
Research on Automatic Parking System Strategy


Abstract
:1. Introduction
2. The Initialization Program
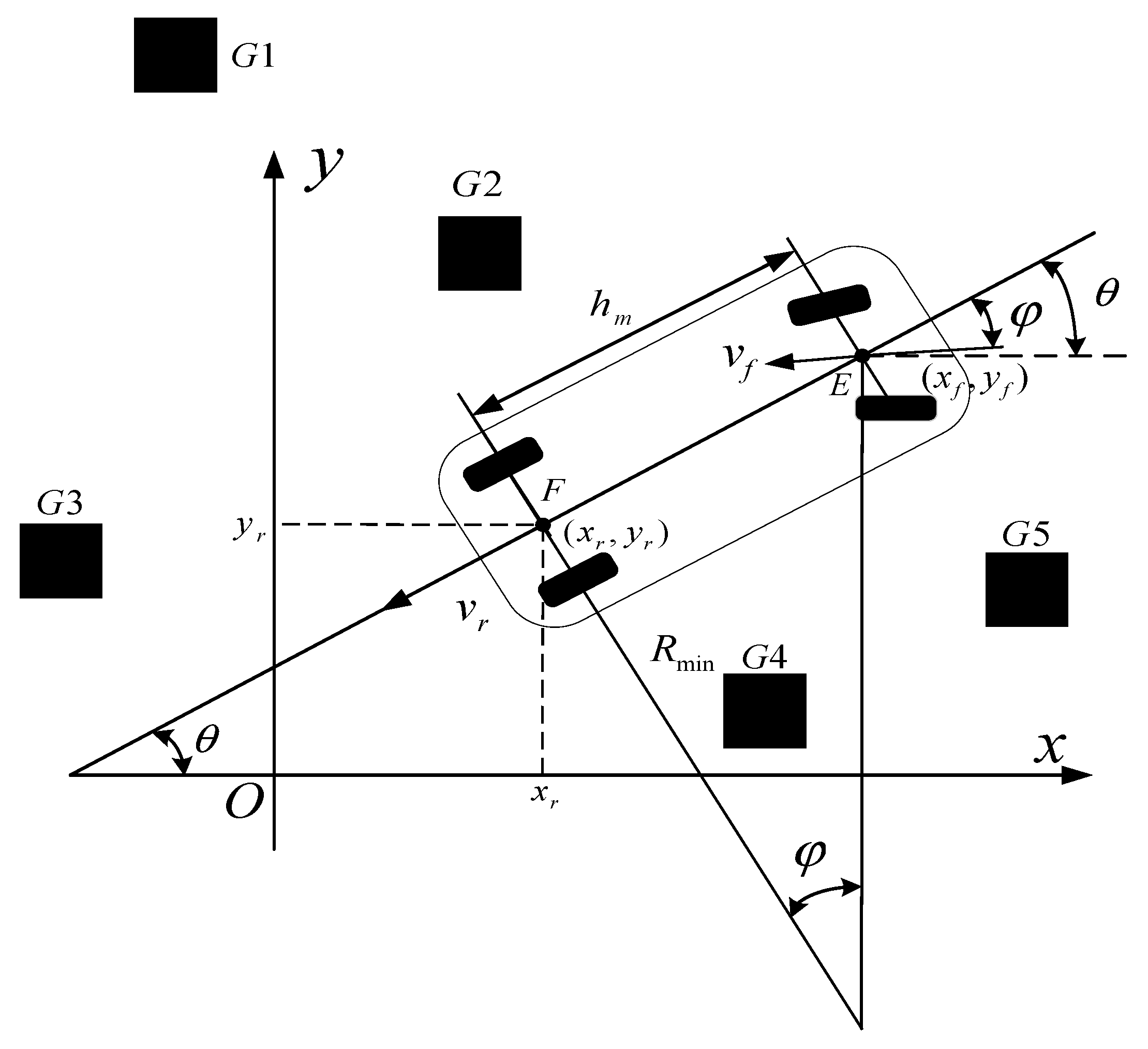
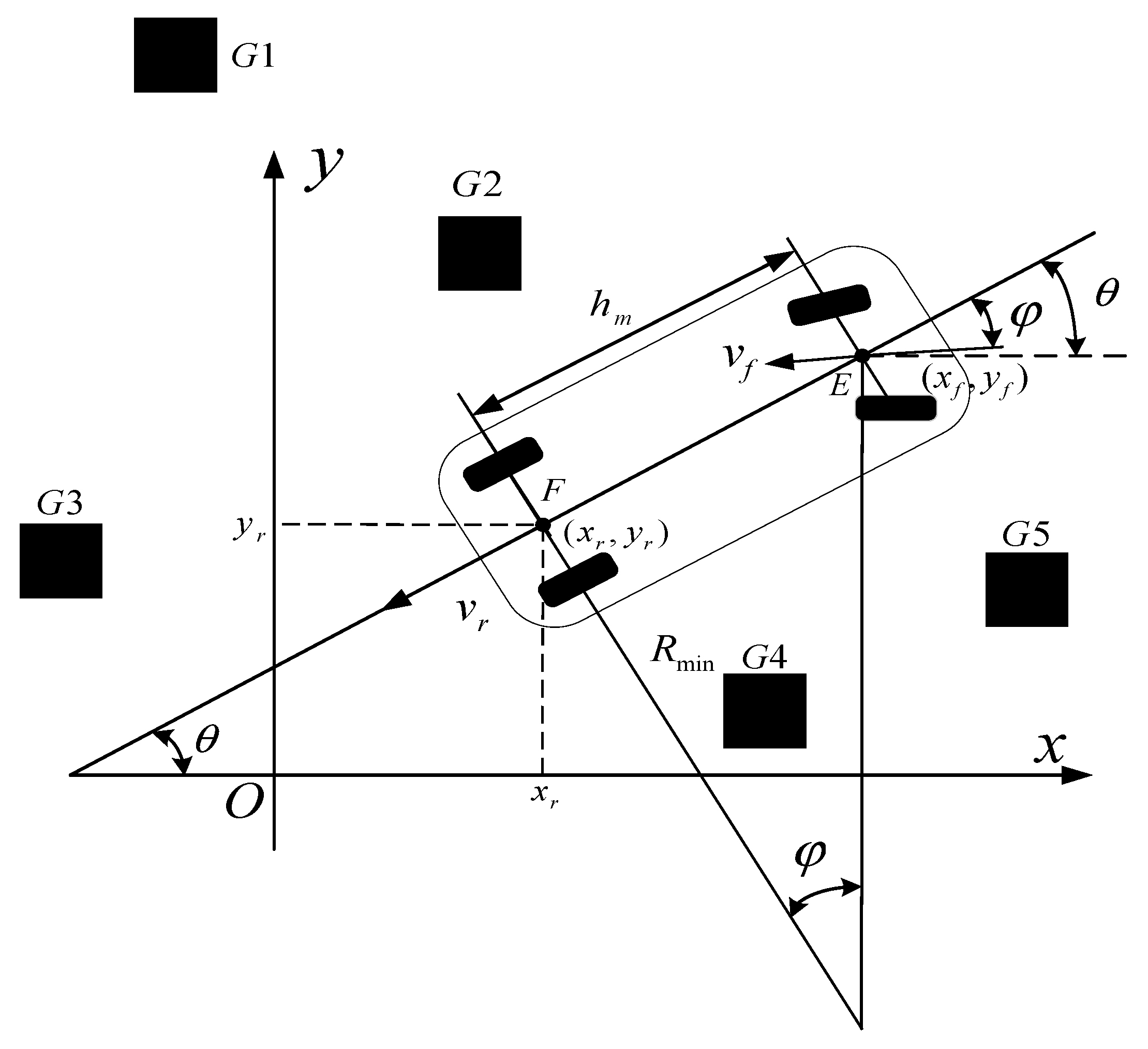
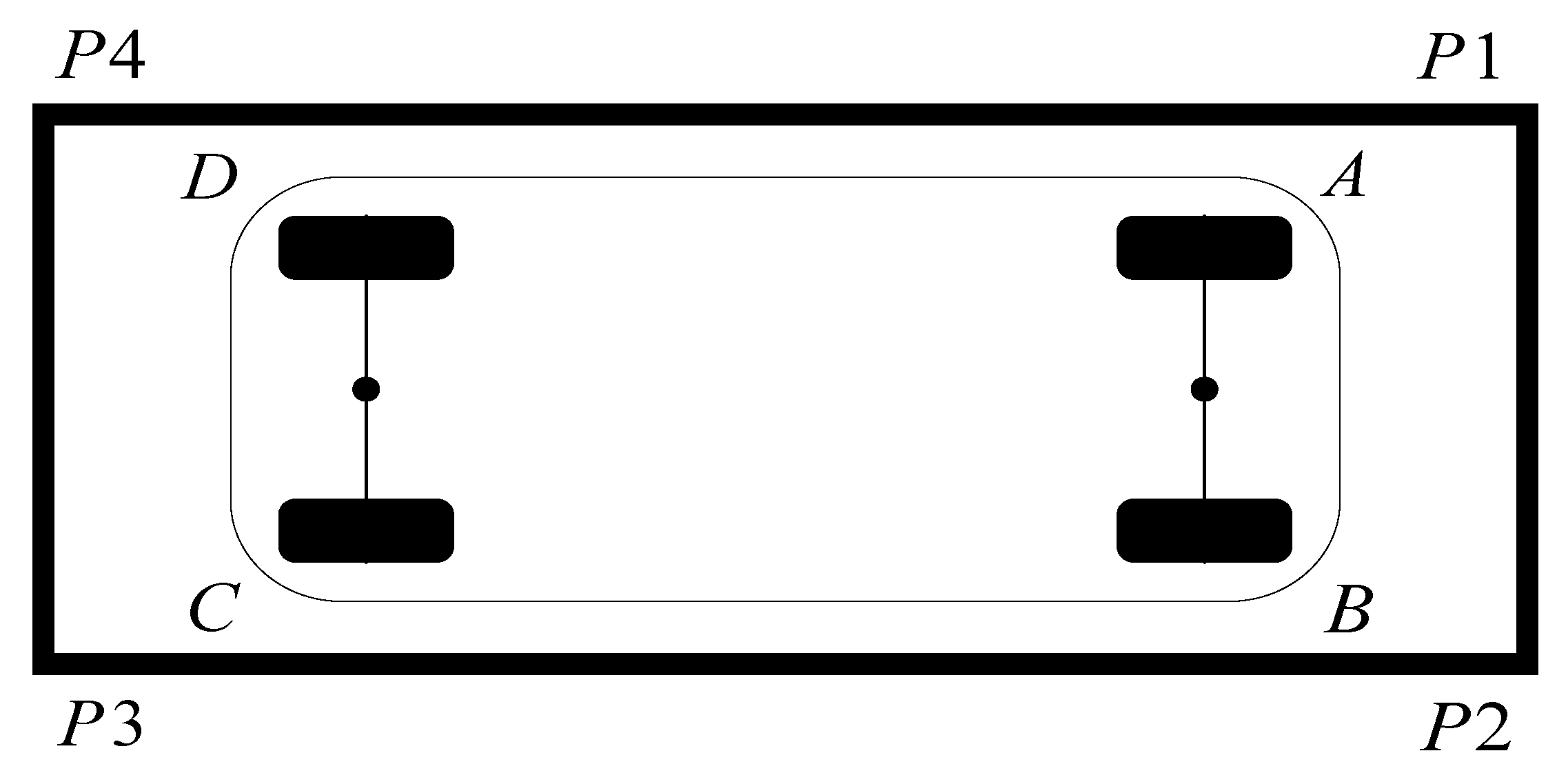
2.1. Vehicle Kinematics Model
