
Research on Cooperative Braking Control Algorithm Based on Nonlinear Model Prediction



Abstract
:1. Introduction
2. Cooperative Braking Control Algorithm Based on NMPC
2.1. Overview of NMPC
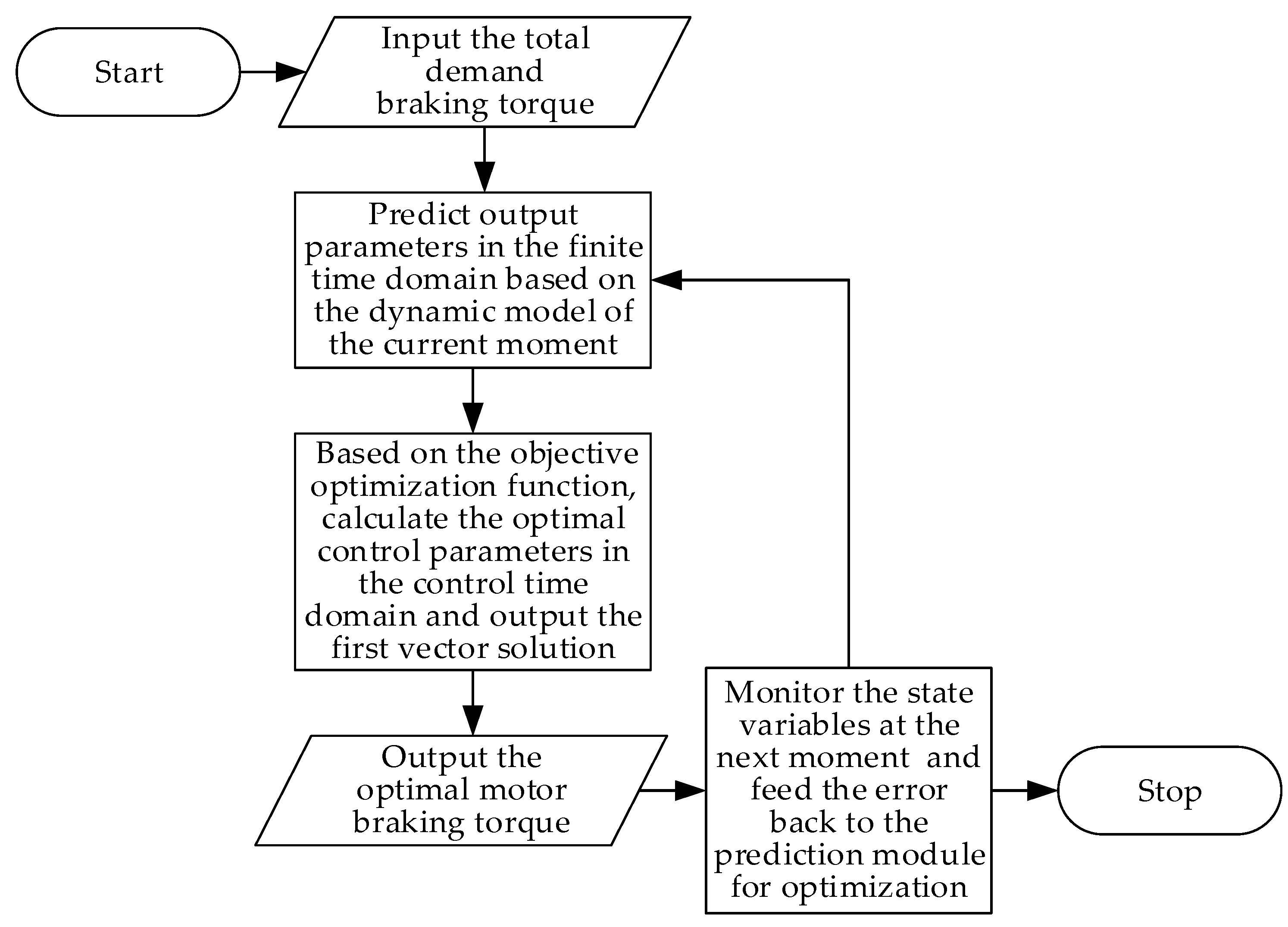
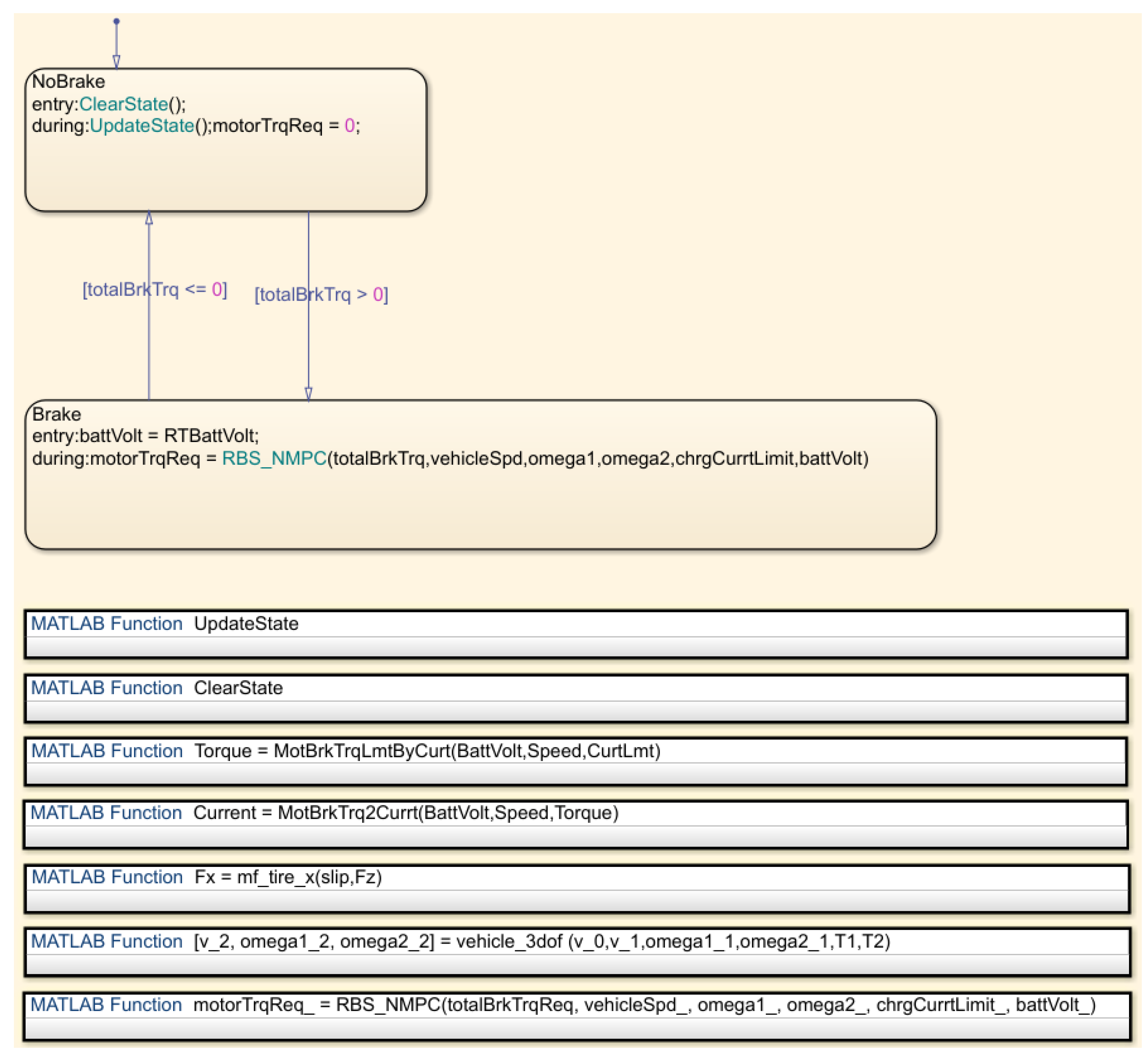
2.2. The Implementation Method of NMPC
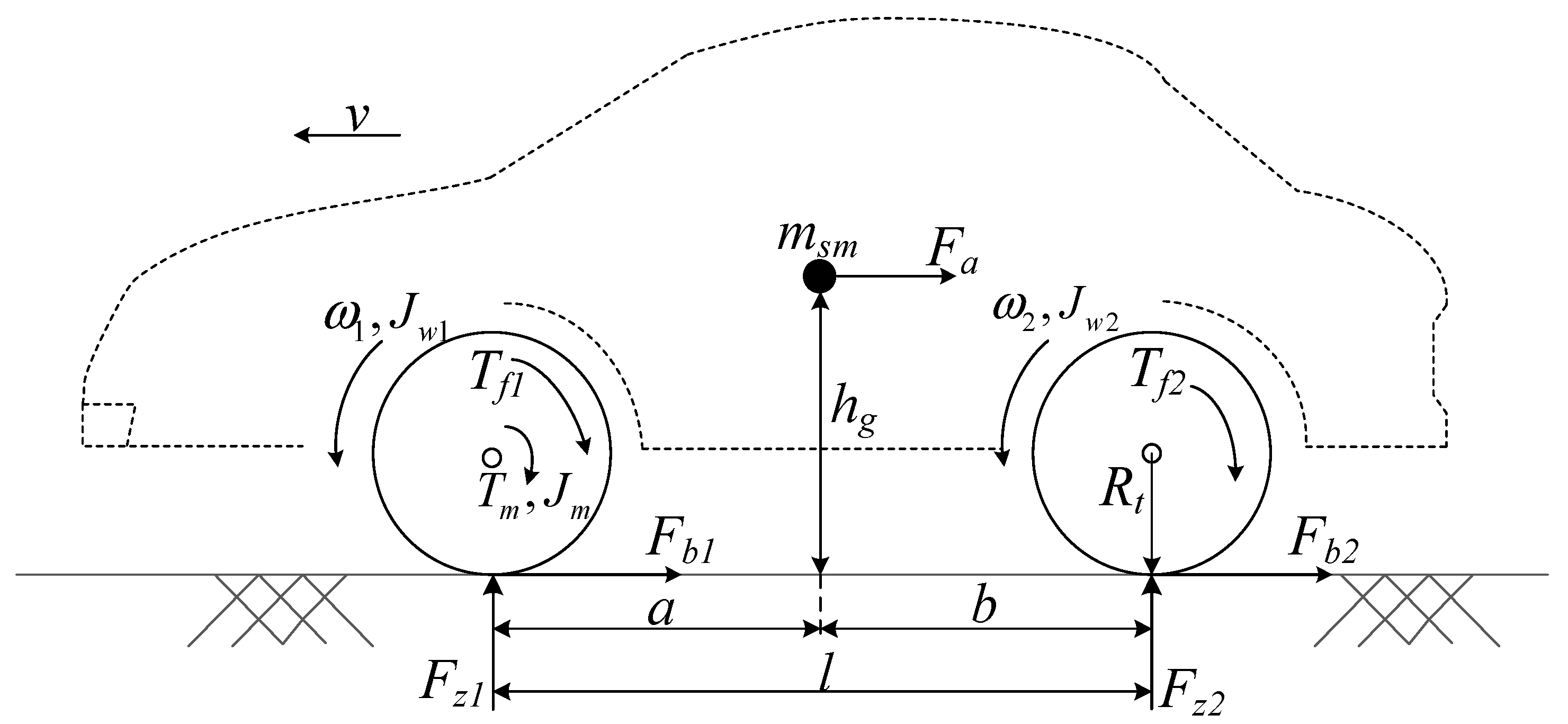
2.3. Build Predictive Model
2.4. Design Optimization Objective Function
2.5. Design Constraints
3. Simulation Verification Based on Matlab/Simulink
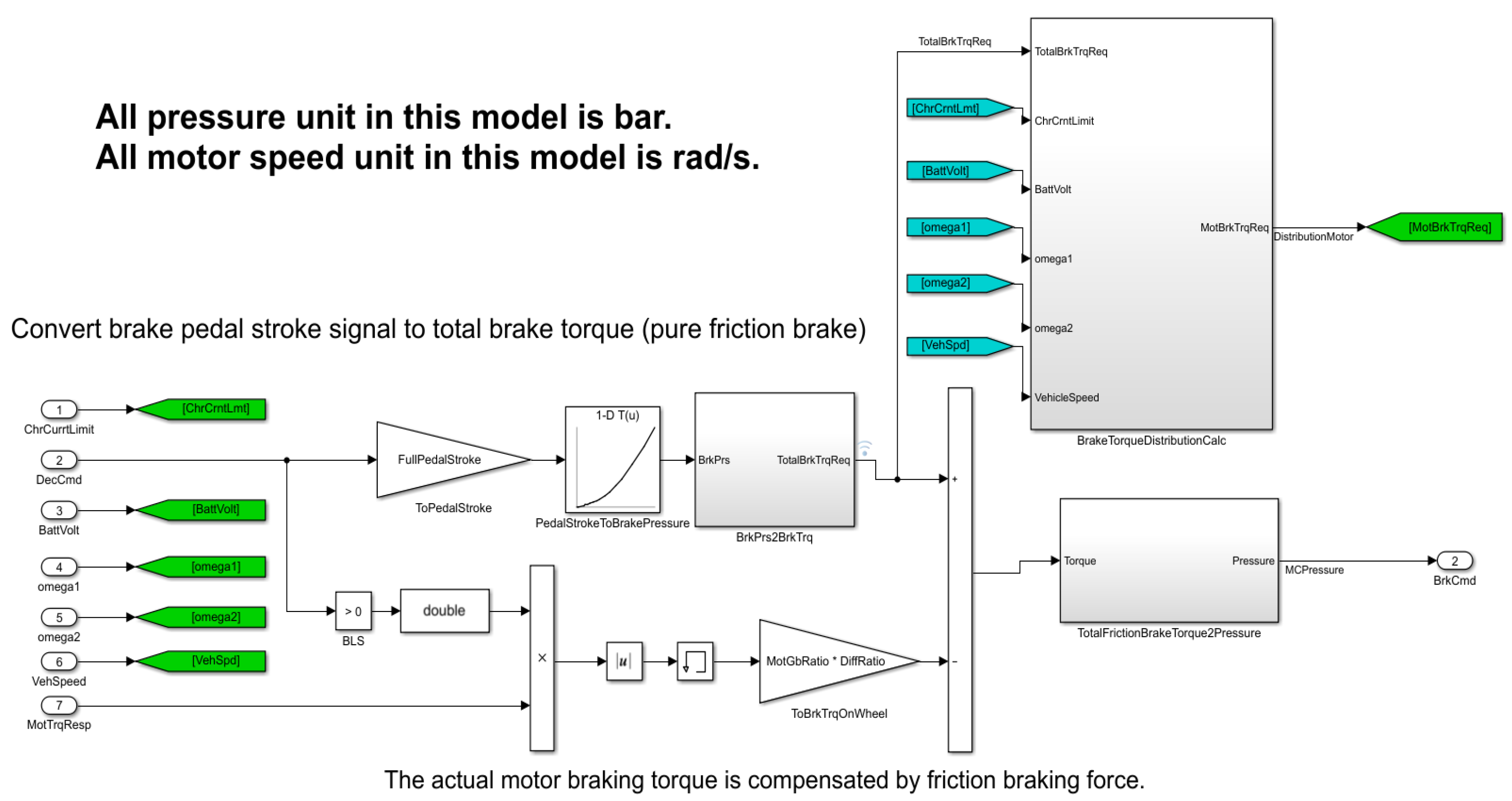
3.1. Build Simulation Model
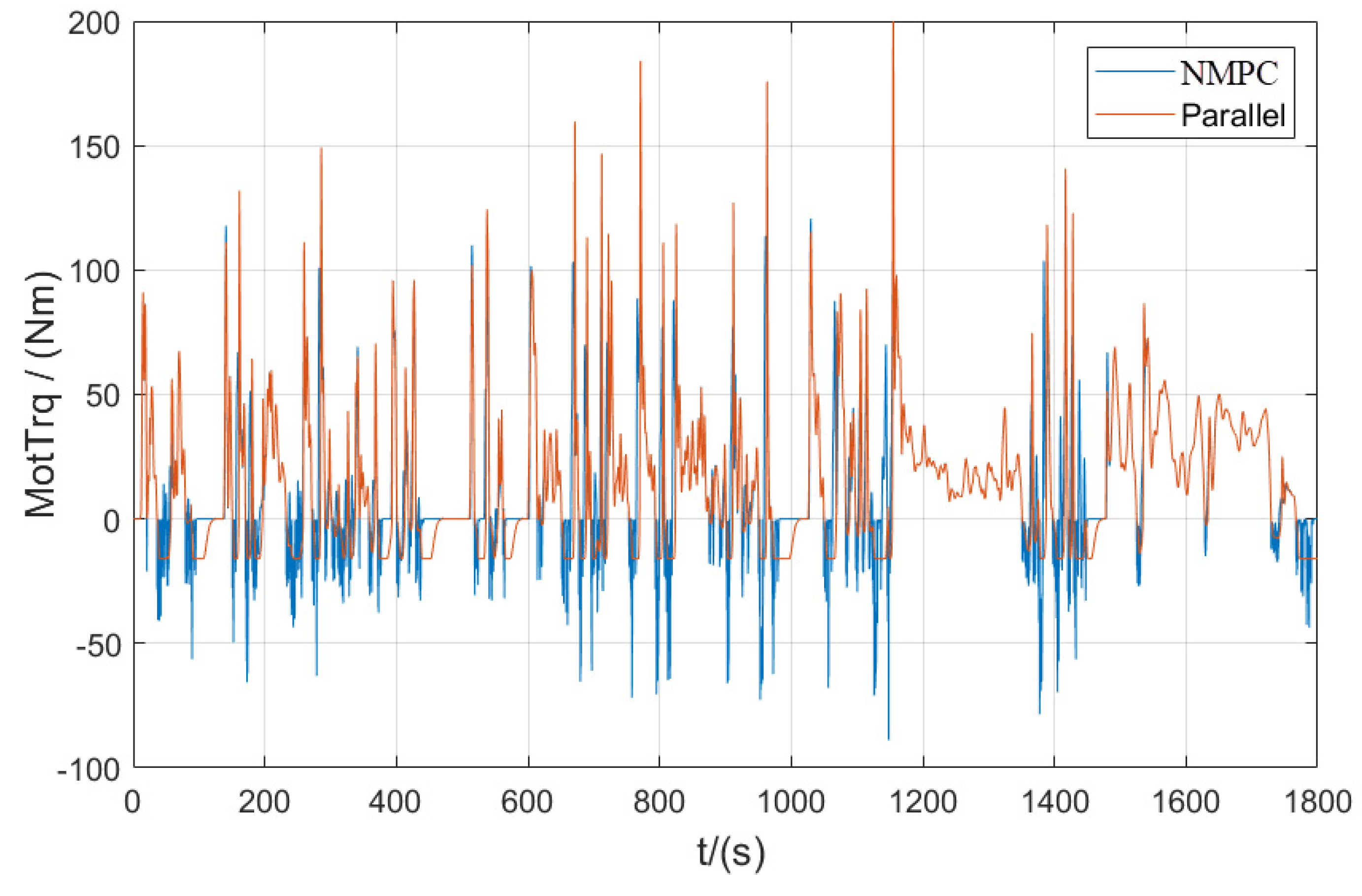
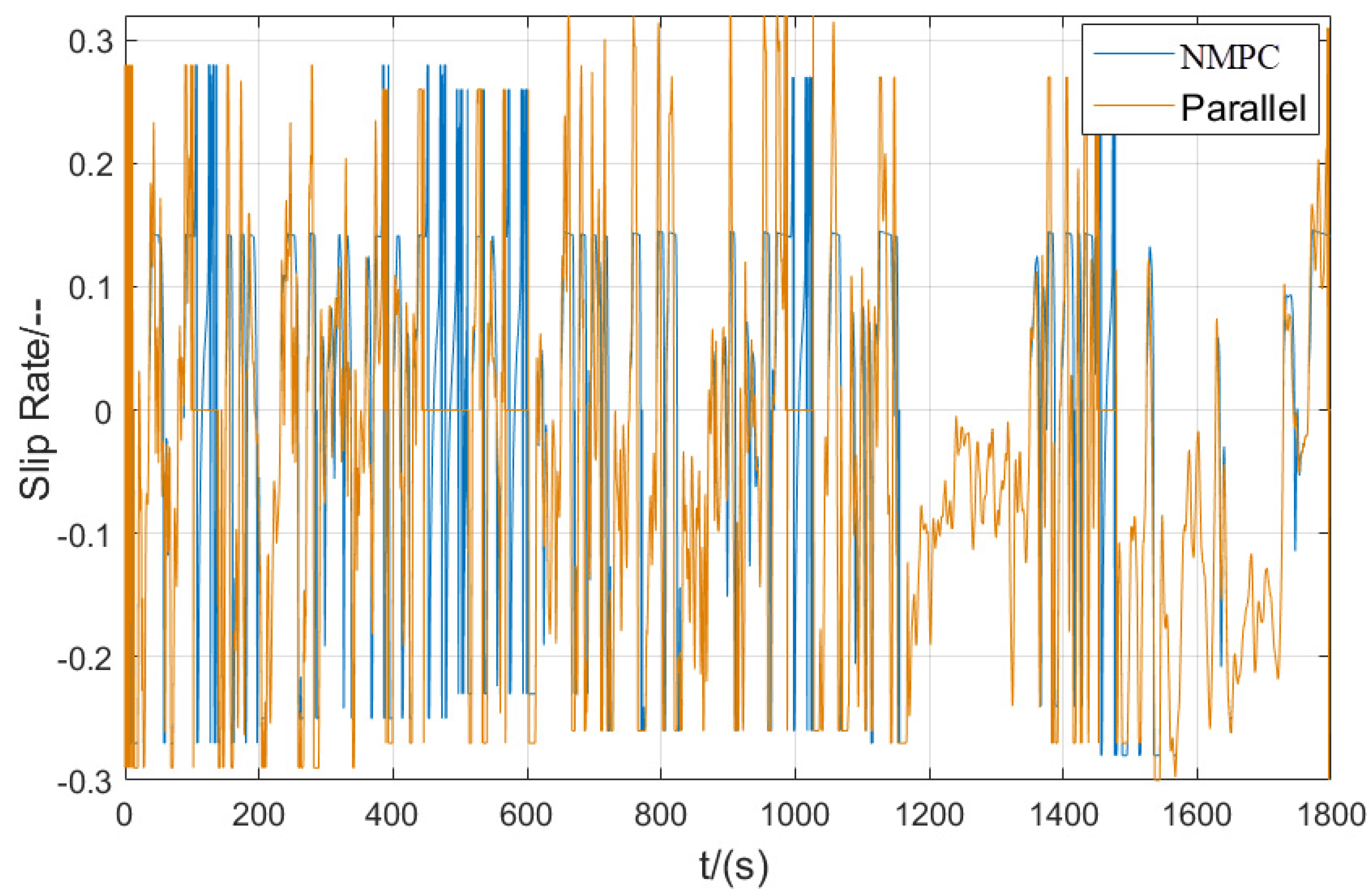
3.2. Simulation and Result Analysis Based on WLTC
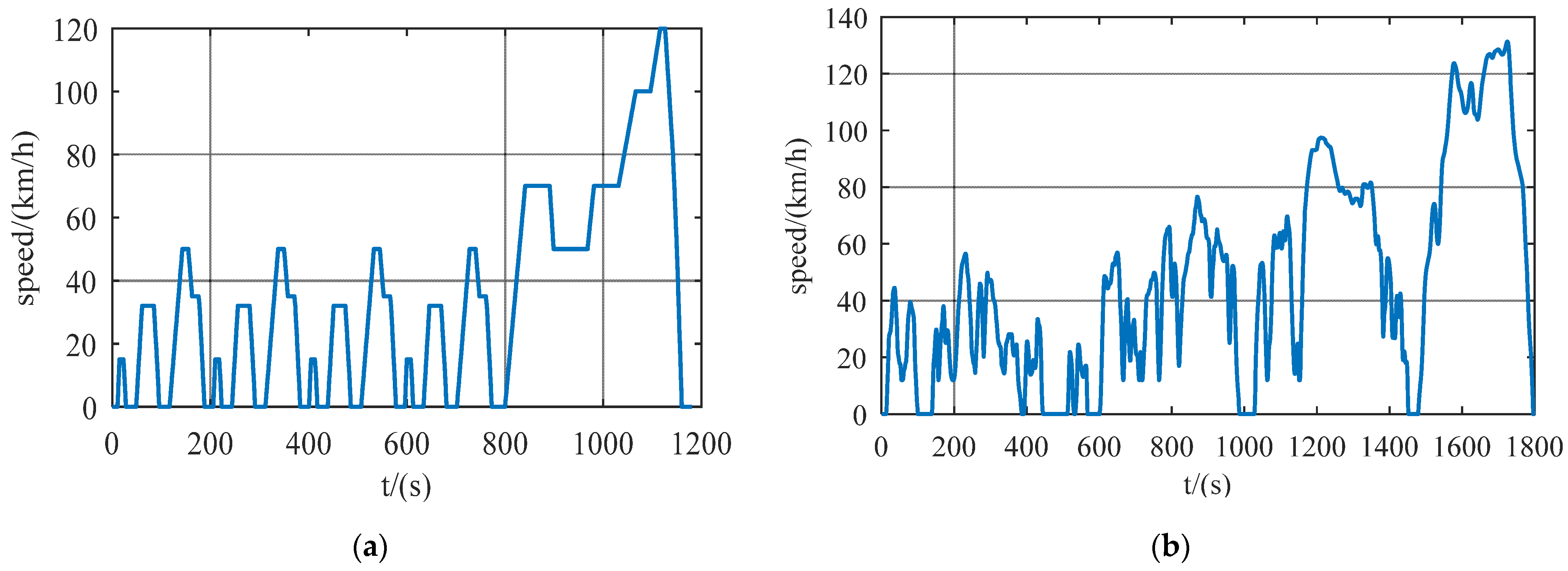
3.2.1. Select Driving Cycle
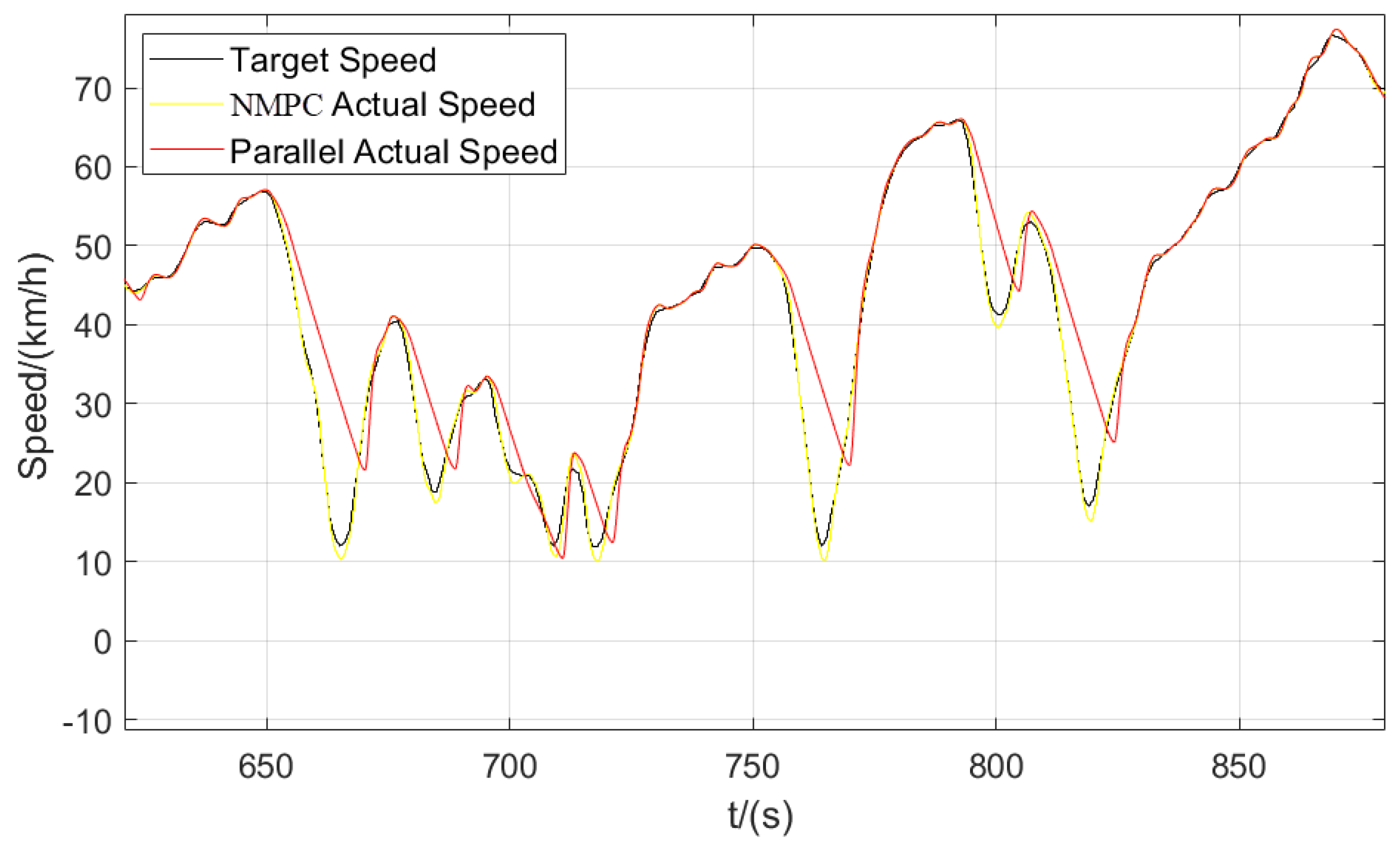
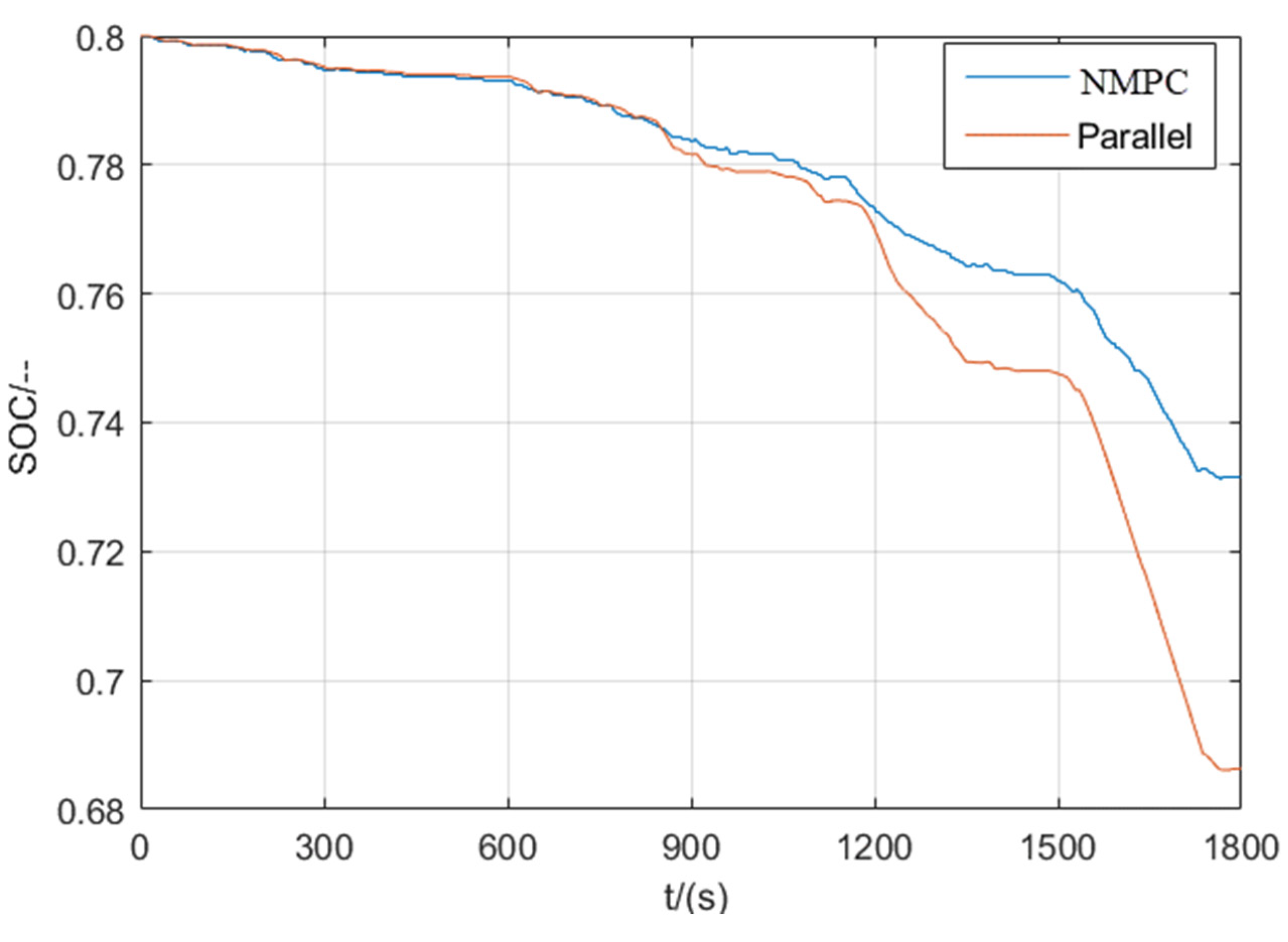
3.2.2. Simulation and Result Analysis
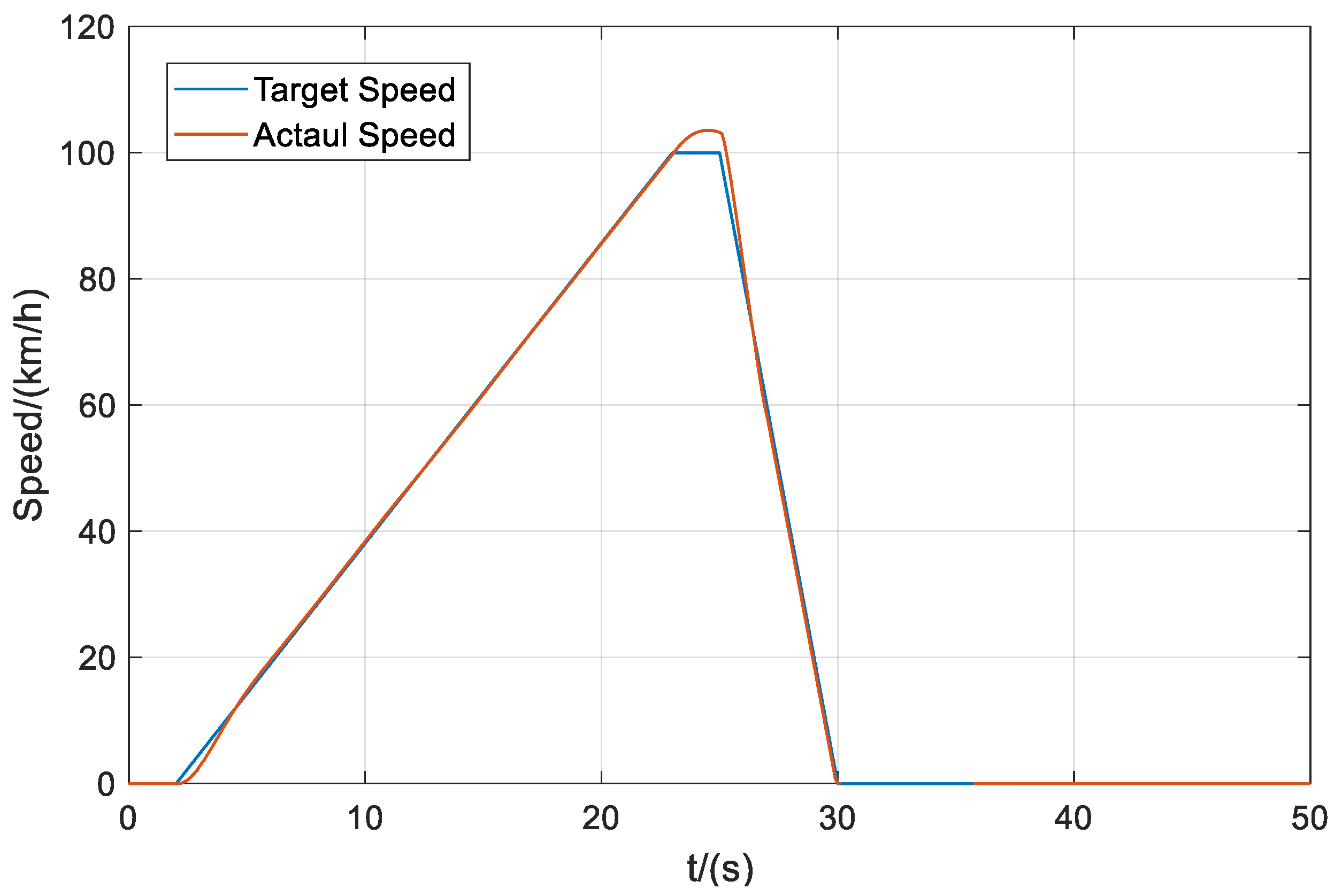
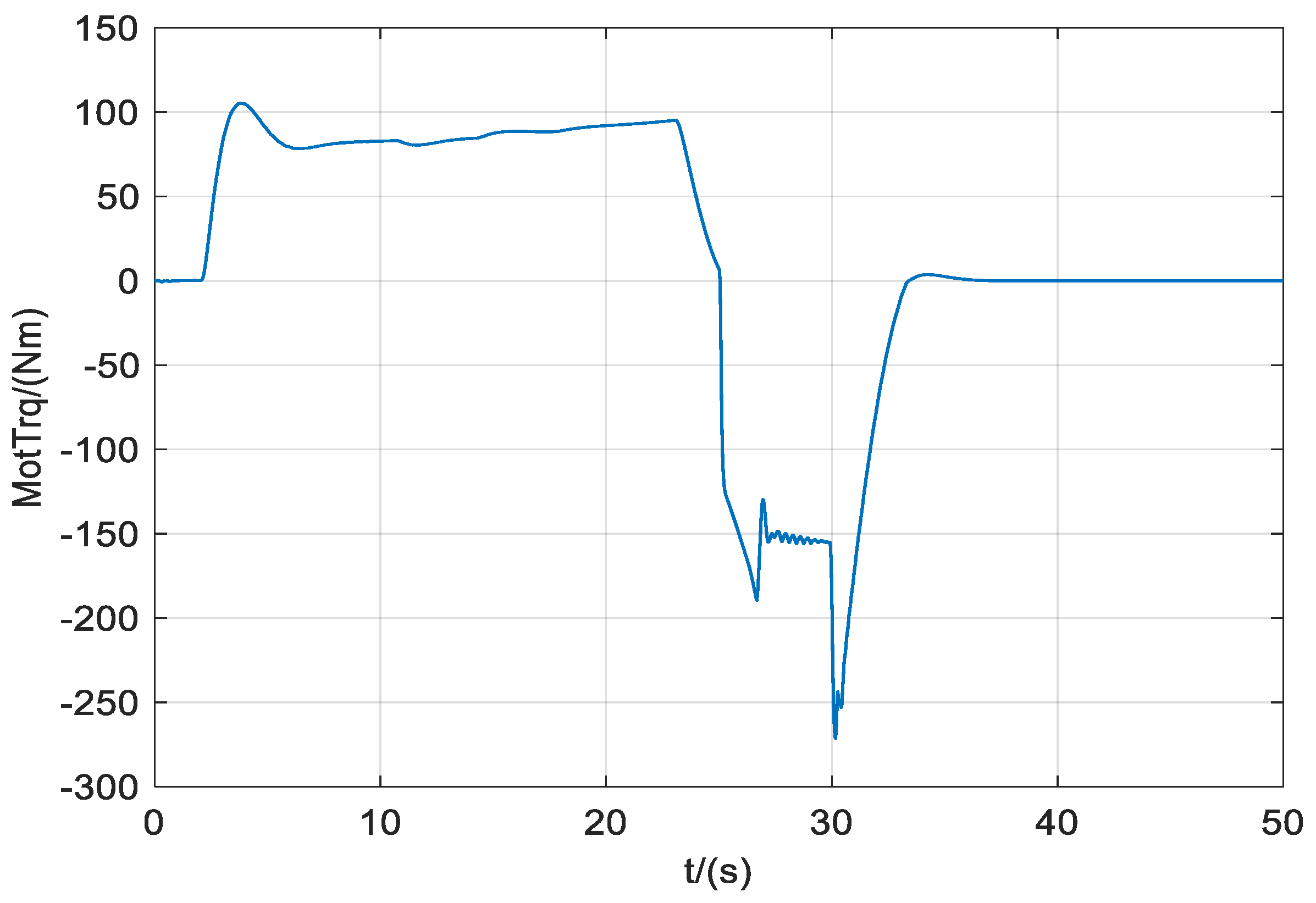
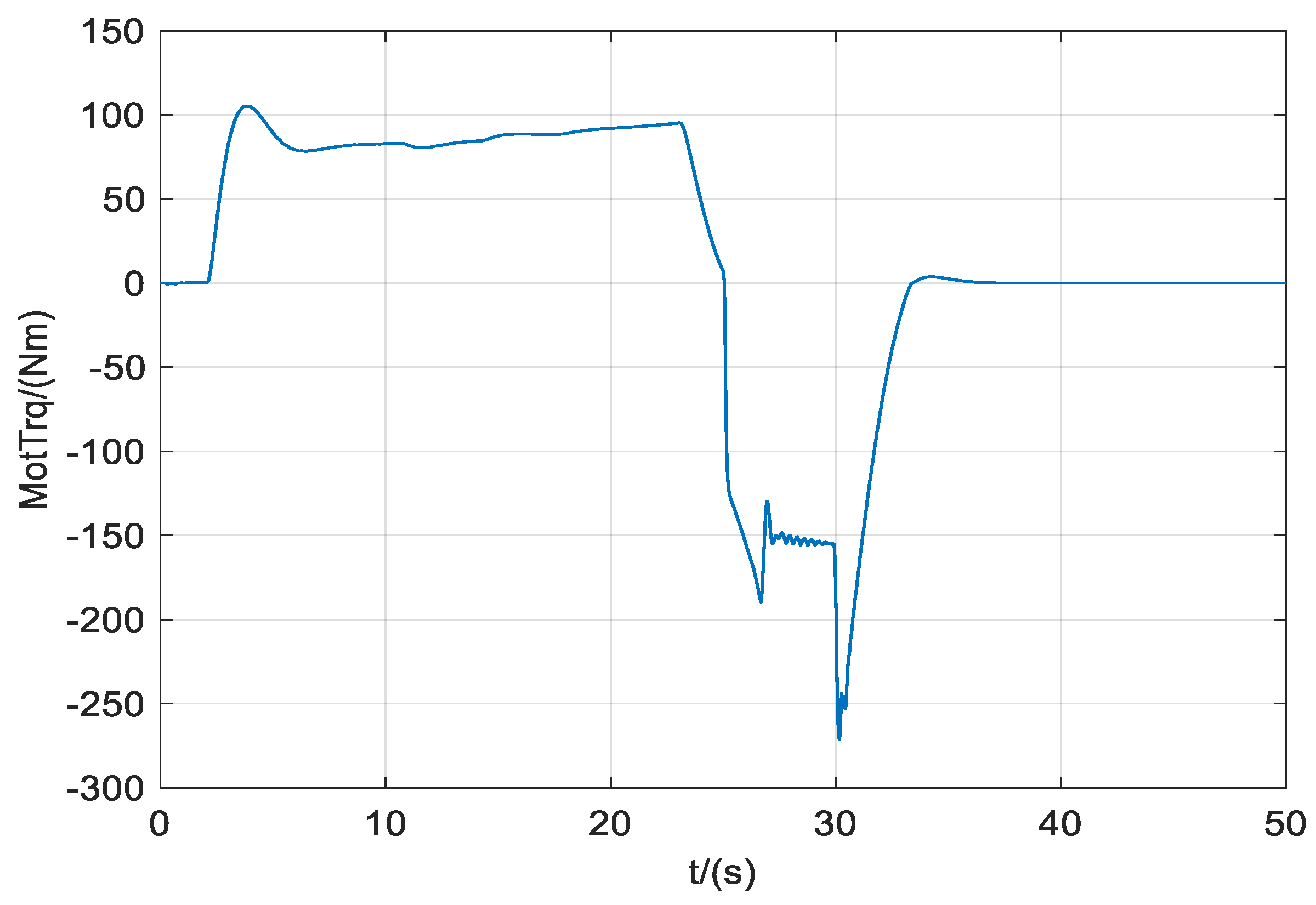
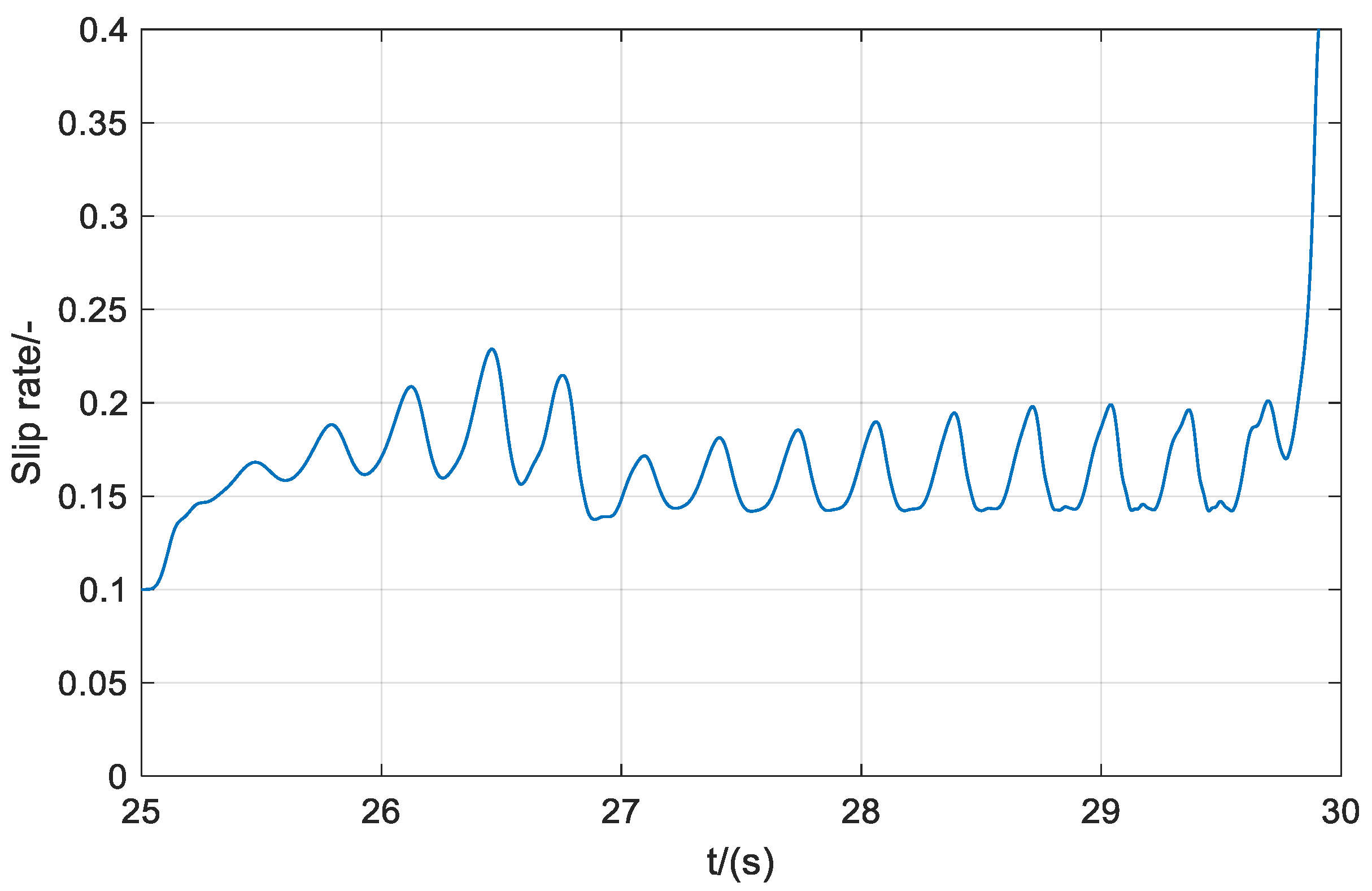
