
Smart Tool Development for Customized Charging Services to EV Users


 ,
,
Abstract
:1. Introduction
2. Methodology
3. Development of TwinEV Module
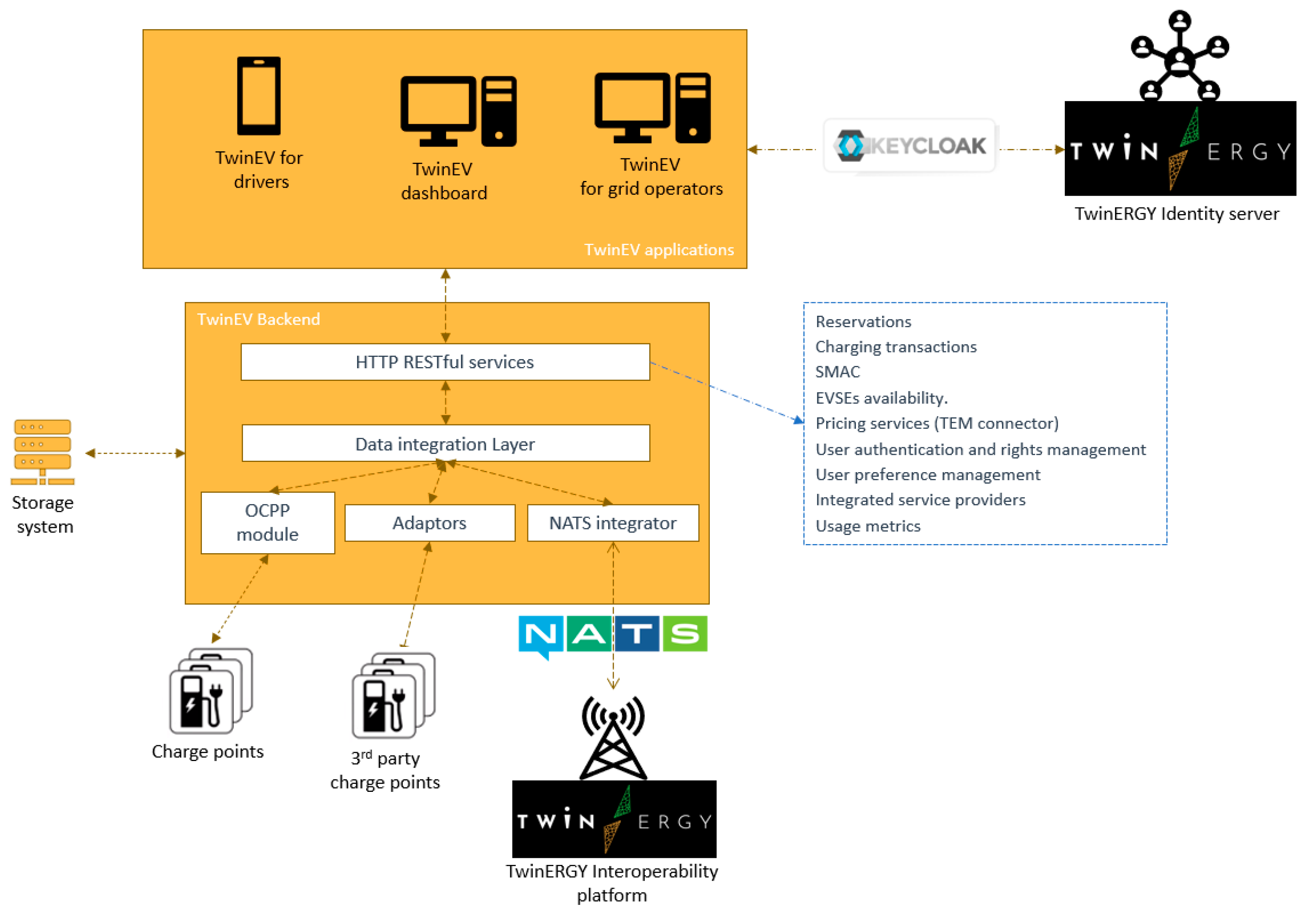
3.1. Architecture
- Backend and Adaptors: each of the applications constituting the tool correspond to back-end services, which are related to the application for individual EV drivers and offer a specialized interface, running continuously in the hosting platform. Backend is implemented as a huge set of RESTful services [20] supporting their clients with the required functionality, such as: Reservation of charge points, Management of the start and the end of transactions, SCT algorithm tool for calculating the profiles of charge for e-vehicles, and Pricing Services Management and publication of the availability of charge stations. In addition to services related to EVs, auxiliary services are included to this layer, such as: User authentication and rights management, User preference management, Data of the users as customers of the integrated service providers (contracts, terms and condition of usage, preferences), and Usage metrics, in an anonymized and aggregated way. The communication with other modules is done through the TwinERGY interoperability platform. This platform consists of a NATS (NATS: https://nats.io/, accessed on 12 May 2022) infrastructure, a messaging system where clients send and receive messages following a schema of publication and subscription: each message is published with a subject so only subscribers to that subject receive the message.
