
Research on Regenerative Braking Control Strategy for Single-Pedal Pure Electric Commercial Vehicles

Abstract
:1. Introduction
2. Formulation of Single-Pedal Control Strategy
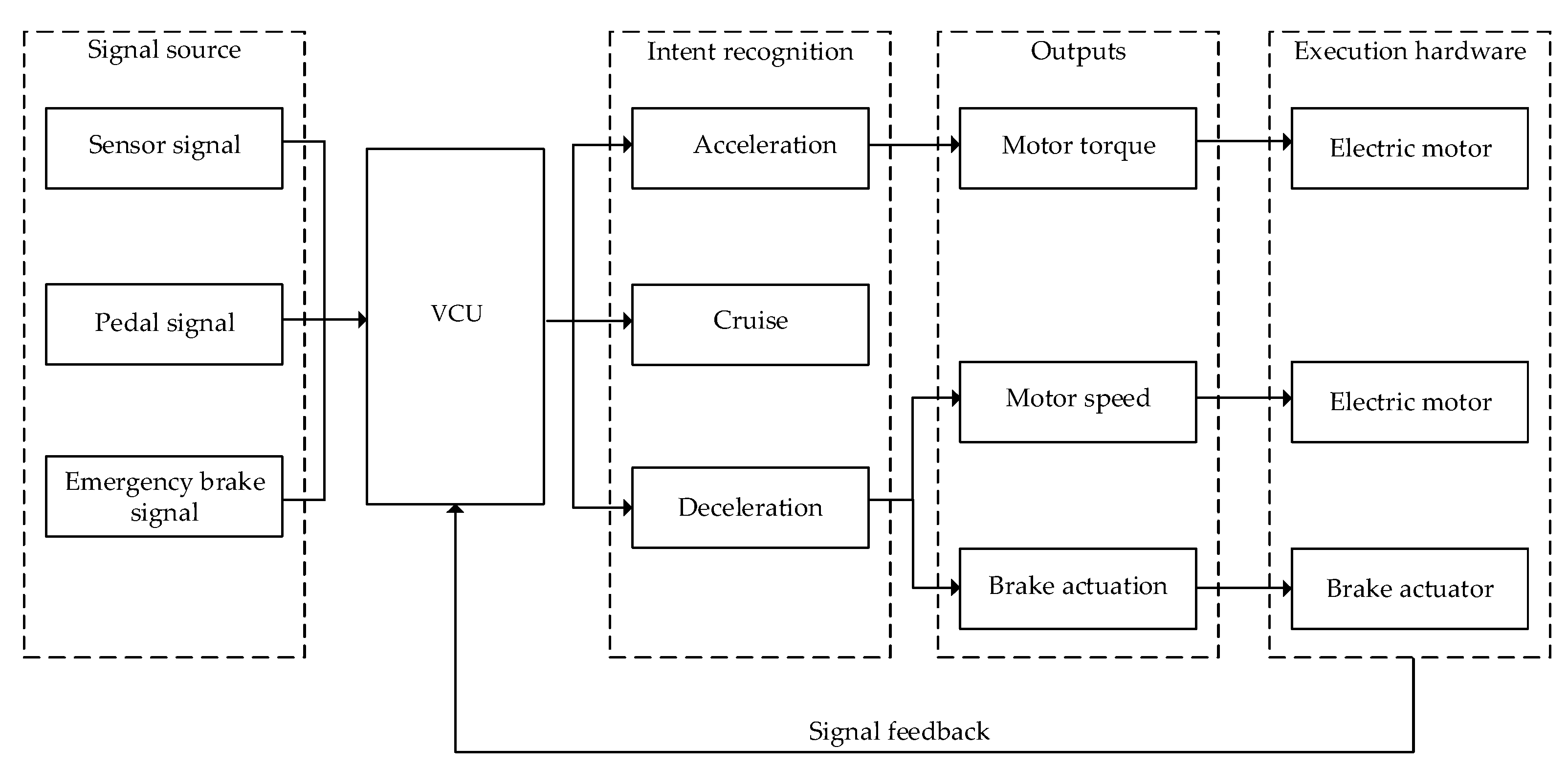
2.1. Overall Framework of Single-Pedal Control Strategy
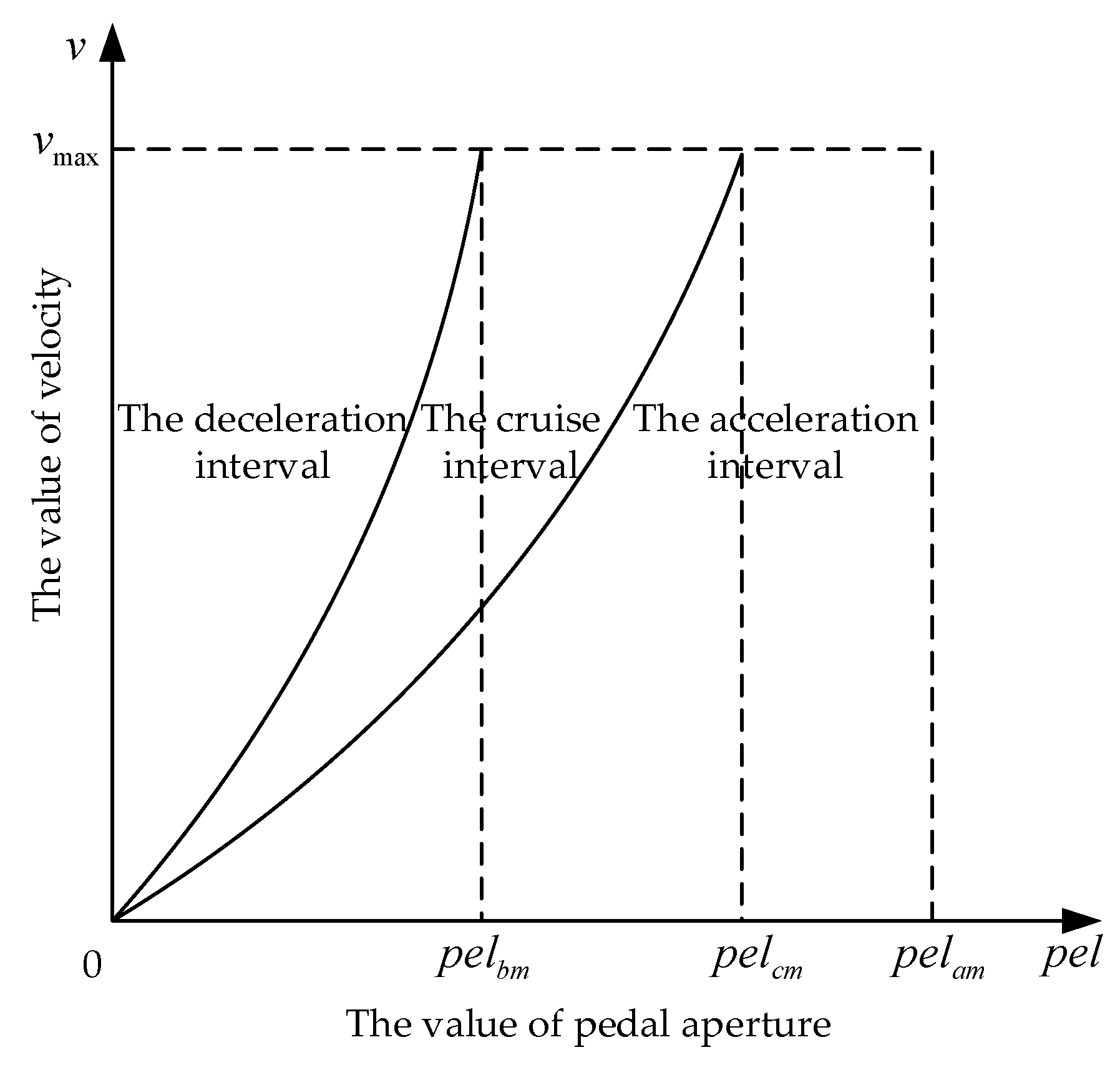
2.2. Driver Intention Recognition
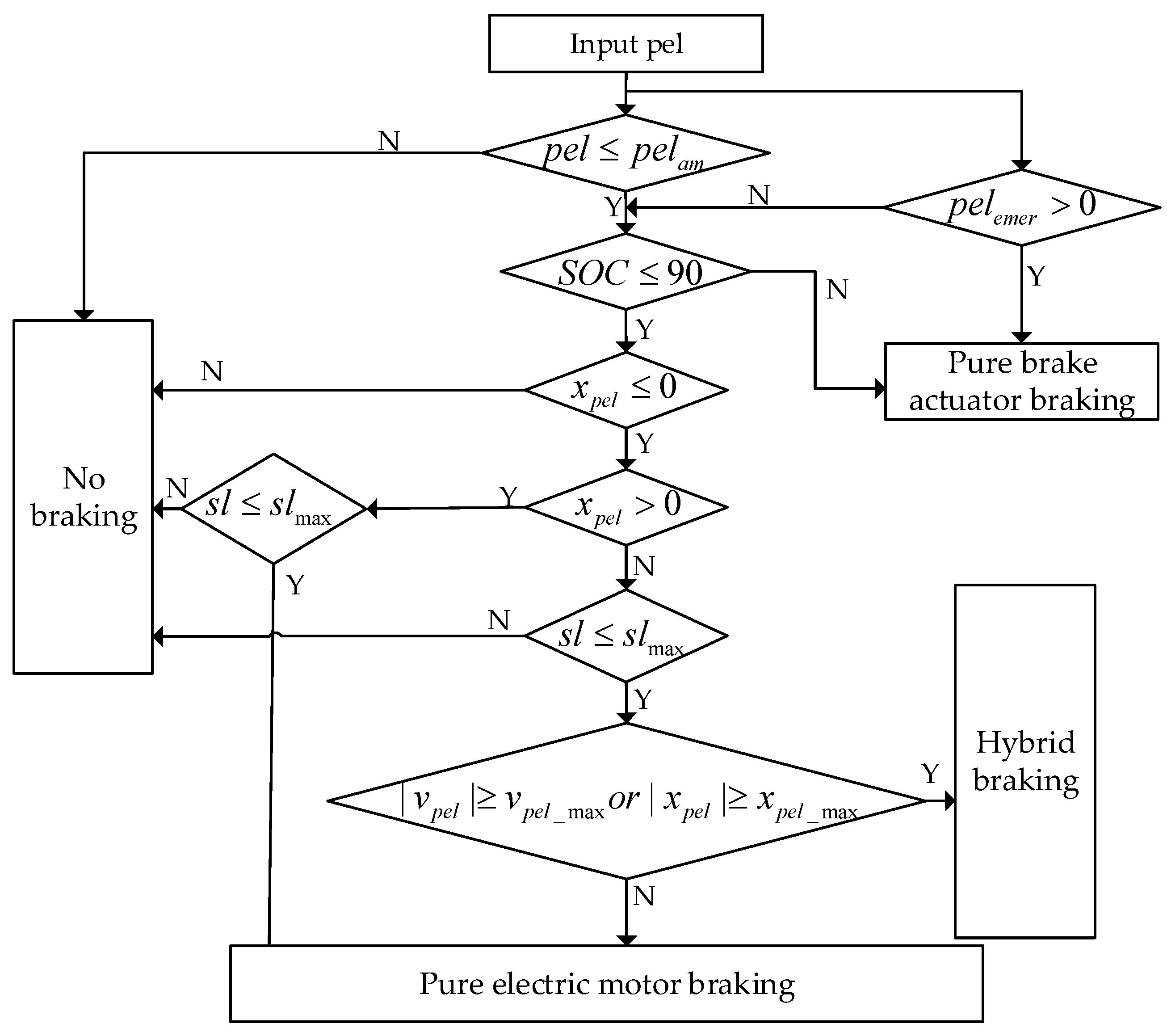
2.3. Braking Classification Based on the Single Pedal
3. Formulation of Single-Pedal Regenerative Braking Strategy
3.1. Regenerative Braking Principle
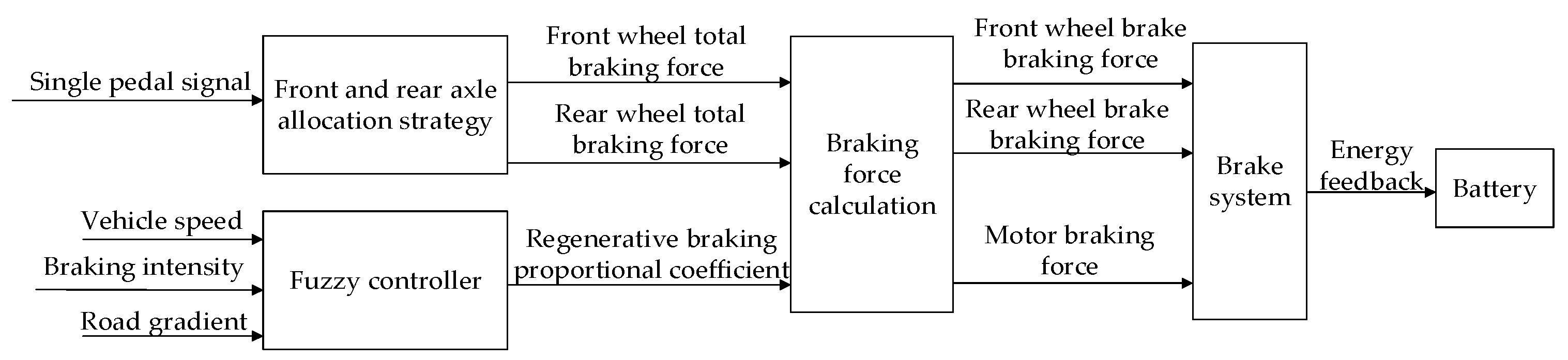
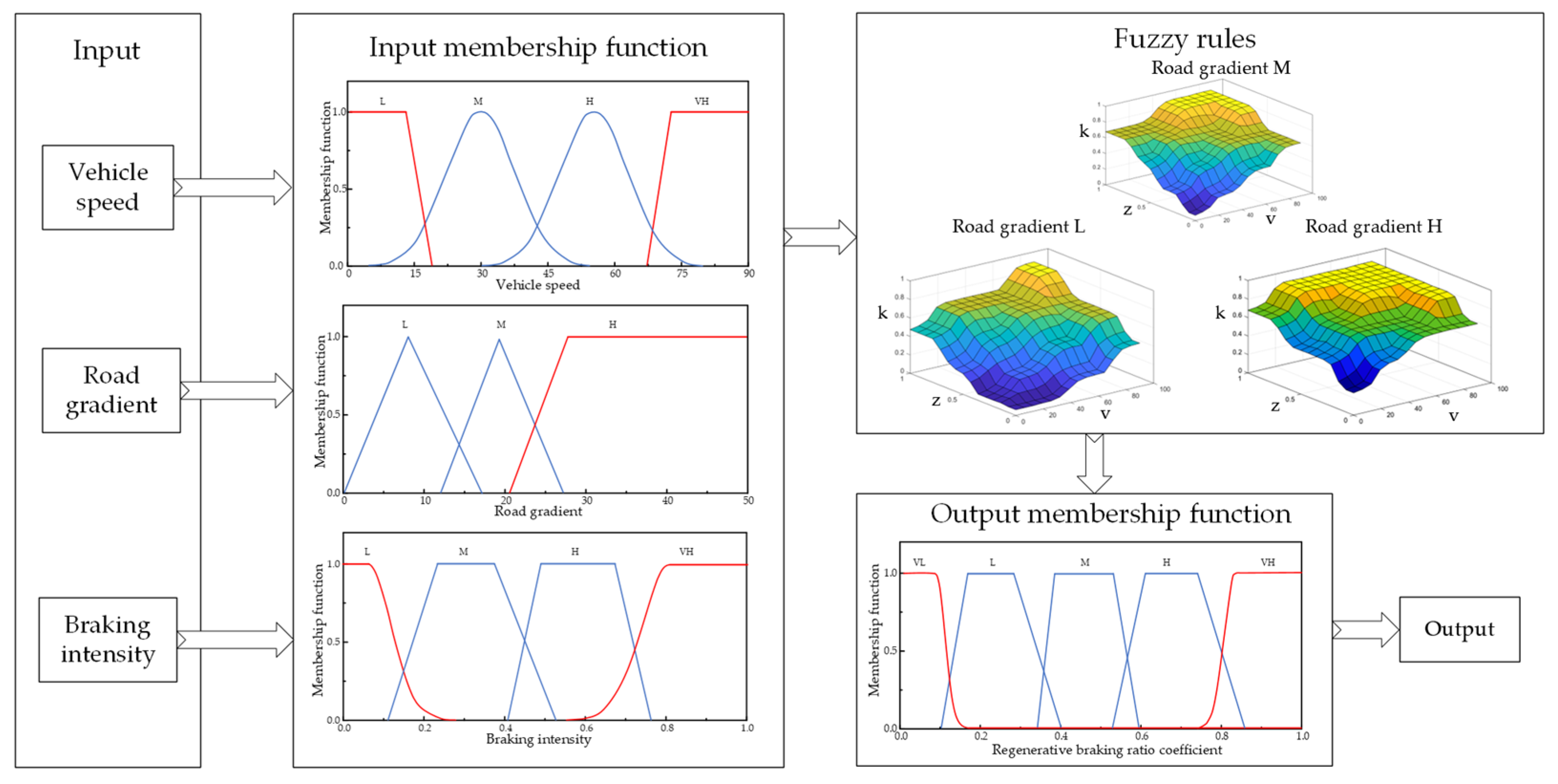
3.2. Formulated Based on the Single-Pedal Braking Strategy
3.3. Hybrid Braking
4. Simulation and Real Vehicle Validation
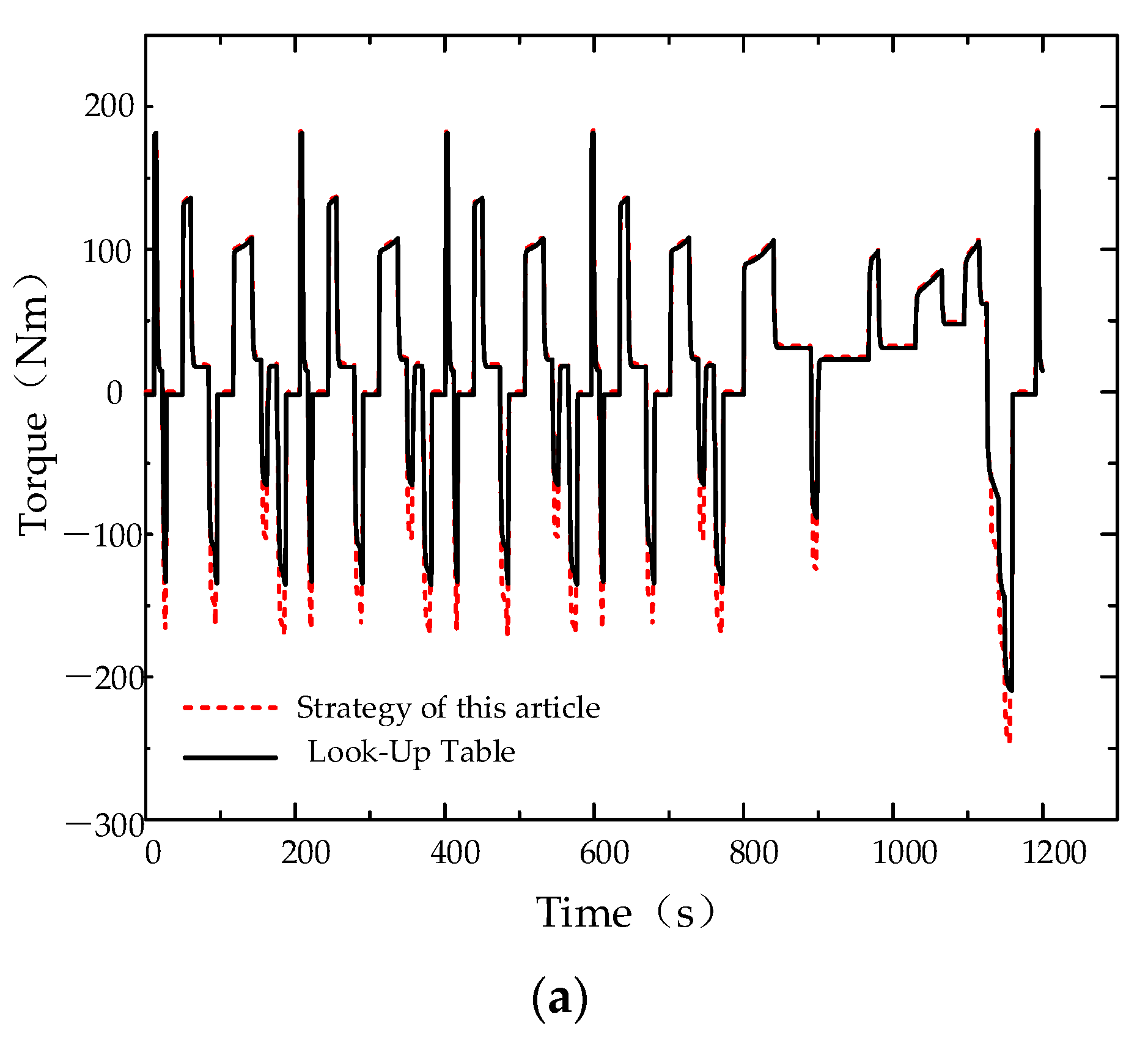
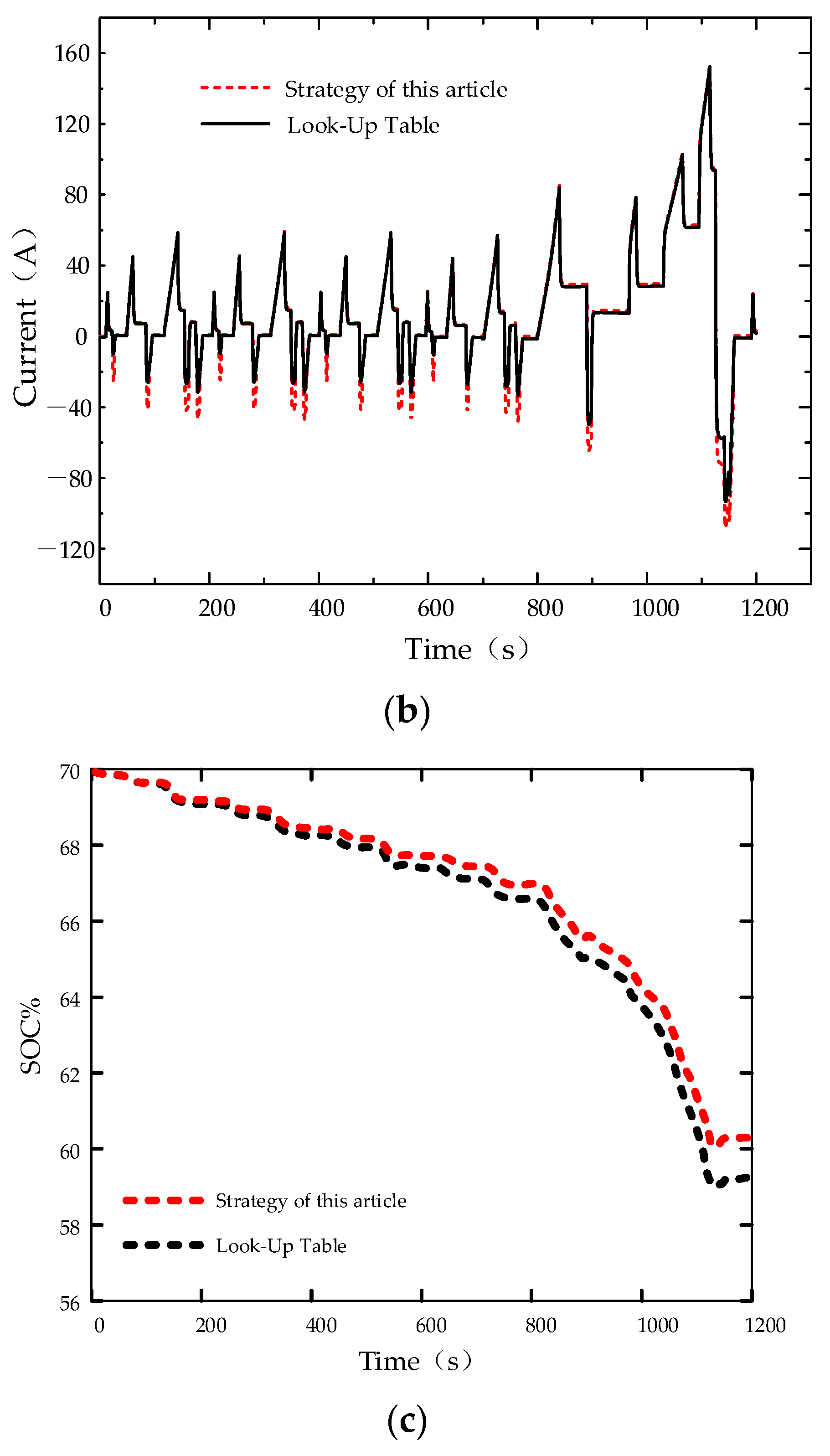
4.1. Simulink Simulation Validation
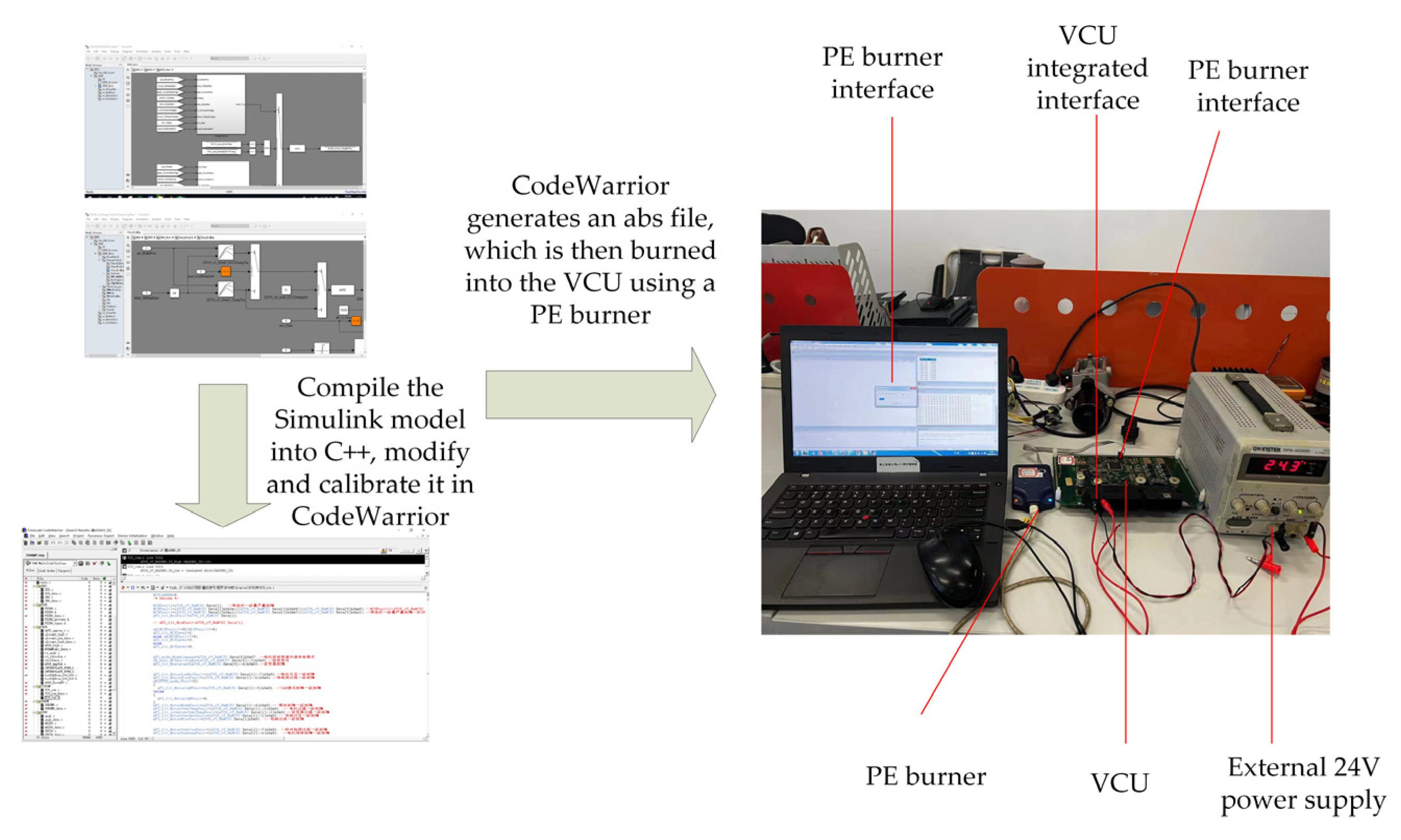
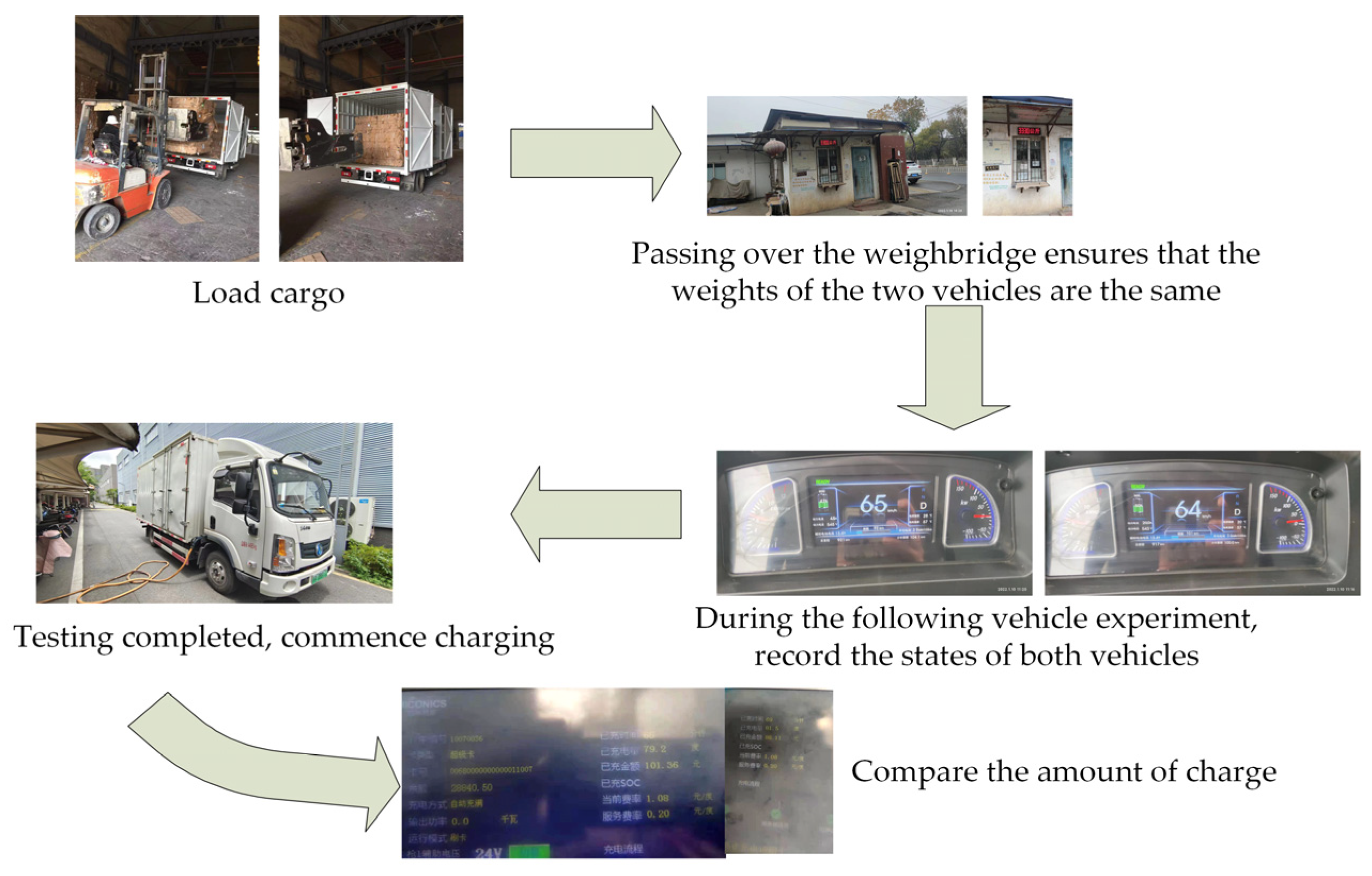
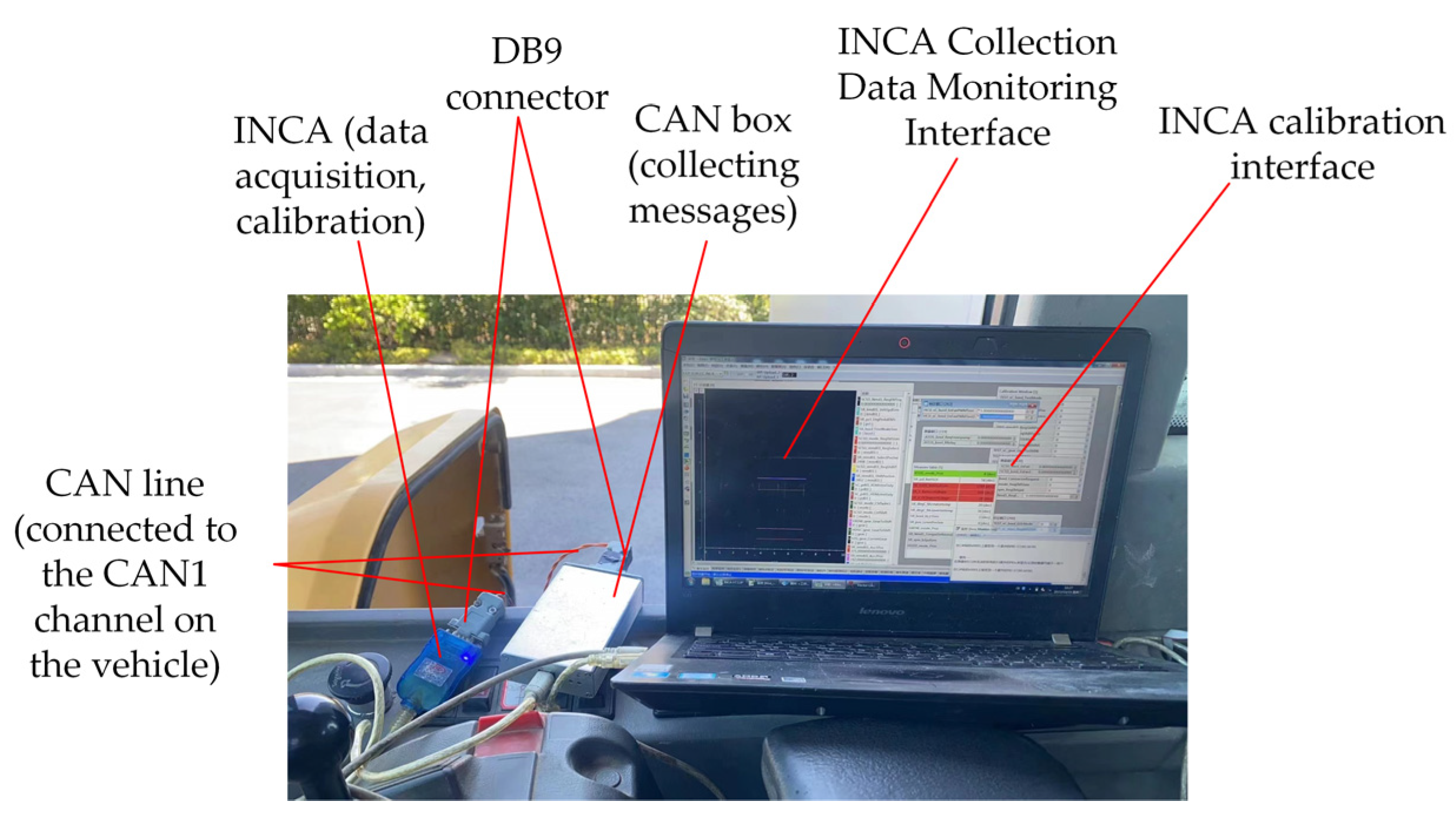
4.2. Real Vehicle Verification with a Constant-Speed Car-Following Experiment
4.2.1. Design of Constant-Speed Car-Following Experiment Scheme
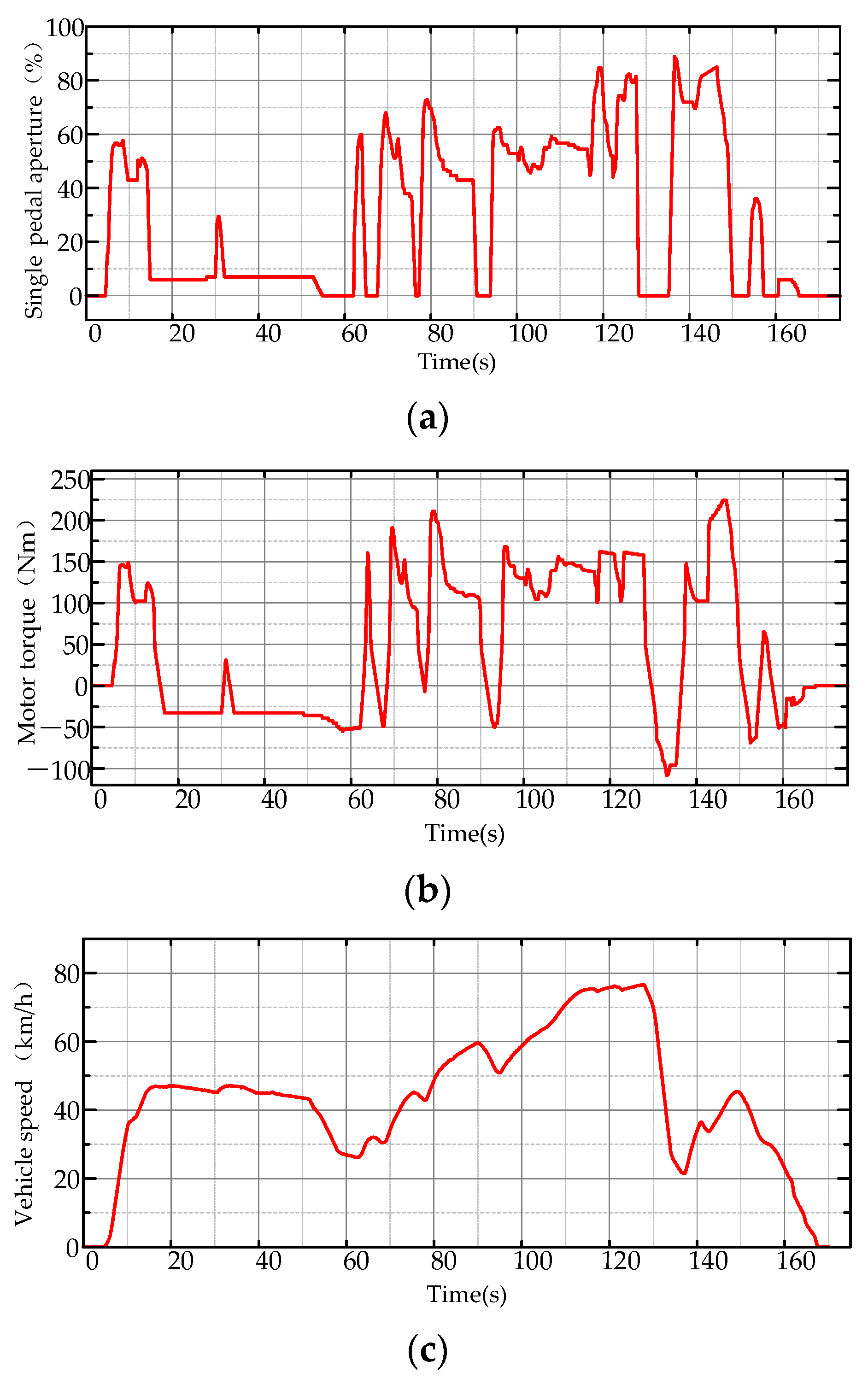
4.2.2. Analysis of the Constant-Speed Car-Following Experiment Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| The value of velocity | |
| The maximum threshold of velocity | |
