1. Introduction
The most effective localization methods in a challenging environment, such as urban environments, are vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) [
1]. In such techniques, the localization process can be established using either a communication technique based on sharing information or a transmission technique based on utilizing the multipath components (MPCs) [
2,
3]. However, the communication technique still faces latency and reliability challenges, especially in urban environments, although the 5G and millimeter-Wave (mm-wave) communication technologies have been widely used to meet the massive data transmission demand [
4]. The transmission techniques (also called geometric-based) are proposed to handle this challenge in several research. The localization concept of the geometric-based techniques involves exploiting the characteristics of FOMP, such as path length, angle of arrival, and angle of departure, to localize the vehicle based on geometrical relationships [
5,
6,
7]. For example, in [
7], the propagation time and angular characteristics of the FOMPs are utilized to allow a sensing vehicle (SV) to localize the hidden vehicle (HV). Unfortunately, in multipath environments (i.e., urban areas), the propagation phenomenon of the signal between two blocked transceivers is a combination of FOMPs and HOMPs [
8,
9,
10,
11].
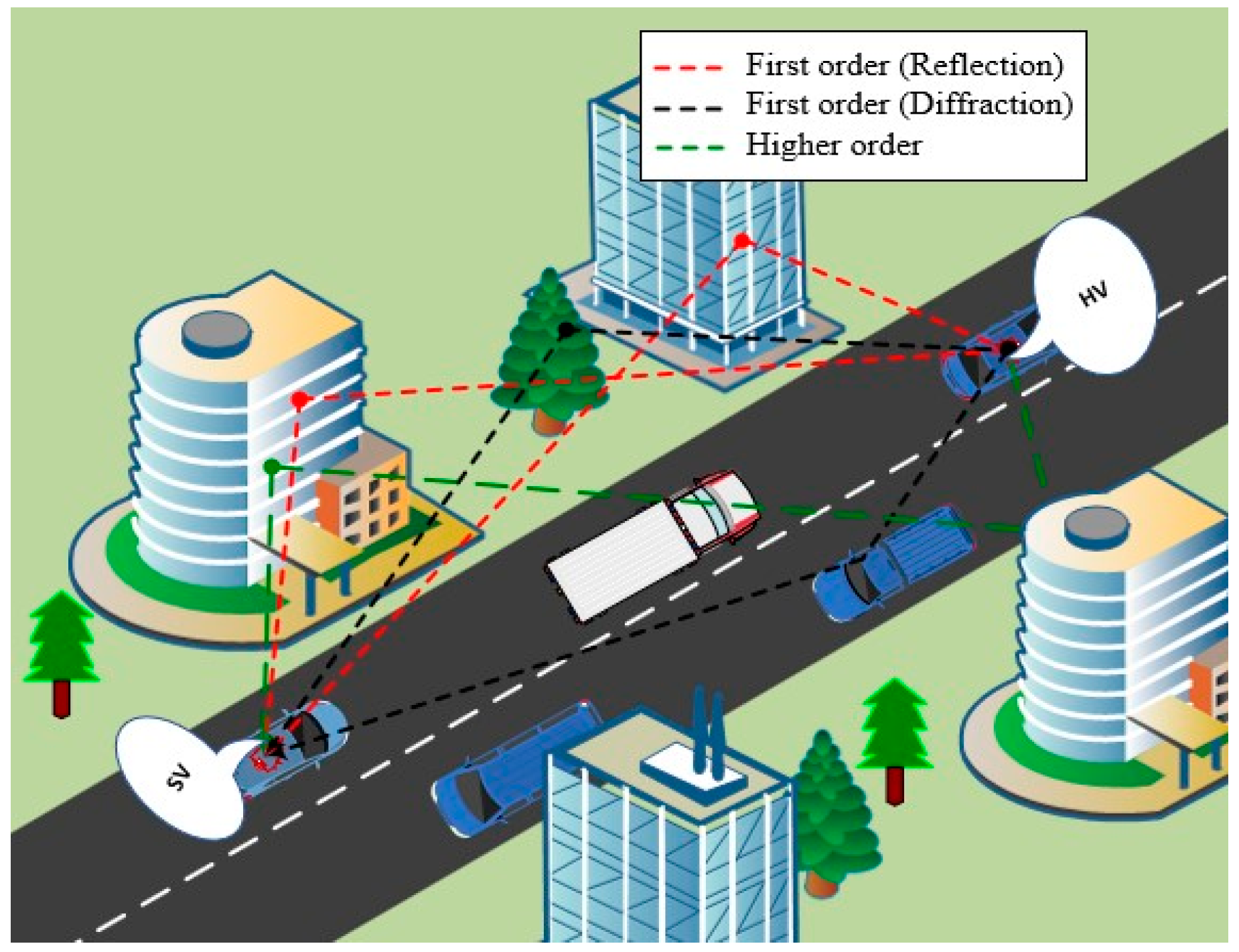
Figure 1 shows the types of propagation paths that can be established between HV and SV. However, mistakenly using HOMP’s characteristics rather than FOMP’s characteristics is considered a major challenge in geometric-based techniques. It has a negative impact on localization accuracy. Therefore, detecting the FOMPs among the HOMPs is important for achieving precise localization.
So far, various techniques have been proposed for distinguishing between the FOMPs and HOMPs. These techniques, in brief, are mainly relied on a statistical condition of the characteristics of the received signal. For instance, the authors in [
12] assumed a determined level of the received signal as a threshold to identify the FOMP. In the same manner, the time of arrival (TOA) based on a proximity detection method is utilized in [
11]. The authors in [
13,
14] presented an analytical model to characterize the path loss as a threshold to identify the FOMPs. Unfortunately, methods that rely on a deterministic threshold exhibit complexity, owing to the necessity of the complex analyses, and the inaccuracy particularly in high-frequency bands (mm-wave bands), due to the challenge of identifying the exact threshold. The inherent sparsity of the mm-wave channel causes disordering of the propagation path characteristics of the transmitted signal. This leads to the absence of a precise threshold and in turn introduces misjudgment in the distinguishing process. Therefore, to break through the drawbacks of this method, a classification technique based on machine learning (ML) is proposed to distinguish the FOMPs.
In ML tools, such as supervised learning classification models, the classification decision is created based on a previous training process. Such methods have a good classification performance provided that the features of the training data are carefully prepared. In general, the classification performance of ML models is affected by two main factors: the features of the training dataset, and the hyperparameters of the model. More details about the classifiers will be presented in
Section 3.1. However, in wireless communications aspects, the MPCs, such as received power, propagation time, and angle of arrival and departure, have been utilized as features of the training data for various purposes in the literature. Generally, these characteristics can be extracted either from experiments, based on measurement, or from simulation tools [
15,
16]. The experimental methods have difficulties and high costs especially when a large amount of data is required. Therefore, the researchers resort to simulation tools instead of experimental methods.
Typically, the simulation tools that have been utilized for this purpose, are built on either empirical (stochastic) or deterministic models. The empirical models rely on observation and measurement based on theoretical analysis to predict propagation characteristics. Meanwhile, the deterministic models leverage geometric optics. Ray tracing is one of the deterministic modeling methods. It provides high accuracy and more reliable predictions for the propagation path characteristics of high-frequency communication networks, i.e., mm-wave bands. Therefore, it has been considered to predict the propagation characteristics of 5G networks and beyond in several research [
17,
18,
19]. Since this work is basically concerned about mm-wave bands; thus, the ray tracing technique will be considered a predation model of the propagation characteristics. Readers can refer to the reference [
16] for more details about the channel modeling techniques.