- The Adaptors are part of the TwinEV Backend, acting as the interpreter between the TwinEV and the Charging point communications. Adaptors are a set of micro-services, each one specialized in the interaction of the services and/or urban infrastructure equipment offered by third-party entities or external systems. They deal with the specificities of the 3rd party services, infrastructures, and data sources, and allow services, offering their functionality in a transparent manner. The Open Charge Point Protocol (OCPP)(Open Charge Alliance. Importance of Open Charge Point Protocol for the Electric Vehicle Industry. Available online: https://openchargealliance.org/, accessed on 12 July 2022) module acts as an adaptor, identifying the charging points based on the OCPP protocol (OCPP Protocol: https://www.elaad.nl/, accessed on 10 May 2022) that the charging point supports, and it translates the charger orders to the respective version in order to assess data in an integrated way. In particular, the OCPP module defines the communication between the charge point management platform and the e-charging devices. This protocol aims at allowing communications between charge stations and network to provide grid services cost-effectively. Moreover, it encourages customers to own EVs enabling uniform access to this infrastructure, roaming, and billing services. That means that it is the application protocol for communication between the Electric Vehicle Charging Stations (EVSEs) and the central management system (also called charging station network).
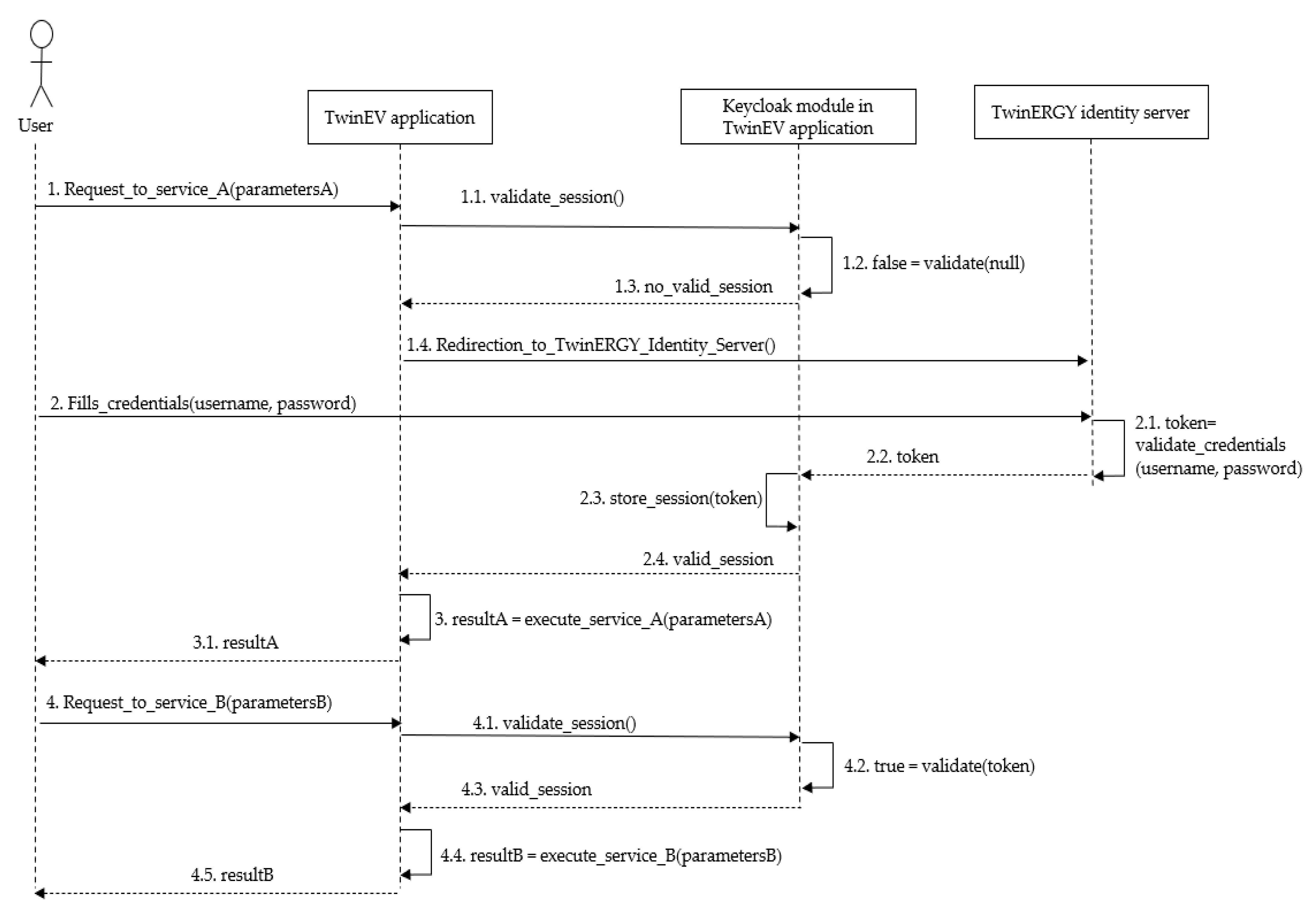
- Applications: a set of tools offering an interface for end-users and grid operators. Three applications are included in this layer: (a) a mobile application for EV drivers, supporting end-users with different services (e.g., book a charge point, reserve a shared vehicle, etc.), (b) TwinEV dashboard, a web application oriented towards the management of charge points, and (c) TwinEV web application for grid operators, where they can restrict the charge points’ supply in case of grid congestions. These three applications include the communication to the TwinERGY identity server through Keycloak, which allows a unified server to manage users and sessions in all applications. Keycloak is a manager of access control based on Single Sign-On (SSO) for web apps and RESTful web services [21].
3.2. Data Interchange
3.3. Smart Charging Tool (SCT)
- Optimum charging profiles considering CPO (Charging Point Operator) and driver requirements: maximize self-consumption to minimize the cost of the energy supplied by the grid. This profile models a basic context where CPs supply energy to vehicles with an upper limit in the energy injected. Here, the smart optimization consists of a minimization of the total cost for the energy supplied to the vehicle during each slot of time:where energyImportedCost is a variable calculated as:
- 2.