2.2. Kinematic Constraints
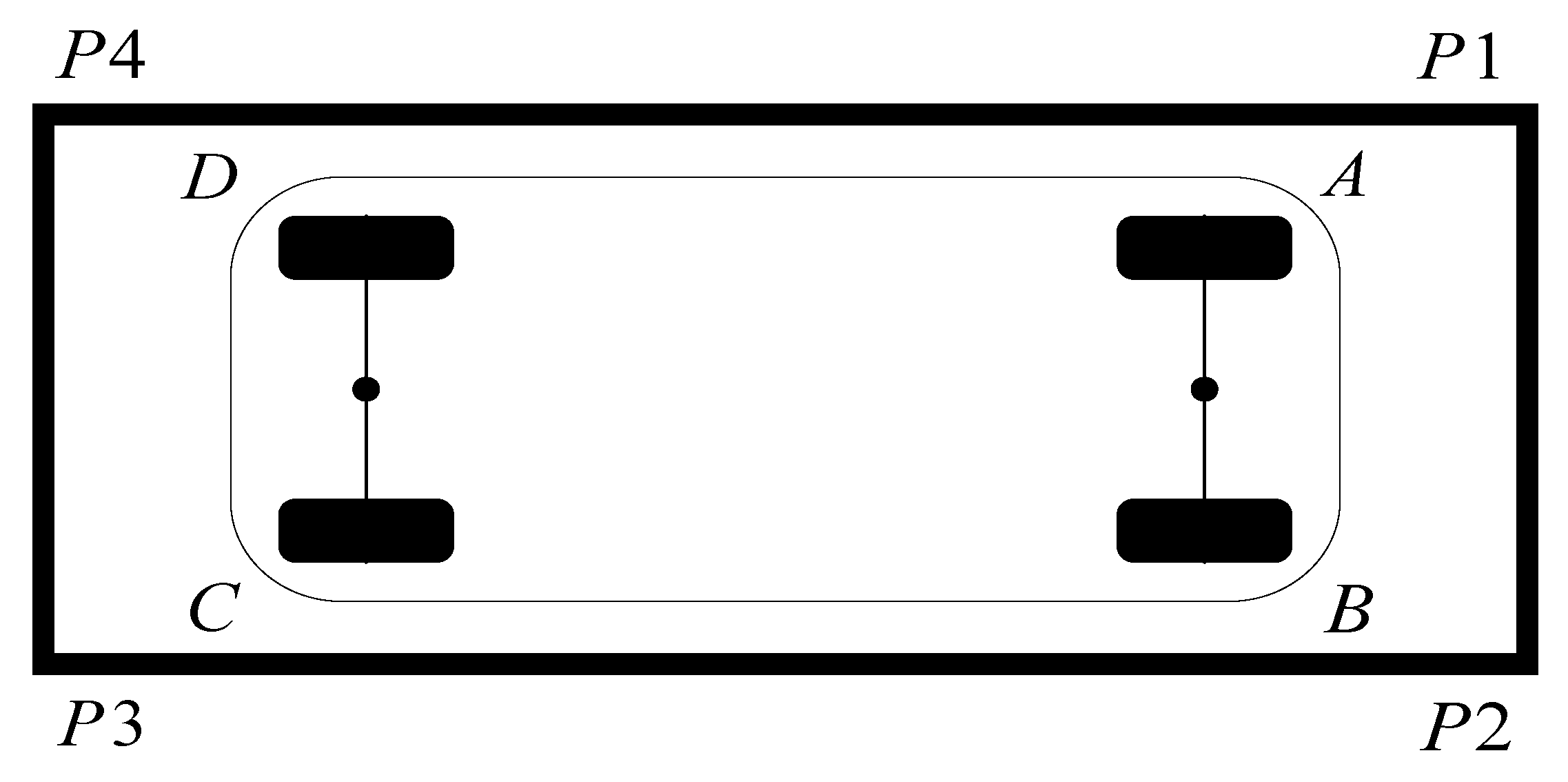
2.3. Boundary Conditions
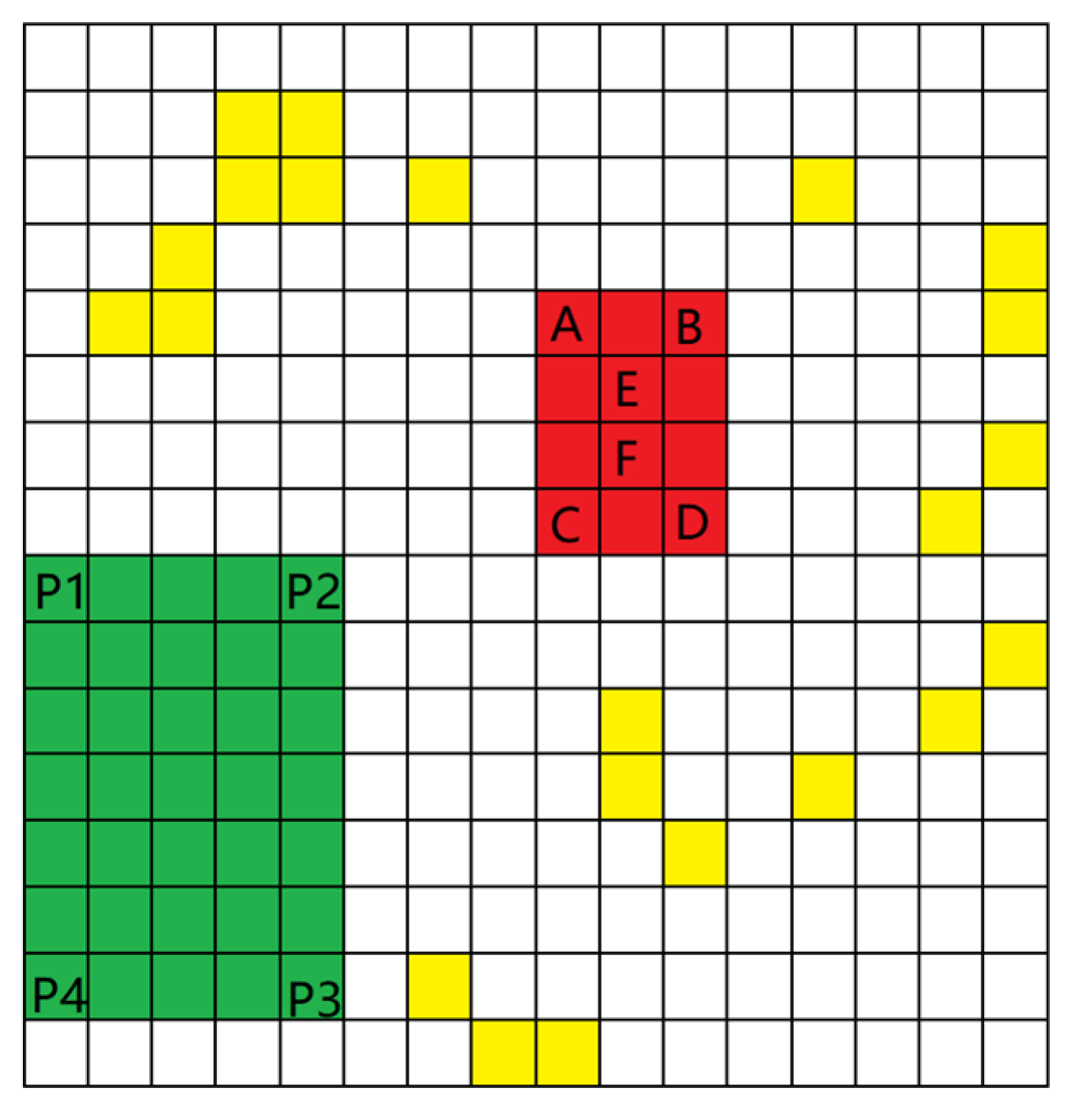
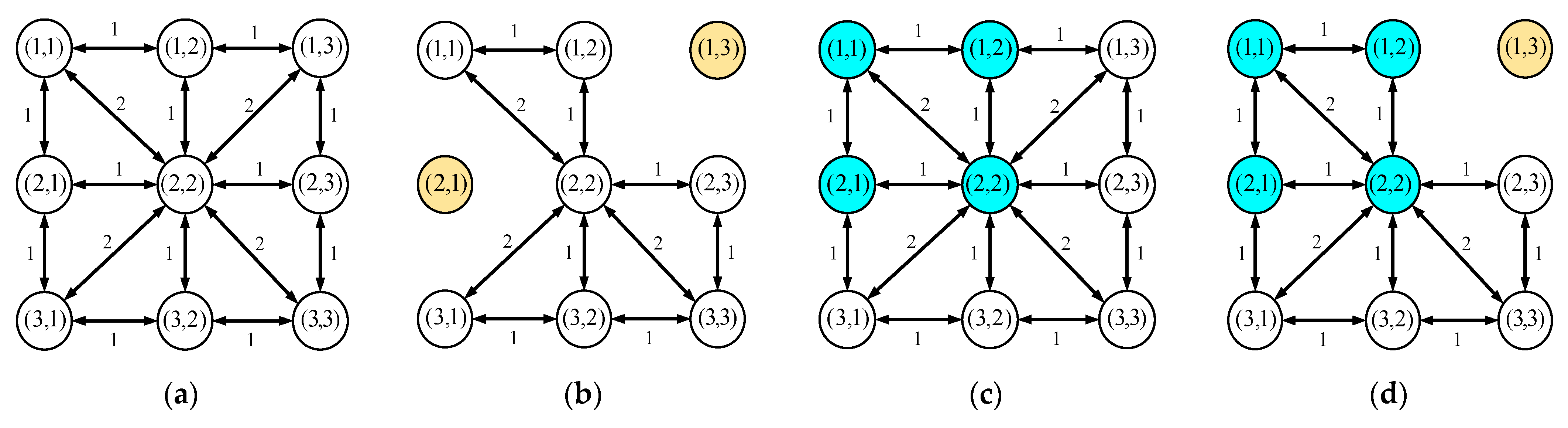
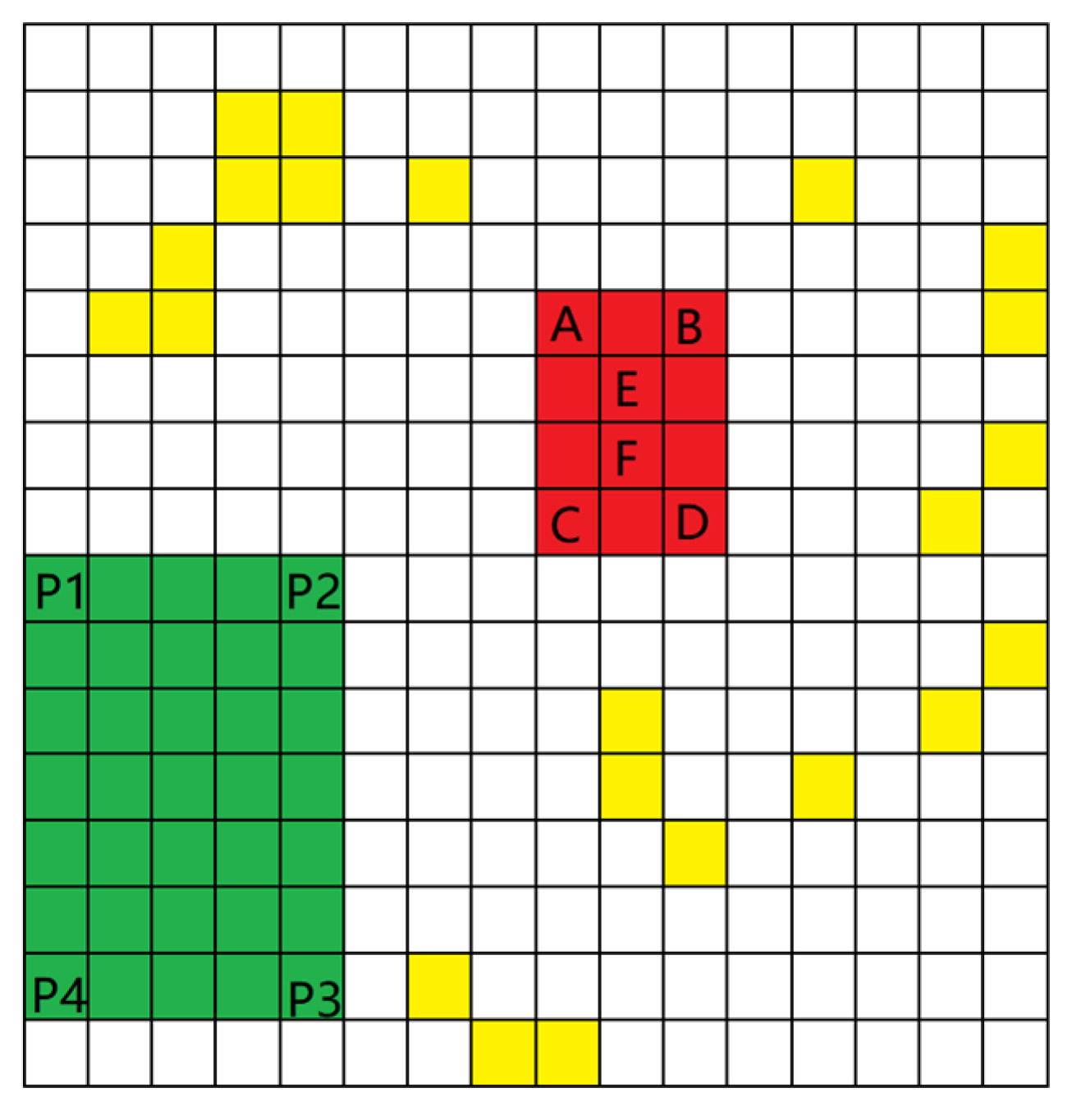
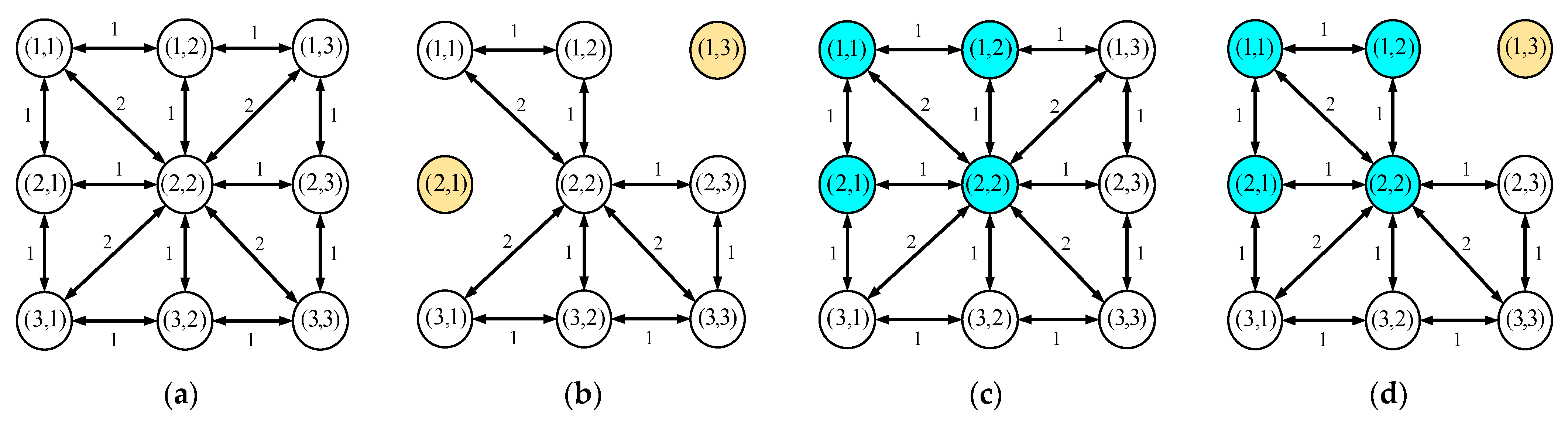