| The characteristic coefficient | |
| The value of pedal aperture | |
| , , and | The maximum value of the pedal aperture corresponding to the acceleration interval, the cruise interval, and the deceleration interval, respectively |
| The value of the single-pedal aperture | |
| The emergency braking pedal aperture, | |
| SOC | The battery state of charge |
| The difference between the current pedal aperture and the previous pedal aperture | |
| The given threshold of | |
| The displacement change rate of the pedal aperture | |
| The given threshold of | |
| The road gradient | |
| The given threshold of | |
| The current regenerative braking torque | |
| α | The road gradient conversion coefficient |
| β | The pedal displacement rate conversion coefficient |
| γ | The pedal displacement conversion coefficient, |
| The threshold pedal displacement for increasing the brake pedal displacement | |
| The peak torque of the motor. | |
| z | Braking intensity |
| k | The regenerative braking proportional coefficient |
References
- Bonsu, N.O. Towards a Circular and Low-Carbon Economy: Insights from the Transitioning to Electric Vehicles and Net Zero Economy. J. Clean. Prod. 2020, 256, 120659. [Google Scholar] [CrossRef]
- Montazeri, M.; Fotouhi, A.; Naderpour, A. Driving Segment Simulation for Determination of the Most Effective Driving Features for Hev Intelligent Control. Veh. Syst. Dyn. 2012, 50, 229–246. [Google Scholar] [CrossRef]