- V2G schemes: use of charging stations for Vehicle to Grid (V2G) energy flow, where it is possible. This profile adds to the previous one the case where vehicles and charge pots allow V2G scheme, that is, the return of energy from EV battery to the energy network. The optimization for this model is the same one, the minimization of the total cost of the operation: With respect to the previous scheme, EVSE nominal discharge power (kW) (EVSEDischargePowern) is set to 0 for those EVSEs with no V2G capabilities:
- 3.
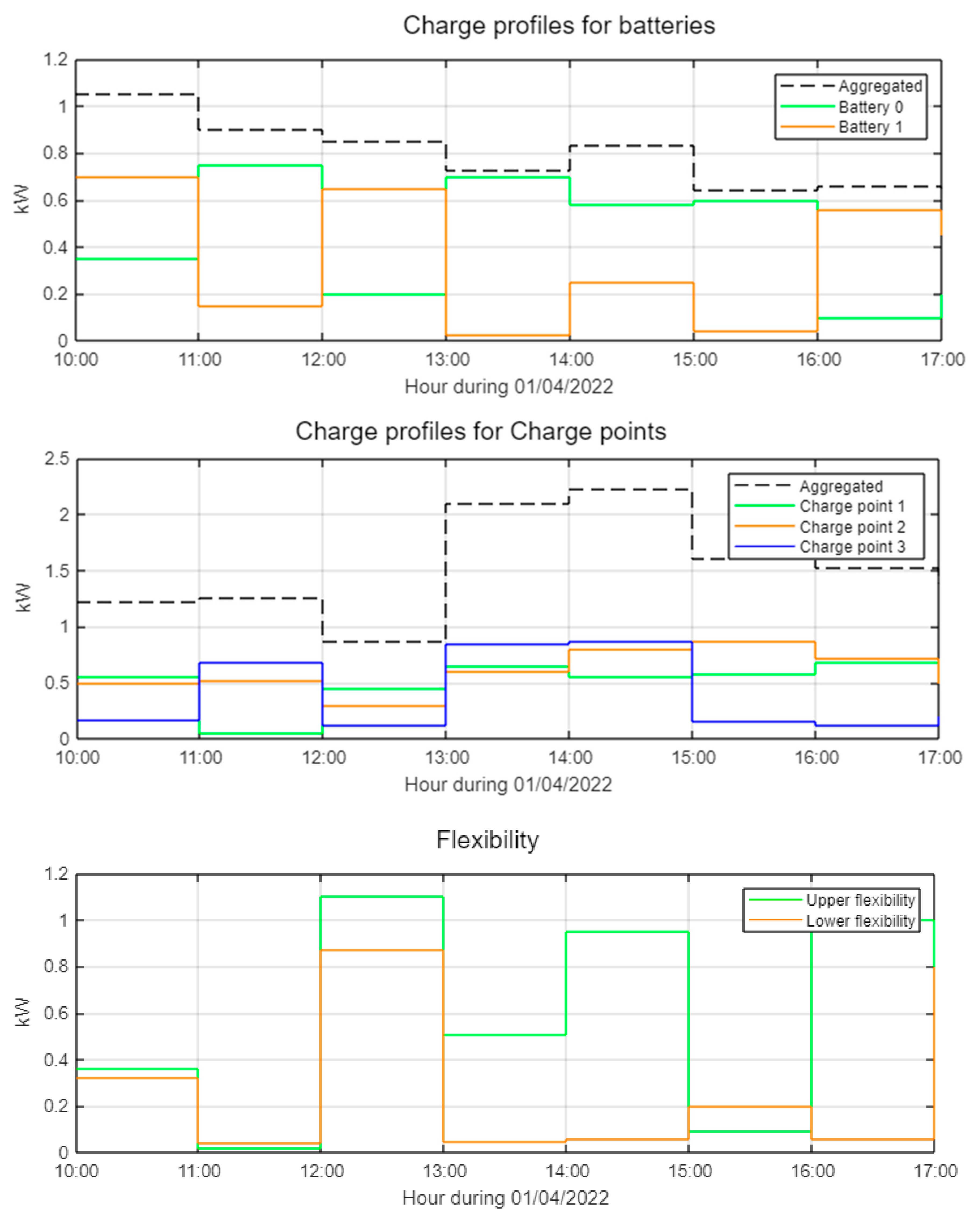
- Support to the grid: this scenario incorporates modifications on the charging point power flow, to adjust it to meet the “flexibility orders” given by the Distributed System Operator (DSO). This version of the model incorporates the possibility of integrating support operations to the grid. These support operations consist of modifications on the supply point power flow limit (either upper, allowing greater demand, or lower, imposing demand limitations) provided by the grid operator (so-called flexibility orders).
- 4.
