


A Comprehensive Study and Analysis of the Third Generation Partnership Project’s 5G New Radio for Vehicle-to-Everything Communication †

 ,
,  , , and
, , and
Abstract
1. Introduction
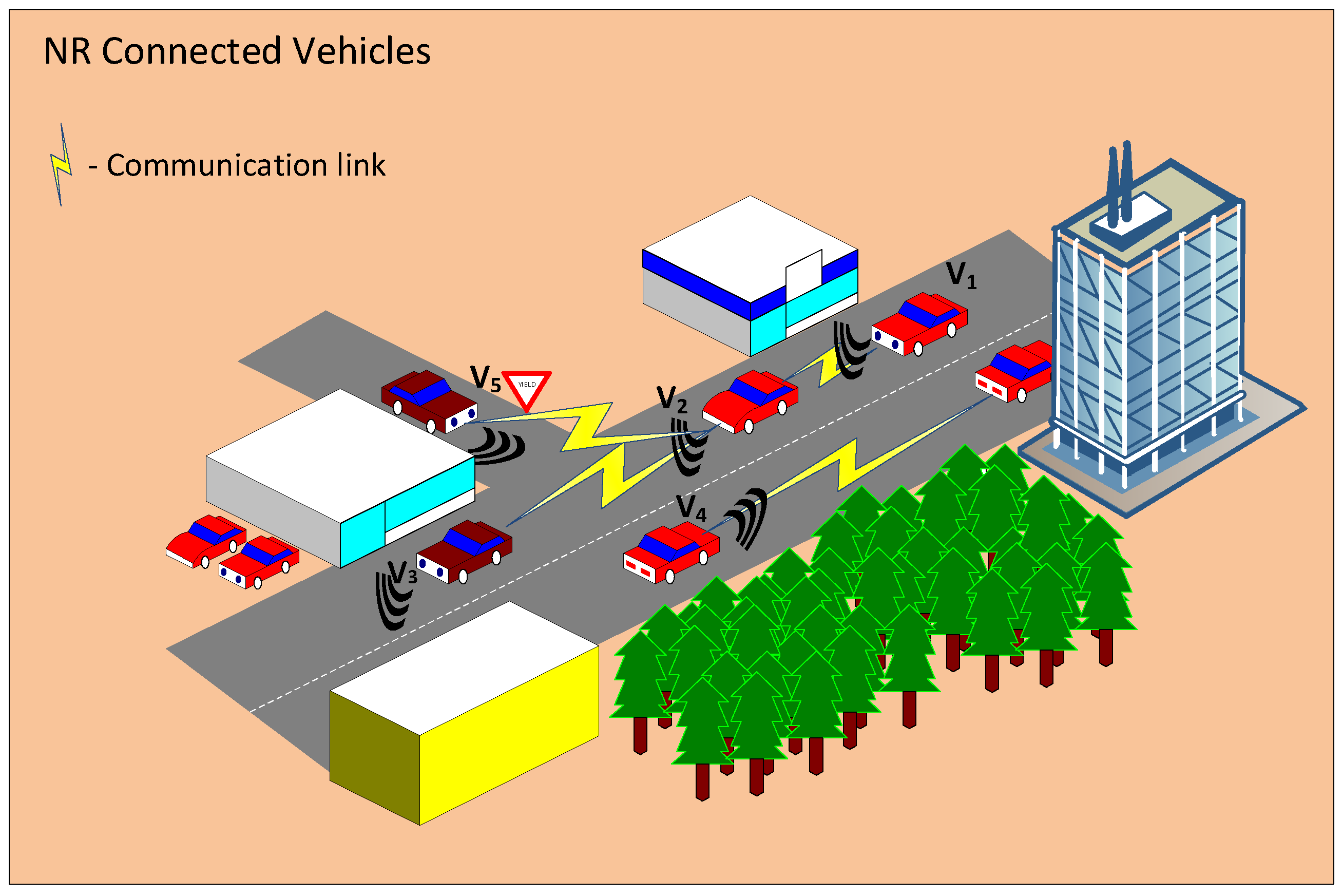
2. System Model
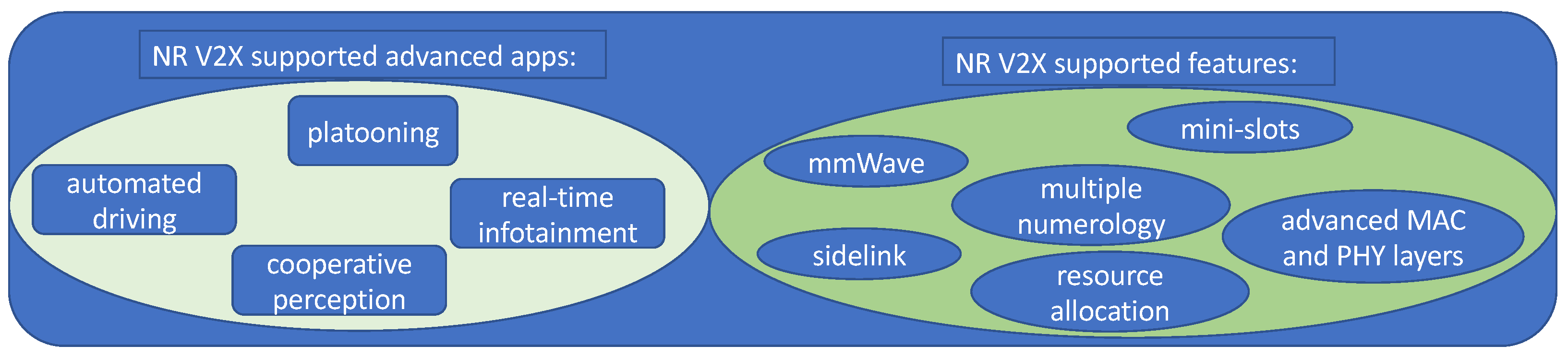
- Automated driving: A vehicle can sense the surrounding environment and can make lateral and longitudinal decisions by itself or by taking very little input from humans.
- Cooperative perception: A vehicle can increase its field of view and perception of neighbors by exchanging onboard sensory information through V2V and V2I communication.
