

Ensemble Learning Approaches for Multi-Class Intrusion Detection Systems for the Internet of Vehicles (IoV): A Comprehensive Survey


Abstract
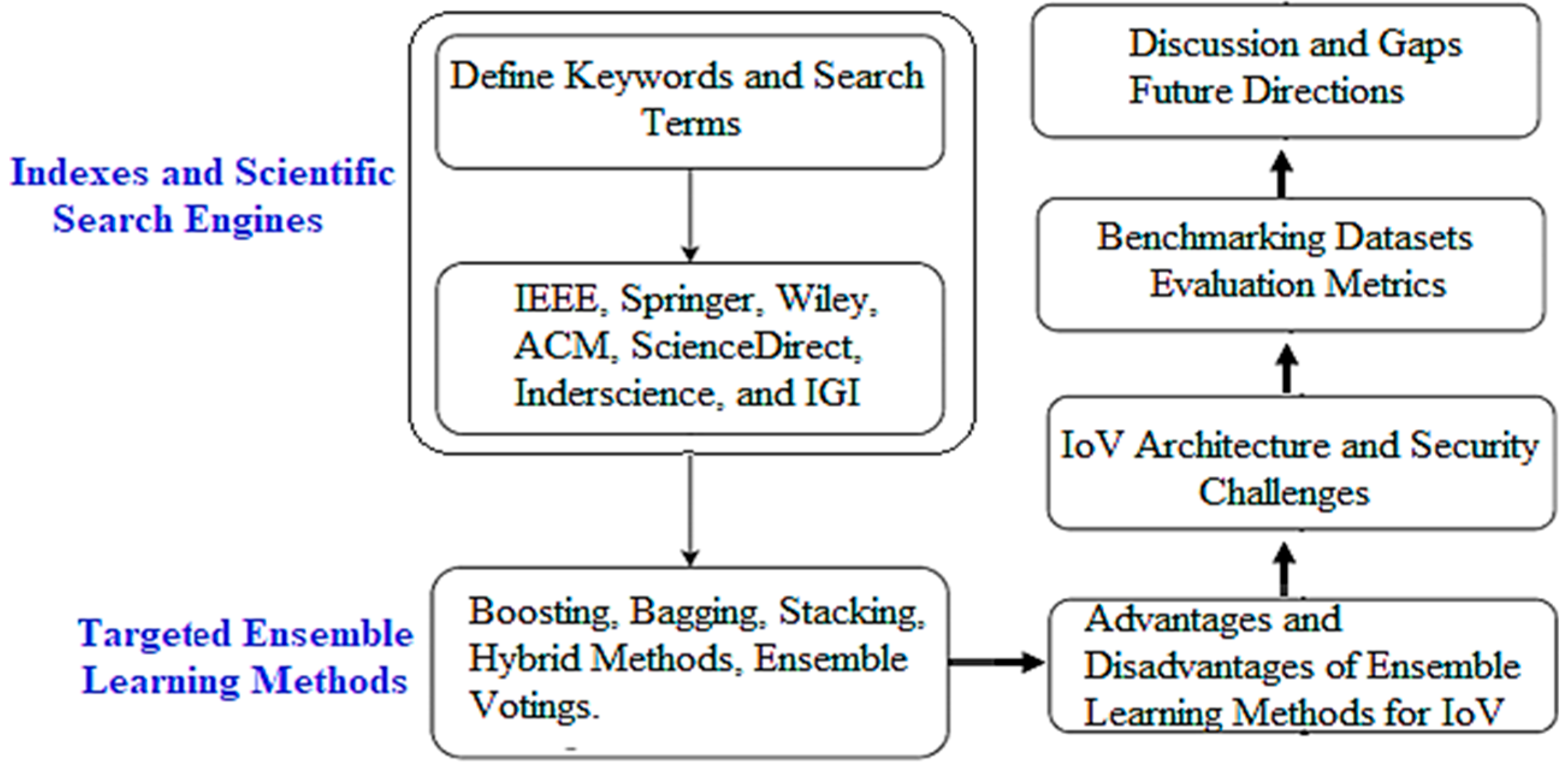
1. Introduction
1.1. Contributions
- Providing a comprehensive evaluation of ensemble learning methods (bagging, boosting, stacking, voting, hybrid) for multi-class intrusion detection in IoV.
- Proposing a taxonomy that analyzes and compares ensemble-based IDSs and datasets for IoV security context.
- Identifying recent research trends and gaps, recommending future directions for adaptive, scalable, and real-time IDS solutions in IoV.
1.2. Paper Organization
2. Background
2.1. IoV Security Challenges
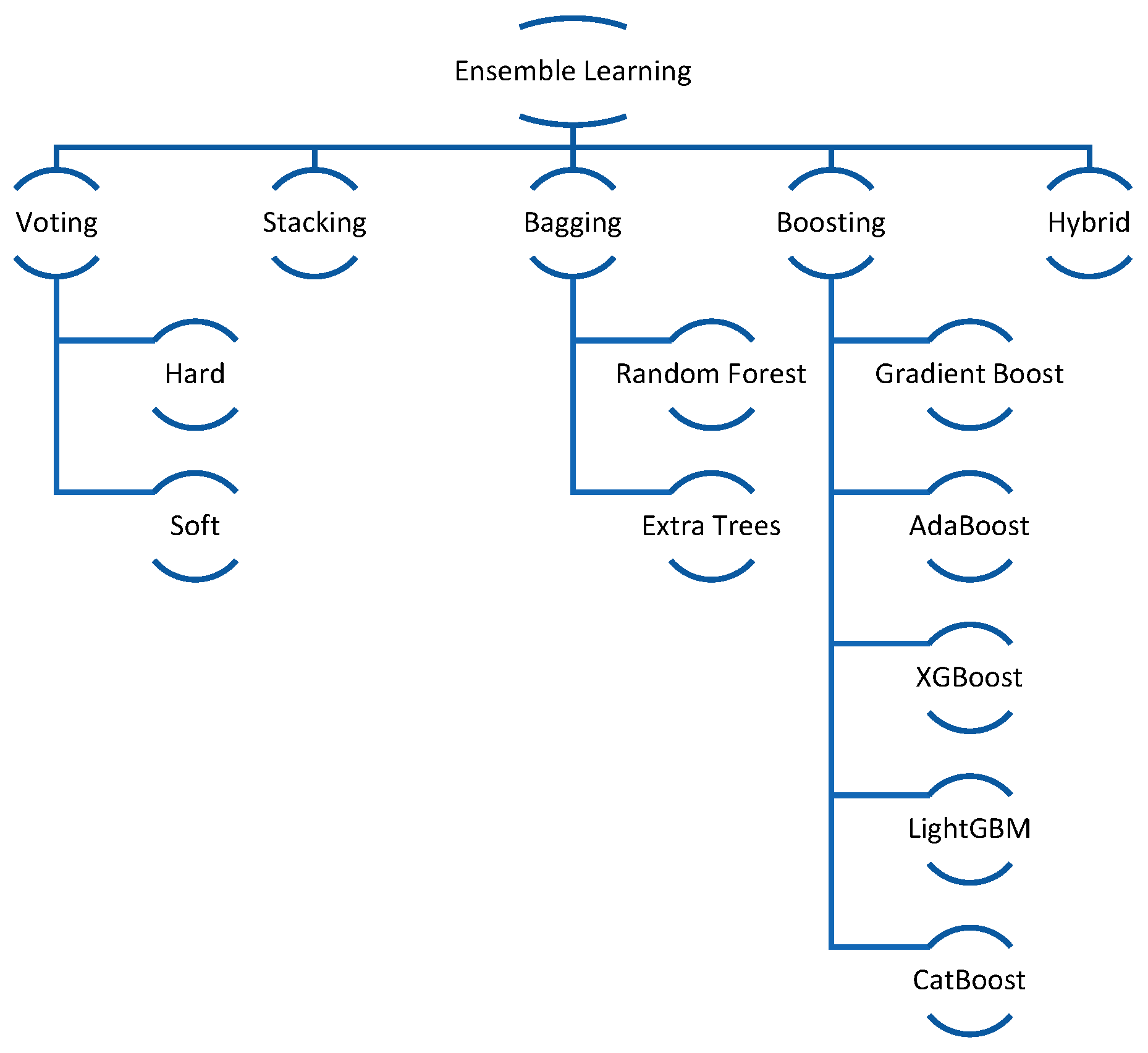
2.2. Ensemble Learning Approaches Overview
2.2.1. Boosting
XGBoost
Gradient Boosting (GB)
AdaBoost
LightGBM (LGBM)
Cat Boosting
2.2.2. Bagging Classifier
Random Forest (RF)
Decision Tree (DT)
2.2.3. Stacking
2.2.4. Hybrid Methods
2.2.5. Ensemble Voting Method
Hard Voting
Soft Voting

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ensemble Learning Technique | Examples | Strengths | Weaknesses |
|---|---|---|---|
| Bagging | Random Forest | Reduces variance, robust against overfitting [23] | May not reduce bias [23] |
| Boosting | AdaBoost, Gradient Boost, XGBoost, and Cat Boost | Reduces bias, improves accuracy [16,17] | Can overfit, sensitive to noisy data [17,18] |
| Stacking | A stacking ensemble where a Random Forest, Gradient Boosting, and K-Nearest Neighbors classifier serve as base learners, and a Logistic Regression model is used as the meta-learner to combine their predictions for final classification | Combines strengths of multiple models [27,28] | Complex to implement, risk of overfitting [27,28] |
| Hybrid | Combination of bagging, boosting | Superior performance leverages multiple approaches [29] | Highly complex, challenging to tune [29]. |
| Voting | Combining Random Forest, SVM, and KNN, then vote between them | Improves prediction accuracy by leveraging diverse classifiers with its simplicity of implementation and interpretation [30,31,32,33,34]. | Depending on the performance of individual models, it may not perform well if models are highly correlated [30,31,32,33,34]. |
3. Related Work
4. Ensemble Learning IDS for IoV: Research Trends and Gaps
- The need for lightweight models that can run efficiently in real-time on connected vehicles without hogging limited resources.