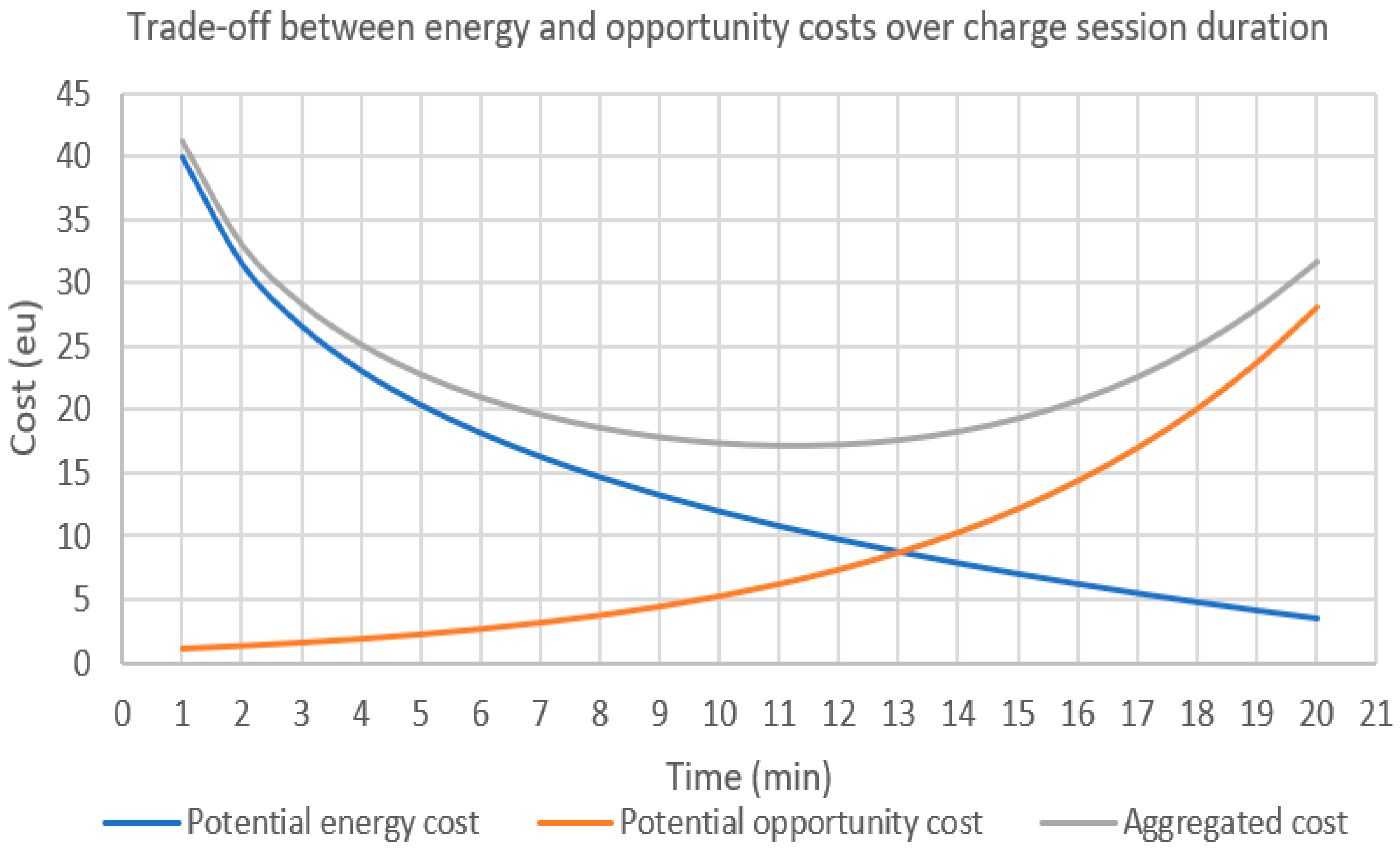
- Trade-off between smart charge benefits and long-lasting charging sessions: in this model, “opportunity costs” are included, so the Charging Point Operator (CPO) faces an opportunity cost for every new charge session that cannot be supplied due to the lack of free charging points. This cost increases along with the duration of the active sessions [22].
- Number of slots an EVSE has been occupied prior to the execution of the optimization (time the charge session has taken place so far, measured in slots) (PreviousSlotsn)