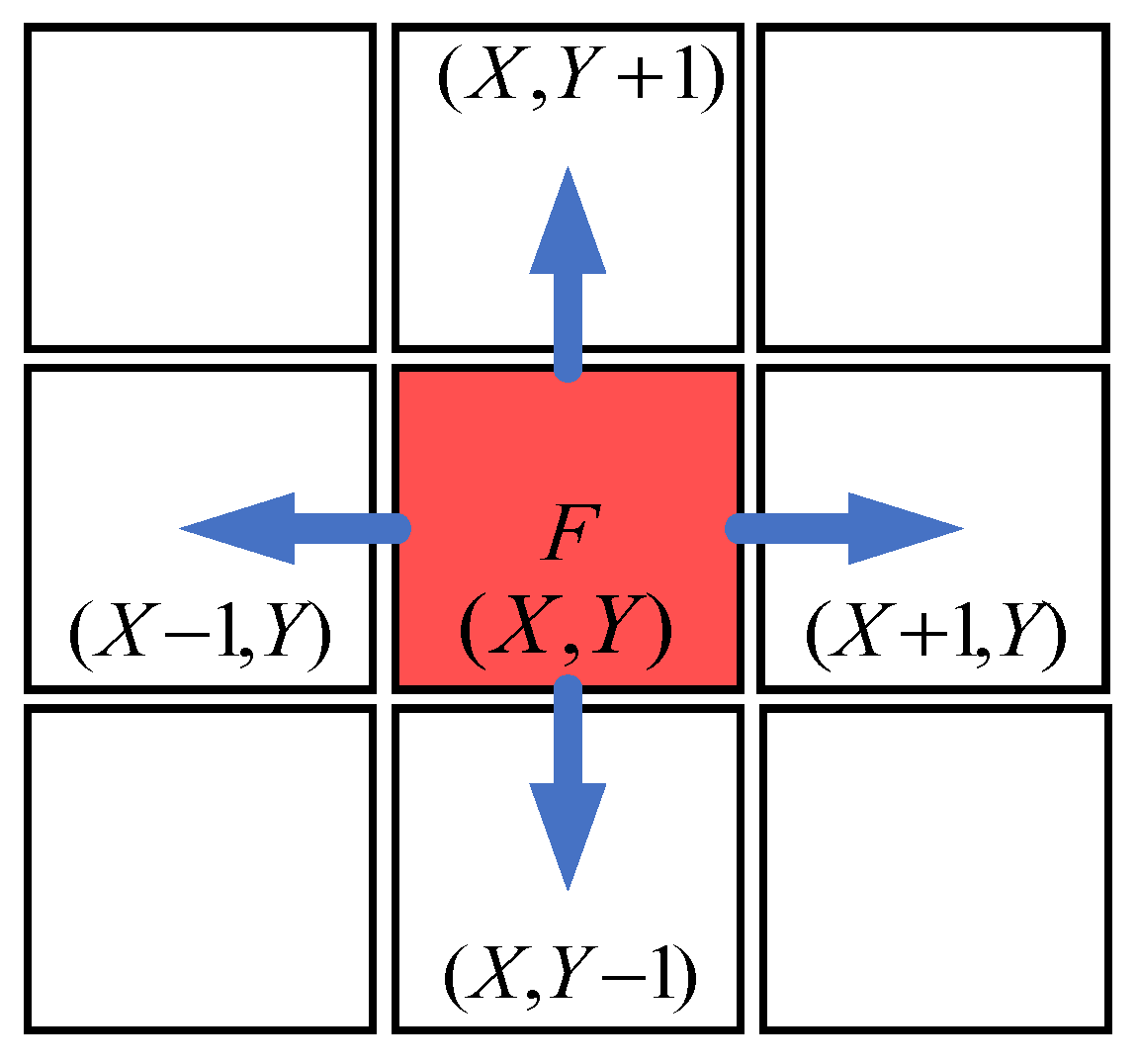
2.4. Weighted Ring Graph
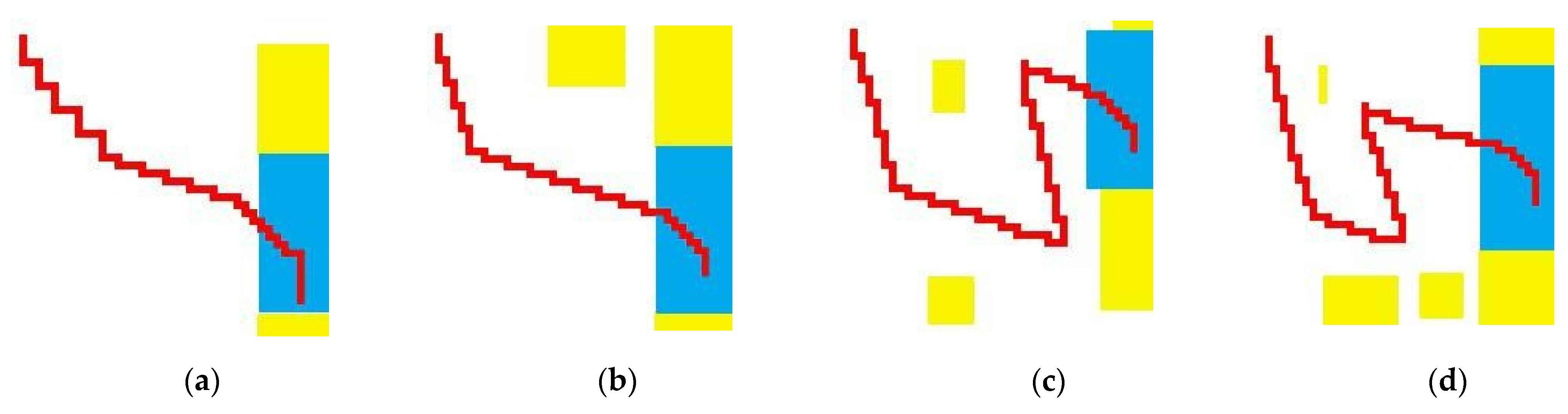
3. Parking Path Planning
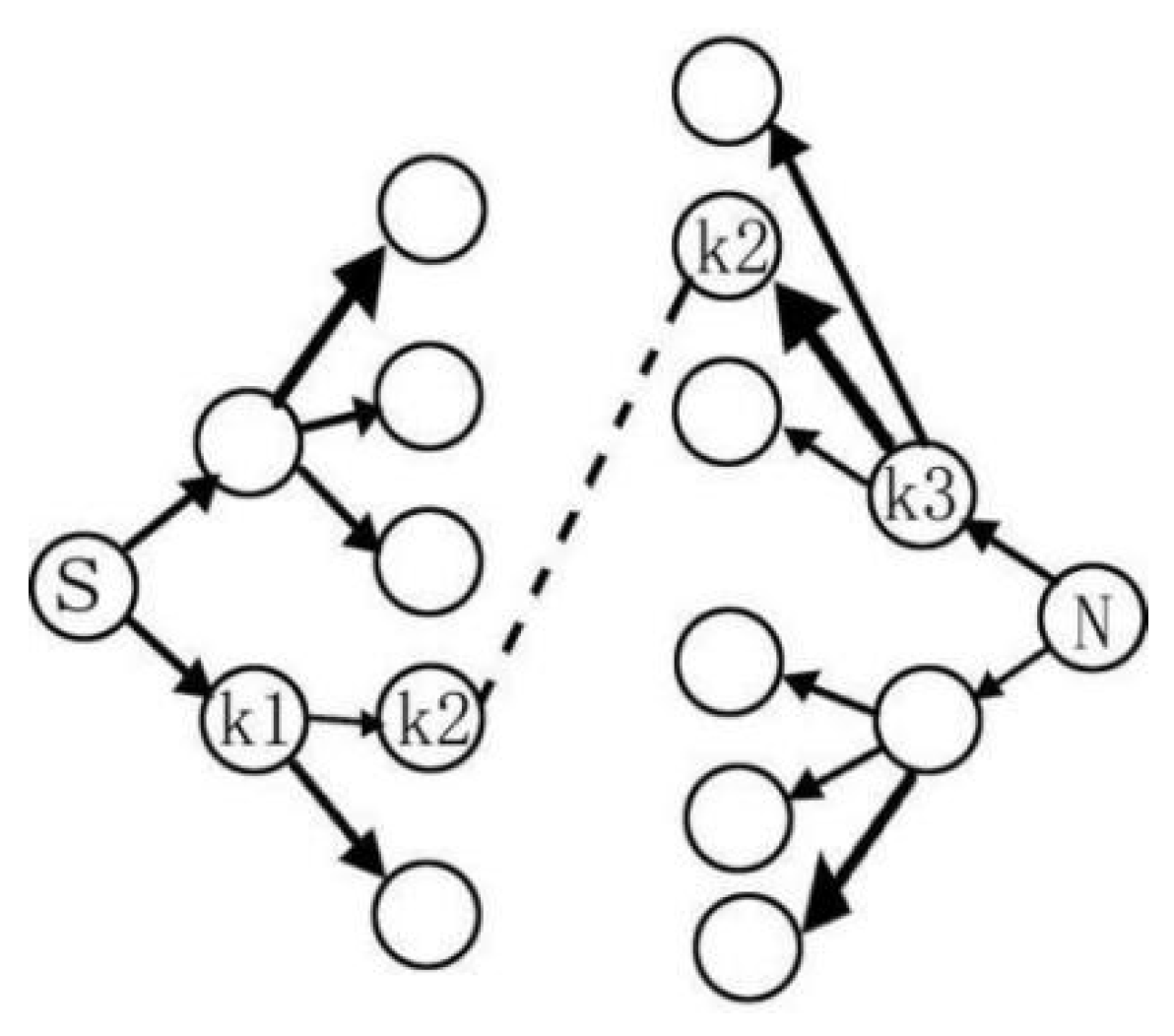
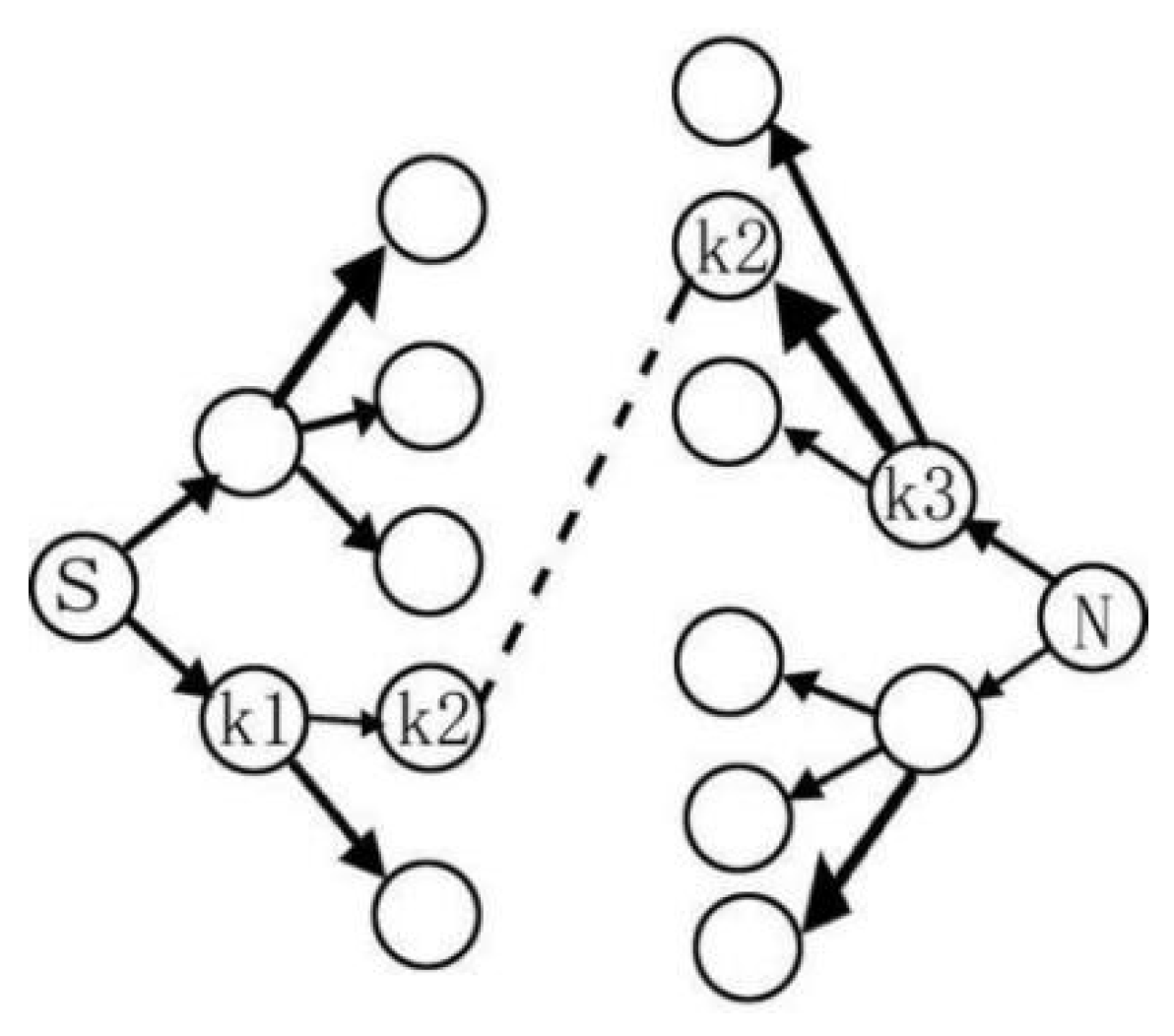
3.1. Bidirectional Breadth-First Search Design Based on Parking Environment
3.2. Traditional Bellman–Ford Algorithm
3.3. Modified Bellman–Ford Algorithm
3.4. Parking Paths Smooth
- (1)
- The zero-th boundary condition. The condition satisfies the relation: .
- (2)
- The first boundary condition. At the endpoint, the first derivative is given, and if and , the following relationship is satisfied.
- (3)
- The second boundary condition. For the second derivative of a given endpoint, if and , the following relation can be deduced.
