
Observation of Dynamic State Parameters and Yaw Stability Control of Four-Wheel-Independent-Drive EV


Abstract
:1. Introduction
2. System Modeling
2.1. Dynamic Model Establishment
2.2. Design of Unscented Kalman Filtering Algorithm
2.3. Design of Yaw Stability Control
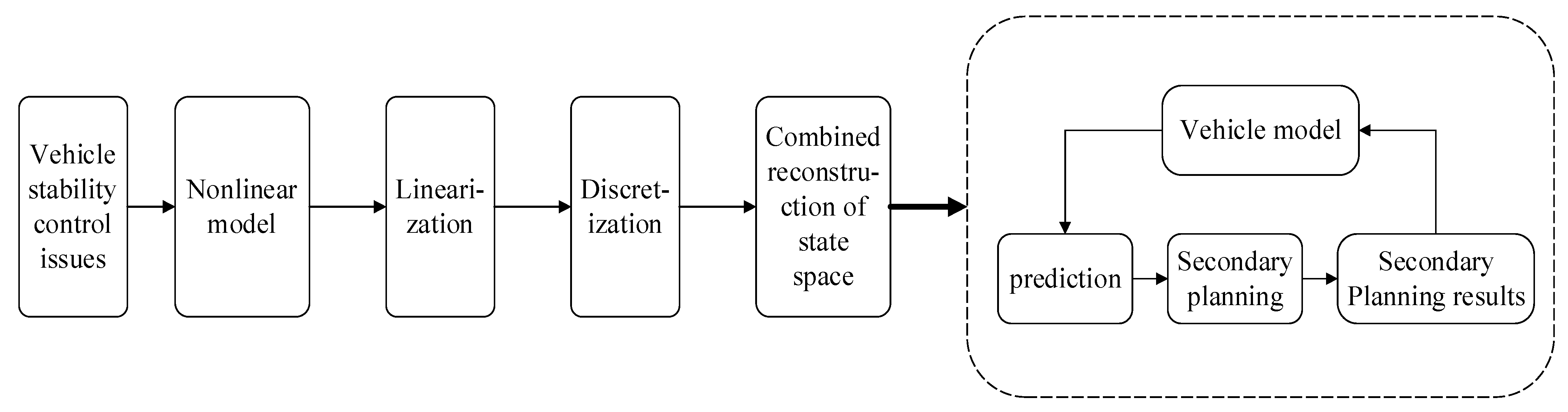
2.3.1. Model Control Prediction Algorithm Design
2.3.2. The Main Steps of Model Predictive Controller Design
- (1)
- The establishment of the model.
- (2)
- Linearize the dynamic model.
- (3)
- Set the system objective function.
- (4)
- Predict, solve, and feedback control of the system.
- (5)
- Quadratic programming solution
- (6)
- Lateral following ability test
3. Design of Yaw Moment Controller
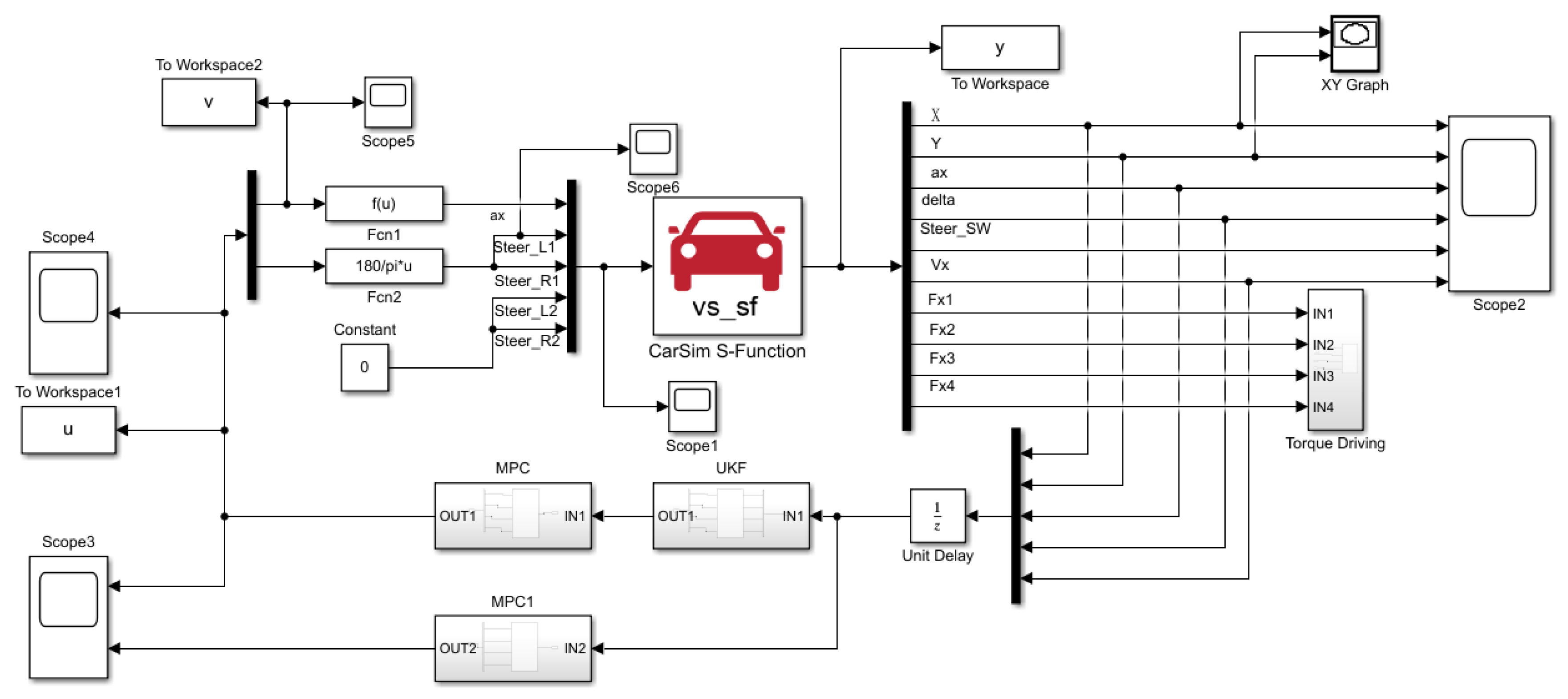
3.1. Overall Structure Design of Simulation Platform
3.2. Simulation Verification of Yaw Stability
- (1)
- Simulation of double-lane change test
- (2)
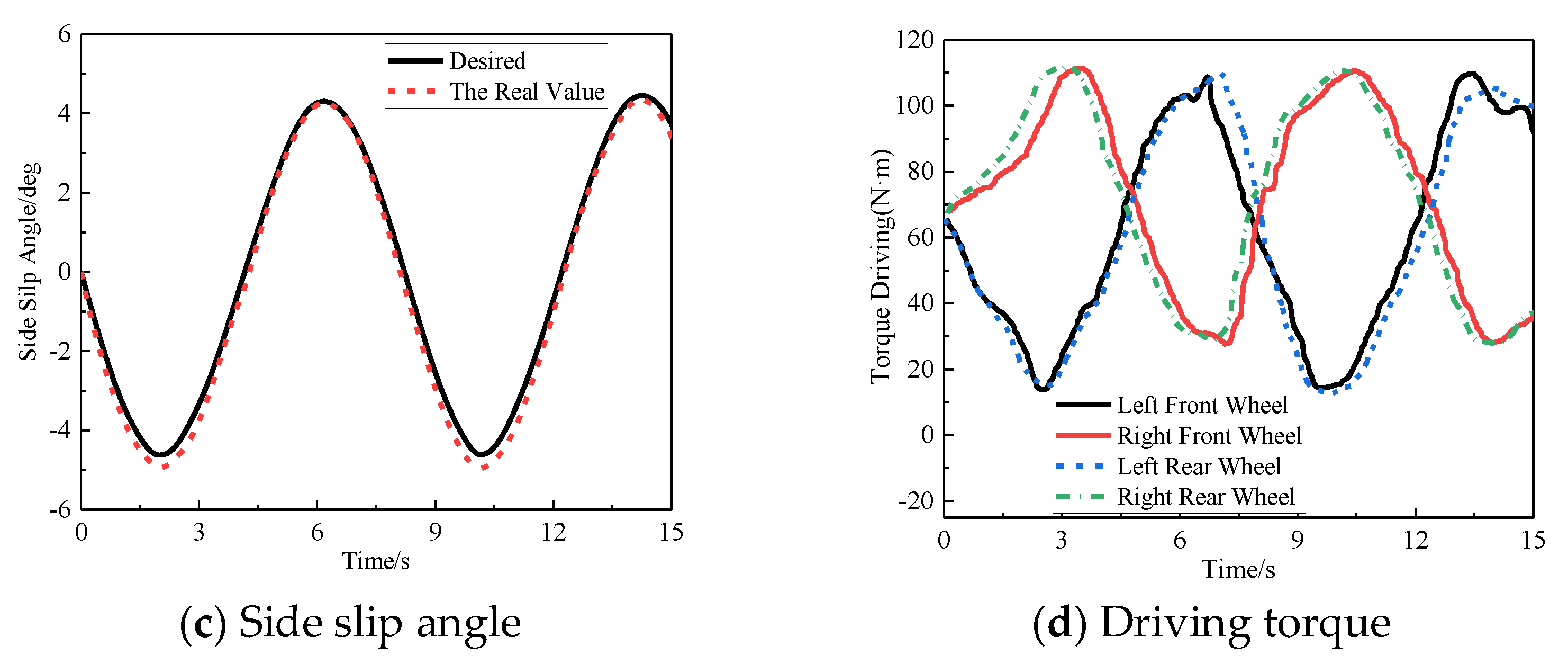
- Simulation of snake test
3.3. HIL Experiment
4. Conclusions
- (1)
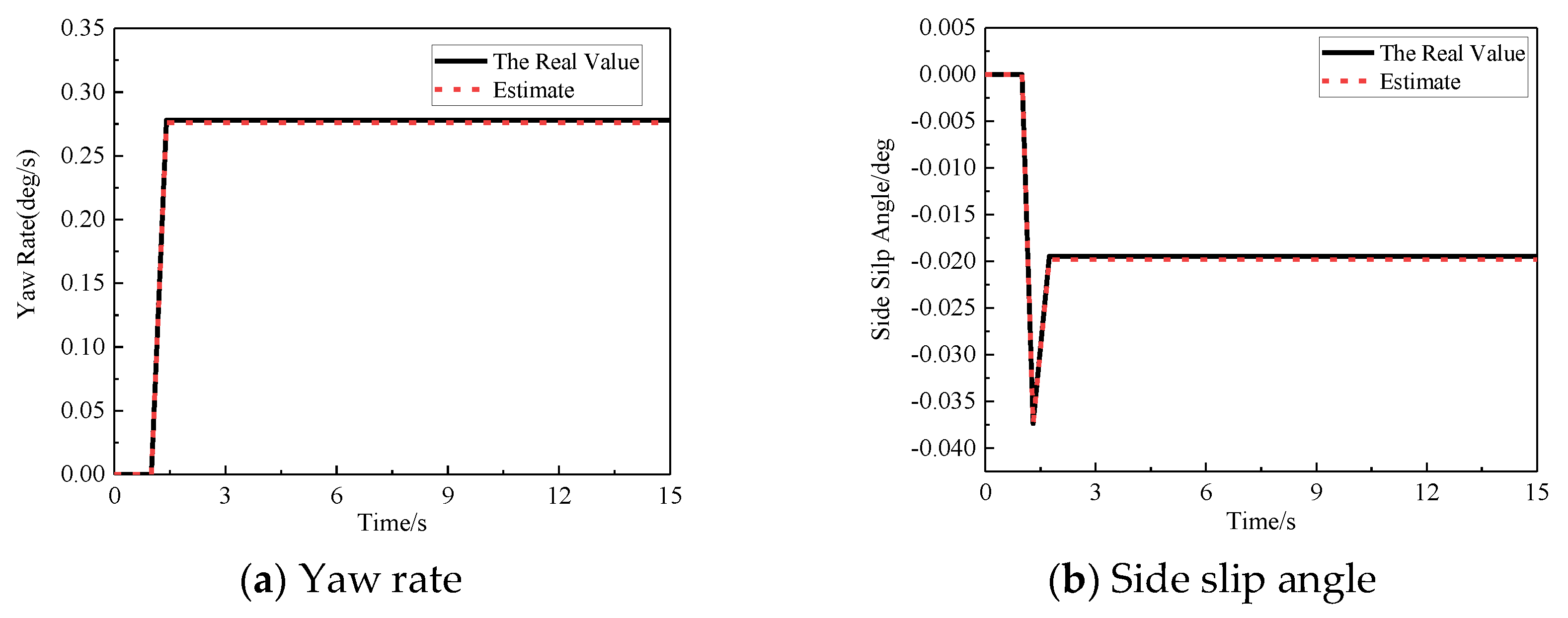
- Based on the HIL simulation platform of the vehicle state parameter, the estimation algorithm is verified, and the simulation results show that the Kalman estimation algorithm under the steering wheel angle step input yawing angular velocity of the average estimated error was 0.5 × 10−3 °/s, the average estimated error of side slip angle was 0.3 × 10−3 °, and the simulation result shows that the algorithm can effectively estimate the vehicle state parameter, high estimation precision, and meet the demand of the vehicle online estimate;
- (2)