- Opportunity cost faced per duration of the charge session (linear cost) (OpportunityCost) (€/slot)
4. Web Applications
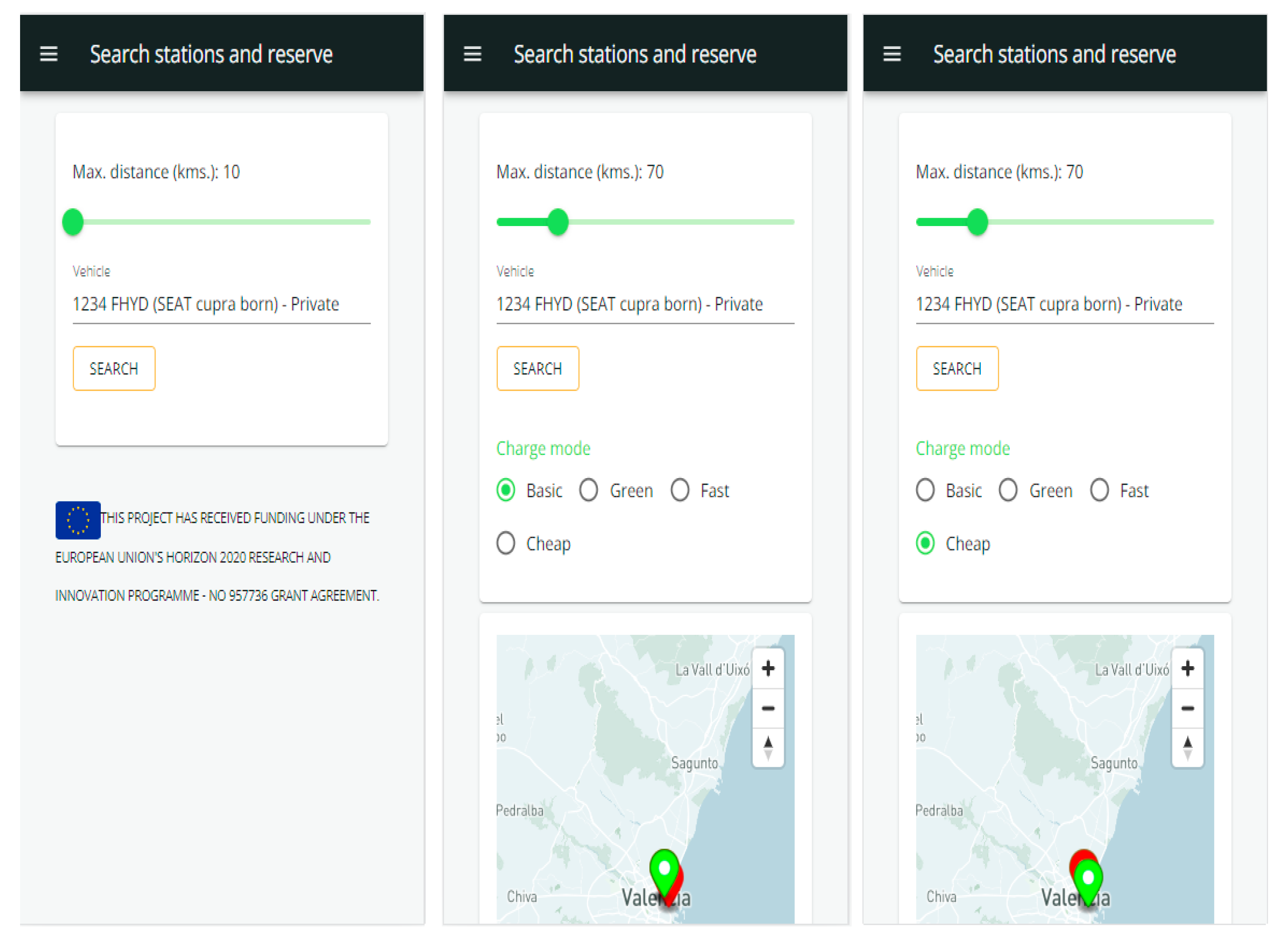
4.1. TwinEV for Drivers
4.2. TwinEV for Grid Operators
4.3. TwinEV Dashboard
5. Deployment and Testing
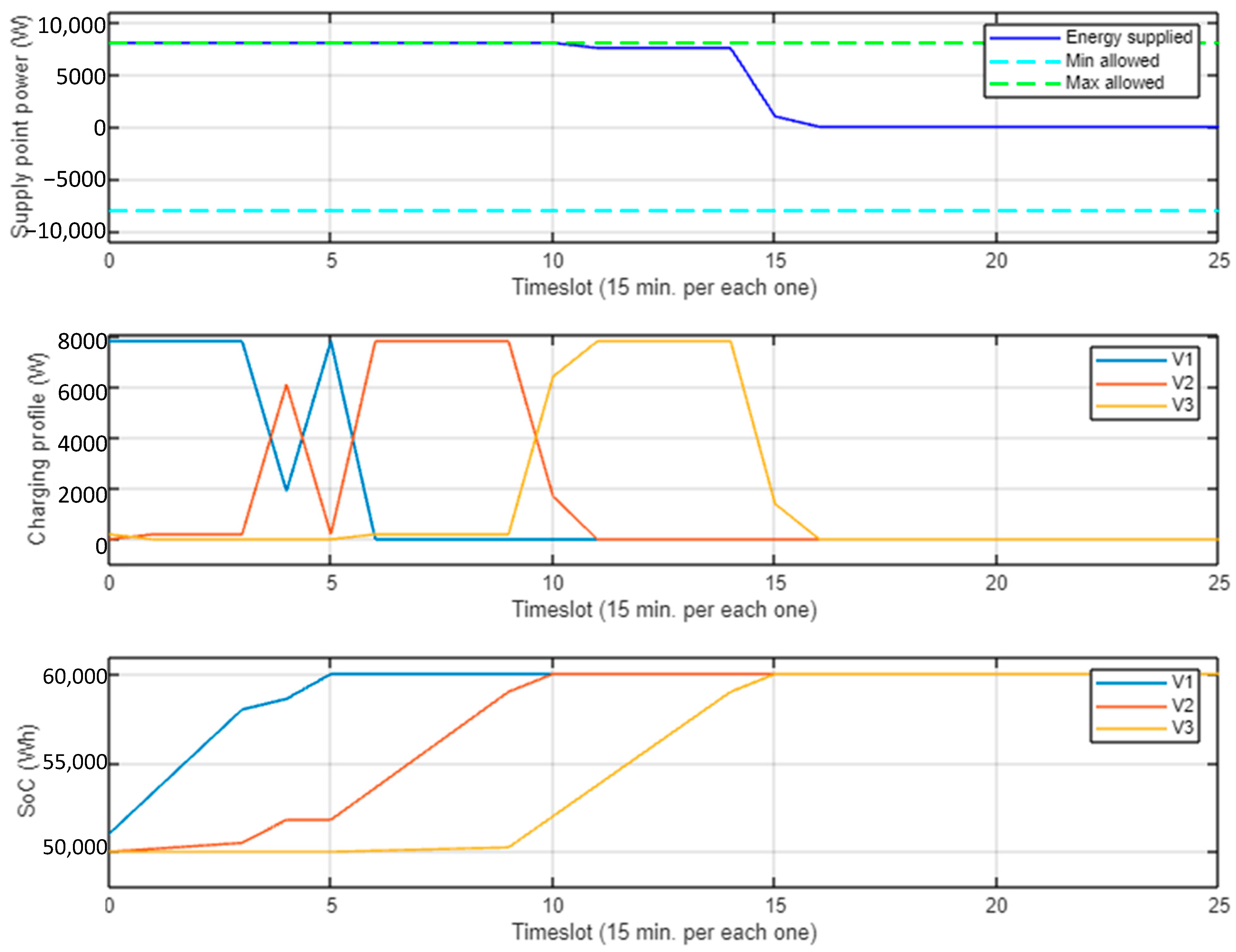
- Power [W]. In “Power” diagram we exclude the power provided by the EVs, thus power from other generators is considered equal to zero for all three scenarios. The demand forecast for all three cases is equal to zero, thus no forecasted demand for the cases is represented.
