
Nonlinear Influence Model of Built Environment of Residential Area on Electric Vehicle Miles Traveled


Abstract
:1. Introduction
2. Data Source
2.1. Data Description
2.2. Variable Index Selection
3. Construction of Nonlinear eVMT Influence Model Gradient Boosting Decision Tree (GBDT)
3.1. Model Selection
3.2. Mathematical Model
3.3. Interpretability of the Model
3.3.1. Characteristic Importance
3.3.2. Partial Function Dependence
4. Empirical Analysis and Discussion
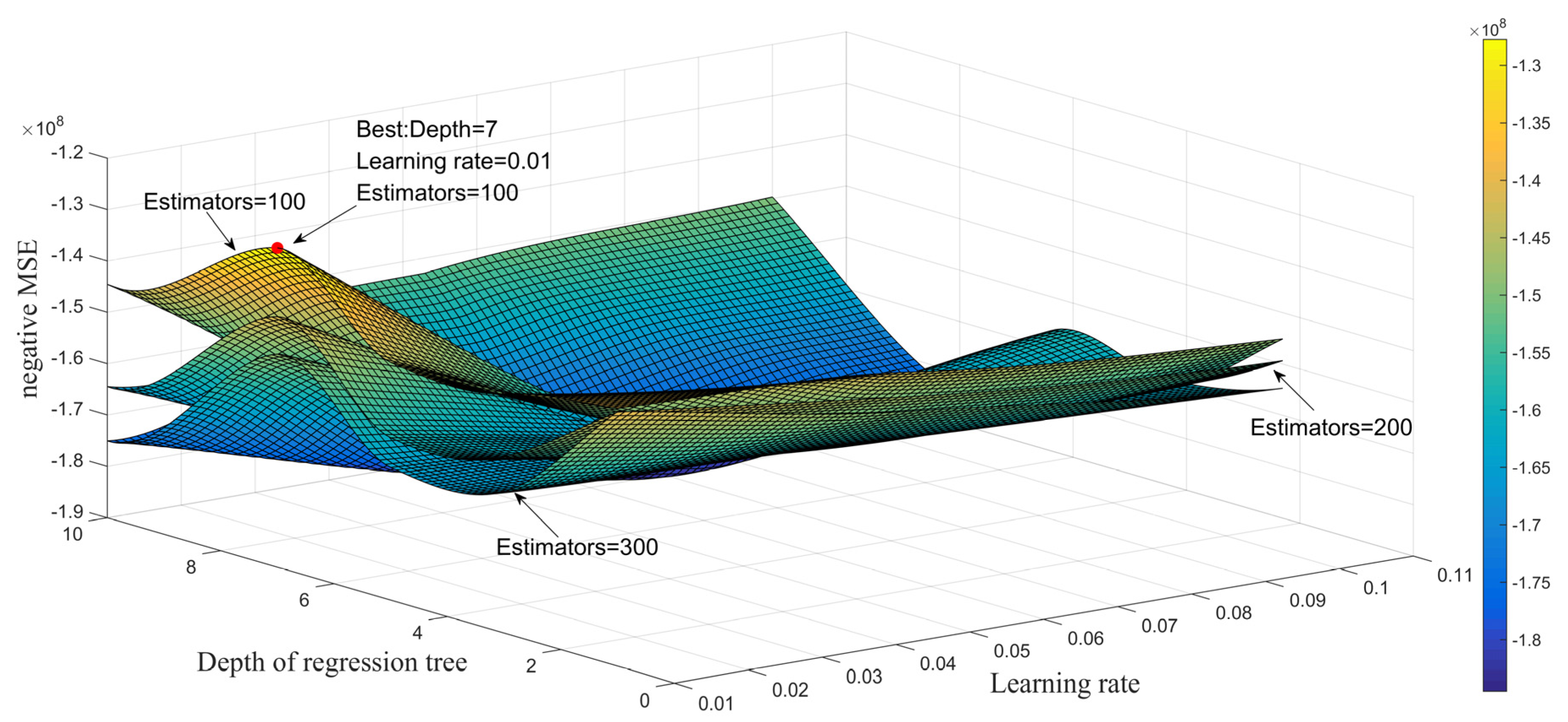
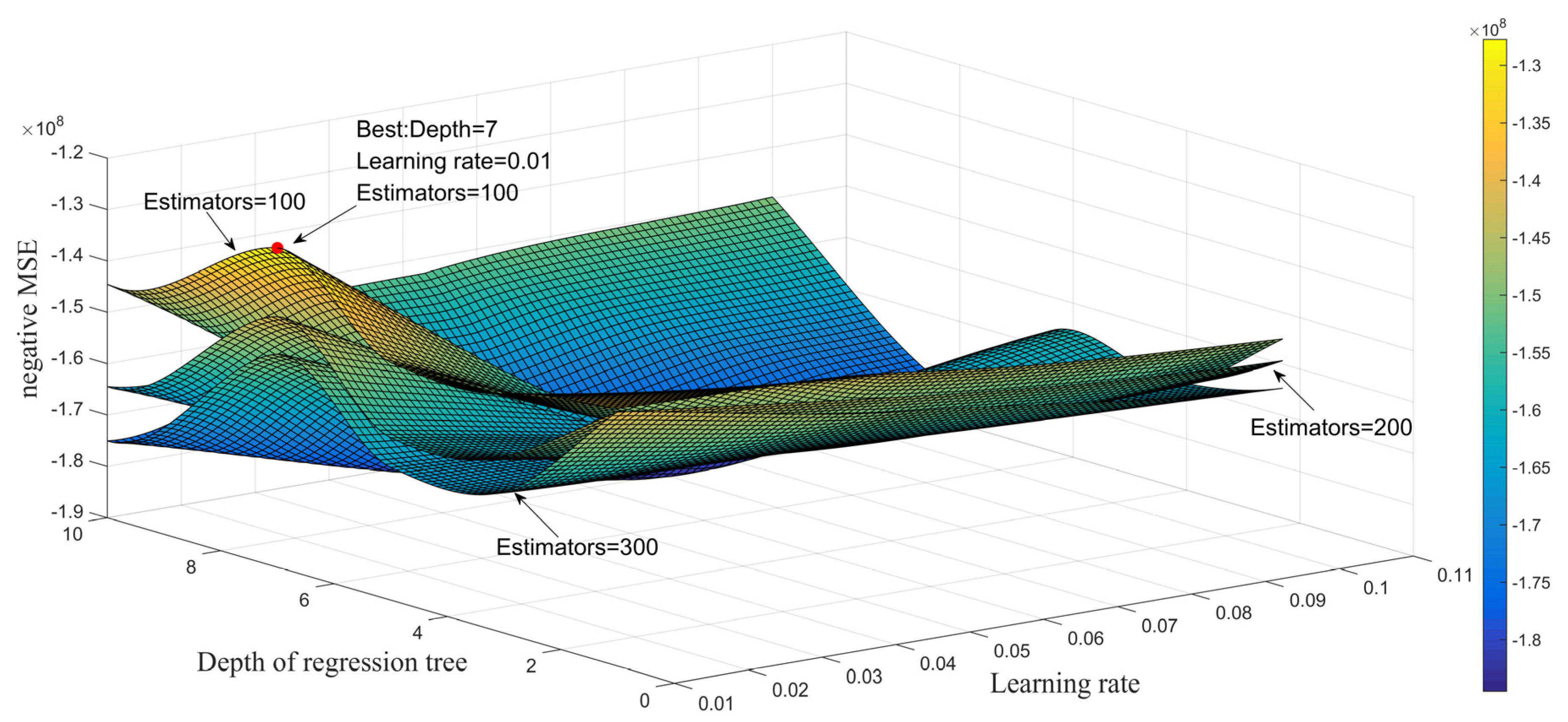
4.1. Determination of Model Hyperparameters