- The need for systems that are resilient against sophisticated attacks, security that can take a punch and still do its job.
4.1. Ensemble Learning IDS for IoV Taxonomy
4.1.1. Based on Deployment Strategy
Centralized Techniques
Distributed Deployment
4.1.2. Based on Data Fusion Technique
Data-Level Fusion
Feature-Level Fusion
Decision-Level Fusion
4.1.3. Based on Model Update Mechanisms
Static Models
Dynamic Models
4.1.4. Based on Detection Methods
Signatures Based
Anomaly Based
Specification Based
4.1.5. Based on Application Specificity
Network-Based IDSs
Host-Based IDSs
Hybrid IDSs
4.1.6. Based on Learning Paradigms
Supervised Learning
Unsupervised Learning
Semi-Supervised Learning
Reinforcement Learning
4.1.7. Based on Learner Diversity
Homogeneous Ensembles
4.1.8. Based on Generation Method
Bagging
Boosting
Stacking
Voting
4.2. Ensemble Learning-Based Multi-Class IDS for IoV
4.3. Datasets Used for IoV IDS
4.4. Evaluation Metrics Used for IoV IDS
5. Discussion
6. Conclusions and Future Direction
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| AdaBoost | Adaptive Boosting |
| APTs | Advanced Persistent Threats |
| API | Application Programming Interface |
| AUC | Area Under the Curve |
| BO | Bayesian Optimizer |
| CAN | Controller Area Network |
| CNN | Convolutional Neural Network |
| CPU | Central Processing Unit |
| DE | Differential Evolution |
| DEA | Data Envelopment Analysis |
| DL | Deep Learning |
| DDoS | Distributed Denial of Service |
| DNN | Deep Neural Network |
| DOS | Denial of Service |
| DRL | Deep Reinforcement Learning |
| DrDoS | Distributed Reflective Denial of Service |
| DT | Decision Tree |
| EL | Ensemble Learning |
| ELIDS | Ensemble Learning-Based Intrusion Detection Systems |
| ET | Extra Trees |
| FA-CNN | Feature Augmented Convolutional Neural Network |
| FL | Federated Learning |
| GA | Genetic Algorithm |
| GANs | Generative Adversarial Networks |
| GB | Gradient Boosting |
| GBM | Gradient Boosting Machine |
| GPS | Global Positioning System |
| GPU | Graphics Processing Unit |
| HIDS | Host-based Intrusion Detection System |
| ICTs | Information and Communication Technologies |
| IoT | Internet of Things |
| IoV | Internet of Vehicles |
| IRFC | Improved Random Forest Classifier |
| ISAC | Integrated Sensing and Communication |
| ITS | Intelligent Transportation Systems |
| KNN | K-Nearest Neighbours |
| LGBM | LightGBM |
| LiDAR | Light Detection and Ranging |
| LSTM | Long Short-Term Memory |
| ML | Machine Learning |
| NIDS | Network-based Intrusion Detection System |
| NN | Neural Network |
| PCA | Principal Component Analysis |
| PSO | Particle Swarm Optimization |
| RBF | Radial Basis Function |
| RFE | Recursive Feature Elimination |
| RF | Random Forest |
| RFR | Random Forest Regression |
| RNN | Recurrent Neural Network |
| ROC | Receiver Operating Characteristic |
| SE-LIDS | Stacking Enabled Ensemble Learning Based Intrusion Detection Scheme |
| SVM | Support Vector Machine |
| SMOTE | Synthetic Minority Oversampling Technique |
| UAV | Unmanned Aerial Vehicle |
| V2I | Vehicle to Infrastructure |
| V2V | Vehicle to Vehicle |
| VANET | Vehicular Ad Hoc Network |
| VTE | Vehicle-to-Everything |
| XAI | Explainable Artificial Intelligence |
| XGBoost | Extreme Gradient Boosting |
References
- Aradhana, B.; Kumar, A.; Jain, P.K. A comparative performance analysis of vehicular routing protocols in intelligent transportation systems. Telecommun. Syst. 2025, 88, 26. [Google Scholar] [CrossRef]
- Ji, B.; Chen, Z.; Mumtaz, S.; Han, C.; Li, C.; Wen, H.; Wang, D. A Vision of IoV in 5G HetNets: Architecture, Key Technologies, Applications, Challenges, and Trends. IEEE Netw. 2022, 36, 153–161. [Google Scholar] [CrossRef]
- Arena, F.; Pau, G. An overview of vehicular communications. Future Internet 2019, 11, 27. [Google Scholar] [CrossRef]
- Sarsam, S.M. Cybersecurity Challenges in Autonomous Vehicles: Threats, Vulnerabilities, and Mitigation Strategies. SHIFRA 2023, 2023, 34–42. [Google Scholar] [CrossRef]
- El-Rewini, Z.; Sadatsharan, K.; Selvaraj, D.F.; Plathottam, S.J.; Ranganathan, P. Cybersecurity challenges in vehicular communications. Veh. Commun. 2020, 23, 100214. [Google Scholar] [CrossRef]
- Nuiaa, R.R.; Manickam, S.; Alsaeedi, A.H. Distributed reflection denial of service attack: A critical review. Int. J. Electr. Comput. Eng. 2021, 11, 5327–5341. [Google Scholar] [CrossRef]
- Ivanov, I.; Maple, C.; Watson, T.; Lee, S. Cyber security standards and issues in V2X communications for internet of vehicles. In Proceedings of the Living in the Internet of Things: Cybersecurity of the IoT—2018, London, UK, 28–29 March 2018; pp. 28–29. [Google Scholar] [CrossRef]
- Syarif, I.; Zaluska, E.; Prugel-Bennett, A.; Wills, G. Application of bagging, boosting, and stacking ensemble machine learning methods to network intrusion detection. In Proceedings of the 8th International Conference on Machine Learning and Data Mining (MLDM 2012), Berlin, Germany, 13–20 July 2012; Lecture Notes in Computer Science. Volume 7197, pp. 593–602. [Google Scholar]
- Moustafa, N.; Turnbull, B.; Choo, K.K.R. An ensemble intrusion detection technique based on proposed statistical flow features for protecting network traffic of Internet of Things. IEEE Internet Things J. 2019, 6, 4815–4830. [Google Scholar] [CrossRef]
- Almehdhar, M.; Albaseer, A.; Khan, M.A.; Abdallah, M.; Menouar, H.; Al-Kuwari, S.; Al-Fuqaha, A. Deep learning in the fast lane: A survey on advanced intrusion detection systems for intelligent vehicle networks. IEEE Open J. Veh. Technol. 2024, 5, 869–906. [Google Scholar] [CrossRef]
- Billah, M.; Mehedi, S.T.; Anwar, A.; Rahman, Z.; Islam, R. A systematic literature review on blockchain enabled federated learning framework for internet of vehicles. arXiv 2022, arXiv:2203.05192. [Google Scholar]
- Zhang, J.; Yu, F.R.; Nekovee, M.; Liu, N. Software-defined vehicular networks: Architectures, algorithms, and applications. IEEE Commun. Surv. Tutor. 2019, 21, 499–548. [Google Scholar] [CrossRef]
- Wang, X.; Zhao, L.; Zhang, Y. Sustainable urban development through IoV-enhanced traffic optimization. Sustain. Cities Soc. 2023, 68, 102736. [Google Scholar]
- Liu, B.; Wang, Y.; Zhang, H. IoV-based intelligent transportation systems: Opportunities and challenges. IEEE Internet Things J. 2023, 10, 2205–2218. [Google Scholar]
- Dietterich, T.G. Ensemble methods in machine learning. In Proceedings of the International Workshop on Multiple Classifier Systems, Cagliari, Italy, 21–23 June 2000; Springer: Berlin/Heidelberg, Germany, 2000; Volume 1857, pp. 1–15. [Google Scholar]
- Freund, Y.; Schapire, R.E. A decision-theoretic generalization of on-line learning and an application to boosting. J. Comput. Syst. Sci. 1997, 55, 119–139. [Google Scholar] [CrossRef]
- Prokhorenkova, L.; Gusev, G.; Vorobev, A.; Dorogush, A.V.; Gulin, A. CatBoost: Unbiased boosting with categorical features. In Advances in Neural Information Processing Systems 31 (NeurIPS 2018); Curran Associates, Inc.: Montréal, QC, Canada, 2018; pp. 6638–6648. [Google Scholar]
