Testing and Analysis Fault of Induction Motor for Case Study Misalignment Installation Using Current Signal with Energy Coefficient



Abstract
1. Introduction
- Analysis of an electric current signal while the motor is running;
- Analysis of a vibration signal while the motor is running;
- Analysis of a sound signal;
- Analysis of thermal imagery.
2. The Conception and Proposed Methods
2.1. Installation Misalignment Types
2.2. Digital Signal Processing Techniques
2.3. Analysis Technique and Determine Energy Coefficient of Current Signal
3. Research Methods
- The parameters of the three-phase induction motor are 11 kW, 380 V, 50 Hz, and four poles, as shown in Table 1;
- The instrument was used for measuring the eccentricity of the rotor shaft;
- For the motor startup, the control unit is set to the star and delta switch, which reduces the high current during startup;
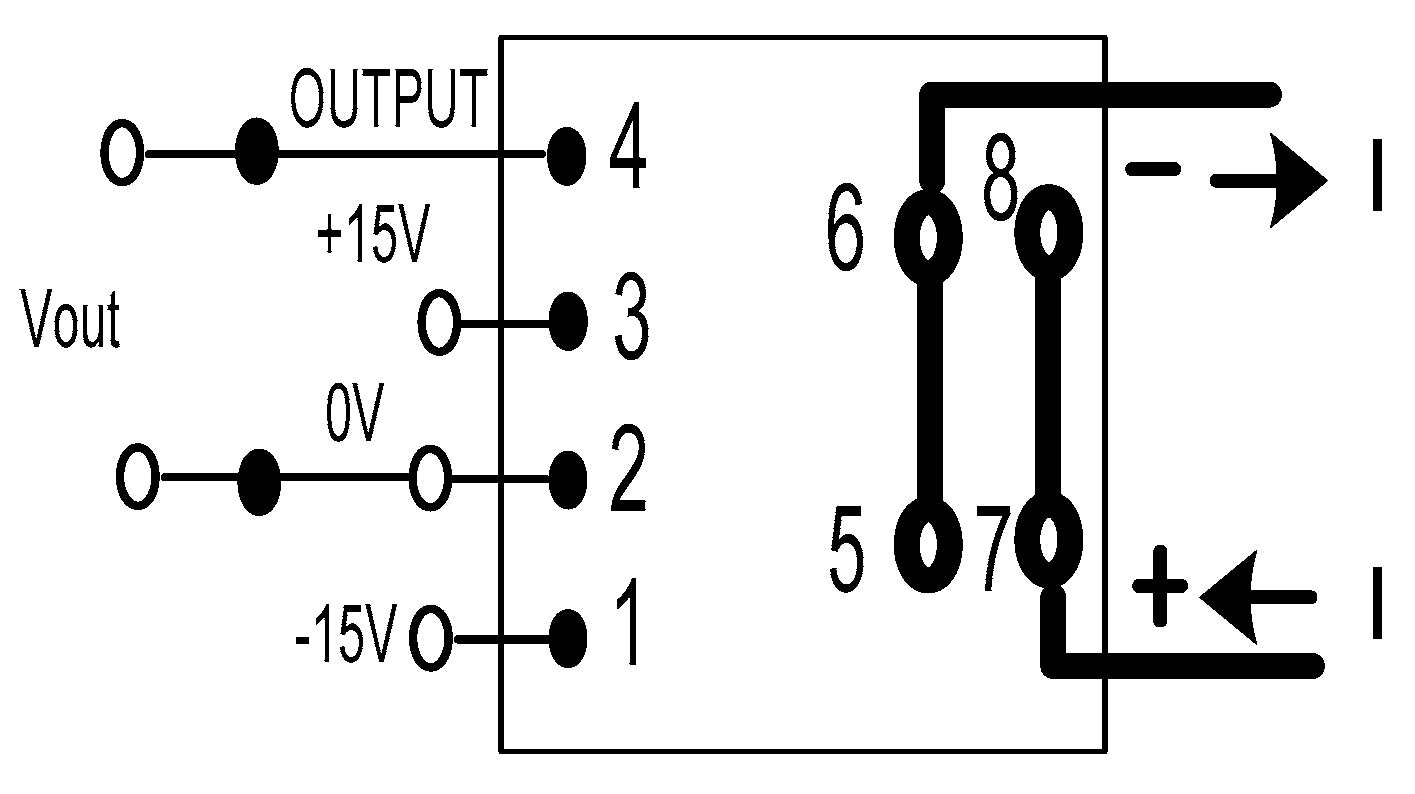