However, the major contributions of this work are as follows:
We presented a statistical analysis of the characteristics of the propagation paths and investigated how these characteristics impact the FOMPs identification.
We proposed an efficient solution based on supervised classifiers to distinguish between the FOMP and the HOMP in blocked V2V communication by applying six supervised classifiers. The training dataset was generated by using a ray tracing technique.
We tested the proposed classifiers using different strategies. Then their performance is compared in terms of several well-known metrics such as accuracy and precision. Furthermore, since this work is interested in the FOMPs, we presented a particular metric based on the estimation error of the HOMP as FOMP.
The rest of this paper is organized as follows, after this protracted introduction, a review of the related works is presented in
Section 2. Then, a brief explanation of ML is provided in
Section 3. The methodology of this research is described in
Section 4. In
Section 5, an analysis of the obtained results is presented including validation of the ray tracing predictions, statistically analyzing the propagation characteristics, and discussing the performance of the proposed classifiers. Finally, the conclusion is drawn in
Section 6.
2. Related Works
Typically, in the localization aspect, the classification methods have been used either for identifying the FOMPs or for identifying the Line of Sight (LOS) and Non-Line of Sight (NLOS). Therefore, the related works in this paper are presented in two parts. The first part highlights the works that utilized the conventional techniques based on the deterministic threshold for FOMPs identification, while the second part highlights ML for LOS and NLOS identification. The proposals that used conventional techniques to identify LOS and NLOS are ignored.
Earlier, the FOMPs and HOMPs identification methods have been presented in [
11] based on proximity detection technique. They used TOA to normalize the weighting factor of the path; thus, the HOMPs are identified as outliers. In a similar vein, an iterative strategy based on the generalized likelihood ratio test is proposed in [
20] to detect the FOMPs and HOMPs of the downlink. In these methods, a complex analysis is required. However, since the power of the transmitted signal is strongly attenuated by the reflection; therefore, the received power had been utilized to distinguish between the FOMPs and HOMPs in several works, [
8,
21,
22] are among them. However, the obtained results in [
2] illustrated that, the received power alone could not be used to accurately distinguish between the FOMPs and HOMPs. However, in summary, the traditional methods are complex and insufficiently accurate.
However, motivated by the efficient performance of ML classifiers, it has been widely used to solve classification problems in the literature for several aspects. In the localization field, the supervised classification models became popular for LOS and NLOS identification. The researchers utilized different direct or indirect characteristics of the paths as an input vector. For instance, the authors in [
23] discriminated LOS paths and NLOS according to the Rician k factor. In [
24], the authors combined the angular information of the mm-wave channel with the features, such as RMS delay spread, kurtosis, and Rician K factor, to train the SVM in order to identify the LOS and NLOS. They showed that the features in the angular domain significantly improved the accuracy of the SVM model. The non-temporal configurations (frequency characteristics) of the channel impulse response of Ultra-wideband signal are exploited as an input vector for training the Convolutional Neural Network (CNN) model to extract the features, the CNN output is then used to feed the Long Short Term Memory Network (LSTM) model [
25]. High accuracy of LOS/NLOS classification has been achieved in that work, but there are also highlighted limitations such as the authors didn’t investigate the influence of the obtained classification on the position estimation; furthermore, the diffraction effects were limited in the training data. The angular parameters of the mm-wave channel have been utilized in [
26] to identify LOS and NLOS environments. The author proposed a neural network model named angle information learning neural network. The angular parameters have been used to learn the proposed model. That work achieved identification accuracy of up to 99.41%.
Based on the above review, we have observed that, the deterministic threshold is adopted for identifying the FOMPs. Meanwhile, ML is still not used for this purpose. ML has been widely used for identifying the LOS and NLOS. We also observed that the traditional methods are complicated and not accurate enough. This has motivated us to propose an identification method by employing ML to distinguish between the FOMPs and HOMPs. The features of the training dataset are considered based on some of the characteristics that have been used to identify the LOS and NLOS. In particular, five well-known classifiers namely Decision Tree (DT), Naive Bayes (NB), Support Vector Machine (SVM), K-Nearest Neighbors (KNN), and Random Forest (RF), are considered. Furthermore, an artificial neural network (ANN) model is proposed, as it has become very popular nowadays.
3. Background on ML Classifiers
Basically, this work aims to apply supervised ML techniques for distinguishing the FOMPs and HOMPs. Therefore, this section is dedicated to presenting a brief explanation of the supervised classifiers, the features of the training dataset, and performance evaluation criteria.
3.1. Supervised Classisfication Algorithms
Supervised classifiers are one of the most popular techniques in data mining aspect. Its working principle is creating a decision based on analysis of the data that have been entered previously. Typically, the classification process of the supervised classifiers consists of two phases. The first phase is learning based on the training. In this phase the labeled data is used to train the model to generate the prediction algorithm. The second phase is classification, where the trained model is used to predict the label classes. However, there are several supervised classification models have been proposed for different purposes in the literature. In this part, a brief discussion about the five most popular classifiers, is presented. Additionally, a brief discussion of the ANN learning model, which is widely utilized in the same context of our study. However, more information about the supervised classifiers can be found in the reference [
27].
DT classification algorithm is the most well-known. The fundamental principle of its classification algorithm is by utilizing a top-down technique through the tree to search for a proper decision. The tree is built based on the training data. The decision is established based on a series of sequence processes. The DT algorithm can be used with both linear and nonlinear numerical data. It has fast learning and is easy to understand and interpret. On the other hand, overfitting data is more likely to occur. The algorithm of the NB classifier basically relies on Bayes’ formula. In NB, the features are grouped independently, and the features are assumed not related to each other. Similar to DT, the NB classification has fast learning. In addition, there is not a too large amount of data required for training.
SVM can be used for regression and classification problems. It is most popular for binary classification. SVM’s algorithm consists of two stages. First, the data is mapped into n-dimensions. Then, the hyperplane is used to classify the data into two classes. However, the SVM’s performance is affected by the noisy data. The KNN algorithm is also considered one of the simplest classifiers. The classification decision of the KNN algorithm is taken based on the number of neighborhoods, i.e., the value of K. Therefore, different values of K may obtain a different classification. The value of K is usually set to an odd number. It is also determined by the trial-and-error method. This is considered the main disadvantage of the KNN algorithm. Nonetheless, on the other hand, the KNN algorithm is more robust even with noisy data. RF algorithm is basically a combination of multiple DT. The trees are randomly created. Therefore, it is called a random forest. It is presented to overcome the DT overfitting problem, where the decision is made based on the subset of the training data in parallel and the final output is generated by combining the output of the individual trees.
In terms of the training time, usually, the RF model requires a higher compared to the DT model, but the prediction results of RF models outperform the DT models in most cases. However, NN and deep learning algorithms have become popular in the last few years. It has been widely used to solve linear and non-linear problems whether it is classification or regression. Its learning concept is adjusting the weights of the neurons to reduce the error of the prediction. Several models of NN have been presented in the literature, such as ANN (single layer), DNN (multiple layers: input layer, hidden layers, output layer), CNN, and LSTM. However, the prediction accuracy of these models is higher and more robust, i.e., is not affected by the noisy data. On the other hand, compared to the previous models, these models have deprived interpretation.
