Innovative and Highly Integrated Modular Electric Drivetrain

 , , ,
, , ,
Abstract
:1. Introduction
2. Results
2.1. Permanent Magnet Hybrid Synchronous Machine
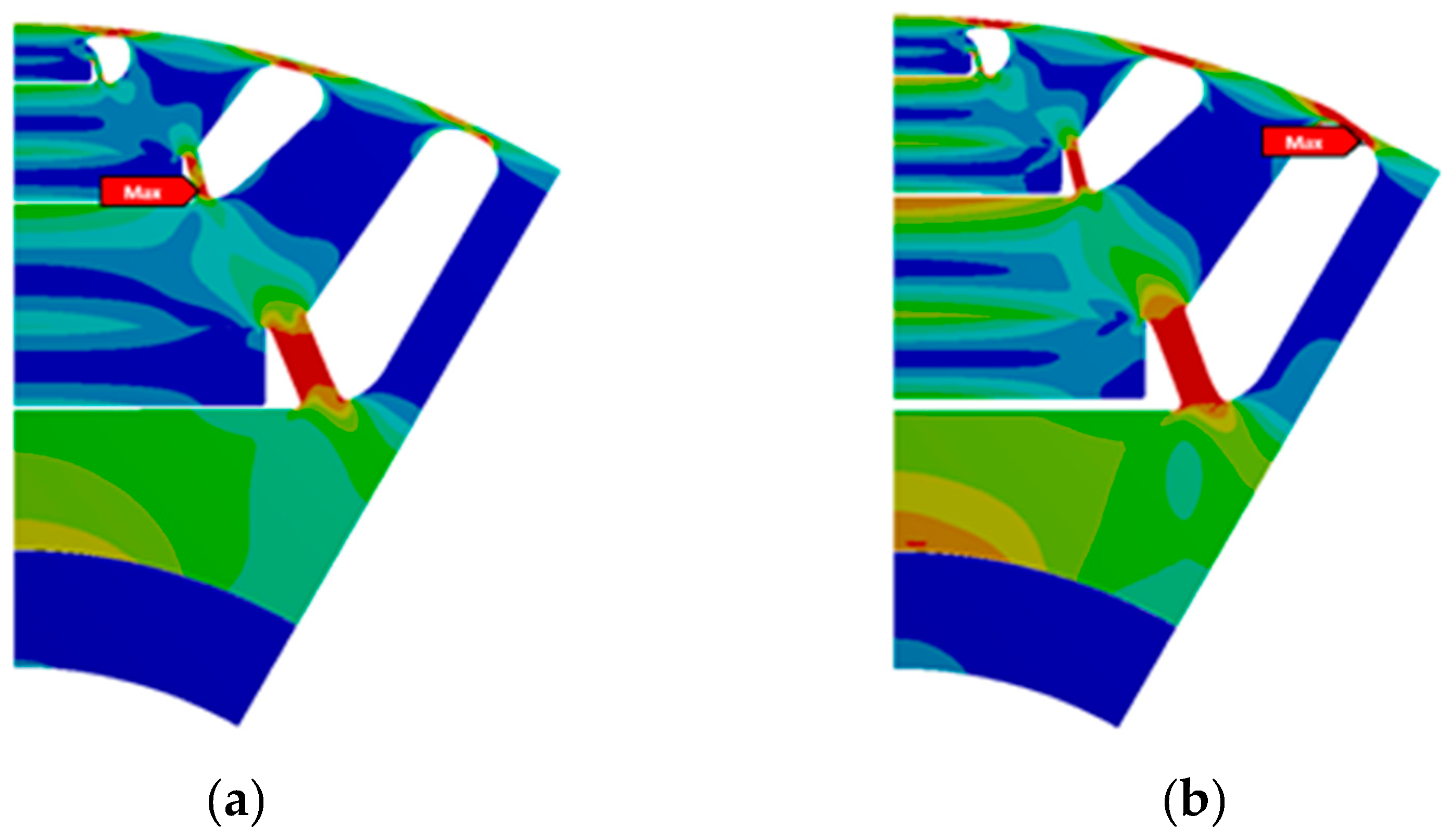
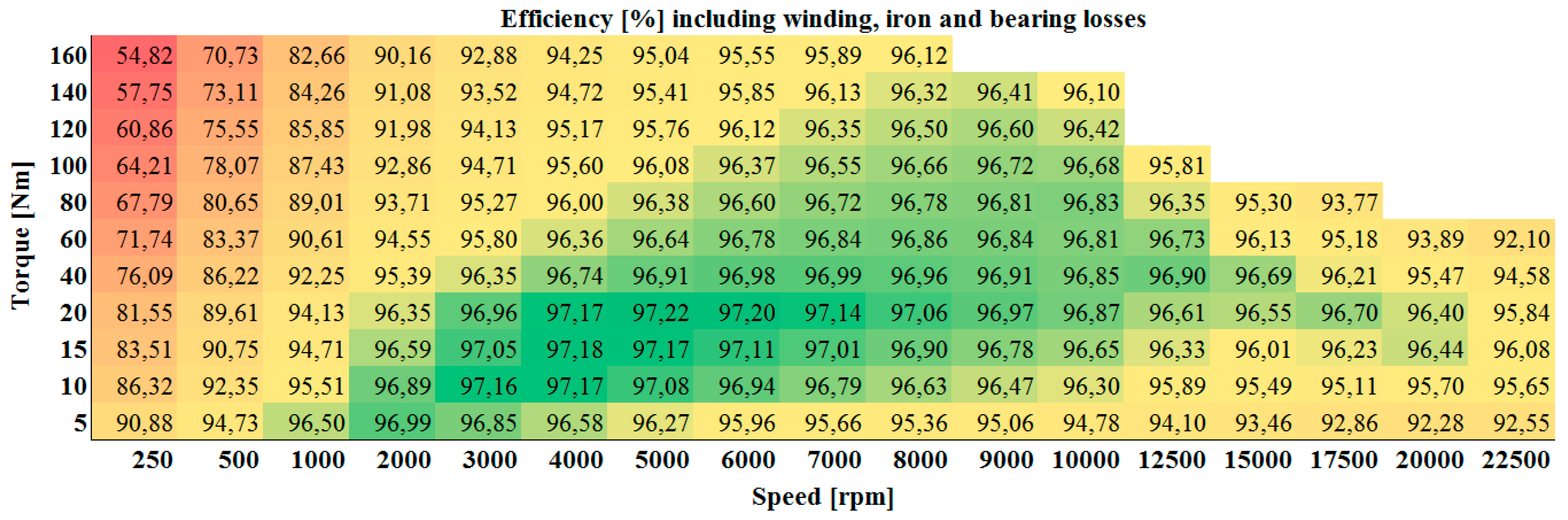
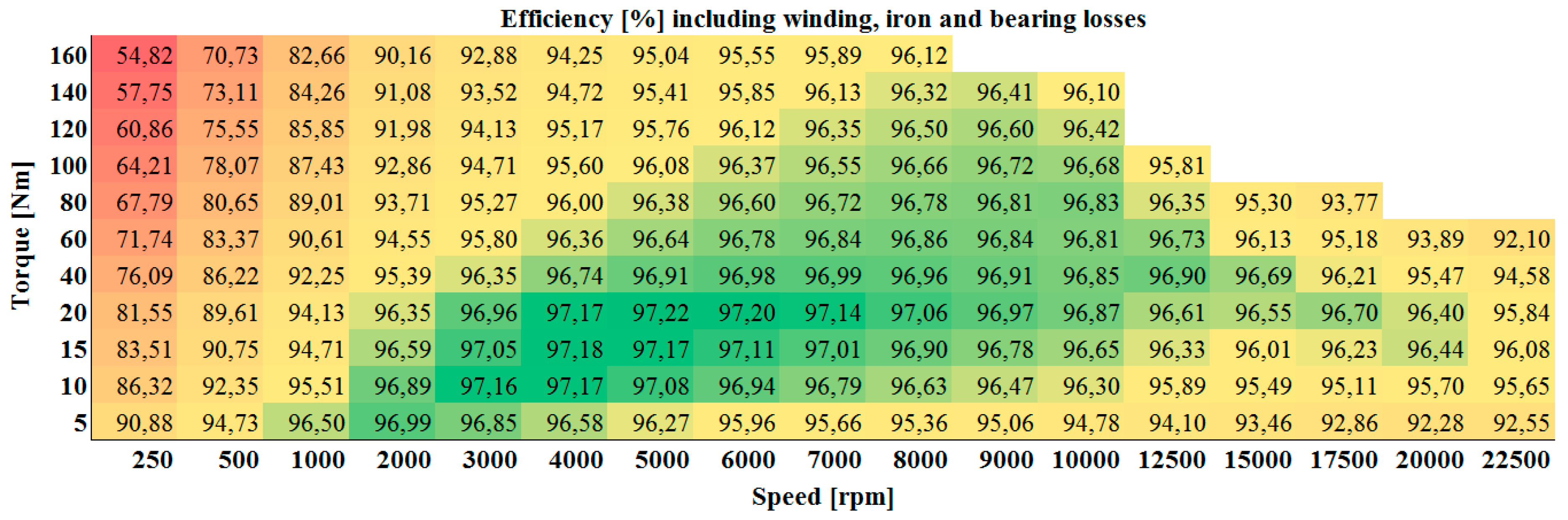
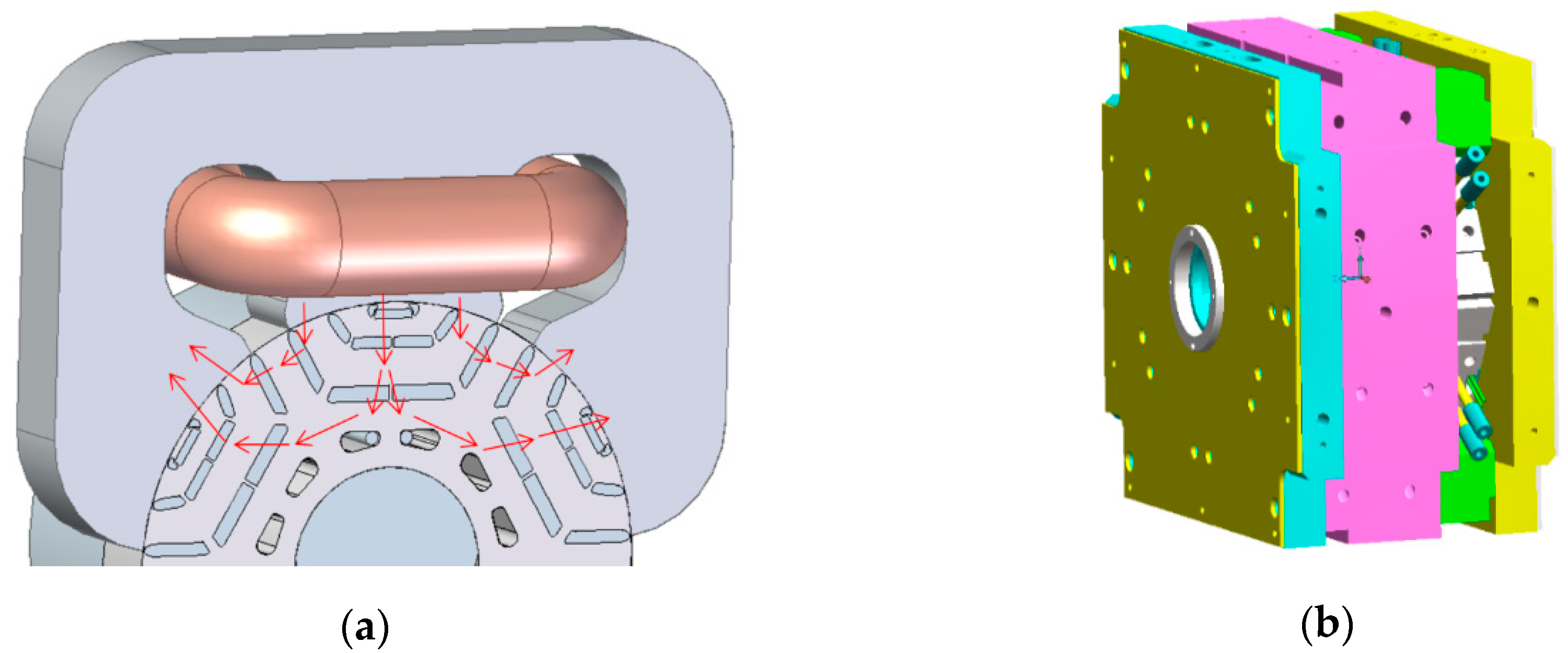
2.1.1. Machine Design
- -
- Since the current capability of the gallium nitride inverter is expected to be low, the missing torque through current must be compensated by highest power magnets.
- -
- Due to the high speeds of the rotor, the small rotor cross section does not provide sufficient space to design a mechanically stable rotor with a high mass of ferrite magnets (which would be needed in order to produce the same air gap flux as with NdFeB magnets).
- -
- Ferrite magnets of currently available grades are not sufficiently safe against demagnetization.
