

Dynamic Cooperation of Transportation and Power Distribution Networks via EV Fast Charging Stations



Abstract
:1. Introduction
1.1. Background
1.2. Literature Review
1.3. Main Contributions
- Compared with the former literature review, it constructs a DSO model based on the Wardrop II principle. This model involves transportation and electricity operators and realized cooperation between both operators. Different from the spontaneity of vehicle drivers described in Wardrop I, Wardrop II provides an opportunity for the transportation operator to dispatch vehicles at various time intervals.
- In addition, compared with the common DTA model, the model not only considers multiple O–D pairs and multiple vehicle types, but also multiple tasks. Multi-task is a middle class under multiple O–D pairs and over vehicle types. This class determines various departing times. It is useful in the logistical department. It can assign the departing and arriving times of transportation for various goods.
2. Mathematical Model
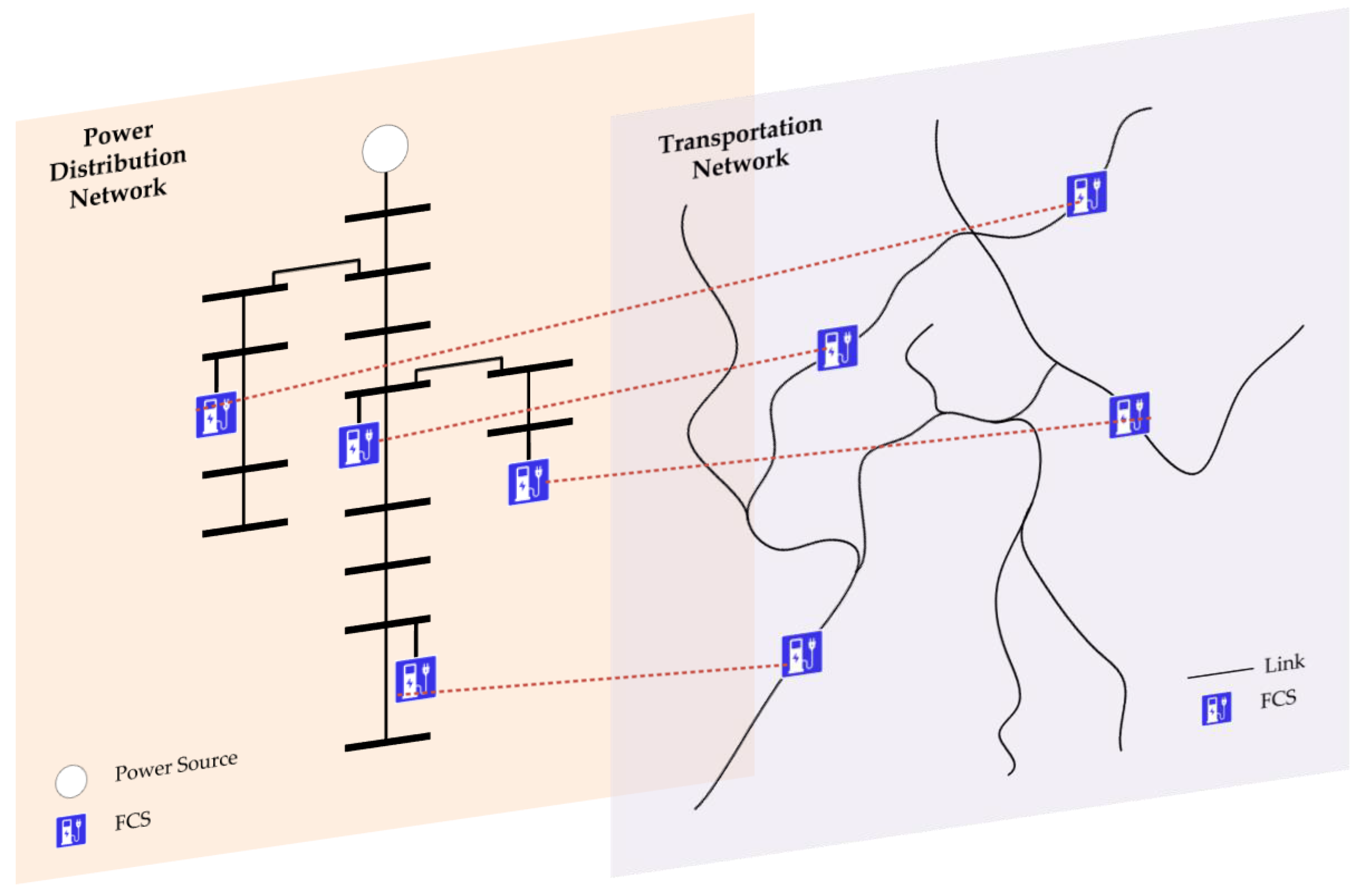
2.1. Model Structure
- DSO (modeling of TN)
- DOPF (modeling of PDN)
- FCS (modeling connecting two networks)
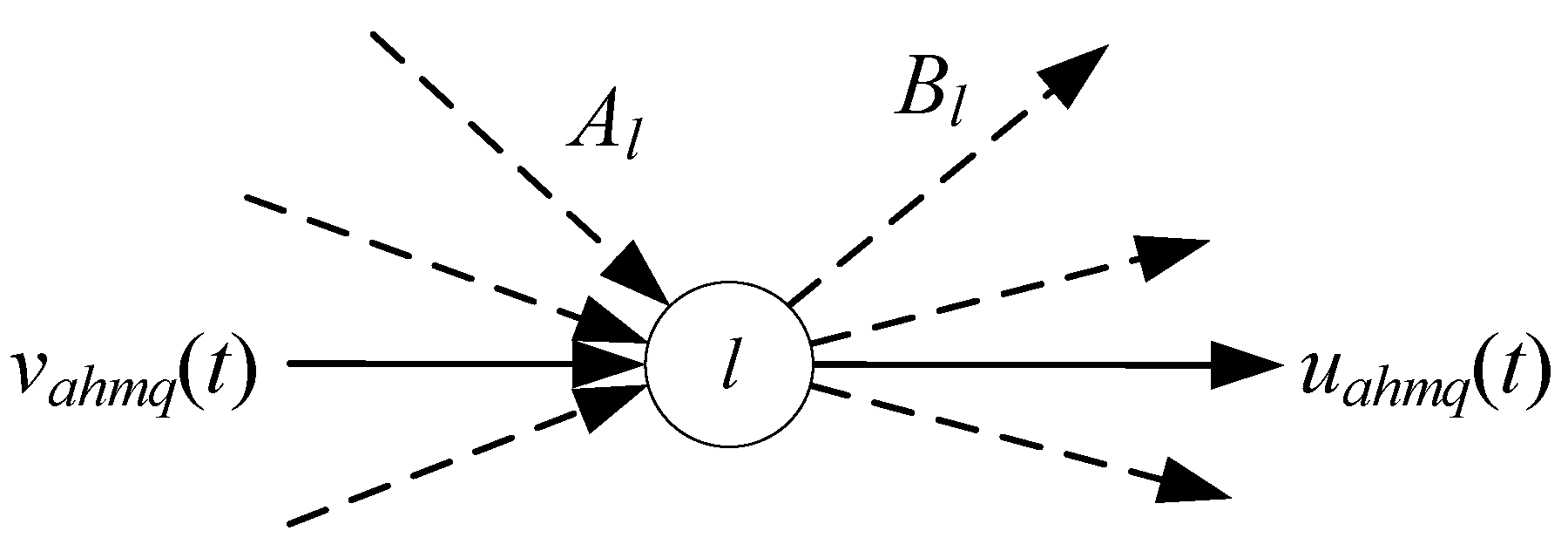
2.2. Modeling of TN
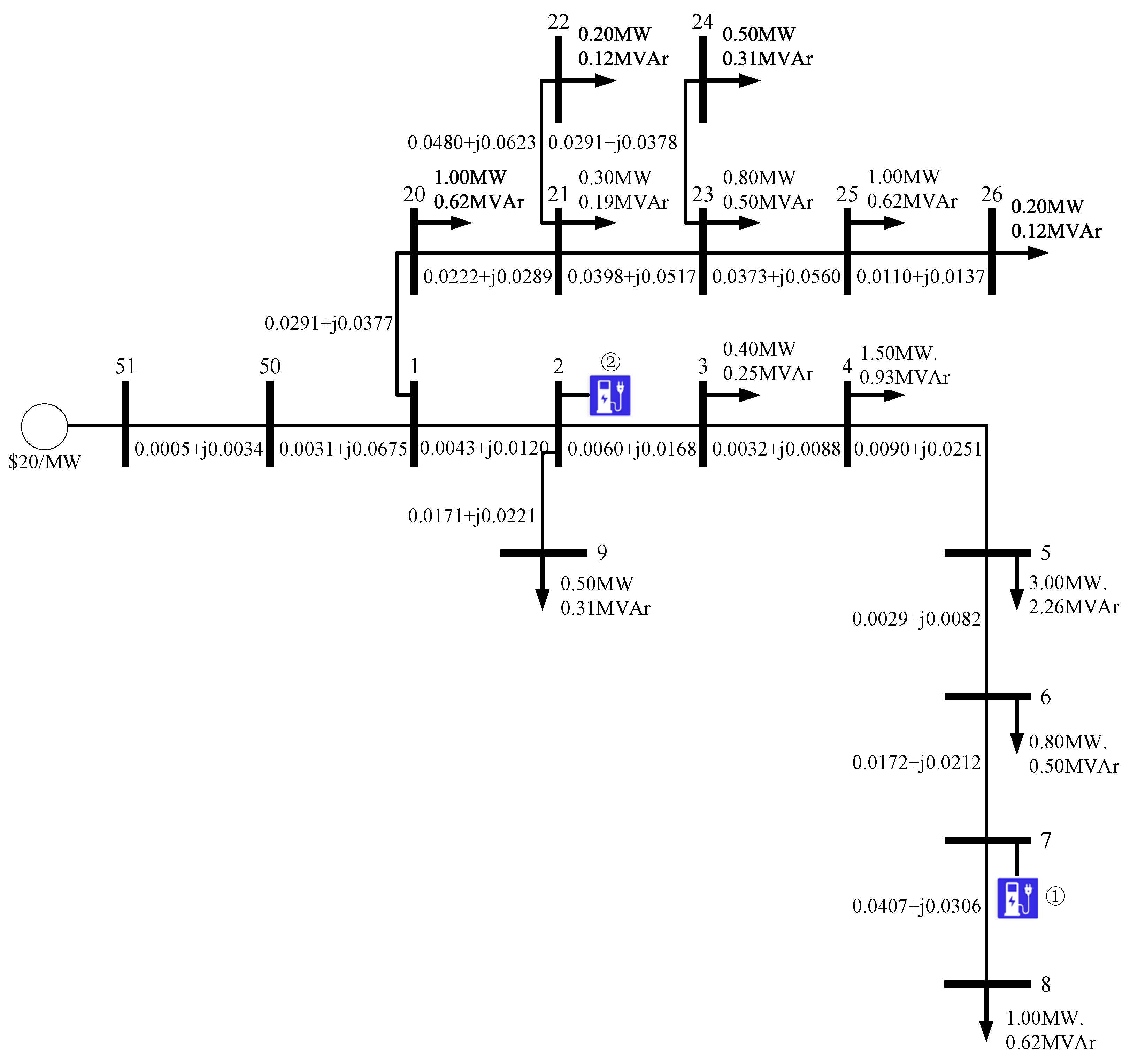
2.3. Modeling of PDN
2.4. Modeling of FCS
2.5. Multi-Objective Optimization
3. Results
3.1. Parameter Settings
3.2. Results and Analysis
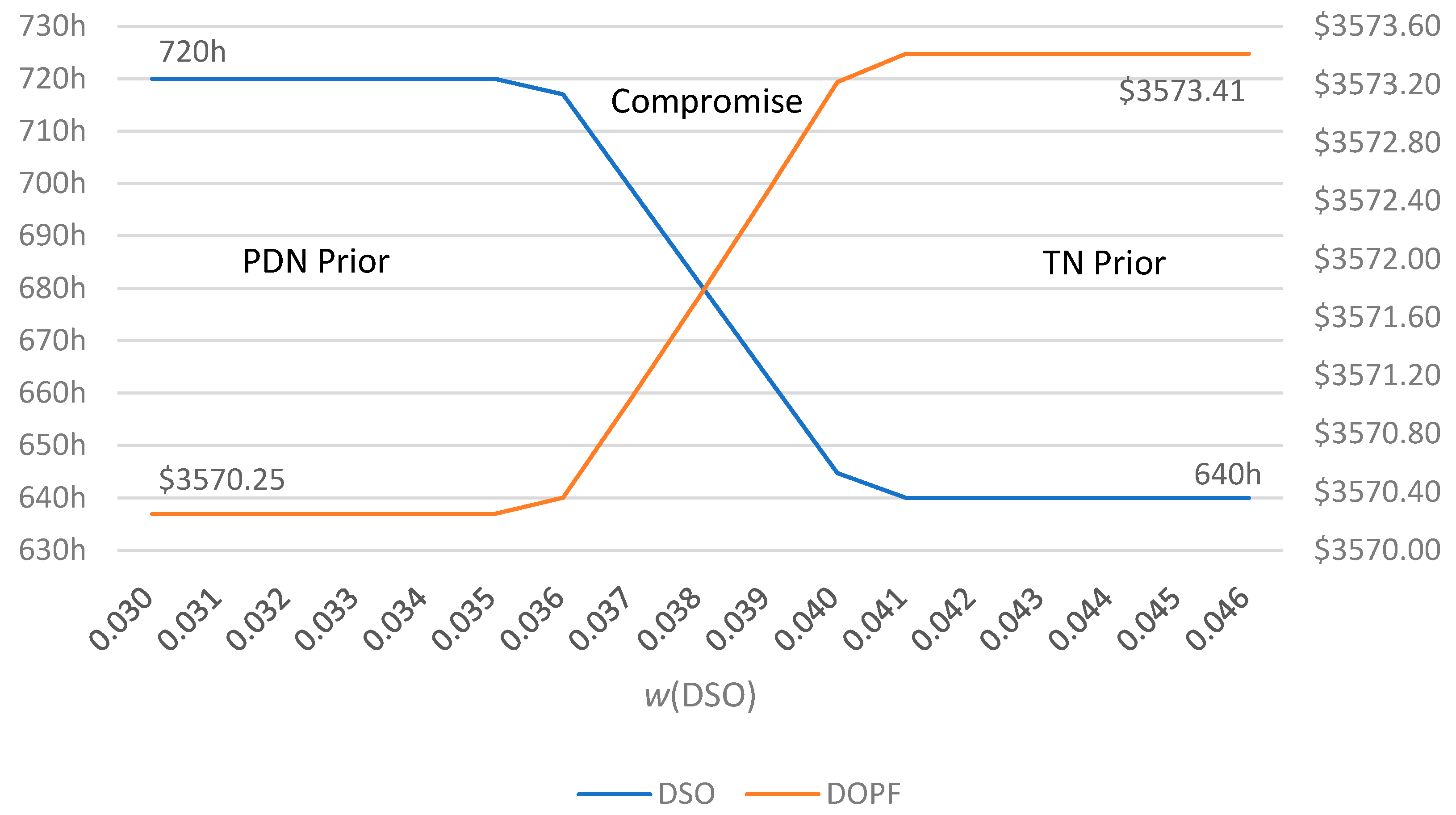
3.2.1. Optimal Solution versus Weight
3.2.2. Optimal Solution While TN Prior
3.2.3. Optimal Solution While PDN Prior
3.2.4. Changing Charging Power of FCS ②
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature and Abbreviations
| Notations in the Transportation Network Model | |
| Sets and Indices | |
| a | Link |
| Al | Set of links whose tail node is l (l ≠ r ∪ l ≠ s) |
| Ar | Set of links whose tail node is origin node r |
| As | Set of links whose tail node is destination node s |
| Bl | Set of links whose head node is node l (l ≠ r ∪ l ≠ s) |