4. Results and Discussion
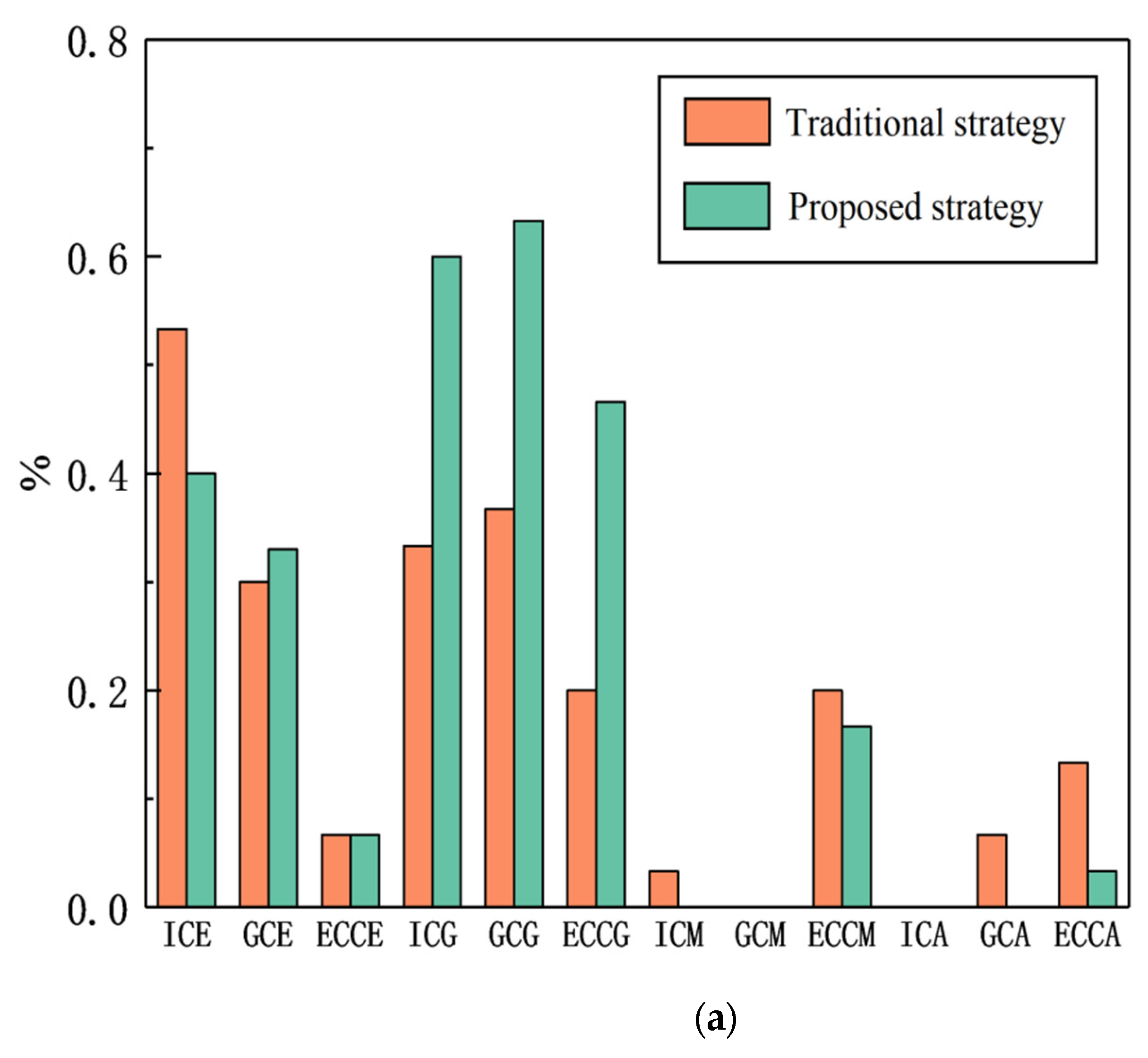
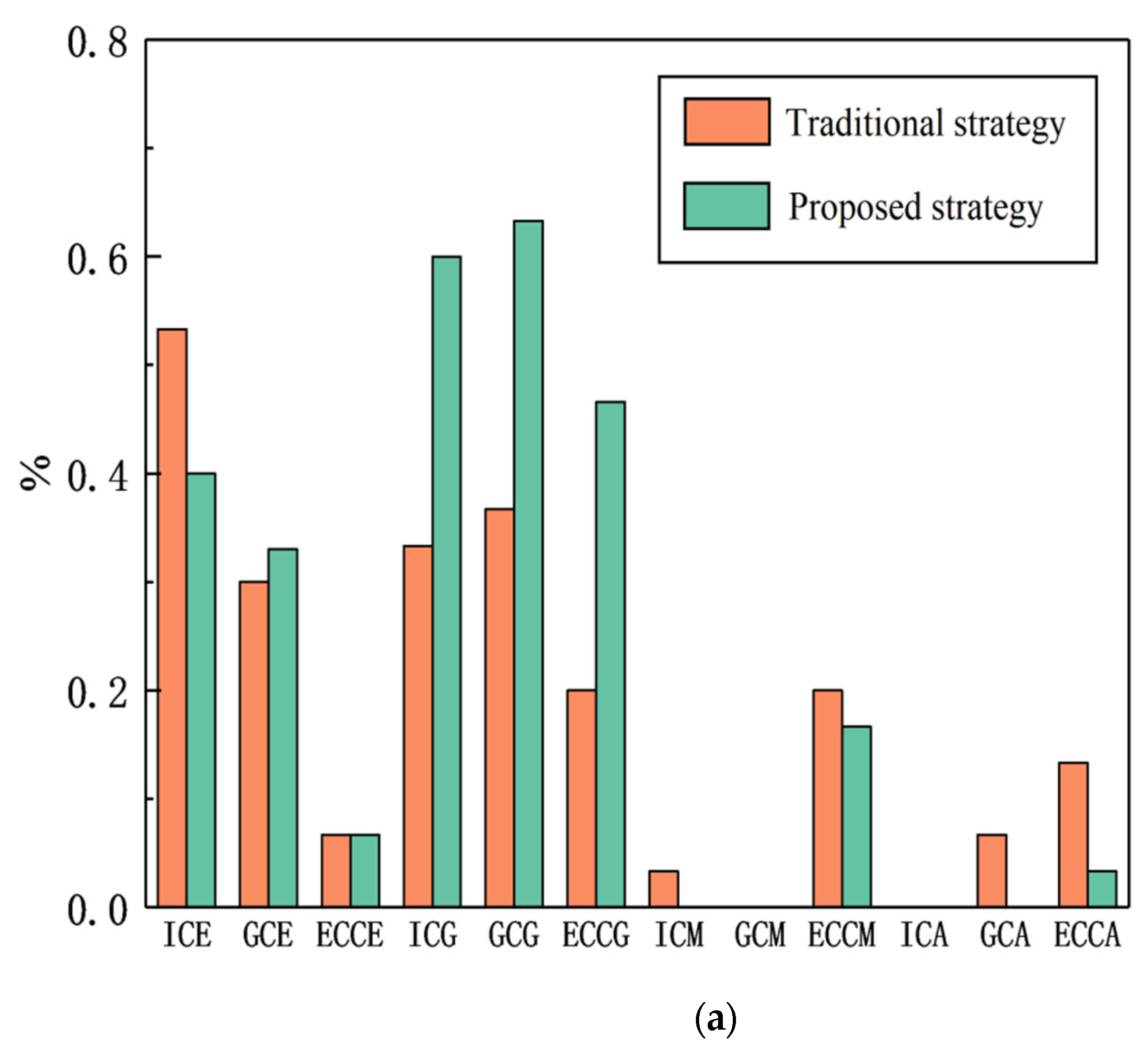
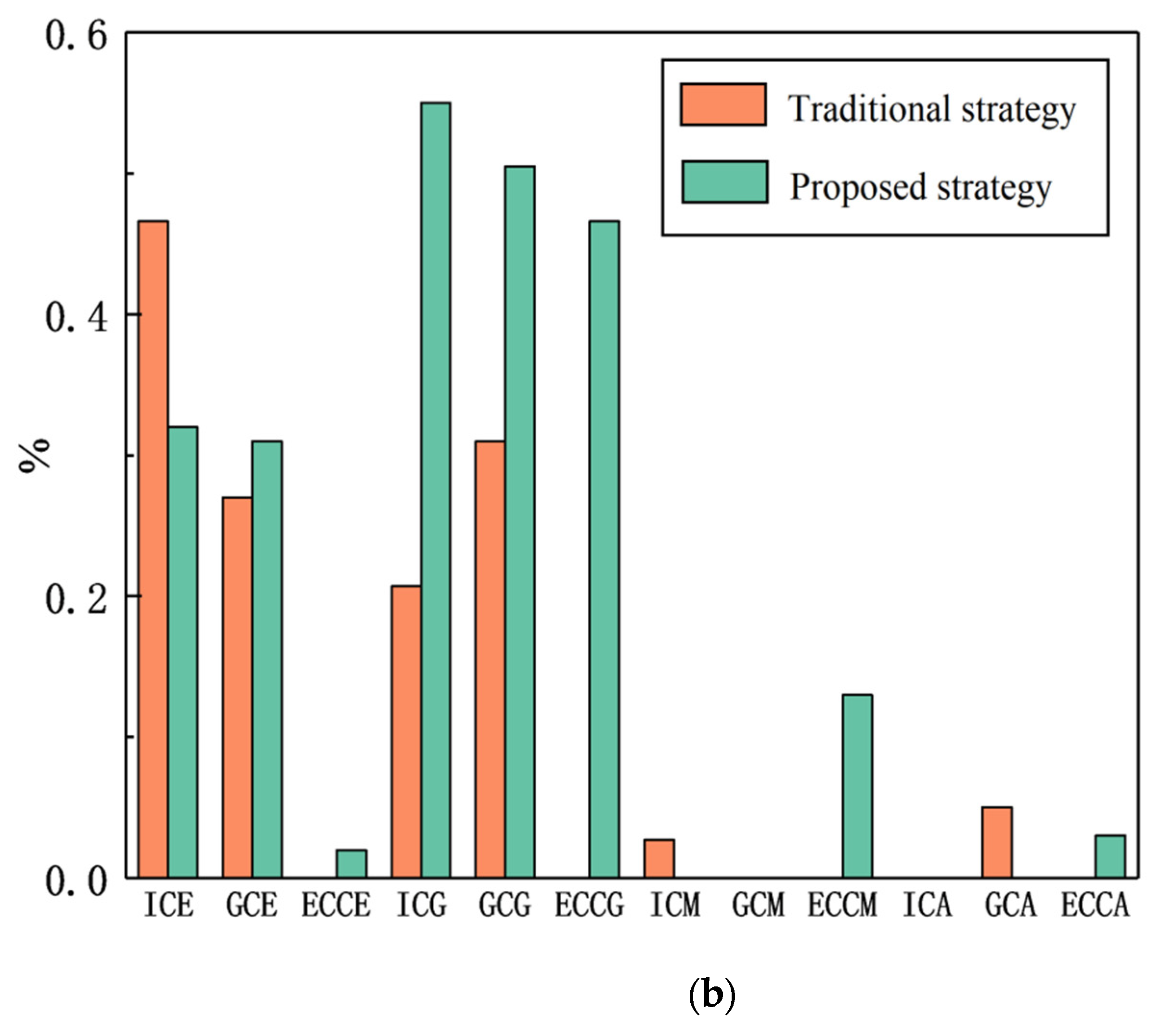
4.1. Comparison of Experimental Results between Proposed Automatic Parking System and Traditional Path Planning Strategy
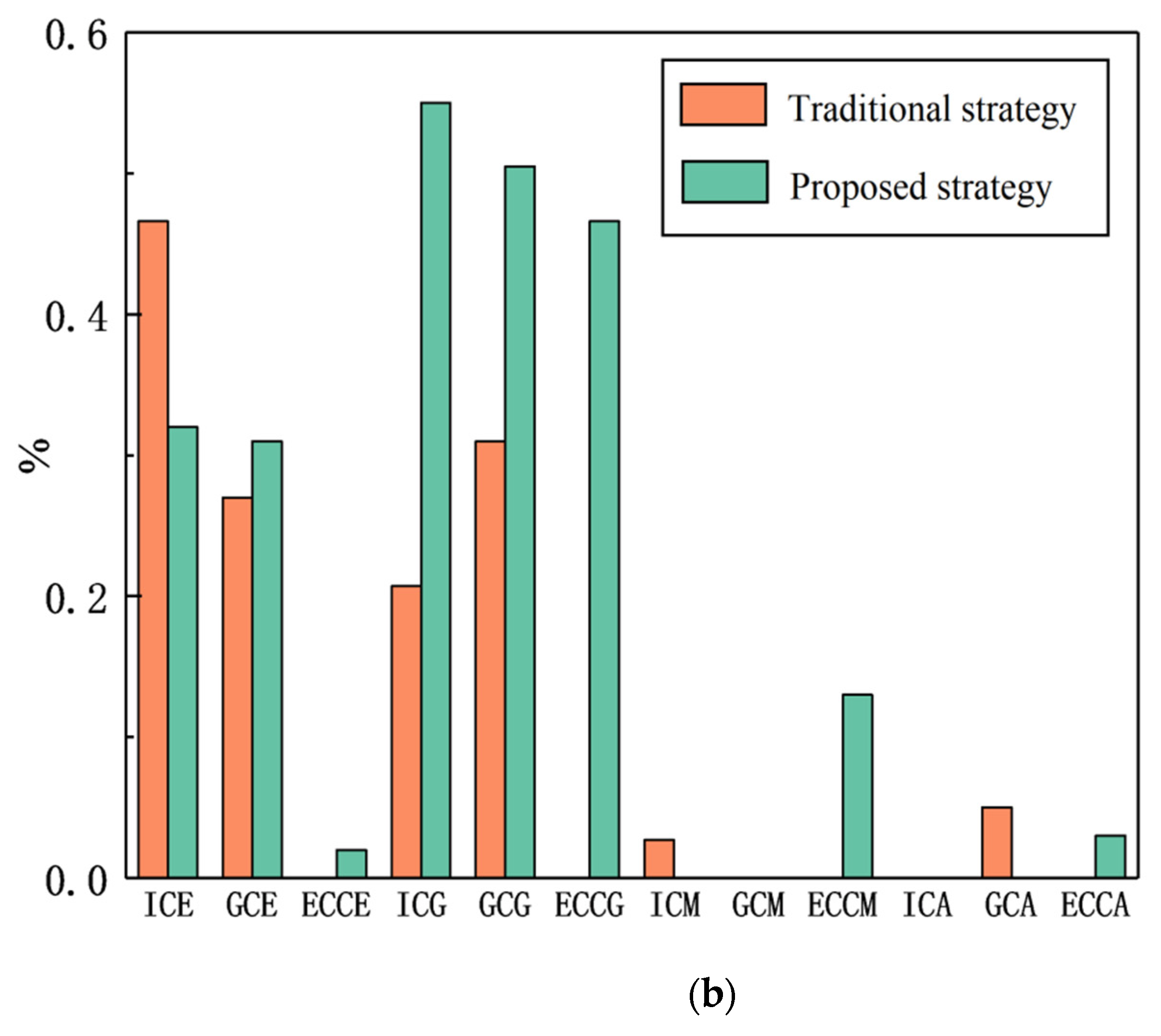
4.2. Comparison of Experimental Results between Proposed Automatic Parking System and Similar Path Planning Strategy
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Rajamani, R.; Shladover, S.E. An experimental comparative study of autonomous and co-operative vehicle-follower control systems. Transp. Res. Part C Emerg. Technol. 2001, 9, 15–31. [Google Scholar] [CrossRef]
- Goodall, N.J. Ethical Decision Making during Automated Vehicle Crashes. Transp. Res. Rec. 2018, 2424, 58–65. [Google Scholar] [CrossRef] [Green Version]
- Thrun, S.; Montemerlo, M.; Dahlkamp, H.; Stavens, D.; Aron, A.; Diebel, J.; Fong, P.; Gale, J.; Halpenny, M.; Hoffmann, G.; et al. Stanley: The robot that won the DARPA Grand Challenge. J. Field Robot. 2006, 23, 661–692. [Google Scholar] [CrossRef]
- Lijarcio, I.; Useche, S.A.; Llamazares, J.; Montoro, L. Perceived benefits and constraints in vehicle automation: Data to assess the relationship between driver’s features and their attitudes towards autonomous vehicles. Data Brief 2019, 27, 104662. [Google Scholar] [CrossRef]
- Chen, Z.; Qiu, J.; Sheng, B.; Li, P.; Wu, E. GPSD: Generative parking spot detection using multi-clue recovery model. Vis. Comput. 2021, 37, 2657–2669. [Google Scholar] [CrossRef]
- Patil, S.; Changle, A.; Pagare, S. Automatic Car Parking System. Int. J. Adv. Res. Sci. Commun. Technol. 2021, 36, 120–123. [Google Scholar] [CrossRef]
- Sahare, S.; Moon, S.; Jaykar, S.; Shambharkar, S. Vision Based Automated Parking System. Int. J. Adv. Res. Sci. Commun. Technol. 2021, 51, 719–724. [Google Scholar] [CrossRef]
- Gao, H.; Zhu, J.; Li, X.; Kang, Y.; Su, H. Automatic Parking Control of Unmanned Vehicle Based on Switching Control Algorithm and Backstepping. IEEE/ASME Trans. Mechatron. 2020, 99, 1. [Google Scholar] [CrossRef]
- Evdokimova, T.; Sinodkin, A.; Fedosova, L.; Tyrikov, M. Algorithm for constructing a global trajectory of traffic and planning of the automatic parking route of the self-driving car. Int. J. Adv. Robot. Syst. 2020, 4, 61–67. [Google Scholar] [CrossRef]
- Chen, X.; Mai, H.; Zhang, Z.; Gu, F. A novel adaptive pseudo spectral method for the optimal control problem of automatic car parking. Asian J. Control 2021. [Google Scholar] [CrossRef]
- Zhang, J.; Li, Z.; Li, L.; Li, Y.; Dong, H. A bi-level cooperative operation approach for AGV based automated valet parking. Transp. Res. Part C Emerg. Technol. 2021, 128, 103140. [Google Scholar] [CrossRef]
- Navarro-B, J.E.; Gebert, M.; Bielig, R. On automatic extraction of on-street parking spaces using park-out events data. In Proceedings of the 2021 IEEE International Conference on Omni-Layer Intelligent Systems (COINS), Barcelona, Spain, 23–25 August 2021; pp. 1–7. [Google Scholar]