- Platooning: A platoon of vehicles will route from the source to the destination in close proximity following the leader vehicle. The follower vehicles should not need any input from humans.
- Infotainment: Information (e.g., road maintenance updates, weather updates, etc.) and entertainment (e.g., live traffic updates, news, music, etc.) can be disseminated from one vehicle to other vehicles through V2V and/or I2V communication in a very short duration (within the order of milliseconds).
3. Problem Statement
4. Overview of DSRC, LTE C-V2X, and 5G NR V2X
4.1. DSRC
4.2. LTE C-V2X
4.3. DSRC vs. C-V2X
4.4. Challenges Faced by DSRC and C-V2X
4.5. 5G NR V2X
5. Performance Evaluation
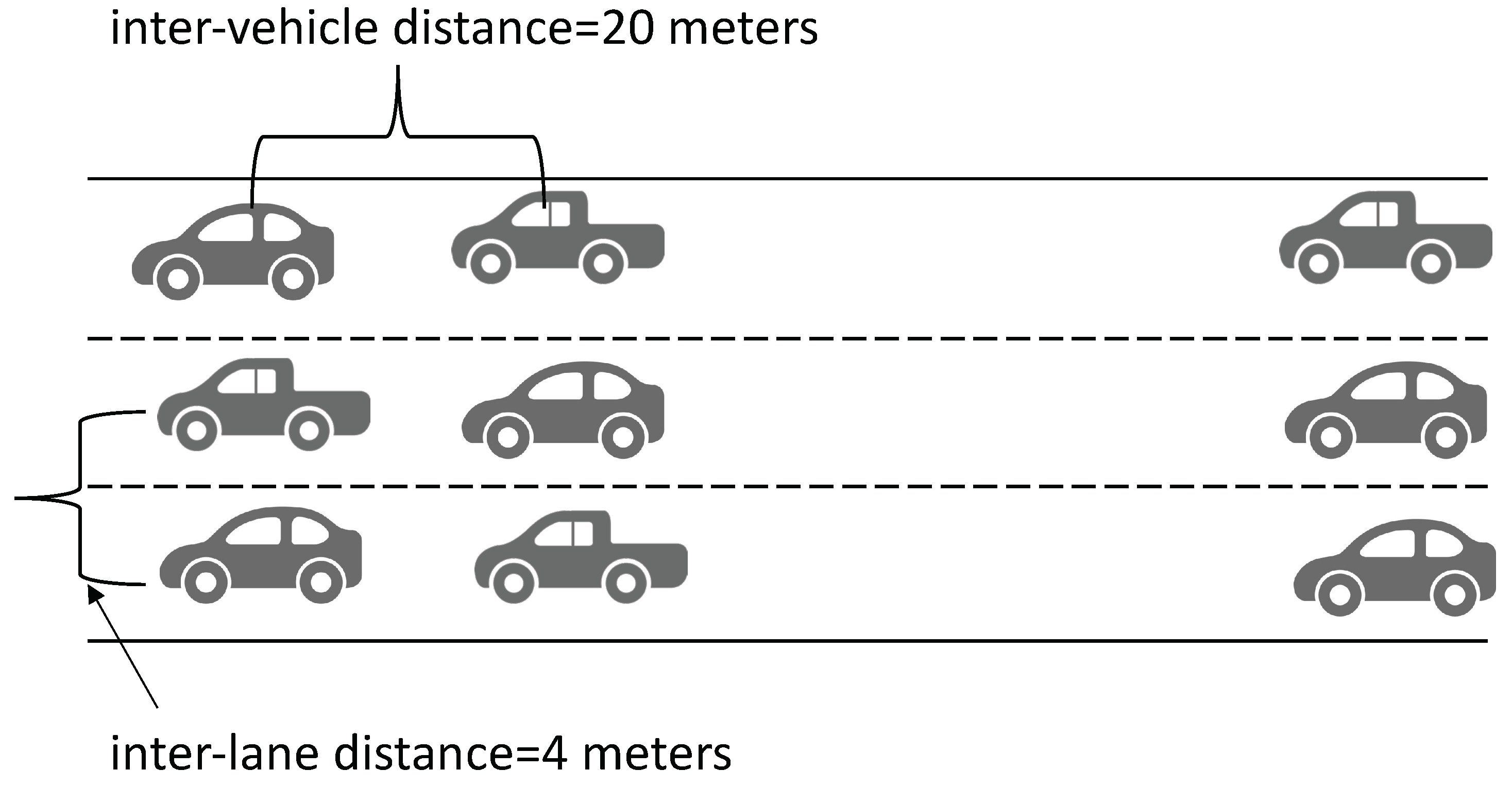
5.1. Simulation Model
5.2. Performance Metrics
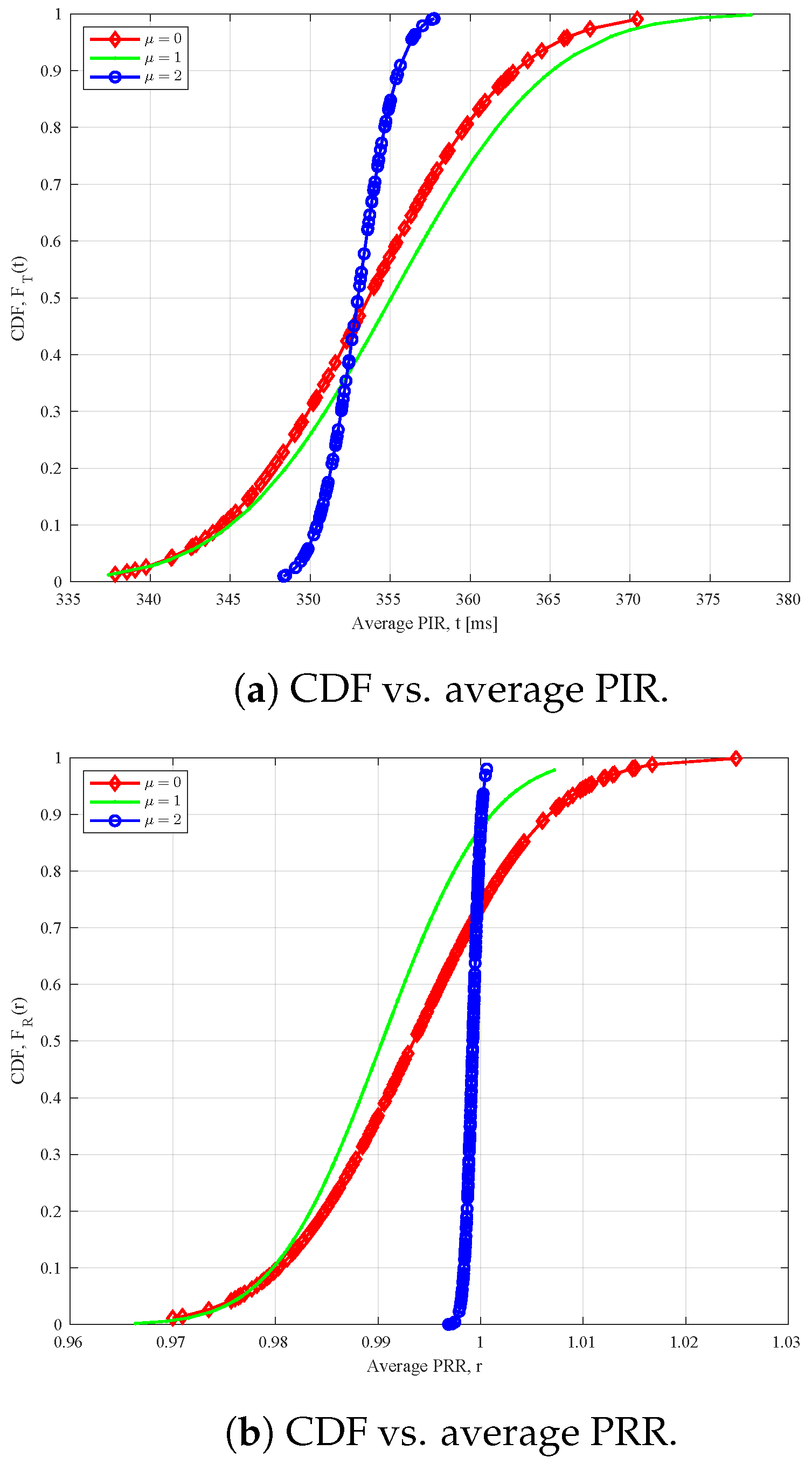
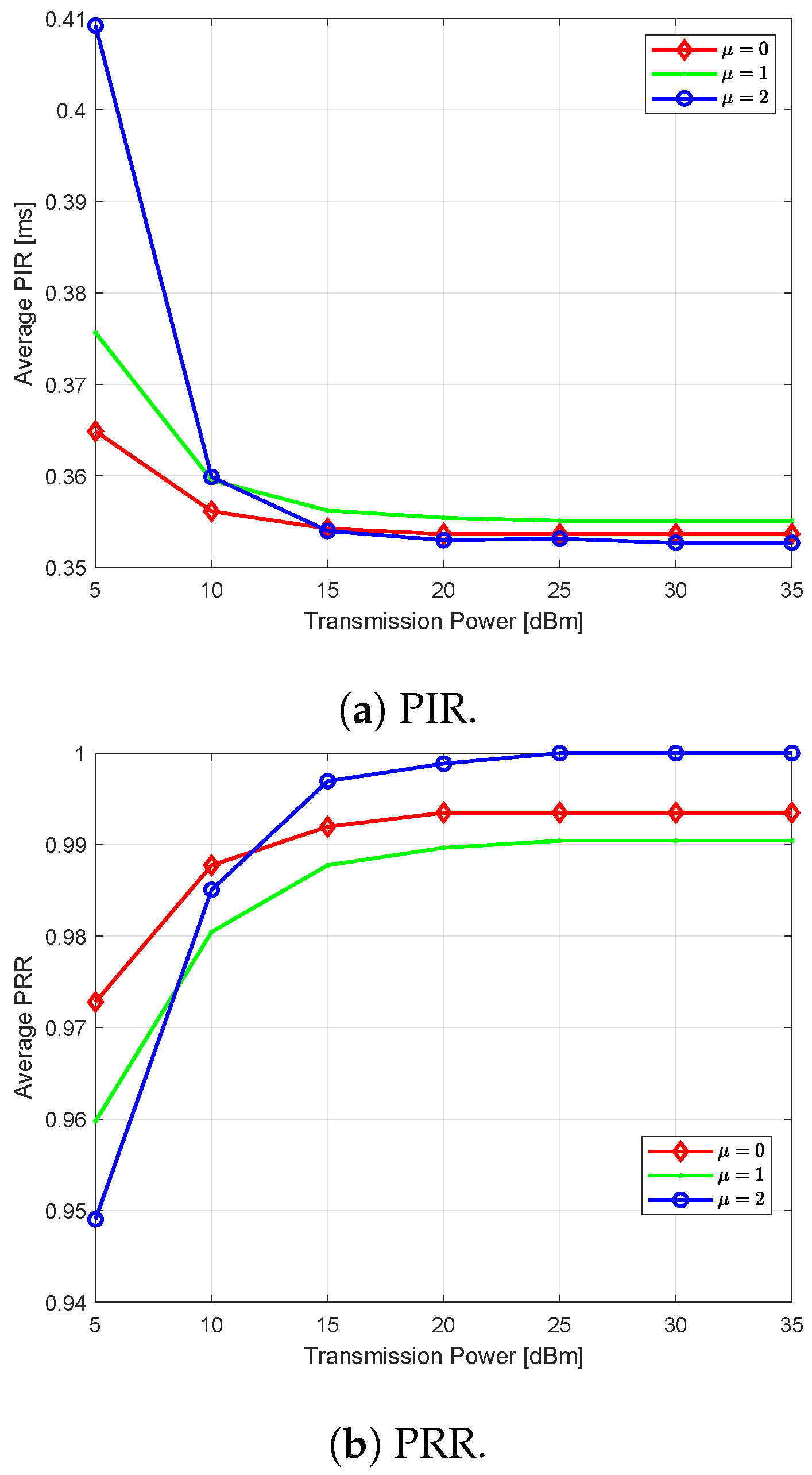
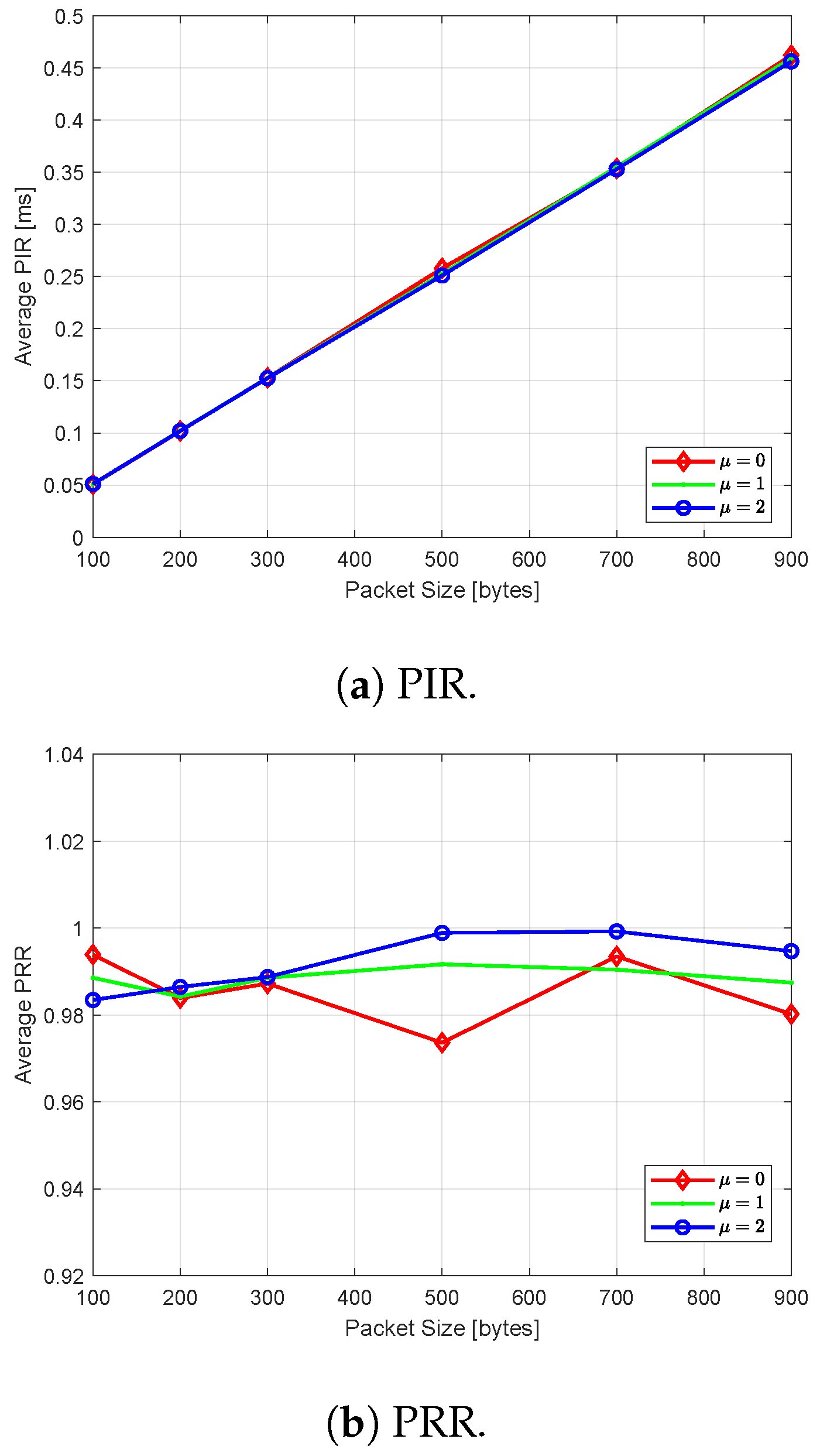
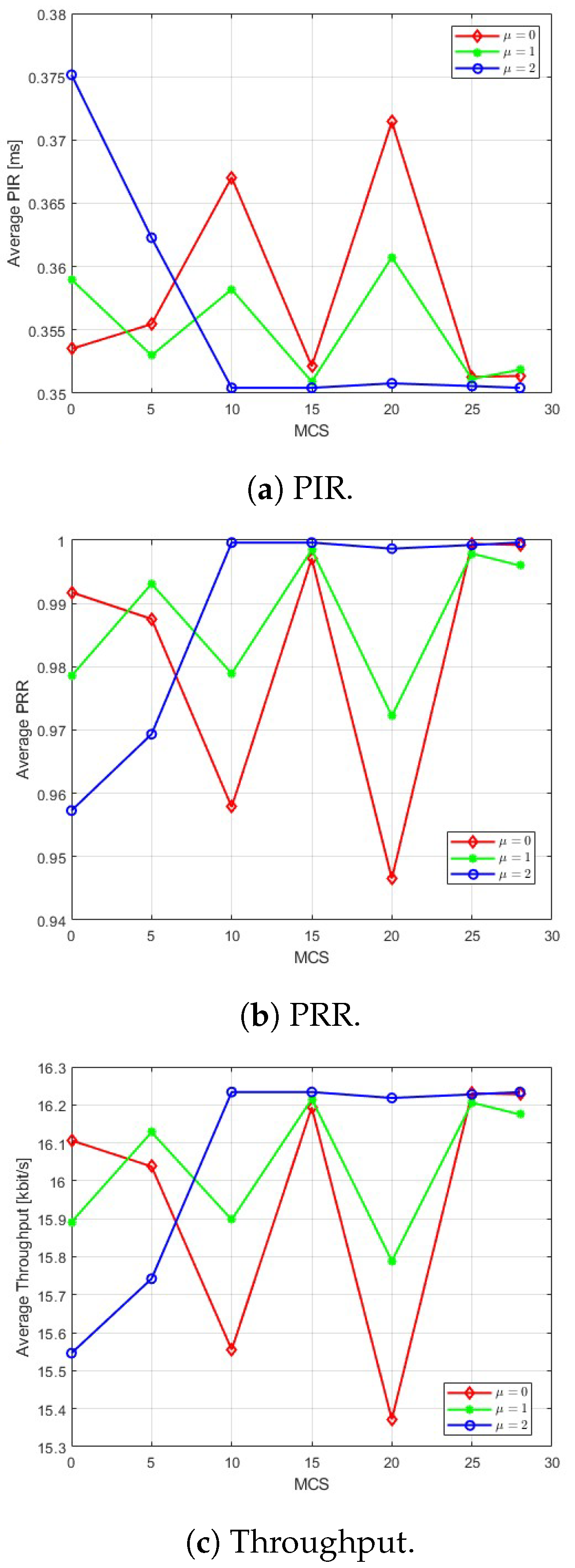
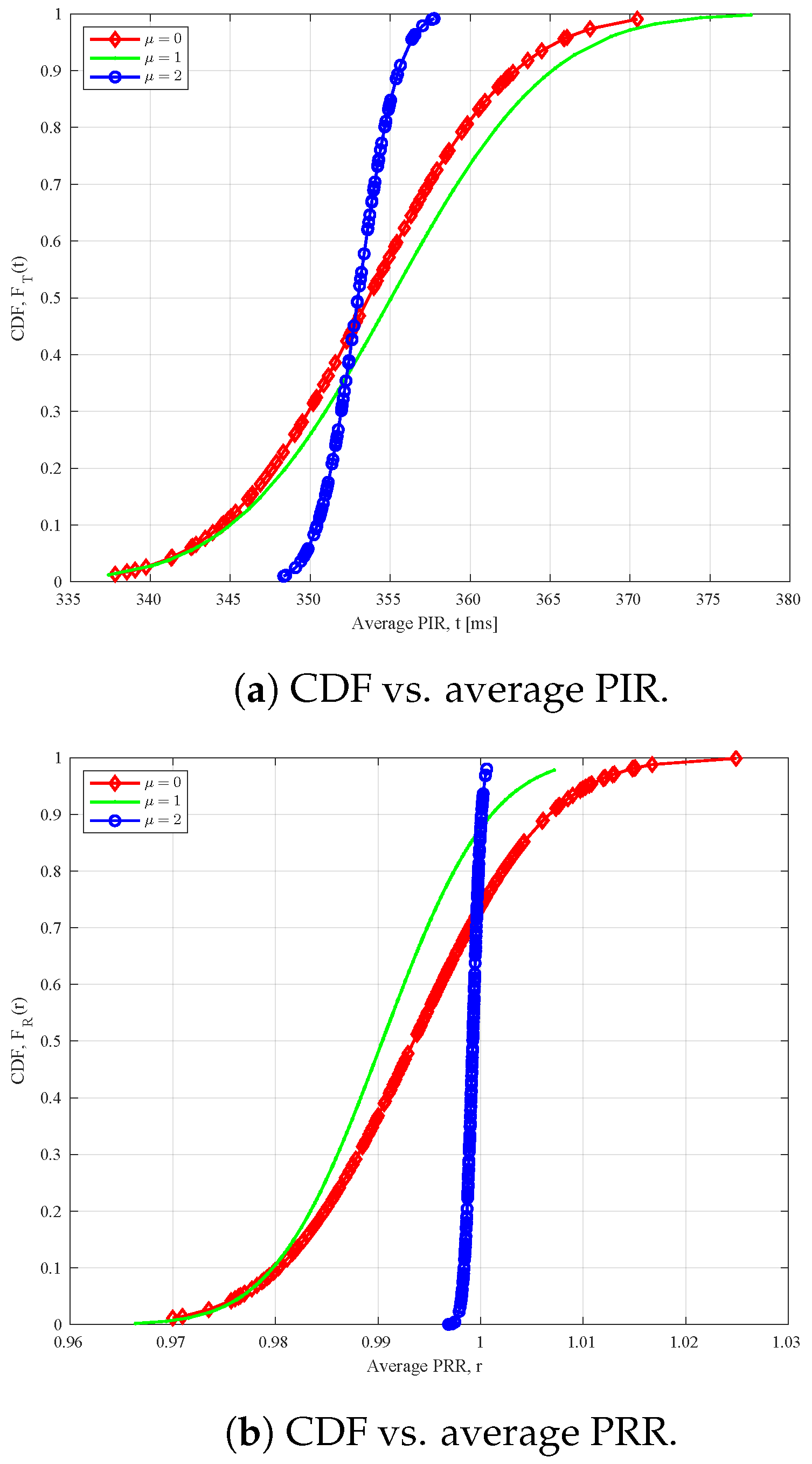
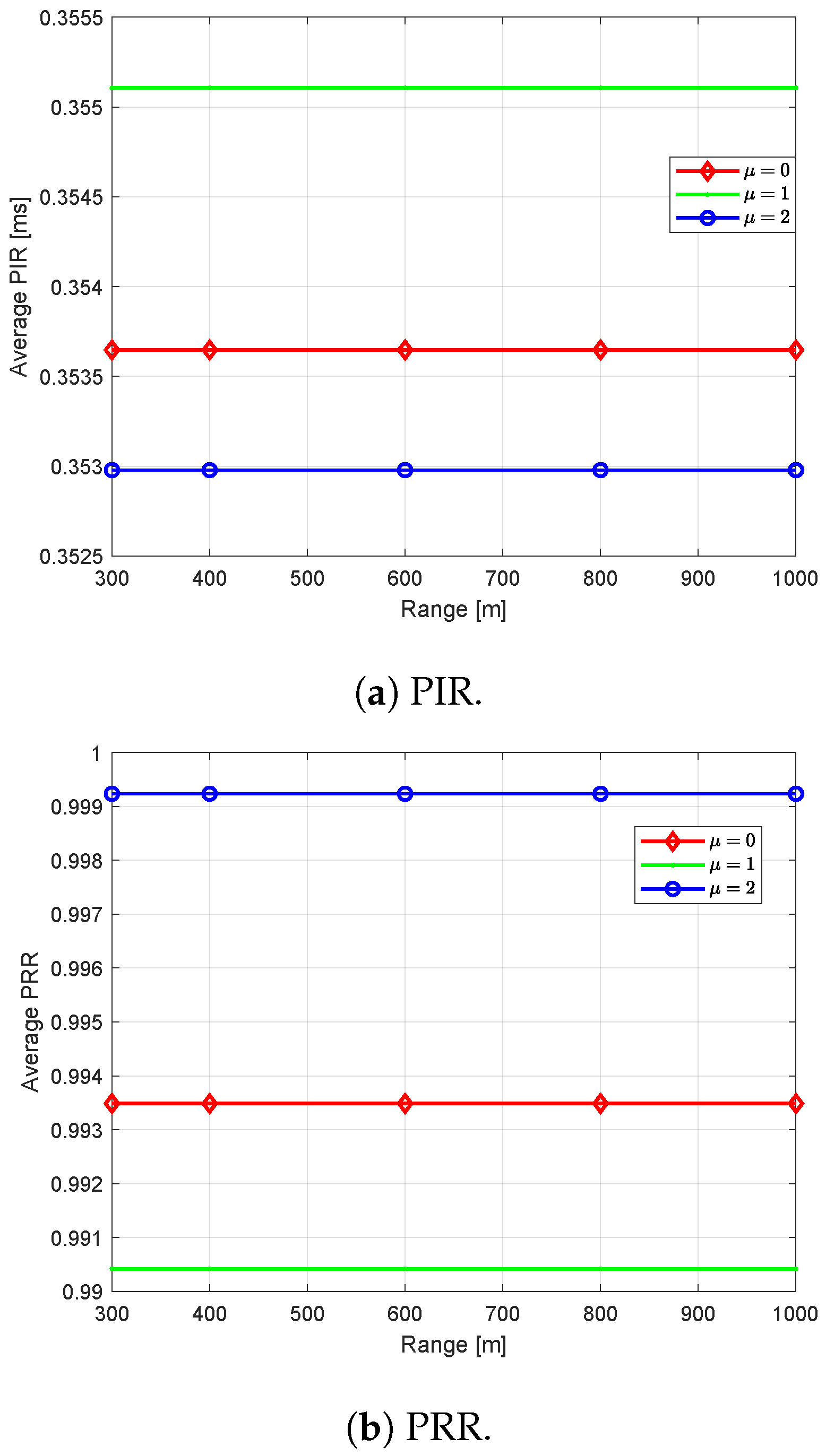
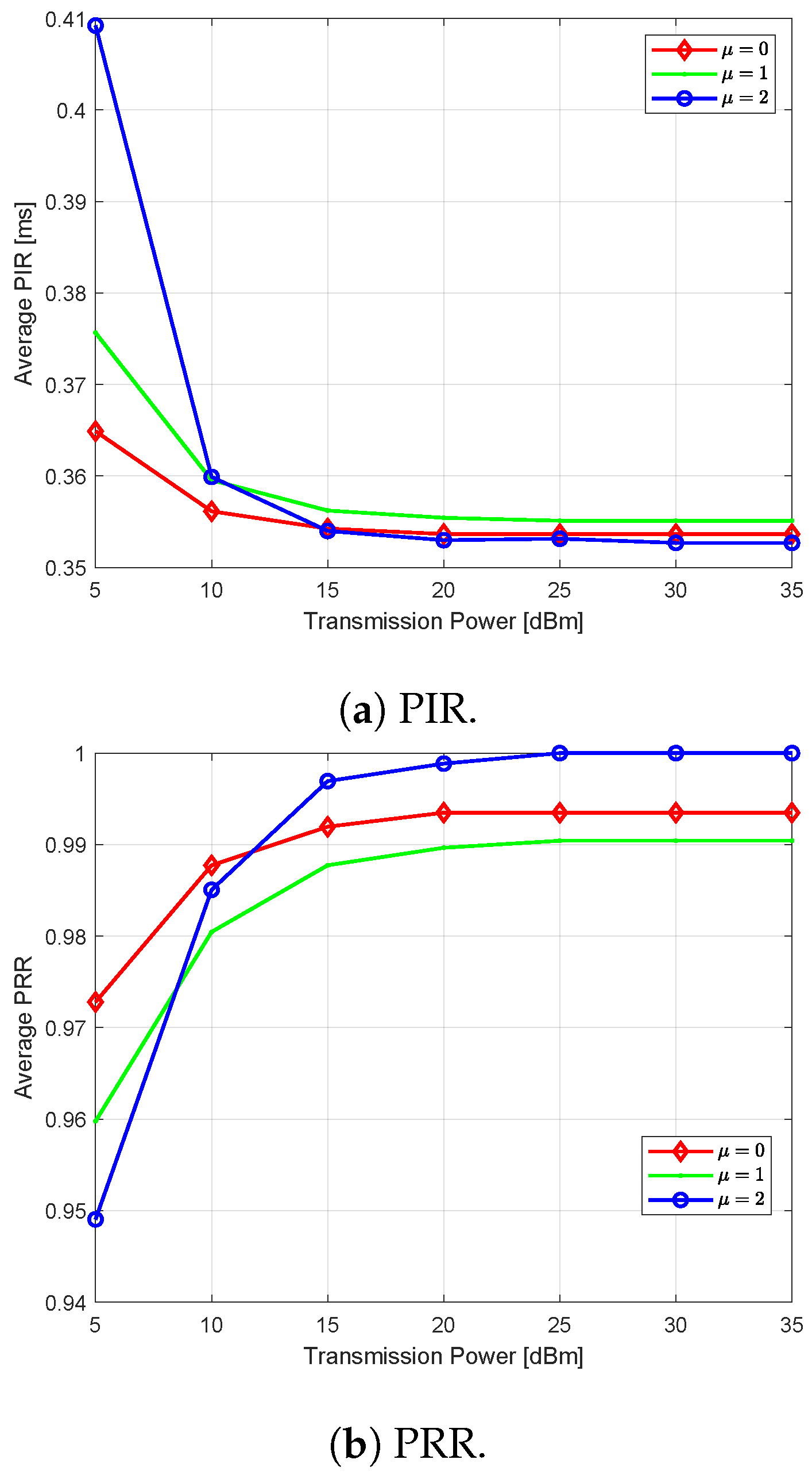
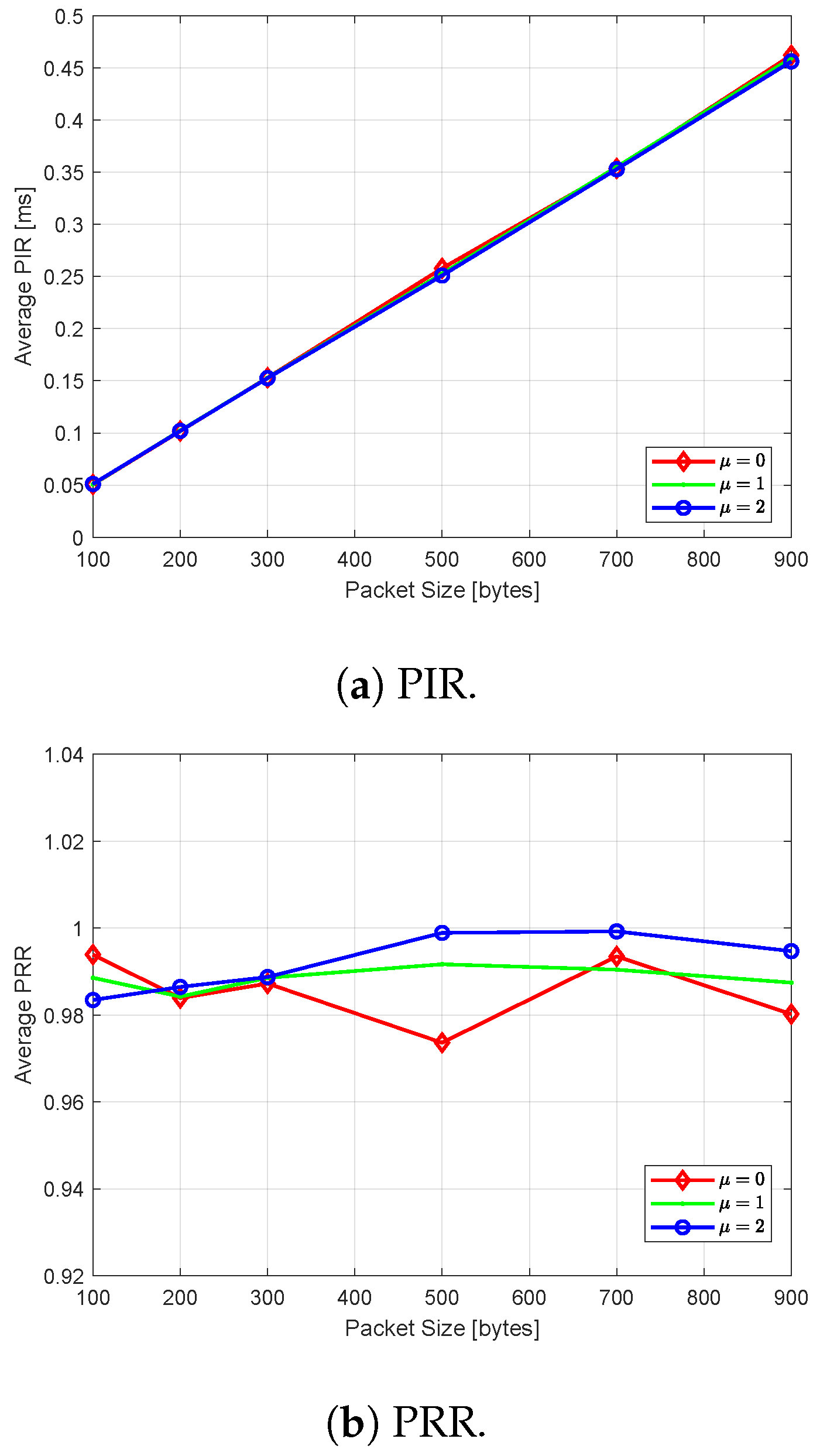
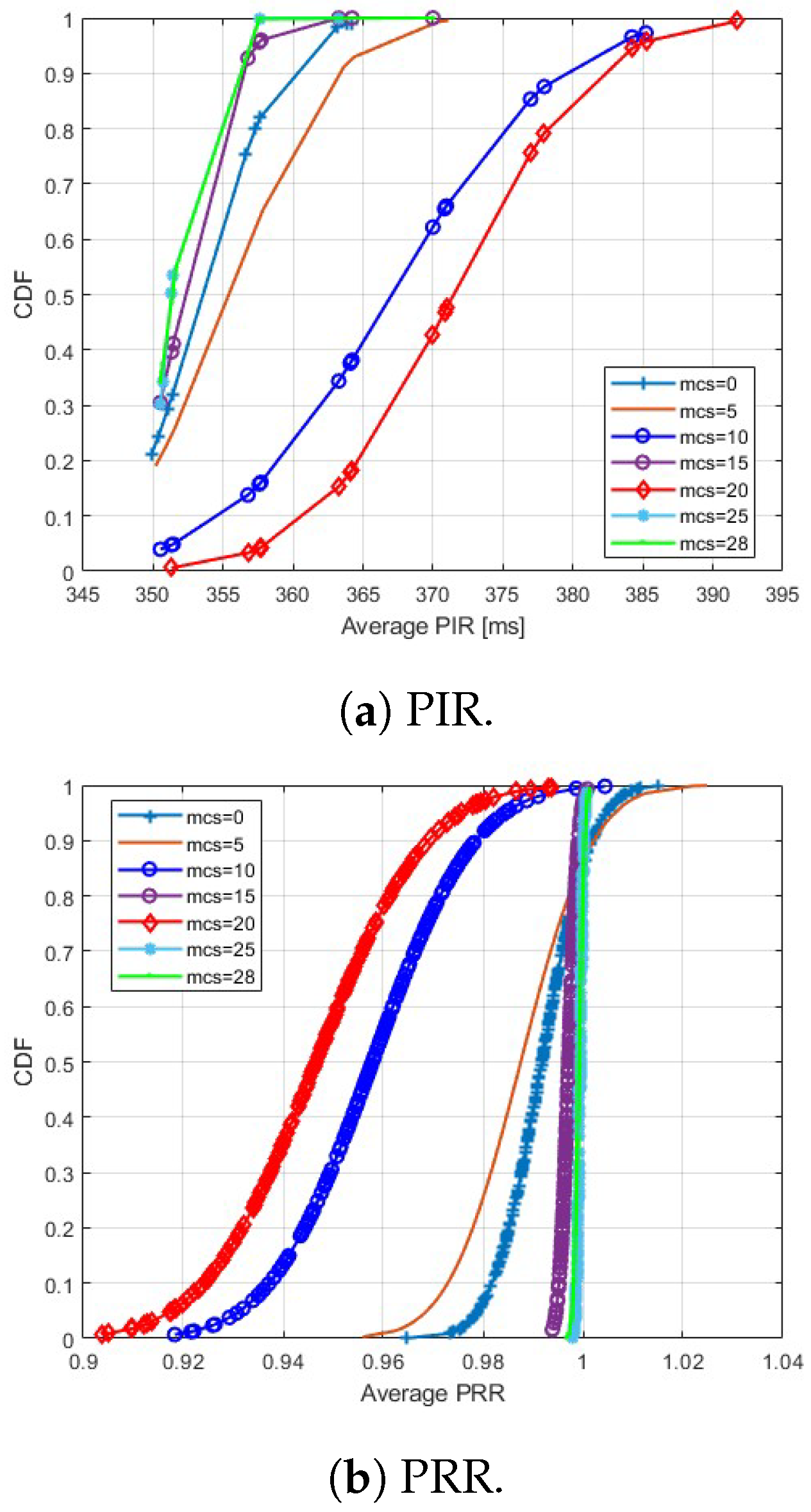