- Lv, C.; Liu, Y.; Hu, X.; Guo, H.; Cao, D.; Wang, F.Y. Simultaneous Observation of Hybrid States for Cyber-Physical Systems: A Case Study of Electric Vehicle Powertrain. IEEE Trans. Cybern. 2018, 48, 2357–2367. [Google Scholar] [PubMed]
- Lv, C.; Xing, Y.; Lu, C.; Liu, Y.; Guo, H.; Gao, H.; Cao, D. Hybrid-Learning-Based Classification and Quantitative Inference of Driver Braking Intensity of an Electrified Vehicle. IEEE Trans. Veh. Technol. 2018, 67, 5718–5729. [Google Scholar] [CrossRef]
- Hamada, A.T.; Orhan, M.F. An Overview of Regenerative Braking Systems. J. Energy Storage 2022, 52, 105033. [Google Scholar] [CrossRef]
- Qi, J.; Liu, L.; Shen, Z.; Xu, B.; Leung, K.S.; Sun, Y. Low-Carbon Community Adaptive Energy Management Optimization toward Smart Services. IEEE Trans. Ind. Inform. 2019, 16, 3587–3596. [Google Scholar] [CrossRef]
- Yang, H.; Ji, F.; Yang, S. Research of Braking Energy Recovery System Based on Simulink-Cruise Combined Simulation. Control Eng. China 2018, 25, 1086–1090. [Google Scholar]
- Yang, X.; Wang, Y.; Liu, D. The Series Control Strategy of Regenerative Braking for Range Extender Electric Vehicles. Control Eng. China 2018, 25, 238–244. [Google Scholar]