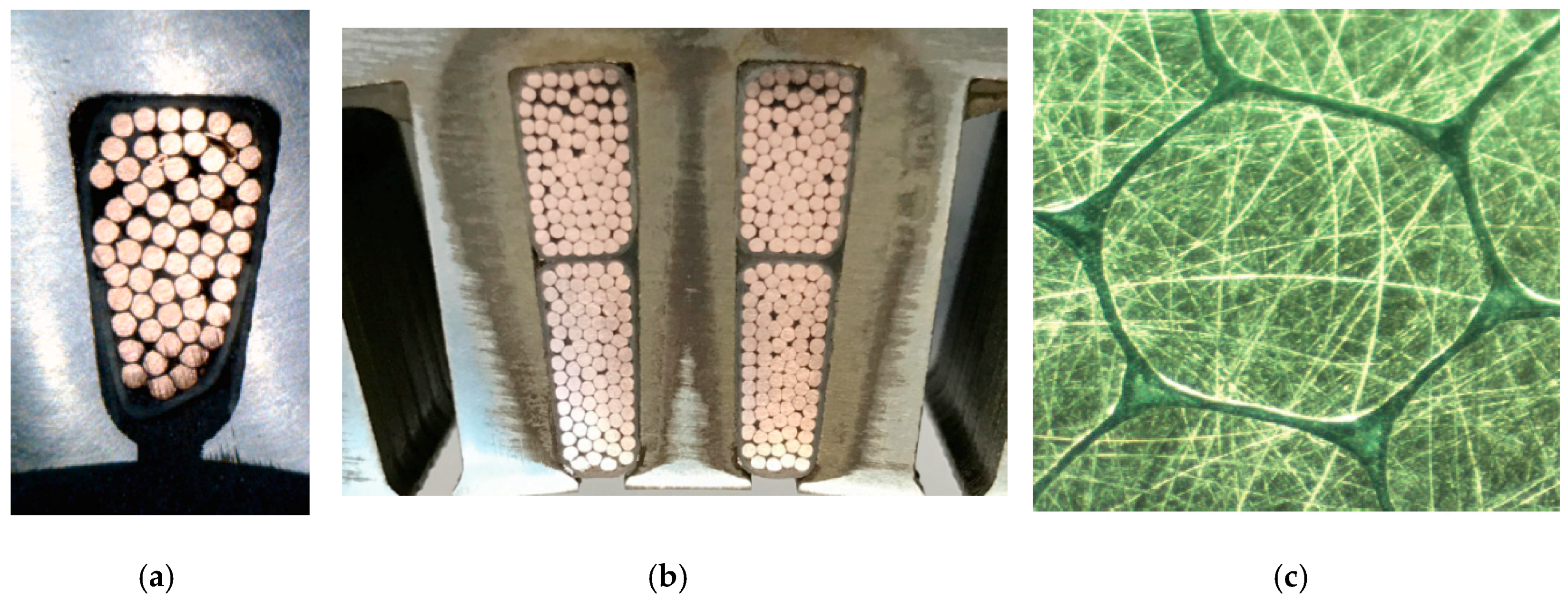
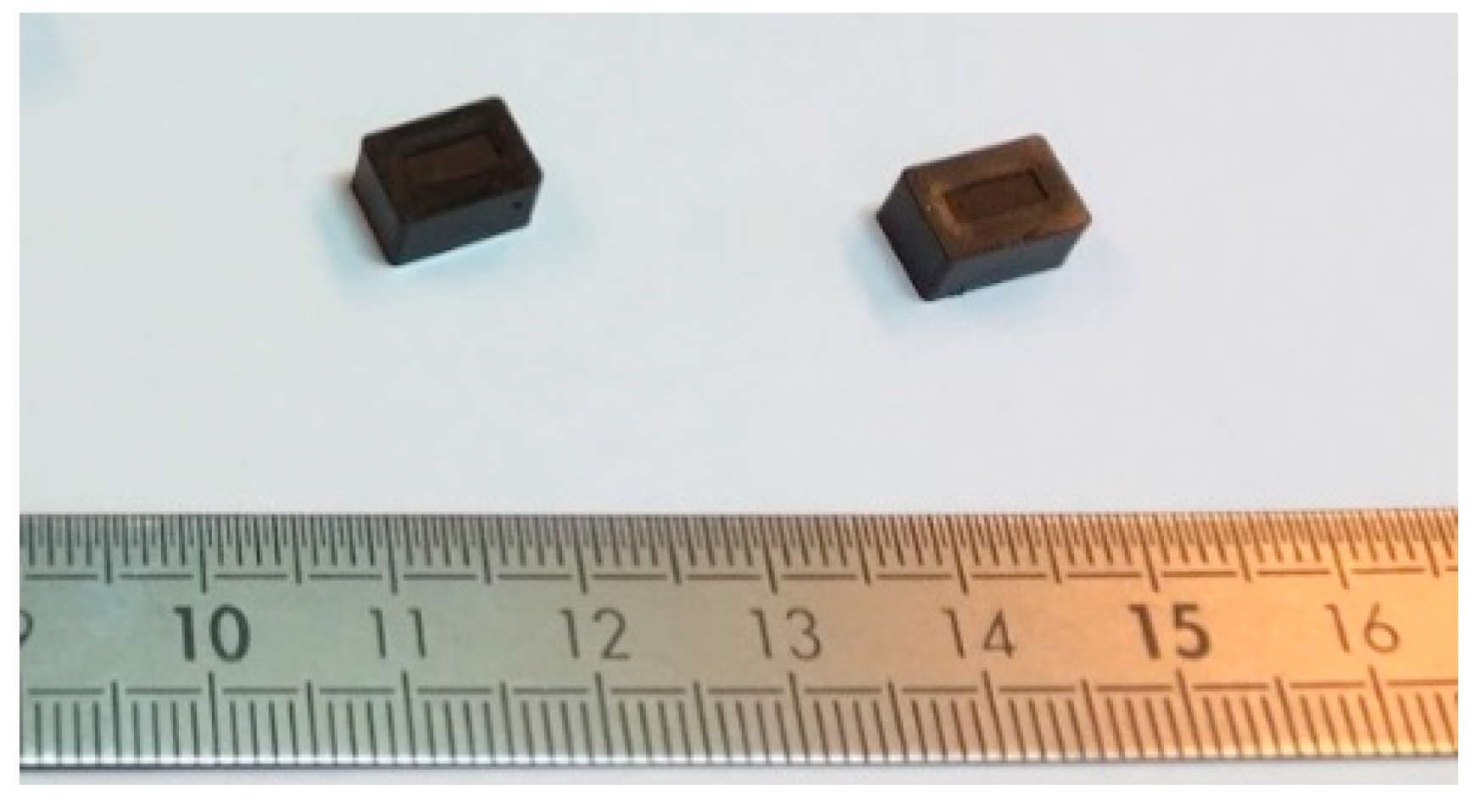
2.1.2. Magnet Injection Moulding
2.2. GaN Inverter
2.2.1. Advantages of Gallium Nitride Devices
- an unrivalled switching performance with switching on/off in less than 10 ns,
- a low package inductance,
- a low on-resistance
- and reduced switching losses: five times better than Si devices and two times better than SiC devices.