4.2. Overall Effect Analysis and Discussion
4.3. Marginal Effect Analysis and Discussion
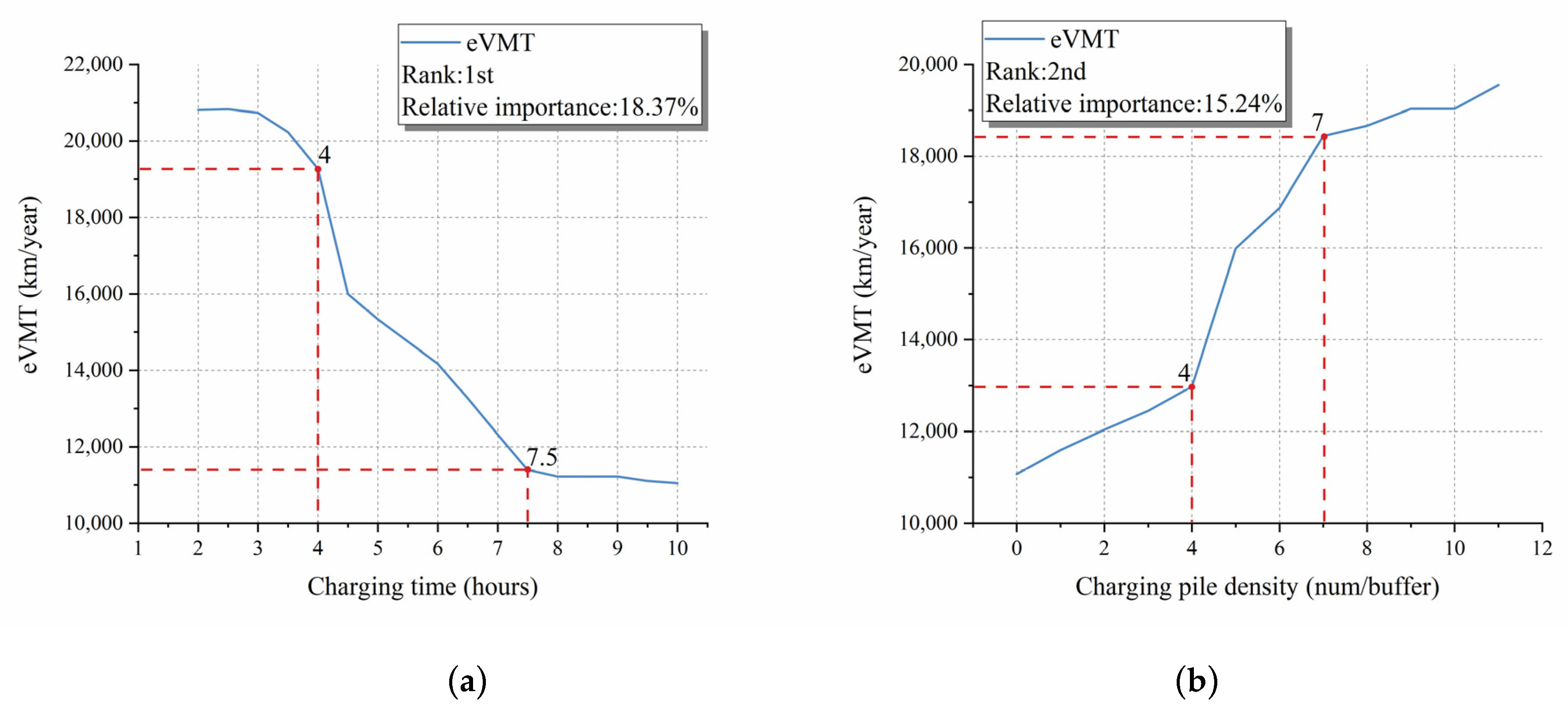
4.3.1. Charging Characteristics of EVs
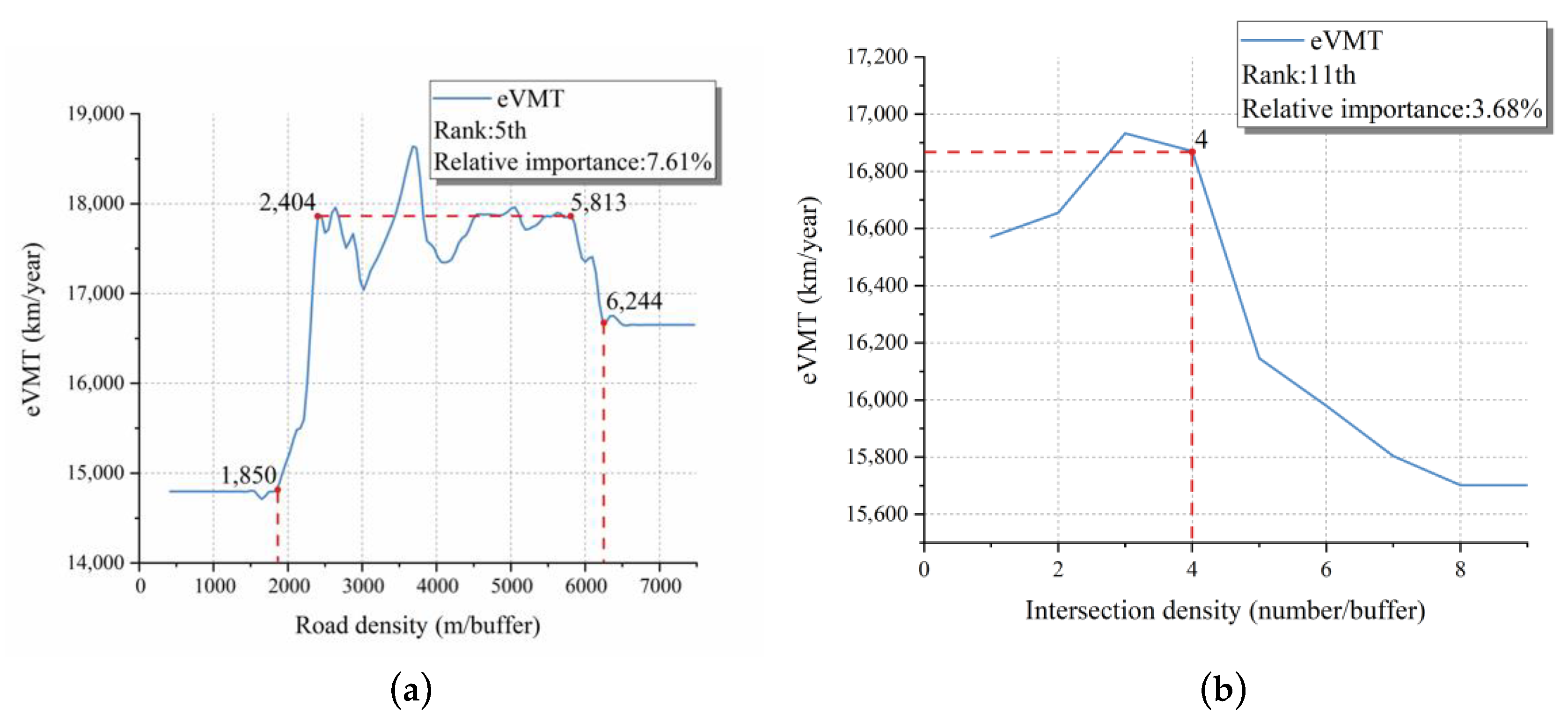
4.3.2. Traffic Design
4.3.3. Distance to the Nearest Business District and Population Density
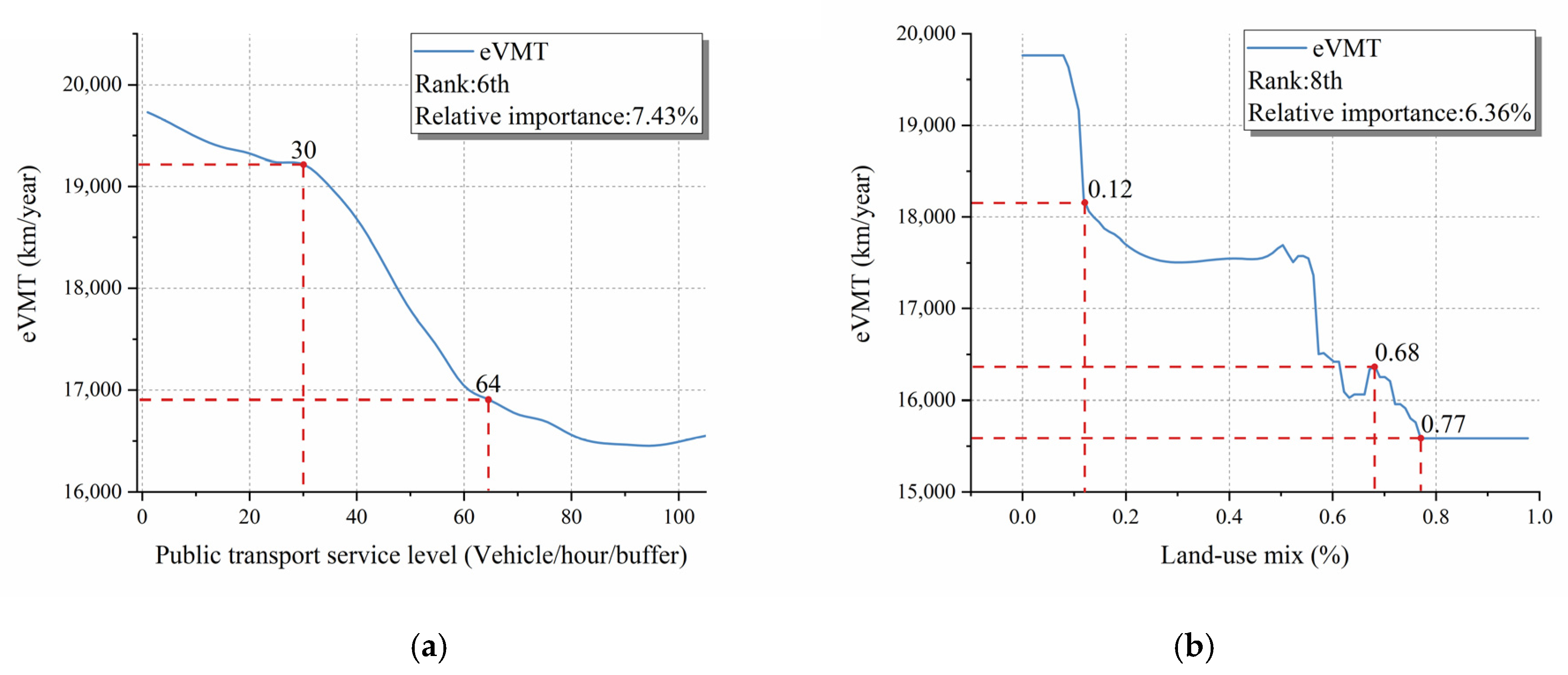
4.3.4. Public Transport Service Level and Diversity
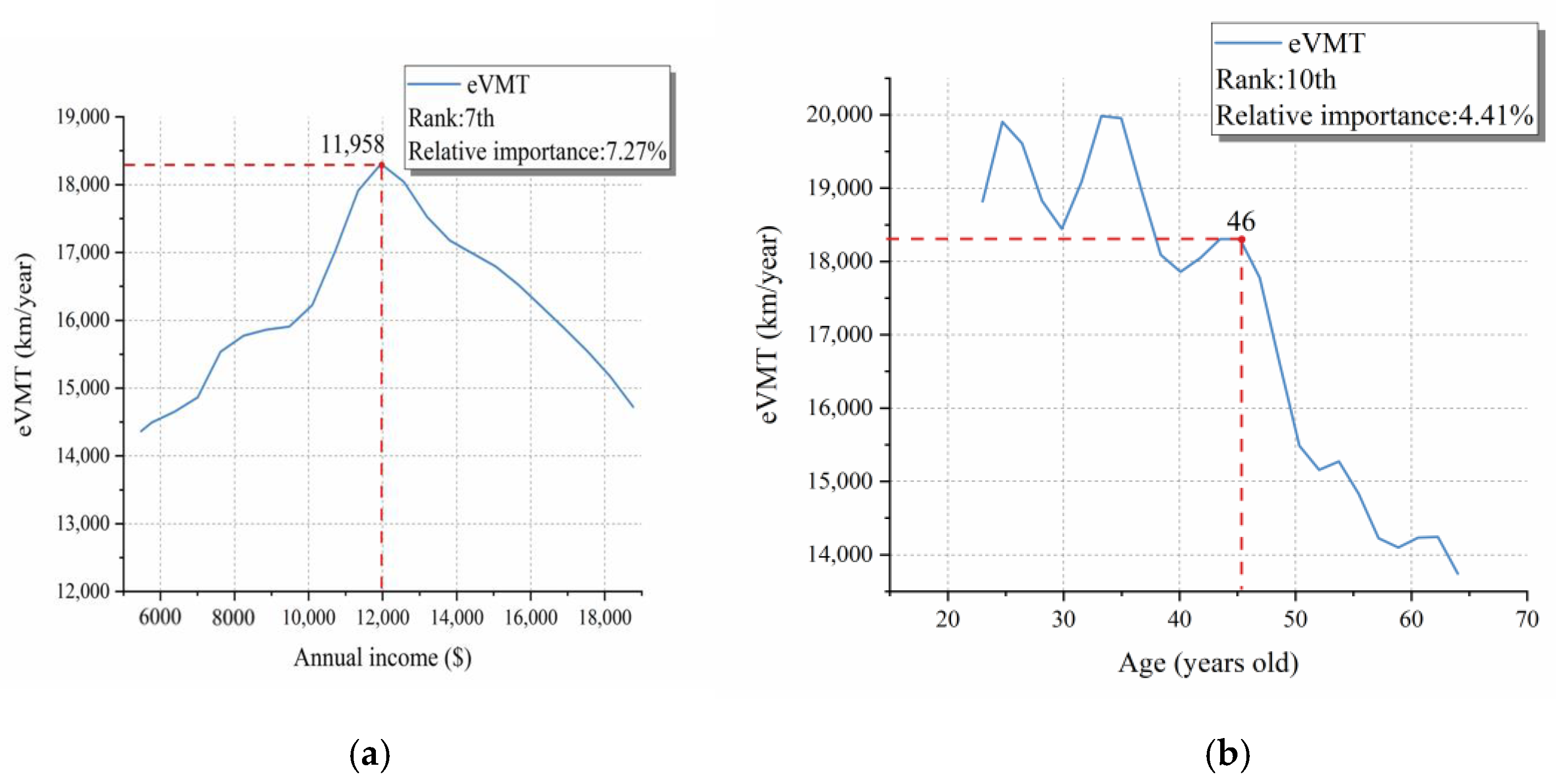
4.3.5. Demographic Variables
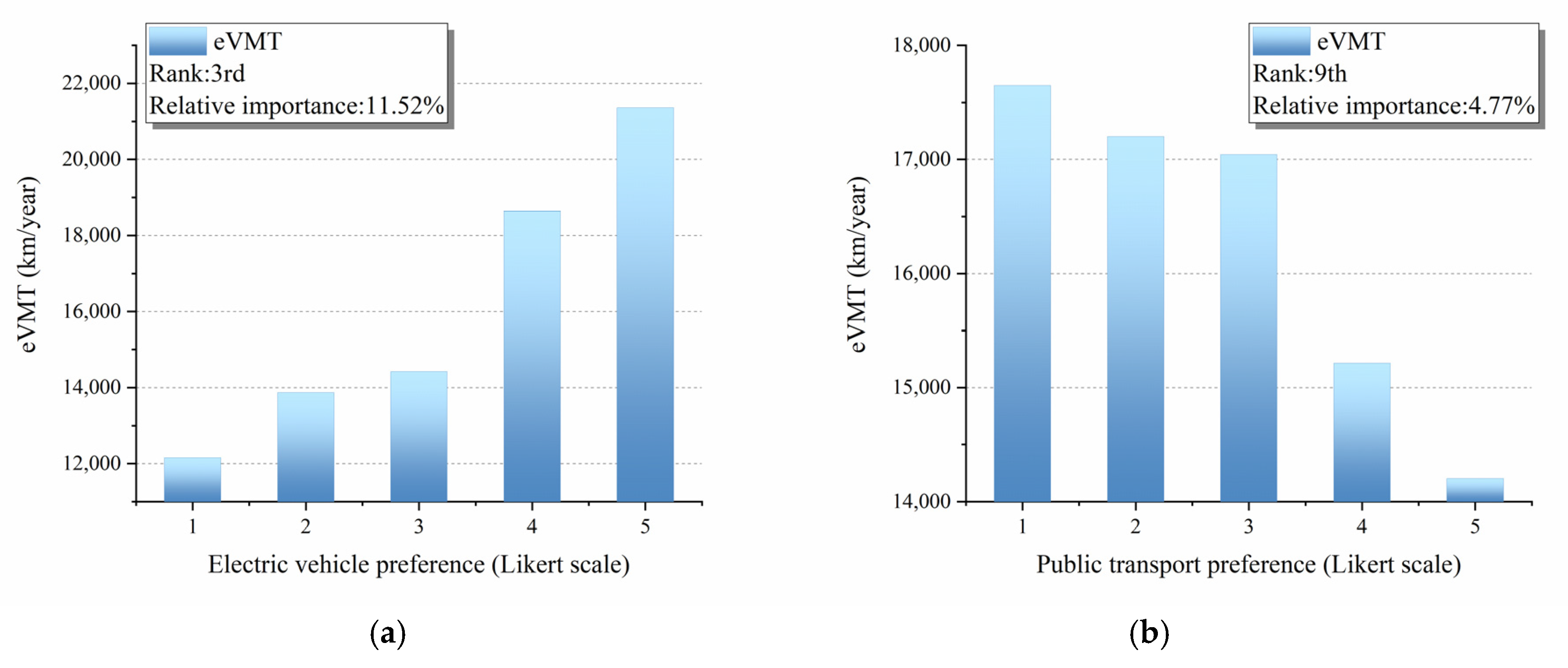
4.3.6. EV Preference and Public Transport Preference
5. Conclusions