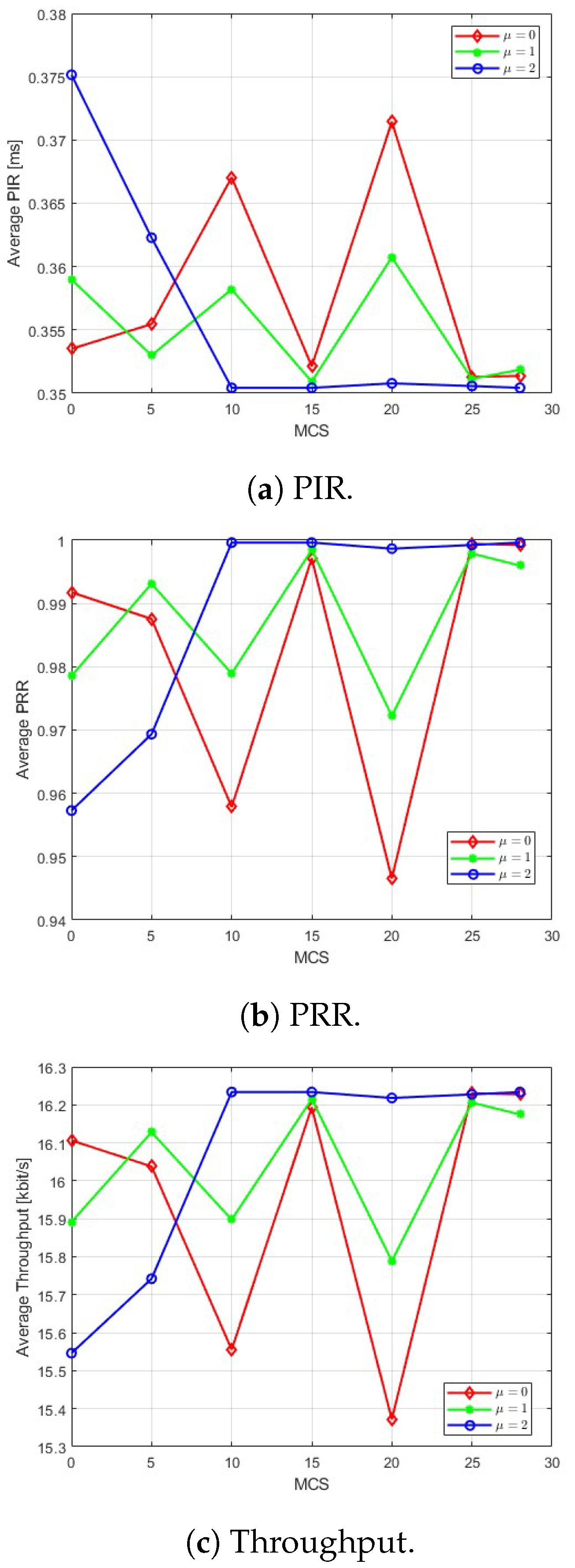
- Packet Reception Ratio (PRR): It is the ratio of the number of neighboring vehicles that received the transmitted packet to the total number of neighboring vehicles of the transmitting vehicle. In a better communication environment, a higher PRR is expected.
- Packet Inter-reception time (PIR): It is the elapsed time between two consecutive receptions of packets for a transmitting (Tx) and receiving (Rx) vehicles pair. We computed the average PIR for a Tx-Rx pair. A lower PIR indicates lower latency and, thus, a better communication environment.