| Br | Set of links whose head node is origin node r |
| Bs | Set of links whose head node is destination node s |
| ca[xa(t)] | Travel cost on link a |
| h | Task |
| l | Node excluding origin r and destination s |
| m | Vehicle type |
| q | Path |
| r | Origin node |
| s | Destination node |
| t | Time interval index |
| Charging time interval index of vehicle m at the charging station on link a | |
| Parameters | |
| da | Distance of link a |
| Em | Battery capacity of electric vehicle m |
| Total number of vehicle m in task h with origin r and destination s | |
| Total number of vehicle m in task h departing from origin r towards destination s | |
| Total number of vehicle m in task h arriving at destination s from origin r | |
| spm | Speed of vehicle m |
| τam | Link a travel time of vehicle m without congestion |
| T | Final time |
| w(DSO) | Weight of dynamic system optimal objective function |
| Variables | |
| Instantaneous departing flows of vehicle m number in task h departing from origin r towards destination s at time t | |
| Instantaneous arriving flows of vehicle m number in task h arriving at destination s from origin r at time t | |
| ua(t) | Total inflow rate on link a over path q at time t |
| Inflow rate on link a over path q which belongs to vehicle m number in task h from origin r and destination s at time t | |
| xa(t) | Total number of vehicles travelling on link a at time t |
| Number of vehicles on link a over path q which belong to vehicle m number in task h with origin r and destination s at time t | |
| va(t) | Total exit flow rate from link a at time t |
| Exit flow rate from link a over path q which belongs to vehicle m number in task h with origin r and destination s at time t | |
| Notations in the Power Distribution Network Model | |
| Sets and Indices | |
| fb | From bus |
| g | Generating unit |
| i | Bus i |
| j | Bus j |
| k | Bus k |
| tb | To bus |
| Parameter | |
| bij | Susceptance at branch from bus i to bus j |
| bj | Sum of susceptance caused by shunt capacitors at bus j |