- The current signal sensors are set with the current type (LEN-HX-10NP), with 1% accuracy, 1% linearity, DC at a 50 kHz frequency bandwidth, 20 A input current Ip, and 4 V output voltage, as shown in Figure 2;
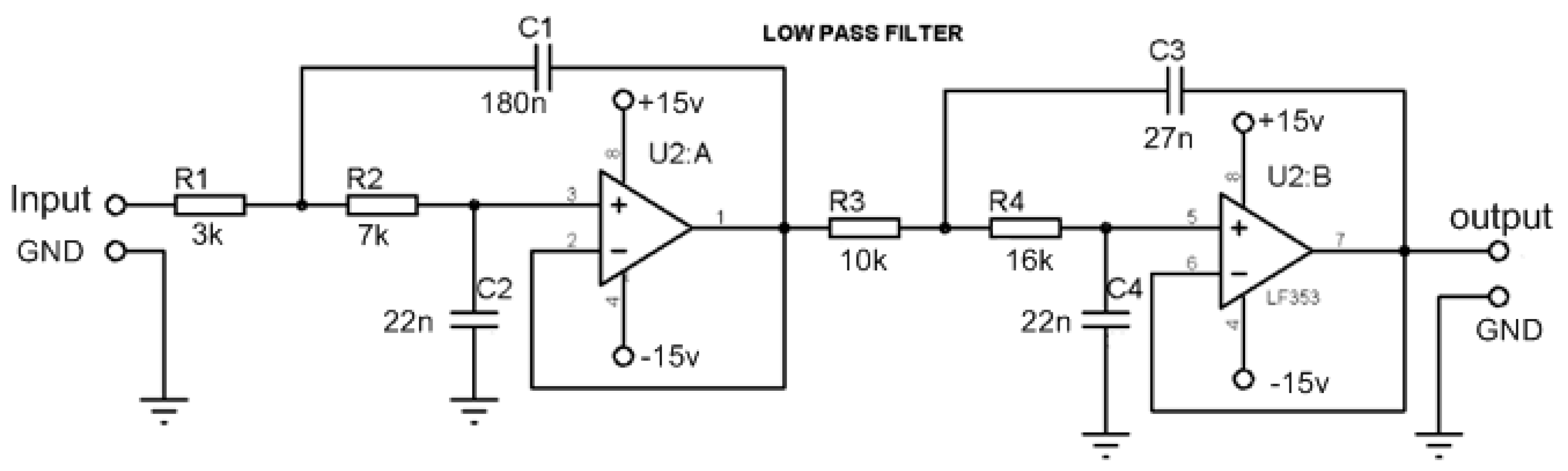
- A fourth-order low-pass filter circuit with a cut-off frequency of 500 Hz is included in the design. Because the motor current signal is incorporated with a high frequency, the high-frequency signal needs to be eliminated using the current circuit filter, as shown in Figure 3;
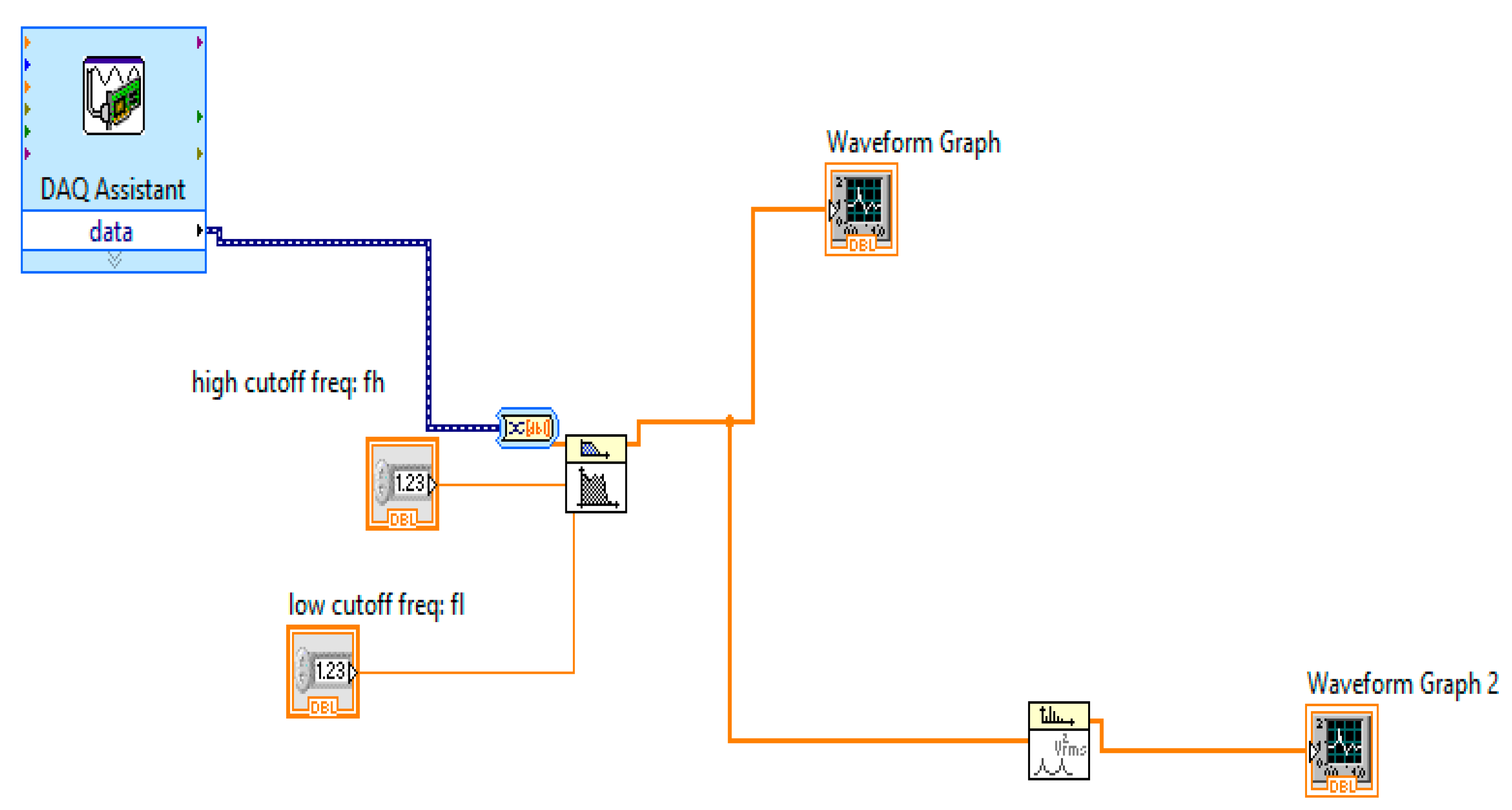
- The data acquisition card for receiving signal data for analysis is a Micro USB DAQ that inputs and outputs 30 points and operates in both digital and analog input modes;
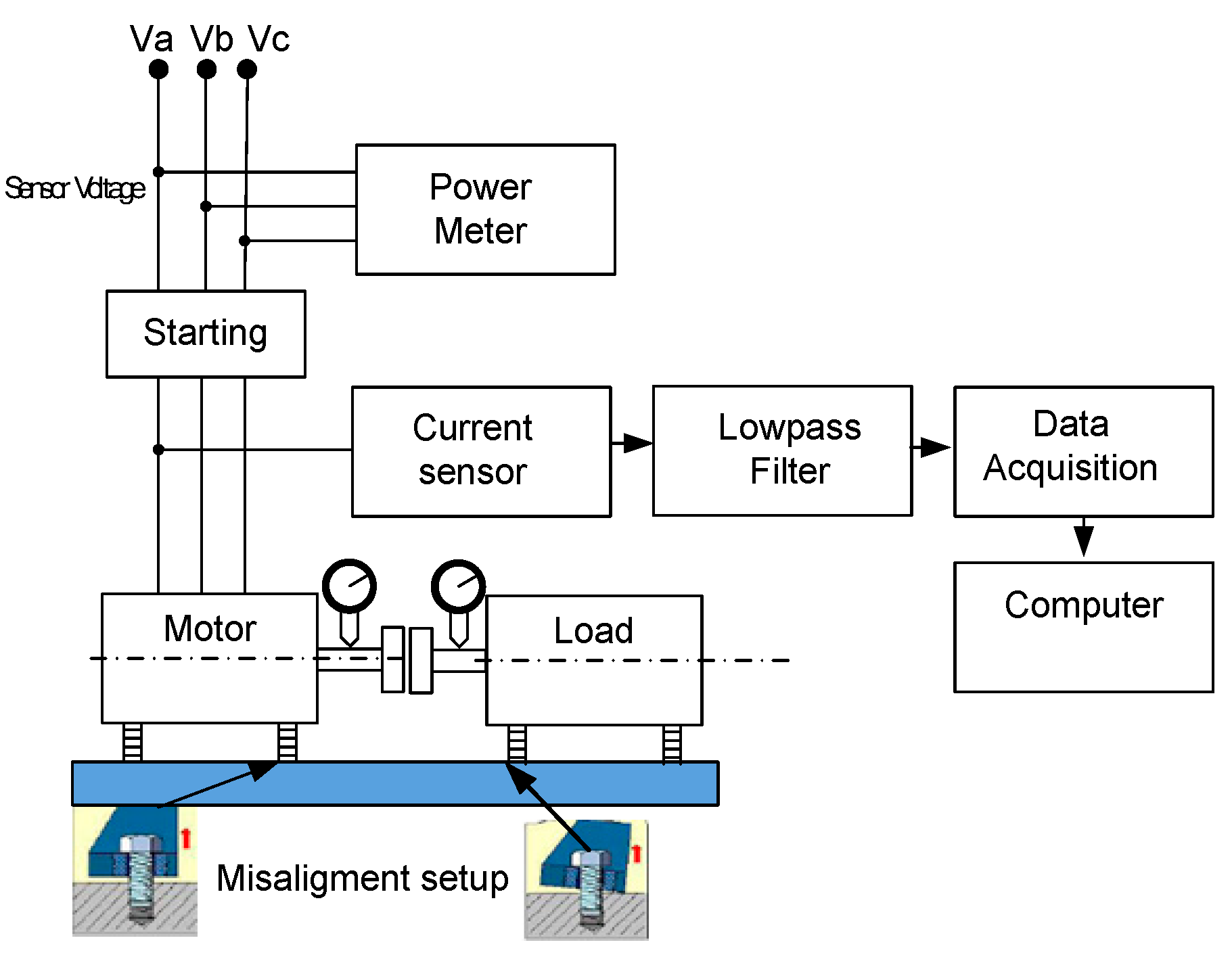
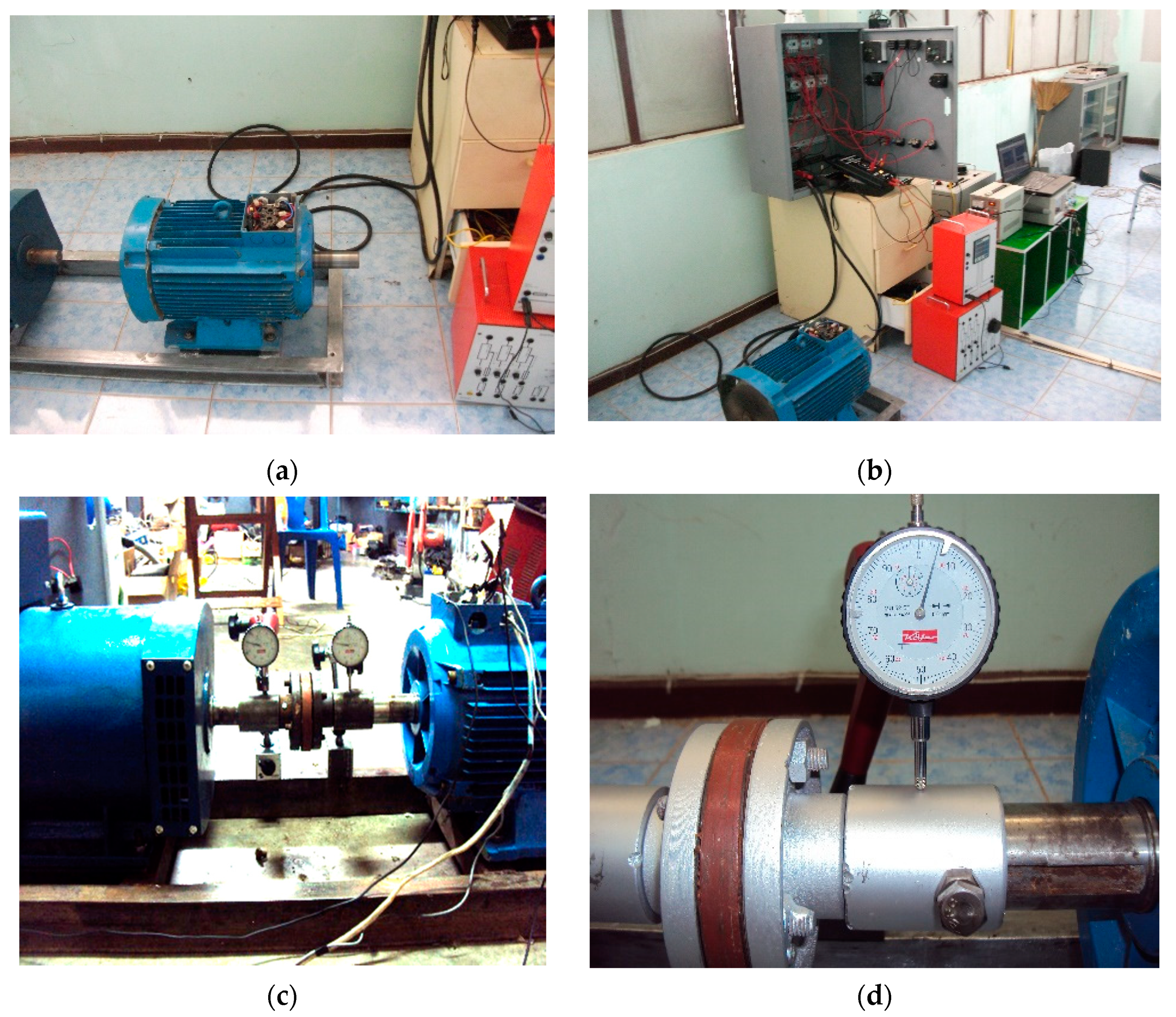
- Figure 4. shows the circuit that is connected to the equipment for data recording during testing [24].Figure 5a,b shows the setup of the experimental set with a three-phase induction motor and star-delta starting method. Figure 5c,d shows setup the misalignment installation fault provided by the bolt base under motor, which acts on the base under motor and checking with a dial gauge. The adjustable shaft misalignment by the FISSO Ref: LS30.10 with switch magnet (M); overall height: 367 mm; horizontal: 10 mm dia. × 106 mm length; vertical: 12 mm dia. × 156 mm length; base size: 60 mm × 50 mm × 55 mm; holding strength approx. 800 N; weight: 1.660 kg [25];
- The eccentric rotor shaft defect test was carried out as follows. Figure 5a,b shows the test setup for a motor in the no-load mode. A medium motor type was used; therefore, the star-delta starting method was employed to reduce the high current when starting the motor. The low-pass frequency circuit was then detected by sampling at a sampling frequency of 4 kHz, and the current signal was recorded with a DAQ card.