3.2. Features Selection
Consider the V2V scenario as shown in
Figure 1. The established transmission system between the vehicles is used for localization, where the sensing vehicle desires to localize the hidden vehicle by utilizing the characteristics of the transmitted signal. According to [
28] the characteristics of the transmission channel of the multipath components (MPCs) at the receiver (sensing vehicle) can be expressed as follows
where,
N is the number of received MPCs.
and
are respectively the complex amplitude and the delay of the Nth received path.
and
are the angle of departure and arrival of the received path, respectively. They also represent the horizontal and vertical angles of each path. However, from Equation (1), we can directly obtain several characteristics of the MPC, such as the received power, delay, and horizontal and vertical angles. In the following, a brief explanation of the impact of these characteristics for distinguishing the type of propagation path.
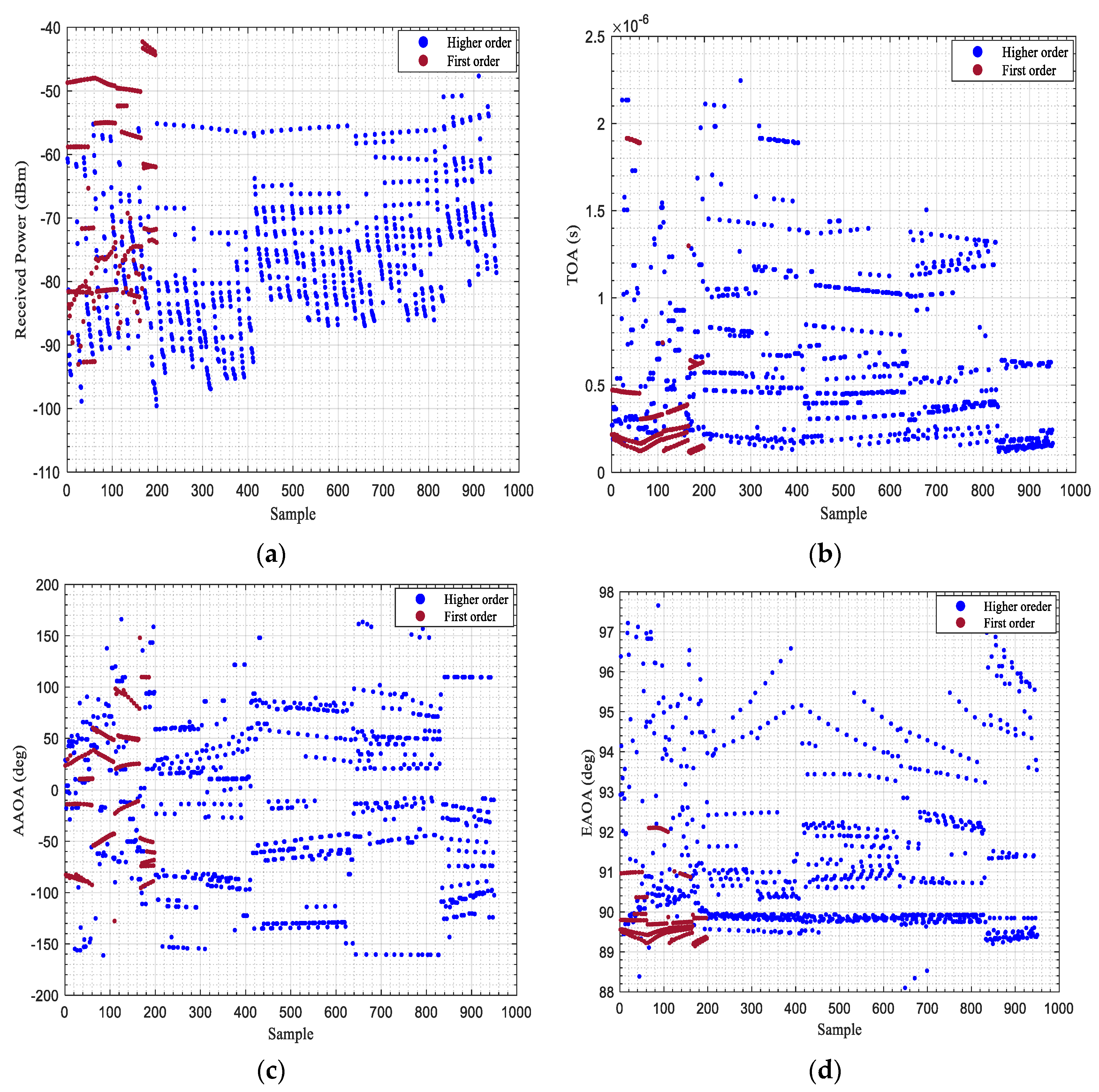
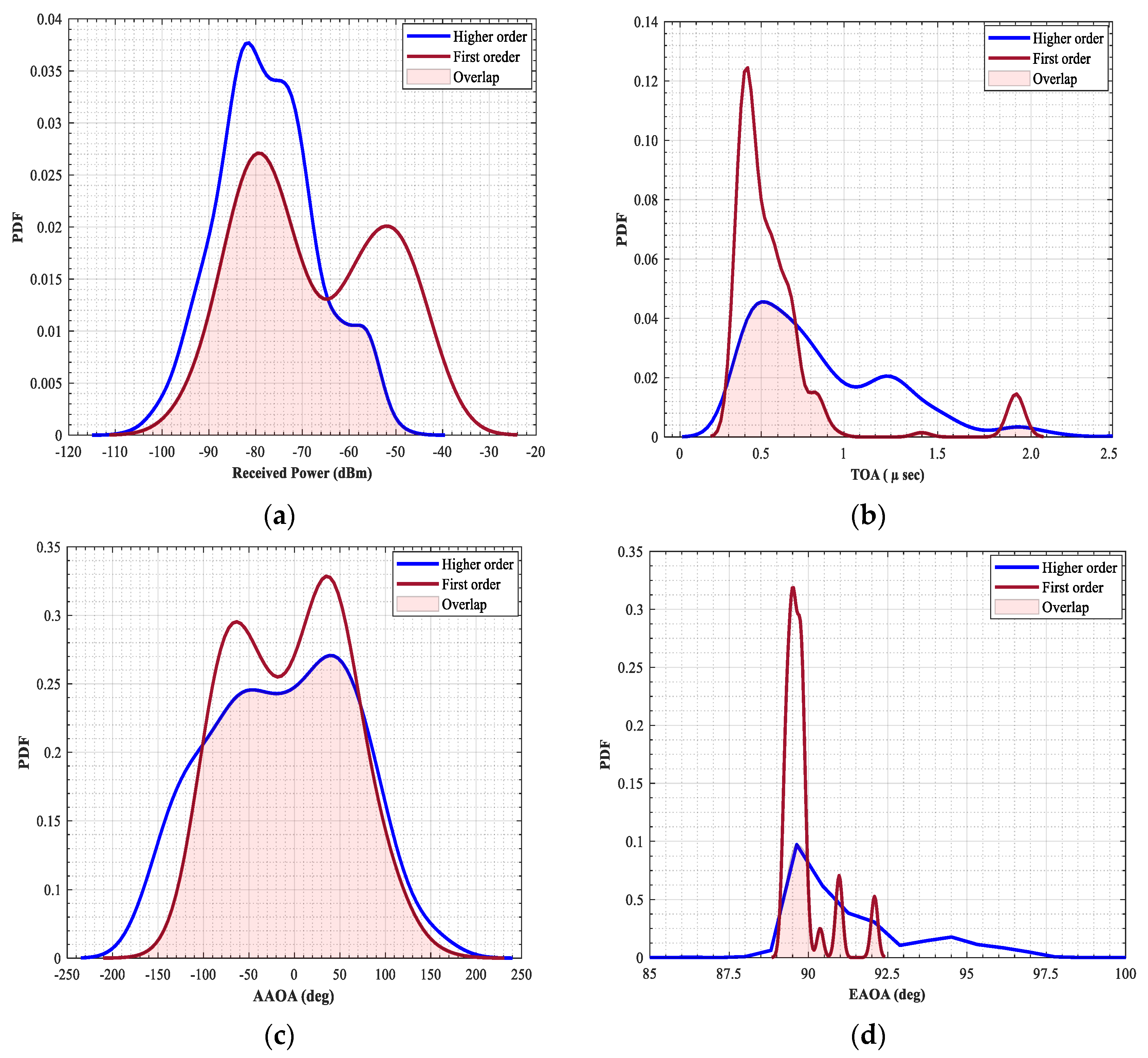
3.2.1. Received Power (RP)
Logically, the FOMPs include the amount of received power more than the HOMPs. Often the FOMPs are the dominant paths that carry a significant amount of power. The more reflections the more power losses. Therefore, the received power can be considered as a feature to distinguish the type of paths. However, some of the propagated paths are scattered by the edge of the buildings. These paths usually contain a lower amount of received power even though they are FOMP. Thus, ambiguity will occur if the identification relies on the received power stand-alone.
