Eco-Driving for Different Electric Powertrain Topologies Considering Motor Efficiency


Abstract
1. Introduction
- “wheel-to-distance” optimization
- “tank-to-distance” optimization
- minimization of
- To formulate an online capable optimization of vehicle speed and powertrain operation for different electric powertrain topologies, taking realistic motor efficiency into account.
- To compare the optimization to a quadratic representation of the electrical power and to the minimization of acceleration, which are widely used in literature.
- To verify the optimization by a DP algorithm.
2. Methods
2.1. Eco-Driving-Algorithm
2.2. Algorithm in Car-Following
2.3. Dynamic Programming
2.4. Case Studies
3. Results
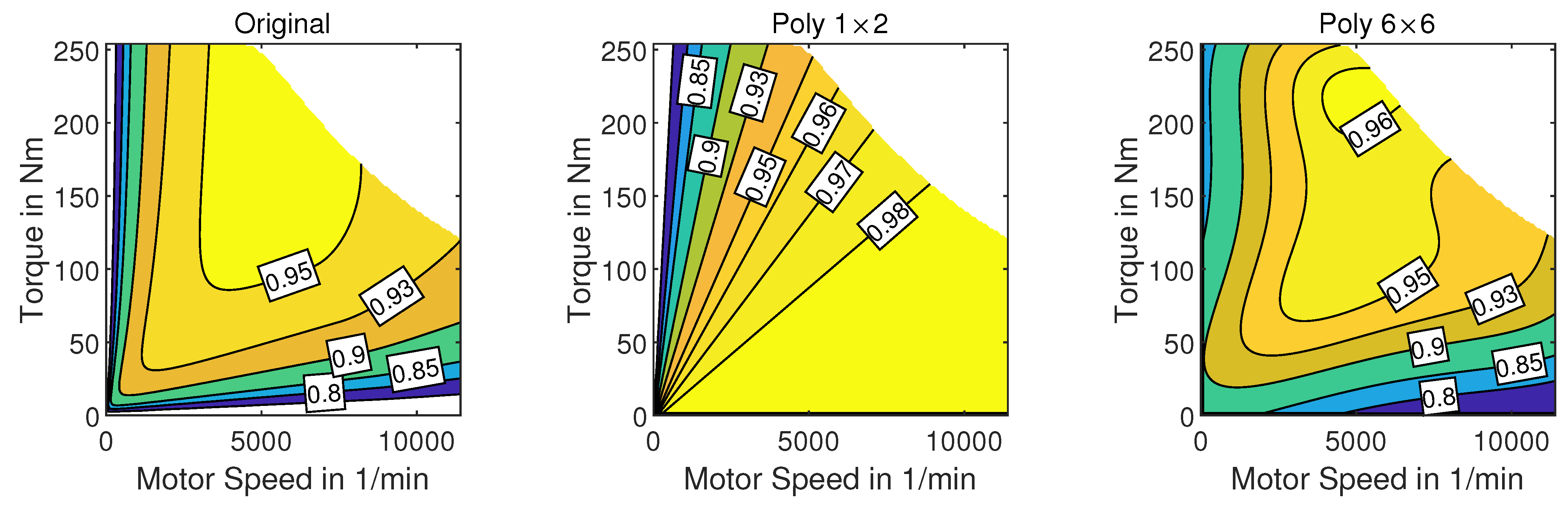
3.1. Comparison of Fits
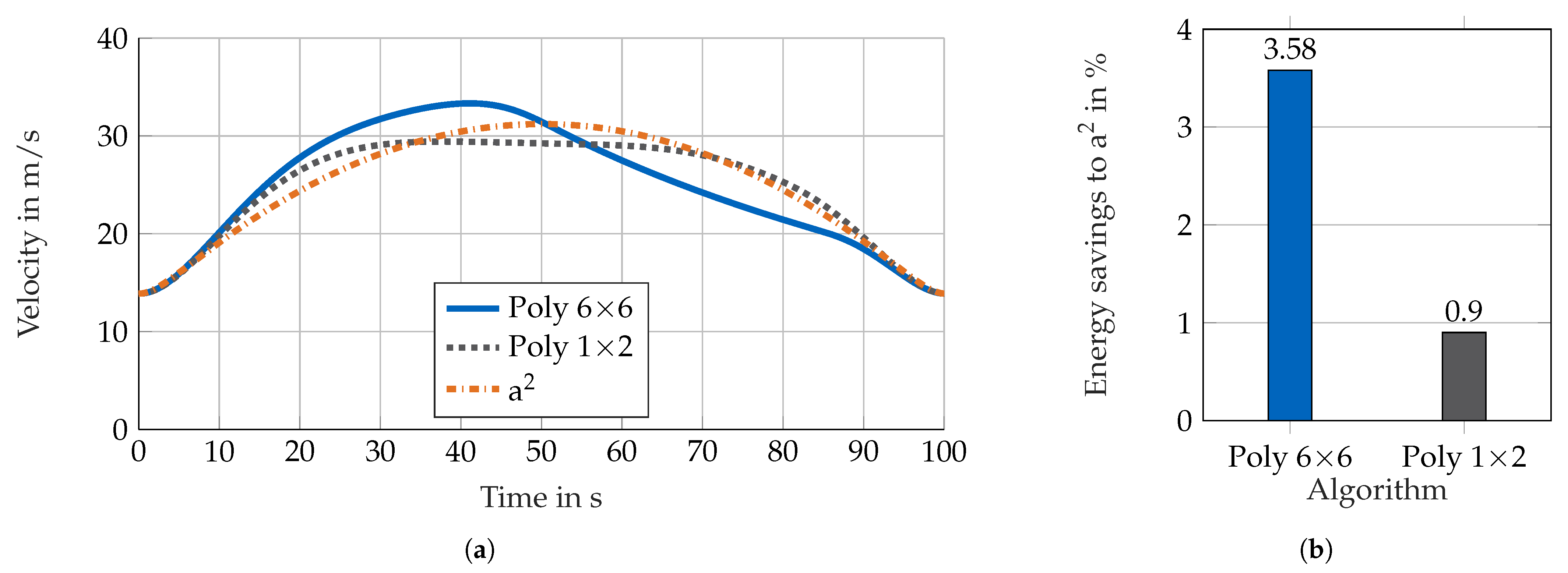
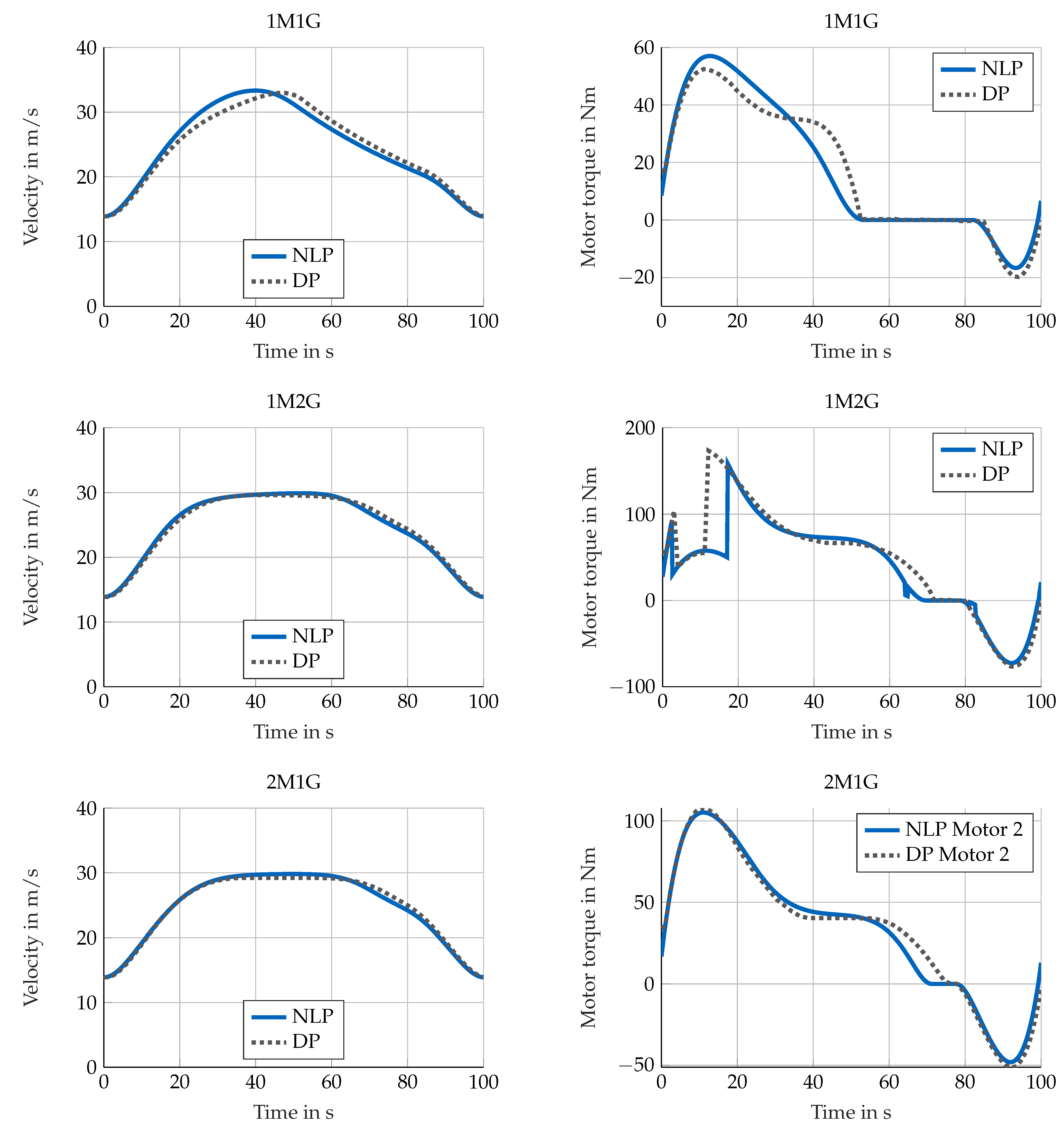
3.2. Comparison of Algorithms
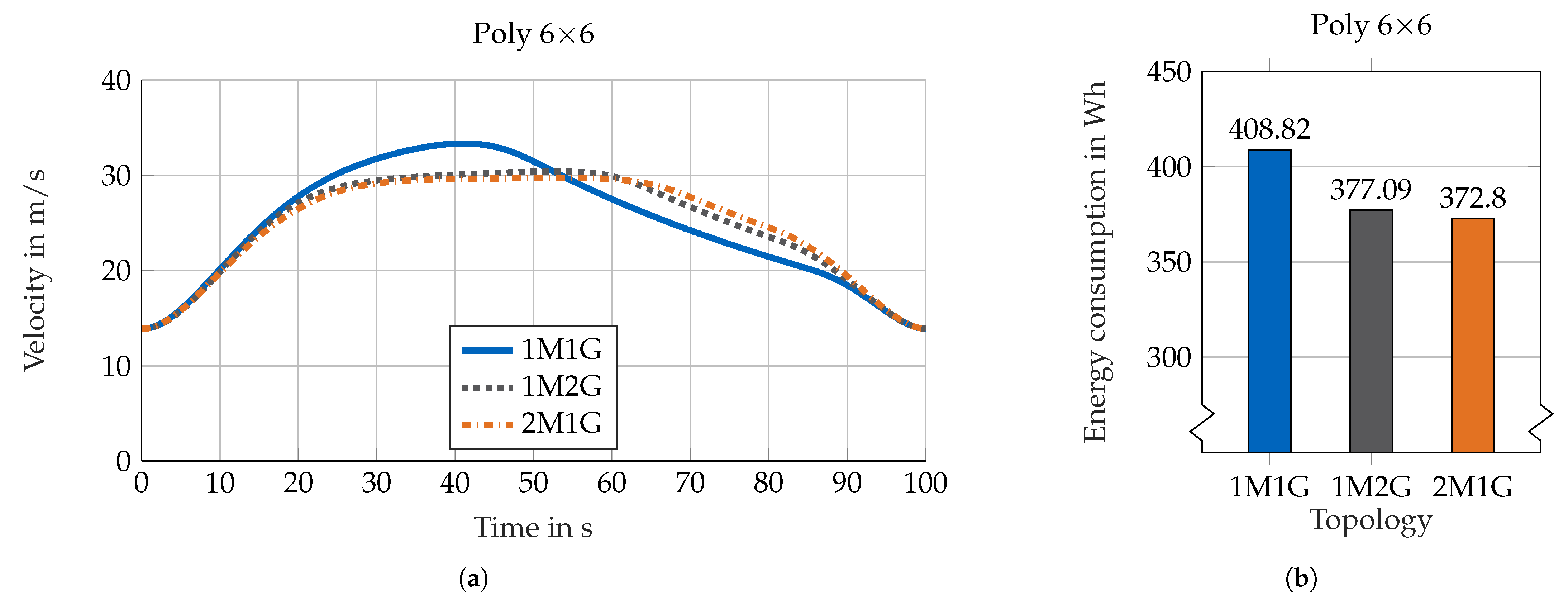
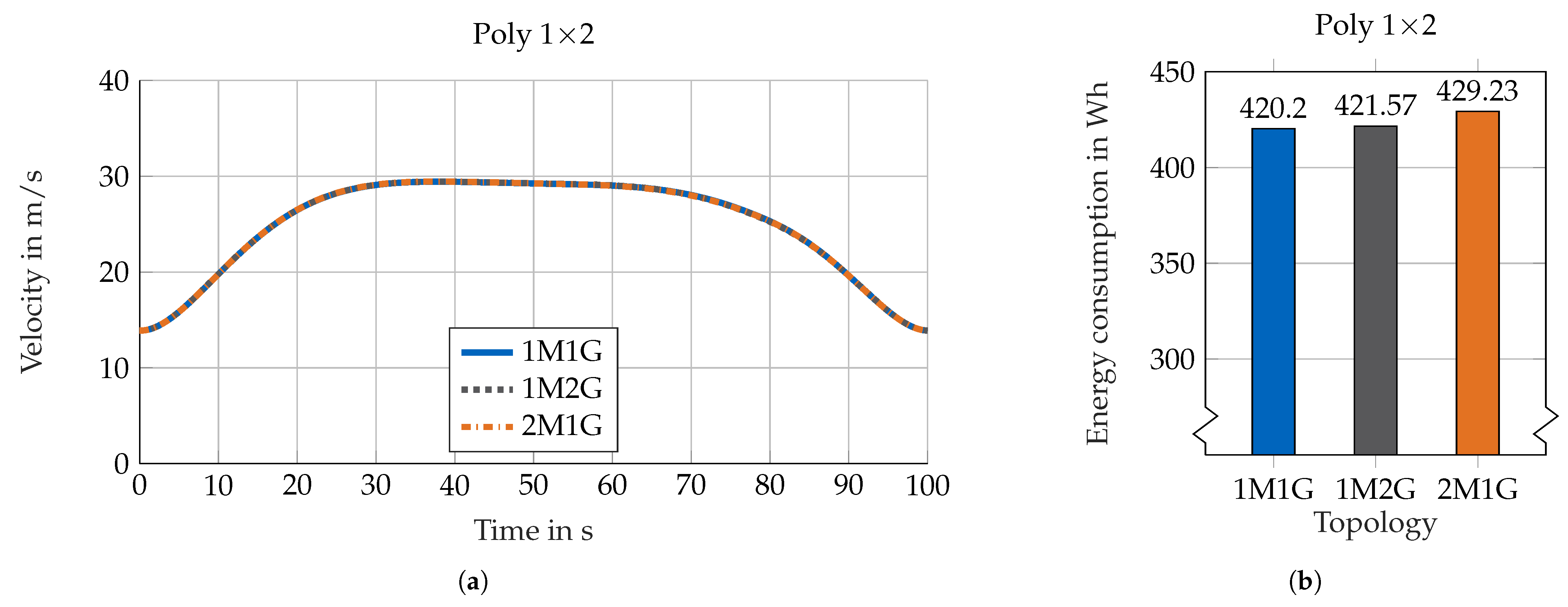
3.3. Comparison of Powertrain Topologies
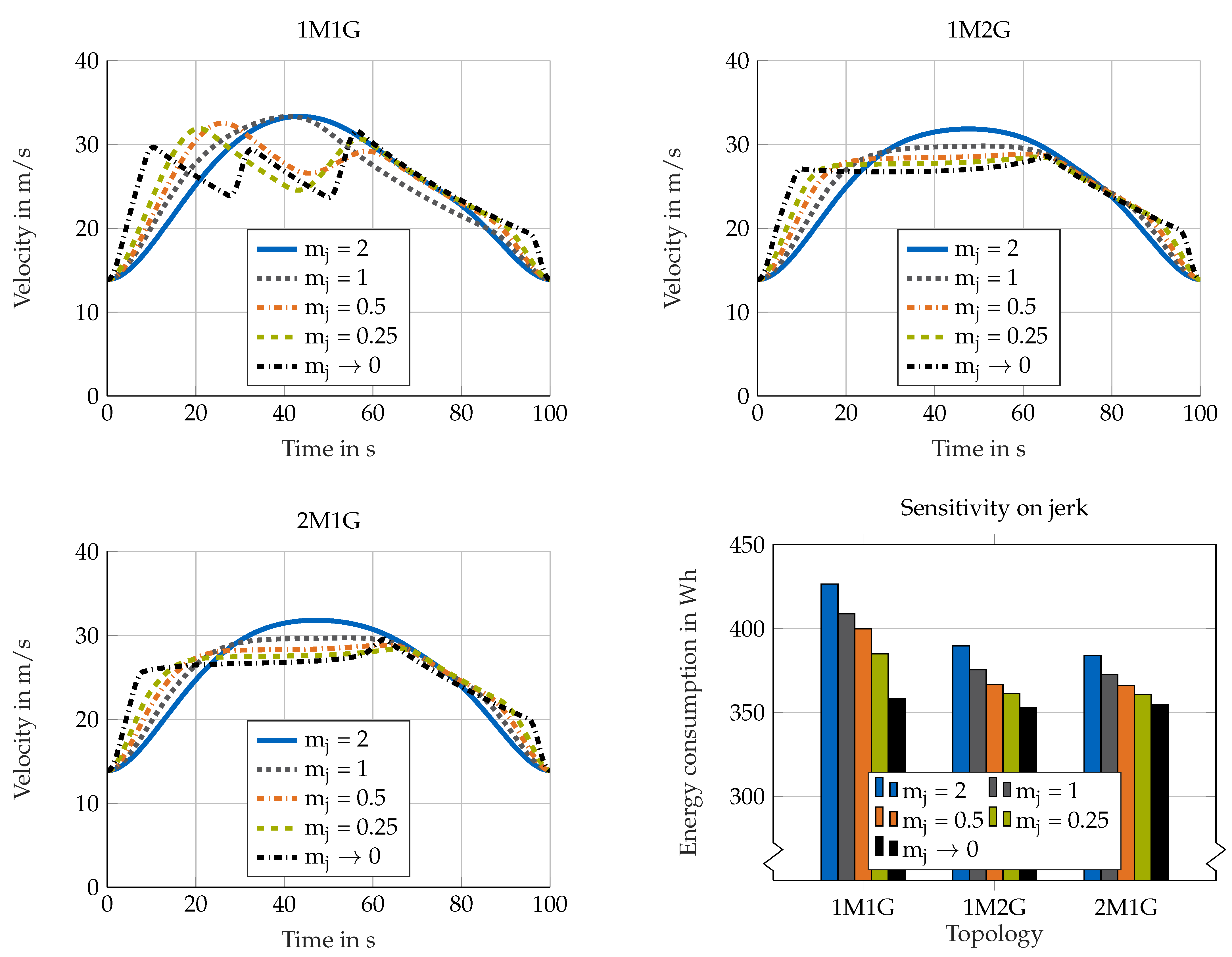
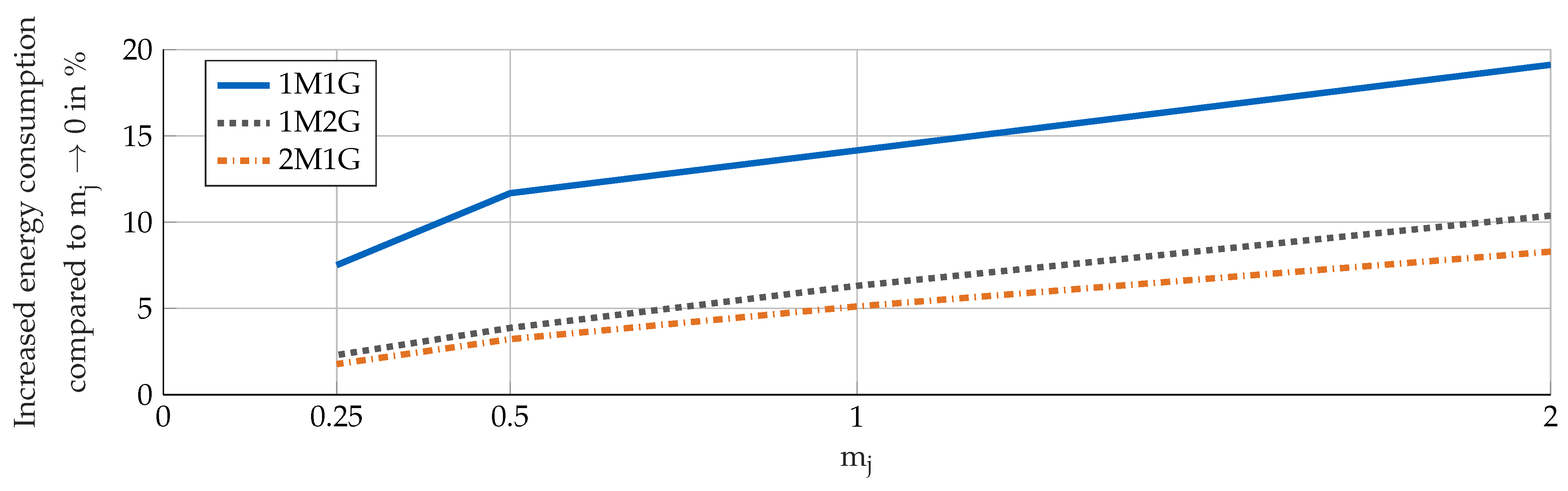
3.4. Sensitivity Analysis: Energy-Efficiency vs. Jerk
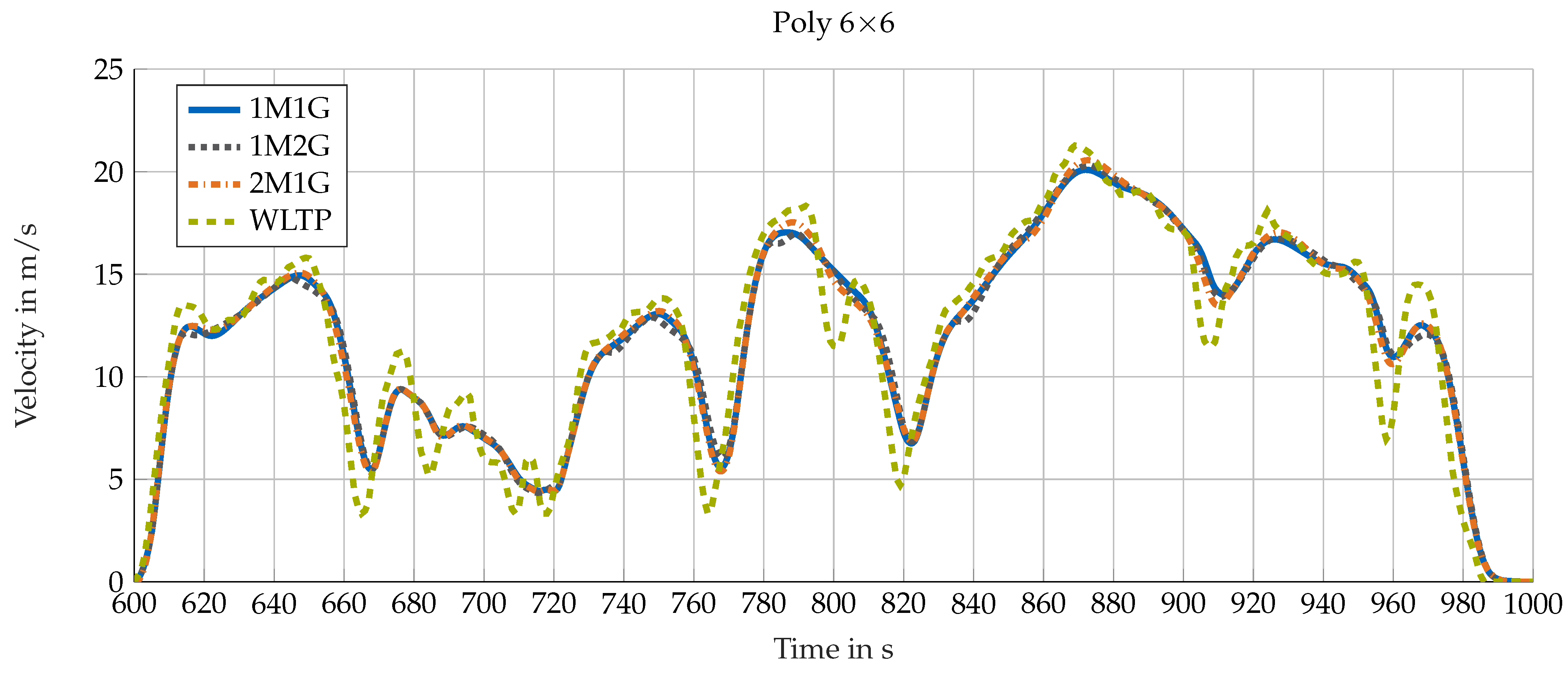
3.5. Car-Following
4. Discussion
4.1. Discussion of Results
4.2. Numerical Proof of Global Optimality
4.3. Limitations and Future Work
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| 1M1G | Topology with one motor and single-speed transmission |
| 1M2G | Topology with one motor and two-speed transmission |
| 2M1G | Topology with one motor and single-speed transmission at each axle |
