information from reference [
7], the road surface friction coefficient for this scenario is established as
φ = 0.3. Employing Formula (4), the delay response time is calculated to be
tf = 1.221 s. For the simulation setup, the ego vehicle is represented by a red rectangular block, designated with a velocity of
vego = 10 m/s. The surrounding obstacle vehicles are depicted as blue rectangular blocks, with a set velocity of
vobs = 5 m/s.
We present two randomly generated simulation scenarios, as illustrated in
Figure 13 and
Figure 14. From these scenarios, it can be observed that considering visibility cost and neglecting visibility cost can lead to the generation of entirely distinct trajectories. Through thorough comparative analysis, we can discern that the incorporation of more accurate rainy day lane change boundary conditions, the establishment of feasible rainy day lane change regions, and the introduction of visibility cost functions during the dynamic programming phase collectively contribute to the observed differences.
In the lane change process spanning 0 m to 20 m, trajectories accounting for visibility cost exhibit a more conservative and secure nature when compared to trajectories disregarding visibility cost. On the other hand, during the lane change and collision avoidance phase spanning 20 m to 40 m, the integration of an enhanced safety distance constraint within the collision avoidance cost function often leads the ego vehicle to exhibit a tendency to distance itself from surrounding vehicles. This outcome aligns more closely with the experiential and behavioral habits of human drivers.
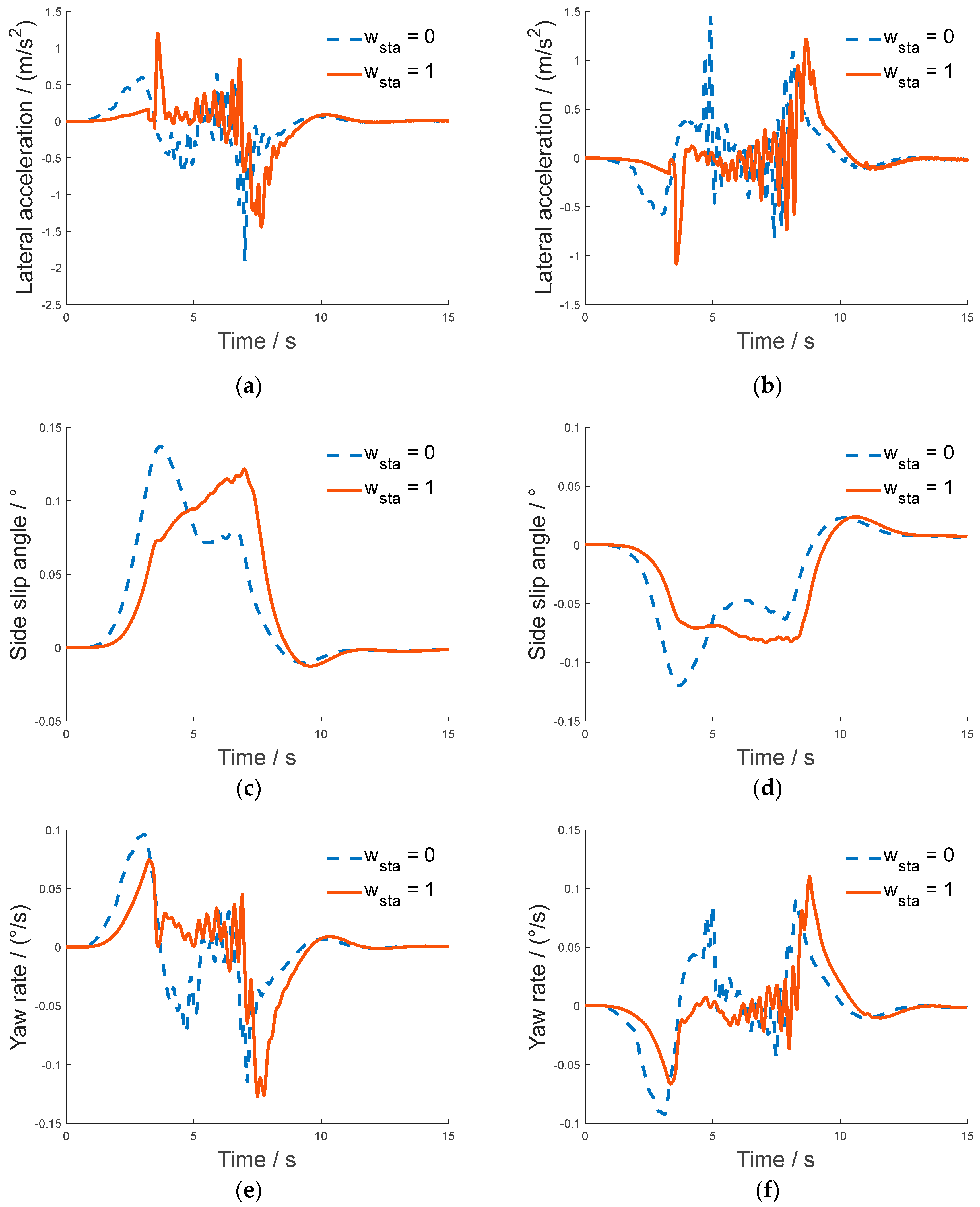
While focusing on the safety of lane changing under rainy conditions, comfort and maneuverability are of equal importance in vehicle lane change maneuvers. Therefore, in order to verify whether the algorithm generates trajectories with higher maneuverability and stability, this study shows the profiles of the vehicle states with or without considering the maneuverability objective function for both the left and right lane change scenarios under rainy conditions, as shown in
Figure 15.