4. Results and Discussion
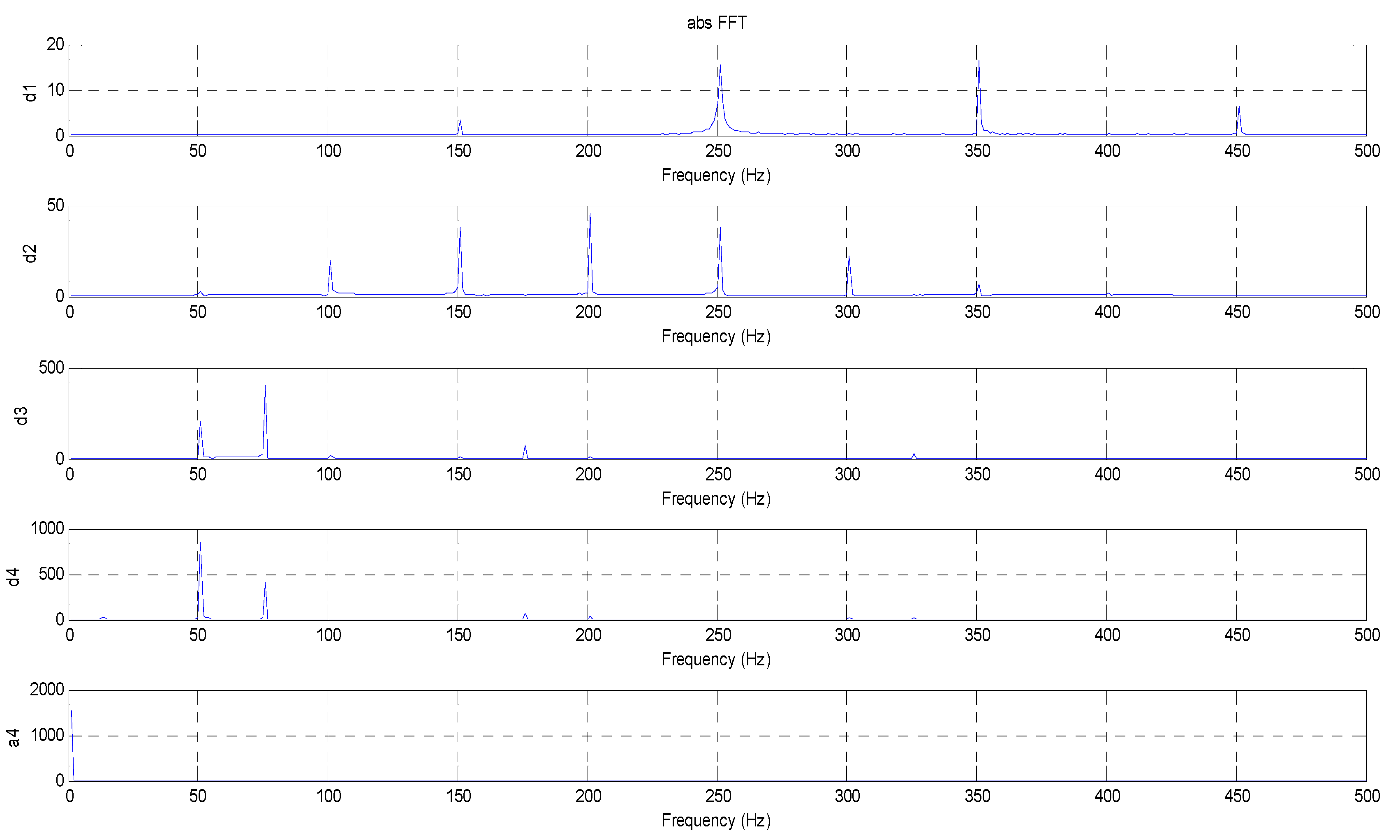
4.1. Experimental Result at the Normal Condition
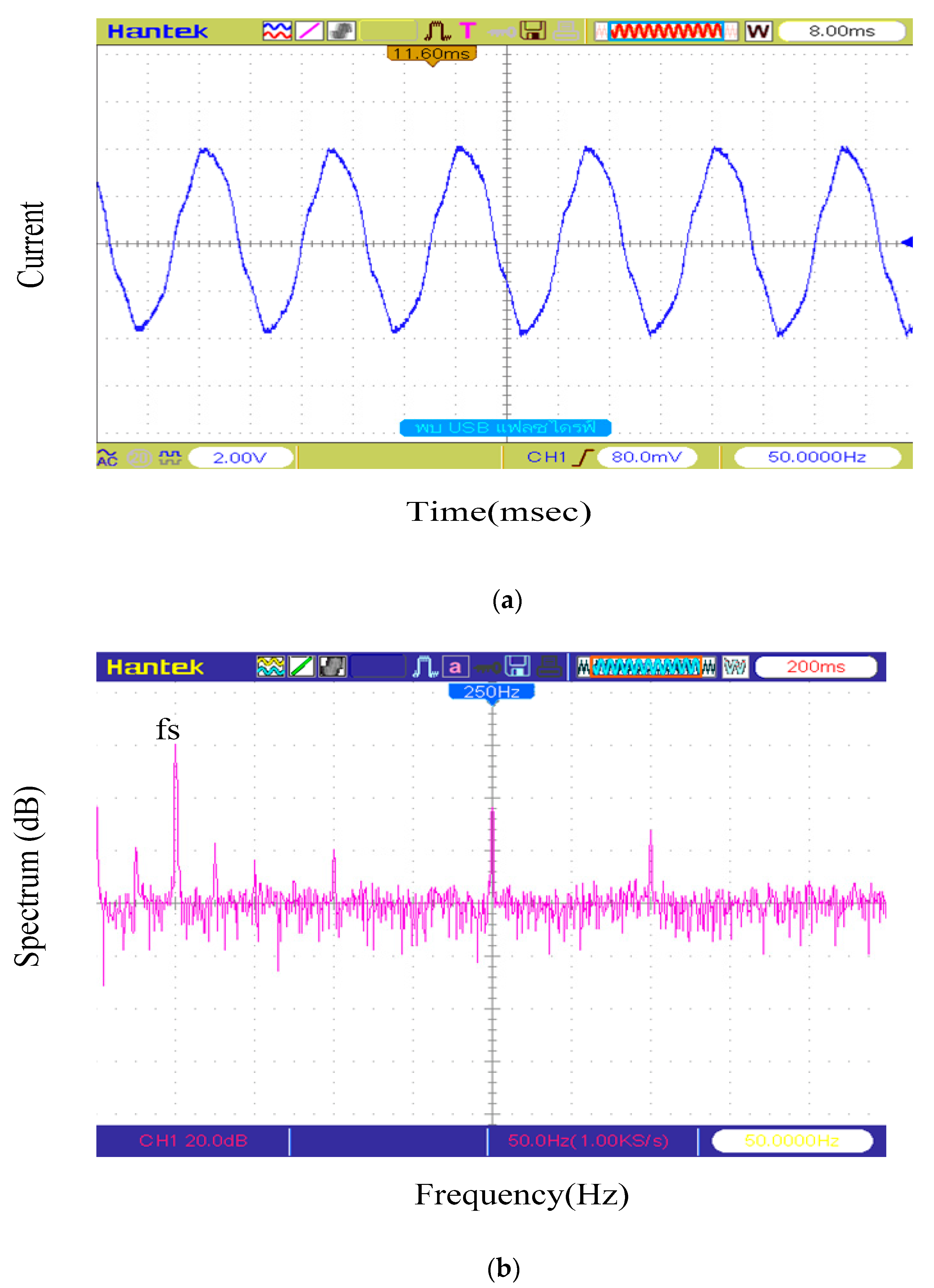
Results of Current Signal Detection in the Time and Frequency Domains
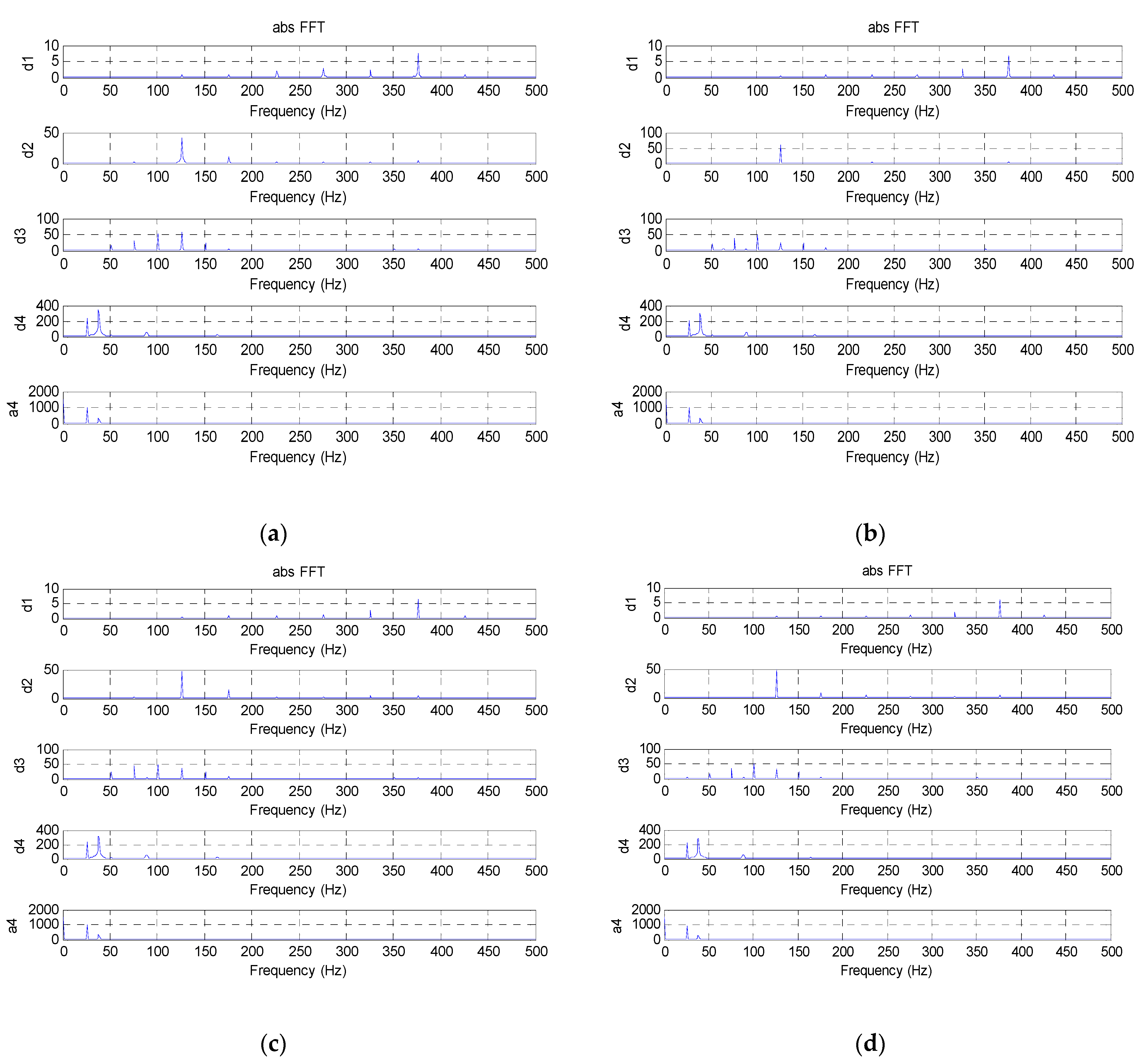
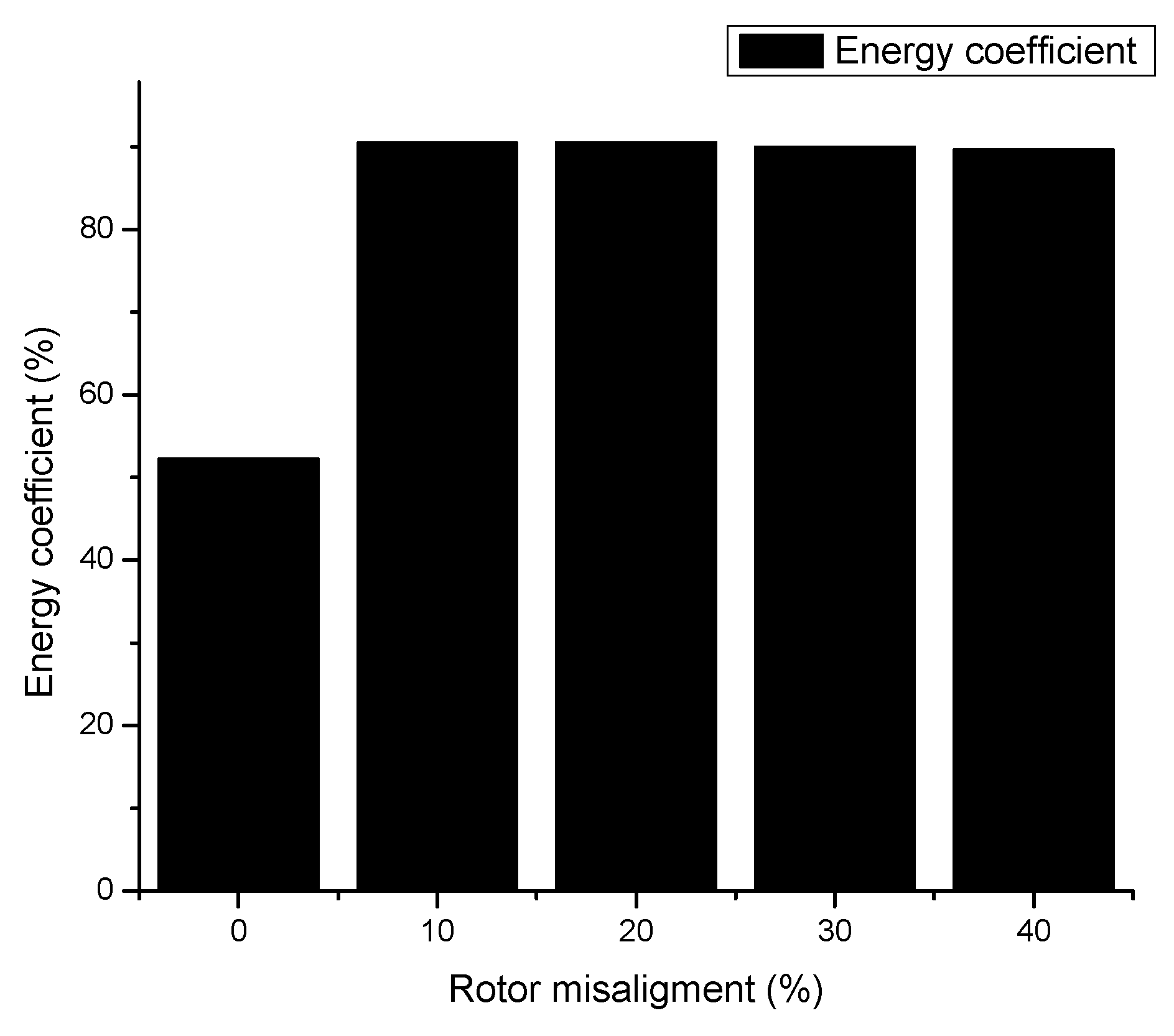
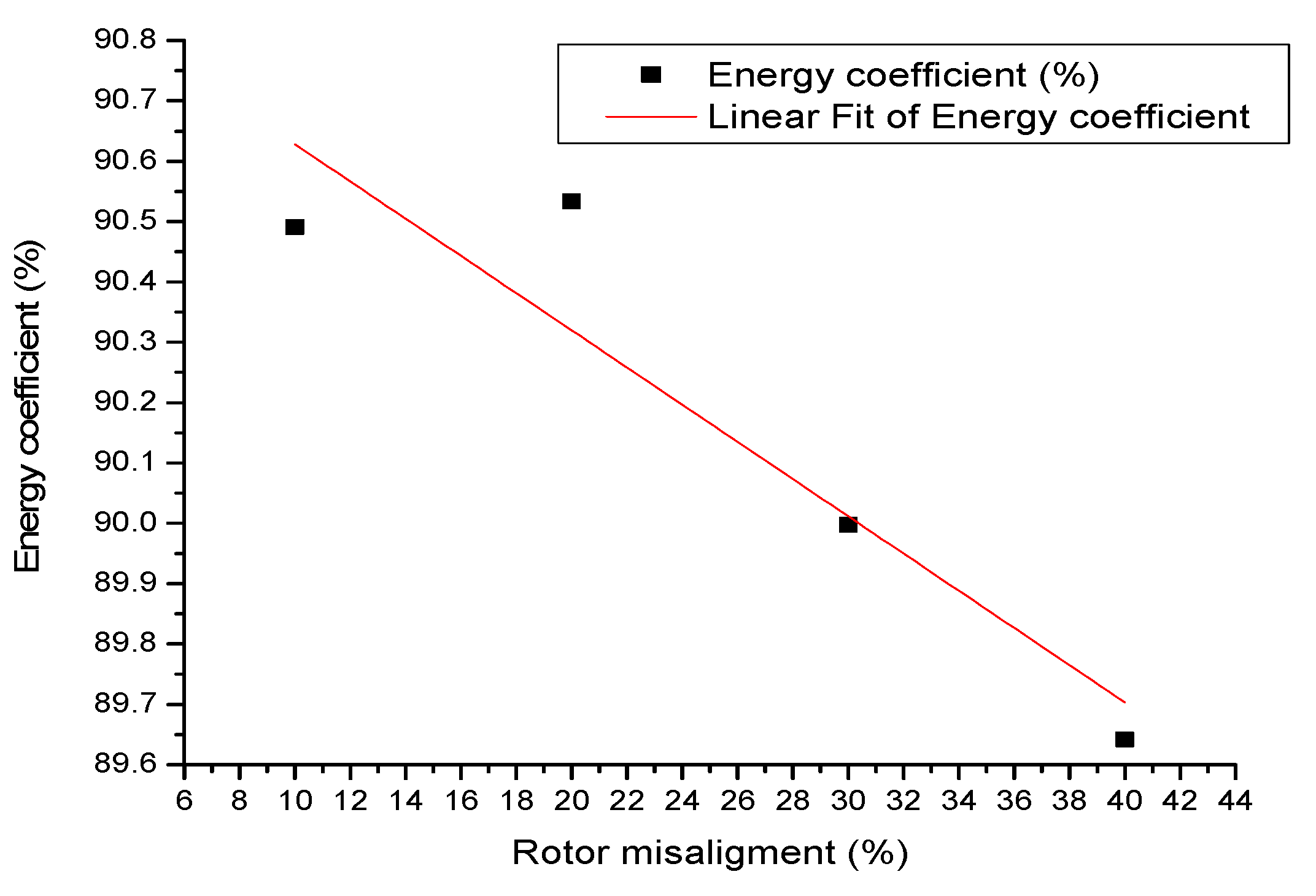
4.2. Analysis Results of the Motor Fault from the Eccentric Rotor Shaft
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hassan, O.E.; Amer, M.; Abdelsalam, A.K.; Williams, B.W. Induction motor broken rotor bar fault detection techniques based on fault signature analysis–a review. IET Electr. Power Appl. 2018, 12, 895–907. [Google Scholar] [CrossRef]
- Guo, H.; Crossman, J.A.; Murphey, Y.L.; Coleman, M. Automotive signal diagnostics using wavelets and machine learning. IEEE Trans. Veh. Technol. 2000, 49, 1650–1662. [Google Scholar]
- Kaikaa, M.Y.; Hadjami, M.; Khezzar, A. Effects of the simultaneous presence of static eccentricity and broken rotor bars on the stator current of induction machine. IEEE Trans. Ind. Electron. 2014, 61, 2452–2463. [Google Scholar] [CrossRef]
- Bonthu, S.S.R.; Tarek, M.T.B.; Islam, M.Z.; Choi, S. Performance analysis of rare-earth and rare-earth free external rotor motors under eccentricity faults. In Proceedings of the 2018 IEEE Applied Power Electronics Conference and Exposition (APEC), San Antonio, TX, USA, 4 March 2018; pp. 2940–2946. [Google Scholar]
- Guo, B.; Huang, Y.; Peng, F.; Dong, J.; Li, Y. Analytical Modeling of Misalignment in Axial Flux Permanent Magnet Machine. IEEE Trans. Ind. Electron. 2020, 67, 4433–4443. [Google Scholar] [CrossRef]
- Stack, J.; Habetler, T.G.; Harley, R.G. Bearing fault detection via autoregressive stator current modelling. IEEE Trans. Ind. Appl. 2004, 40, 740–747. [Google Scholar] [CrossRef]