3.2.2. Propagation Time
It is defined as the measurement of the required time for the transmitted signal to reach the receiver through a relative propagation path. Generally, the propagation time of the HOMPs is larger than the FOMPs. The presence of more reflections in the path propagation leads to a higher propagation delay at the time of arrival (TOA). This feature can be integrated with the previous feature to improve the accuracy of classification.
3.2.3. Angular Variation
The direction of the incoming signal is also called the angle of arrival (AOA). It can be accurately estimated in mm-wave systems thanks to multiple input multiple output antenna (MIMO). Therefore, it has been exploited for positioning purposes [
29]. However, AOA can be measured horizontally or vertically; they are called azimuth and elevation respectively. Basically, the azimuth angle of arrival (AAOA) is related to the layout of the surrounding environment, while the elevation angle of arrival (EAOA) is related to the propagation path length, especially when the transmitter and receiver have different heights.
In summary, the considered input vector of the training data can be expressed as follows X = {Received power, delay, AAOA, EAOA} of the nth arrived path of each snapshot.
3.3. Assessment Criteria
In order to evaluate the performance of ML classifiers, the prediction results of the model should be assessed. There are several well-known metrics have been presented in this regard. The most popular metrics are accuracy, precision, receiver operating characteristic (ROC), mean absolute error (MAE), and root mean squared error (RMSE).
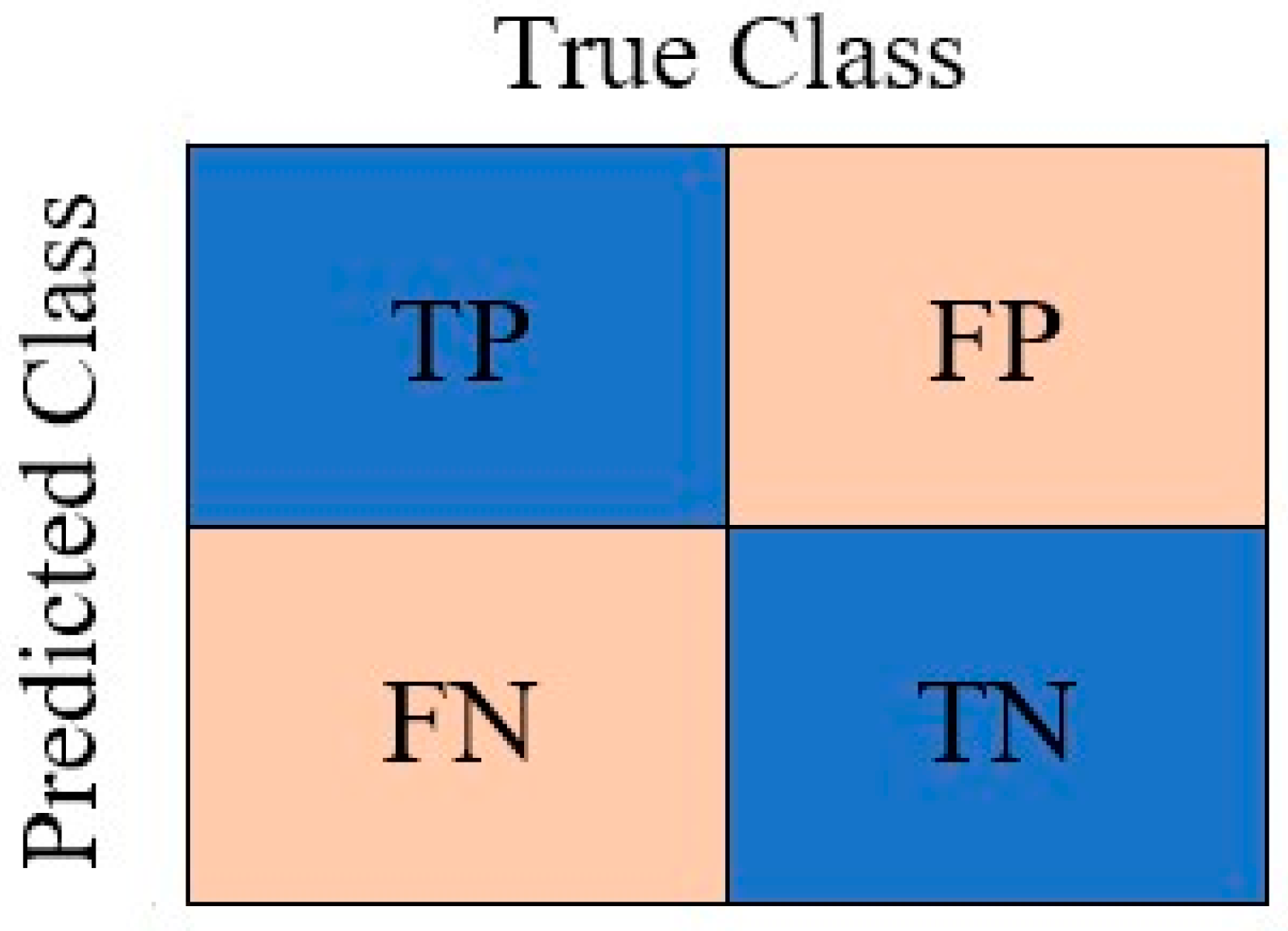
Assume a confusion matrix of the binary classification model, as shown in
Figure 2, where the positive is considered to represent FOMP, while the negative is considered to represent HOMP. The true positive (TP) denotes the FOMPs that are truly predicted as FOMPs. The false positive (FP) denotes the HOMPs that are predicted as FOMPs. The false negative (FN) denotes the FOMPs that are predicted as HOMPs. The true negative (TN) denotes the HOMPs that are truly predicted as HOMPs.
3.3.1. Accuracy
It is the ratio of all samples that are accurately predicted to all samples. It can be calculated as
3.3.2. Precision
It is the ratio of the TP samples to all samples that are predicted as positive samples (i.e.,
TP and
FP). Its formula is
3.3.3. Recall
It is the ratio of
TP samples to the total correct predicted samples (
TP and
FN). It can be calculated by
3.3.4. Mean Absolute Error (MAE)
It is the absolute error between the actual classes and the predicted classes. It is expressed by
where
and
are the actual and predicted class respectively.
