
Internet of Robotic Things (IoRT) and Metaheuristic Optimization Techniques Applied for Wheel-Legged Robot



Abstract
1. Introduction
2. State-of-the-Art and Related Work
3. Description of the Control System

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device | Raspberry Pi Pico | STM32F103R | ESP32 |
|---|---|---|---|
| Power consumption | <1 W | <1 W | 5 W |
| Core | Raspberry RP2040 ARM Cortex M0+ | ARM Cortex M | Dual-Core Tensilica LX6 |
| Clock rate | 133 MHz | 72 MHz | 240 MHz |
| User memory size | 2 MB | 64 kB | 4 MB |
| RAM | 264 kB | 20 kB | 520 kB |
4. Geometrical Synthesis with Flower Pollination Algorithm
- Drives should be installed on the platform directly (to reduce mass of the elements attached to the structure).
- The mechanism should allow to follow the desired trajectory with a single drive only.
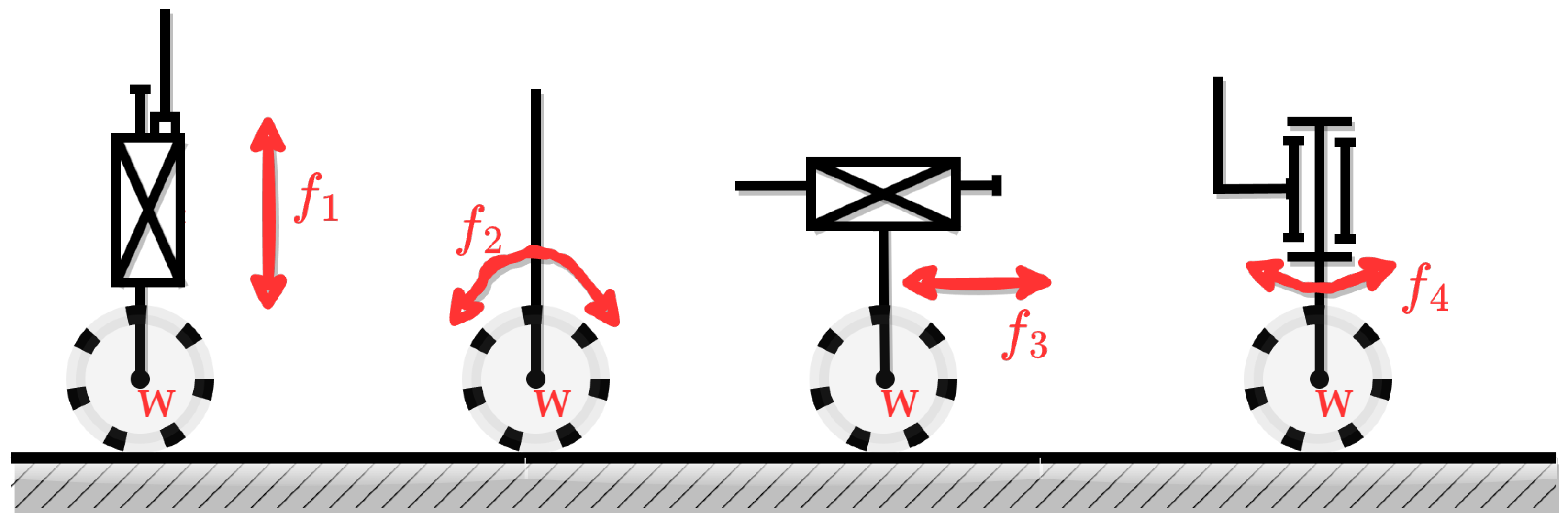
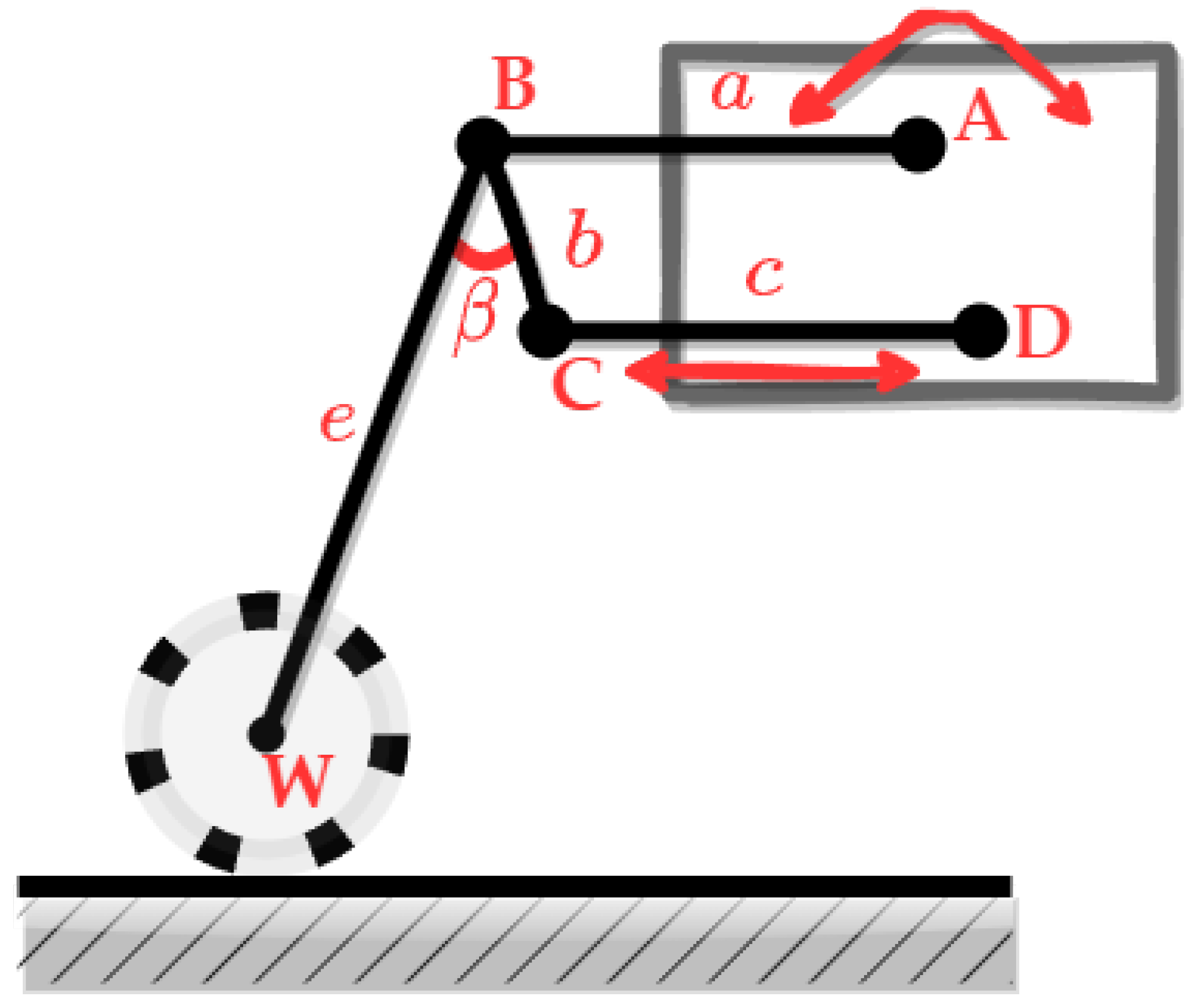
- The total number of freedom degrees of a single mechanism equals 4 (Figure 5). For synthesis purposes, this can be reduced to 3 as the driving motor introduces the independently to the suspension mechanism. It can also be noted that turning can be obtained with a simple gear attached at a fixing point of the BLDC motor. Taking these assumptions into consideration, only two degrees of freedom have to be reproduced with a suspension kinematic chain.
- Both translational and rotational joints can be used.