When assessing stability, lateral acceleration emerges as a pivotal evaluation metric, as manifested in
Figure 15a,b. Throughout the lane change process, lateral acceleration consistently oscillates within the range of ±1.5 m/s
2. Thorough comparative analysis reveals that, with the introduction of a stability objective function during the quadratic programming phase, which is notably evident in the left/right lane change scenarios, the vehicle’s lateral acceleration curve exhibits a more pronounced reduction trend. Specifically, the peak lateral acceleration experiences a decrease of approximately 1 m/s
2 compared to the scenario where the stability objective function is not considered.
Furthermore, we investigated the sideslip angle in different scenarios, as depicted in
Figure 15c,d. The variation in the sideslip angle reflects the extent of deviation between the vehicle’s travel direction and the road direction. In both lane change scenarios, the sideslip angle consistently oscillates within the range of ±0.15°. Notably, when considering the stability objective function, the sideslip angle curve exhibits smaller peaks in comparison to the scenario where stability considerations were absent, oscillating within the range of approximately ±0.1°. This indicates that the incorporation of the stability objective function during rainy day lane changing results in smoother fluctuations of the sideslip angle, contributing to an overall smoother lane change process.
In addition, the yaw rate serves as a vital parameter for assessing stability and comfort during the lane change process. As depicted in
Figure 15e,f, the yaw rate curve remains within the range of ±0.1°/s throughout the entire process. In particular, at around 5 s, the yaw rate curve, influenced by the introduction of the stability objective function, exhibits a noticeable reduction in peak values. This implies that the incorporation of the stability objective function leads to a more stable yaw rate throughout the lane change process, thereby enhancing passenger comfort and overall stability.
6. Conclusions
In this paper, we introduce a trajectory planning algorithm for the lane changing of autonomous vehicles in rainy day scenarios for the safety and stability of the lane change operation of autonomous vehicles under adverse weather conditions.
(1) Introduction of friction coefficient and delayed reaction time. In this study, we first consider the slippery condition of the road on rainy days and introduce the friction coefficient and delayed reaction time as the key factors, to accurately calculate the safe distance for following and the safe distance for changing lanes and thereby to establish the boundaries of the feasible domain of lane changing on rainy days.
(2) Introduction of visibility cost function and improvement of safety distance constraints. A hierarchical trajectory planning strategy is adopted and dynamic programming is used to search for rough trajectories to obtain robust and safe initial solutions.
(3) The operation stability objective function is introduced. For the sideslip problem on a wet and slippery road, the quadratic programming algorithm is improved with the introduction of the stability objective function, which improves the smoothness of vehicle traveling and effectively reduces the potential risk of sideslip.
The simulation results show that the algorithm makes the host vehicle generate more conservative and safe trajectories in bad weather. It is more inclined to move away from the surrounding vehicles during the lane change obstacle avoidance phase. Meanwhile, the lateral acceleration varies within the range of ±1.5 m/s2, the sideslip angle fluctuates within the range of ±0.15°, and the yaw rate is kept within the range of ±0.1°/s, fulfilling the requirements of comfort and stability. In this paper, although the environment and other influencing factors are considered, there is no real vehicle test under severe weather, and there are still complex weather environment situations that have not been considered. In the future, the lane change problem under different severe weather conditions can be investigated and more parameters and strategies can be explored to maintain the adaptability of the algorithm in diverse weather conditions. Additionally, in this paper, we only consider the host vehicle and the surrounding obstacle vehicles at a constant speed; in the next stage of research, we will consider the surrounding obstacle vehicles as having a variable speed in the speed planning stage of the host vehicle in order to adapt to more complex driving scenarios.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}