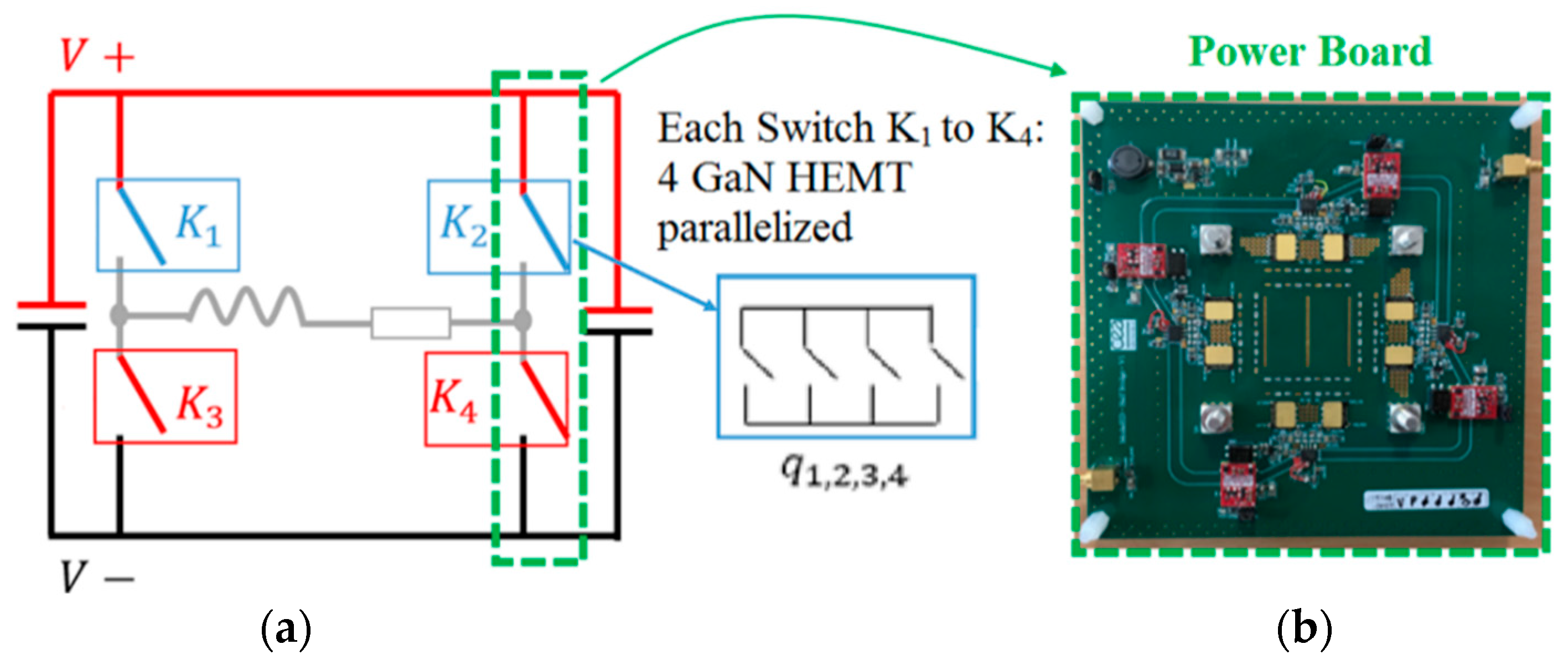
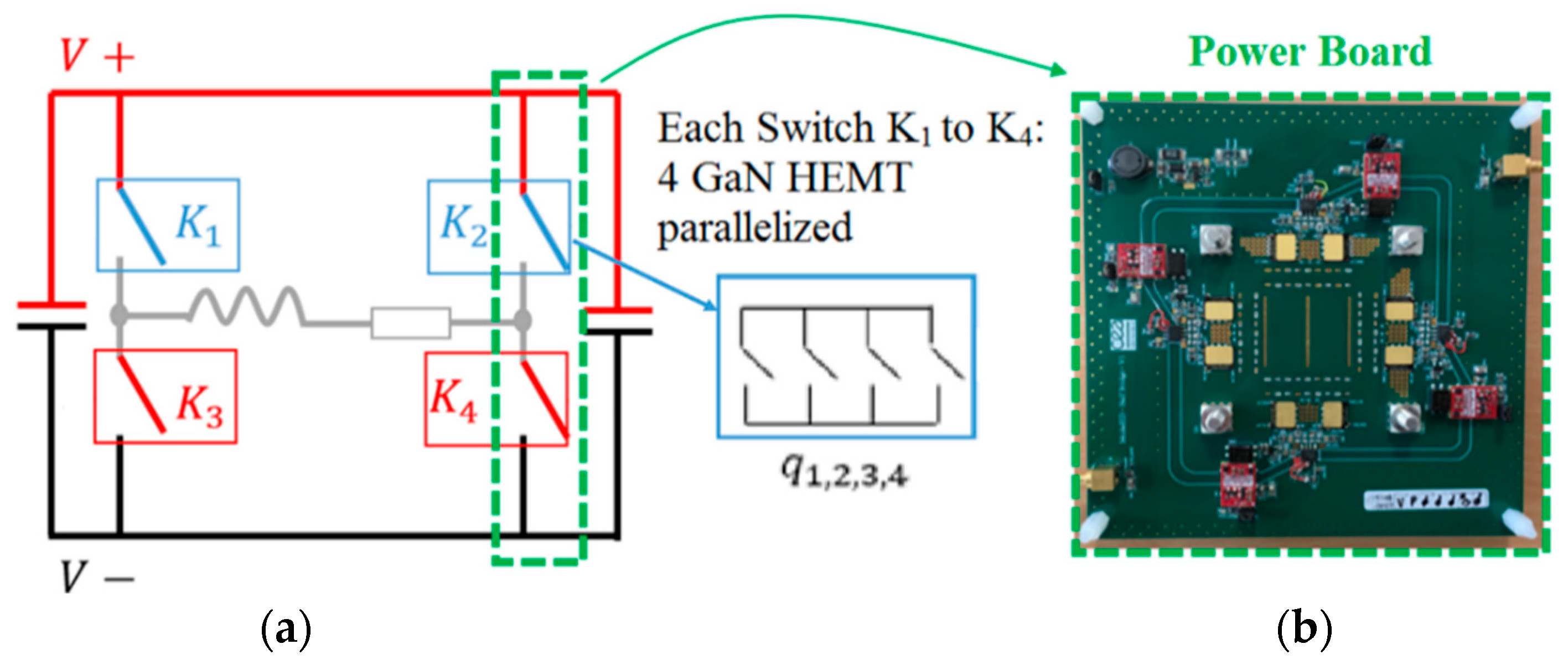
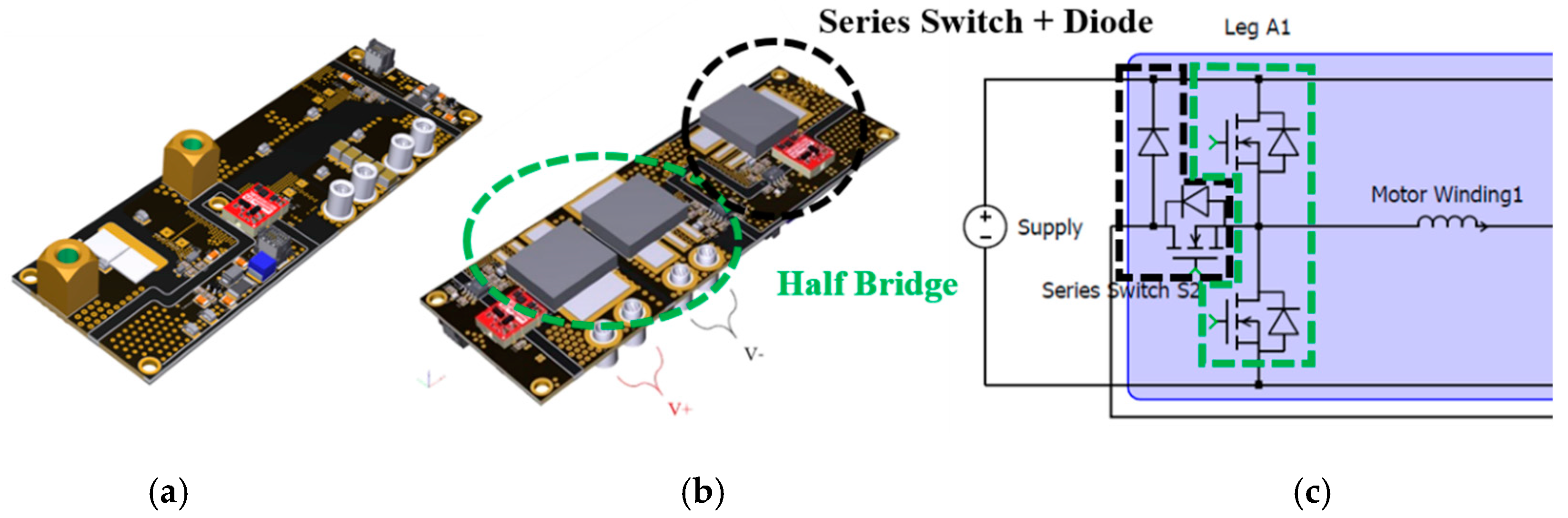
2.2.2. GaN Power Board Conception
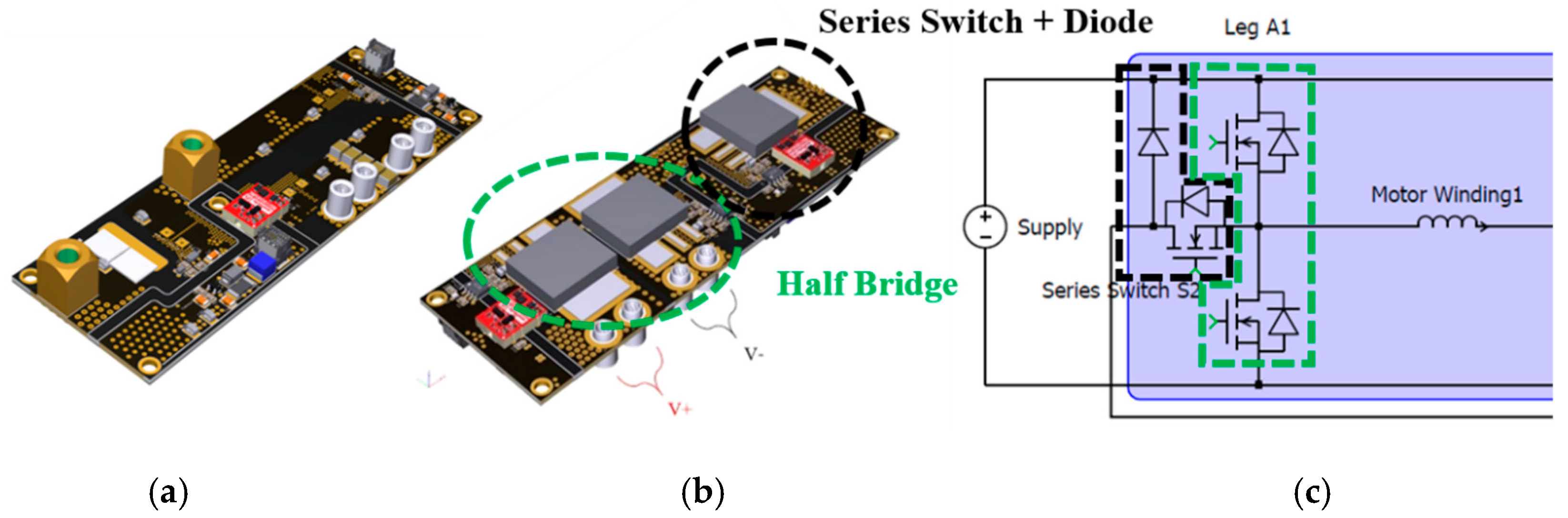
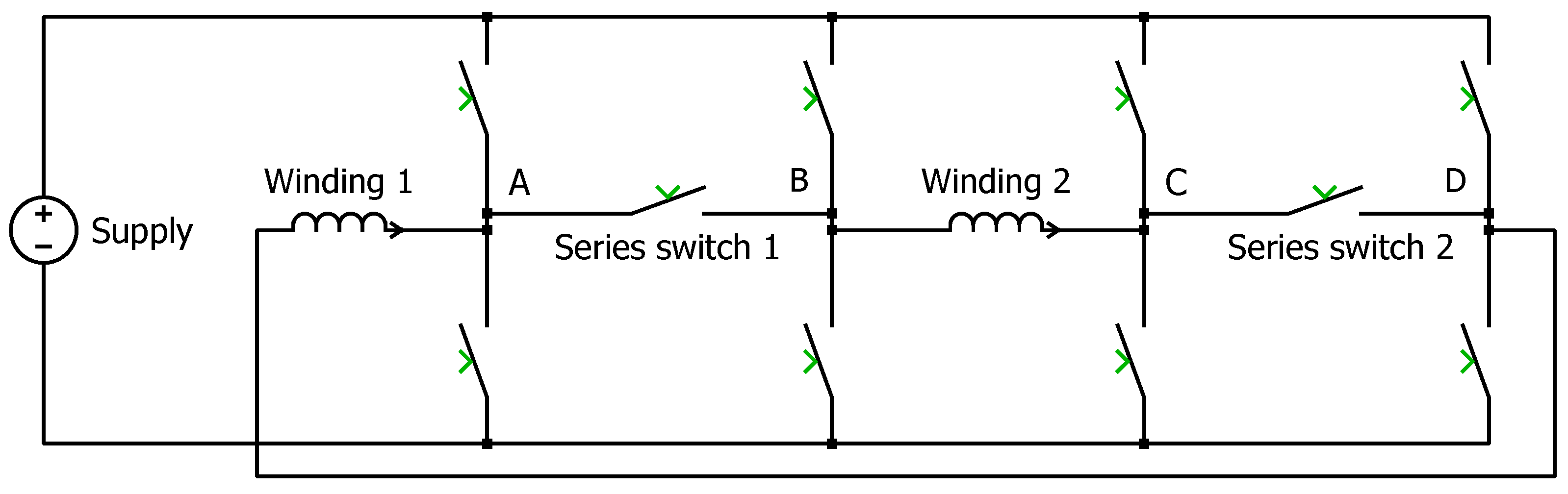
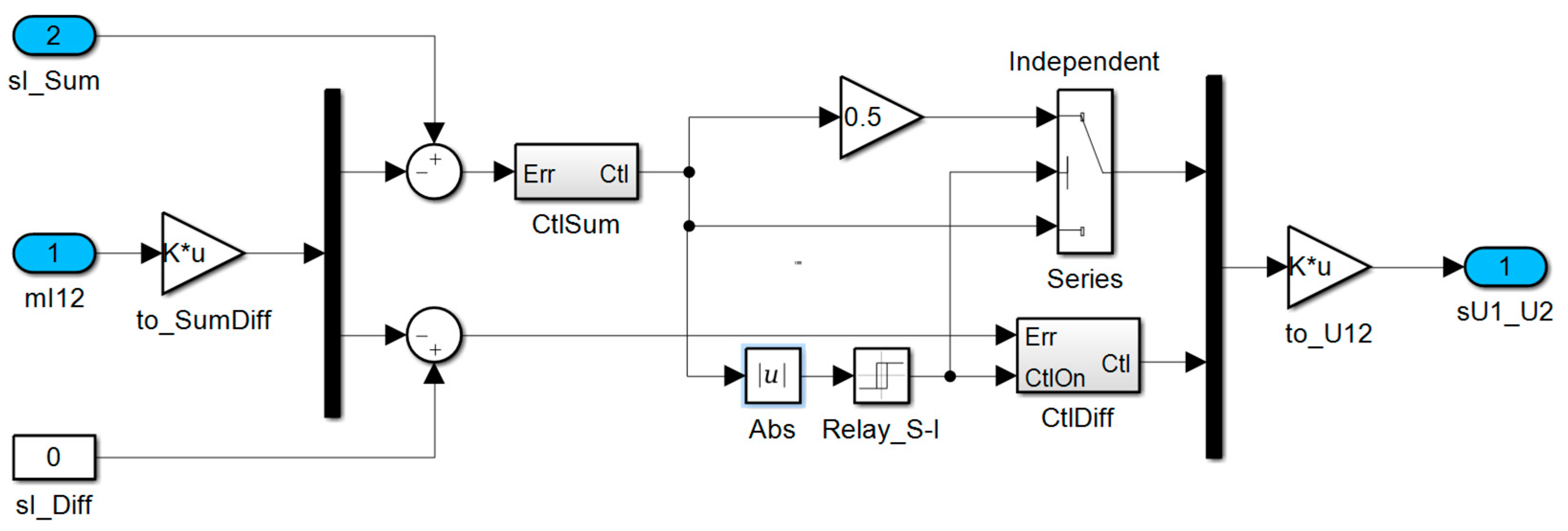
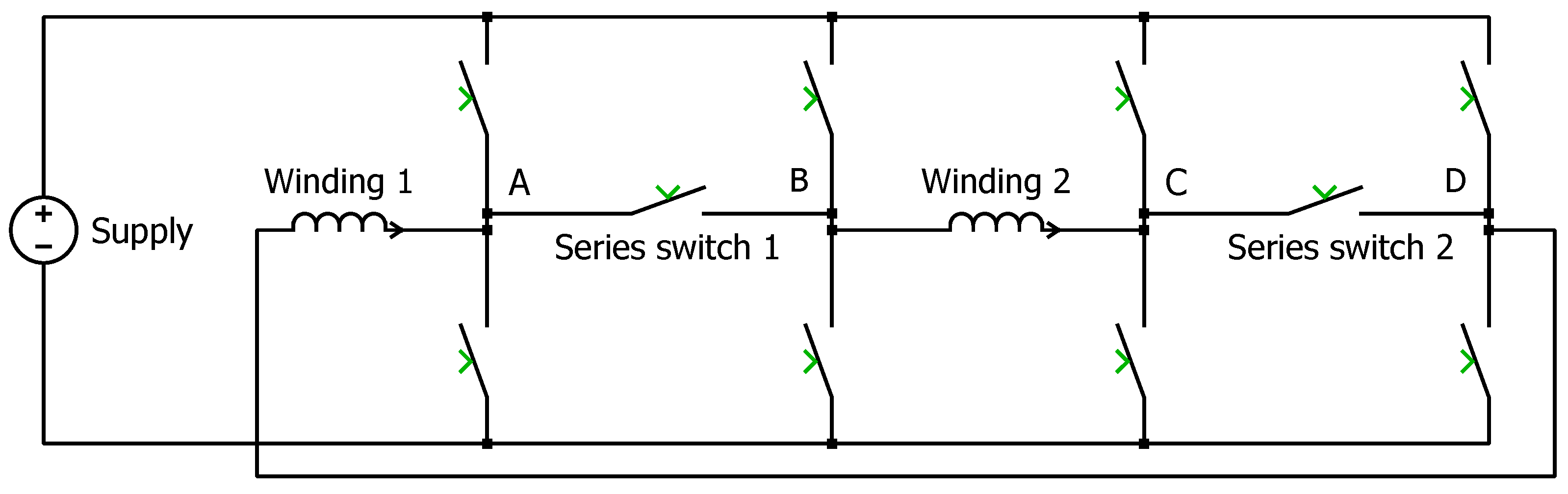
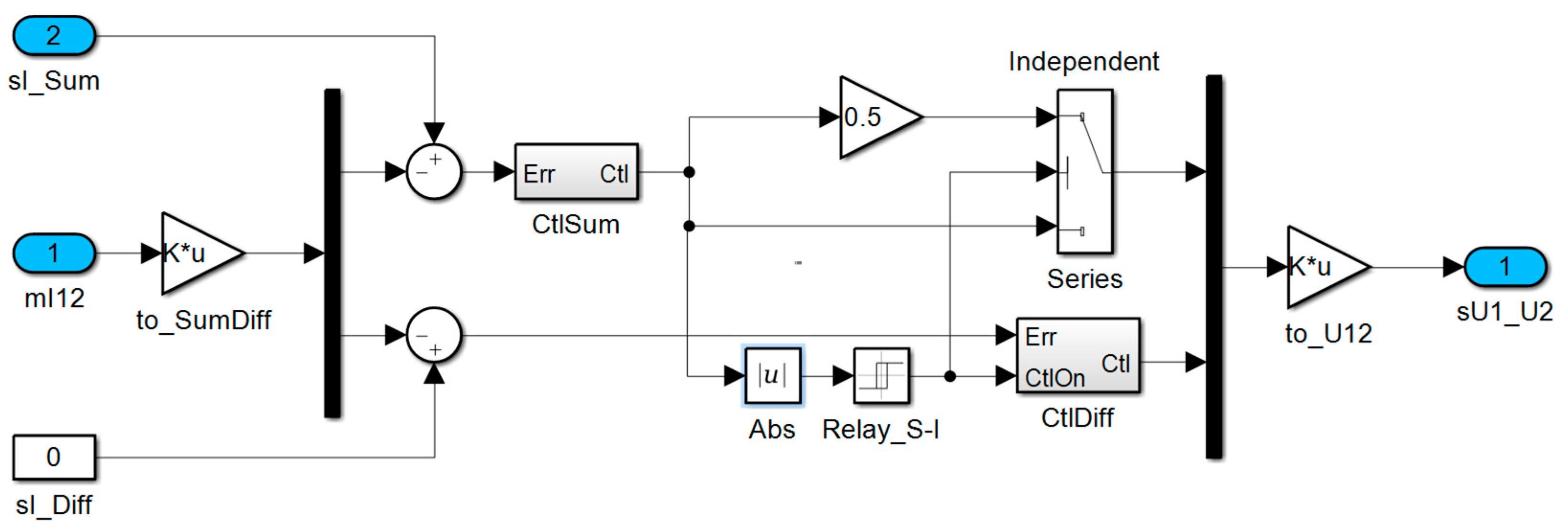
2.2.3. Series-independent Winding Reconfiguration
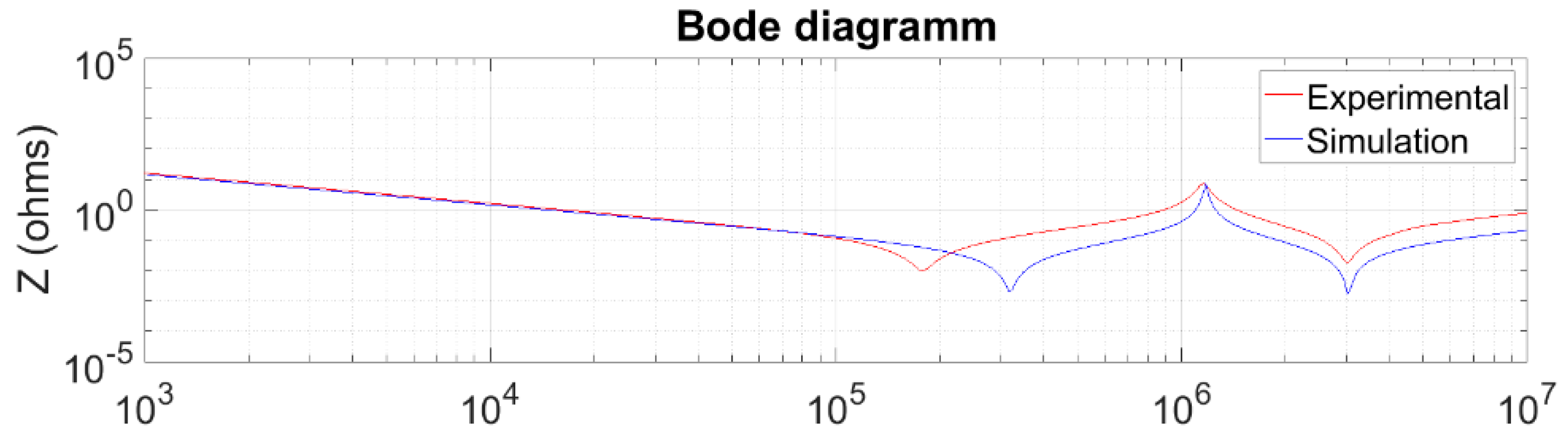
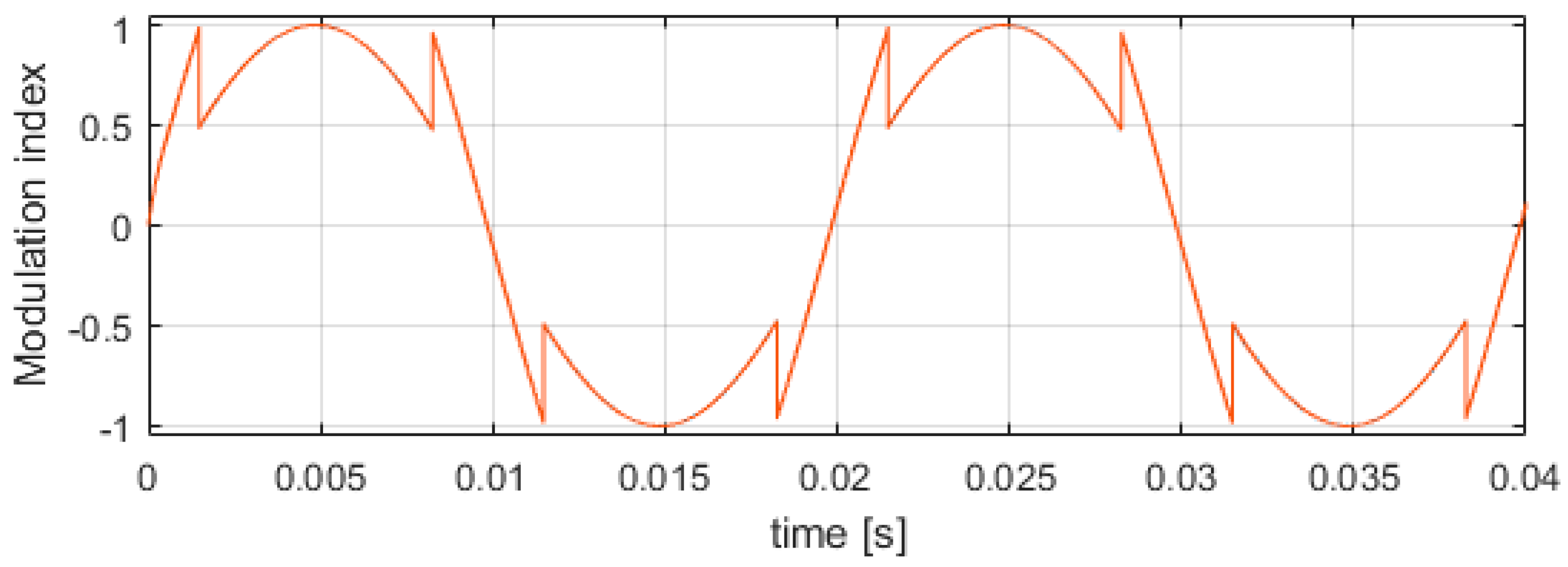
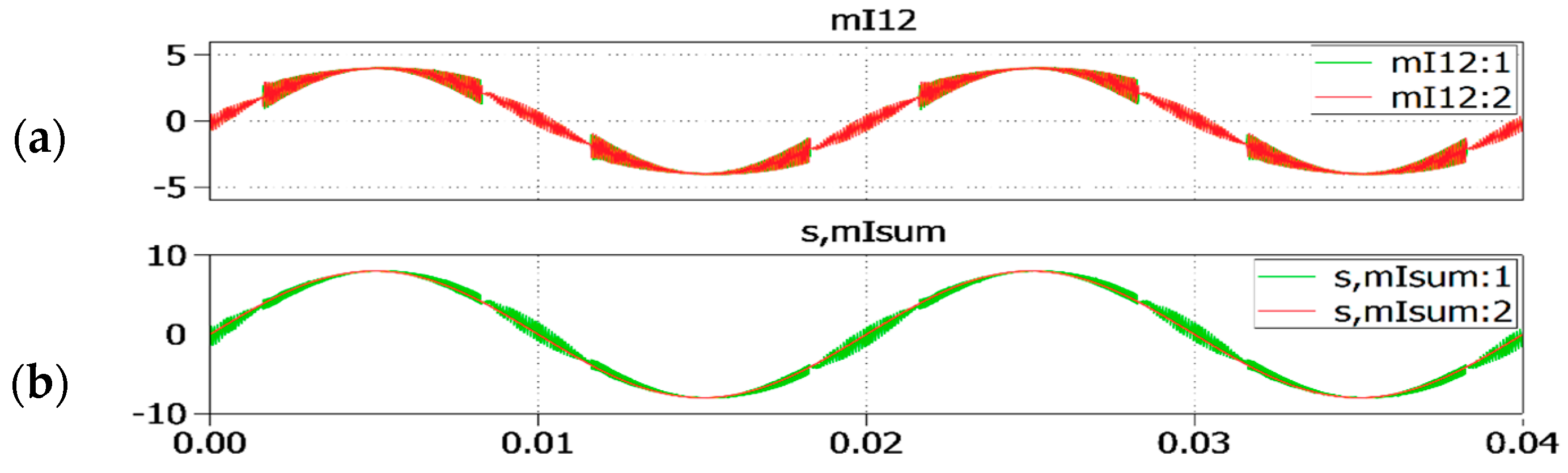