3.3. Simulation and Result Analysis Based on Single Braking Condition
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Line, C.; Manzie, C.; Good, M.C. Electromechanical Brake Modeling and Control: From PI to MPC. IEEE Trans. Control Syst. Technol. 2008, 16, 446–457. [Google Scholar] [CrossRef]
- Satzger, C.; De Castro, R. Predictive Brake Control for Electric Vehicles. IEEE Trans. Veh. Technol. 2017, 67, 977–990. [Google Scholar] [CrossRef]
- Lu, X.-Y.; Wang, J.; Li, S.E.; Zheng, Y. Multiple-Vehicle Longitudinal Collision Mitigation by Coordinated Brake Control. Math. Probl. Eng. 2014, 2014, 1–13. [Google Scholar] [CrossRef]
- Tavernini, D.; Velenis, E.; Longo, S. Feedback brake distribution control for minimum pitch. Veh. Syst. Dyn. 2017, 55, 902–923. [Google Scholar] [CrossRef] [Green Version]
- Cheng, S.; Li, L.; Guo, H.-Q.; Chen, Z.-G.; Song, P. Longitudinal Collision Avoidance and Lateral Stability Adaptive Control System Based on MPC of Autonomous Vehicles. IEEE Trans. Intell. Transp. Syst. 2019, 21, 2376–2385. [Google Scholar] [CrossRef]