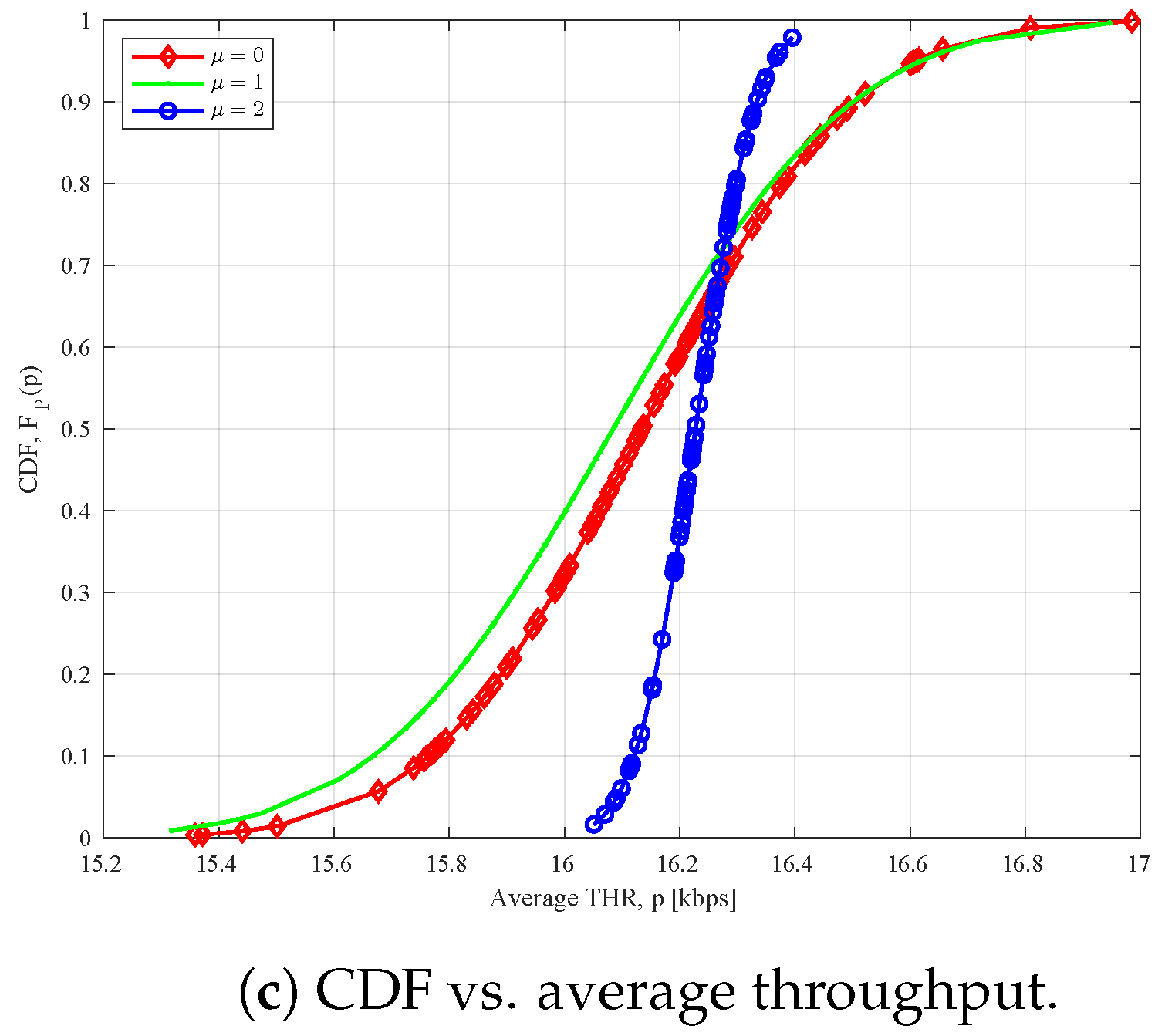
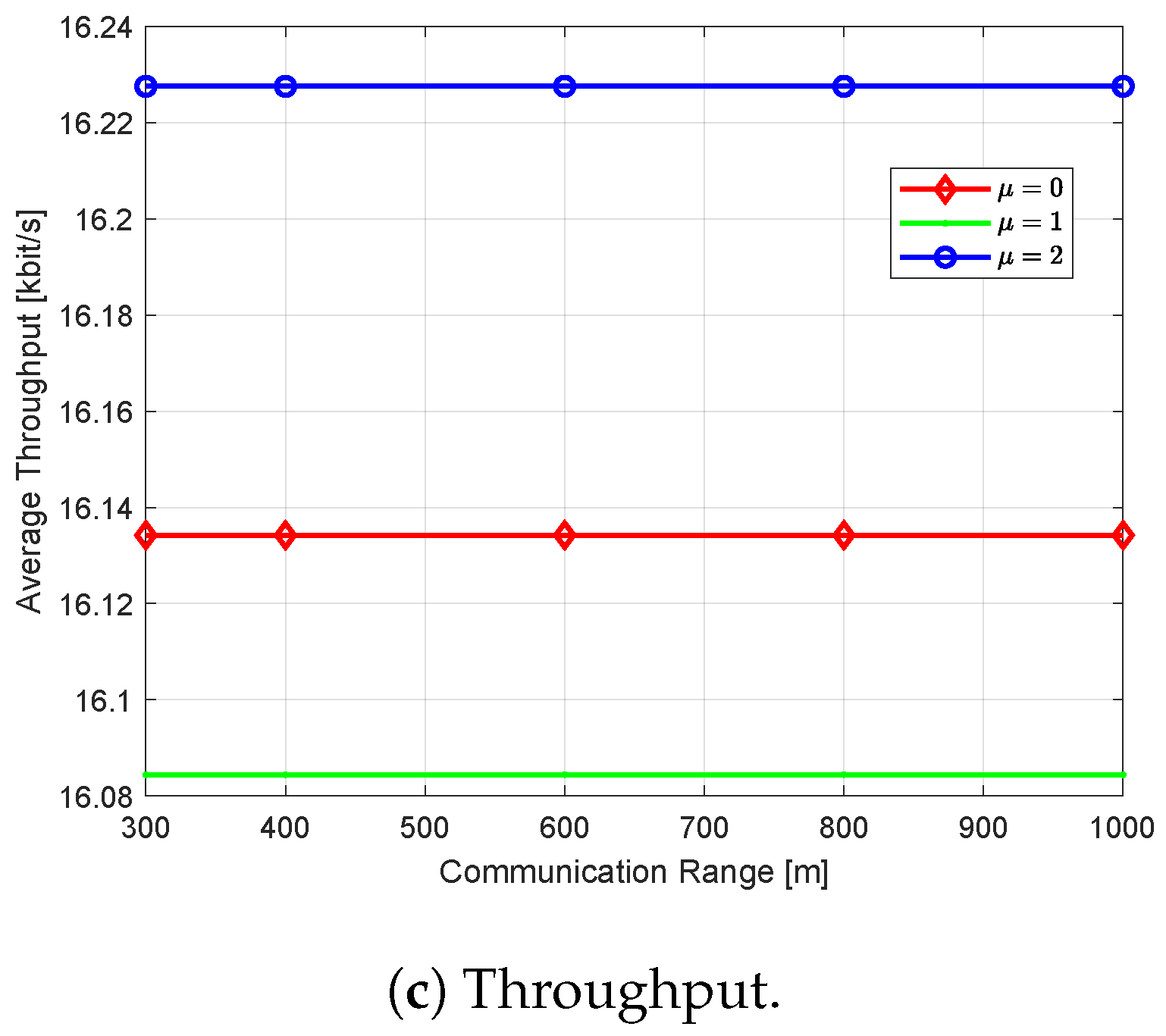
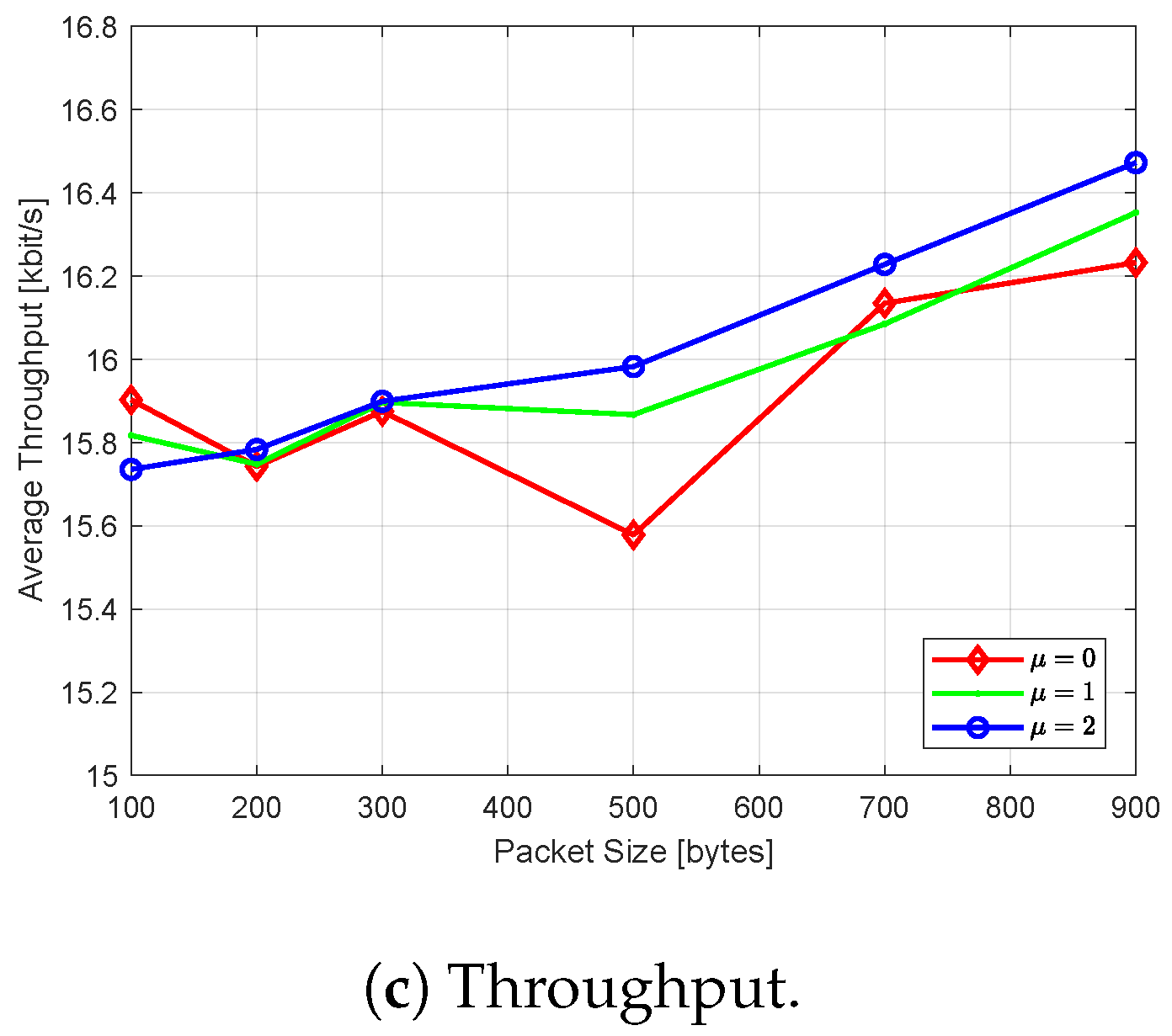
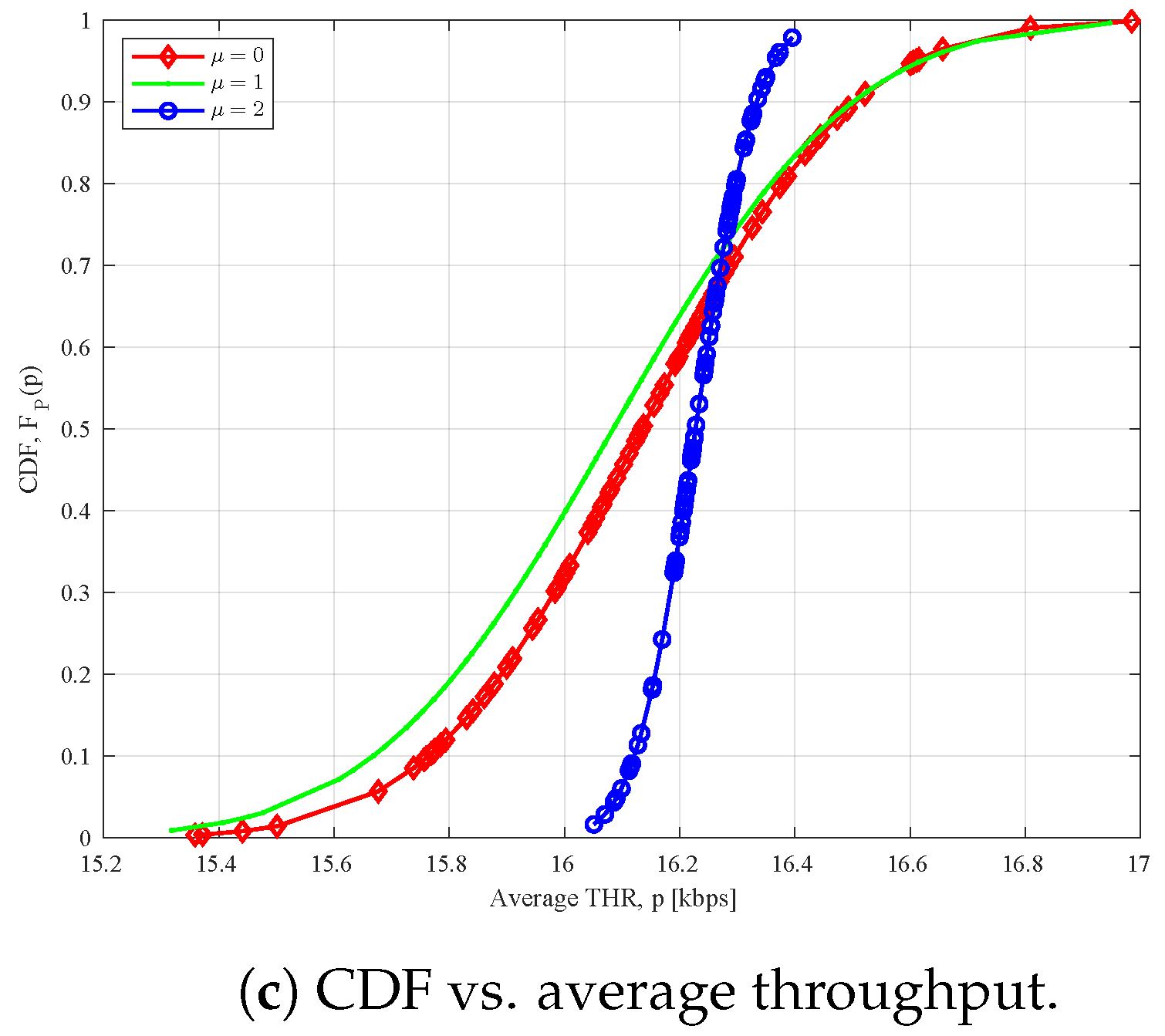
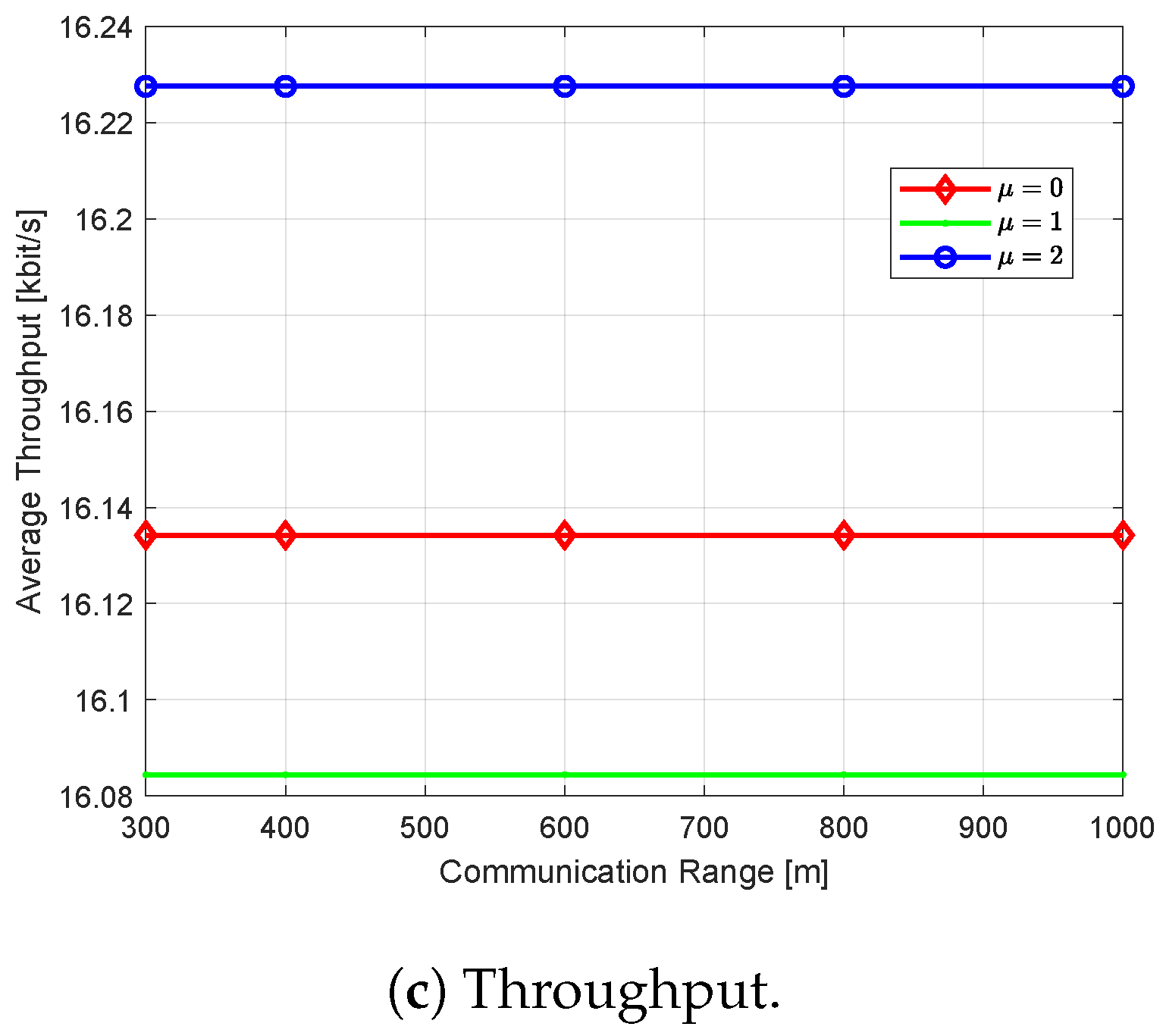
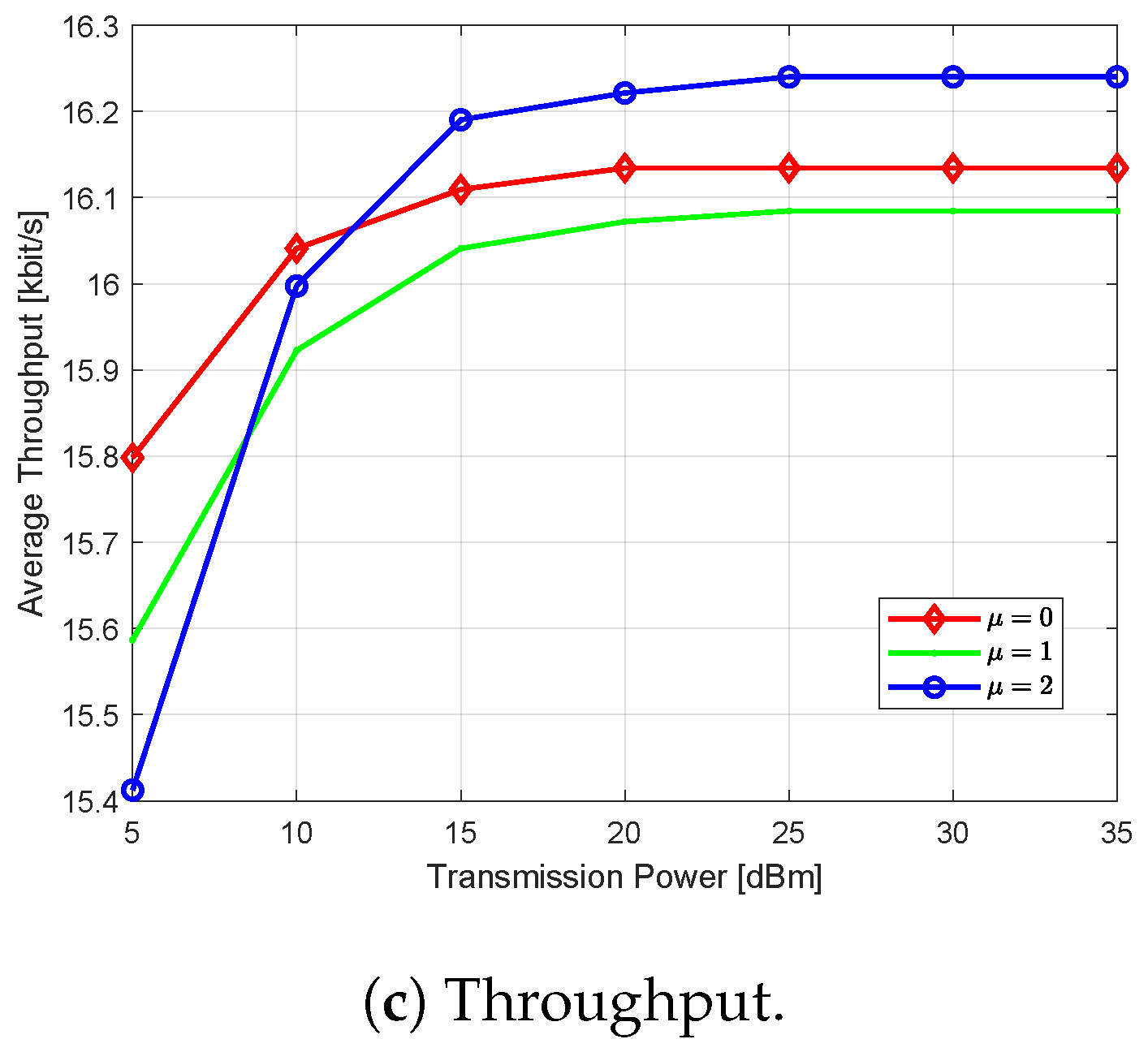