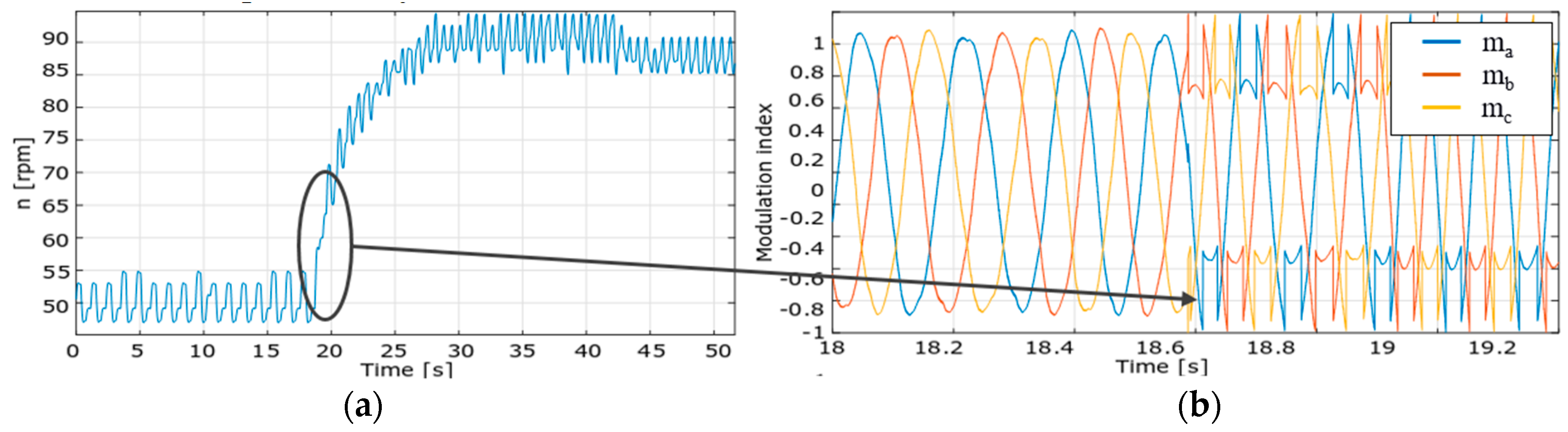
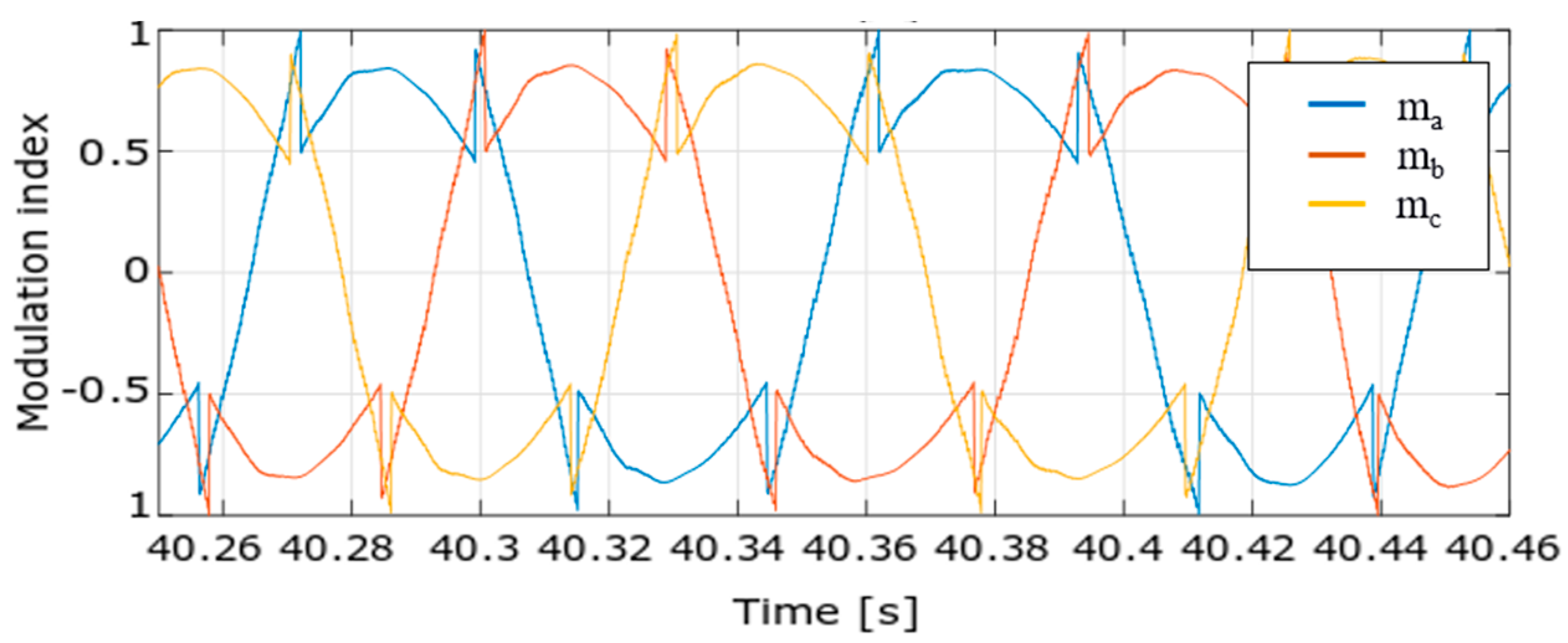
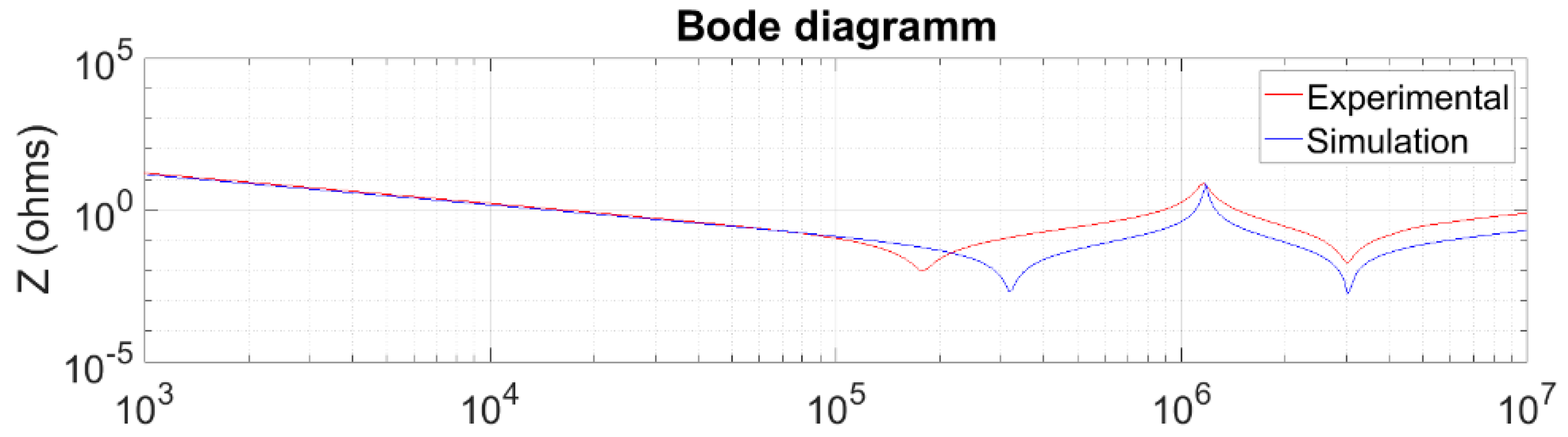
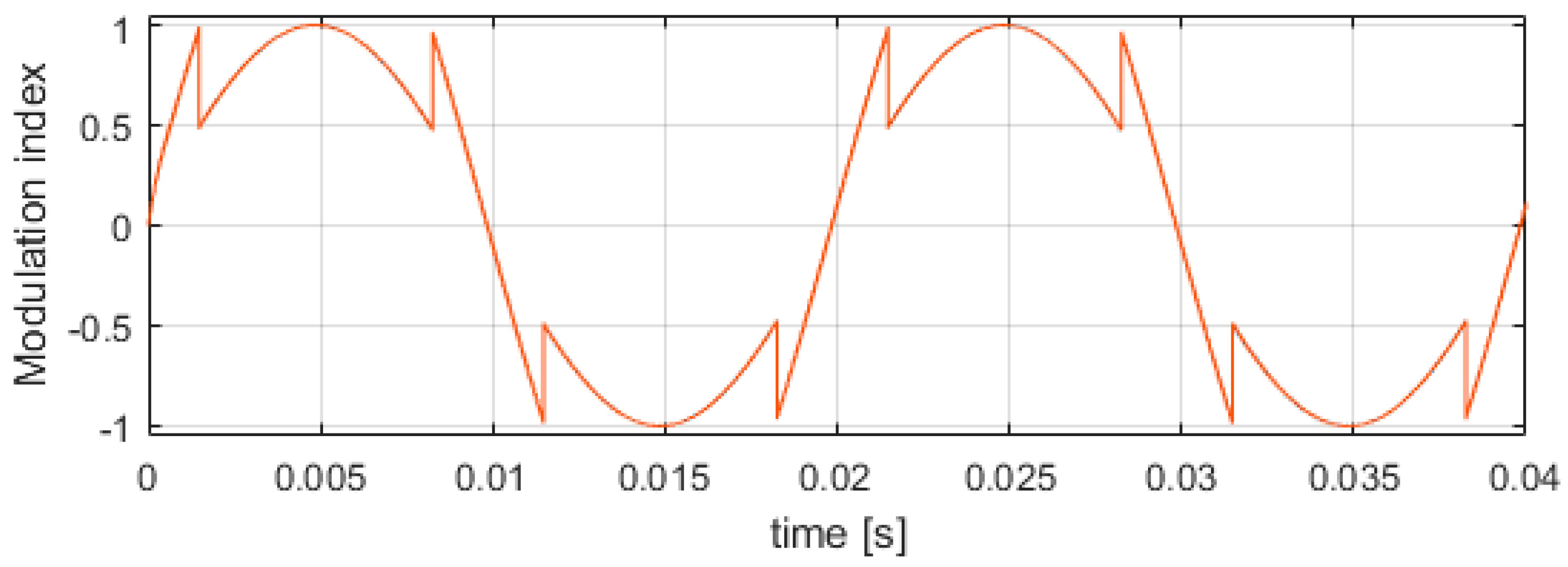
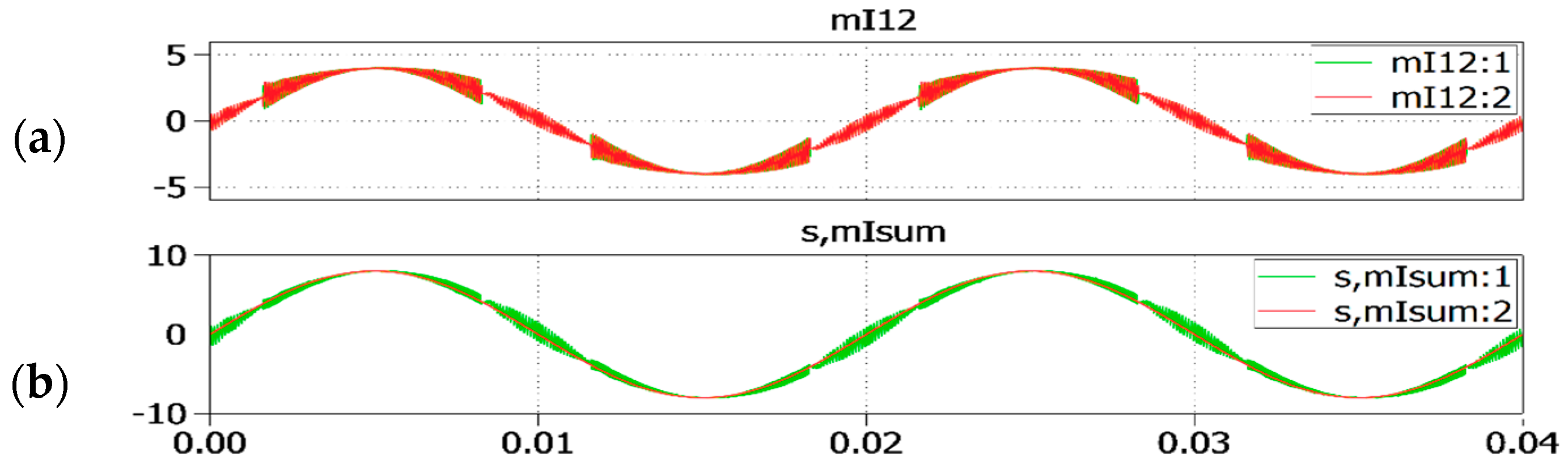
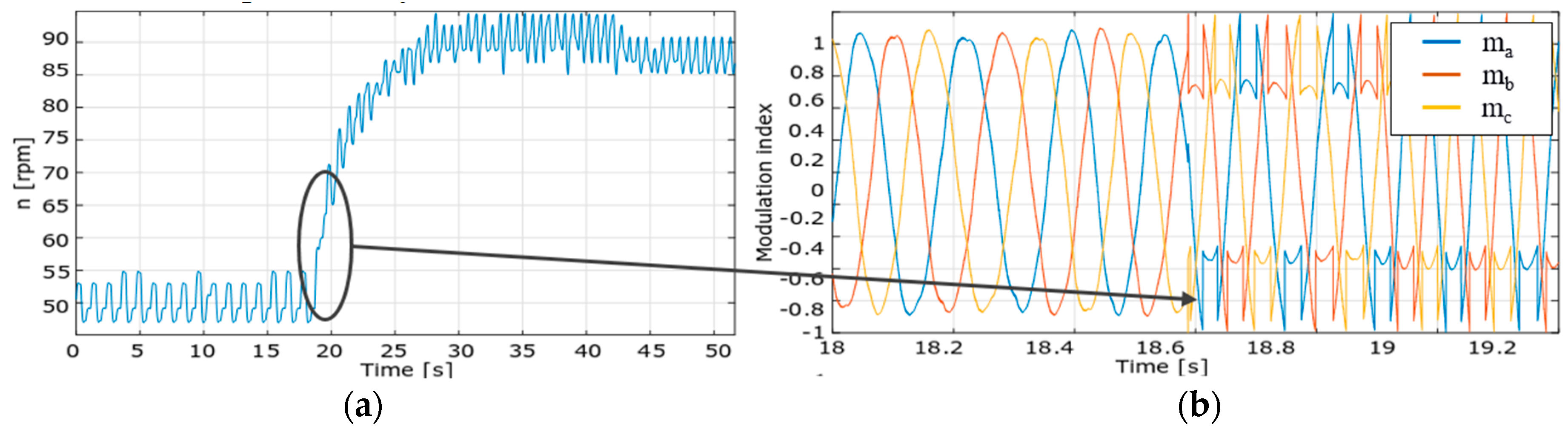
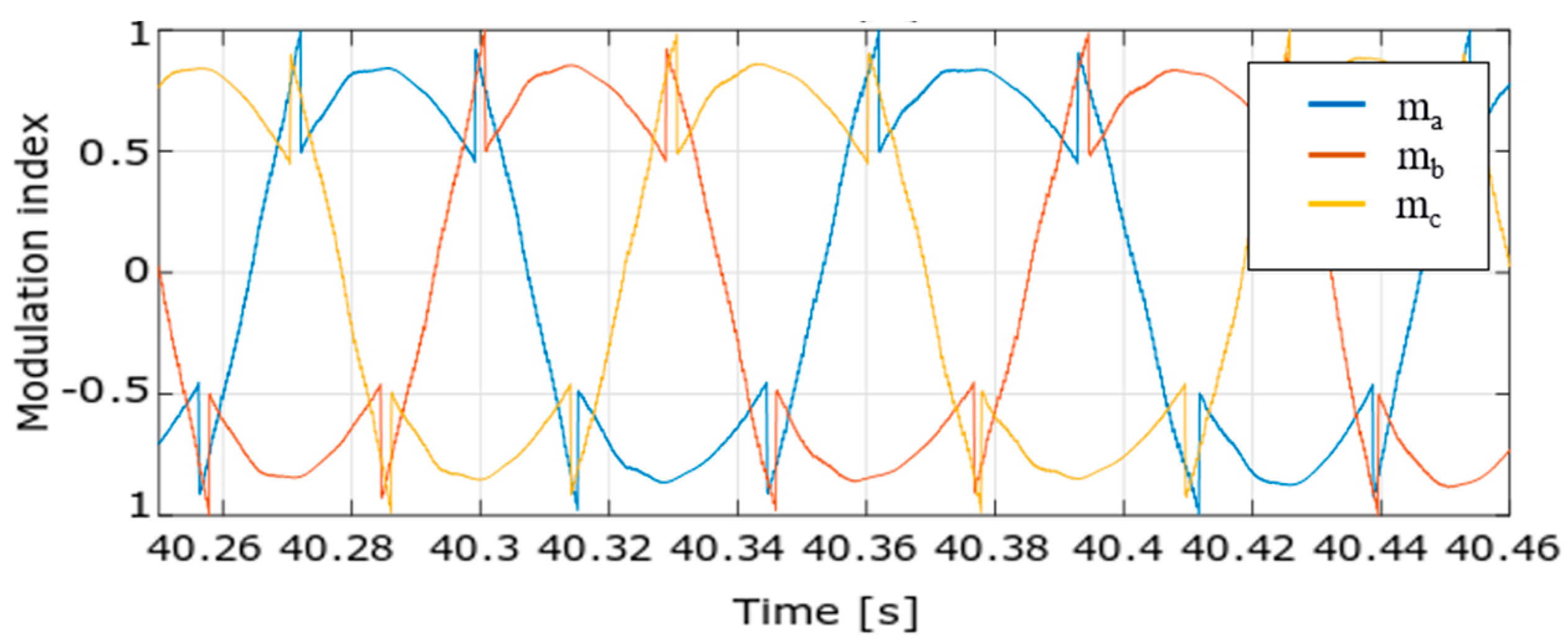
2.2.4. Simulation Results of Winding Reconfiguration
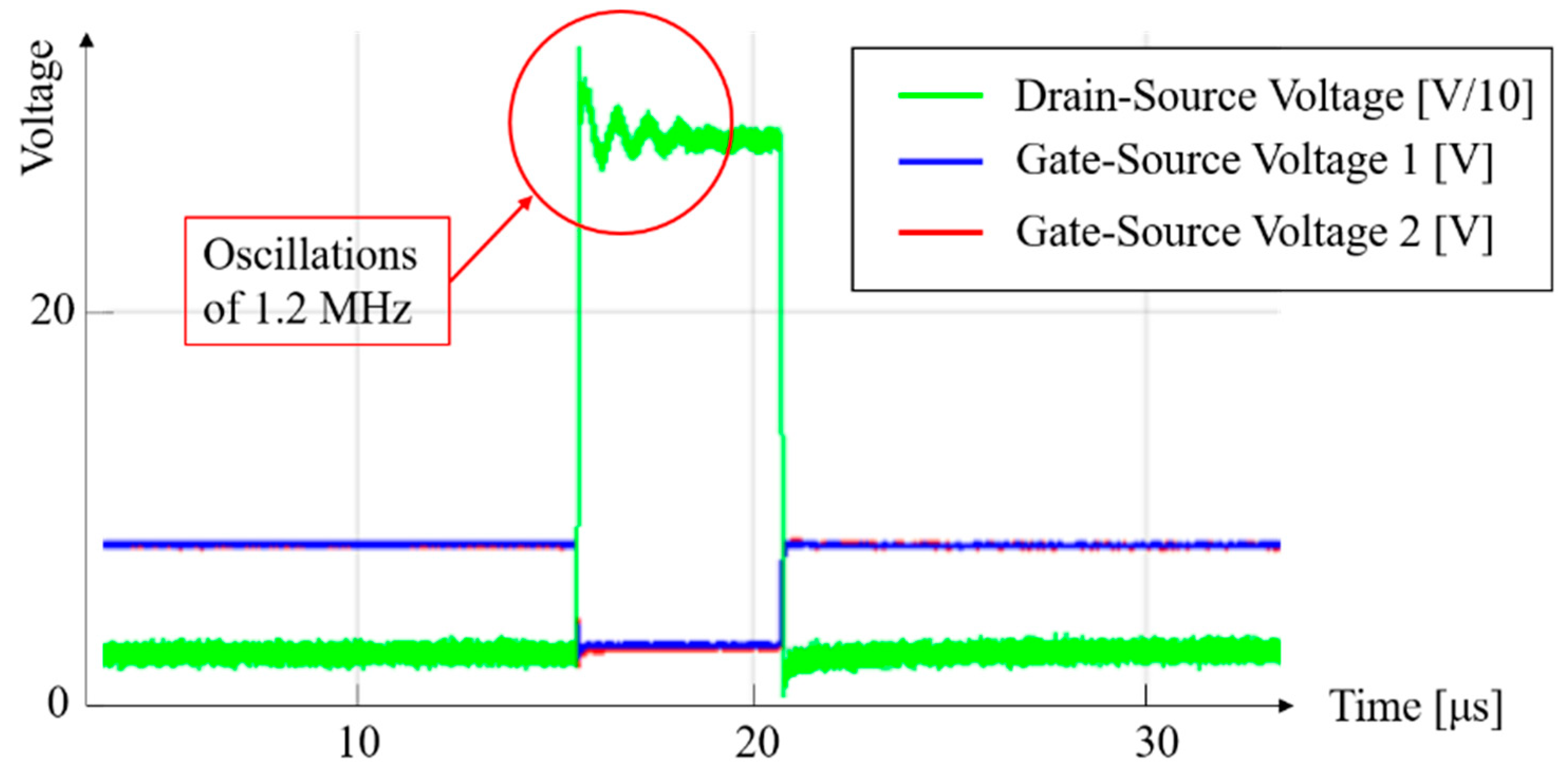
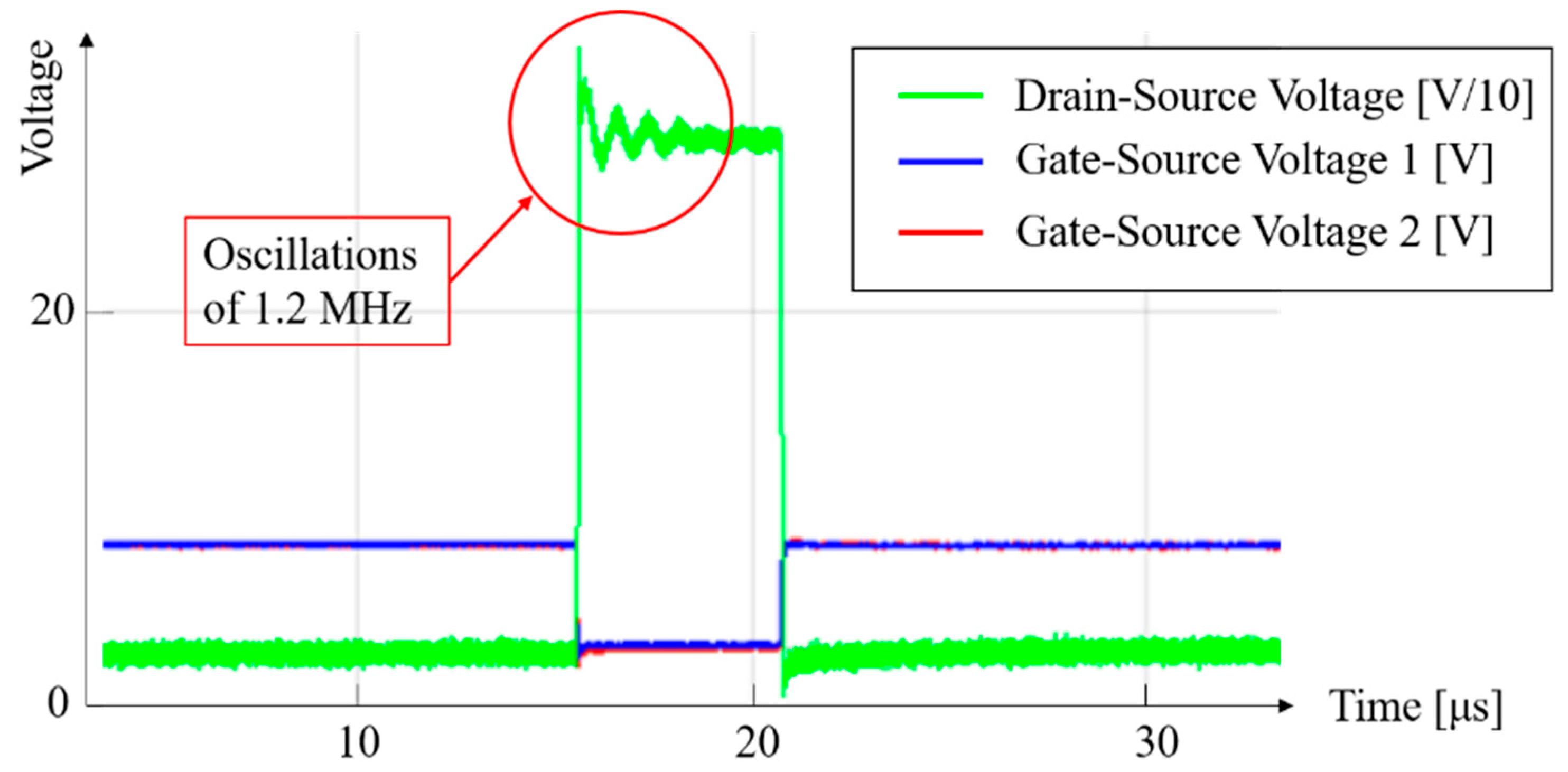
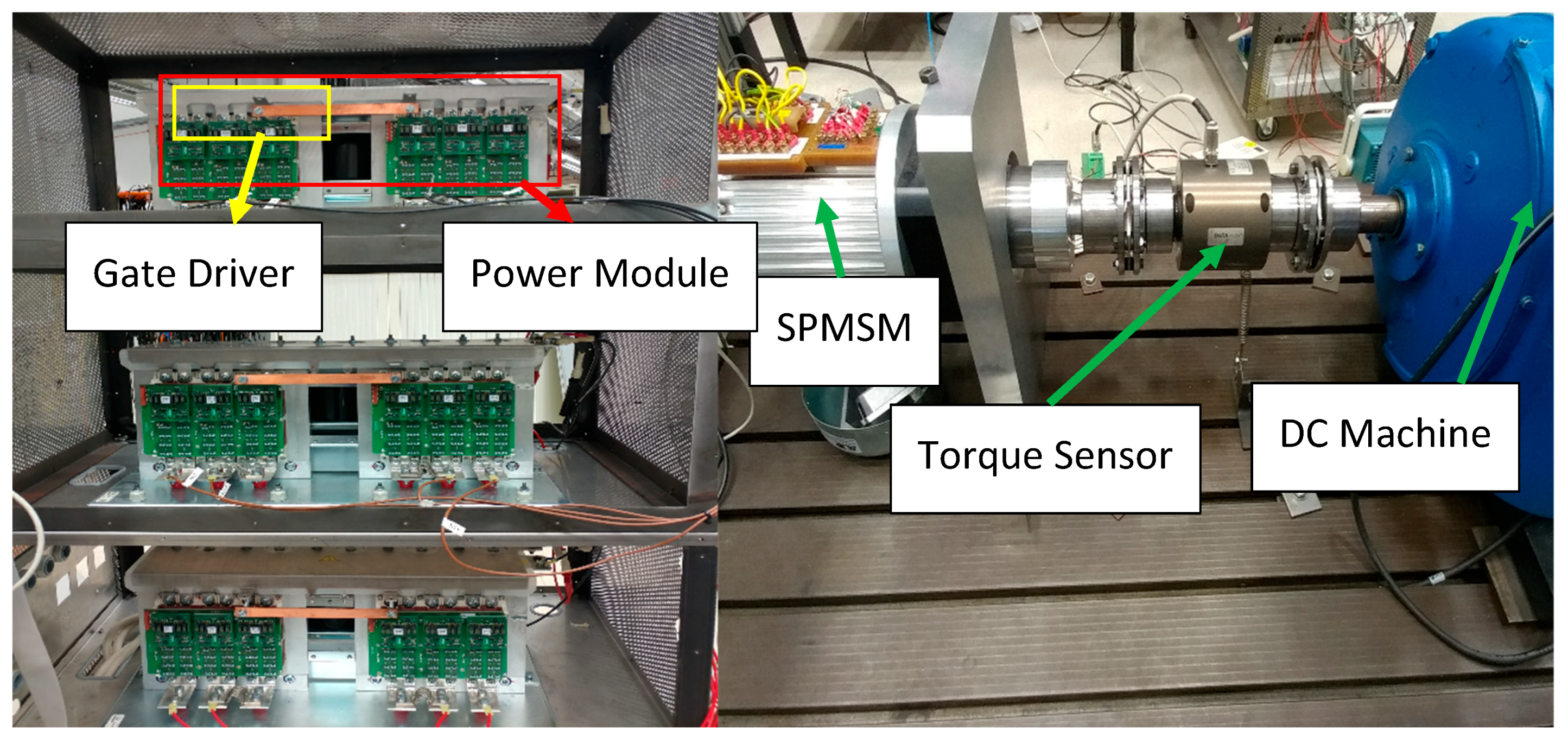
2.2.5. Experimental Results of Winding Reconfiguration.
2.2.6. Industrialization Potential of GaN Devices