- Chen, T.; Guestrin, C. XGBoost: A scalable tree boosting system. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016; pp. 785–794. [Google Scholar]
- Dhaliwal, S.S.; Nahid, A.-A.; Abbas, R. Effective intrusion detection system using XGBoost. Information 2018, 9, 149. [Google Scholar] [CrossRef]
- Upadhyay, D.; Manero, J.; Zaman, M.; Sampalli, S. Gradient boosting feature selection with machine learning classifiers for intrusion detection on power grids. IEEE Trans. Netw. Serv. Manag. 2021, 18, 1104–1116. [Google Scholar] [CrossRef]
- Wu, Y.; Ke, Y.; Chen, Z.; Liang, S.; Zhao, H.; Hong, H. Application of alternating decision tree with AdaBoost and bagging ensembles for landslide susceptibility mapping. Catena 2020, 187, 104396. [Google Scholar] [CrossRef]
- Ke, G.; Meng, Q.; Finley, T.; Wang, T.; Chen, W.; Ma, W.; Ye, Q.; Liu, T.-Y. LightGBM: A highly efficient gradient boosting decision tree. In Advances in Neural Information Processing Systems 30 (NeurIPS 2017); Curran Associates, Inc.: Long Beach, CA, USA, 2017; pp. 3146–3154. [Google Scholar]
- Breiman, L. Bagging predictors. Mach. Learn. 1996, 24, 123–140. [Google Scholar] [CrossRef]
- Jin, Z.; Zhang, J.; Wang, Y.; Li, X. RFRSF: Employee turnover prediction based on random forests and survival analysis. In Proceedings of the International Conference on Neural Information Processing (ICONIP 2020); Springer: Cham, Switzerland, 2020; Volume 12343, pp. 503–515. [Google Scholar] [CrossRef]
- Mienye, I.D.; Jere, N. A survey of decision trees: Concepts, algorithms, and applications. IEEE Access 2024, 12, 86716–86727. [Google Scholar] [CrossRef]
- Singh, A.P.; Chaurasia, B.K.; Tripathi, A. Stacking Enabled Ensemble Learning Based Intrusion Detection Scheme (SELIDS) for IoV. SN Comput. Sci. 2024, 5, 1000. [Google Scholar] [CrossRef]
- Alalwany, E.; Alsharif, B.; Alotaibi, Y.; Alfahaid, A.; Mahgoub, I.; Ilyas, M. Stacking Ensemble Deep Learning for Real-Time Intrusion Detection in IoMT Environments. Sensors 2025, 25, 624. [Google Scholar] [CrossRef] [PubMed]
- Sagi, O.; Rokach, L. Ensemble learning: A survey. WIREs Data Min. Knowl. Discov. 2018, 8, e1249. [Google Scholar] [CrossRef]
- Zhou, Z.-H. Ensemble Methods: Foundations and Algorithms; Chapman and Hall/CRC: Boca Raton, FL, USA, 2012. [Google Scholar] [CrossRef]
- Polikar, R. Ensemble based systems in decision making. IEEE Circ. Syst. Mag. 2006, 6, 21–45. [Google Scholar] [CrossRef]
- Seiller, A.; Gaussier, É.; Devijver, E.; Clausel, M.; Alkhoury, S. Ensembles of Probabilistic Regression Trees. arXiv 2024, arXiv:2406.14033. [Google Scholar]
- Bhati, N.S.; Khari, M.; Malik, H.; Chaudhary, G.; Srivastava, S. A new ensemble based approach for intrusion detection system using voting. J. Intell. Fuzzy Syst. 2021, 42, 969–979. [Google Scholar] [CrossRef]
- Zhu, F.; Sun, Y.; Han, M.; Hou, T.; Zeng, Y.; Lin, M.; Wang, Y.; Zhong, P.A. A robust bayesian multi-machine learning ensemble framework for probabilistic groundwater level forecasting. J. Hydrol. 2025, 650, 132567. [Google Scholar] [CrossRef]
- Rebai, Y.; Guesmi, R.; Ayed, H.B. A two-stage voting-boosting technique for concurrent ensemble learning. Entropy 2023, 25, 555. [Google Scholar] [CrossRef]
- Ali, E.S.; Hasan, M.K.; Hassan, R.; Saeed, R.A.; Hassan, M.B.; Islam, S.; Bevinakoppa, S. Machine learning technologies for secure vehicular communication in internet of vehicles: Recent advances and applications. Secur. Commun. Netw. 2021, 2021, 8868355. [Google Scholar] [CrossRef]
- Chiroma, H.; Abdulhamid, S.I.M.; Hashem, I.A.; Adewole, K.S.; Ezugwu, A.E.; Abubakar, S.; Shuib, L. DL-based big data analytics for internet of vehicles: Taxonomy, challenges, and research directions. Math. Probl. Eng. 2021, 2021, 9022558. [Google Scholar] [CrossRef]
- Al-Jarrah, O.Y.; Maple, C.; Dianati, M.; Oxtoby, D.; Mouzakitis, A. Intrusion detection systems for intra-vehicle networks: A review. IEEE Access 2019, 7, 21266–21289. [Google Scholar] [CrossRef]
- Talpur, A.; Gurusamy, M. Machine learning for security in vehicular networks: A comprehensive survey. IEEE Commun. Surv. Tutor. 2021, 24, 346–379. [Google Scholar] [CrossRef]
- Saheed, Y.K.; Chukwuere, J.E. Xaiensembletl-iov: A new explainable artificial intelligence ensemble transfer learning for zero-day botnet attack detection in the internet of vehicles. Results Eng. 2024, 24, 103171. [Google Scholar] [CrossRef]
- Selvakumar, B.; Sivaanandh, M.; Muneeswaran, K.; Lakshmanan, B. Ensemble of feature augmented convolutional neural network and deep autoencoder for efficient detection of network attacks. Sci. Rep. 2025, 15, 4267. [Google Scholar] [CrossRef] [PubMed]
- Nassreddine, G.; Nassereddine, M.; Al-Khatib, O. Ensemble learning for network intrusion detection based on correlation and embedded feature selection techniques. Computers 2025, 14, 82. [Google Scholar] [CrossRef]
- Limouchi, E.; Chan, F. Optimized Machine Learning-Based Intrusion Detection System for Internet of Vehicles. In Proceedings of the 2023 IEEE Symposium Series on Computational Intelligence (SSCI), Mexico City, Mexico, 5–8 December 2023; pp. 1151–1157. [Google Scholar] [CrossRef]
- Anthony, C.; Elgenaidi, W.; Rao, M. Intrusion Detection System for Autonomous Vehicles Using Non-Tree-Based Machine Learning Algorithms. Electronics 2024, 13, 809. [Google Scholar] [CrossRef]
- Shahriar, M.H.; Xiao, Y.; Moriano, P.; Lou, W.; Hou, Y.T. CANShield: Deep Learning-Based Intrusion Detection Framework for Controller Area Networks at the Signal-Level. IEEE Internet Things J. 2023, 10, 22111–22127. [Google Scholar] [CrossRef]
- Al-Hawawreh, M.; Hossain, M.S. Federated Learning-Assisted Distributed Intrusion Detection Using Mesh Satellite Nets for Autonomous Vehicle Protection. IEEE Trans. Consum. Electron. 2024, 70, 854–862. [Google Scholar] [CrossRef]
- Tu, J.; Shang, W. Enhancing Intrusion Detection in the Internet of Vehicles: An Ensemble and Optimized Machine Learning Approach. In Proceedings of the 2023 2nd International Conference on Sensing, Measurement, Communication and Internet of Things Technologies (SMC-IoT), Chengdu, China, 15–17 December 2023; pp. 207–211. [Google Scholar] [CrossRef]
- Hong, Y.-W.; Yoo, D.-Y. Multiple Intrusion Detection Using Shapley Additive Explanations and a Heterogeneous Ensemble Model in an Unmanned Aerial Vehicle’s Controller Area Network. Appl. Sci. 2024, 14, 5487. [Google Scholar] [CrossRef]
- Ahsan, S.I.; Legg, P.; Alam, S.M. A Stacked Ensemble Learning IDS Model for Software-Defined VANET. arXiv 2023, arXiv:2312.04956v4. [Google Scholar]
- Korium, M.S.; Saber, M.; Beattie, A.; Narayanan, A.; Sahoo, S.; Nardelli, P.H. Intrusion Detection System for Cyberattacks in the Internet of Vehicles Environment. Ad Hoc Netw. 2024, 153, 103330. [Google Scholar] [CrossRef]
- Zhang, K.; Yang, J.; Shao, Y.; Hu, L.; Ou, W.; Han, W.; Zhang, Q. Intrusion Detection Model for Internet of Vehicles Using GRIPCA and OWELM. IEEE Access 2024, 11, 321–332. [Google Scholar] [CrossRef]