| C2C | City-to-city scenario |
| CAV | Connected autonomous vehicle |
| CVT | Continuously variable transmission |
| DP | Dynamic Programming |
| HEV | Hybrid electric vehicle |
| IM | Induction motor |
| LUT | Look-up table |
| MPC | Model Predictive Control |
| NLP | Nonlinear programming |
| OCP | Optimal Control Problem |
| P&G | Pulse and Glide |
| PMSM | Permanent magnetic synchronous motor |
| WLTP | Worldwide harmonized light-vehicles test procedure |
Appendix A

References
- Eurostat. Final Energy Consumption in Road Transport by Type of Fuel. 2018. Available online: https://ec.europa.eu/eurostat/databrowser/view/ten00127/default/table?lang=en (accessed on 1 July 2020).
- Kopelias, P.; Demiridi, E.; Vogiatzis, K.; Skabardonis, A.; Zafiropoulou, V. Connected & autonomous vehicles—Environmental impacts—A review. Sci. Total Environ. 2020, 712, 135237. [Google Scholar] [CrossRef] [PubMed]
- Anselma, P.G.; Belingardi, G. Enhancing Energy Saving Opportunities through Rightsizing of a Battery Electric Vehicle Powertrain for Optimal Cooperative Driving. SAE Int. J. Connect. Autom. Veh. 2020, 3. [Google Scholar] [CrossRef]
- Tate, L.; Hochgreb, S.; Hall, J.; Bassett, M. Energy Efficiency of Autonomous Car Powertrain; SAE Technical Paper Series; SAE International400 Commonwealth Drive: Warrendale, PA, USA, 2018. [Google Scholar] [CrossRef]
- Ullekh Raghunatha Gambhira. Powertrain Optimization of an Autonomous Electric Vehicle. Master’s Thesis, The Ohio State University, Columbus, OH, USA, 2018.