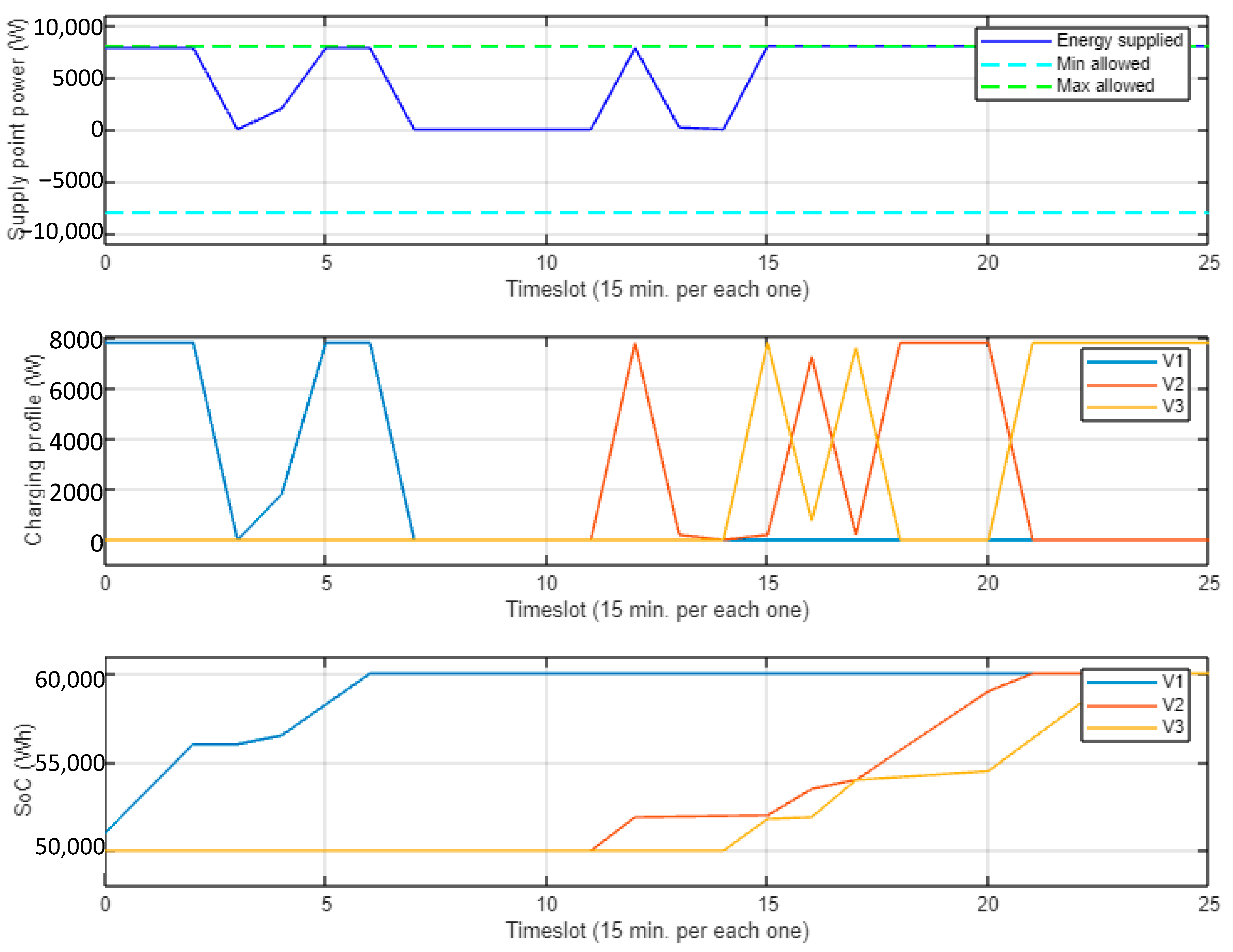
- Supply Point Power [W]. This diagram is the accumulative diagram for all three charging profiles, and it represents the power provided by a hypothetical charging point that could provide power to the three EVs, with a limitation of 10 kW.
- Charging profiles [W]. This diagram represents the fluctuation of the power supplied to each vehicle in the given period.
- State of Charge–SoC [Wh]. This graph represents the evolution of the energy stored in each EV.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- A European Strategy for Low-Emission Mobility. Available online: https://ec.europa.eu/commission/presscorner/detail/nl/MEMO_16_2497 (accessed on 10 May 2022).
- Proposal for a Regulation of the European Parliament and the Council on the Approval and Market Surveillance of Motor Vehicles and Their Trailers, and of Systems, Components and Separate Technical Units Intended for Such Vehicles. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=SWD%3A2016%3A0009%3AFIN (accessed on 10 June 2022).
- Zhang, R.; Fujimori, S. The role of transport electrification in global climate change mitigation scenarios. Environ. Res. Lett. 2020, 13, 034019. [Google Scholar] [CrossRef]
- Sanguesa, J.A.; Torres-Sanz, V.; Garrido, P.; Martinez, F.; Marquez-Barja, J.M. A Review on Electric Vehicles: Technologies and Challenges. Environ. Smart Cities 2021, 4, 22. [Google Scholar] [CrossRef]
- Electric Vehicle Integration into Power Grids, ENTSO-E Position Paper. Available online: https://www.entsoe.eu/2021/04/02/electric-vehicle-integration-into-power-grids/ (accessed on 20 May 2022).
