
A Thrust Cooperative Control Strategy of Multiple Propulsion Motors for Distributed Electric Propulsion Aircraft

Abstract
:1. Introduction
2. Thrust Cooperative Control Strategy
2.1. Synchronous Cooperative Control Strategy
2.1.1. Relative Coupling Control
2.1.2. Improved Relative Coupling Control
2.2. Distributed Cooperative Control Strategy
3. Results
3.1. Simulation Verification
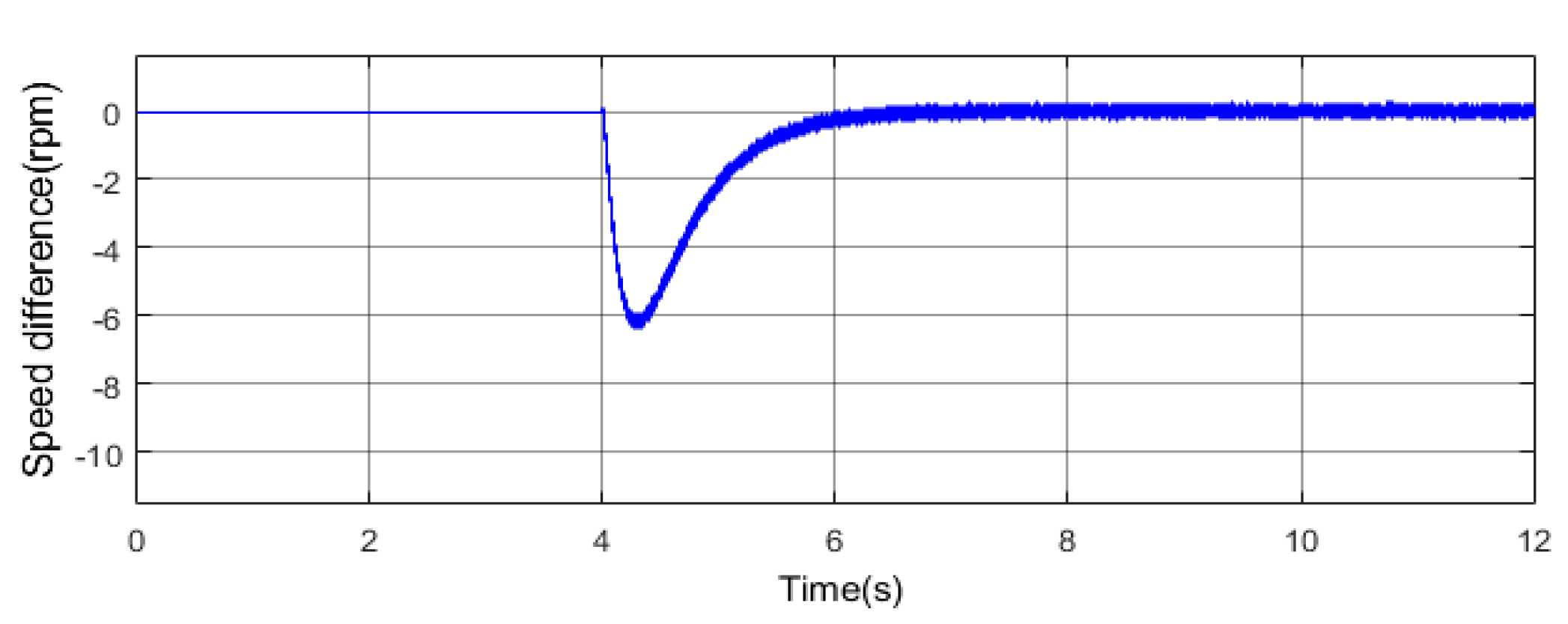
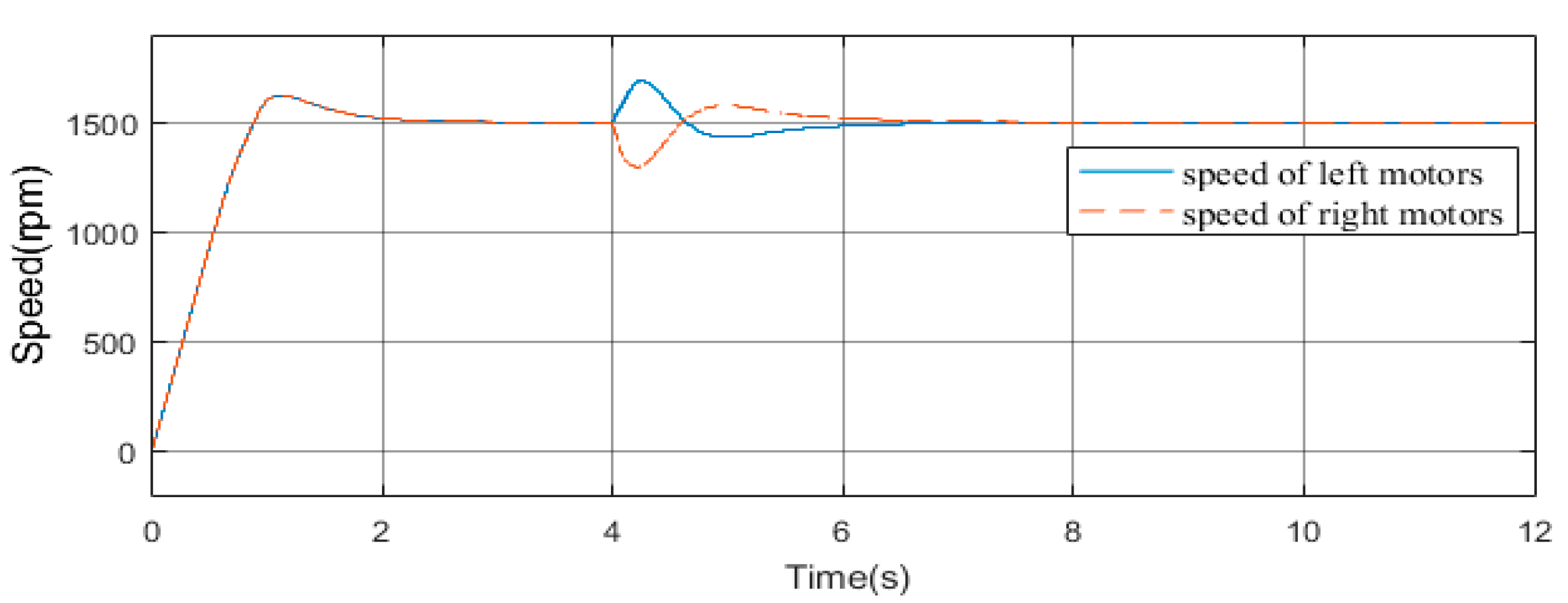
3.1.1. Simulation of Synchronous Cooperative Control
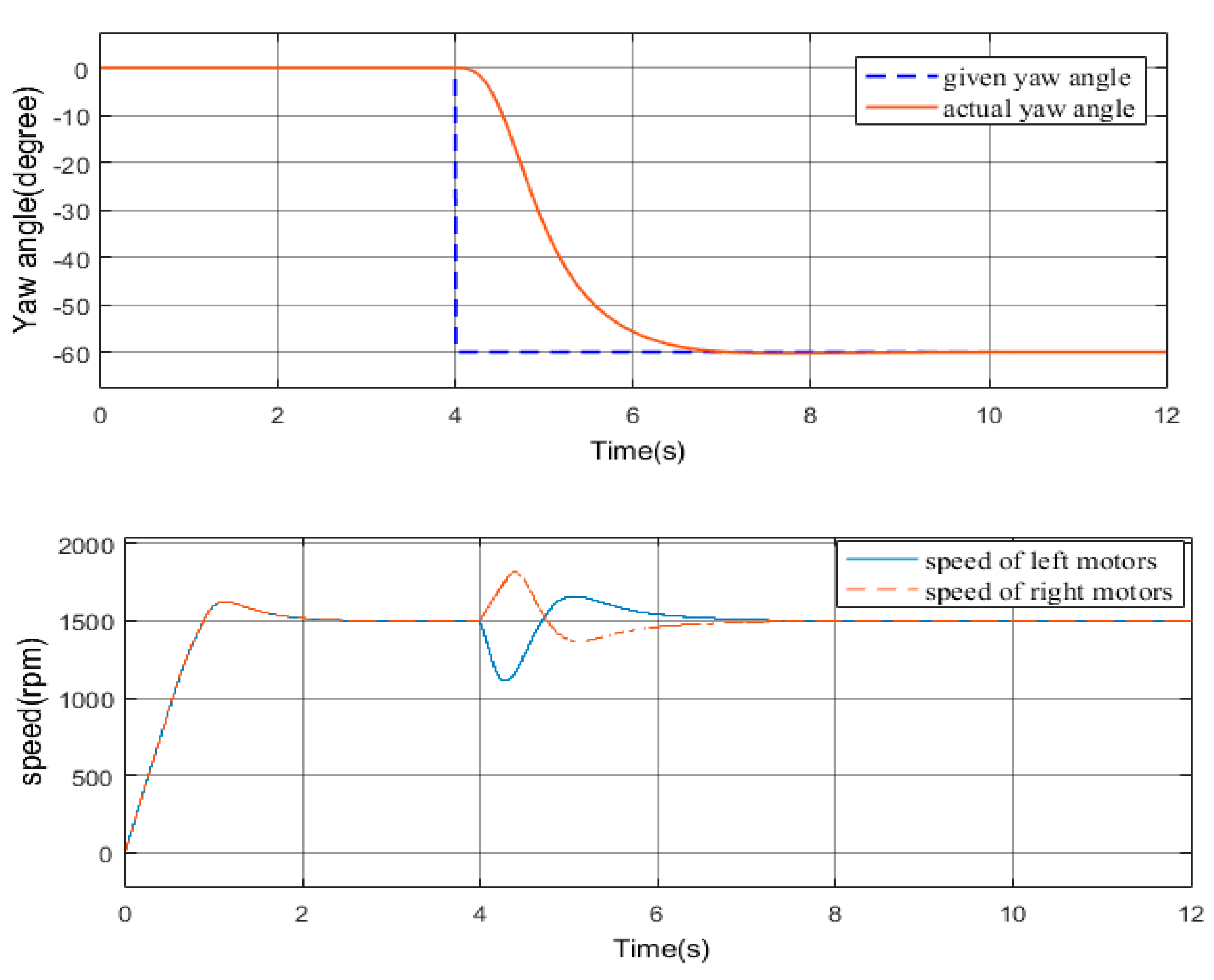
3.1.2. Simulation of Distributed Cooperative Control
3.2. Experimental Verification
3.2.1. Experiment of Synchronous Cooperative Control
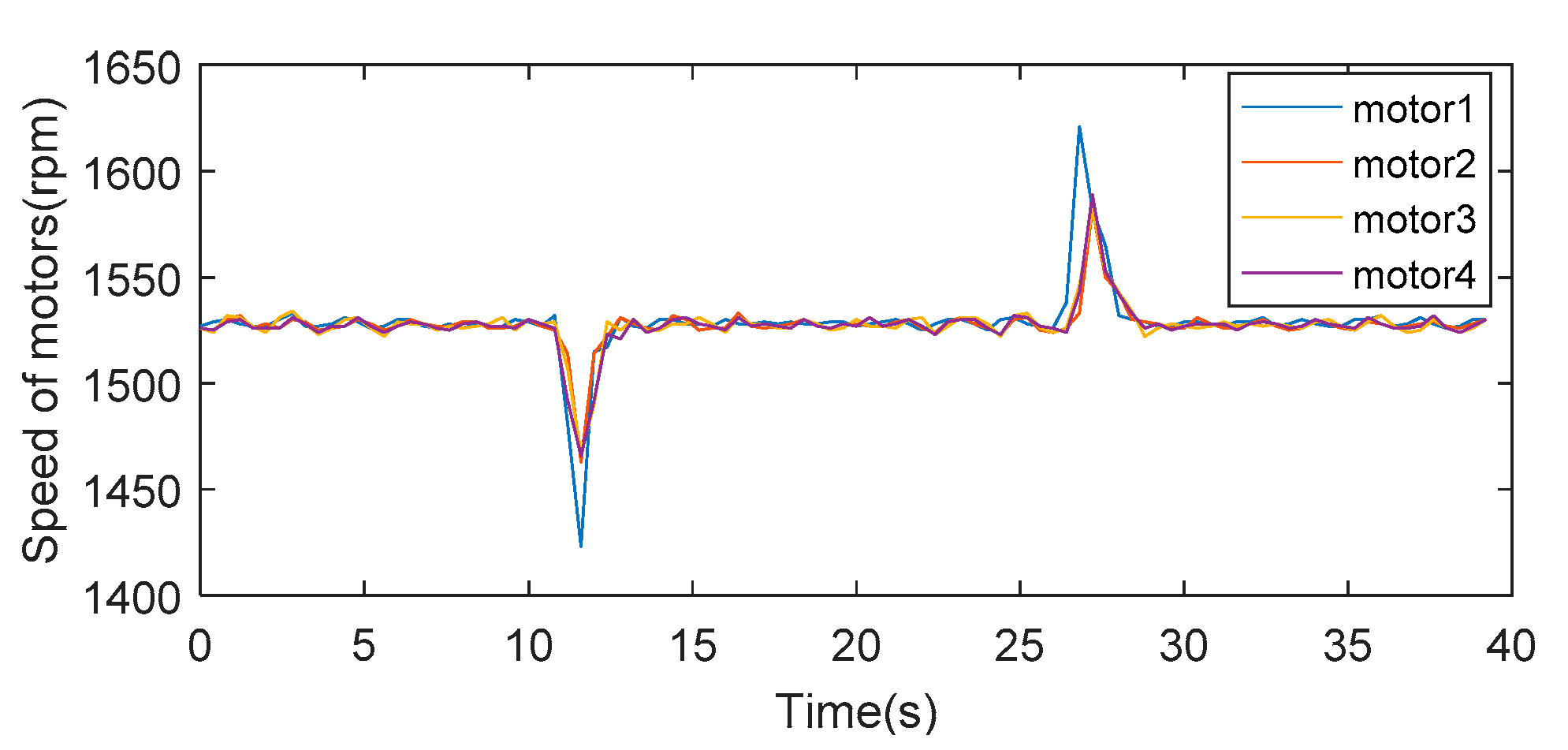
3.2.2. Experiment of Distributed Cooperative Control
4. Conclusions
- The proposed SCCS in this paper can not only be applied to the system with more than two motors, but also has stronger synchronization performance than the relative coupling control. In this way, it can ensure that the airplane will not yaw due to the inconsistency of left and right thrust when flying in a straight line.
- The proposed DCCS can make the airplane realize yaw control without relying on ailerons or vectoring nozzles, but by adjusting the speeds of motors on both sides. Thus, the mechanical structure of the airplane is simplified.
- The combination of the two control strategies can realize the straight-line flight and yaw control of the airplane.
Author Contributions
Funding
Conflicts of Interest
References
