

Research on the Multimode Switching Control of Intelligent Suspension Based on Binocular Distance Recognition

Abstract
:1. Introduction
2. System Modeling
2.1. Vehicle Dynamics Modeling
2.2. Mathematical Model of the Magnetorheological Dampers
2.3. Road-Surface Input Model
3. Design of the Target-Distance-Recognition Method Based on the Binocular Camera
3.1. Speed-Bump-Detection Model Based on Deep Learning
3.2. Algorithm for Detecting the Start Point of a Circular Curve at the Lane Line
3.2.1. Lane Line Detection
3.2.2. Lane Line Positioning
3.2.3. Lane Line Fitting
3.2.4. Kalman Filtering
3.2.5. Lane-Line Curve Start-Point Location Detection
3.3. Target-Distance-Recognition Algorithm
4. Design of the Intelligent Suspension Control System
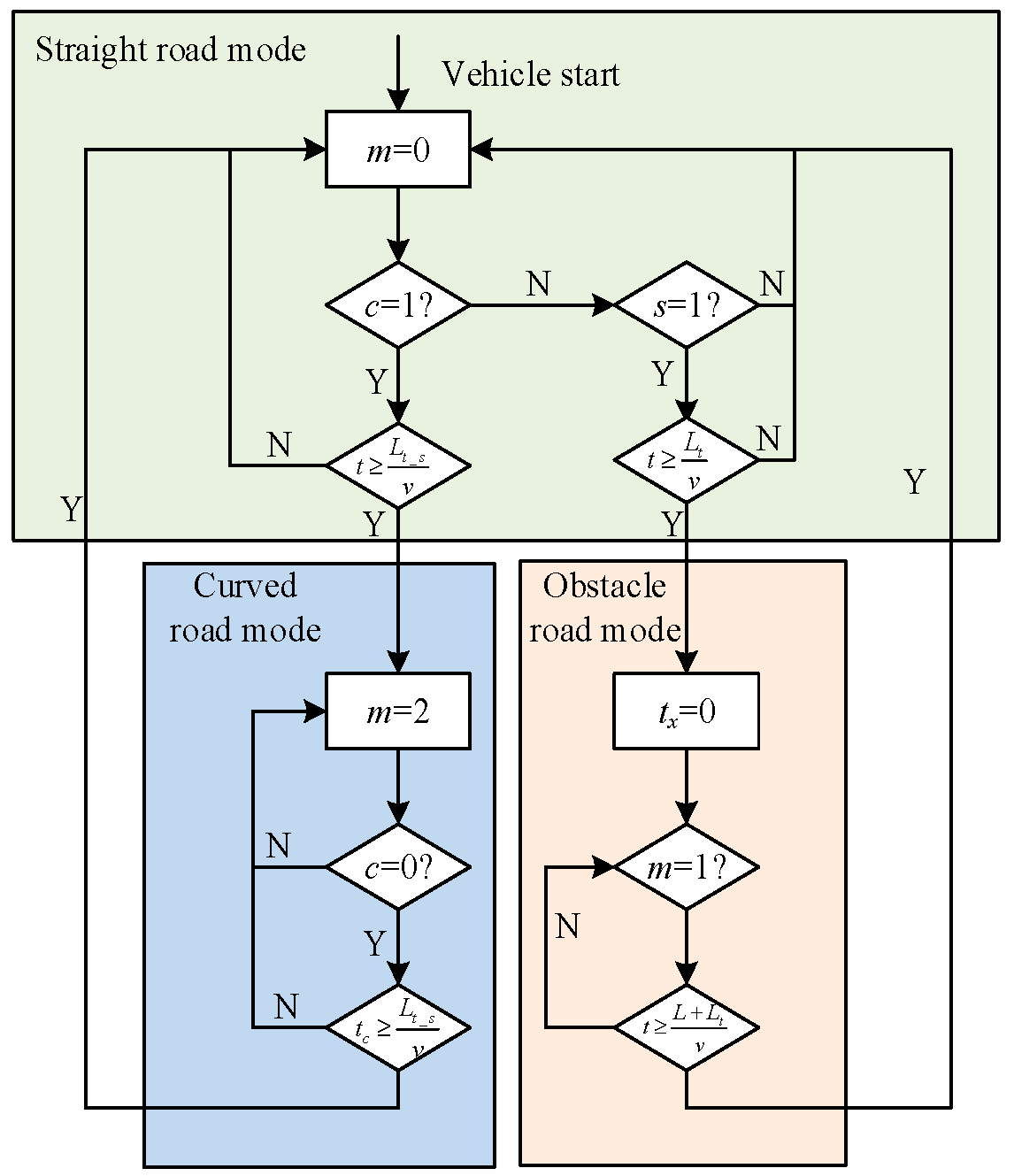
4.1. Mode Switching
4.2. BP-PID Controller Design
4.3. Parameter Optimization
4.3.1. Improvement of the Salp Swarm Algorithm
4.3.2. Force Distributor Design
4.4. Simulation Results and Analysis
5. HIL Experiment
6. Conclusions
- (1)
- The effectiveness of the control method needs to be further verified from the perspective of a real vehicle. Due to the lack of a real vehicle equipped with a magnetorheological semiactive suspension, and the time relationship, this paper only carries out MIL and HIL experiments through Simulink and Carsim, and does not carry out real-vehicle tests.