- Liang, J.; Walker, P.D.; Ruan, J.; Yang, H.; Wu, J.; Zhang, N. Gearshift and Brake Distribution Control for Regenerative Braking in Electric Vehicles with Dual Clutch Transmission. Mech. Mach. Theory 2019, 133, 1–22. [Google Scholar] [CrossRef]
- Li, Z.; Khajepour, A.; Song, J. A Comprehensive Review of the Key Technologies for Pure Electric Vehicles. Energy 2019, 182, 824–839. [Google Scholar] [CrossRef]
- Zhang, Z.; Dong, Y.; Han, Y. Dynamic and Control of Electric Vehicle in Regenerative Braking for Driving Safety and Energy Conservation. J. Vib. Eng. Technol. 2020, 8, 179–197. [Google Scholar] [CrossRef]
- Yang, Y.; He, Q.; Chen, Y.; Fu, C. Efficiency Optimization and Control Strategy of Regenerative Braking System with Dual Motor. Energies 2020, 13, 711. [Google Scholar] [CrossRef]
- Li, S.; Yu, B.; Feng, X. Research on Braking Energy Recovery Strategy Of Electric Vehicle Based on ECE Regulation and I Curve. Sci. Prog. 2020, 103, 0036850419877762. [Google Scholar] [CrossRef] [PubMed]
- Li, Q.; Huang, W.; Chen, W.; Yan, Y.; Shang, W.; Li, M. Regenerative Braking Energy Recovery Strategy Based on Pontryagin’s Minimum Principle for Fell Cell/Supercapacitor Hybrid Locomotive. Int. J. Hydrogen Energy 2019, 44, 5454–5461. [Google Scholar] [CrossRef]
- Zhou, M.; Gao, Z.; Zhang, H. Research on Regenerative Braking Control Strategy of Hybrid Electric Vehicle. In Proceedings of the 6th International Forum on Strategic Technology, Harbin, China, 22–24 August 2011; pp. 300–303. [Google Scholar]