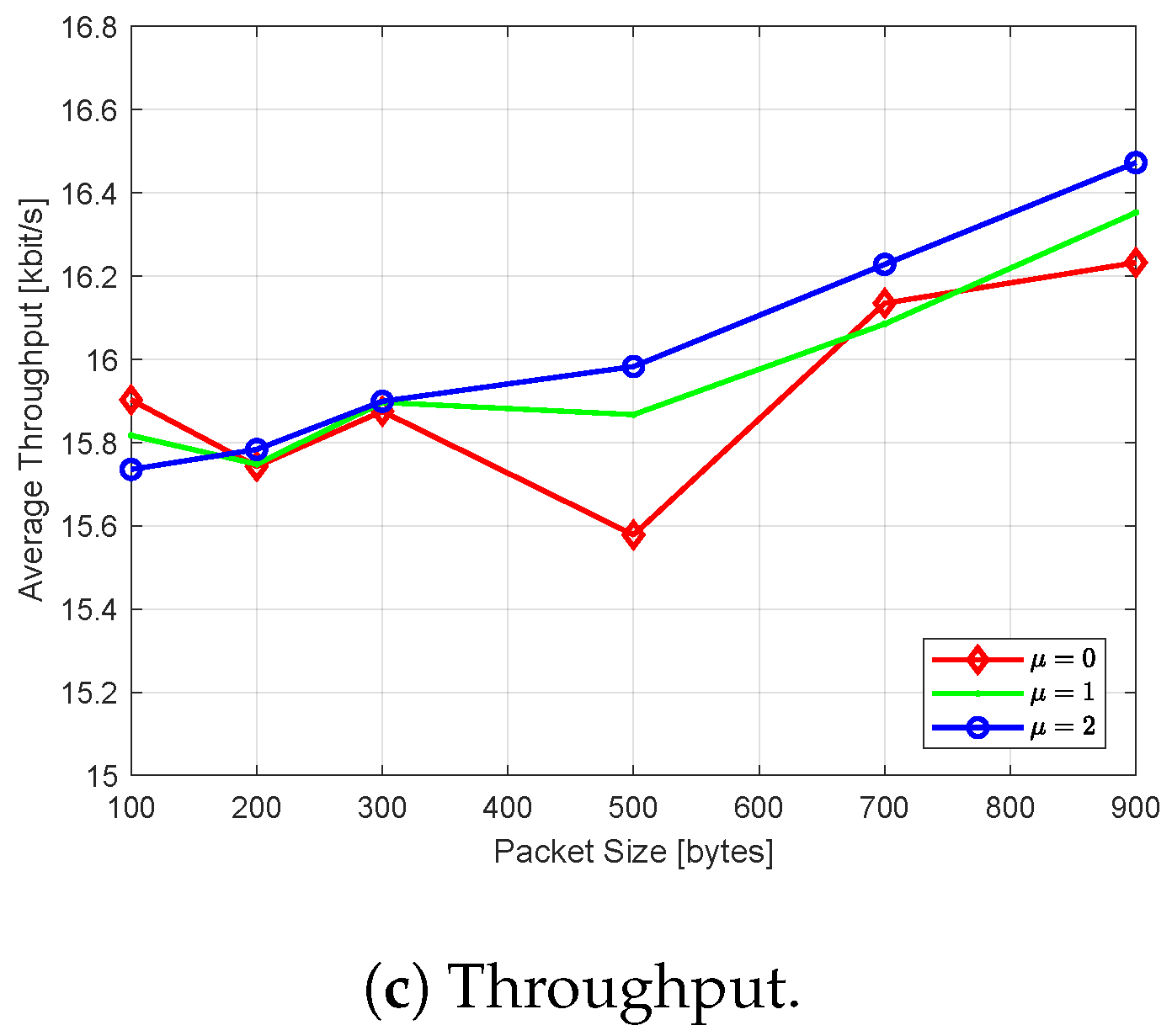
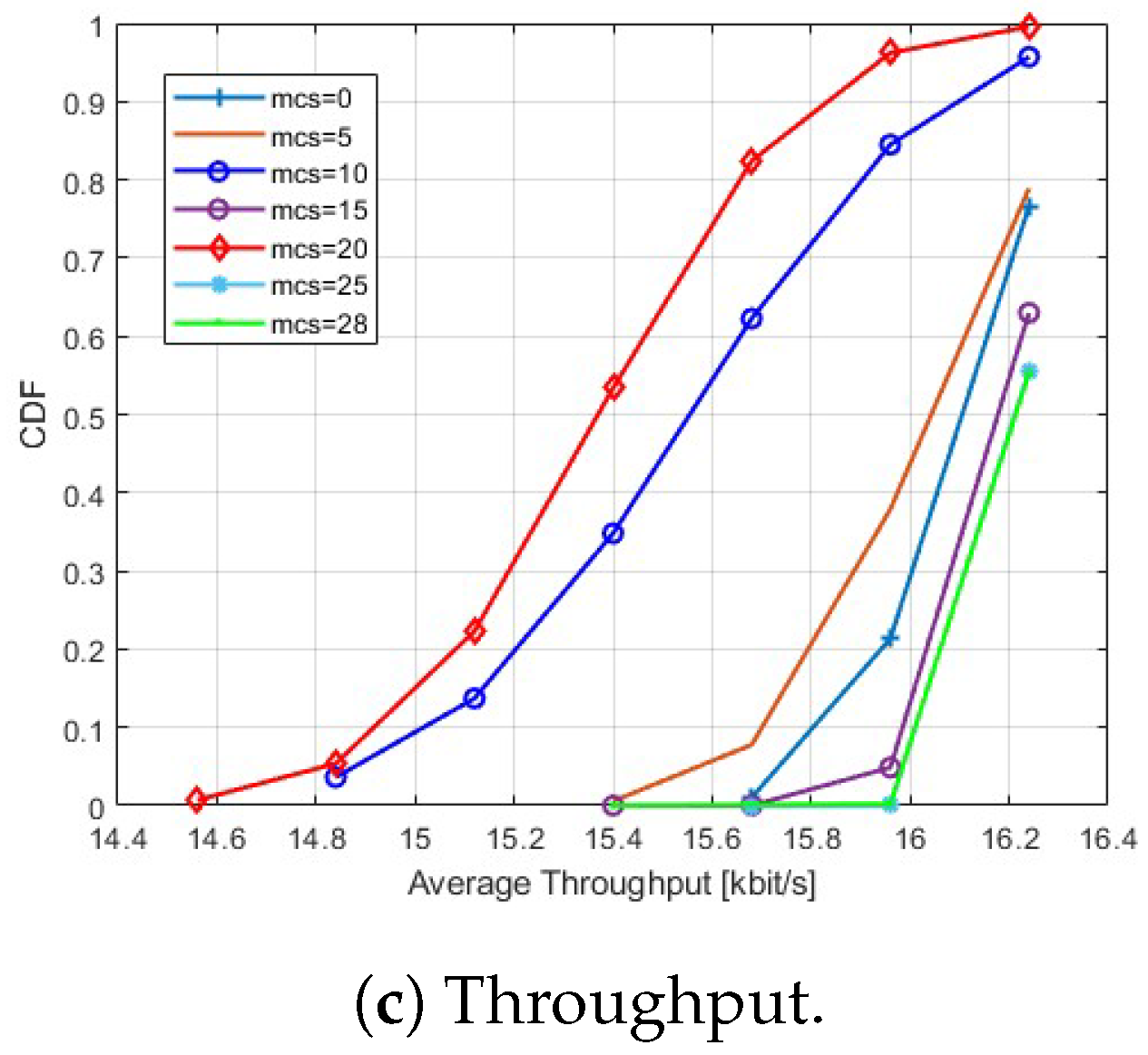
- Throughput: It is defined as the number of bytes received per unit time for a Tx-Rx pair. A higher throughput indicates better communication and is desirable.