- Yang, L.; Shami, A.; Stevens, G.; de Rusett, S. LCCDE: A Decision-Based Ensemble Framework for Intrusion Detection in The Internet of Vehicles. In Proceedings of the GLOBECOM 2022—2022 IEEE Global Communications Conference, Rio de Janeiro, Brazil, 4–8 December 2022; pp. 3545–3550. [Google Scholar] [CrossRef]
- Kim, T.H.; Ojo, S.; Krichen, M.; Alamro, M.A. Single and Mixed Sensory Anomaly Detection in Connected and Automated Vehicle Sensor Networks. Electronics 2024, 13, 1885. [Google Scholar] [CrossRef]
- Qin, J.; Xun, Y.; Liu, J. CVMIDS: Cloud-Vehicle Collaborative Intrusion Detection System for Internet of Vehicles. IEEE Internet Things J. 2024, 11, 321–332. [Google Scholar] [CrossRef]
- Jasim, M.S.; Zaghden, N.; Bouhlel, M.S. Improving Detection and Prediction of Traffic Congestion in VANETs: An Examination of Machine Learning. Int. J. Comput. Digit. Syst. 2024, 15, 947–960. [Google Scholar] [CrossRef]
- Yang, L.; Shami, A. A Transfer Learning and Optimized CNN Based Intrusion Detection System for Internet of Vehicles. In Proceedings of the ICC 2022—IEEE International Conference on Communications, Seoul, Republic of Korea, 16–20 May 2022; pp. 2774–2779. [Google Scholar] [CrossRef]
- Jin, Z.; Zhou, J.; Li, B.; Wu, X.; Duan, C. FL-IIDS: A novel federated learning-based incremental intrusion detection system. Future Gener. Comput. Syst. 2024, 151, 57–70. [Google Scholar] [CrossRef]
- Ghaleb, F.A.; Saeed, F.; Al-Sarem, M.; Al-rimy, B.A.S.; Boulila, W.; Eljialy, A.E.M.; Aloufi, K.; Alazab, M. Misbehavior-Aware On-Demand Collaborative Intrusion Detection System Using Distributed Ensemble Learning for VANET. Electronics 2020, 9, 1411. [Google Scholar] [CrossRef]
- Aggarwal, K.; Kaddoum, G. LSTM-Based Hybrid Intrusion Detection System for Internet of Vehicles. In Proceedings of the GLOBECOM 2023—2023 IEEE Global Communications Conference, Kuala Lumpur, Malaysia, 4–8 December 2023; pp. 3831–3836. [Google Scholar] [CrossRef]
- Anyanwu, G.O.; Nwakanma, C.I.; Lee, J.M.; Kim, D.S. Novel Hyper-Tuned Ensemble Random Forest Algorithm for Detecting False Basic Safety Messages in the Internet of Vehicles. ICT Express 2023, 9, 122–129. [Google Scholar] [CrossRef]
- Gou, W.; Zhang, H.; Zhang, R. Multi-Classification and Tree-Based Ensemble Network for the Intrusion Detection System in the Internet of Vehicles. Sensors 2023, 23, 8788. [Google Scholar] [CrossRef] [PubMed]
- Sani, A.R.; Hassan, M.U.; Chen, J. Privacy-preserving machine learning for electric vehicles: A survey. arXiv 2022, arXiv:2205.08462. [Google Scholar]
- Zhao, Y.; Xun, Y.; Liu, J. ClockIDS: A Real-Time Vehicle Intrusion Detection System Based on Clock Skew. IEEE Internet Things J. 2022, 9, 15593–15606. [Google Scholar] [CrossRef]
- Ali, M.N.; Imran, M.; Ullah, I.; Raza, G.M.; Kim, H.-Y.; Kim, B.-S. Ensemble and Gossip Learning-Based Framework for Intrusion Detection System in Vehicle-to-Everything Communication Environment. Sensors 2024, 24, 6528. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Qin, G.; Zou, M.; Liang, Y.; Wang, G.; Wang, K.; Feng, Y.; Zhang, Z. A lightweight intrusion detection system for internet of vehicles based on transfer learning and MobileNetV2 with hyper-parameter optimization. Multimed. Tools Appl. 2024, 83, 22347–22369. [Google Scholar] [CrossRef]
- Sebastian, A.; Pragna, R.; Sudhakaran, G.; Renjith, P.N.; Leela Karthikeyan, H. Enhancing Intrusion Detection in Internet of Vehicles Through Federated Learning. arXiv 2023. [Google Scholar] [CrossRef]
- Dasari, D.R.; Bindu, G.H. An Intelligent Intrusion Detection System in IoV Using Machine Learning and Deep Learning Models. Int. J. Commun. Syst. 2025, 38, e70131. [Google Scholar] [CrossRef]
- Alani, M.M.; Awad, A.I.; Barka, E. A Hybrid Ensemble Learning-Based Intrusion Detection System for the Internet of Things. In Proceedings of the 2024 IEEE International Conference on Cyber Security and Resilience, CSR 2024, London, UK, 2–4 September 2024; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2024; pp. 1–8. [Google Scholar] [CrossRef]
- Bhardwaj, A.; Singh, A.; Kaur, A. A Review on Machine Learning Algorithms for Intrusion Detection Systems in IoT Networks. Comput. Secur. 2021, 102, 102139. [Google Scholar] [CrossRef]
- Boualouache, A.; Engel, T. A Survey on Machine Learning-Based Misbehavior Detection Systems for 5G and Beyond Vehicular Networks. IEEE Commun. Surv. Tutor. 2023, 25, 1128–1172. [Google Scholar] [CrossRef]
- Alsarhan, A.; Alauthman, M.; Alshdaifat, E.; Alghuwairi, A.; Al-Dubai, A. Machine Learning-Driven Optimization for SVM-Based Intrusion Detection System in Vehicular Ad Hoc Networks. J. Ambient Intell. Humaniz. Comput. 2023, 14, 6113–6122. [Google Scholar] [CrossRef]
- Banafshehvaragh, S.T.; Rahmani, A.M. Intrusion, Anomaly, and Attack Detection in Smart Vehicles. Microprocess. Microsyst. 2023, 96, 104726. [Google Scholar] [CrossRef]
- Yang, L.; Moubayed, A.; Shami, A. MTH-IDS: A Multi-Tiered Hybrid Intrusion Detection System for Internet of Vehicles. IEEE Internet Things J. 2022, 9, 616–632. [Google Scholar] [CrossRef]
- Anand, M.; Kumar, S.P.; Selvi, M.; SVN, S.K.; Ram, G.D.; Kannan, A. Deep Learning Model-Based IDS for Detecting Cyber Attacks in IoT-Based Smart Vehicle Networks. In Proceedings of the 2023 International Conference on Sustainable Computing and Data Communication Systems (ICSCDS), Chennai, India, 23–25 March 2023; pp. 281–286. [Google Scholar]
- Lampe, B.E.; Meng, W. Intrusion Detection in the Automotive Domain: A Comprehensive Review. IEEE Commun. Surv. Tutor. 2023, 25, 2356–2426. [Google Scholar] [CrossRef]
- Haddaji, A.; Ayed, S.; Chaari Fourati, L.; Merghem Boulahia, L. Investigation of Security Threat Datasets for Intra- and Inter-Vehicular Environments. Sensors 2024, 24, 3431. [Google Scholar] [CrossRef] [PubMed]
- Gu, X.; Wu, Q.; Fan, P.; Cheng, N.; Chen, W.; Letaief, K.B. DRL-based federated self-supervised learning for task offloading and resource allocation in ISAC-enabled vehicle edge computing. Digit. Commun. Netw. 2024; in press. [Google Scholar] [CrossRef]
- Tran, A.T.; Luong, T.D.; Huynh, V.N. A Comprehensive Survey and Taxonomy on Privacy-Preserving Deep Learning. Neurocomputing 2024, 576, 127345. [Google Scholar] [CrossRef]
- Alalwany, E.; Mahgoub, I. An Effective Ensemble Learning-Based Real-Time Intrusion Detection Scheme for an In-Vehicle Network. Electronics 2024, 13, 919. [Google Scholar] [CrossRef]
- Xiao, J.; Chen, H.; Zhong, F. A Novel Feature Extraction Framework Using Graph Node Attention Network for In-Vehicle Networks Intrusion Detection. IEEE Syst. J. 2024, 18, 150–161. [Google Scholar] [CrossRef]
- Hussein, N.H.; Yaw, C.T.; Koh, S.P.; Tiong, S.K.; Chong, K.H. A Comprehensive Survey on Vehicular Networking: Communications, Applications, Challenges, and Upcoming Research Directions. IEEE Access 2022, 10, 86127–86180. [Google Scholar] [CrossRef]
- Kandali, K.; Bennis, L.; Bannay, O.E.; Bennis, H. An Intelligent Machine Learning Based Routing Scheme for VANET. IEEE Access 2022, 10, 74318–74333. [Google Scholar] [CrossRef]
- Alalwany, E.; Mahgoub, I. Security and Trust Management in the Internet of Vehicles (IoV): Challenges and Machine Learning Solutions. Sensors 2024, 24, 368. [Google Scholar] [CrossRef] [PubMed]