- Scientifically planning the number of charging piles in a residential area (maintain at least four within 500 m of the residential area charging piles).
- Accelerating the research and development of fast-charging EVs (ensure that the average charging time of EVs is within 7.5 h; within 4 h is the best).
- Areas with a high road density (over 2404 m/buffer), high intersection density (over 4 num/buffer), and residential areas far away from business districts or areas with a population density of approximately 15,000 person/km2 should invest more EVs promotion costs.
- Carry out more sales promotion for those with an annual income of about USD 11,958 and the young and middle-aged population.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Acciaro, M.; Ghiara, H.; Cusano, M.I. Energy management in seaports: A new role for port authorities. Energy Policy 2014, 71, 4–12. [Google Scholar] [CrossRef]
- Jacobson, M.Z. Review of solutions to global warming, air pollution, and energy security. Energy Environ. Sci. 2009, 2, 148–173. [Google Scholar] [CrossRef]
- Amelung, D.; Helen, F.; Alina, H.; Carlo, A.; Louis, V.R.; Heiko, B.; Wilkinson, P.; Sauerborn, R. Human health as a motivator for climate change mitigation: Results from four European high-income countries. Glob. Environ. Chang. 2019, 57, 101918. [Google Scholar] [CrossRef]
- Darabi, Z.; Ferdowsi, M. Impact of plug-in hybrid electric vehicles on electricity demand profile. IEEE Trans. Sustain. Energy 2011, 2, 501–508. [Google Scholar] [CrossRef]
- Nian, V.; Hari, M.P.; Yuan, J. A new business model for encouraging the adoption of electric vehicles in the absence of policy support. Appl. Energy 2019, 235, 1106–1117. [Google Scholar] [CrossRef]
- Ewing, R.; Cervero, R. Travel and the built environment. J. Am. Plan. Assoc. 2010, 76, 265–294. [Google Scholar] [CrossRef]
- Cervero, R.; Kara, K. Travel demand and the 3ds: Density, diversity, and design. Transp. Res. D 1997, 2, 199–219. [Google Scholar] [CrossRef]
- Ewing, R.; Cervero, R. Travel and the built environment: A synthesis. Transp. Res. Rec. 2001, 1780, 87–114. [Google Scholar] [CrossRef] [Green Version]
- Ewing, R.; Greenwald, M.J.; Zhang, M.; Walters, J.; Feldman, M.; Cervero, R.; Thomas, J. Measuring the Impact of Urban Form and Transit Access on Mixed Use Site Trip Generation Rates—Portland Pilot Study; US Environmental Protection Agency: Washington, DC, USA, 2009.