5.3. Performance Analysis
5.3.1. Impact of Numerology ()
5.3.2. Impact of Communication Range
5.3.3. Impact of Transmit Power
5.3.4. Impact of Packet Size
5.3.5. Impact of Modulation and Coding Scheme (MCS)
6. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| 3GPP | 3rd Generation Partnership Project |
| C-V2X | Cellular Vehicle-to-everything, also known as (LTE-V2X) |
| LTE-V2X | Long Term Evolution Vehicle-to-everything |
| DSRC | Dedicated Short Range Communication |
| 5G NR | 5th Generation New Radio |
| 5GAA | 5th Generation Automotive Association |
References
- Ali, Z.; Lagén, S.; Giupponi, L.; Rouil, R. 3GPP NR V2X mode 2: Overview, models and system-level evaluation. IEEE Access 2021, 9, 89554–89579. [Google Scholar] [CrossRef] [PubMed]
- FARS Encyclopedia. Available online: http://www-fars.nhtsa.dot.gov/Main/index.aspx (accessed on 22 February 2019).
- Ali, G.G.M.N.; Ayalew, B.; Vahidi, A.; Noor-A-Rahim, M. Feedbackless Relaying for Enhancing Reliability of Connected Vehicles. IEEE Trans. Veh. Technol. 2020, 69, 4621–4634. [Google Scholar] [CrossRef]
- Noor-A-Rahim, M.; Ali, G.G.M.N.; Nguyen, H.; Guan, Y.L. Performance Analysis of IEEE 802.11p Safety Message Broadcast With and without Relaying at Road Intersection. IEEE Access 2018, 6, 23786–23799. [Google Scholar] [CrossRef]
- Zhang, F.; Du, Y.; Liu, W.; Li, P. Model Predictive Power Control for Cooperative Vehicle Safety Systems. IEEE Access 2018, 6, 4797–4810. [Google Scholar] [CrossRef]
- Noor-A-Rahim, M.; Ali, G.G.M.N.; Guan, Y.L.; Ayalew, B.; Chong, P.H.J.; Pesch, D. Broadcast Performance Analysis and Improvements of the LTE-V2V Autonomous Mode at Road Intersection. IEEE Trans. Veh. Technol. 2019, 68, 9359–9369. [Google Scholar] [CrossRef]
- Kenney, J. Dedicated Short-Range Communications (DSRC) Standards in the United States. Proc. IEEE 2011, 99, 1162–1182. [Google Scholar] [CrossRef]
- Naik, G.; Choudhury, B.; Park, J.M. IEEE 802.11 bd & 5G NR V2X: Evolution of radio access technologies for V2X communications. IEEE Access 2019, 7, 70169–70184. [Google Scholar] [CrossRef]
- Wang, M.; Winbjork, M.; Zhang, Z.; Blasco, R.; Do, H.; Sorrentino, S.; Belleschi, M.; Zang, Y. Comparison of LTE and DSRC-Based Connectivity for Intelligent Transportation Systems. In Proceedings of the 2017 IEEE 85th Vehicular Technology Conference (VTC Spring), Sydney, Australia, 4–7 June 2017; pp. 1–5. [Google Scholar] [CrossRef]
- 5GAA Joins 3GPP. Available online: https://www.3gpp.org/ (accessed on 8 March 2023).
- 3GPP Release 14. Available online: https://www.3gpp.org/release-14 (accessed on 8 March 2023).
- 5GAA. An Assessment of LTE-V2X (PC5) and 802.11p Direct Communications Technologies for Improved Road Safety in the EU; 5GAA: Munich, Germany, 2017. [Google Scholar]
- Molina-Masegosa, R.; Gozalvez, J. LTE-V for Sidelink 5G V2X Vehicular Communications: A New 5G Technology for Short-Range Vehicle-to-Everything Communications. IEEE Veh. Technol. Mag. 2017, 12, 30–39. [Google Scholar] [CrossRef]
- 3GPP. Study on NR Vehicular to Everything (V2X) (Release 16); Technical Report 38.885; 3GPP: Edinburgh, UK, 2019. [Google Scholar]
- Harounabadi, M.; Soleymani, D.M.; Bhadauria, S.; Leyh, M.; Roth-Mandutz, E. V2X in 3GPP Standardization: NR Sidelink in Release-16 and Beyond. IEEE Commun. Stand. Mag. 2021, 5, 12–21. [Google Scholar] [CrossRef]
- Ganesan, K.; Lohr, J.; Mallick, P.B.; Kunz, A.; Kuchibhotla, R. NR Sidelink Design Overview for Advanced V2X Service. IEEE Internet Things Mag. 2020, 3, 26–30. [Google Scholar] [CrossRef]
- Lien, S.Y.; Deng, D.J.; Lin, C.C.; Tsai, H.L.; Chen, T.; Guo, C.; Cheng, S.M. 3GPP NR Sidelink Transmissions Toward 5G V2X. IEEE Access 2020, 8, 35368–35382. [Google Scholar] [CrossRef]
- Carpenter, S.E.; Sichitiu, M.L. An Obstacle Model Implementation for Evaluating Radio Shadowing with ns-3. In Proceedings of the 2015 Workshop on Ns-3, New York, NY, USA, 13–14 May 2015; pp. 17–24. [Google Scholar] [CrossRef]
- Ali, G.G.M.N.; Noor-A-Rahim, M.; Chong, P.H.J.; Guan, Y.L. Analysis and Improvement of Reliability Through Coding for Safety Message Broadcasting in Urban Vehicular Networks. IEEE Trans. Veh. Technol. 2018, 67, 6774–6787. [Google Scholar] [CrossRef]
- Simulation of Urban MObility (SUMO). Available online: http://sumo.dlr.de/ (accessed on 23 November 2023).
- Ali, G.G.M.N.; Sharief, S.A.; Sadat, M.N.; Miah, M.S. Performance Analysis of 5G New Radio V2X Communication. In Proceedings of the 2023 IEEE Wireless and Microwave Technology Conference (WAMICON), Melbourne, FL, USA, 17–18 April 2023; pp. 1–4. [Google Scholar] [CrossRef]
- Drago, M.; Zugno, T.; Polese, M.; Giordani, M.; Zorzi, M. MilliCar: An Ns-3 Module for MmWave NR V2X Networks. In Proceedings of the 2020 Workshop on Ns-3, New York, NY, USA, 17–18 June 2020; pp. 9–16. [Google Scholar] [CrossRef]
- ns-3: A Discrete-Event Network Simulator. Available online: https://www.nsnam.org/ (accessed on 23 November 2023).