- Tian, G.Y.; Sophian, A.; Taylor, D.; Rudlin, J. Wavelet-based PCA defect classification and quantification for pulsed eddy current NDT. IEEE Proc. Sci. Meas. Technol. 2005, 152, 141–148. [Google Scholar] [CrossRef]
- Ioannides, M.G. Design and implementation of PLC-based monitoring control system for induction motor. IEEE Trans. Energy Convers. 2004, 19, 469–476. [Google Scholar] [CrossRef]
- Ghosh, A.; Qin, S.; Lee, J.; Wang, G. FBMTP: An Automated Fault and Behavioural Anomaly Detection and Isolation Tool for PLC-Controlled Manufacturing Systems. IEEE Trans. Syst. ManCybern. Syst. 2017, 47, 3397–3417. [Google Scholar] [CrossRef]
- Nandi, S.; Ahmed, S.; Toliyat, H.A. Detection of rotor slot and other eccentricity related harmonics in a three phase induction motor with different rotor cages. IEEE Trans. Energy Convers. 2001, 16, 253–260. [Google Scholar] [CrossRef]
- Sarma, N.; Mohammed, A.; Melecio, J.I.; Tshiloz, K.; Djurović, S. An experimental study of winding fault induced slot harmonic effects in the cage rotor induction machine stator current. In Proceedings of the 8th IET International Conference on Power Electronics, Machines and Drives (PEMD 2016), Glasgow, UK, 19–21 April 2016; pp. 1–6. [Google Scholar]
- Zou, J.; Che, J.; Pu, Y.P.; Zhong, P. On the wavelet time-frequency analysis algorithm in identification of a cracked rotor. J. Strain Anal. Eng. Des. 2002, 37, 239–246. [Google Scholar] [CrossRef]
- Ponci, F.; Monti, A.; Cristaldi, L.; Lazzaroni, M. Diagnostic of a Faulty Induction Motor Drive via Wavelet Decomposition. IEEE Trans. Instrum. Meas. 2007, 56, 2606–2615. [Google Scholar] [CrossRef]