- Christian Angerer. Antriebskonzept-Optimierung für Batterieelektrische Allradfahrzeuge. Ph.D. Thesis, Technische Universität München, München, Germany, 2020.
- Vaillant, M. Design Space Exploration zur Multikriteriellen Optimierung Elektrischer Sportwagenantriebsstränge. Ph.D. Thesis, Karlsruher Institut für Technologie, Karlsruhe, Germany, 2015. [Google Scholar]
- Hofman, T.; Dai, C. Energy efficiency analysis and comparison of transmission technologies for an electric vehicle. In Proceedings of the 2010 IEEE Vehicle Power and Propulsion Conference, Lille, France, 1–3 September 2010; pp. 1–6. [Google Scholar]
- Pesce, T. Ein Werkzeug zur Spezifikation von Effizienten Antriebstopologien für Elektrofahrzeuge. Ph.D. Thesis, Doktorhut, München, Germany, 2014. [Google Scholar]
- Sciarretta, A. Energy-Efficient Driving of Road Vehicles: Toward a Cooperative, Connected, and Automated Mobility; Springer International Publishing: Berlin/Heidelberg, Germany, 2019. [Google Scholar] [CrossRef]
- Mensing, F.; Trigui, R.; Bideaux, E. Vehicle trajectory optimization for application in ECO-driving. In Proceedings of the 2011 IEEE Vehicle Power and Propulsion Conference, Chicago, IL, USA, 6–9 September 2011; pp. 1–6. [Google Scholar]
- So, K.M.; Gruber, P.; Tavernini, D.; Karci, A.E.H.; Sorniotti, A.; Motaln, T. On the Optimal Speed Profile for Electric Vehicles. IEEE Access 2020, 8, 78504–78518. [Google Scholar] [CrossRef]
- Teichert, O.; Koch, A.; Ongel, A. Comparison of Eco-Driving Strategies for Different Traffic-Management Measures. In Proceedings of the 2020 IEEE Intelligent Transportation Systems Conference (ITSC), Rhodes, Greece, 20–23 September 2020; pp. 1867–1873. [Google Scholar]