- Sardarmehni, T.; Rahmani, H.; Menhaj, M.B. Robust control of wheel slip in anti-lock brake system of automobiles. Nonlinear Dyn. 2013, 76, 125–138. [Google Scholar] [CrossRef]
- Nadeau, J.; Micheau, P.; Boisvert, M. Model-Based Predictive Control Applied to a Dual Regenerative and Hydraulic Brake System. In Proceedings of the 2015 IEEE Vehicle Power and Propulsion Conference (VPPC), Montreal, QC, Canada, 19–22 October 2015; pp. 1–5. [Google Scholar]
- Yao, M.; Miao, J.; Cao, S.; Chen, S.; Chai, H. The Structure Design and Optimization of Electromagnetic-Mechanical Wedge Brake System. IEEE Access 2019, 8, 3996–4004. [Google Scholar] [CrossRef]
- Ma, K.; Wang, Z.; Liu, H.; Yu, H.; Wei, C. Numerical Investigation on Fuzzy Logic Control Energy Management Strategy of Parallel Hybrid Electric Vehicle. Energy Procedia 2019, 158, 2643–2648. [Google Scholar] [CrossRef]
- Zhao, D.; Chu, L.; Xu, N.; Sun, C.; Xu, Y. Development of a Cooperative Braking System for Front-Wheel Drive Electric Vehicles. Energies 2018, 11, 378. [Google Scholar] [CrossRef] [Green Version]