- Karen, D.; Pj, N.; Catherine, J.; Stuart, G. A review of turboelectric distributed propulsion technologies for N+3 aircraft electrical systems. In Proceedings of the 48th International Universities’ Power Engineering Conference (UPEC), Dublin, Ireland, 2–5 September 2013. [Google Scholar] [CrossRef] [Green Version]
- Hyun, D.K.; James, L.F.; Michael, T.T. Turboelectric distributed propulsion benefits on the N3-X vehicle. Aircr. Eng. Aerosp. Technol. 2014, 86, 558–561. [Google Scholar]
- Yang, X.; Li, W.; Wang, Y. Research on Aerodynamic Shape Design Scheme of a Distributed Propeller Transport Aircraft and Its Slipstream Effect. J. Northwestern Polytech. Univ. 2019, 37, 361–368. [Google Scholar] [CrossRef]
- Van, E.N.; Alazard, D.; Dll, C. Co-design of aircraft vertical tail and control laws with distributed electric propulsion and flight envelop constraints. CEAS Aeronaut. J. 2021, 12, 101–113. [Google Scholar]
- Perry, A.T.; Ansell, P.J.; Kerho, M. Aero-Propulsive and Propulsor Cross-Coupling Effects on a Distributed Propulsion System. In Proceedings of the 2018 AIAA Aerospace Sciences Meeting, Kissimmee, FL, USA, 8–12 January 2018. [Google Scholar]
- Moore, M.D.; Fredericks, B. Misconceptions of Electric Propulsion Aircraft and Their Emergent Aviation Markets. 52nd Aerospace Sciences Meeting; AIAA: National Harbor, MD, USA, 2014. [Google Scholar]
- Jun, H.; Yang, F. Development and challenges of electric aircraft with new energies. Acta Aeronaut. Astronaut. Sin. 2016, 37, 57–68. [Google Scholar]