- Han, J.; Vahidi, A.; Sciarretta, A. Fundamentals of energy efficient driving for combustion engine and electric vehicles: An optimal control perspective. Automatica 2019, 103, 558–572. [Google Scholar] [CrossRef]
- Dollar, R.A.; Vahidi, A. Quantifying the impact of limited information and control robustness on connected automated platoons. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; pp. 1–7. [Google Scholar] [CrossRef]
- Zhang, C.; Vahidi, A. Predictive cruise control with probabilistic constraints for eco driving. In Proceedings of the Dynamic Systems and Control Conference, Arlington, VA, USA, 31 October–2 November 2011; Volume 54761, pp. 233–238. [Google Scholar]
- Wegener, M.; Plum, T.; Eisenbarth, M.; Andert, J. Energy saving potentials of modern powertrains utilizing predictive driving algorithms in different traffic scenarios. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 234, 992–1005. [Google Scholar] [CrossRef]
- Eo, J.S.; Kim, S.J.; Oh, J.; Chung, Y.K.; Chang, Y.J. A Development of Fuel Saving Driving Technique for Parallel HEV; SAE Technical Paper Series; SAE International400 Commonwealth Drive: Warrendale, PA, USA, 2018. [Google Scholar] [CrossRef]
- Li, S.E.; Peng, H. Strategies to minimize the fuel consumption of passenger cars during car-following scenarios. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2012, 226, 419–429. [Google Scholar] [CrossRef]