- Abboud, K.; Omar, H.A.; Zhuang, W. Interworking of DSRC and Cellular Network Technologies for V2X Communications: A Survey. IEEE Trans. Veh. Technol. 2016, 65, 9457–9470. [Google Scholar] [CrossRef]
- Choi, J.; Marojevic, V.; Dietrich, C.B.; Reed, J.H.; Ahn, S. Survey of Spectrum Regulation for Intelligent Transportation Systems. IEEE Access 2020, 8, 140145–140160. [Google Scholar] [CrossRef]
- Ansari, K. Joint use of DSRC and C-V2X for V2X communications in the 5.9 GHz ITS band. IET Intell. Transp. Syst. 2021, 15, 213–224. [Google Scholar] [CrossRef]
- Bai, F.; Stancil, D.D.; Krishnan, H. Toward understanding characteristics of dedicated short-range communications (DSRC) from a perspective of vehicular network engineers. In Proceedings of the Sixteenth Annual International Conference on Mobile Computing and Networking, Chicago, IL, USA, 20–24 September 2010; pp. 329–340. [Google Scholar]
- Wang, J.; Wu, T.; Liu, Y.; Deng, W.; Oh, H. Modeling and performance analysis of dynamic spectrum sharing between DSRC and Wi-Fi systems. Wirel. Commun. Mob. Comput. 2016, 16, 2743–2758. [Google Scholar] [CrossRef]
- Barneto, C.B.; Riihonen, T.; Turunen, M.; Anttila, L.; Fleischer, M.; Stadius, K.; Ryynänen, J.; Valkama, M. Full-duplex OFDM radar with LTE and 5G NR waveforms: Challenges, solutions, and measurements. IEEE Trans. Microw. Theory Tech. 2019, 67, 4042–4054. [Google Scholar] [CrossRef]
- Torgunakov, V.; Loginov, V.; Khorov, E. A study of channel bonding in IEEE 802.11 bd networks. IEEE Access 2022, 10, 25514–25533. [Google Scholar] [CrossRef]
- Abd, R.I.; Kim, K.S. Protocol solutions for IEEE 802.11 bd by enhancing IEEE 802.11 ad to address common technical challenges associated with mmWave-based V2X. IEEE Access 2022, 10, 100646–100664. [Google Scholar] [CrossRef]
- Zhuofei, W.; Bartoletti, S.; Martinez, V.; Bazzi, A. Adaptive Repetition Strategies in IEEE 802.11 bd V2X Networks. IEEE Trans. Veh. Technol. 2023, 72, 8262–8266. [Google Scholar] [CrossRef]
- Zeadally, S.; Javed, M.A.; Hamida, E.B. Vehicular communications for ITS: Standardization and challenges. IEEE Commun. Stand. Mag. 2020, 4, 11–17. [Google Scholar] [CrossRef]
- Hu, J.; Chen, S.; Zhao, L.; Li, Y.; Fang, J.; Li, B.; Shi, Y. Link level performance comparison between LTE V2X and DSRC. J. Commun. Inf. Netw. 2017, 2, 101–112. [Google Scholar] [CrossRef]
- Hafeez, K.A.; Zhao, L.; Ma, B.; Mark, J.W. Performance analysis and enhancement of the DSRC for VANET’s safety applications. IEEE Trans. Veh. Technol. 2013, 62, 3069–3083. [Google Scholar] [CrossRef]
- Nguyen, T.V.; Shailesh, P.; Sudhir, B.; Kapil, G.; Jiang, L.; Wu, Z.; Malladi, D.; Li, J. A comparison of cellular vehicle-to-everything and dedicated short range communication. In Proceedings of the 2017 IEEE Vehicular Networking Conference (VNC), Turin, Italy, 27–29 November 2017; pp. 101–108. [Google Scholar] [CrossRef]
- Zhao, L.; Fang, J.; Hu, J.; Li, Y.; Lin, L.; Shi, Y.; Li, C. The performance comparison of LTE-V2X and IEEE 802.11 p. In Proceedings of the 2018 IEEE 87th Vehicular Technology Conference (VTC Spring), Porto, Portugal, 3–6 June 2018; pp. 1–5. [Google Scholar]
- Molina-Masegosa, R.; Gozalvez, J.; Sepulcre, M. Comparison of IEEE 802.11 p and LTE-V2X: An evaluation with periodic and aperiodic messages of constant and variable size. IEEE Access 2020, 8, 121526–121548. [Google Scholar] [CrossRef]
- Hameed Mir, Z.; Filali, F. C-ITS Applications, Use Cases and Requirements for V2X Communication Systems—Threading through IEEE 802.11 p to 5G. In Towards a Wireless Connected World: Achievements and New Technologies; Springer: Berlin, Germany, 2022; pp. 261–285. [Google Scholar]
- Petrov, T.; Sevcik, L.; Pocta, P.; Dado, M. A Performance Benchmark for Dedicated Short-Range Communications and LTE-Based Cellular-V2X in the Context of Vehicle-to-Infrastructure Communication and Urban Scenarios. Sensors 2021, 21, 95. [Google Scholar] [CrossRef] [PubMed]
- Bazzi, A.; Masini, B.M.; Zanella, A.; Thibault, I. On the Performance of IEEE 802.11p and LTE-V2V for the Cooperative Awareness of Connected Vehicles. IEEE Trans. Veh. Technol. 2017, 66, 10419–10432. [Google Scholar] [CrossRef]
- Cecchini, G.; Bazzi, A.; Masini, B.M.; Zanella, A. Performance comparison between IEEE 802.11 p and LTE-V2V in-coverage and out-of-coverage for cooperative awareness. In Proceedings of the 2017 IEEE Vehicular Networking Conference (VNC), Turin, Italy, 27–29 November 2017; pp. 109–114. [Google Scholar]
- Vukadinovic, V.; Bakowski, K.; Marsch, P.; Garcia, I.D.; Xu, H.; Sybis, M.; Sroka, P.; Wesolowski, K.; Lister, D.; Thibault, I. 3GPP C-V2X and IEEE 802.11 p for Vehicle-to-Vehicle communications in highway platooning scenarios. Ad Hoc Netw. 2018, 74, 17–29. [Google Scholar] [CrossRef]
- Qi, W.; Landfeldt, B.; Song, Q.; Guo, L.; Jamalipour, A. Traffic differentiated clustering routing in DSRC and C-V2X hybrid vehicular networks. IEEE Trans. Veh. Technol. 2020, 69, 7723–7734. [Google Scholar] [CrossRef]
- Mir, Z.H.; Toutouh, J.; Filali, F.; Ko, Y.B. Enabling DSRC and C-V2X integrated hybrid vehicular networks: Architecture and protocol. IEEE Access 2020, 8, 180909–180927. [Google Scholar] [CrossRef]
- Bazzi, A.; Bartoletti, S.; Zanella, A.; Martinez, V. Performance Analysis of IEEE 802.11 p Preamble Insertion in C-V2X Sidelink Signals for Co-Channel Coexistence. arXiv 2022, arXiv:2201.07036. [Google Scholar]
- Tahir, M.N.; Katz, M. Performance evaluation of IEEE 802.11 p, LTE and 5G in connected vehicles for cooperative awareness. Eng. Rep. 2022, 4, e12467. [Google Scholar] [CrossRef]
- 3GPP. Study on Enhancement of 3GPP Support for 5G V2X Services; Technical Report 22.886 V16. 2.0; 3GPP: Edinburgh, UK, 2018. [Google Scholar]
- Garcia, M.H.; Molina-Galan, A.; Boban, M.; Gozalvez, J.; Coll-Perales, B.; Sahin, T.; Kousaridas, A. A Tutorial on 5G NR V2X Communications. IEEE Commun. Surv. Tutorials 2021, 23, 1972–2026. [Google Scholar] [CrossRef]
- Vodafone Group Plc. RP-181480: New SID on NR V2X. 3GPP TDocs at Meeting: RP-80 - 2018-06-11 to 2018-06-14; Vodafone Group Plc: La Jolla, CA, USA, 2018. [Google Scholar]
- TSG RAN; NR; Physical Layer; General Description, Release 15, v16.0.0, Document 3GPP TS 38.201, January 2020. Available online: https://www.etsi.org/deliver/etsi_ts/138200_138299/138201/16.00.00_60/ts_138201v160000p.pdf (accessed on 15 December 2022).
- ns-3 Tutorial. Available online: https://www.nsnam.org/docs/release/3.30/tutorial/singlehtml/index.html (accessed on 15 October 2022).
- Ali, Z.; Lagén, S.; Giupponi, L. On the impact of numerology in NR V2X Mode 2 with sensing and random resource selection. In Proceedings of the 2021 IEEE Vehicular Networking Conference (VNC), Ulm, Germany, 10–12 November 2021; pp. 151–157. [Google Scholar] [CrossRef]
- Yan, J.; Härri, J. MCS Analysis for 5G-NR V2X Sidelink Broadcast Communication. In Proceedings of the 2022 IEEE Intelligent Vehicles Symposium (IV), Aachen, Germany, 4–9 June 2022; pp. 1347–1352. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | DSRC | C-V2X | 5G-NR V2X |
|---|---|---|---|
| Origin/Base | IEEE 802.11p | 4G LTE | 5G LTE |
| Transmission range | Typically |
|
|
| Frequency range |
| Sub frequencies: 2.570–2.620 and 5.855–5.925 and mmWave frequencies: 24.25–52.6 | |
| MCS | BPSK, QPSK, 16-QAM, 64-QAM |
| QPSK, 16-QAM, 64-QAM, 256-QAM |
| Re-transmission |
| Blind |
|
| Usermultiplexing | Single user per symbol | Multiple users supported | Multiple users supported |
| Symbolduration | 8 | 71 | 66.7 ( = 0), 33.3 ( = 1), 16.7 ( = 2) |
| Concurrent transmission | Optional | Yes | Yes |
| Sub-carrier spacing |
| 15 |
|
| Modulation | OFDM | FDM (control and data multiplexing) SC-FDMA (waveform) | TDM (control and data multiplexing) OFDM (waveform) |
| Parameter | Value | Default |
|---|---|---|
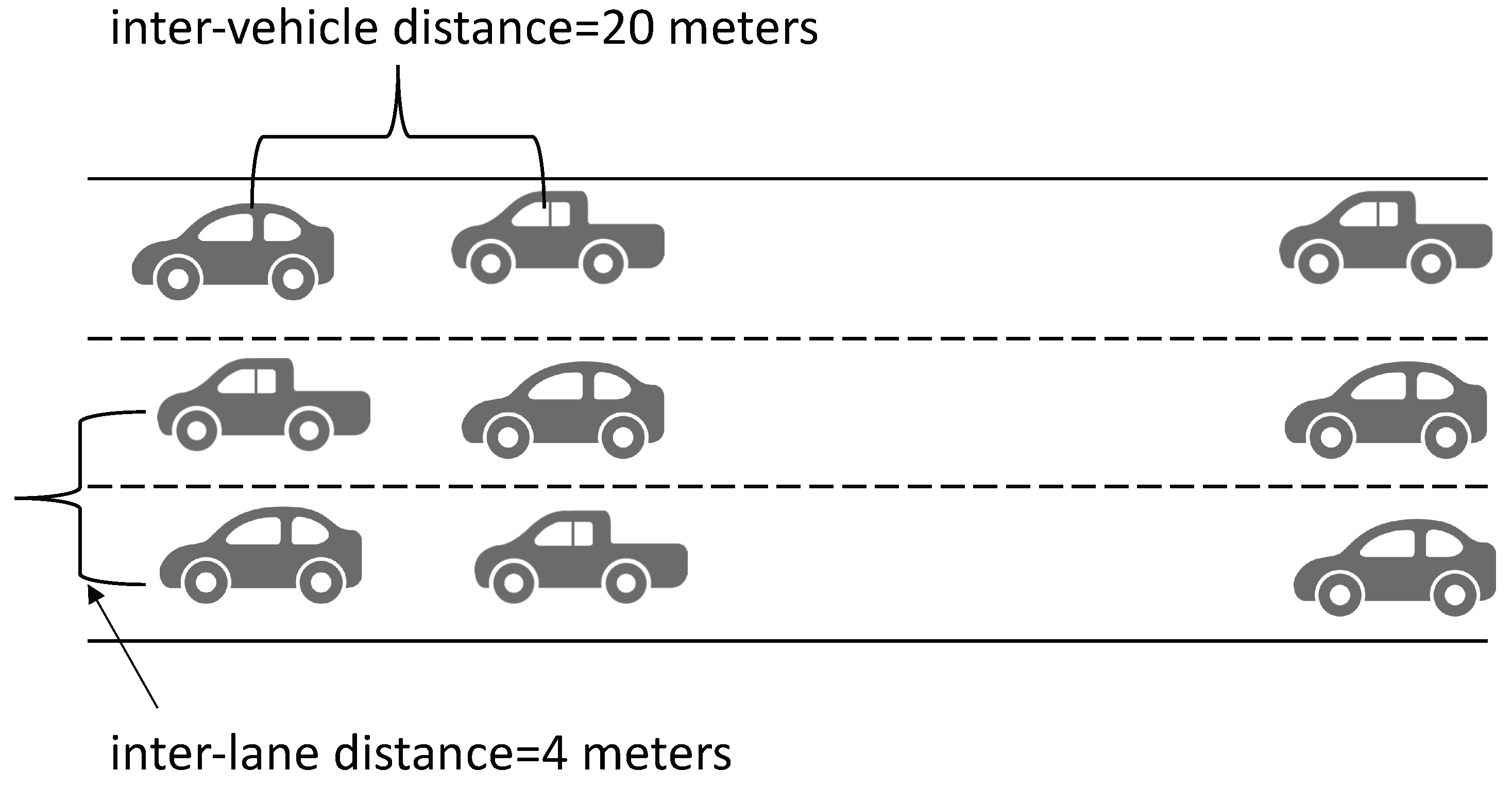
| Number of vehicles per lane | 11 | |
| Number of lanes | 3 | |
| Inter-vehicle distance | 20 m | |
| Freeway max. vehicle speed | 38.89 m/s | |
| Broadcast message size | 100∼1500 bytes | 700 bytes |
| Transmission rate | 10 Hz | |
| Carrier frequency | 5.89 GHz | |
| Channel bandwidth | 10 MHz | |
| Numerology () | = 0∼2 | |
| MCS | 0∼28 | 14 |
| Transmit power | 5∼35 dBm | 23 dBm |
| Communication range | 100∼1000 m | 600 m |
| Mobility model | Constant velocity mobility | |
| Simulation time | 20 s sim time |
| Parameter | |||
|---|---|---|---|
| [KB] | [KB] | [KB] | |
| [KB] | [KB] | [KB] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ali, G.G.M.N.; Sadat, M.N.; Miah, M.S.; Sharief, S.A.; Wang, Y. A Comprehensive Study and Analysis of the Third Generation Partnership Project’s 5G New Radio for Vehicle-to-Everything Communication. Future Internet 2024, 16, 21. https://doi.org/10.3390/fi16010021
Ali GGMN, Sadat MN, Miah MS, Sharief SA, Wang Y. A Comprehensive Study and Analysis of the Third Generation Partnership Project’s 5G New Radio for Vehicle-to-Everything Communication. Future Internet. 2024; 16(1):21. https://doi.org/10.3390/fi16010021
Chicago/Turabian StyleAli, G. G. Md. Nawaz, Mohammad Nazmus Sadat, Md Suruz Miah, Sameer Ahmed Sharief, and Yun Wang. 2024. "A Comprehensive Study and Analysis of the Third Generation Partnership Project’s 5G New Radio for Vehicle-to-Everything Communication" Future Internet 16, no. 1: 21. https://doi.org/10.3390/fi16010021
APA StyleAli, G. G. M. N., Sadat, M. N., Miah, M. S., Sharief, S. A., & Wang, Y. (2024). A Comprehensive Study and Analysis of the Third Generation Partnership Project’s 5G New Radio for Vehicle-to-Everything Communication. Future Internet, 16(1), 21. https://doi.org/10.3390/fi16010021