- Fang, H.; Wang, C. Cross-coupling synchronous control of dual-motor networked motion control system. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017. [Google Scholar]
- Wang, P. The Immune Single Neuron PID Synchronization Control Based on Relative Coupling. J. Chang. Inst. Technol. 2018, 19, 30–34. [Google Scholar]
- Qu, X.; Zhang, W.; Shi, J. A novel yaw control method for flying-wing aircraft in low speed regime. Aerosp. Sci. Technol. 2017, 69, 636–649. [Google Scholar] [CrossRef]
- Wang, K.; Zhou, Z.; Fan, Z. Aerodynamic design of tractor propeller for high-performance distributed electric propulsion aircraft. Chin. J. Aeronaut. 2021, 34, 20–35. [Google Scholar] [CrossRef]
- Pelz, P.F.; Leise, P.; Meck, M. Sustainable aircraft design—A review on optimization methods for electric propulsion with derived optimal number of propulsors. Prog. Aerosp. Sci. 2021, 100714. [Google Scholar] [CrossRef]
- Berg, F.; Palmer, J.; Miller, P. HTS electric system for a distributed propulsion aircraft. IEEE Trans. Appl. Supercond. 2015, 25, 1–5. [Google Scholar] [CrossRef]
- Loureiro, E.V.; Oliveira, N.L.; Hallak, P.H. Evaluation of low fidelity and CFD methods for the aerodynamic performance of a small propeller. Aerosp. Sci. Technol. 2021, 108, 106402. [Google Scholar] [CrossRef]
- Tingna, S.; Hao, L.; Qiang, G. An improved relative coupling control structure for multi-motor speed synchronous driving system. IET Electr. Power Appl. 2016, 10, 451–457. [Google Scholar]
- Li, C.; Wang, C.; Pan, J. Improved Relative Coupling Control with Second-Order Consensus Compensation for Multi-PMSMs. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019. [Google Scholar]