- Wang, Q.; Liu, X.; Du, J.; Kong, F. Smart Charging for Electric Vehicles: A Survey from the Algorithmic Perspective. IEEE Commun. Surv. Tutor. 2016, 18, 1500–1517. [Google Scholar] [CrossRef] [Green Version]
- Ferreira, J.C.; Monteiro, V.; Afonso, J.L.; Silva, A. Smart electric vehicle charging system. In Proceedings of the 2011 IEEE Intelligent Vehicles Symposium (IV), Baden-Baden, Germany, 5 July 2011. [Google Scholar]
- Chris, A.; Lundén, J.; Koivunen, V. Reinforcement learning-based plug-in electric vehicle charging with forecasted price. IEEE Trans. Veh. Technol. 2017, 66, 3674–3684. [Google Scholar]
- Xi, X.; Sioshansi, R. Using price-based signals to control plug-in electric vehicle fleet charging. IEEE Trans. Smart Grid. 2014, 5, 1451–1464. [Google Scholar] [CrossRef]
- Wang, S.; Bi, S.; Zhang, Y.-J.A.; Huang, J. Electrical vehicle charging station profit maximization: Admission, pricing, and online scheduling. IEEE Trans. Sustain. Energy 2017, 9, 1722–1731. [Google Scholar] [CrossRef] [Green Version]
- Xia, M.; Lai, Q.; Zhong, Y.; Li, C.; Chiang, H.D. Aggregator-based interactive charging management system for electric vehicle charging. Energies 2016, 9, 159. [Google Scholar] [CrossRef] [Green Version]
- Clairand, J.M.; Rodriguez-Garcia, J.; Alvarez-Bel, C. Smart Charging for Electric Vehicle Aggregators Considering Users’ Preferences. IEEE Access. 2018, 6, 54624–54635. [Google Scholar] [CrossRef]
- Rivera, J.; Goebel, C.; Jacobsen, H.-A. Distributed convex optimization for electric vehicle aggregators. IEEE Trans. Smart Grid 2017, 8, 1852–1863. [Google Scholar] [CrossRef]
- Wenzel, G.; Negrete-Pincetic, M.; Olivares, D.E.; MacDonald, J.; Callaway, D.S. Real-time charging strategies for an electric vehicle aggregator to provide ancillary services. IEEE Trans. Smart Grid 2018, 9, 5141–5151. [Google Scholar] [CrossRef] [Green Version]
- Dahmane, Y.; Ghanes, M.; Chenouard, R.; Alvarado-Ruiz, M. Decentralized control of electric vehicle smart charging for cost minimization considering temperature and battery health. In Proceedings of the 2019 IEEE International Conference on Communications, Control, and Computing Technologies for Smart Grids (SmartGridComm), Beijing, China, 21–23 October 2019. [Google Scholar]
- Pevec, D.; Kayzer, M.; Babic, J.; Carvalho, A.; Ghiassi-Farrokhfal, Y.; Podobnik, V. A Computational Framework for Managing Electric Vehicle Charging Infrastructure. In Proceedings of the 9th International Exergy, Energy and Environment Symposium, Split, Croatia, 14–17 May 2017. [Google Scholar]
- Chang, W.Y. The State of Charge Estimating Methods for Battery: A Review. Int. Sch. Res. Not. 2013, 2013, 953792. [Google Scholar] [CrossRef]
- Kumar, K.N.; Cheah, P.H.; Sivaneasan, B.; So, P.L.; Wang, D.Z.W. Electric vehicle charging profile prediction for efficient energy management in buildings. In Proceedings of the 2012 10th International Power & Energy Conference (IPEC), Ho Chi Minh City, Vietnam, 12–14 December 2012. [Google Scholar]
- Maase, S.; Dilrosun, X.; Kooi, M.; Hoed, R. Performance of Electric Vehicle Charging Infrastructure: Development of an Assessment Platform Based on Charging Data. World Electr. Veh. J. 2018, 9, 25. [Google Scholar] [CrossRef] [Green Version]
- Neumann, A.; Laranjeiro, N.; Bernardino, J. An Analysis of Public REST Web Service APIs. IEEE Trans. Serv. Comput. 2021, 14, 957–970. [Google Scholar] [CrossRef]
- Keycloak. Server Administration Guide. Available online: https://www.keycloak.org/docs/latest/server_admin (accessed on 14 May 2022).