- Ma, H.; Chu, L.; Guo, J.; Wang, J.; Guo, C. Cooperative Adaptive Cruise Control Strategy Optimization for Electric Vehicles Based on SA-PSO With Model Predictive Control. IEEE Access 2020, 8, 225745–225756. [Google Scholar] [CrossRef]
- Ma, Z.; Sun, D. Energy Recovery Strategy Based on Ideal Braking Force Distribution for Regenerative Braking System of a Four-Wheel Drive Electric Vehicle. IEEE Access 2020, 8, 136234–136242. [Google Scholar] [CrossRef]
- Ji, F.; Pan, Y.; Zhou, Y.; Du, F.; Zhang, Q.; Li, G. Energy recovery based on pedal situation for regenerative braking system of electric vehicle. Veh. Syst. Dyn. 2019, 58, 144–173. [Google Scholar] [CrossRef]
- Guo, J.; Li, W.; Wang, J.; Luo, Y.; Li, K. Safe and Energy-Efficient Car-Following Control Strategy for Intelligent Electric Vehicles Considering Regenerative Braking. IEEE Trans. Intell. Transp. Syst. 2021, 1–12. [Google Scholar] [CrossRef]
- Tao, Y.; Xie, X.; Zhao, H.; Xu, W.; Chen, H. A regenerative braking system for electric vehicle with four in-wheel motors based on fuzzy control. In Proceedings of the 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; pp. 4288–4293. [Google Scholar]