- Li, L.; Zhang, Y.; Yang, C.; Yan, B.; Martinez, C.M. Model Predictive Control-Based Efficient Energy Recovery Control Strategy for Regenerative Braking System of Hybrid Electric Bus. Energy Convers. Manag. 2016, 111, 299–314. [Google Scholar] [CrossRef]
- Guo, J.; Li, W.; Wang, J.; Luo, Y.; Li, K. Safe and Energy-Efficient Car-Following Control Strategy for Intelligent Electric Vehicles Considering Regenerative Braking. IEEE Trans. Intell. Transp. Syst. 2021, 23, 7070–7081. [Google Scholar] [CrossRef]
- Santini, S.; Albarella, N.; Arricale, V.M.; Brancati, R.; Sakhnevych, A. On-Board Road Friction Estimation Technique for Autonomous Driving Vehicle-Following Maneuvers. Appl. Sci. 2021, 11, 2197. [Google Scholar] [CrossRef]
- Arricale, V.M.; Genovese, A.; Tomar, A.S.; Kural, K.; Sakhnevych, A. Non-Linear Model of Predictive Control-Based Slip Control ABS Including Tyre Tread Thermal Dynamics. Appl. Mech. 2022, 3, 855–888. [Google Scholar] [CrossRef]
- Hellgren, J.; Jonasson, E. Maximisation of Brake Energy Regeneration in a Hybrid Electric Parallel Car. Int. J. Electr. Hybrid Veh. 2007, 1, 95–121. [Google Scholar] [CrossRef]
- Siddiqui, O.; Simacek, D.; Hoang, R.; Famiglietti, N.; Nguyen, B.; Landerville, J. Characterizing Regenerative Coast-Down Deceleration in Tesla Model 3, S, and X. SAE Tech. Pap. 2020, 1, 0883. [Google Scholar]