| fb | From bus |
| Pgmin | Minimum real power output of unit g |
| Pgmax | Maximum real power output of unit g |
| Real load at bus j | |
| Pramp | Ramp of real power output per time frame |
| Qgmin | Minimum reactive power output of unit g |
| Qgmax | Maximum reactive power output of unit g |
| Reactive load at bus j | |
| Qramp | Ramp of reactive power output per time interval |
| rij | Resistance of branch from bus i to bus j |
| Sijmax | Complex power flow limit of branch ij. |
| Charging time of vehicle m in charging station on link a | |
| tb | To bus |
| Minimum value of square of voltage magnitude at bus i | |
| Maximum value of square of voltage magnitude at bus i | |
| w(DOPF) | Weight of dynamic optimal power flow objective function |
| xij | Reactance of branch from bus i to bus j |
| zij | Impedance of branch from bus i to bus j |
| Variables | |
| cg[Pg(t)] | Cost of real power output of unit g at time t |
| Complex current in branch from bus i to bus j at time t | |
| Conjugate complex current in branch from bus i to bus j at time t | |
| Square of current magnitude in branch from bus i to bus j at time t | |
| Pg(t) | Real power output of unit g at time t |
| Pij(t) | Real power flow of branch from bus i to bus j at time t |
| Pjk(t) | Real power flow of branch from bus j to bus k at time t |
| Real power output of unit g at bus j at time t | |
| Qg(t) | Reactive power output of unit g at time t |
| Qij(t) | Reactive power flow of branch from bus i to bus j at time t |
| Qjk(t) | Reactive power flow of branch from bus j to bus k at time t |
| Reactive power generation of unit g at bus j at time t | |
| Complex power flow of branch from bus i to bus j at time t | |
| Complex voltage at bus i at time t | |
| Complex voltage at bus j at time t | |
| Square of voltage magnitude at bus i at time t | |
| Square of voltage magnitude at bus j at time t | |
| Notations in the Fast Charging Station Model | |
| Parameter | |