- Miao, X.; Wang, S.; Han, L. Single Neuron PID Synchronization Control Strategy in Multi-motor Systems Based on the Relative Coupling Control. Micromotors 2020, 42, 44–47. [Google Scholar]
- Nicholas, J.C. Pathfinder and the Development of Solar Rechargeable Aircraft; Carnegie Mellon University: Pittsburgh, PA, USA, 2002. [Google Scholar]
- Fang, Z. Aircraft Flight Dynamics; Beijing University of Aeronautics and Astronautics Press: Beijing, China, 2005; ISBN 978-7-8107-7670-7. [Google Scholar]
- Jones, C.E.; Norman, P.J.; Galloway, S.J. Comparison of candidate architectures for future distributed propulsion aircraft. IEEE Trans. Appl. Supercond. 2016, 26, 5202705. [Google Scholar] [CrossRef] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variables | Definitions |
|---|---|
| given speed of all motors | |
| actual speed of motor i | |
| given speed after compensation of motor i | |
| Δn | output value of yaw angle controller |
| Δ | compensation speed of motor i output by the speed distributor |
| nerm | maximum speed synchronization error |
| speed compensator output of motor i | |
| improved speed compensator output of motor i | |
| TLi | load torque of motor i |
| acceleration of motor i | |
| λi | speed proportional factor of motor i |
| kij | feedback gain coefficient |
| moment of inertia of motor i | |
| kv | velocity compensation coefficient |
| ka | acceleration compensation coefficient |
| steering angular velocity of the aircraft | |