- Wen, H.; Chen, W.; Hui, J. A Single-Pedal Reg12enerative Braking Control Strategy of Accelerator Pedal for Electric Vehicles Based on Adaptive Fuzzy Control Algorithm. Energy Procedia 2018, 152, 624–629. [Google Scholar] [CrossRef]
- Shi, Q.; He, Z.; Wei, Y.; Wang, M.; Zheng, X.; He, L. Single Pedal Control of Battery Electric Vehicle by Pedal Torque Demand with Dynamic Zero Position. IEEE Trans. Intell. Transp. Syst. 2022, 23, 21608–21619. [Google Scholar] [CrossRef]
- Liu, W.; Qi, H.; Liu, X.; Wang, Y. Evaluation of Regenerative Braking Based on Single-Pedal Control for Electric Vehicles. Front. Mech. Eng. 2020, 15, 166–179. [Google Scholar] [CrossRef]
- Zhao, Z. Research on Single Pedal Control Strategy of Electric Drive Loader. Master’s Thesis, Jilin University, Changchun, China, 2020. [Google Scholar]
- He, H.; Lou, J. Research on Single Pedal Regenerative Braking Control. Veh. Power Technol. 2022, 2, 1–6. [Google Scholar]
- Qi, W. Fuzzy Control Strategy of Pure Electric Vehicle Based on Driving Intention Recognition. J. Intell. Fuzzy Syst. 2020, 39, 5131–5139. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Numerical Value |
|---|---|
| Normal vehicle speed | 40–60 km/h |
| Maximum speed | 90 km/h |
| Maximum output torque of rear axle | 8000 N·m |