- Khan, M.A.S.K.; Radwan, T.S.; Rahman, M.A. Real-Time Implementation of Wavelet Packet Transform-Based Diagnosis and Protection of Three-Phase Induction Motors. IEEE Trans. Energy Convers. 2007, 22, 647–655. [Google Scholar] [CrossRef]
- Kia, S.H.; Henao, H.; Capolino, G. Diagnosis of Broken-Bar Fault in Induction Machines Using Discrete Wavelet Transform Without Slip Estimation. IEEE Trans. Ind. Appl. 2009, 45, 1395–1404. [Google Scholar] [CrossRef]
- Aktas, M.; Turkmenoglu, V. Wavelet-based switching faults detection in direct torque control induction motor drives. IET Sci. Meas. Technol. 2010, 4, 303–310. [Google Scholar] [CrossRef]
- Pons-Llinares, J.; Antonino-Daviu, J.A.; Riera-Guasp, M.; Pineda-Sanchez, M.; Climente-Alarcon, V. Induction Motor Diagnosis Based on a Transient Current Analytic Wavelet Transform via Frequency B-Splines. IEEE Trans. Ind. Electron. 2011, 58, 1530–1544. [Google Scholar] [CrossRef]
- Mohod, S.; Raut, A. PLC SCADA Based Fault Detection System for Steam Boiler In Remote Plant. In Proceedings of the 2019 2nd International Conference on Intelligent Computing, Instrumentation and Control Technologies (ICICICT), Kannur, India, 5–6 July 2019; pp. 1007–1010. [Google Scholar]
- Lallbeeharry, N.; Mazari, R.; Dégardin, V.; Trebosc, C. PLC applied to fault detection on in-vehicle power line. In Proceedings of the 2018 IEEE International Symposium on Power Line Communications and its Applications (ISPLC), Manchester, UK, 8–11 April 2018; pp. 1–5. [Google Scholar]
- Hu, R.; Wang, J.; Sen, B.; Mills, A.R.; Chong, E.; Sun, Z. PWM Ripple Currents Based Turn Fault Detection for Multiphase Permanent Magnet Machines. IEEE Trans. Ind. Appl. 2017, 53, 2740–2751. [Google Scholar] [CrossRef]