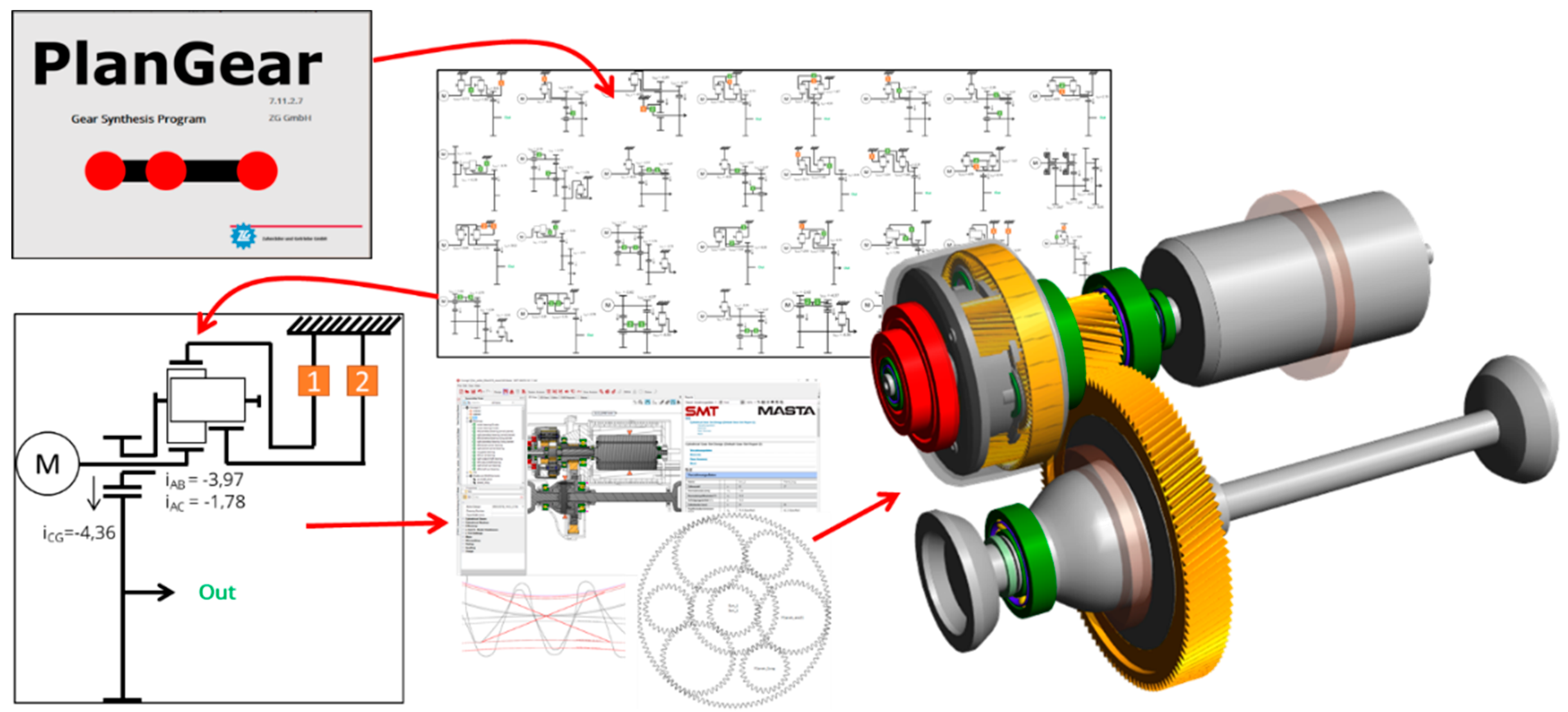
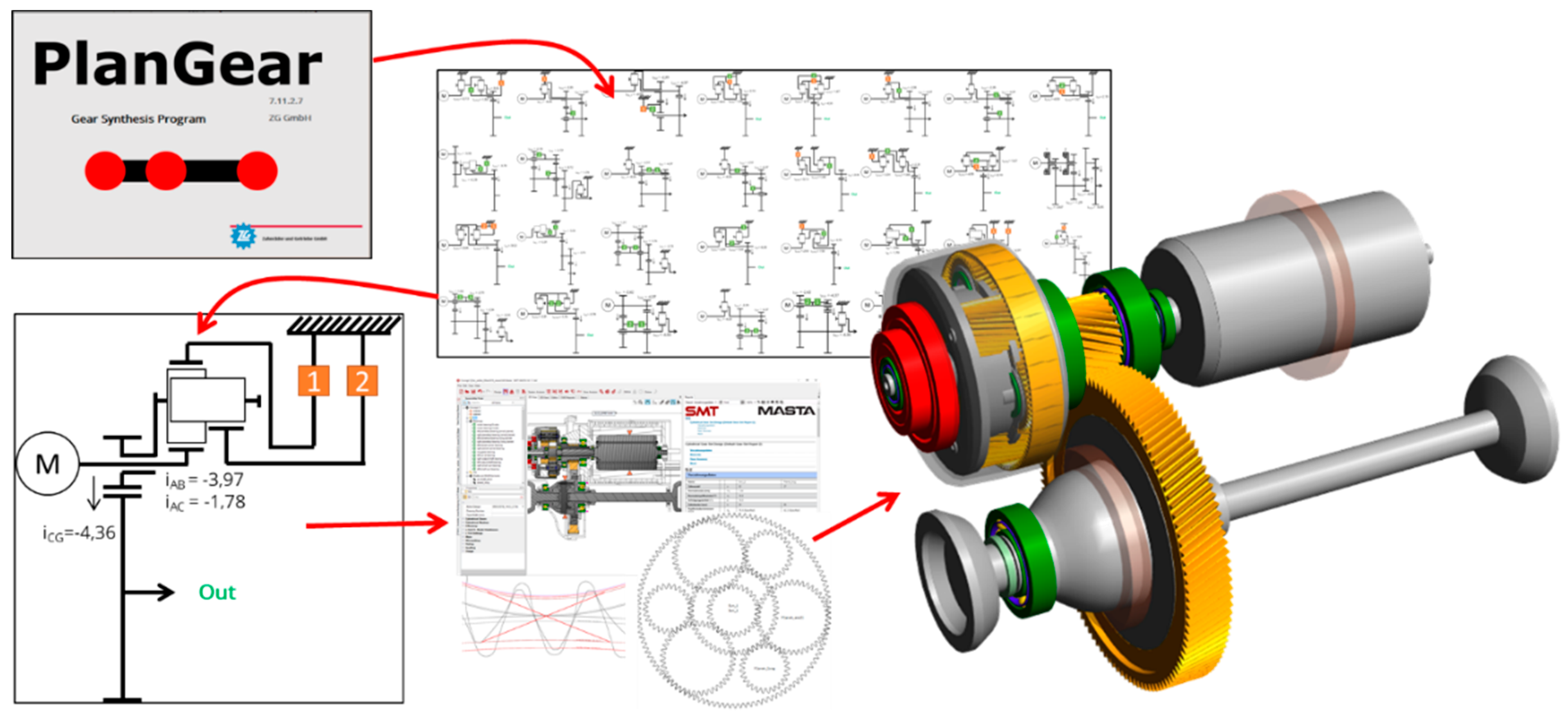
2.3. Transmission
- Overall powertrain efficiency during type approval cycles: no clear winner between the two options
- A dual ratio transmission with adapted ratios provides higher launch torque in first gear and higher top speed for the same motor speed in the second gear: this benefits the projects demonstrator that has limited motor torque due to the current limitations of the available GaN devices.