- Shao, Y. Optimization and Evaluation of Vehicle Dynamics and Powertrain Operation for Connected and Autonomous Vehicles; Dissertation, University of Minnesota Digital Conservancy. 2019. Available online: http://hdl.handle.net/11299/211322 (accessed on 28 December 2020).
- Guo, L.; Gao, B.; Gao, Y.; Chen, H. Optimal Energy Management for HEVs in Eco-Driving Applications Using Bi-Level MPC. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2153–2162. [Google Scholar] [CrossRef]
- Qi, X.; Wu, G.; Hao, P.; Boriboonsomsin, K.; Barth, M.J. Integrated-Connected Eco-Driving System for PHEVs with Co-Optimization of Vehicle Dynamics and Powertrain Operations. IEEE Trans. Intell. Veh. 2017, 2, 2–13. [Google Scholar] [CrossRef]
- Li, L.; Wang, X.; Song, J. Fuel consumption optimization for smart hybrid electric vehicle during a car-following process. Mech. Syst. Signal Process. 2017, 87, 17–29. [Google Scholar] [CrossRef]
- Li, Y.; Wu, D.; Du, C.; Yang, H.; Li, Y.; Yang, X.; Lu, X. Velocity Trajectory Planning for Energy Savings of an Intelligent 4WD Electric Vehicle Using Model Predictive Control; SAE Technical Paper Series; SAE International400 Commonwealth Drive: Warrendale, PA, USA, 2018. [Google Scholar] [CrossRef]
- Lelouvier, A.; Guanetti, J.; Borrelli, F. Eco-platooning of autonomous electrical vehicles using distributed model predictive control. Parameters 2017, 2, 4. [Google Scholar]
- Murgovski, N.; Johannesson, L.; Sjöberg, J. Convex modeling of energy buffers in power control applications. IFAC Proc. Vol. 2012, 45, 92–99. [Google Scholar] [CrossRef]
- Padilla, G.; Weiland, S.; Donkers, M. A global optimal solution to the eco-driving problem. IEEE Control Syst. Lett. 2018, 2, 599–604. [Google Scholar] [CrossRef]