| Distance from the charging station on link a to the link’s exit | |
| Real power of charging pile in charging station on link a | |
| Link travel time of vehicle m from the charging station on link a to the link’s exit without congestion | |
| Maximum number of vehicles charging in charging station on link a | |
| Variables | |
| Real power demand of charging station connecting to bus i at time t | |
| Reactive power demand of charging station connecting to bus j at time t | |
| Number of vehicles staying in charging station on link a | |
| Abbreviation | |
| AC | Alternating current |
| DOPF | Dynamic optimal power flow |
| DSO | Dynamic system optimal |
| DTA | Dynamic traffic assignment |
| DUO | Dynamic user optimal |
| EV | Electric vehicle |
| FCC | Flow conservation constraints |
| FCS | Fast charging station |
| FPC | Flow propagation constraints |
| GV | Gasoline vehicle |
| LFC | Load frequency control |
| LP | Linear programming |
| MILP | Mix-integer linear programming |
| MIQCP | Mix-integer quadratically constrained programming |
| O-D | Origin–destination |
| OPF | Optimal power flow |
| PDN | Power distribution network |
| PEV | Plug-in electric vehicle |
| PSO | Particle swarm optimization |
| SFIFO | Strong first-in-first-out |
| QCP | Quadratically constrained programming |
| SO | User optimal |
| SOC | State of charge |
| TA | Traffic assignment |
| TAP | Traffic assignment problem |
| TN | Transportation network |
| UE | User equilibrium |
References
- Graf, L.; Harks, T.; Palkar, P. Dynamic Traffic Assignment for Electric Vehicles. SSRN Electron. J. 2022, 1–42. [Google Scholar] [CrossRef]
- Xie, S.; Hu, Z.; Wang, J. Two-stage robust optimization for expansion planning of active distribution systems coupled with Urban Transportation Networks. Appl. Energy 2020, 261, 114412. [Google Scholar] [CrossRef]
- Abdmouleh, Z.; Alammari, R.A.M.; Gastli, A. Review of policies encouraging renewable energy integration & best practices. Renew. Sustain. Energy Rev. 2015, 45, 249–262. [Google Scholar] [CrossRef]