- A linear trajectory, perpendicular to ground level;
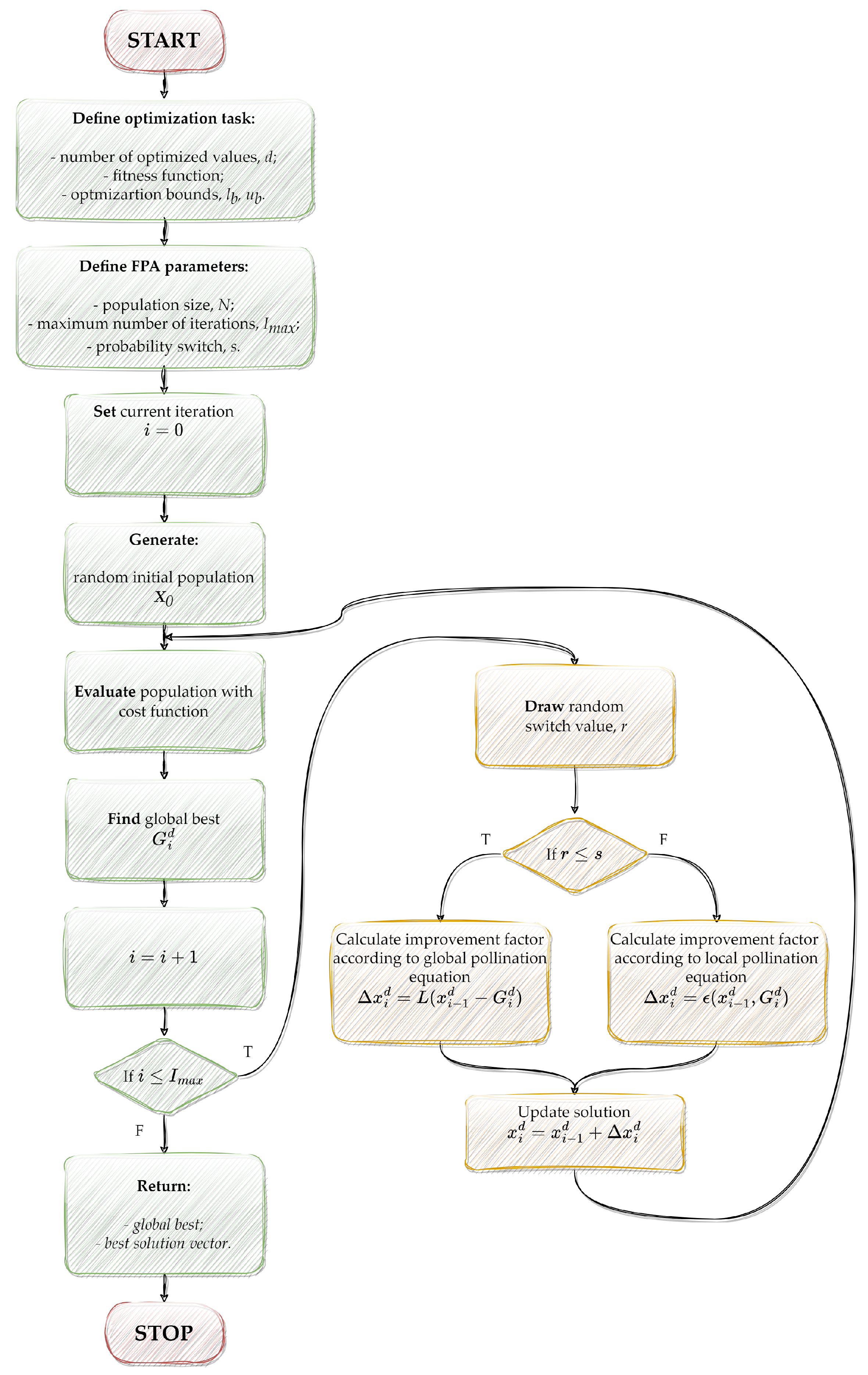
- Movement along the desired trajectory proportional to the controlled angle (in joint A).The above issue is related to the geometrical synthesis task. Different approaches may be used to solve the problem. In the presented work, the flower pollination algorithm (FPA) was used to find the optimal configuration of the kinematic chain lengths. The method was firstly described by Xin She-Yang [47]. It was inspired with observations of pollination phenomena. Two ways of pollination can be taken into consideration with the presence of a single or more species. The self-pollination or geitonogamy process describes the situation in which pollen of a single specimen is moved between its flowers. Such a process is considered as local, where the distance between two flowers of the same plant is marginal. A unique case, called autogamy, is even more local and is where pollen is moved between the anther and the stigma of an individual flower. The method observed in nature requires external pollinators such as insects or birds. The pollen of a single plant adheres to legs, antennae, feathers, etc. Then, it is transported to stigmas of different species. This process is called cross-pollination or allogamy, and is considered as global (pollen affixed to birds can travel hundreds of kilometers before reaching the goal) [48,49]. The FPA is a swarm-based meta-heuristic optimization algorithm [50,51]. Thus, in subsequent iterations, the specimens of the next populations evolve [52,53]. The main purpose of every plant is to donate its best genes to successors. The weakest individuals become extinct and are replaced with stronger entities. In the case of optimization algorithms, the strength is measured with a fitness function defined to a task. For the algorithm purposes, two previously analyzed pollination mechanisms are represented using equations describing the update of solutions assigned to a single specimen. The specimen in the self-pollination process is described by Formula (3) below:where: —n-th specimen value in the current and the previous iteration; —random value , , and —randomly chosen solutions from the previous iteration.