| Rated voltage | 540 VDC |
| Rated power | 50 kW |
| Peak power | 85 kW |
| Battery capacity | 100 kWh |
| Rated speed | 5800 r/min |
| Peak speed | 12000 r/min |
| Rated torque | 170 N·m |
| Peak torque | 320 N·m |
| Gradient L | Gradient M | Gradient H | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| k | v | k | v | k | v | ||||||||||||
| L | M | H | VH | L | M | H | VH | L | M | H | VH | ||||||
| z | L | VL | VL | L | M | z | L | VL | L | M | H | z | L | VL | L | M | H |
| M | VL | L | M | H | M | L | M | H | H | M | L | M | H | H | |||
| H | L | M | H | H | H | M | H | H | VH | H | M | H | H | VH | |||
| VH | M | H | H | VH | VH | H | H | VH | VH | VH | H | H | VH | VH | |||
| Parameter | Regenerative Braking Strategy of Look-Up Table Method | Based on Single-Pedal Regenerative Braking Strategy |
|---|---|---|
| Whole vehicle energy consumption/kJ | 6078 | 6058 |
| Total braking energy/kJ | 1015 | 1026 |
| Battery recycling/kJ | 310 | 521 |
| Brake energy recovery rate/% | 30.5 | 50.8 |
| Effective braking energy recovery rate/% | 5.1 | 8.6 |
| Experiment Number | Control Strategy | Remaining SOC Value/% | Charging Capacity /kWh | Energy Consumption Optimization Rate/% |
|---|---|---|---|---|
| 1 | The strategy of this article | 18 | 79.9 | 3.73 |
| Original vehicle strategy | 12 | 83.0 | ||