- With the double-lane change condition and snake conditions for electric vehicles, the yawing motion simulation layer is used to verify. The simulation results show that the maximum errors of yaw velocity are 0.4335 °/s and 1.3647 °/s, respectively, in double-lane change and snaking conditions, which can better track the target value of the yaw rate. The maximum errors of the side slip angle of the center of mass are 0.34°and 0.7334°, respectively. The side slip angle of the center of mass is far below the limit range, which ensures that the vehicle has a sufficient yaw stability margin in the course of steering;
- (3)
- In this paper, the four-wheel-independent-drive electric vehicle state parameter observation and yawing stability study comprehensively improve the real-time stability of the vehicle safety. However, this paper still has some shortcomings. The proposed method can only focus on the influence of the stability of the horizontal pendulum on the state parameters, but ignores the multi-parameter state observation to improve the effect of the yaw stability controller. In addition, in the case of drive skid and drive failure, how to maintain the driving capacity of each wheel to ensure the lateral stability of the vehicle, still needs further research.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhou, Y.; Li, S. ABS control algorithm for 4-WID Electric Vehicles. Automot. Eng. 2007, 29, 1046–1050. [Google Scholar]
- BP. BP Statistical Review of World Energy [EB/OL]. Available online: https://www.bp.com/content/dam/bp/business-sites/en/global/corporatepdfs/energy-economics/statistical-review/ (accessed on 6 November 2019).
- Xie, X.; Jin, L.; Jiang, Y.; Guo, B. Research on Integrated Control Method for Handling and Stability of Distributed Electric Vehicle; Jilin University: Changchun, China, 2018. [Google Scholar]