- Tan, Z.; Chen, K.; Ju, L.; Liu, P.; Zhang, C. Issues and solutions of China’s generation resource utilization based on sustainable development. J. Mod. Power Syst. Clean Energy 2016, 4, 147–160. [Google Scholar] [CrossRef]
- Zhou, Y.; Wang, M.; Hao, H.; Johnson, L.; Wang, H.; Hao, H. Plug-in electric vehicle market penetration and incentives: A global review. Mitig. Adapt. Strateg. Glob. Chang. 2014, 20, 777–795. [Google Scholar] [CrossRef]
- Wei, W.; Wu, D.; Wu, Q.; Shafie-Khah, M.; Catalão, J.P.S. Interdependence between transportation system and power distribution system: A comprehensive review on models and applications. J. Mod. Power Syst. Clean Energy 2019, 7, 433–448. [Google Scholar] [CrossRef]
- Zhao, T.; Yan, H.; Liu, X.; Ding, Z. Congestion-aware Dynamic Optimal Traffic Power Flow in Coupled Transportation Power Systems. IEEE Trans. Ind. Inform. 2022, 19, 1833–1843. [Google Scholar] [CrossRef]
- McKerracher, C.; O’Donovan, A.; Soulopoulos, N.; Grant, A.; Mi, S.; Doherty, D.; Fisher, R.; Cantor, C.; Lyu, J.; Ampofo, K.; et al. Electric Vehicle Outlook 2022; BloombergNEF: London, UK, 2022. [Google Scholar]
- Dong, J.; Liu, C.; Lin, Z. Charging infrastructure planning for promoting battery electric vehicles: An activity-based approach using multiday travel data. Transp. Res. Part C Emerg. Technol. 2014, 38, 44–55. [Google Scholar] [CrossRef]
- Aggarwal, S.; Singh, A.K. Impact analysis of electric vehicle charging station integration with distributed generators on power systems. Int. J. Circuit Theory Appl. 2021, 49, 1811–1827. [Google Scholar] [CrossRef]
- Zhang, H.; Moura, S.J.; Hu, Z.; Song, Y. PEV Fast-Charging Station Siting and Sizing on Coupled Transportation and Power Networks. IEEE Trans. Smart Grid 2016, 9, 2595–2605. [Google Scholar] [CrossRef]
- Wei, W.; Wu, L.; Wang, J.; Mei, S. Network Equilibrium of Coupled Transportation and Power Distribution Systems. IEEE Trans. Smart Grid 2018, 9, 6764–6779. [Google Scholar] [CrossRef]