- eMaaS Project. Public Summary Report. Available online: https://www.emaas.eu/wp-content/uploads/eMaaS_Final_Public_Summary_Report_2020.pdf (accessed on 8 June 2022).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Inputs | Description | Domain |
|---|---|---|
| Demandt | Non-controllable on-site demand power forecast (kW) | t ∈ [0,T − 1] |
| Productiont | On-site production (generation) power forecast (kW) | t ∈ [0,T − 1] |
| SupplyPointPMax | Limitation of total (imported) power at on-site supply point (kW) | - |
| SupplyPointPmin | Minimal (imported) power at on-site supply point (kW) | - |
| Pricet | Imported energy price (€/kWh) | t ∈ [0,T − 1] |
| EVSECapacityn | Total battery capacity (kWh) per EV | n ∈ [0,N − 1] |
| EVSESoCn | Battery initial SoC (kWh) per EV | n ∈ [0,N − 1] |
| EVSEPowern | EVSE nominal power (kW) | n ∈ [0,N − 1] |
| SupplyPointEnergyIsImportingt | Energy (kWh) that it is being imported at the end of each slot | t ∈ [0,T − 1] |
| SupplyPointEnergyIsExportingt | Energy (kWh) that it is being exported at the end of each slot | t ∈ [0,T − 1] |
| EVSEDischargePowern | EVSE discharge power (kW) | n ∈ [0,N − 1] |
| PreviousSlotsn | Number of slots an EVSE has been occupied prior to the execution of optimization | n ∈ [0,N − 1] |
| OpportunityCosts | Opportunity Cost faced per duration of the charge session (€/slot) | - |
| TargetSlotn | Target slot per EV (time when EV is required to be charged) | n ∈ [0,N − 1] |
| TargetSoCn | Target SoC (ratio of total battery capacity) required at target slot per EV | n ∈ [0,N − 1] |
| Flexibilityt | On-site flexibility power forecast (kW) | t ∈ [0,T − 1] |
| Variable | Description | Domain |
|---|---|---|
| SupplyPointEnergyImportedt | Energy (kWh) that it is flowing at the end of each slot | t ∈ [0,T − 1] |
| energyImportedCostt | Cost of the energy imported by the EVSE | t ∈ [0,T − 1] |
| SupplyPointEnergyIsImportedt | Energy (kWh) that it is being imported at the end of each slot | t ∈ [0,T − 1] |
| SupplyPointIsEnergyExportedt | Energy (kWh) that it is being exported at the end of each slot | t ∈ [0,T − 1] |
| EVSEEnergyn,t | Energy (kWh) to be delivered per EVSE and slot | n ∈ [0,N − 1] t ∈ [0,T − 1] |
| EVSESoCn,t | Electric Vehicle State of Charge (kWh) at the end of each slot | n ∈ [0,N − 1] t ∈ [0,T − 1] |
| TargetSoCReachedn,t | Electric Vehicle State of Charge (kWh) at the end of the charging session | n ∈ [0,N − 1] t ∈ [0,T − 1] |
| TargetSoCNotReachedn,t | Electric Vehicle State of Charge (kWh) at the end of the charging session | n ∈ [0,N − 1] t ∈ [0,T − 1] |
| Information | Description |
|---|---|
| Module under test | The module to be tested |
| Elements validated | The requirement, use case, or certification rule, which is validated by the test case. |
| Features to be tested | List of features to be tested |
| Preconditions (optional) | List of conditions needed for the test execution |
| Previous steps (optional) | Shortlist of steps needed for preparing the test environment for test execution |
| Dependencies (optional) | List of test case codes defining test cases which need to be passed before the test case at hand can be started |
| Steps | Testing procedures |
| Postconditions | Status after the execution of the test |
| Acceptance criteria | Expected (measurable) results, allowing to unambiguously judge if the test is passed or not passed (i.e., the product requirement was validated or not validated) |
| Suspension criteria (Optional) | Conditions under which continuation of the test is considered pointless because testing results would be invalid |
| Identifier | Name | Module |
|---|---|---|
| TWINEV_DRVR_1 | Searching of charge points in an area | TwinEV for drivers |
| TWINEV_ DRVR_2 | Reservation of a public charge point | TwinEV for drivers |
| TWINEV_ DRVR_3_1 | Start a charge session of a reserved charge point (grid requests) | TwinEV for drivers |
| TWINEV_ DRVR_3_2 | Start a charge session of a reserved charge point (RES integration) | TwinEV for drivers |
| TWINEV_ DRVR_3_3 | Start a charge session of a reserved charge point (RES integration-v2g) | TwinEV for drivers |
| TWINEV_ DRVR_3_4 | Start a charge session of a reserved charge point (minimal charge costs) | TwinEV for drivers |
| TWINEV_ DRVR_3_5 | Start a charge session of a reserved charge point (charge time) | TwinEV for drivers |
| TWINEV_ DRVR_4 | Start a charge session of a private charge point | TwinEV for drivers |
| TWINEV_ DRVR_5 | Manual stop of a charge session | TwinEV for drivers |
| TWINEV_ DRVR_6 | Automatic stop of a charge session | TwinEV for drivers |
| TWINEV_GRD_1 | Add a new restriction | TwinEV for grid operators |
| TWINEV_GRD_2 | Check a restriction effect | TwinEV for grid operators |
| TWINEV_DSHB_1 | Transactions | TwinEV dashboard |
| TWINEV_DSHB_2 | Commands | TwinEV dashboard |
| TWINEV_DSHB_3 | System statistics reflecting actions by drivers and grid operators | TwinEV dashboard |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Galbis, A.Z.; García, M.A.; García, A.I.M.; Karatzas, S.; Chassiakos, A.; Lazari, V.; Ageli, O. Smart Tool Development for Customized Charging Services to EV Users. World Electr. Veh. J. 2022, 13, 145. https://doi.org/10.3390/wevj13080145
Galbis AZ, García MA, García AIM, Karatzas S, Chassiakos A, Lazari V, Ageli O. Smart Tool Development for Customized Charging Services to EV Users. World Electric Vehicle Journal. 2022; 13(8):145. https://doi.org/10.3390/wevj13080145
Chicago/Turabian StyleGalbis, Alberto Zambrano, Moisés Antón García, Ana Isabel Martínez García, Stylianos Karatzas, Athanasios Chassiakos, Vasiliki Lazari, and Olympia Ageli. 2022. "Smart Tool Development for Customized Charging Services to EV Users" World Electric Vehicle Journal 13, no. 8: 145. https://doi.org/10.3390/wevj13080145
APA StyleGalbis, A. Z., García, M. A., García, A. I. M., Karatzas, S., Chassiakos, A., Lazari, V., & Ageli, O. (2022). Smart Tool Development for Customized Charging Services to EV Users. World Electric Vehicle Journal, 13(8), 145. https://doi.org/10.3390/wevj13080145