- Guzzella, L.; Sciarretta, A. Vehicle Propulsion Systems: Introduction to Modeling and Optimization, 3rd ed.; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar] [CrossRef]
- Mitschke, M.; Wallentowitz, H. Dynamik der Kraftfahrzeuge; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2014. [Google Scholar] [CrossRef]
- Marler, R.T.; Arora, J.S. The weighted sum method for multi-objective optimization: New insights. Struct. Multidiscip. Optim. 2010, 41, 853–862. [Google Scholar] [CrossRef]
- Andersson, J.A.E.; Gillis, J.; Horn, G.; Rawlings, J.B.; Diehl, M. CasADi—A software framework for nonlinear optimization and optimal control. Math. Program. Comput. 2019, 11, 1–36. [Google Scholar] [CrossRef]
- Wächter, A.; Biegler, L.T. On the implementation of an interior-point filter line-search algorithm for large-scale nonlinear programming. Math. Program. 2006, 106, 25–57. [Google Scholar] [CrossRef]
- Mersky, A.C.; Samaras, C. Fuel economy testing of autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2016, 65, 31–48. [Google Scholar] [CrossRef]
- Kalt, S.; Erhard, J.; Lienkamp, M. Electric Machine Design Tool for Permanent Magnet Synchronous Machines and Induction Machines. Machines 2020, 8, 15. [Google Scholar] [CrossRef]
- BMW. Technische Daten.Der neue BMWi3. 2017. Available online: https://www.press.bmwgroup.com/deutschland/article/attachment/T0273661DE/392973 (accessed on 9 July 2020).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | C2C | Car-Following |
|---|---|---|
| Initial acceleration | 0 m/s2 | 0 m/s2 |