- Gan, W.; Yan, M.; Yao, W.; Zhang, L. Coordinated Planning of Transportation and Electric Power Networks with the Proliferation of Electric Vehicles. IEEE Trans. Smart Grid 2020, 11, 4005–4016. [Google Scholar] [CrossRef]
- Galus, M.D.; Waraich, R.A.; Noembrini, F.; Steurs, K.; Georges, G.; Boulouchos, K.; Axhausen, K.W.; Andersson, G. Integrating power systems, transport systems and vehicle technology for electric mobility impact assessment and efficient control. IEEE Trans. Smart Grid 2012, 3, 934–949. [Google Scholar] [CrossRef]
- Xiong, J.; Zhang, K.; Guo, Y.; Su, W. Investigate the impacts of PEV charging facilities on integrated electric distribution system and electrified transportation system. IEEE Trans. Transp. Electrif. 2015, 1, 178–187. [Google Scholar] [CrossRef]
- Kezunovic, M.; Waller, S.T. PHEVs and BEVs in Coupled Power and Transportation Systems. In Transportation Technologies for Sustainability; Springer: New York, NY, USA, 2013; pp. 851–869. [Google Scholar] [CrossRef]
- Wang, H.; Fang, Y.-P.; Zio, E. Risk Assessment of an Electrical Power System Considering the Influence of Traffic Congestion on a Hypothetical Scenario of Electrified Transportation System in New York State. IEEE Trans. Intell. Transp. Syst. 2021, 22, 142–155. [Google Scholar] [CrossRef]
- Yong, J.Y.; Ramachandaramurthy, V.K.; Tan, K.M.; Mithulananthan, N. A review on the state-of-the-art technologies of electric vehicle, its impacts and prospects. Renew. Sustain. Energy Rev. 2015, 49, 365–385. [Google Scholar] [CrossRef]
- Shao, C.; Li, K.; Qian, T.; Shahidehpour, M.; Wang, X. Generalized User Equilibrium for Coordination of Coupled Power-Transportation Network. IEEE Trans. Smart Grid 2022, 1–11. [Google Scholar] [CrossRef]
- Zhang, R.; Yao, E.; Zhang, Y. Multi-modal dynamic traffic assignment model with the addition of electric vehicles. J. Automot. Saf. Energy 2021, 12, 540–550. [Google Scholar] [CrossRef]
- International Energy Agency (IEA). Global EV Outlook 2022; International Energy Agency (IEA): Paris, France, 2022.