- CusidÓCusido, J.; Romeral, L.; Ortega, J.A.; Rosero, J.A.; Espinosa, A.G. Fault Detection in Induction Machines Using Power Spectral Density in Wavelet Decomposition. IEEE Trans. Ind. Electron. 2008, 55, 633–643. [Google Scholar] [CrossRef]
- The Induction Motor, Y Series IP44 380V Main Parameters: Frame: 80~355. Available online: https://www.motorsimo.com/product/Low_Voltage_AC_Motor/Y_seris_IP44_380V_AC_MOTOR.html (accessed on 18 February 2021).
- Current Transducer, LEN-HX-10NP. Available online: https://datasheetspdf.com/pdf/237133/LEM/HX10-NP/1 (accessed on 18 February 2021).
- Power Meter, RICASSHTM Model: RP-3430 Company Production Information; Sang Chai Meter Co., Ltd.: Bangkok, Thailand, 2020; Available online: http://www.factoryeasy.com (accessed on 18 February 2021).
- The Dial Gauge. FISSO Ref: LS30.10. Available online: https://www.engineering-gauge.co.uk/products/fisso-base-line-model-ls30-f-m-gauging-arm (accessed on 18 February 2021).
- The USB-6008 DAQ Device Measurements. Available online: https://www.ni.com/en-th/support/model.usb-6008.html (accessed on 18 February 2021).
- Zhang, S.; Yanhuai, Q.; Qingkai, H. Fault Characteristics Analysis for Rotor System with Misalignment Base on Wavelet Packet Decomposition and Frequency band Energy Ratio Analysis. In Proceedings of the 30th Chinese Control Conference, Yantai, Chaina, 22–24 July 2011; pp. 4431–4435. [Google Scholar]
- Biju, K.J.G. Fault Detection of Induction Motor using Energy and Wavelet. In Proceedings of the International Conference on Control Communication and Power Engineering (CCPE 2010), Chennai, India, 28–29 July 2010; pp. 210–214. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Power | 11 kW |
| Voltage | 380V |
| Ampere | 20A |
| Power factor | 0.8 |
| Rotor speed | 1450 rpm |
| Air gap | 0.5 mm |