- Chen, Y.; Chen, S.; Zhao, Y.; Gao, Z.; Li, C. Optimized handling stability control strategy for a four in-wheel motor independent-drive electric vehicle. IEEE Access 2019, 7, 17017–17032. [Google Scholar] [CrossRef]
- Ye, G. Research on Direct Yaw Torque Control Strategy of Electric Wheeled Vehicle; Wuhan University of Science and Technology: Wuhan, China, 2018. [Google Scholar]
- Goodarzi, A.; Mohammadi, M. Stability enhancement and fuel economy of the 4-wheel-drive hybrid electric vehicles by optimal tyre force distribution. Veh. Syst. Dyn. 2014, 52, 539–561. [Google Scholar] [CrossRef]
- Eslamian, M.; Alizadeh, G.; Mirzaei, M. Optimization-based non-linear yaw moment control law for stabilizing vehicle lateral dynamics. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2007, 221, 1513–1523. [Google Scholar] [CrossRef]
- Zong, C.; Zheng, H.; Tian, C.; Pan, Z.; Dong, Y.; Yuan, D. Vehicle stability based on direct yaw moment control qualitative control strategy. J. Jilin Univ. 2008, 38, 1010–1014. [Google Scholar]
- Li, S.; Guo, K.; Qiu, T.; Wang, G.; Cui, G. Active front wheel steering is stable under extreme. Cond. Automot. Eng. 2020, 42, 191–198. (In Chinese) [Google Scholar]
- Hu, Z. Research on AFS/DYC Cooperative Control Strategy of Distributed Drive Electric Vehicle; Chongqing University: Chongqing, China, 2018. [Google Scholar]
- Wang, Z.; Xue, X.; Wang, Y. Vehicle state parameter estimation based on adaptive untracked kalman filter for distributed drive electric vehicle. J. Beijing Inst. Technol. 2018, 38, 698–702. [Google Scholar]
- Zhao, W.; Zhang, H.; Wang, C. Vehicle state parameter estimation based on untraceless kalman filter. J. South China Univ. Technol. 2016, 4, 76–88. [Google Scholar]