| steering moment of inertia of the aircraft | |
| M | yaw moment of the aircraft |
| * | given yaw angle |
| actual yaw angle | |
| Fi | thrust output of propeller i |
| Parameters | Values |
|---|---|
| bus voltage | 270 V |
| rated speed of motors | 2000 rpm |
| rated power of motors | 15 kW |
| flux linkage of permanent magnet | 0.1225 Wb |
| quadrature axis inductance | 0.8 mH |
| direct axis inductance | 0.8 mH |
| moment of inertia of propulsion motors | 0.008 kg∙m2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Weng, L.; Zhang, X.; Yao, T.; Bu, F.; Li, H. A Thrust Cooperative Control Strategy of Multiple Propulsion Motors for Distributed Electric Propulsion Aircraft. World Electr. Veh. J. 2021, 12, 199. https://doi.org/10.3390/wevj12040199
Weng L, Zhang X, Yao T, Bu F, Li H. A Thrust Cooperative Control Strategy of Multiple Propulsion Motors for Distributed Electric Propulsion Aircraft. World Electric Vehicle Journal. 2021; 12(4):199. https://doi.org/10.3390/wevj12040199
Chicago/Turabian StyleWeng, Luhui, Xuan Zhang, Taike Yao, Feifei Bu, and Hang Li. 2021. "A Thrust Cooperative Control Strategy of Multiple Propulsion Motors for Distributed Electric Propulsion Aircraft" World Electric Vehicle Journal 12, no. 4: 199. https://doi.org/10.3390/wevj12040199
APA StyleWeng, L., Zhang, X., Yao, T., Bu, F., & Li, H. (2021). A Thrust Cooperative Control Strategy of Multiple Propulsion Motors for Distributed Electric Propulsion Aircraft. World Electric Vehicle Journal, 12(4), 199. https://doi.org/10.3390/wevj12040199