| Final acceleration | 0 m/s2 | 0 m/s2 |
| Initial velocity | 50 m/s | 0 m/s |
| Final velocity | 50 m/s | 0 m/s |
| Final time | 100 s | - |
| Final distance | 2500 m | - |
| Minimal velocity | 40 km/h | v − 18 km/h |
| Maximal velocity | 120 km/h | v + 18 km/h |
| Min./max. jerk | ±0.9 m/s3 | ±0.9 m/s3 |
| Min. acceleration | −3.5 m/s2 | −3.5 m/s2 |
| Max. acceleration | 2 m/s2 | 2 m/s2 |
| Minimal time gap | - | 1.5 s |
| Maximal time gap | - | 3.5 s |
| Reference time gap | - | 2.5 s |
| Max. distance at stand still | - | 5 m |
| Parameter | Value | Unit | Source |
|---|---|---|---|
| m | 1320 | kg | [35] |
| 1.05 | - | Estimated | |
| r | 0.35 | m | [35] |
| 2.8 | m2 | - | |
| 0.29 | - | [35] | |
| 0.01 | - | Estimated | |
| 125 (PMSM) | kW | [35] | |
| 250 | Nm | [35] | |
| 9.665 | - | [35] | |
| 0.95 | - | Estimated | |
| 3 | - | - | |
| 0.96 | - | Estimated | |
| 20 | kg | Estimated | |
| 36 (IM) | kW | - | |
| 110 | Nm | - | |
| 5 | - | - | |
| 0.96 | - | Estimated | |
| 80 | kg | Estimated |
| Experiment (Section) | Algorithm | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| C2C (3.2–3.4) | 4 | 1 | 0 | 0 | 0.1 | 0.2 | - | - | Reference | |
| Poly 6 × 6/Poly 1 × 2 | 0 | 0 | 0 | 0.1 | 0.2 | - | - | Yes | ||
| [l]C2C-DP Comparison (4.2) | DP | 250 | 0 | 0 | 0 | 0 | - | - | No | |
| Poly 6 × 6 | 250 | 0 | 0 | 0.1 | 0.2 | - | - | No | ||
| Car-following (3.5) | Poly 6 × 6/Poly 1 × 2 | 0.15 | 0 | 0.1 | 0.2 | 0.1 | No |
| Algorithm | 1M1G | 1M2G | 2M1G | |
|---|---|---|---|---|
| Abs. in Wh | 424.0 | 379.9 | 377.1 | |
| Poly 1 × 2 | Abs. in Wh | 420.2 | 421.6 | 429.2 |