- Wardrop, J.G. Some Theoretical Aspects of Road Traffic Research. OR 1953, 4, 72–73. [Google Scholar] [CrossRef]
- Beckman, M.; McGuire, C.B.; Winsten, C.B.; Koopmans, T.C. Studies in the Economics of Transportation. Oper. Res. Q. 1956, 7, 146. [Google Scholar] [CrossRef]
- Merchant, D.K.; Nemhauser, G.L. A Model and an Algorithm for the Dynamic Traffic Assignment Problems. Transp. Sci. 1978, 12, 183–199. [Google Scholar] [CrossRef]
- Merchant, D.K.; Nemhauser, G.L. Optimality Conditions for a Dynamic Traffic Assignment Model. Transp. Sci. 1978, 12, 200–207. [Google Scholar] [CrossRef]
- Gao, Z.; Ren, H. Dynamic Traffic Assignment Problems in Urban Transportation Networks: Models and Methods; China Communications Press: Beijing, China, 2005. [Google Scholar]
- Ho, J.K. A Successive Linear Optimization Approach to the Dynamic Traffic Assignment Problem. Transp. Sci. 1980, 14, 295–305. [Google Scholar] [CrossRef]
- Carey, M. Optimal Time-Varying Flows on Congested Networks. Oper. Res. 1987, 35, 58–69. [Google Scholar] [CrossRef]
- Ran, B.; Boyce, D.E. Modeling Dynamic Transportation Networks: An Intelligent Transportation System Oriented Approach; Springer: Berlin/Heidelberg, Germany, 1996. [Google Scholar]
- Newell, G.F. Traffic Flow on Transportation Networks; The MIT Press: Cambridge, MA, USA; London, UK, 1980. [Google Scholar]
- Ben-Akiva, M.; De Palma, A.; Kanaroglou, P. Dynamic model of peak period traffic congestion with elastic arrival rates. Transp. Sci. 1986, 20, 164–181. [Google Scholar] [CrossRef]
- Zou, Q.; Chen, S. Enhancing resilience of interdependent traffic-electric power system. Reliab. Eng. Syst. Saf. 2019, 191, 106557. [Google Scholar] [CrossRef]
- Zhou, Z.; Zhang, X.; Guo, Q.; Sun, H. Integrated Pricing Framework for optimal power and semi-dynamic traffic flow problem. IET Renew. Power Gener. 2020, 14, 3636–3643. [Google Scholar] [CrossRef]
- Yang, W.; Liu, W.; Chung, C.Y.; Wen, F. Joint Planning of EV Fast FCSs and Power Distribution Systems with Balanced Traffic Flow Assignment. IEEE Trans. Ind. Inform. 2021, 17, 1795–1809. [Google Scholar] [CrossRef]
- Li, J.; Xu, X.; Yan, Z.; Wang, H.; Chen, Y. Dynamic Interaction of Transportation and Distribution Networks with Electric Vehicles. arXiv 2021, arXiv:2112.04683. [Google Scholar]
- Zhou, Z.; Zhang, X.; Guo, Q.; Sun, H. Analyzing power and dynamic traffic flows in coupled power and transportation networks. Renew. Sustain. Energy Rev. 2021, 135, 110083. [Google Scholar] [CrossRef]
- Sadhu, K.; Haghshenas, K.; Rouhani, M.; Aiello, M. Optimal joint operation of coupled transportation and power distribution urban networks. Energy Inform. 2022, 5, 35. [Google Scholar] [CrossRef]
- Hu, Z.; Liu, S.; Luo, W.; Wu, L. Intrusion-Detector-Dependent Distributed Economic Model Predictive Control for Load Frequency Regulation with PEVs under Cyber Attacks. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 3857–3868. [Google Scholar] [CrossRef]
- Hu, Z.; Liu, J.; Gao, S.; Liu, F.; Wu, L. Resilient Distributed Frequency Estimation for PEVs Coordinating in Load Frequency Regulation under Cyber Attacks. In Proceedings of the 2021 IEEE 30th International Symposium on Industrial Electronics, Kyoto, Japan, 20–23 June 2021. [Google Scholar]
- Wu, K.; Wen, S.; Sun, Z. Resilient Event-Triggered Distributed Electric Vehicles Charging Scheduling against Cyber Attacks. In Proceedings of the 2022 41st Chinese Control Conference, Hefei, China, 25–27 July 2022; pp. 4543–4550. [Google Scholar]