- Bravo, R.R.S.; De Negri, V.J.; Oliveira, A.A.M. Design and analysis of a parallel hydraulic—Pneumatic regenerative braking system for heavy-duty hybrid vehicles. Appl. Energy 2018, 225, 60–77. [Google Scholar] [CrossRef]
- Ning, X.; Shangguan, J.; Xiao, Y.; Fu, Z.; Xu, G.; He, A.; Li, B. Optimization of Energy Recovery Efficiency for Parallel Hydraulic Hybrid Power Systems Based on Dynamic Programming. Math. Probl. Eng. 2019, 2019, 1–11. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhao, C.; Li, Z. Electric Vehicle Regenerative Braking System Simulation based on Kalman Filter. In Proceedings of the 2020 Chinese Automation Congress (CAC), Shanghai, China, 6–8 November 2020; pp. 2936–2941. [Google Scholar]
- Xiao, B.; Lu, H.; Wang, H.; Ruan, J.; Zhang, N. Enhanced Regenerative Braking Strategies for Electric Vehicles: Dynamic Performance and Potential Analysis. Energies 2017, 10, 1875. [Google Scholar] [CrossRef] [Green Version]
- Xu, W.; Chen, H.; Zhao, H.; Ren, B. Torque optimization control for electric vehicles with four in-wheel motors equipped with regenerative braking system. Mechatronics 2018, 57, 95–108. [Google Scholar] [CrossRef]