3.3.5. Root Mean Squared Error (RMSE)
It is also used to represent the difference between the actual classes and the predicted classes. It is expressed by
The above metrics are standard, they have been widely used for evaluating the performance of the classifiers in various aspects. In this work, we are interested in the HOMP misclassification (the actual HOMP that have been predicted by the classifier as a FOMP) which will produce more localization errors. Therefore, the most important metrics in our work regard are accuracy and precision because their formula consists of the FP. Meanwhile, the recall metric is not important in our case, since the FOMPs that are predicted by the classifier as HOMPs will be ignored, i.e., the localization accuracy won’t be affected. However, MAE and RMSE metrics represent the classification errors including the FOMP and HOMP. However, we also define additional metric for performance evaluation as follows:
3.3.6. HOMP Prediction Error (HOMPPE)
It is the ratio of the misclassification HOMPs (FP) to the total actual HOMPs.
4. Methodology
The main purpose of this work is to present an efficient method to distinguish between the FOMPs and HOMPs based on supervised classification. The ray tracing technique will be used to generate the dataset. Therefore, the methodology of this work is divided into three parts. The first part explains the simulation setup. The second part illustrates the configuration of V2V communication scenario and how the dataset is collected. The third part describes the method of applying the supervised classifiers to achieve the purpose of this work.
4.1. Simulation Setup and SBR Validation
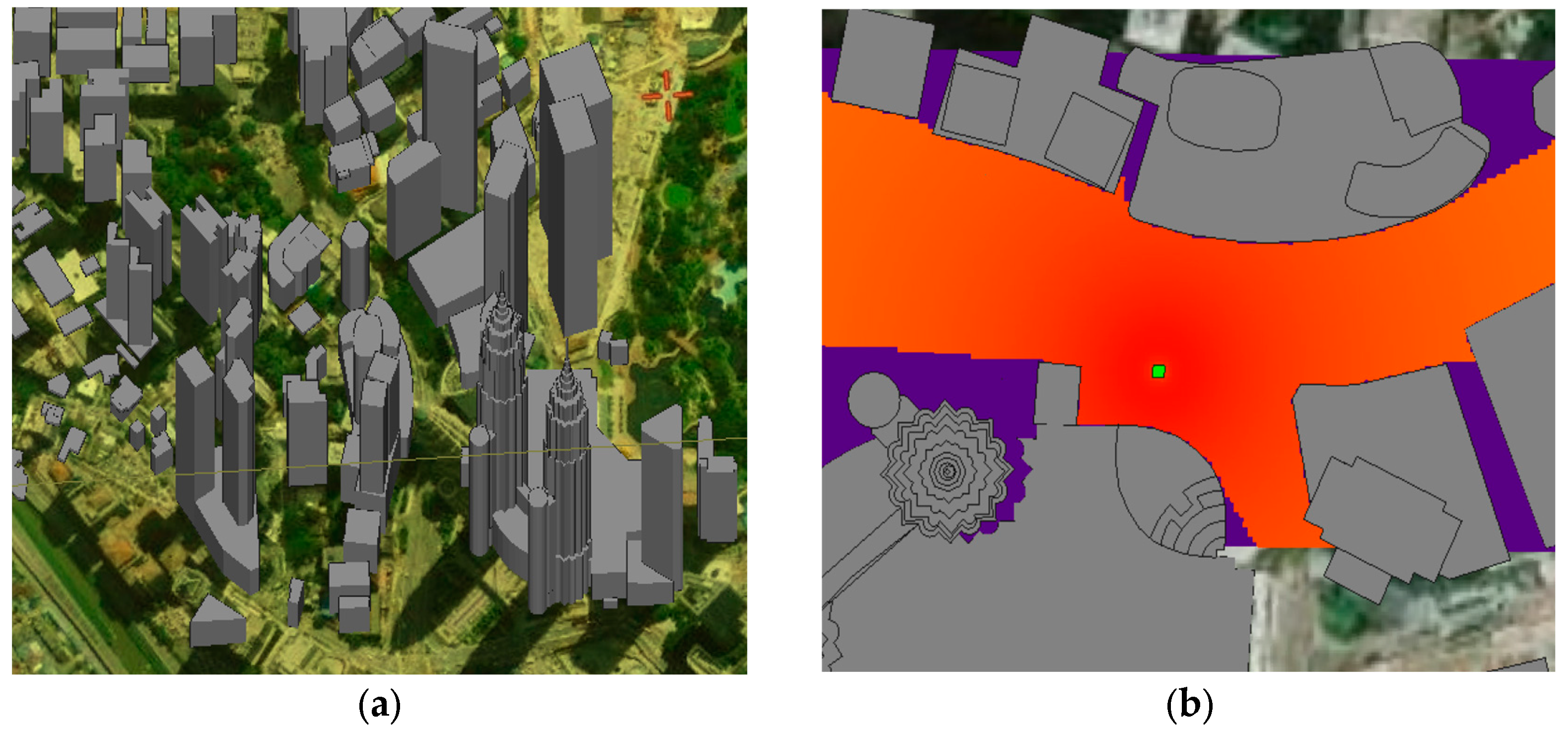
Wireless InSite (WI) software, developed by Remcom, is used to model the realistic V2V scenario in the considered urban environment, which is Kuala Lumpur City Centre (KLCC), Jalan Ampang. To create a geometric structure (buildings detailed) of the interested area, a real 3D model of KLCC is downloaded first from the Cadmapper website [
30]. Then, this 3D model is prepared and converted into dxf format by using SketchUp application. Finally, the dxf file is imported to WI simulation as shown in
Figure 3a. The values of electromagnetic (EM) parameters of buildings, leaves, and objects were set based on [
31,
32]. The EM parameters of the simulation setup are listed in
Table 1.