| Energy Signal | Coefficient |
|---|---|
| Ea | 52.2548 |
| Ed1 | 0.0302 |
| Ed2 | 0.2859 |
| Ed3 | 9.1370 |
| Ed4 | 38.2919 |
| Etotal | 100 |
| Parameter Energy Coefficient | Motor Normal Condition | Motor Installation Misalignment | |||
|---|---|---|---|---|---|
| 0% | 10% | 20% | 30% | 40% | |
| Ea | 52.2548 | 90.4908 | 90.5329 | 89.9976 | 89.6416 |
| Ed1 | 0.0303 | 0.0025 | 0.0025 | 0.0020 | 0.0019 |
| Ed2 | 0.2859 | 0.1586 | 0.1586 | 0.0927 | 0.1042 |
| Ed3 | 9.1370 | 0.27690 | 0.2690 | 0.2637 | 0.3154 |
| Ed4 | 38.2919 | 9.1685 | 9.0370 | 9.6441 | 9.9369 |
| Etotal | 100 | 100 | 100 | 100 | 100 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Prainetr, S.; Tunyasrirut, S.; Wangnipparnto, S. Testing and Analysis Fault of Induction Motor for Case Study Misalignment Installation Using Current Signal with Energy Coefficient. World Electr. Veh. J. 2021, 12, 37. https://doi.org/10.3390/wevj12010037
Prainetr S, Tunyasrirut S, Wangnipparnto S. Testing and Analysis Fault of Induction Motor for Case Study Misalignment Installation Using Current Signal with Energy Coefficient. World Electric Vehicle Journal. 2021; 12(1):37. https://doi.org/10.3390/wevj12010037
Chicago/Turabian StylePrainetr, Supachai, Satean Tunyasrirut, and Santi Wangnipparnto. 2021. "Testing and Analysis Fault of Induction Motor for Case Study Misalignment Installation Using Current Signal with Energy Coefficient" World Electric Vehicle Journal 12, no. 1: 37. https://doi.org/10.3390/wevj12010037
APA StylePrainetr, S., Tunyasrirut, S., & Wangnipparnto, S. (2021). Testing and Analysis Fault of Induction Motor for Case Study Misalignment Installation Using Current Signal with Energy Coefficient. World Electric Vehicle Journal, 12(1), 37. https://doi.org/10.3390/wevj12010037