- Mchergui, A.; Moulahi, T.; Zeadally, S. Survey on Artificial Intelligence (AI) Techniques for Vehicular Ad-hoc Networks (VANETs). Veh. Commun. 2022, 34, 100403. [Google Scholar] [CrossRef]
- Albogami, N.N. Intelligent Deep Federated Learning Model for Enhancing Security in Internet of Things Enabled Edge Computing Environment. Sci. Rep. 2025, 15, 4041. [Google Scholar] [CrossRef] [PubMed]
- Rakhmanov, A.; Wiseman, Y. Compression of GNSS Data with the Aim of Speeding up Communication to Autonomous Vehicles. Remote Sens. 2023, 15, 2165. [Google Scholar] [CrossRef]



| Challenge | Description |
|---|---|
| Vulnerability to Cyber-Attacks | High connectivity and data exchange among numerous entities make IoV susceptible to cyber-attacks such as data breaches, malware infections, man-in-the-middle attacks, and DoS attacks. |
| Secure Data Management | Managing and protecting vast amounts of data generated by IoV from unauthorized access, ensuring data privacy, and safeguarding sensitive information related to vehicle locations and user identities. |
| Dynamic and Decentralized Nature | The dynamic and decentralized nature of IoV networks complicates the implementation of robust security measures, making it difficult to promptly detect and mitigate security threats. |
| Heterogeneity of IoV Components | Interoperability and compatibility issues due to various types of vehicles, communication protocols, and sensors, which can create security loopholes that attackers may exploit. |
| Work | Reviewed Work | Focus | Limitation | Recommendation |
|---|---|---|---|---|
| [35] | 17 | Within the structure of IoV, the focus is on employing ML to ensure and enhance secure vehicular communications. | The significant processing requirements and changing environmental issues restrict the immediate application of proposed solutions. | The primary focus of future research should be on lightweight models and enhanced edge computing solutions for IoV. |
| [38] | 93 | Explores machine learning techniques for managing security issues in vehicular networks. | In vehicular applications, adversarial risks, increased latency, and computational costs present challenges for current ML models. | Future research should focus on adversarial resilient, lightweight, and energy-efficient ML models adapted for vehicular network contexts. |
| [36] | 27 | It highlights the application of DL in the management of extensive data analytics for fully or partially autonomous vehicles. | The advancement and empirical validation of DL models for automotive applications is impeded by the lack of publicly accessible IoV datasets. | Providing open IoV data sources and employing advanced DL architectures such as memory-augmented networks and generative adversarial networks is essential. |
| [10] | 61 | The study explores machine learning and deep reinforcement learning approaches, including transformers and transfer learning, to accurately identify deficiencies in the CAN protocol. | Implementing advanced DL models in vehicle security is constrained by challenges related to computing efficiency and the scarcity of real-world CAN datasets. | Future research should focus on creating dependable public datasets and exploring energy-efficient DL techniques tailored for CAN-based IDS. |
| [11] | 22 | Blockchain-enabled Federated Learning (FL) for IoVs. | Limited real-world datasets and vulnerability to adversarial attacks. | Recommending robust consensus mechanisms, privacy-preserving techniques, and diverse testing frameworks. |
| [37] | 42 | Investigates IDS for in-vehicle networks, emphasizing hybrid, payload-based, and flow-based methodologies designed to protect CAN. | Present IDS methodologies often inadequately detect novel threats, and the absence of standardized testing datasets constrains their efficacy. | Prospective studies must concentrate on standardized datasets, enhanced detection of complex threats, and the development of efficient, lightweight IDS systems. |
| This survey | 56 | This study presents a detailed performance analysis of key ensemble learning strategies bagging, boosting, stacking, and voting applied to multiclass intrusion detection problems within IoV. Various real-world datasets (e.g., CICIoTV2022, TON_IoV, VeReMi) are used to benchmark these models across critical metrics such as accuracy, F1-score, precision, recall, AUC, and computational efficiency. Both baseline and optimized versions (e.g., with PSO, GA, Bayesian tuning) are included to reflect real-time applicability. | Although ensemble learning methods for multi-class IDS in the IoV are extensively investigated in this survey, it does not particularly address energy efficiency and lightweight implementation for limited IoV systems, a subject covered in some previous surveys. Moreover, adversarial resilience models examined in other works are not fully addressed in this work. Furthermore, limited research of the scalability and real-time performance of ensemble models in large-scale IoV environments. | Future research should emphasize lightweight and scalable ensemble learning frameworks, integrating decentralized methods (e.g., federated learning) for real-time, resource-constrained IoV networks. Additionally, Future study should focus on investigating more benchmarks datasets that use ensemble learning methods for attack detection. |
| Study | Techniques Used | Key Features | Advantages | Limitations | Key Contributions | Findings |
|---|---|---|---|---|---|---|
| [39] | Ensemble Transfer Learning, Explainable Artificial Intelligence (XAI) | Designed for detecting zero-day attacks in IoV environments with enhanced interpretability. | Improved detection of previously unseen attacks; provides explanations for model decisions. | Potential computational complexity due to ensemble and transfer learning integration | Introduces an explainable ensemble model tailored for IoV, addressing the challenge of zero-day attack detection. | Demonstrated high accuracy in identifying zero-day attacks with added model transparency. |
| [40] | Feature Augmented Convolutional Neural Network (FA-CNN), Deep Autoencoder, Ensemble Learning | Combines FA-CNN and Deep Autoencoder to enhance packet flow classification in Network Intrusion Detection Systems (NIDS) | Achieves high detection accuracy, particularly for minority attack classes; improves overall NIDS efficiency. | May face scalability issues with extremely large datasets; requires careful tuning of ensemble components. | Proposes a novel ensemble approach integrating feature augmentation and deep learning for robust intrusion detection. | Achieved 97% accuracy on NSL-KDD and 95% on CICIDS2017 datasets, outperforming existing methods. |