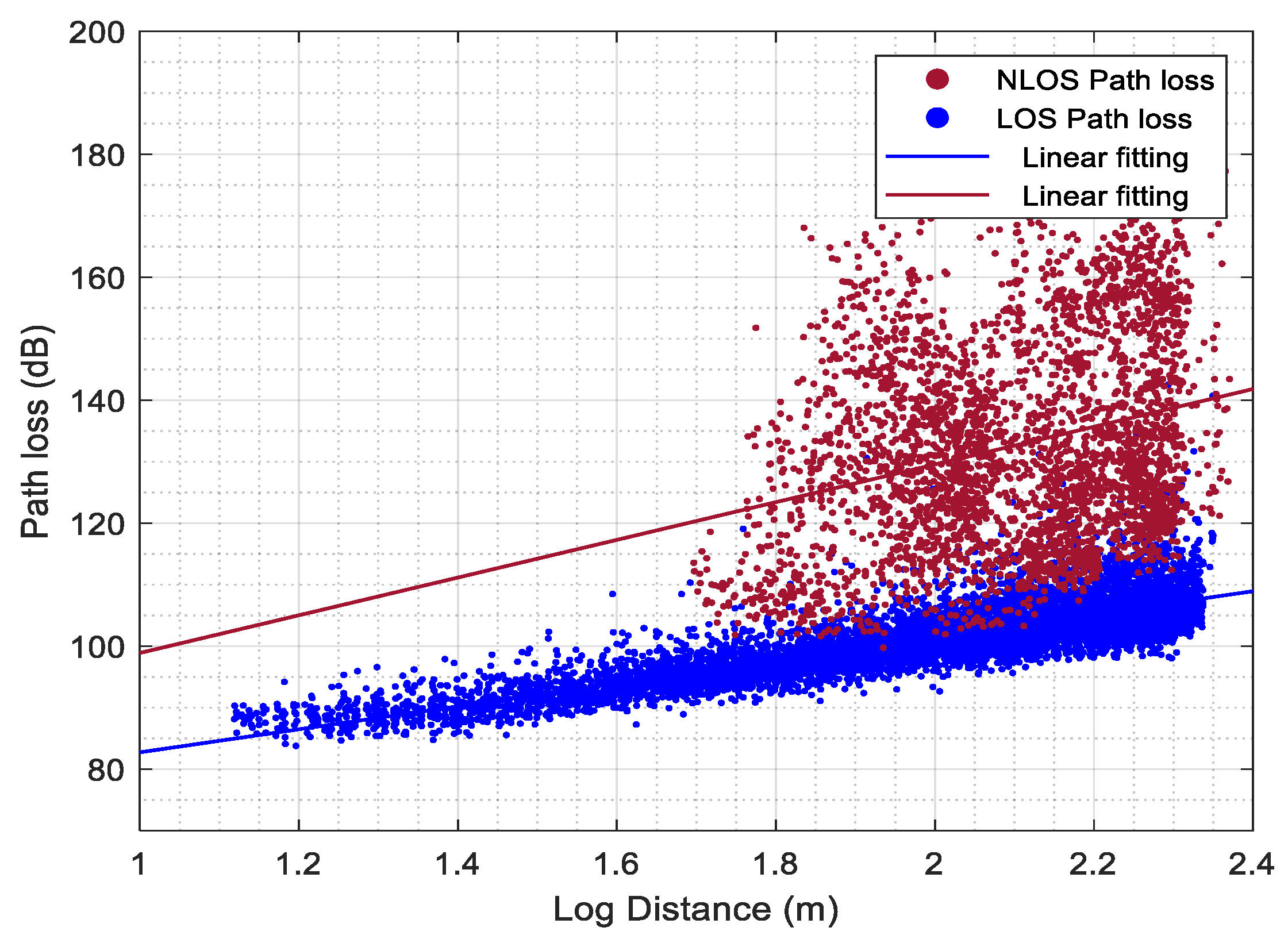
In order to verify the validity of the ray tracing results, an urban 5G micro cell (UMi) scenario is formed with dimensions of 200 m × 400 m in the considered environment as shown in
Figure 3b. The parameters of the formed UMi are listed in
Table 1. The specifications of the formed UMi are inspired by [
33,
34]. The performance of the UMi is analyzed and compared with the previous works in terms of received power (often modeled by path loss) for LOS and NLOS conditions. It is worth mentioning that, the prediction correctness of the ray tracing simulator is validated based on the received power only, where it is more relevant to the buildings’ layout and materials (i.e., user-defined). Regarding the predictions of the other propagation characteristics, such as propagation time and angular properties, it is mainly defined by the designer of the ray tracer simulator. Therefore, they are not going to be involved in the validation.
4.2. V2V Configuration and Data Collection
In this part of the methodology, first, we explain the established V2V scenario. Then, present the data processing including the method of obtaining the paths’ characteristics from the ray tracing simulation and labeling the obtained data.
The established V2V scenario is inspired by
Figure 1. The vehicles are blocked from each other, there are no existing direct paths between the vehicles. Three boxes (objects) have been created to present the HV, SV, and blockage (the vehicle in between). The dimensions of the HV and SV objects are 4.5 m (length), 2 m (width) and 1.5 m (height). Meanwhile, the blockage dimensions are set to 5 m (length), 4 m (width), and 4 m (height). The transmitter and receiver antennas are located on the top of the HV and SV with a height of 2 m. The model is considered to be single input single output (SISO) for simplicity purposes. The types of both antennas are selected to be isotropic antennas with vertical polarization. The transmission power is set to 14.6 dBm. The separated distance between the vehicles is varied in range from 20 m to 50 m as the normal distance between two blocked vehicles in the real world. In order to simplify the simulation, the vehicles are assumed to be stationary (no mobility) while capturing the path characteristics. Note that, the typical speed of the vehicle in urban environments is less than 50 Km/h. Therefore, with the high sampling rate, the change of nominal characteristics will be very small, i.e., the assumption is reasonable. We select mm-wave at 28 GHz frequency band with a channel bandwidth of 450 MHz, which is a candidate in Release 15 of 5G for outdoor wireless communications, as the operating frequency. Ray tracing technique based on SBR is utilized to predict the propagation path characteristics. The maximum number of propagation paths is set to 25, where a large number of propagation paths will not improve the prediction accuracy of the propagation characteristics in the simulation results [
35]. The parameters of the V2V configuration are depicted in
Table 2.
In terms of dataset collection, the SBR technique is utilized for predicting the characteristics, i.e., received power, propagation time, and horizontal and vertical angle of arrival, of each propagated path that arrived at the receiver (SV). A total of various 46 locations are selected to record the data in order to include the effect of reflections on a variation of parameters of the received signal. The data are recorded for 25 paths at each location. This means that 1150 samples are collected while the simulation is running.
4.3. Data Preparation and Supervised Classification Models
This section elaborates on the process of preparing the dataset for training the classifier including labeling the data and dividing it into training, validating, and testing. In addition, this section also discusses the setup and configuration of the proposed classifiers. However, WI enables us to visualize the propagation mechanism of the paths. Based on this visualization, the stored data are manually labeled into binary classes (i.e., 0 and 1). Where the FOMPs are labeled as 0′s class, and the HOMPs are labeled as 1′s class. After labeling the data, a shuffling method is used for dividing the data for training, validation, and testing the classifiers. 85% of the data are used for training and validating the proposed classifier respectively, whereas 15% of the data is used for testing the proposed classifiers. Since the training data is imbalanced, (the number of HOMPs (1′ class) is around three times more than the number of FOMPs (0′s class)), in addition, the data size is not too large, a random over-sampling method is applied to handle this issue. Furthermore, the k-fold cross-validation technique is used to protect classifier performance against overfitting. In the k-fold cross-validation technique, the dataset is randomly divided into 10 partitions (folds) for training and validation, where each folder includes the same values of labels. Then, the classifier is trained using the training data, and its performance is assessed by using validation data. Finally, the average of validation errors over all files is calculated. This means that the classifier will be trained and validated with all the data.
In binary classifiers, the mathematical model is formulated using a decision function that maps the input vector
X = [RP, TOA, EAOA, AAOA] to a binary output label
Y = (0 or 1). The decision function is presented based on the classification algorithm. The objective of training the classifiers is to minimize the average value of the binary cross-entropy loss function. The classifier predicts the class as an optimization problem based on the learning method by adjusting the weights (
w) and biases (
b). The binary cross-entropy loss can be defined as:
where,
denotes the vector weights assigned to each feature,
b represents the terms that modify the decision boundary of the classifier. In terms of the configuration and setup of the classifiers, the MATLAB classification learner app is used to design, train, validate, and test the proposed classifiers. For the training process, the Bayesian optimization algorithm is utilized. However, in order to prevent the overfitting of the classification learner, we enabled the validation method as mentioned before. Furthermore, since the obtained data is not highly dimensional, there are only four features used for classification; thus, the principal component analysis (PCA) won’t be activated in the classification learner. The training parameters, such as learning rate, earlier stop the training, etc., were set based on the default. Regarding tuning the hyperparameters of the classifiers, each classifier has specific hyperparameters. For example, the type of kernel for SVM, number of trees for RF, value of k for KNN, number of hidden layers, layer size (number of neurons), and activation function for the ANN. Trail and test method is used to select the optimal hyperparameter of the proposed classifiers.