- Market demand: some customers prefer a dual ratio transmission for EV powertrains for particular reasons (e.g., gradeability, large difference between empty vehicle mass and fully loaded vehicle mass).
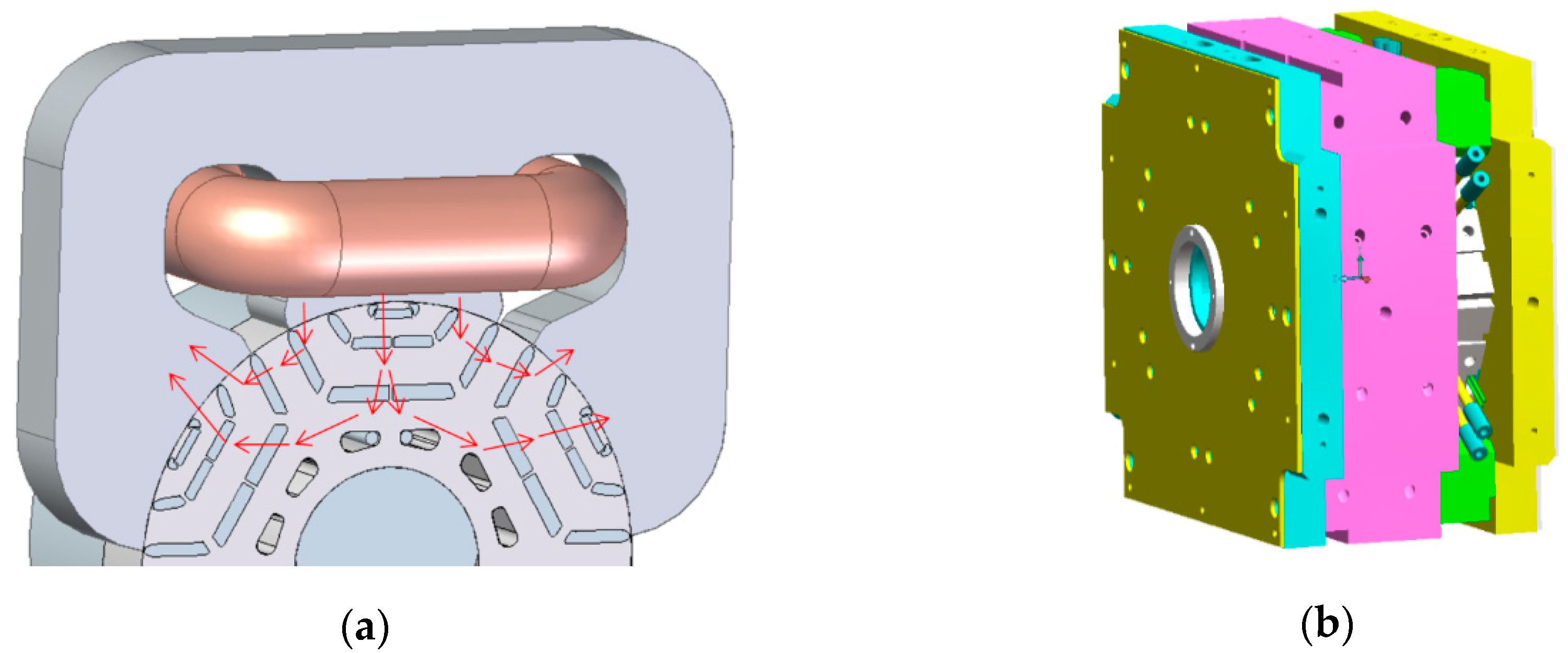
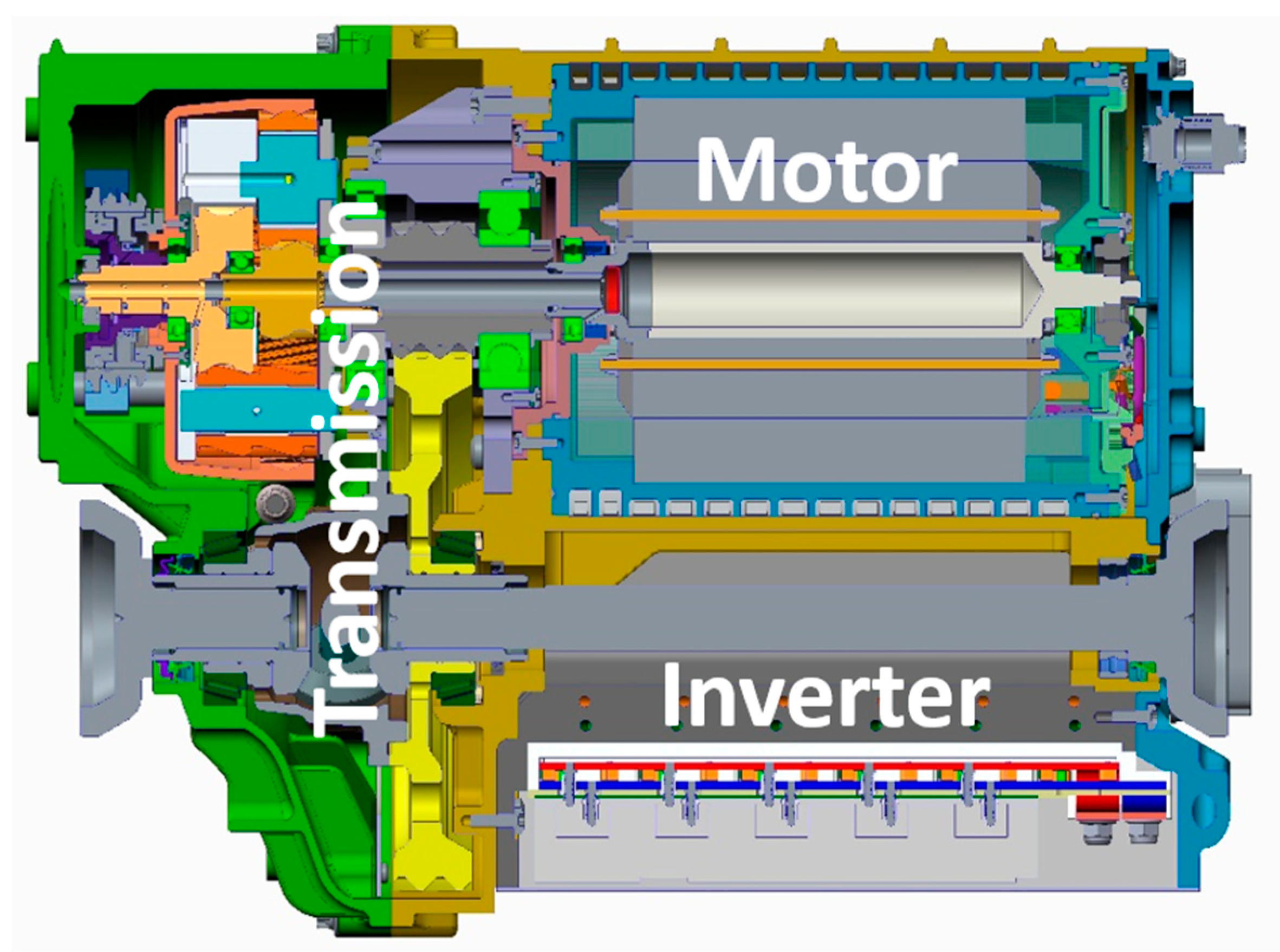
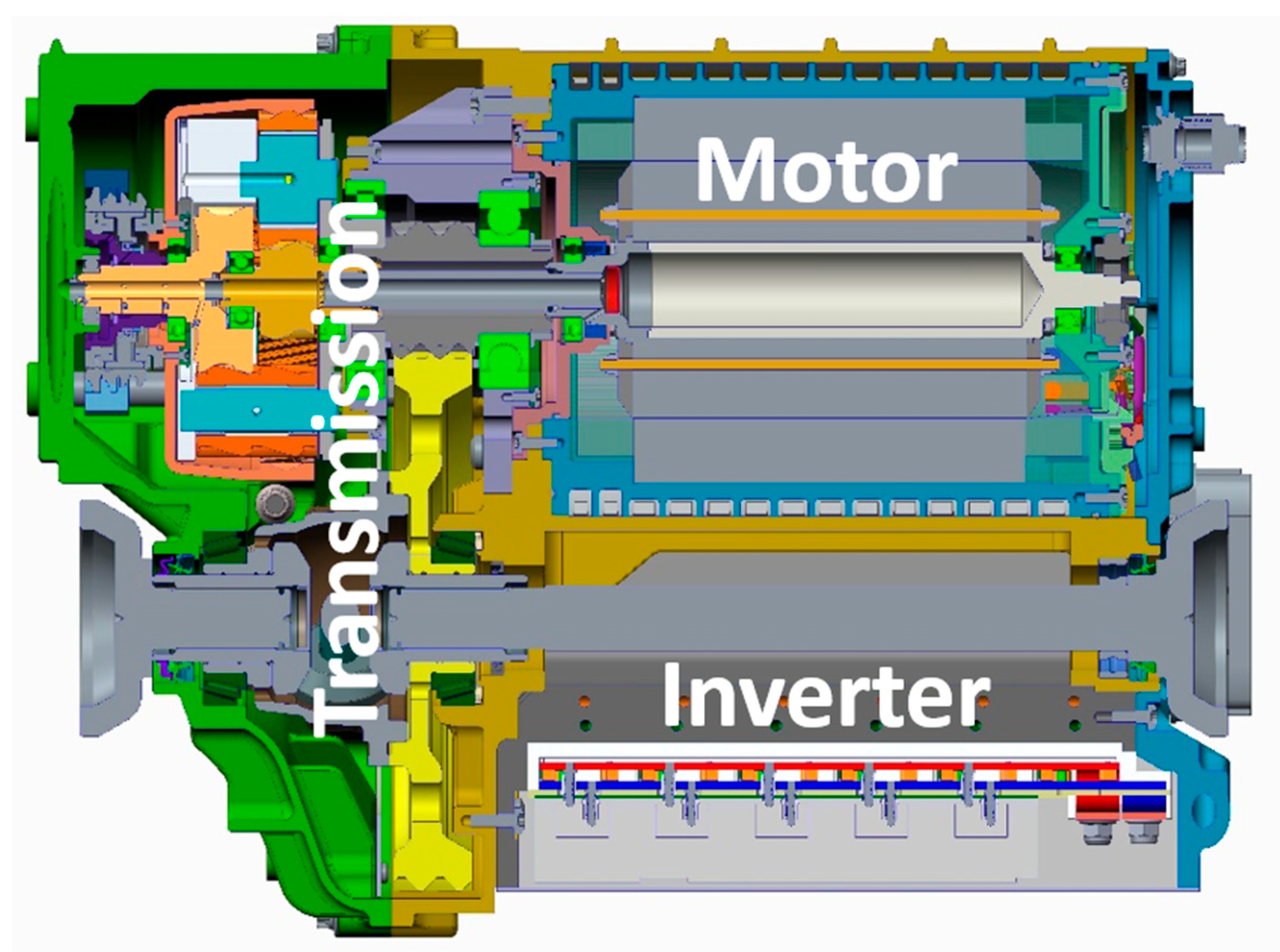
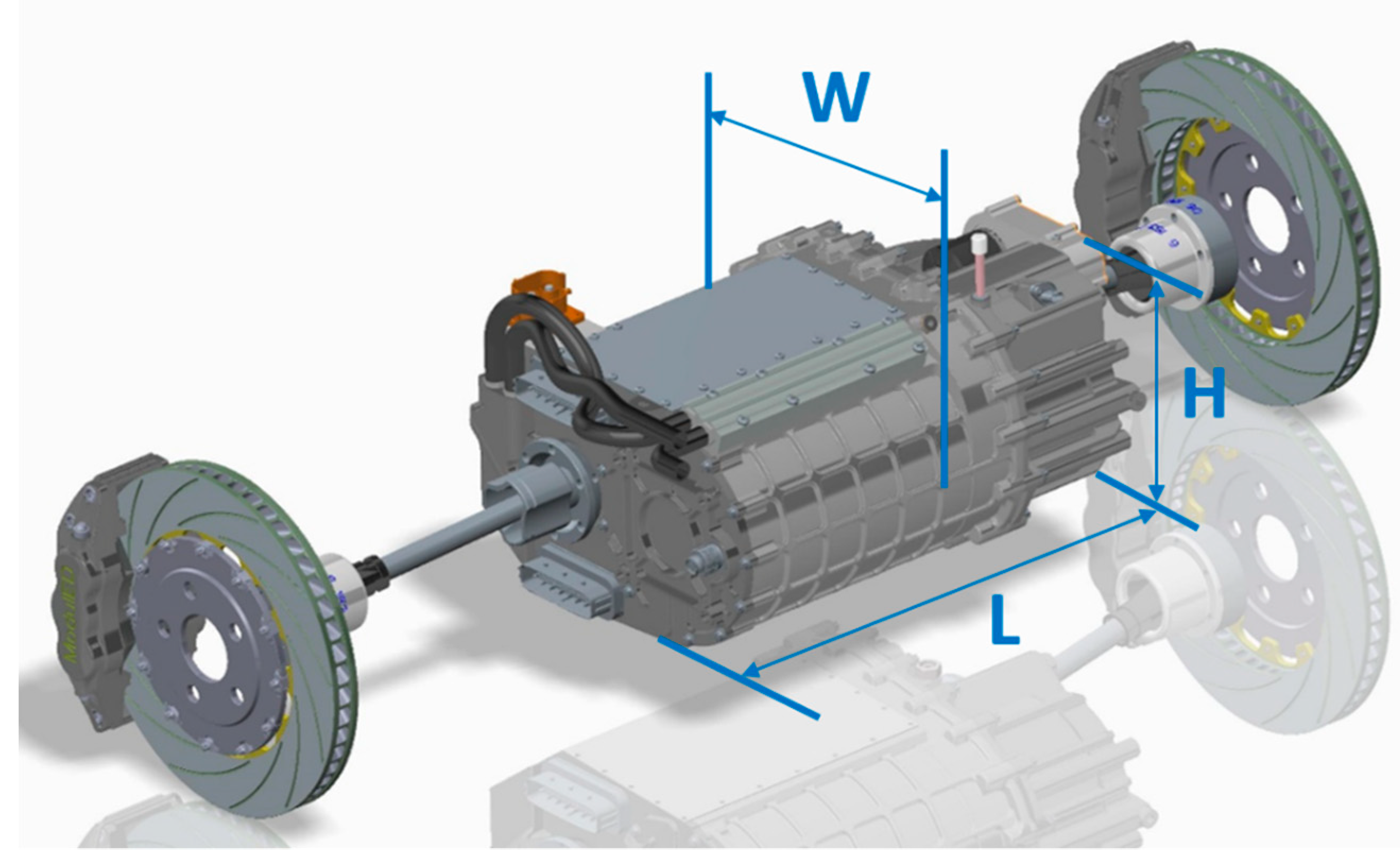
2.4. Module Assembly and Final Specifications
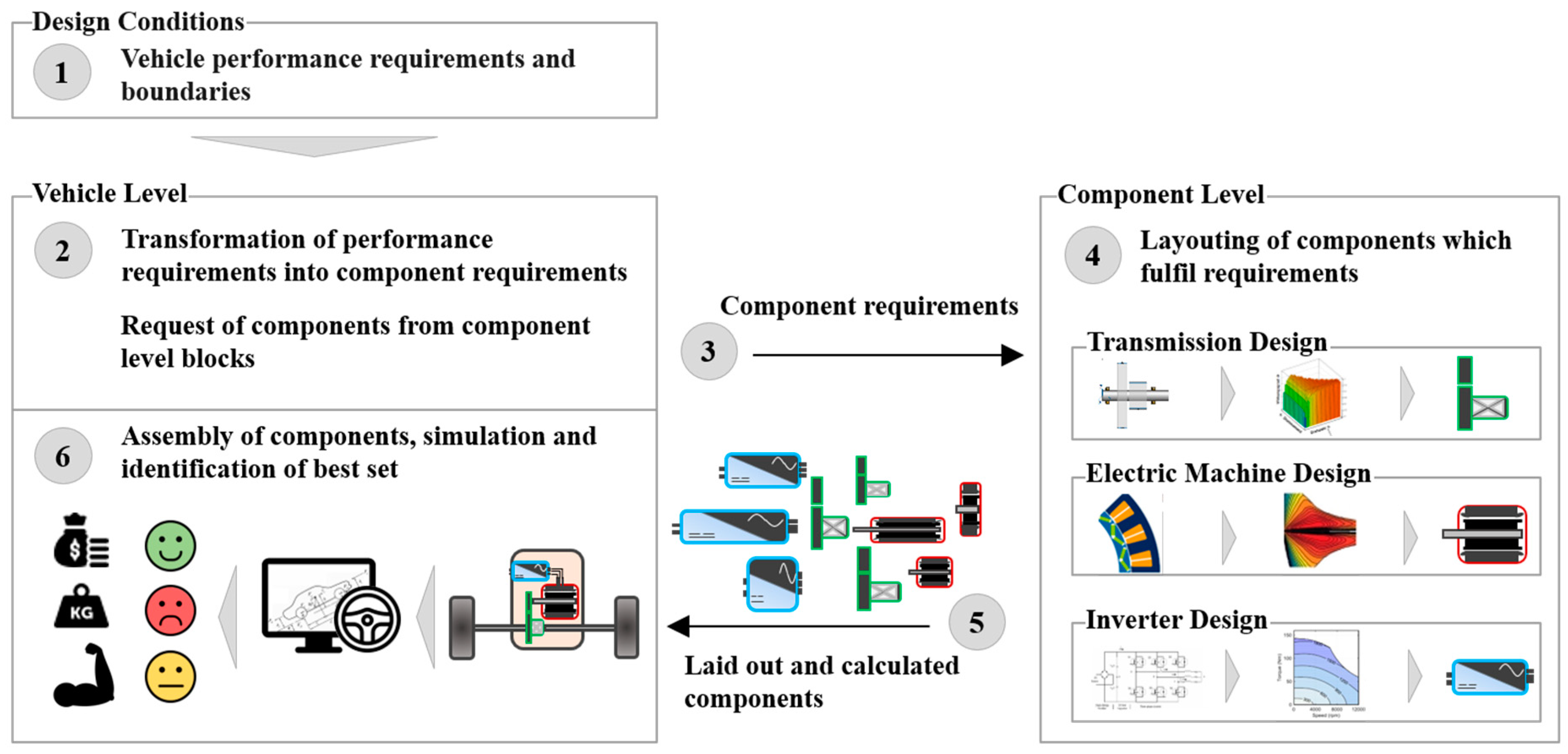
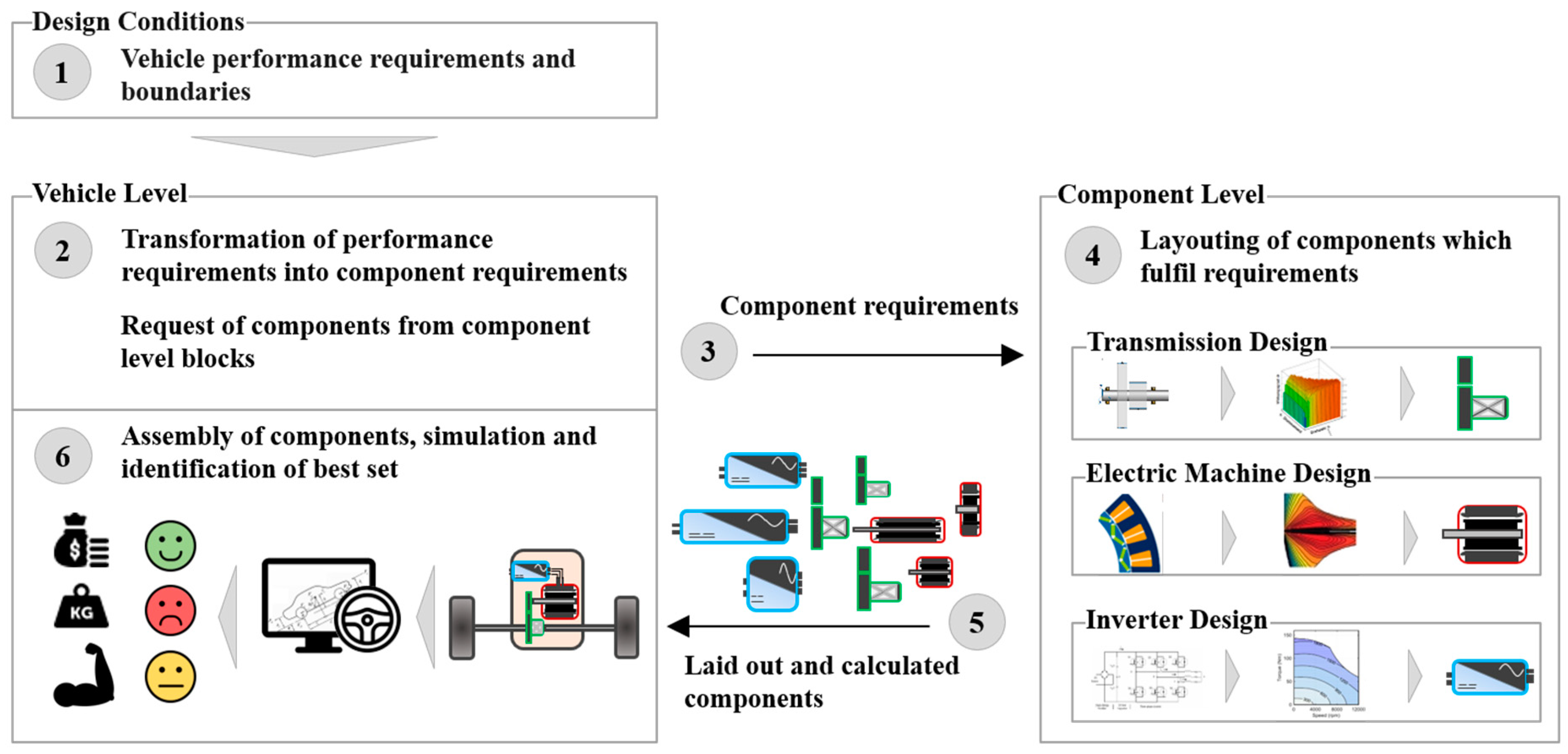
2.5. Holistic Design Approach
- Electric Machine: High-speed EM generates power over high speeds and therefore, does need less winding current than low-speed EM. Ohmic losses in the windings are reduced while the iron losses slightly rise. However, the savings in winding losses surpass the additional iron losses and the machine is more efficient.
- Inverter: Classical Si-based inverters are still a good choice for slow to medium switching frequencies. At high switching frequencies, GaN and SiC provide a suitable characteristic. The latter option leads to very compact inverters, as the size of the DC-link capacitor can be reduced with higher switching frequencies.