- (2)
- This paper makes less use of the function of the binocular camera. As a sensor, it can measure the 3D point cloud so that it has a powerful function that is not inferior to Laser Radar. By using the binocular camera to realize the real-time scanning of the front terrain, it can provide richer road-surface information for the suspension control algorithm, and realize the suspension control algorithm with a more excellent effect.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, M.; Li, J.; Li, G.; Xu, J. Analysis of Active Suspension Control Based on Improved Fuzzy Neural Network PID. World Electr. Veh. J. 2022, 13, 226. [Google Scholar] [CrossRef]
- Zheng, X.; Zhang, H.; Yan, H.; Yang, F.; Wang, Z.; Vlacic, L. Active Full-Vehicle Suspension Control via Cloud-Aided Adaptive Backstepping Approach. IEEE Trans. Cybern. 2020, 50, 3113–3124. [Google Scholar] [CrossRef]
- Haemers, M.; Derammelaere, S.; Ionescu, C.M.; Stockman, K.; Viaene, J.D.; Verbelen, F. Proportional-Integral State-Feedback Controller Optimization for a Full-Car Active Suspension Setup using a Genetic Algorithm. IFAC-PapersOnLine 2018, 51, 1–6. [Google Scholar] [CrossRef]
- Scharstein, D.; Szeliski, R. A Taxonomy and Evaluation of Dense Two-Frame Stereo Correspondence Algorithms. Int. J. Comput. Vis. 2002, 47, 7–42. [Google Scholar] [CrossRef]
- Lu, Y.; Zou, L.; Chen, Y.; Mao, Y.; Zhu, J.; Lin, W.; Wu, D.; Chen, R.; Qu, J.; Zhou, J. Rapid Alternate Flicker Modulates Binocular Interaction in Adults With Abnormal Binocular Vision. Investig. Ophthalmol. Vis. Sci. 2023, 64, 15. [Google Scholar] [CrossRef] [PubMed]
- Blake, R.; Wilson, H. Binocular vision. Vis. Res. 2011, 51, 754–770. [Google Scholar] [CrossRef] [PubMed]
- Yuan, J.; Zhang, G.; Li, F.; Liu, J.; Xu, L.; Wu, S.; Jiang, T.; Guo, D.; Xie, Y. Independent Moving Object Detection Based on a Vehicle Mounted Binocular Camera. IEEE Sens. J. 2021, 21, 11522–11531. [Google Scholar] [CrossRef]
- Rovira-Más, F.; Wang, Q.; Zhang, Q. Design parameters for adjusting the visual field of binocular stereo cameras. Biosyst. Eng. 2010, 105, 59–70. [Google Scholar] [CrossRef]
- Ding, J.; Klein, S.A.; Levi, D.M. Binocular combination in abnormal binocular vision. J. Vis. 2013, 13, 14. [Google Scholar] [CrossRef]
- Hu, G.; Liao, M.; Li, W. Analysis of a compact annular-radial-orifice flow magnetorheological valve and evaluation of its performance. J. Intell. Mater. Syst. Struct. 2017, 28, 1322–1333. [Google Scholar] [CrossRef]
- Brooks, D.A. High Performance Electro-Rheological Dampers. Int. J. Mod. Phys. B 1999, 13, 2127–2134. [Google Scholar] [CrossRef]
- Tang, J.; Dai, W.; Archer, C.; Yi, J.; Zhu, G. Borderline knock adaptation based on online updated surrogate models. Int. J. Engine Res. 2022, 24, 2958–2972. [Google Scholar] [CrossRef]
- Ye, H.; Zheng, L. Comparative study of semi-active suspension based on LQR control and H2/H∞ multi-objective control. In Proceedings of the 2019 Chinese Automation Congress (CAC), Hangzhou, China, 22–24 November 2019; pp. 3901–3906. [Google Scholar]
- Tang, J.; Dai, W.; Archer, C.; Yi, J.; Zhu, G. Cycle-based LQG knock control using identified exhaust temperature model. Int. J. Engine Res. 2022, 24, 3047–3060. [Google Scholar] [CrossRef]