| Rel. difference to in % | −0.9 | +11 | +13.8 | |
| Presented Poly 6 × 6 | Abs. in Wh | 408.8 | 377.1 | 372.8 |
| Rel. difference to in % | −3.6 | −0.7 | −1.1 | |
| Rel. difference to Poly 1 × 2 in % | −2.8 | −11.8 | −15.1 |
| Algorithm/Cycle | 1M1G | 1M2G | 2M1G | |
|---|---|---|---|---|
| WLTP | Abs. in kWh | 3.24 | 2.95 | 3.0 |
| Poly 1 × 2 | Abs. in kWh | 3.17 | 3.16 | 3.29 |
| Rel. difference to WLTP in % | −2.4 | +7.2 | +9.7 | |
| Presented Poly 6 × 6 | Abs. in kWh | 3.12 | 2.82 | 2.85 |
| Rel. difference to WLTP in % | −3.7 | −4.5 | −5 | |
| Rel. difference to Poly 1 × 2 in % | −1.4 | −10.9 | −13.4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Koch, A.; Bürchner, T.; Herrmann, T.; Lienkamp, M. Eco-Driving for Different Electric Powertrain Topologies Considering Motor Efficiency. World Electr. Veh. J. 2021, 12, 6. https://doi.org/10.3390/wevj12010006
Koch A, Bürchner T, Herrmann T, Lienkamp M. Eco-Driving for Different Electric Powertrain Topologies Considering Motor Efficiency. World Electric Vehicle Journal. 2021; 12(1):6. https://doi.org/10.3390/wevj12010006
Chicago/Turabian StyleKoch, Alexander, Tim Bürchner, Thomas Herrmann, and Markus Lienkamp. 2021. "Eco-Driving for Different Electric Powertrain Topologies Considering Motor Efficiency" World Electric Vehicle Journal 12, no. 1: 6. https://doi.org/10.3390/wevj12010006
APA StyleKoch, A., Bürchner, T., Herrmann, T., & Lienkamp, M. (2021). Eco-Driving for Different Electric Powertrain Topologies Considering Motor Efficiency. World Electric Vehicle Journal, 12(1), 6. https://doi.org/10.3390/wevj12010006