- Singh, A.C.; Astroza, S.; Garikapati, V.M.; Pendyala, R.M.; Bhat, C.R.; Mokhtarian, P.L. Quantifying the relative contribution of factors to household vehicle miles of travel. Transp. Res. D 2018, 63, 23–36. [Google Scholar] [CrossRef]
- Sardari, R.; Shima, H.; Raha, P. Effects of traffic congestion on vehicle miles traveled. Transp. Res. Rec. 2018, 2672, 92–102. [Google Scholar] [CrossRef]
- Macioszek, E. Electric Vehicles—Problems and Issues. Smart and Green Solutions for Transport Systems, Transport Systems. Theory and Practice 2019; Springer: Katowice, Poland, 2020. [Google Scholar]
- Macioszek, E. E-mobility Infrastructure in the Górnolsko—Zagbiowska Metropolis, Poland, and Potential for Development. In Proceedings of the 5th World Congress on New Technologies, Lisbon, Portugal, 18–20 August 2019. [Google Scholar]
- Gandoman, F.H.; Ahmed, E.M.; Ali, Z.M.; Berecibar, M.; Zobaa, A.F.; Shady, H.E.A.A. Reliability Evaluation of Lithium-Ion Batteries for E-Mobility Applications from Practical and Technical Perspectives: A Case Study. Sustainability 2021, 13, 11688. [Google Scholar] [CrossRef]
- Weiller, C. Plug-in hybrid electric vehicle impacts on hourly electricity demand in the United States. Energy Policy 2011, 39, 3766–3778. [Google Scholar] [CrossRef]
- Ling, Z.W.; Cherry, C.R.; Wen, Y. Determining the Factors That Influence Electric Vehicle Adoption: A Stated Preference Survey Study in Beijing, China. Sustainability 2021, 13, 11719. [Google Scholar] [CrossRef]
- Gardner, B.; Abraham, C. What drives car use? a grounded theory analysis of commuters’ reasons for driving. Transp. Res. F 2007, 10, 187–200. [Google Scholar] [CrossRef]
- Gardner, B.; Abraham, C. Psychological correlates of car use: A meta-analysis. Transp. Res. F 2008, 11, 300–311. [Google Scholar] [CrossRef]
- Jiang, Q.; Wei, W.; Xin, G.; Dexin, Y. What increases consumers’ purchase intention of battery electric vehicles from Chinese electric vehicle start-ups? taking Nio as an example. World Electr. Veh. J. 2021, 12, 71. [Google Scholar] [CrossRef]
- Ewing, G.O.; Emine, S. Car fuel-type choice under travel demand management and economic incentives. Transp. Res. D 1998, 3, 429–444. [Google Scholar] [CrossRef]
- Krishnan, V.V.; Koshy, B.I. Evaluating the factors influencing purchase intention of electric vehicles in households owning conventional vehicles. Case Stud. Transp. Policy 2021, 9, 1122–1129. [Google Scholar] [CrossRef]
- Mohamed, N.; Aymen, F.; Ali, Z.M.; Zobaa, A.F.; Shady, H.E.A.A. Efficient Power Management Strategy of Electric Vehicles Based Hybrid Renewable Energy. Sustainability 2021, 13, 7351. [Google Scholar] [CrossRef]
- Guan, H.Z.; Liu, R.Y.; Zeng, M.Y. Park-and-ride transfer behaviors under the circumstances of insufficient park-and-ride parking space. J. Beijing Univ. Technol. 2019, 45, 593–600. [Google Scholar]
- Meng, F.; Yuchuan, D.; Yuen, C.L.; Wong, S.C. Modeling heterogeneous parking choice behavior on university campuses. Transp. Plan. Technol. 2018, 41, 154–169. [Google Scholar] [CrossRef]
- Yiming, X.; Yan, X.; Liu, X.; Zhao, X. Identifying key factors associated with ride splitting adoption rate and modeling their nonlinear relationships. Transp. Res. A 2021, 144, 170–188. [Google Scholar]
- Cervero, R. Built environments and mode choice: Toward a normative framework. Transp. Res. D 2002, 7, 265–284. [Google Scholar] [CrossRef]
- Zhong, H.M.; Zhang, W.L.; Li, Y.R.; Zhu, Z.F.; Zhao, Y. GBDT based railway accident type prediction and cause analysis. Acta Autom. Sin. 2021, 47, 1–9. [Google Scholar]
- Li, W.Z.; Yang, L.L.; Wen, Z.; Chen, J.L.; Wu, X. On the optimization strategy of EV charging station localization and charging piles density. Wirel. Commun. Mob. Comput. 2021, 99, 6675841. [Google Scholar] [CrossRef]
- Ding, C.; Cao, X.Y.; Naess, P. Applying Gradient Boosting Decision Trees to Examine Non-Linear Effects of the Built Environment on Driving Distance in Oslo. Transp. Res. A 2018, 110, 107–117. [Google Scholar] [CrossRef]
- Zhang, W.J.; Zhao, Y.J.; Cao, X.Y.; Lu, D.M.; Chai, Y.W. Nonlinear Effect of Accessibility on Car Ownership in Beijing: Pedestrian-Scale Neighborhood Planning. Transp. Res. D 2020, 86, 102445. [Google Scholar] [CrossRef]
- Ding, C.; Cao, X.Y.; Liu, C. How Does the Station-Area Built Environment Influence Metrorail Ridership? Using Gradient Boosting Decision Trees to Identify Non-Linear Thresholds. J. Transp. Geogr. 2019, 77, 70–78. [Google Scholar] [CrossRef]