- Li, H.; Yu, J.; Hilton, C.; Liu, H. Adaptive Sliding-Mode Control for Nonlinear Active Suspension Vehicle Systems Using T–S Fuzzy Approach. IEEE Trans. Ind. Electron. 2013, 60, 3328–3338. [Google Scholar] [CrossRef]
- Li, H.; Jing, X.; Lam, H.K.; Shi, P. Fuzzy Sampled-Data Control for Uncertain Vehicle Suspension Systems. IEEE Trans. Cybern. 2014, 44, 1111–1126. [Google Scholar] [CrossRef] [PubMed]
- Xu, C.; Xie, F.; Zhou, R.; Huang, X.; Cheng, W.; Tian, Z.; Li, Z. Vibration analysis and control of semi-active suspension system based on continuous damping control shock absorber. J. Braz. Soc. Mech. Sci. Eng. 2023, 45, 341. [Google Scholar] [CrossRef]
- Wang, M.; Pang, H.; Wang, P.; Luo, J. BP neural network and PID combined control applied to vehicle active suspension system. In Proceedings of the 2021 40th Chinese Control Conference (CCC), Shanghai, China, 26–28 July 2021; pp. 8187–8192. [Google Scholar]
- Qiu, R. Adaptive Control of Vehicle Active Suspension Based on Neural Network Optimization. In Proceedings of the 2021 7th International Conference on Energy Materials and Environment Engineering (ICEMEE 2021), Zhangjiajie, China, 23–25 April 2020; Volume 261. [Google Scholar]
- Khan, L.; Qamar, S.; Khan, U. Adaptive PID control scheme for full car suspension control. J. Chin. Inst. Eng. 2016, 39, 169–185. [Google Scholar] [CrossRef]
- Bender, E.K. Optimum Linear Preview Control With Application to Vehicle Suspension. J. Basic Eng. 1968, 90, 213–221. [Google Scholar] [CrossRef]
- Louam, N.; Wilson, D.A.; Sharp, R.S. Optimization and Performance Enhancement of Active Suspensions for Automobiles under Preview of the Road. Veh. Syst. Dyn. 2007, 21, 39–63. [Google Scholar] [CrossRef]
- Gohrle, C.; Schindler, A.; Wagner, A.; Sawodny, O. Design and Vehicle Implementation of Preview Active Suspension Controllers. IEEE Trans. Control Syst. Technol. 2014, 22, 1135–1142. [Google Scholar] [CrossRef]
- Li, P.; Lam, J.; Cheung, K.C. Multi-objective control for active vehicle suspension with wheelbase preview. J. Sound Vib. 2014, 333, 5269–5282. [Google Scholar] [CrossRef]
- Choi, S.-B.; Lee, S.-K.; Park, Y.-P. A Hysteresis Model for the Field-Dependent Damping Force of a Magnetorheological Damper. J. Sound Vib. 2001, 245, 375–383. [Google Scholar] [CrossRef]
- Zhao, Q.; Zhu, B. Multi-objective optimization of active suspension predictive control based on improved PSO algorithm. J. Vibroeng. 2019, 21, 1388–1404. [Google Scholar] [CrossRef]
- Zhang, L.; Yin, X.; Shen, J.; Yu, H. Cloud-aided moving horizon state estimation of a full-car semi-active suspension system. In Proceedings of the 2016 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Budapest, Hungary, 9–12 October 2016; pp. 527–532. [Google Scholar]
- Mahendru, M.; Dubey, S.K. Real Time Object Detection with Audio Feedback using Yolo vs. Yolo_v3. In Proceedings of the 2021 11th International Conference on Cloud Computing, Data Science & Engineering (Confluence), Noida, India, 28–29 January 2021; pp. 734–740. [Google Scholar]