- Bingbing, G.; Gaoge, H.; Shesheng, G.; Yongmin, Z.; Ghengfan, G. Multi–sensor optimal data fusion for INS/GNSS/CNS integration based on unscented Kalman filter. Int. J. Control. Autom. Syst. 2018, 16, 129–140. [Google Scholar]
- Bersani, M.; Vignati, S.; Mentasti, S.; Arrigoni, F.; Cheli, F. Vehicle state estimation based on Kalman filters. In Proceedings of the 2019 AEIT. International Conference of Electrical and Electronic Technologies for Automotive (AEIT AUTOMOTIVE), Turin, Italy, 2–4 July 2019; p. 16. [Google Scholar]
- Mingyang, W.; Jie, J. Laguerre function model predictive control of yaw moment of electric vehicle. J. Chongqing Univ. 2018, 41, 61–69. [Google Scholar]
- Chen, Q. Research on Multi-Model Predictive Control Method for Four-Wheel Independent Drive Electric Vehicle System; Southeast University: Nanjing, China, 2015. [Google Scholar]
- Yu, Z.; Feng, Y.; Xiong, L. Overview of the development status of distributed drive Electric Vehicle dynamics control. J. Mech. Eng. 2013, 49, 105–114. [Google Scholar] [CrossRef]
- Electric Vehicle Resource Network. “1 + 7” Interpretation of the Main Content of “Energy Saving and New Energy Vehicle Technology Roadmap” [EB/OL]. Available online: http://www.evpartner.com/news/8/detail-23214.html (accessed on 26 October 2016).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Turn | Left Limit | Right Limit |
|---|---|---|
| Steering wheel angle (°) | −497 | 501 |
| Front-wheel angle (°) | −35 | 35 |
| Time (s) | 5.5 | 5.5 |
| Parameter Names | Numerical Value | Parameter Names | Numerical Value |
|---|---|---|---|
| Width/mm | 1440 | Vehicle height/mm | 1780 |