| [41] | Random Forest, Decision Tree, K-Nearest Neighbors, XGBoost, Logistic Regression (as meta-model), Correlation-Based Feature Selection, Embedded Feature Selection | Utilizes a stacking ensemble approach with advanced feature selection to enhance intrusion detection. | Achieves high performance with an accuracy of 99.99% on both NSL-KDD and CIC-IDS datasets; effectively handles imbalanced datasets using SMOTE-Tomek technique | The complexity of the ensemble model may lead to increased computational requirements; potential overfitting if not properly validated. | Introduces a comprehensive ensemble framework combining multiple classifiers and feature selection methods for robust intrusion detection. | Demonstrated superior performance compared to individual models, with enhanced detection rates and reduced false positives. |
| [42] | LightGBM, Extra Trees, XGBoost, Bayesian Optimization | Correlation-based feature selection, SMOTE | High accuracy, handles imbalanced data | Computationally intensive | Optimized ML-based IDS for IoV using LightGBM, ET, and XGBoost | High accuracy with improved performance over traditional methods |
| [43] | non-tree-based ensemble methods, such as ensemble averaging or bagging, applied in IDS for autonomous vehicles | Feature extraction, model ensemble | Reduced false positives, high precision | High resource demand | Non-tree-based ensemble methods for intrusion detection in autonomous vehicles | Effective in identifying intrusions with reduced false positives |
| [44] | Correlation-based feature selection, SMOTE with ensemble approaches like Random Forest or GBMachines | Feature selection, data preprocessing | Improved model accuracy, handles data imbalance | Potential overfitting | Feature extraction and selection for enhanced IDS performance | Improved model accuracy and handling of data imbalance issues |
| [45] | Federated ensemble learning, include tree-based ensembles or hybrid ensemble methods mesh satellite nets | Distributed learning, privacy preservation | Enhanced privacy, scalable | Latency issues | Federated learning-assisted IDS for privacy and scalability in autonomous vehicles | Enhanced privacy and scalability, though latency issues persist |
| [46] | Logistic Regression, Random Forest, DT | Hyperparameter optimization, ensemble learning | High accuracy, low false positives | Requires extensive tuning | Optimized Ensemble ML approach for intrusion detection in IoV | High accuracy with low false positive rates |
| [47] | Stacking Ensemble: Combines multiple models optimized for specific attack detection (e.g., LSTM for flooding, DTs for replay attacks) | Multimodal approach for binary and multiclass classification | High detection accuracy (97%) for multiple intrusion types. Effective for handling unbalanced datasets. | Computationally intensive for real-time operations. Requires extensive preprocessing and feature engineering. Limited scalability in larger IoV environments. | Developed a heterogeneous ensemble model tailored for UAV-based IoV systems. Introduced SHAP-based explainability to identify key features of attacks. Validated effectiveness through experiments on simulated CAN datasets. | Ensemble models showed high accuracy in detecting attacks (e.g., DoS, replay, fuzzy attacks). Demonstrated the practical utility of ensemble learning for UAV network security. |
| [48] | Stacked ensemble learning | Model stacking, ensemble methods | High detection accuracy | Real-time processing challenges | Stacked ensemble learning IDS model for software-defined VANETs | High detection accuracy, yet challenges in real-time processing |
| [49] | Boosting methods, hyperparameter optimization | Ensemble learning, boosting | High accuracy | Handling real-time network traffic | IDS for cyberattacks in IoV environment using advanced boosting methods | High accuracy, though challenges in handling real-time network traffic remain |
| [50] | Tree-based Models: DT (DT), Random Forest (RF), Extra Trees (ET), and XGBoost. Stacking: Combines outputs of the base learners to improve accuracy. | Multi-tiered architecture handles both known and unknown attacks. Data preprocessing includes k-means clustering, SMOTE for class imbalance, and feature engineering (IG, FCBF, KPCA). High scalability and adaptability to dynamic IoV environments | Achieves high accuracy for known attacks (up to 99.999% on the CAN dataset). Efficient detection of zero-day attacks with high F1-scores (0.963 and 0.800 on two datasets). Real-time applicability with processing times <0.6 ms per data packet | Computationally intensive during training. Relies on high-quality, representative datasets. Potential for misclassification in highly noisy environments | Novel combination of signature-based and anomaly-based IDS components. Optimization techniques improve detection accuracy and execution efficiency. Validated on benchmark datasets: CAN-intrusion and CICIDS2017 | Demonstrates feasibility for real-world vehicle-level deployment. |
| [51] | Leader Class and Confidence Decision Ensemble (LCCDE): Combines XGBoost, LightGBM, and CatBoost | Multi-model ensemble adapts dynamically to different attack types. | High accuracy in classifying cyber-attacks; adaptable to diverse datasets. | Computationally expensive due to model selection for each attack class. | Proposed a novel ensemble method for combining diverse models based on confidence for each attack class. | >98% detection rate; demonstrated superior adaptability to attack types in IoV. |
| [52] | Sensory anomaly detection, ensemble methods | Mixed sensory data analysis | Improved detection rates | Real-time deployment challenges | Single and mixed sensory anomaly detection in connected and automated vehicle sensor networks | Improved detection rates for single and mixed sensory data |
| [53] | Collaborative learning (Ensemble), cloud-vehicle integration | Collaborative architecture between cloud and vehicle systems for efficient intrusion detection. Capability to handle data heterogeneity and facilitate model transplantation across different vehicle platforms | Achieves high detection accuracy for multiple attack types. Reduces computational burden on individual vehicles by leveraging cloud resource | Potential latency due to reliance on cloud infrastructure. Requires robust communication channels between vehicles and the cloud | Introduces a collaborative IDS framework that addresses data heterogeneity in IoV environments. Demonstrates the effectiveness of multi-dimensional feature analysis for intrusion detection | Extensive experiments on vehicles of different brands confirm the robustness and efficiency of CVMIDS |
| [54] | Machine learning algorithms, ensemble learning | Traffic data analysis | Improved traffic congestion detection | Scalability issues | Machine learning for traffic congestion detection and prediction in VANETs | Improved traffic congestion detection and prediction |
| [55] | Transfer learning ensemble learning-based IDS combined with optimized CNNs. | Reduces training time by leveraging pre-trained models; effective for high-dimensional data. | High accuracy with reduced computational overhead. | Limited generalization to unknown datasets outside the IoV scope. | Demonstrated the feasibility of transfer learning for IDS in IoV systems, significantly reducing training complexity. | >99.25% detection rate and F1-score; effective in detecting IoV-related cyber-attacks. |