- Zhang, L.; Cai, X. Control strategy of regenerative braking system in electric vehicles. Energy Procedia 2018, 152, 496–501. [Google Scholar] [CrossRef]
- Xu, L.; He, X.; Shen, X. Improving Energy Recovery Rate of the Regenerative Braking System by Optimization of Influencing Factors. Appl. Sci. 2019, 9, 3807. [Google Scholar] [CrossRef] [Green Version]
- Dou, J.; Cui, G.; Li, S.; Zhao, X.; Lu, X.; Yu, Z. MPC-based cooperative braking control for rear-wheel-drive electric vehicle. In Proceedings of the 2017 Chinese Automation Congress (CAC), Jinan, China, 20–22 October 2017; pp. 4419–4424. [Google Scholar] [CrossRef]
- Li, S.; Guo, L.; Zhang, B.; Lu, X.; Cui, G.; Dou, J. MPC-based Slip Control System for In-wheel-motor Drive EV. IFAC-PapersOnLine 2018, 51, 578–582. [Google Scholar] [CrossRef]
- Wagner, D.; Steinsträter, M.; Förth, M.; Stohwasser, M.; Hoffmann, J.; Lienkamp, M. Battery independent regenerative braking using model predictive control with auxiliary power consumers. Forsch. Ing. 2019, 83, 843–852. [Google Scholar] [CrossRef]