| height of center of mass/mm | 540 | The moment of inertia around the X-axis/kg·m2 | 288 |
| Total weight/kg | 1000 | The moment of inertia around the Y-axis/kg·m2 | 2031.4 |
| wheel base/mm | 2600 | The moment of inertia around the Z-axis/kg·m2 | 2031.4 |
| The distance from the center of mass to the front axis/mm | 1040 | Reference model front shaft cornering stiffness/N·rad-1 | −53,388 |
| The distance from the center of mass to the back axis/mm | 1560 | Reference model rear shaft cornering stiffness/N·rad-1 | −35,592 |
| The front wheel radius/mm | 311 | Rear wheel radius/mm | 311 |
| Wheel base/mm | 1210 | Tire outside diameter/mm | 580 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, C.; Chang, B.; Zhang, R.; Wang, R.; Wang, J. Observation of Dynamic State Parameters and Yaw Stability Control of Four-Wheel-Independent-Drive EV. World Electr. Veh. J. 2021, 12, 105. https://doi.org/10.3390/wevj12030105
Zhang C, Chang B, Zhang R, Wang R, Wang J. Observation of Dynamic State Parameters and Yaw Stability Control of Four-Wheel-Independent-Drive EV. World Electric Vehicle Journal. 2021; 12(3):105. https://doi.org/10.3390/wevj12030105
Chicago/Turabian StyleZhang, Chuanwei, Bo Chang, Rongbo Zhang, Rui Wang, and Jianlong Wang. 2021. "Observation of Dynamic State Parameters and Yaw Stability Control of Four-Wheel-Independent-Drive EV" World Electric Vehicle Journal 12, no. 3: 105. https://doi.org/10.3390/wevj12030105
APA StyleZhang, C., Chang, B., Zhang, R., Wang, R., & Wang, J. (2021). Observation of Dynamic State Parameters and Yaw Stability Control of Four-Wheel-Independent-Drive EV. World Electric Vehicle Journal, 12(3), 105. https://doi.org/10.3390/wevj12030105