| [56] | Federated ensemble learning combined with class-incremental learning for life-long intrusion detection. | Continuously adapts to new threats with minimal retraining. | Effectively handles dynamic and evolving IoV environments; reduces reliance on centralized datasets. | Complexity in managing decentralized model updates across networks. | Introduced a novel approach combining federated learning with life-long learning for handling new and unknown attack patterns. | Maintained high accuracy (~97%) and low false positive rates across evolving threats. |
| [57] | Random Forest, GBM, AdaBoost ensemble learners | Aggregates predictions, iterative refinement | High accuracy, reduces false positives | Computational complexity | Misbehavior-aware on-demand collaborative IDS using distributed ensemble learning | High accuracy reduces false positives. |
| [58] | LSTM-based hybrid IDS based on ensemble learning | Sequential data processing, hybrid models | Improved detection of sequential anomalies | Training complexity | Hybrid intrusion detection system for IoV using LSTM | Improved detection of sequential anomalies |
| [59] | Hyper-Tuned Random Forest | Hyperparameter optimization, ensemble methods | High accuracy, reduced false positives | Scalability concerns | Novel hyper-tuned ensemble random forest for detecting false basic safety messages | High accuracy, reduced false positives. |
| [60] | Tree-Based Ensemble Network | Combines multi-class classification with tree-based ensembles. | High detection accuracy, interpretable results. | May lack scalability for large datasets. | Developed a tree-based ensemble for IoV IDS, showing improved multi-class detection capabilities. | Demonstrated superior performance over traditional single models in IoV security applications. |
| [61] | Privacy-preserving ensemble IDS | Integrates federated learning for decentralized data processing. | Ensures data privacy while maintaining detection accuracy. | Communication overhead in federated environments. | Combined federated learning with ensemble methods for intrusion detection in privacy-sensitive IoV scenarios. | Maintained privacy without sacrificing detection accuracy. |
| [62] | Clock skew-based ensemble IDS | Uses clock synchronization features for anomaly detection. | Effective real-time detection with minimal latency. | Limited evaluation on diverse datasets. | Proposed a novel clock-skew-based IDS utilizing ensemble techniques for in-vehicle networks. | Achieved effective real-time detection with low latency metrics. |
| [63] | Ensemble learning combined with gossip learning. | Distributed IDS framework for V2X environments. | Enhance detection accuracy and scalability. | Potential communication overhead. | Proposes a novel IDS framework integrating ensemble and gossip learning for V2X. | Demonstrates improved detection rates in V2X scenarios. |
| [64] | Ensemble Transfer learning with MobileNetV2 and hyper-parameter optimization. | Lightweight model suitable for resource-constrained environments. | Efficient detection with reduced computational resources. | Potential challenges in handling novel attack types. | Developed a lightweight IDS leveraging transfer learning for IoV. | Demonstrated effective intrusion detection with minimal resource usage. |
| [65] | Integrates federated learning with diverse machine learning models across multiple devices, which resembles an ensemble-like architecture at the system level, SMOTE for class imbalance, outlier detection, hyperparameter tuning. | Privacy-preserving, decentralized framework with robust handling of imbalanced and noisy data. | Ensures data privacy, improves detection rates, and scales efficiently across IoV devices. | Communication overhead, complexity in integration. | Proposes a federated learning-based IDS tailored for IoV, integrating privacy-preserving and robust techniques. | Achieves high intrusion detection performance while maintaining data privacy and scalability in IoV. |
| [66] | Improved Random Forest Classifier (IRFC), Extra Trees ensemble learning | Optimized feature selection, ensemble-based architecture, tested on CI-CIDS 2018 dataset | High accuracy (~99%), low false positive rate, suitable for real-time detection, computationally efficient | Limited to a single dataset, lacks evaluation in live or adaptive IoV scenarios | Introduced hybrid IRFC + Extra Trees model, improved feature selection and hyperparameter tuning, practical for edge-based intrusion detection | Achieved 99% detection accuracy; demonstrated improved robustness and real-time feasibility for IoV IDS |
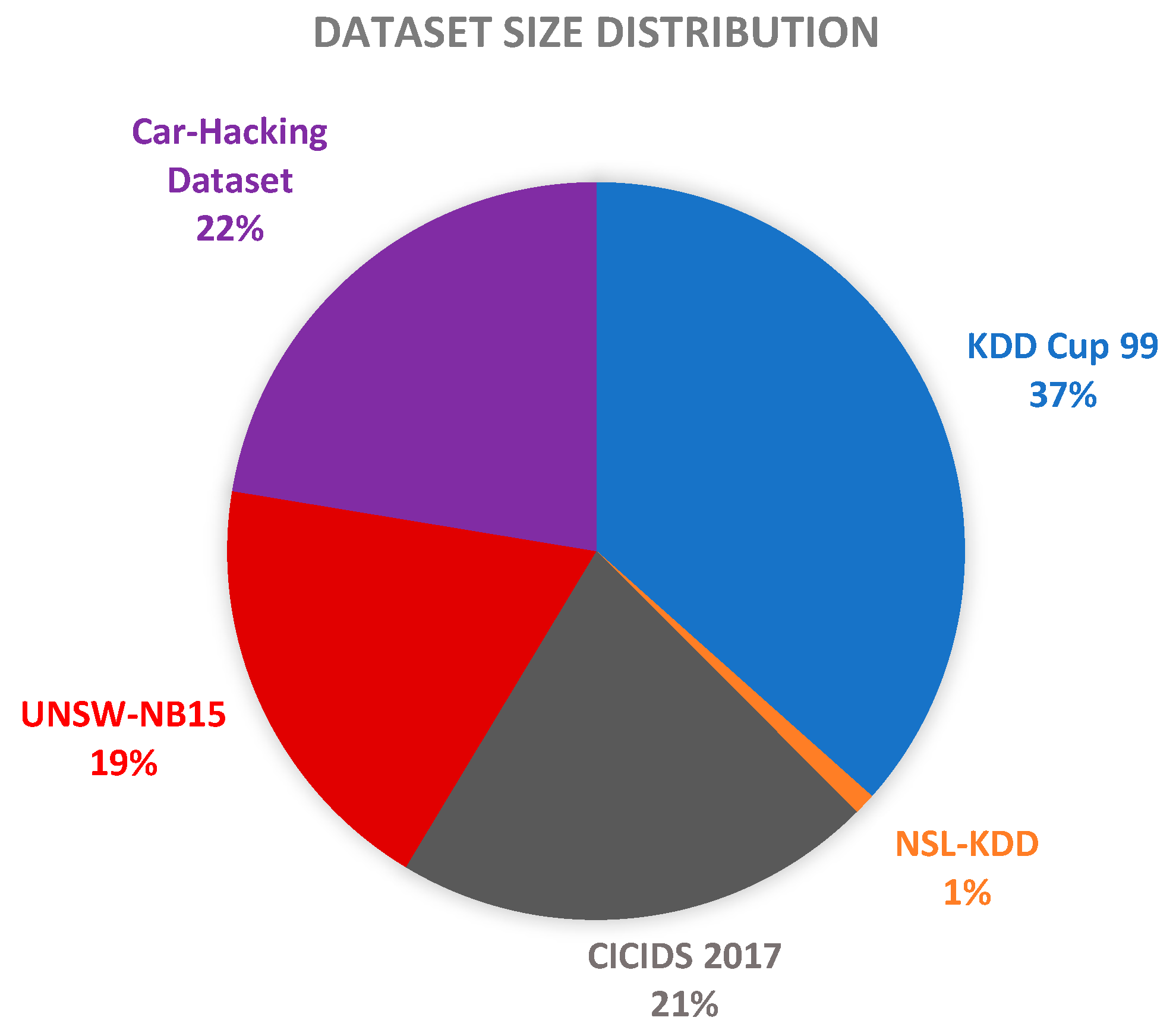
| Dataset | Description | Size | Features | Work |
|---|---|---|---|---|
| KDD Cup 99 | Contains a wide range of network intrusion types | 4,898,431 | 41 features, multiple attack types | [74,80] |
| NSL-KDD | An improved version of KDD Cup 99 with fewer duplicates | 125,973 | 41 features, balanced data | [81,82] |
| CICIDS 2017 | Includes benign and up-to-date common attack scenarios | 2,830,743 | 80 features, time-based analysis | [69,83] |
| UNSW-NB15 | Provides modern normal and attack behaviour | 2,540,044 | 49 features, diverse attack scenarios | [57,59] |
| Car-Hacking Dataset | Focused on vehicular network security | 3,000,000 | Multiple CAN bus signals | [75,77] |
| Study | Algorithms Employed | Detection Rate (%) | False Alarm Rate (%) | Key Insights | Practical Implications |
|---|---|---|---|---|---|
| [57] | Random Forest, GBM, AdaBoost | 98.7 | 2.3 | High accuracy reduces false positives. | Effective in dynamic IoV environments, computationally intensive |
| [82] | Federated Ensemble Learning | 97.9 | 3.1 | Enhance privacy and scalability | Suitable for decentralized systems, challenges in coordination |
| [59] | Hyper-Tuned Random Forest | 99.2 | 1.8 | High accuracy, reduced false positives. | Effective for real-time detection, scalability concerns |
| [69] | RF, CNN ensembled together | 98.5 | 2.5 | Robust detection reduces false positives. | Robust in handling high-dimensional data, real-time challenges |
| [75] | DNNs, GNNs | 99.0 | 1.9 | High accuracy, detects complex patterns. | Suitable for complex attack patterns, scalability issues |
| [81] | Machine Learning-Based Routing | 97.3 | 3.2 | Improved routing efficiency | Effective for VANET routing, implementation complexity |
| [79] | Graph Node Attention Network | 98.8 | 2.2 | High accuracy identifies complex relationships. | Effective feature extraction, scalability issues |
| [50] | GRIPCA, OWELM | 99.1 | 1.7 | High detection accuracy, efficient learning | Suitable for real-time detection, implementation complexity |
| [58] | LSTM-based hybrid IDS | 97.5 | 1.9 | Combines LSTM with hybrid methods for improved detection accuracy | Demonstrates potential for high accuracy in detecting complex intrusion patterns in IoV environments |