- Troelstra, M.A.; Van Dijk, A.-M.; Witjes, J.J.; Mak, A.L.; Zwirs, D.; Runge, J.H.; Verheij, J.; Beuers, U.H.; Nieuwdorp, M.; Holleboom, A.G.; et al. Self-supervised neural network improves tri-exponential intravoxel incoherent motion model fitting compared to least-squares fitting in non-alcoholic fatty liver disease. Front. Physiol. 2022, 13, 942495. [Google Scholar] [CrossRef] [PubMed]
- Mohammed-Azizi, B.; Mouloudj, H. Least-squares fitting applied to nuclear mass formulas. Solution by the Gauss–Seidel method. Int. J. Mod. Phys. C 2022, 33, 2250076. [Google Scholar] [CrossRef]
- Wang, T.; Tao, X.; Zhang, J.; Li, Y. Predicting Traffic Congestion Time Based on Kalman Filter Algorithm. Adv. Res. Rev. 2020, 1. [Google Scholar] [CrossRef]
- Mirjalili, S.; Gandomi, A.H.; Mirjalili, S.Z.; Saremi, S.; Faris, H.; Mirjalili, S.M. Salp Swarm Algorithm: A bio-inspired optimizer for engineering design problems. Adv. Eng. Softw. 2017, 114, 163–191. [Google Scholar] [CrossRef]
- Soeiro, L.G.G.; Filho, B.J.C. Vehicle Power System Modeling and Integration in Hardware-in-the-Loop (HIL) Simulations. Machines 2023, 11, 605. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Precision | F1 Score | Recall | mAP | AP | |
|---|---|---|---|---|---|
| IoU = 0.5 | 98.57% | 0.99 | 98.57% | 98.53% | 98.53% |
| Control Mode | Left Front | Right Front | Left Rear | Right Rear |
|---|---|---|---|---|
| Straight Road Mode | 0.951 | 0.986 | 0.933 | 0.915 |
| Obstacle Road Mode | 0.986 | 0.978 | −0.948 | −0.954 |
| Curved Road Mode | −0.972 | 0.961 | −0.981 | 0.986 |
| Droop Acceleration | Roll-Angle Acceleration | Pitch-Angle Acceleration | Dynamic Deflection of Left Front | Dynamic Deflection of Right Rear | Dynamic Tire Load of Left Front | Dynamic Tire Load of Right Rear | |
|---|---|---|---|---|---|---|---|
| Decrease percentage | 20.18% | 10.34% | 14.36% | 2.3% | 1.2% | 0.13% | 1.2% |
| Decrease Percentage | Droop Acceleration | Roll-Angle Acceleration | Pitch-Angle Acceleration | Dynamic Deflection of Left Front | Dynamic Deflection of Right Rear | Dynamic Tire Load of Left Front | Dynamic Tire Load of Right Rear |
|---|---|---|---|---|---|---|---|
| Compared with PID | 1.2% | 2.4% | 10.12% | 3.22% | 2.75% | 0.56% | 0.92% |
| Compared with Passive | 3.79% | 4.45% | 22.27% | 5.62% | 6.62% | 1.85% | 2.86% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, C.; Lv, K.; Xu, Q.; Dai, Y. Research on the Multimode Switching Control of Intelligent Suspension Based on Binocular Distance Recognition. World Electr. Veh. J. 2023, 14, 340. https://doi.org/10.3390/wevj14120340
Huang C, Lv K, Xu Q, Dai Y. Research on the Multimode Switching Control of Intelligent Suspension Based on Binocular Distance Recognition. World Electric Vehicle Journal. 2023; 14(12):340. https://doi.org/10.3390/wevj14120340
Chicago/Turabian StyleHuang, Chen, Kunyan Lv, Qing Xu, and Yifan Dai. 2023. "Research on the Multimode Switching Control of Intelligent Suspension Based on Binocular Distance Recognition" World Electric Vehicle Journal 14, no. 12: 340. https://doi.org/10.3390/wevj14120340
APA StyleHuang, C., Lv, K., Xu, Q., & Dai, Y. (2023). Research on the Multimode Switching Control of Intelligent Suspension Based on Binocular Distance Recognition. World Electric Vehicle Journal, 14(12), 340. https://doi.org/10.3390/wevj14120340