- Chen, J.; Yu, J.; Zhang, K.; Ma, Y. Control of regenerative braking systems for four-wheel-independently-actuated electric vehicles. Mechatronics 2018, 50, 394–401. [Google Scholar] [CrossRef]
- Hao, L.; Sun, B.; Li, G.; Guo, L. The Eco-Driving Considering Coordinated Control Strategy for the Intelligent Electric Vehicles. IEEE Access 2021, 9, 10686–10698. [Google Scholar] [CrossRef]
- Farooqi, H.; Incremona, G.P.; Colaneri, P. Collaborative Eco-Drive of Railway Vehicles via Switched Nonlinear Model Predictive Control. IFAC-PapersOnLine 2018, 51, 626–631. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, X.; Sun, Y.; You, S. Model predictive control strategy for energy optimization of series-parallel hybrid electric vehicle. J. Clean. Prod. 2018, 199, 348–358. [Google Scholar] [CrossRef]
- Zhang, Y.; Bai, Y.; Yang, H. A Universal Multiple-Vector-Based Model Predictive Control of Induction Motor Drives. IEEE Trans. Power Electron. 2017, 33, 6957–6969. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| 1928 | ||
| 2675 | ||
| 1263 | ||
| 1412 | ||
| 530 | ||
| 1.12 | ||
| 5.34 | ||
| 0.308 | ||
| 8.28 | -- |
| 3474 | 11,417 | 30.4% |
| 2401 | 11,395 | 21.1% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chu, L.; Chang, C.; Zhao, D.; Xu, Y. Research on Cooperative Braking Control Algorithm Based on Nonlinear Model Prediction. World Electr. Veh. J. 2021, 12, 173. https://doi.org/10.3390/wevj12040173
Chu L, Chang C, Zhao D, Xu Y. Research on Cooperative Braking Control Algorithm Based on Nonlinear Model Prediction. World Electric Vehicle Journal. 2021; 12(4):173. https://doi.org/10.3390/wevj12040173
Chicago/Turabian StyleChu, Liang, Cheng Chang, Di Zhao, and Yanwu Xu. 2021. "Research on Cooperative Braking Control Algorithm Based on Nonlinear Model Prediction" World Electric Vehicle Journal 12, no. 4: 173. https://doi.org/10.3390/wevj12040173
APA StyleChu, L., Chang, C., Zhao, D., & Xu, Y. (2021). Research on Cooperative Braking Control Algorithm Based on Nonlinear Model Prediction. World Electric Vehicle Journal, 12(4), 173. https://doi.org/10.3390/wevj12040173