- Li, B.; Chen, Y.; Wei, W.; Huang, S.; Mei, S. Resilient Restoration of Distribution Systems in Coordination with Electric Bus Scheduling. IEEE Trans. Smart Grid 2021, 12, 3314–3325. [Google Scholar] [CrossRef]
- Grady, W.M.; Samotyj, M.J.; Noyola, A.H. The application of network objective functions for actively minimizing the impact of voltage harmonics in power systems. IEEE Trans. Power Deliv. 1992, 7, 1379–1386. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wardrop I | Wardrop II | |
|---|---|---|
| TA (static) | UE | SO |
| DTA (dynamic) | DUO | DSO |
| 1 | 2 | 3 | ||||||
| = 0 | 0 | 0 | 0 | |||||
| = 0 | 0 | 0 | 0 | |||||
| = 1 | 0 | 0 | 1 | |||||
| = 3 | 0 | 1 | 2 | |||||
| = 6 | 1 | 2 | 3 | |||||
| = 5 | 2 | 3 | ||||||
| = 3 | 3 | |||||||
| = 0 | ||||||||
| 1 | 2 | 3 |
| a | a′ | b | b′ | c | c′ | d | d′ | e | e′ | |
|---|---|---|---|---|---|---|---|---|---|---|
| da (km) | 120 | 120 | 120 | 120 | 120 | 120 | 120 | 120 | 240 | 240 |
| (km) | 0 | 120 | 120 | 120 |
| m | Type | Em (kWh) | spm (km/h) |
|---|---|---|---|
| 1 | GV | 0 | 120 |
| 2 | EV | 60 | 120 |
| Station | Bus | (kW) | Link 1 | (km) | Link 2 | (km) | ||
|---|---|---|---|---|---|---|---|---|
| ① | 7 | 30 | a | 15 | 0 | a′ | 15 | 120 |
| ② | 2 | 30 | e | 15 | 120 | e′ | 15 | 120 |
| rs | h(t) | q | a | a′ | b | b′ | c | c′ | d | d′ | e | e′ | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 14 | 1 (0–10) | 1(40) | 1 | 1 | 1 | ||||||||
| 2 | 1 | 1 | 1 | ||||||||||
| 3 | 1 | 1 | 1 | ||||||||||
| 4 | 1 | 1 | |||||||||||
| 2(20) | 1 | 2 | 1 | ||||||||||
| 2 | 2 | 1 | 1 | ||||||||||
| 3 | 1 | 1 | 2 | ||||||||||
| 4 | 1 | 2 | |||||||||||
| 2 (4–14) | 1(40) | 1 | 1 | 1 | |||||||||
| 2 | 1 | 1 | 1 | ||||||||||
| 3 | 1 | 1 | 1 | ||||||||||
| 4 | 1 | 1 | |||||||||||
| 2(20) | 1 | 2 | 1 | ||||||||||
| 2 | 2 | 1 | 1 | ||||||||||
| 3 | 1 | 1 | 2 | ||||||||||
| 4 | 1 | 2 | |||||||||||
| 41 | 1 (0–10) | 1(40) | 1 | 1 | 1 | ||||||||
| 2 | 1 | 1 | 1 | ||||||||||
| 3 | 1 | 1 | 1 | ||||||||||
| 4 | 1 | 1 | |||||||||||
| 2(20) | 1 | 2 | 1 | ||||||||||
| 2 | 1 | 1 | 2 | ||||||||||
| 3 | 2 | 1 | 1 | ||||||||||
| 4 | 1 | 2 | |||||||||||
| 2 (4–14) | 1(40) | 1 | 1 | 1 | |||||||||
| 2 | 1 | 1 | 1 | ||||||||||
| 3 | 1 | 1 | 1 | ||||||||||
| 4 | 1 | 1 | |||||||||||
| 2(20) | 1 | 2 | 1 | ||||||||||
| 2 | 1 | 1 | 2 | ||||||||||
| 3 | 2 | 1 | 1 | ||||||||||
| 4 | 1 | 2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Z.; Han, B.; Xue, F.; Lu, S.; Jiang, L. Dynamic Cooperation of Transportation and Power Distribution Networks via EV Fast Charging Stations. World Electr. Veh. J. 2023, 14, 38. https://doi.org/10.3390/wevj14020038
Chen Z, Han B, Xue F, Lu S, Jiang L. Dynamic Cooperation of Transportation and Power Distribution Networks via EV Fast Charging Stations. World Electric Vehicle Journal. 2023; 14(2):38. https://doi.org/10.3390/wevj14020038
Chicago/Turabian StyleChen, Zihao, Bing Han, Fei Xue, Shaofeng Lu, and Lin Jiang. 2023. "Dynamic Cooperation of Transportation and Power Distribution Networks via EV Fast Charging Stations" World Electric Vehicle Journal 14, no. 2: 38. https://doi.org/10.3390/wevj14020038
APA StyleChen, Z., Han, B., Xue, F., Lu, S., & Jiang, L. (2023). Dynamic Cooperation of Transportation and Power Distribution Networks via EV Fast Charging Stations. World Electric Vehicle Journal, 14(2), 38. https://doi.org/10.3390/wevj14020038