- Transmission: With higher maximum EM speeds, higher reduction ratios are required and the transmission gets bigger and less efficient. For high reduction ratios, more complex topologies show advantages compared to simple spur gear designs.
- Module Level: A module based on a high speed electric machine as presented above is more efficient and compact compared to conventional modules, even though the transmission itself is not. The drawbacks on the transmission side are overcompensated by the advantages on the machine and inverter side. However, due to high switching frequencies, conventional IGBTs produce high switching losses and thus, wide bandgap materials (GaN and SiC) should be used. Based on the current cost structures, the use of these materials results in a higher price on module level.
3. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Todts, W. CO2 Emissions from Cars: The Facts; European Federation for Transport and Environment AISBL: Brussels, Belgium, 2018. [Google Scholar]
- Auvinen, H.; Sampsa, R.; Juha, O.; Anu, T.; Toni, A. Process to Support Strategic Decision-Making: Transition to Electromobility. In Proceedings of the 2013 World Electric Vehicle Symposium and Exhibition, Barcelona, Spain, 17–20 November 2013; IEEE: Piscataway, NJ, USA, 2014. [Google Scholar]
- Damousis, Y.; Amditis, A.; Naberezhnykh, D. Electromobility: A Market Readiness Study—Preliminary Findings. In Proceedings of the IEEE IEVC’14, Florence, Italy, 16–19 December 2014. [Google Scholar]
- Lienkamp, M. Status Electromobility 2016: Or How Tesla Will not Win; Technische Universität München: Munich, Germany, 2016; p. 4. [Google Scholar]
- Boglietti, A.; El-Refaie, A.M.; Drubel, O.; Omekanda, A.M.; Bianchi, N.; Agamloh, E.B.; Popescu, M.; Gerlando, A.D.; Bartolo, J.B. Electrical Machine Topologies—Hottest Topics in the Electrical Machine Research Community; IEEE: Piscataway, NJ, USA, 2014; Volume 18, p. 24. [Google Scholar]
- Vagati, A.; Boazzo, B.; Guglielmi, P.; Pellegrino, G. Ferrite Assisted Synchronous Reluctance Machines: A General Approach. In Proceedings of the 2012 International Conference on Electrical Machines, Marseille, France, 2–5 September 2012; IEEE: Piscataway, NJ, USA, 2012. [Google Scholar]
- Tenconi, A.; Vaschetto, S.; Vigliani, A. Electrical Machines for High-Speed Applications: Design Considerations and Tradeoffs. IEEE Trans. Ind. Electron. 2014, 61, 3022–3029. [Google Scholar] [CrossRef]
- Benedikt Vogel (on behalf of: Swiss Federal Office of Energy SFOE, Bern, Switzerland). Electric Power Package with High Efficiency. Available online: https://www.researchgate.net/publication/ 332112701_Electric_Power_Package_with_high_Efficiency (accessed on 21 November 2019).
- Arnold Magnetic Technologies Co. N45UH Sintered Neodymium-Iron-Boron Magnets. Available online: https://www.arnoldmagnetics.com/wp-content/uploads/2017/11/N45UH-151021.pdf (accessed on 21 November 2019).
- Aichi Steel Corporation. MAGFINE® NdFeB Anisotropic Resin-Bonded Magnet—Technical Datasheet. Available online: https://www.aichi-steel.co.jp/ENGLISH/products/electromagnetic/bonded_magnet/ index.html (accessed on 21 November 2019).
- GaN Systems Inc. GS66516T Top-Side Cooled 650 V E-Mode GaN Transistor—Preliminary Datasheet. Available online: https://gansystems.com/gan-transistors/gs66516t/ (accessed on 13 March 2019).
- Kaminski, N.; Hilt, O. SiC and GaN Devices—Competition or Coexistence? In Proceedings of the 2012 7th International Conference on Integrated Power Electronics Systems (CIPS), Nuremberg, Germany, 6–8 March 2012; IEEE: Piscataway, NJ, USA, 2012. [Google Scholar]
- Gerrits, T.; Wijnands, C.G.E.; Paulides, J.J.H.; Duarte, J.L. Fault-Tolerant Operation of a Fully Electric Gearbox Equivalent. IEEE Trans. Ind. Appl. 2012, 48, 1855–1865. [Google Scholar] [CrossRef]
- Gerrits, T.; Wijnands, C.G.E.; Paulides, J.J.H.; Duarte, J.L. Electrical Gearbox Equivalent by Means of Dynamic Machine Operation. In Proceedings of the 14th European Conference on Power Electronics and Applications, Birmingham, UK, 30 August–1 September 2011. [Google Scholar]
- Gerrits, T.; Duarte, J.L.; Wijnands, C.G.E.; Lomonova, E.A.; Paulides, J.J.H.; Encica, L. Twelve-Phase Open-Winding SPMSM Development for Speed Dependent Reconfigurable Traction Drive. In Proceedings of the 2015 10th International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte Carlo, Monaco, 31 March–2 April 2015; pp. 1–7. [Google Scholar]
- Daniels, B.; Gurung, J.; Huisman, H.; Lomonova, E.A. Feasibility Study of Multi-Phase Machine Winding Reconfiguration for Fully Electric Vehicles. In Proceedings of the 2019 9th International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte-Carlo, Monaco, 8–10 May 2019; pp. 1–6. [Google Scholar]
- Albers, A.; Reichert, U.; Ott, S.; Radimersky, A. Software Supported Development Process of a Battery Electric Vehicle Powertrain Considering the Efficiency; VDI-Berichte: Düsseldorf, Germany, 2016; Volume 2276, pp. 321–337. [Google Scholar]
- Kieninger, D.; Hemsen, J.; Köller, S.; Uerlich, R. Automated Design and Optimization of Transmissions for Electric Vehicles. MTZ Worldwide 2019, 11, 94–98. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | ModulED Motor with Sintered Magnets | ModulED Motor with Injected Magnets | Reference Motor: BMW i3 |
|---|---|---|---|
| Peak phase current (A rms) | 225 | 225 | 410 |
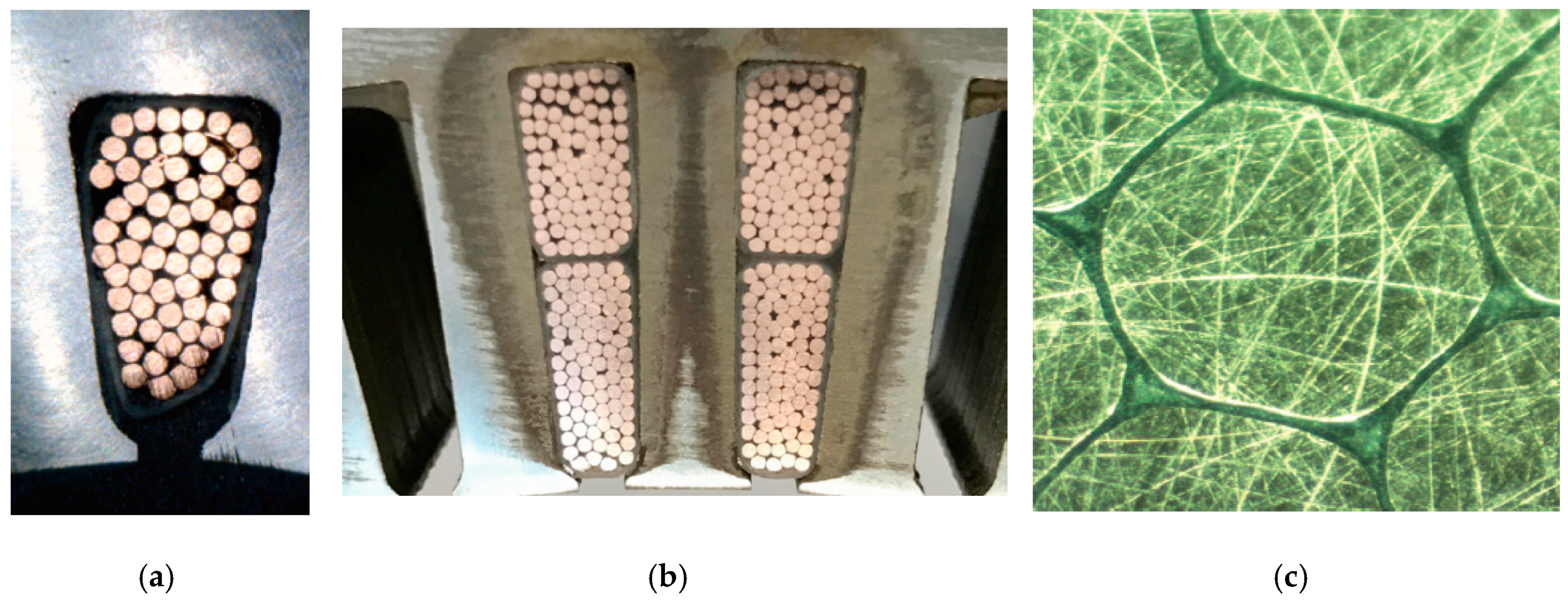
| Winding type | Formed Litz | Formed Litz | Classical Litz |
| Number of phases | 6 | 6 | 3 |
| Nominal speed (rpm) | 8600 | 8600 | 5000 |
| Max speed (rpm) | 22,500 | 22,500 | 11,400 |
| Peak torque (Nm) | 160 | 156 | 250 |
| Peak power (kW) | 157 | 158 | 131 |
| Battery voltage (VDC) | 320 | 320 | 360 |
| Stator outer diameter (mm) | 176 | 176 | 242 |
| Stator inner diameter (mm) | 118 | 118 | 180 |
| Stack length (mm) | 179 | 179 | 130 |
| Magnet Weight (kg) | 1.32 | 1.73 | 2.02 |
| Peak power @360 VDC (kW) | 177 | 178 | 131 |
| Magnet weight per kW (g) | 7.5 | 9.7 | 15.4 |
| Magnet reduction compared to reference motor (%) | 52 | 40 | 0 |
| Parameter | Value |
|---|---|
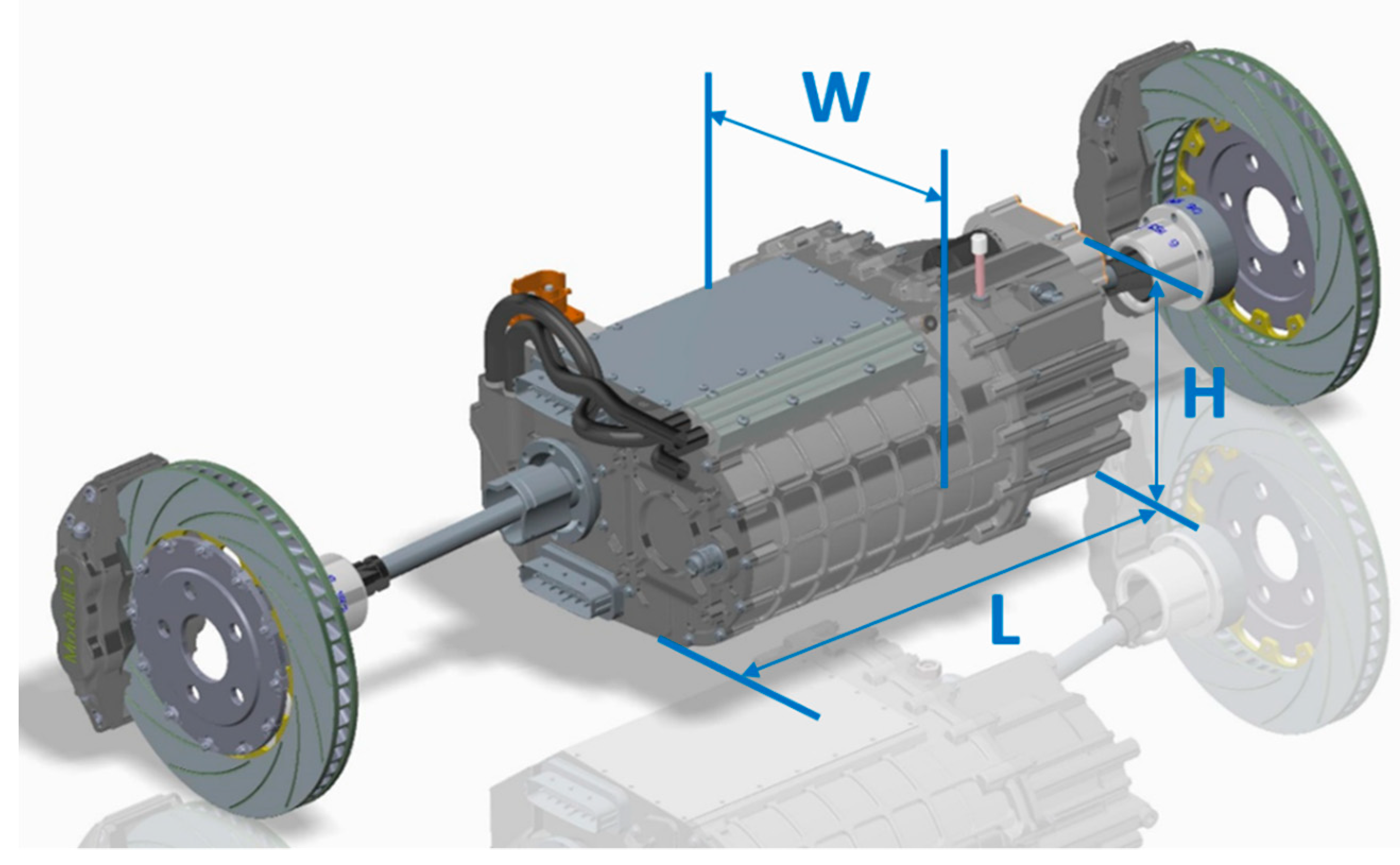
| Width, length & height (W × L × H as in Figure 19) | 405 × 513 × 275 mm |
| Peak power at wheels | 157 kW |
| Peak torque at wheels | 3460 Nm |
| Required battery DC voltage | 320 V |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hemsen, J.; Kieninger, D.; Eckstein, L.; Lidberg, M.R.; Huisman, H.; Arrozy, J.; Lomonova, E.A.; Oeschger, D.; Lanneluc, C.; Tosoni, O.; et al. Innovative and Highly Integrated Modular Electric Drivetrain. World Electr. Veh. J. 2019, 10, 89. https://doi.org/10.3390/wevj10040089
Hemsen J, Kieninger D, Eckstein L, Lidberg MR, Huisman H, Arrozy J, Lomonova EA, Oeschger D, Lanneluc C, Tosoni O, et al. Innovative and Highly Integrated Modular Electric Drivetrain. World Electric Vehicle Journal. 2019; 10(4):89. https://doi.org/10.3390/wevj10040089
Chicago/Turabian StyleHemsen, Jonas, Daniel Kieninger, Lutz Eckstein, Mathias R. Lidberg, Henk Huisman, Juris Arrozy, Elena A. Lomonova, Daniel Oeschger, Charley Lanneluc, Olivier Tosoni, and et al. 2019. "Innovative and Highly Integrated Modular Electric Drivetrain" World Electric Vehicle Journal 10, no. 4: 89. https://doi.org/10.3390/wevj10040089
APA StyleHemsen, J., Kieninger, D., Eckstein, L., Lidberg, M. R., Huisman, H., Arrozy, J., Lomonova, E. A., Oeschger, D., Lanneluc, C., Tosoni, O., Debal, P., Ernstorfer, M., & Mongellaz, R. (2019). Innovative and Highly Integrated Modular Electric Drivetrain. World Electric Vehicle Journal, 10(4), 89. https://doi.org/10.3390/wevj10040089