| [48] | Stacked ensemble learning | 97.5 | 1.8 | High detection accuracy with stacked ensemble methods | Highlights computational challenges for real-time processing due to high demands |
| [45] | Federated learning, mesh satellite nets | 95.9 | 2.5 | Enhanced scalability and privacy in IDS deployment through federated learning | Illustrates the scalability and privacy benefits of federated learning in IoV |
| [73] | Deep neural networks, two-stage classification | 97.9 | 1.6 | High classification accuracy for smart vehicle networks | Highlights the potential and challenges of using DL for IDS in smart vehicle networks |
| [43] | Non-tree-based ensemble methods | 96.5 | 2.1 | Higher precision with reduced false positives | Highlights the benefits of ensemble learning in reducing false positives and improving detection accuracy |
| [71] | Recursive Feature Elimination (RFE), PCA | 96.7 | 2.0 | Enhanced performance through dimensionality reduction | Demonstrates the role of feature reduction in improving IDS efficiency |
| [84] | Sensory anomaly detection, ensemble methods | 96.9 | 2.3 | Improved detection rates for sensory data | Emphasizes the importance of handling mixed sensory data in connected and automated vehicle networks |
| [49] | Boosting methods, hyperparameter optimization | 98.0 | 1.7 | High accuracy with challenges in handling real-time network traffic | Points out the difficulty in managing real-time traffic with advanced boosting methods |
| [42] | LightGBM, Extra Trees, XGBoost | 98.2 | 1.3 | Significant performance improvement through optimized ML-based IDS | Demonstrates the potential for enhanced security in IoV environments through advanced ML techniques |
| [53] | Collaborative learning, cloud-vehicle integration | 97.6 | 1.9 | Real-time adaptability, enhanced detection accuracy | Demonstrates the benefits of collaborative learning in achieving real-time adaptability in IDS for IoV |
| [54] | Machine learning algorithms, ensemble learning | 96.4 | 2.2 | Improved traffic congestion detection and prediction through machine learning | Highlights the role of machine learning in enhancing traffic management in VANETs |
| [44] | Feature selection, SMOTE | 97.8 | 1.6 | Improved accuracy and data imbalance handling through advanced feature selection and preprocessing | Emphasizes the importance of data preprocessing in enhancing IDS performance |
| [51] | DL, adaptability frameworks | 97.4 | 1.8 | High adaptability and detection accuracy for zero-day attacks | Points out the effectiveness of adaptable DL methods in managing emerging cyber threats |
| [46] | Logistic Regression, Random Forest, DT | 97.3 | 1.4 | Improved detection accuracy through extensive hyperparameter optimization | Shows the necessity of parameter tuning for achieving high performance in IDS |
| [72] | Hybrid IDS | 97.2 | 1.5 | High precision in detecting known and unknown attacks through hybrid detection techniques | Shows the effectiveness of hybrid methods in enhancing detection capabilities |
| [62] | Clock skew analysis, real-time detection | 98.1 | 1.5 | Effective real-time detection with minimal latency through clock skew analysis | Highlights the potential of clock skew analysis in achieving real-time intrusion detection in-vehicle networks |
| Dataset | Advantages | Disadvantages | Usage Rate with Ensemble Learning | Learner Performance Indication | Targeted Attacks | Last Update | Unique Attributes | Works |
|---|---|---|---|---|---|---|---|---|
| KDD Cup 99 | Comprehensive coverage of network intrusion types. Large dataset size for training models. | Outdated for modern threats. It contains duplicate records and imbalanced classes. | Moderate (benchmarking legacy IDS models). | High accuracy but limited real-world application. | General network intrusions. | 1999 | Benchmark datasets are widely used in IDS research. Historical representation of attack patterns. | [74,80] |
| NSL-KDD | Improved version of KDD Cup 99. Balanced dataset for model evaluation. | Limited to older attack scenarios. Still lacks IoV-specific data. | High (benchmark dataset for balanced ML models). | Moderate performance; supports better generalization. | General network intrusions. | 2009 | Balanced and cleaned version of KDD Cup 99. Reduces duplicate records for fair evaluation. | [78,81] |
| CICIDS 2017 | Includes modern, diverse attack scenarios. Rich feature set for time-based analysis. | Computationally intensive due to size and feature complexity. | High (modern IoV IDS research). | High precision and recall; suited for temporal detection. | Dynamic and temporal attack patterns. | 2017 | Time-based features. Focuses on evolving attack trends in IoV. | [69,83] |
| UNSW-NB15 | Rich and diverse attack scenarios. Detailed feature representation. | High computational requirements for processing features. | Moderate (complex IDS systems). | High adaptability; supports feature-rich ensemble learning. | Advanced persistent threats (APTs). | 2015 | Broad spectrum of attack types. Emphasizes modern threat scenarios. | [57,59] |
| Car-Hacking | Specific to vehicular networks. Provides real CAN bus signals for research. | Limited generalization to non-vehicular scenarios. | Low (specialized automotive IDS). | High classification accuracy for vehicular intrusions. | Automotive network attacks (e.g., CAN bus). | Varies | Focused on vehicular security. Key for CAN bus intrusion detection. | [75,77] |
| Metric | Description | Equation |
|---|---|---|
| Accuracy | The proportion of correctly classified instances among the total instances. | |
| Precision | The proportion of true positive instances among the instances predicted as positive. | |
| Recall | The proportion of true positive instances among the actual positive instances. | |
| F1-Score | The harmonic means of precision and recall provide a balance between the two. | |
| AUC-ROC | The area under the Receiver Operating Characteristic curve, measuring the model’s ability to distinguish between classes. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alharthi, M.; Medjek, F.; Djenouri, D. Ensemble Learning Approaches for Multi-Class Intrusion Detection Systems for the Internet of Vehicles (IoV): A Comprehensive Survey. Future Internet 2025, 17, 317. https://doi.org/10.3390/fi17070317
Alharthi M, Medjek F, Djenouri D. Ensemble Learning Approaches for Multi-Class Intrusion Detection Systems for the Internet of Vehicles (IoV): A Comprehensive Survey. Future Internet. 2025; 17(7):317. https://doi.org/10.3390/fi17070317
Chicago/Turabian StyleAlharthi, Manal, Faiza Medjek, and Djamel Djenouri. 2025. "Ensemble Learning Approaches for Multi-Class Intrusion Detection Systems for the Internet of Vehicles (IoV): A Comprehensive Survey" Future Internet 17, no. 7: 317. https://doi.org/10.3390/fi17070317
APA StyleAlharthi, M., Medjek, F., & Djenouri, D. (2025). Ensemble Learning Approaches for Multi-Class Intrusion Detection Systems for the Internet of Vehicles (IoV): A Comprehensive Survey. Future Internet, 17(7), 317. https://doi.org/10.3390/fi17070317