- Chen, E.; Ye, Z.; Wu, H. Nonlinear effects of built environment on intermodal transit trips considering spatial heterogeneity. Transp. Res. D 2021, 90, 102677. [Google Scholar] [CrossRef]
- Christiansen, P.; Øystein, E.; Nils, F.; Jan, U.H. Parking facilities and the built environment: Impacts on travel behaviour. Transp. Res. A 2017, 95, 198–206. [Google Scholar] [CrossRef]
- Peng, J.X.; Jiang, Y.; Miao, D.M.; Li, R.; Xiao, W. Framing effects in medical situations: Distinctions of attribute, goal and risky choice frames. J. Int. Med. Res. 2013, 41, 771–776. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variables | Classification | Sample Size | Ratio |
|---|---|---|---|
| Gender | Male | 422 | 55.97% |
| Female | 332 | 43.10% | |
| Age | 18–35 | 339 | 44.96% |
| 36–59 | 415 | 50.96% | |
| Over 60 | 23 | 3.05% | |
| Annual income | 25,000–60,000 CNY (USD 3910–USD 9384) | 293 | 38.86% |
| 60,001–120,000 CNY (USD 9384–USD 18,768) | 389 | 51.59% | |
| Over 120,000 CNY (Over USD 18,768) | 72 | 9.55% | |
| Number of EVs owned | 1 | 458 | 60.74% |
| 2 | 233 | 30.90% | |
| 3 and over 3 | 63 | 8.36% |
| Property | Variables | Symbol | Connotation | Units |
|---|---|---|---|---|
| Non-built environment variables | Annual income | x1 | Income of the interviewee in one year | CNY |
| Charging time | x2 | Average charging time of an EV | Hours | |
| Age | x3 | — | Years old | |
| EV preference | x4 | Degree of preference for using EVs in daily travel (5-point Likert Scale) | / | |
| Public transport preference | x5 | Degree of preference for using public transport in daily travel (5-point Likert Scale) | / | |
| Built environment variable | Land use mix | x6 | Entropy index of POI land type in residential area | / |
| Public transport service level | x7 | Number of buses in the residential buffer zone | Vehicle/hour/buffer | |
| Road density | x8 | Total length of roads in residential buffer zone | m/buffer | |
| Intersection density | x9 | Number of intersections in residential buffer zone | num/buffer | |
| population density | x10 | Grid data of population density of residential area | Person/km2 | |
| Distance to the nearest business district | x11 | Distance between residential area and nearest business district in Chongqing | m/buffer | |
| Charging pile density | x12 | Number of charging piles in the buffer zone of residence | num/buffer | |
| Explained variable | eVMT | y | EV miles traveled in the past one year | km |
| Variables | GBDT | OLS | ||
|---|---|---|---|---|
| Relative Importance | Cumulative Importance | Estimated Coefficient | Impact | |
| Charging time | 18.37% | 18.37% | −2.24 | − |
| Charging pile density | 15.24% | 33.61% | 1.84 | + |
| EV preference | 11.52% | 45.13% | 0.98 | + |
| Distance | 10.28% | 55.41% | 0.52 | + |
| Road density | 7.61% | 63.02% | 1.07 | + |
| Public transport service level | 7.43% | 70.45% | −0.84 | − |
| Annual income | 7.27% | 77.72% | 0.47 | + |
| Land use mix | 6.36% | 84.08% | −0.36 | − |
| Public transport preference | 4.77% | 88.85% | −0.13 | − |
| Age | 4.41% | 93.26% | −0.32 | − |
| Intersection density | 3.68% | 96.94% | −0.09 | − |
| Population density | 3.06% | 100.00% | 0.04 | + |
| MAPE | 9.62% | 21.34% | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, X.; Cao, Y.; Peng, T.; Gao, R.; Dai, G. Nonlinear Influence Model of Built Environment of Residential Area on Electric Vehicle Miles Traveled. World Electr. Veh. J. 2021, 12, 247. https://doi.org/10.3390/wevj12040247
Hu X, Cao Y, Peng T, Gao R, Dai G. Nonlinear Influence Model of Built Environment of Residential Area on Electric Vehicle Miles Traveled. World Electric Vehicle Journal. 2021; 12(4):247. https://doi.org/10.3390/wevj12040247
Chicago/Turabian StyleHu, Xinghua, Yanshi Cao, Tao Peng, Runze Gao, and Gao Dai. 2021. "Nonlinear Influence Model of Built Environment of Residential Area on Electric Vehicle Miles Traveled" World Electric Vehicle Journal 12, no. 4: 247. https://doi.org/10.3390/wevj12040247
APA StyleHu, X., Cao, Y., Peng, T., Gao, R., & Dai, G. (2021). Nonlinear Influence Model of Built Environment of Residential Area on Electric Vehicle Miles Traveled. World Electric Vehicle Journal, 12(4), 247. https://doi.org/10.3390/wevj12040247