- Tirado, G.B.; Semwal, S.K. Autonomous Parking Spot Detection System for Mobile Phones using Drones and Deep Learning. In Proceedings of the WSCG “2021-29 International Conference in Central Europe on Computer Graphics, Visualization and Computer Vision” 2021, Bilson, Czechia, 17–19 May 2021; pp. 115–124. [Google Scholar]
- Yu, W.; Zhang, N.Y.; Bai, F. Fuzzy optimal control scheme for reversing problem. Mechanotronics 2001, 5, 21–24. [Google Scholar]
- Wu, J.Q.; Song, X.G. Review on key technology development of intelligent highway. J. Shandong Univ. 2020, 4, 52–69. [Google Scholar]
- Yu, J.; Jin, X. Research on automatic parking System based on Fuzzy control. Heilongjiang Sci. Technol. Inf. 2013, 85. [Google Scholar]
- Xie, W.X.; Gao, X.B. Fuzzy rule extraction method based on clustering validity neural network. J. Shenzhen Univ. 2003, 20, 14–21. [Google Scholar]
- Li, Z.J. Research on Fuzzy Control Method for Automatic Parking of Vehicles. Ph.D. Thesis, Jilin University, Changchun, China, 2016. [Google Scholar]
- Lee, M.; Kim, S.; Lim, W.; Sunwoo, M. Probabilistic Occupancy Filter for Parking Slot Marker Detection in an Autonomous Parking System Using AVM. IEEE Trans. Intell. Transp. Syst. 2018, 20, 2389–2394. [Google Scholar] [CrossRef]
- Piao, C.; Zhang, J.; Chang, K.; Li, Y.; Liu, M. Multi-Sensor Information Ensemble-Based Automatic Parking System for Vehicle Parallel/Nonparallel Initial State. Sensors 2021, 21, 2261. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.J.; Hou, Z.S. Automatic parking scheme based on model-free adaptive control. Control Decis. 2021, 1001, 1–10. [Google Scholar]
- Li, J.Z.; Long, Q. An Automatic Parking Model Based on Deep Reinforcement Learning. J. Phys. Conf. Ser. 2021, 1, 1883. [Google Scholar]
- Zhang, H.W.; Huang, H.Y.; Wang, K.Y. Research status and prospect of precise movement system for military special vehicles. J. Ordnance Eng. Coll. 2017, 29, 71–74. [Google Scholar]
- Sun, Y.F.; Zhang, G. Design of automatic vertical parking system by fuzzy control based on FPGA. Mech. Des. Manuf. Eng. 2016, 45, 50–53. [Google Scholar]
- Sun, F. Research on fuzzy control strategy of automatic vertical Parking system. J. Autom. Instrum. 2016, 11, 89–90. [Google Scholar]
- Xue, L.; Leng, Y.; Lian, X. Automotive Parking Assistant Testing Scene analysis and evaluation research. J. Phys. Conf. Ser. 2021, 1, 1873. [Google Scholar] [CrossRef]
- Gao, F.; Zhang, Q.; Han, Z.; Yang, Y. Evolution test by improved genetic algorithm with application to performance limit evaluation of automatic parallel parking system. IET Intell. Transp. Syst. 2021, 15, 754–764. [Google Scholar] [CrossRef]
- Miao, C.; Chen, G.; Yan, C.; Wu, Y.Y. Path planning optimization of indoor mobile robot based on adaptive ant colony algorithm. Comput. Ind. Eng. 2021, 156, 107230. [Google Scholar] [CrossRef]
- Zhang, R.Y.; Cao, K.; Yu, S.Y.; Yu, Y. Research on generation and simulation of parking trajectory based on Spline Theory. Agric. Equip. Veh. Eng. 2014, 52, 27–31. [Google Scholar]