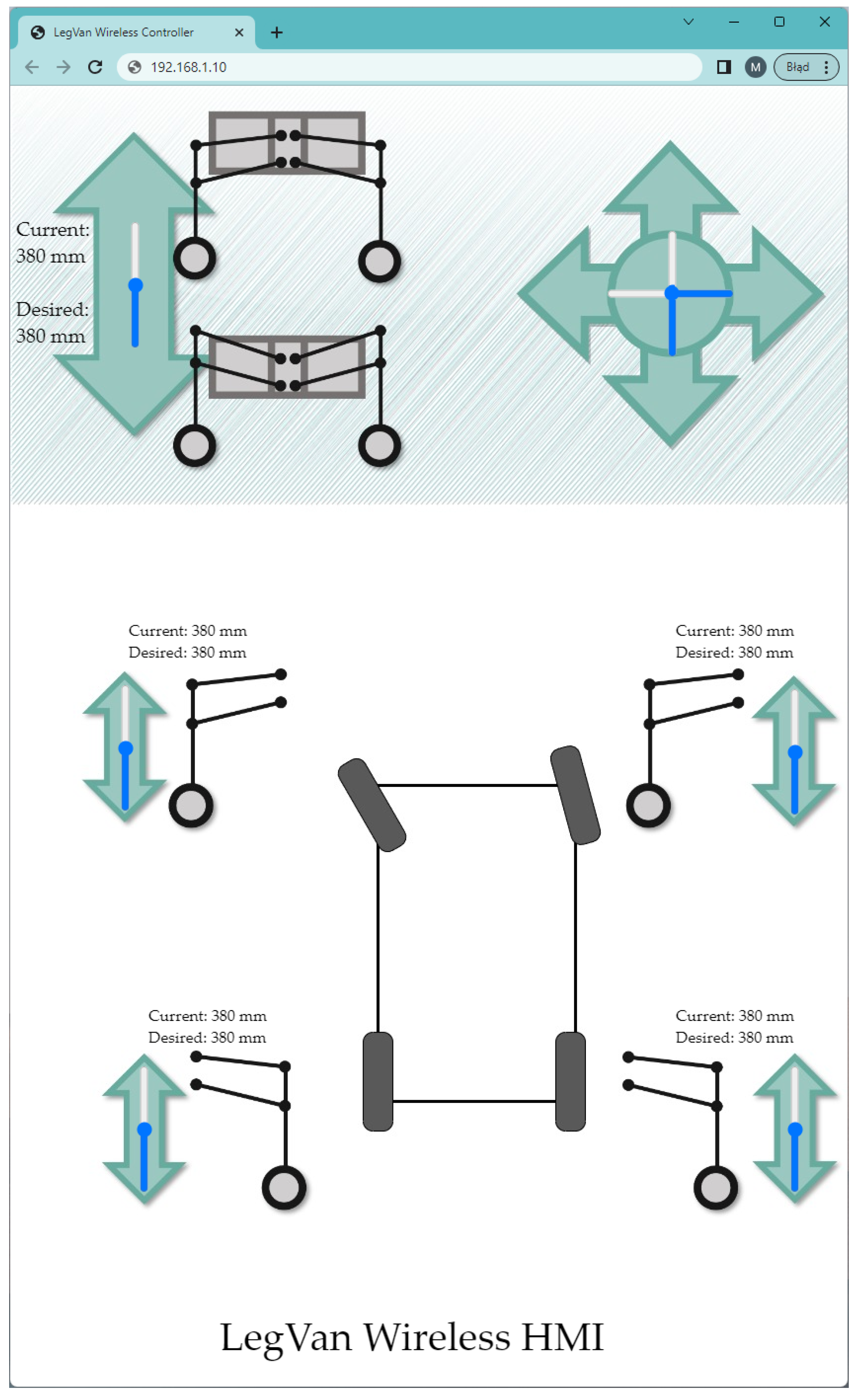
5. Wireless Controller
6. Final Remarks
- In the presented robot control interface, the leveling system does not work autonomously, so the adjustment of each leg height should be realized continuously.