| 2 | The strategy of this article | 20 | 78.8 | 3.45 |
| Original vehicle strategy | 15 | 81.6 | ||
| 3 | The strategy of this article | 21 | 77.8 | 5.81 |
| Original vehicle strategy | 13 | 82.6 | ||
| 4 | The strategy of this article | 20 | 78.9 | 4.48 |
| Original vehicle strategy | 13 | 82.6 | ||
| 5 | The strategy of this article | 21 | 77.6 | 4.20 |
| Original vehicle strategy | 15 | 81.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Shi, Z.; Gao, J.; Xi, J. Research on Regenerative Braking Control Strategy for Single-Pedal Pure Electric Commercial Vehicles. World Electr. Veh. J. 2023, 14, 229. https://doi.org/10.3390/wevj14080229
Li Z, Shi Z, Gao J, Xi J. Research on Regenerative Braking Control Strategy for Single-Pedal Pure Electric Commercial Vehicles. World Electric Vehicle Journal. 2023; 14(8):229. https://doi.org/10.3390/wevj14080229
Chicago/Turabian StyleLi, Zhe, Zhenning Shi, Jianping Gao, and Jianguo Xi. 2023. "Research on Regenerative Braking Control Strategy for Single-Pedal Pure Electric Commercial Vehicles" World Electric Vehicle Journal 14, no. 8: 229. https://doi.org/10.3390/wevj14080229
APA StyleLi, Z., Shi, Z., Gao, J., & Xi, J. (2023). Research on Regenerative Braking Control Strategy for Single-Pedal Pure Electric Commercial Vehicles. World Electric Vehicle Journal, 14(8), 229. https://doi.org/10.3390/wevj14080229