- Montoro, L.; Useche, S.A.; Alonso, F.; Lijarcio, I.; Bosó-Seguí, P.; Martí-Belda, A. Perceived safety and attributed value as predictors of the intention to use autonomous vehicles: A national study with Spanish drivers. Saf. Sci. 2019, 120, 865–876. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Parameter | |
|---|---|---|
| Experimental vehicle parameters | Width/Wd | 17.8 cm |
| Wheel base/hm | 19.4 cm | |
| Length/L | 28.5 cm | |
| Distance between front wheel axle and nose/Lbegin | 5.4 cm | |
| Distance between rear axle and rear axle/Lend | 2.5 cm | |
| Minimum turning radius/Rmin | 33.28 cm | |
| Experimental site parameters | Length/Cow | 118.9 cm |
| Width/Col | 84.1 cm | |
| Number of parking Spaces available | 1 | |
| Boundary condition | One side of the parking space is shielded with a height of about 40 cm |
| Traditional | Proposed | |||||||
|---|---|---|---|---|---|---|---|---|
| Experiment Conditions | Actual Success Rate | Ideal Success Rate | Average Vehicle Moving Time (s) | Average Algorithm Running Time (ms) | Actual Success Rate | Ideal Success Rate | Average Vehicle Moving Time (s) | Average Algorithm Running Time (ms) |
| Ideal conditions | 86.7% | 90.0% | 47.3743 | 1.010 | 84.3% | 100% | 47.2273 | 7297.2 |
| General complex conditions | 60.0% | 73.3% | 44.7203 | 1.003 | 63.3% | 90.0% | 45.0593 | 7870.1 |
| Extremely complex conditions | 0.0% | 53.3% | 47.9330 | 1.001 | 23.3% | 66.7% | 50.2448 | 10,599.4 |
| n, m | The Similar Method | The Proposed Strategy | ||
|---|---|---|---|---|
| Step Number | Computing Time (ms) | Step Number | Computing Time (ms) | |
| 82 | 3.75 | 78 | 732.11 | |
| 86 | 4.09 | 86 | 783.56 | |
| 91 | 5.21 | 89 | 964.29 | |
| 91 | 5.87 | 90 | 981.01 | |
| 94 | 6.88 | 89 | 1035.22 | |
| 99 | 7.55 | 92 | 1104.21 | |
| 108 | 7.92 | 101 | 1326.89 | |
| 113 | 9.69 | 104 | 1568.53 | |
| 121 | 10.63 | 115 | 1925.16 | |
| 130 | 12.01 | 120 | 2011.05 | |
| n, m | The Similar Method | The Proposed Strategy | ||
|---|---|---|---|---|
| Step Number | Computing Time (ms) | Step Number | Computing Time (ms) | |
| 96 | 5.23 | 91 | 812.25 | |
| 105 | 7.86 | 100 | 901.02 | |
| 121 | 8.05 | 119 | 1021.01 | |
| 133 | 9.42 | 121 | 1125.69 | |
| 145 | 10.21 | 136 | 1368.53 | |
| 151 | 11.85 | 141 | 1685.57 | |
| 167 | 12.05 | 157 | 1956.58 | |
| 187 | 15.36 | 174 | 2012.55 | |
| 192 | 17.69 | 182 | 2114.09 | |
| 201 | 19.62 | 191 | 2456.38 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, C.; Zhou, R.; Lei, L.; Yang, X. Research on Automatic Parking System Strategy. World Electr. Veh. J. 2021, 12, 200. https://doi.org/10.3390/wevj12040200
Zhang C, Zhou R, Lei L, Yang X. Research on Automatic Parking System Strategy. World Electric Vehicle Journal. 2021; 12(4):200. https://doi.org/10.3390/wevj12040200
Chicago/Turabian StyleZhang, Chuanwei, Rui Zhou, Lei Lei, and Xinyue Yang. 2021. "Research on Automatic Parking System Strategy" World Electric Vehicle Journal 12, no. 4: 200. https://doi.org/10.3390/wevj12040200
APA StyleZhang, C., Zhou, R., Lei, L., & Yang, X. (2021). Research on Automatic Parking System Strategy. World Electric Vehicle Journal, 12(4), 200. https://doi.org/10.3390/wevj12040200