- The integration of the ESP32 controller with the HMI website is an efficient and low-cost solution for robotic systems.
- The integration of the control website with a modern microcontroller unit allows operation of the robot using a touch screen.
- The use of ESP32 allows a mobile robotic platform to be controlled with a smartphone.
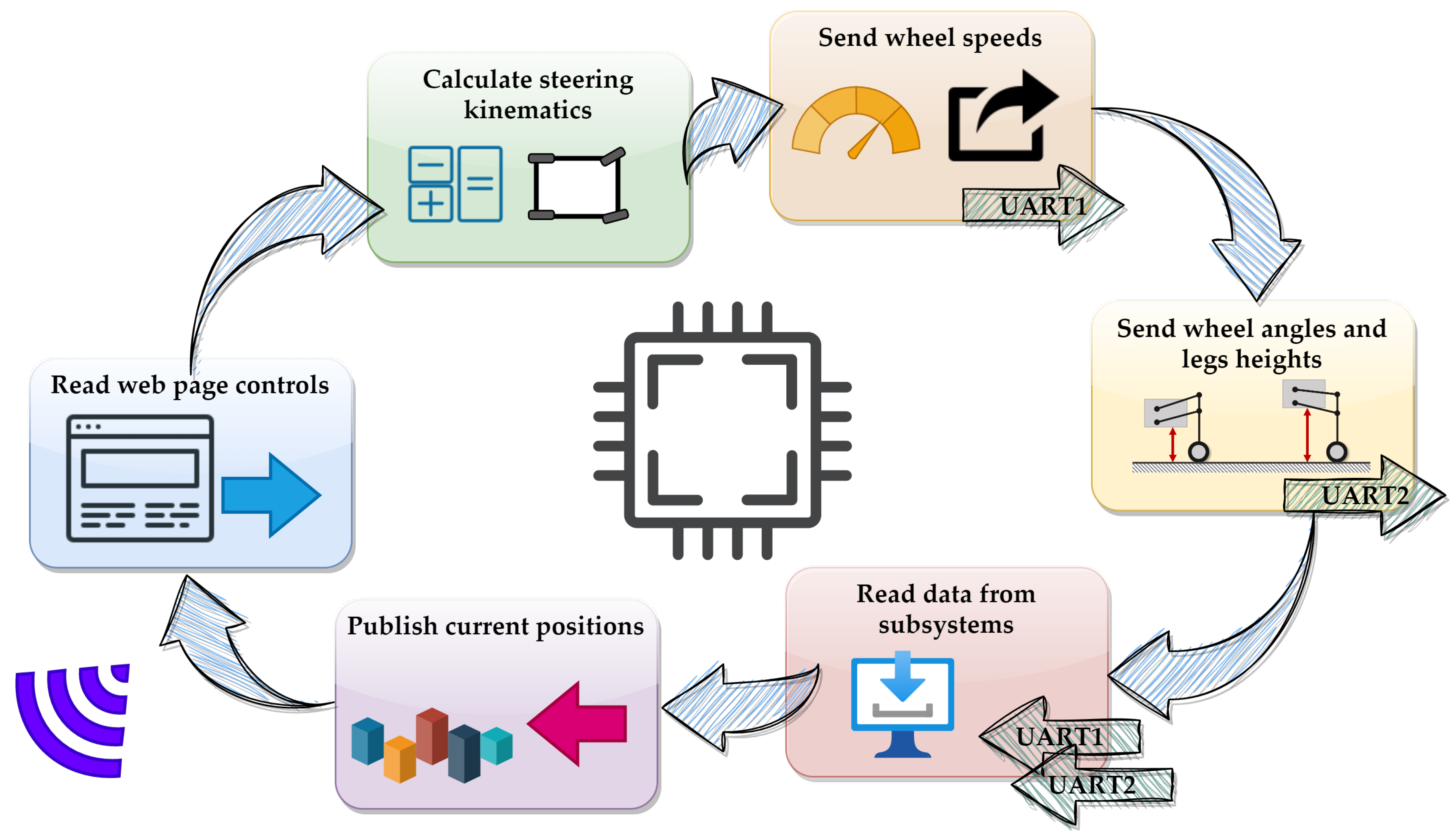
- The use of a synchronous state machine implemented in the main controller is mandatory in order to synchronize all tasks in specific time windows.