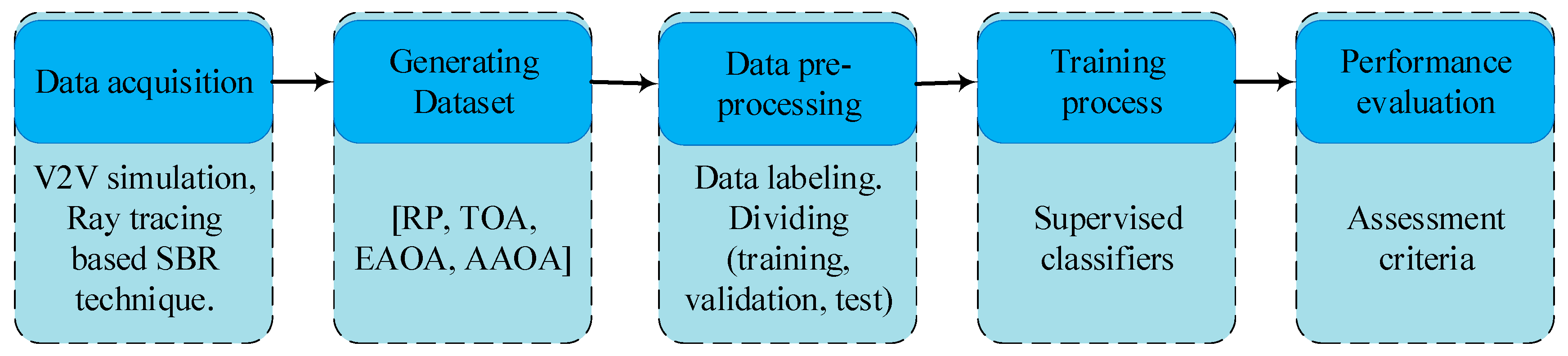
However, for comparative purposes, all the proposed classifiers are trained using the same training dataset. Then, the classifiers are validated by using the same validation data. Finally, the performance of each classifier is evaluated based on the same test data. The workflow of the proposed supervised classification method is shown in
Figure 4.
6. Conclusions
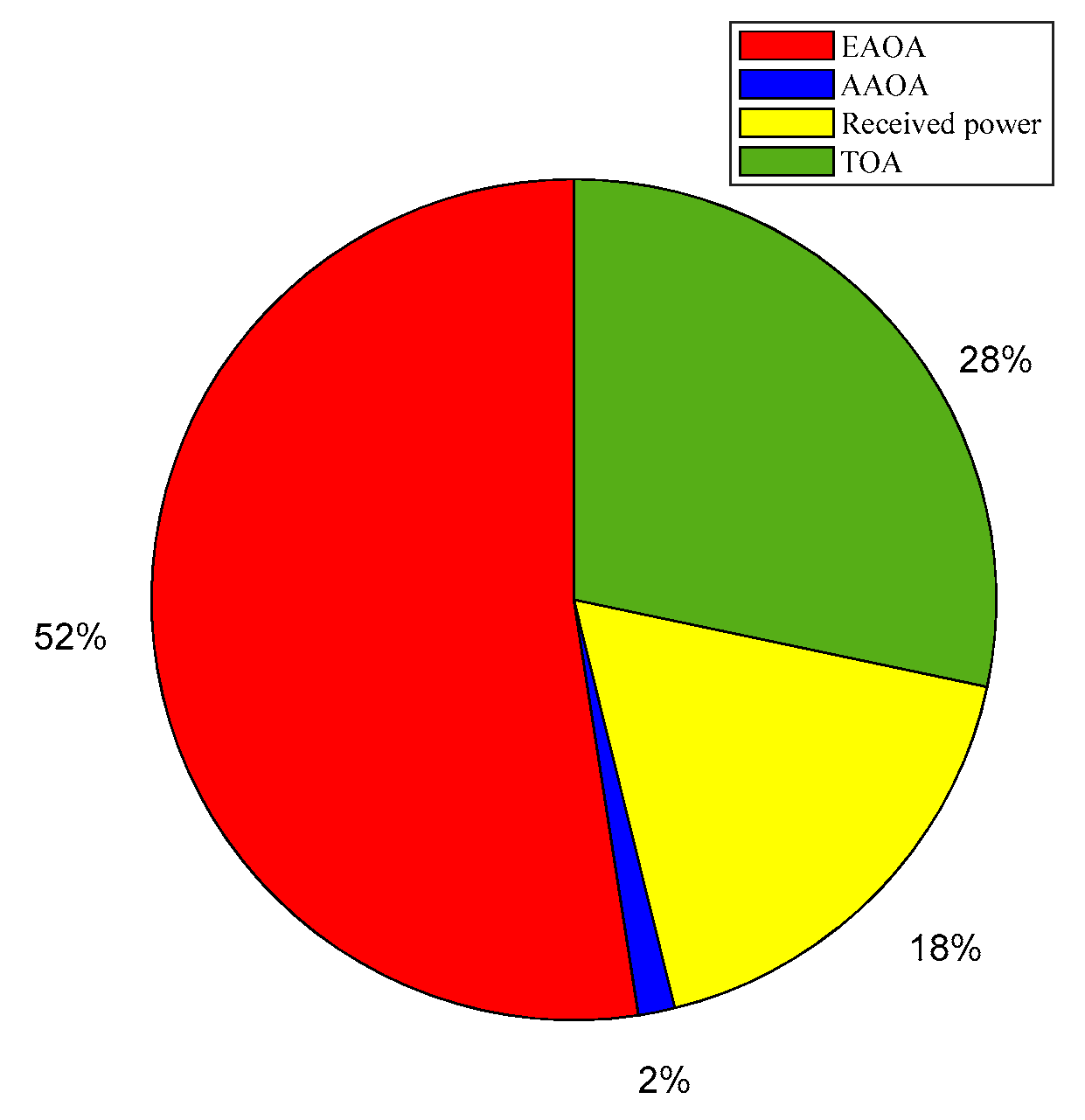
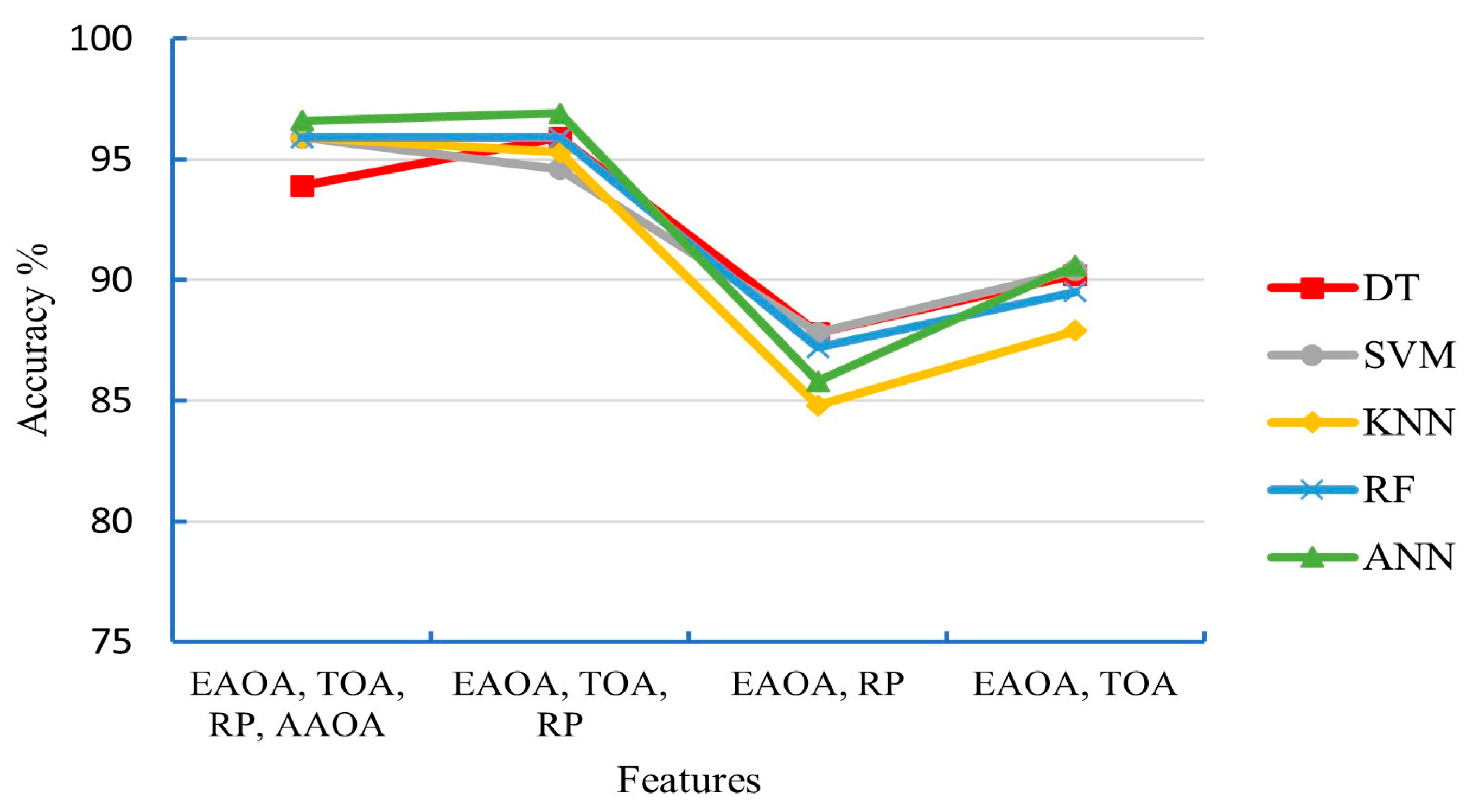
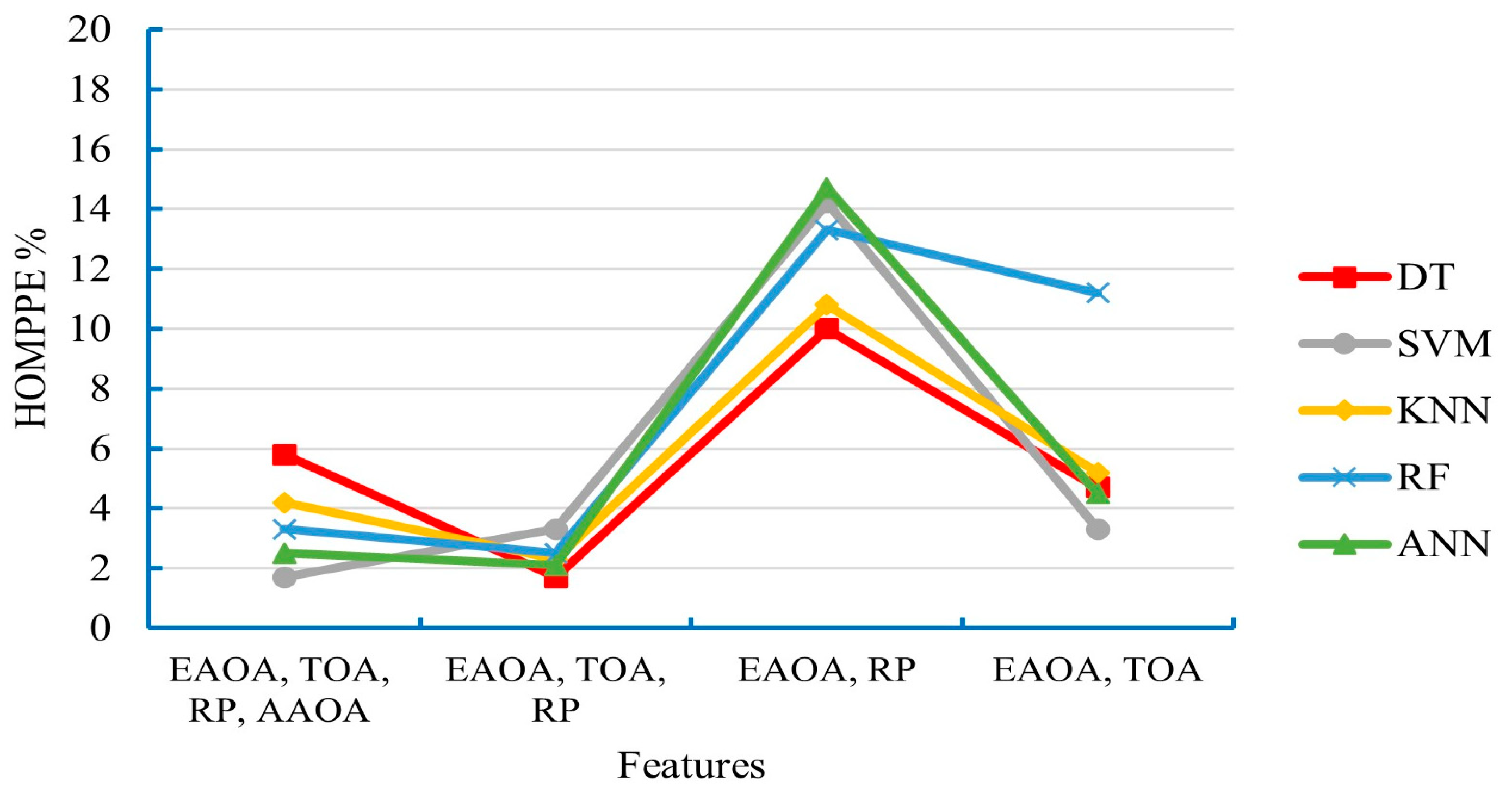
V2V localization technique based-geometric has been presented in various research breaking through the drawbacks of the GPS technology in urban environments. This technique relies mainly on utilizing the characteristics of the FOMPs. Mistakenly utilizing the HOMPs instead of the FOMPs is considered the most challenging issue in this technique. However, this work proposed a supervised ML classifiers to accurately distinguish between the FOMPs and HOMPs. The characteristics of the path propagation, that have been obtained from the predictions of the ray tracing based on the SBR technique, have been considered as input features of the training dataset. In this work, a statistical analysis of the obtained characteristics is presented first. Then, six supervised classifiers, namely DT, NB, SVM, KNN, RF, and ANN have been proposed and tested and their performance has been compared in terms of accuracy, precision, and HOMPPE. The comparison results showed that the accuracy of the proposed classifiers ranged from 87.8% to 96.5%. This means that the characteristics of the path propagation are efficient features for training the classifiers. The ANN classifier achieved the best performance, while the SVM classifier came in the second order. Whereas the NB achieved the worst performance. In terms of HOMPPE (HOMPs misclassification), it was 2.3% in the best classifier (i.e., ANN) and 16.7% in the worst classifier performance (i.e., NB). The impact of the training features selection on the performance of the proposed classifiers has been further investigated in this work. We concluded that the results of the statistical analysis are strongly consistent with the contribution of the training feature. In conclusion, distinguishing between FOMP and HOMP based on the proposed method using the characteristics of the propagation signal is more efficient and has a lower complexity compared to the traditional methods.
However, in this work, the considered features of the training dataset were directly extracted from the simulation. To improve the performance of the classifiers, we recommend involving more features for future work, such as the power delay profile of the received signal and the layout details of the surrounding area.


 and
and 











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}