- The ESP32 is a modern and efficient tool that gives the possibility of synchronising basic control procedures with wireless communication and power demanding calculation of control kinematics.
- The FPA is a reasonable tool in the tuning process of the PI speed controller in the FOC structure, which ensures a high-precision speed control loop.
- The UART protocol is a sufficient and user-friendly tool to be widely used in modern robotic platforms.
- Raspberry Pi Pico is a low-cost entry level microcontroller unit, which ensures the possibility to realize advanced control structures in real time.
- The FPA is an efficient tool for geometric synthesis of wheel-legged suspension.
- Further improvements in the control system and HMI interface are considered.
- Enhanced versions of the FPA are planned to be applied in further research activities.
- Further research will cover both low-cost remote control and autonomous, AI-based systems applied to wheel-legged robots.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| HMI | Human–machine interface |
| SCADA | Supervisory control and data acquisition |
| MCU | Microcontroller unit |
| RF | Radio frequency |
| RC | Remote control |
| ADC | Analog-to-digital converter |
| IDE | Integrated development environment |
| PWM | Pulse width modulation |
| SPI | Serial peripheral interface |
| UART | Universal asynchronous receiver/transmitter |
| BLDC | Brushless DC motor |
| GPIO | General purpose input/output |
| IC | Inter-integrated circuit |
| SVM | Space vector machine |
| FOC | Field-oriented control |
| PI | Proportional integral (controller) |
| PCB | Printed circuit board |
| FPA | Flower pollination algorithm |
| EMF | Electromagnetic field |
| DOF | Degree of freedom |
| ROS | Robotic Operating System |
| IoT | Internet of Things |
| IoRT | Internet of Robotic Things |
| LTE | Long-term evolution |
References
- Lopes, D.; Coelho, L.; Silva, M.F. Development of a Collaborative Robotic Platform for Autonomous Auscultation. Appl. Sci. 2023, 13, 1604. [Google Scholar] [CrossRef]
- Min, H. Smart Warehousing as a Wave of the Future. Logistics 2023, 7, 30. [Google Scholar] [CrossRef]
- Liu, X.; Cao, J.; Yang, Y.; Jiang, S. CPS-Based Smart Warehouse for Industry 4.0: A Survey of the Underlying Technologies. Computers 2018, 7, 13. [Google Scholar] [CrossRef]
- Sangbae, K.; Wensing, P.M. Design of Dynamic Legged Robots. Foundations and Trends. Robotics 2017, 5, 117–190. [Google Scholar] [CrossRef]
- Wang, K.; Zhao, H.; Meng, F.; Zhang, X. Research on the Jumping Control Methods of a Quadruped Robot That Imitates Animals. Biomimetics 2023, 8, 36. [Google Scholar] [CrossRef]
- Ning, M.; Yang, J.; Zhang, Z.; Li, J.; Wang, Z.; Wei, L.; Feng, P. Method of Changing Running Direction of Cheetah-Inspired Quadruped Robot. Sensors 2022, 22, 9601. [Google Scholar] [CrossRef]
- Hutter, M.; Gehring, C.; Jud, D.; Lauber, A.; Dario Bellicoso, C.; Tsounis, V.; Hwangbo, J.; Bodie, K.; Fankhauser, P.; Bloesch, B.; et al. Anymal—A highly mobile and dynamic quadrupedal robot. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016; pp. 38–44. [Google Scholar] [CrossRef]
- Silva, M.F.; Goher, K.; Funk, M.; Tokhi, M.O.; Mendes, A. Robotics in Natural Settings: Proceedings of 25th Conference Series on Climbing and Walking Robots and Support Technologies for Mobile Machines CLAWAR 2022, Ponta Delgada, Portugal, 12–14 September 2022; Springer International Publishing: Berlin/Heidelberg, Germany, 2023. [Google Scholar] [CrossRef]
- Krejci, J.; Babiuch, M.; Babjak, J.; Suder, J.; Wierbica, R. Implementation of an Embedded System into the Internet of Robotic Things. Micromachines 2023, 14, 113. [Google Scholar] [CrossRef]
- Noga, M.; Juhas, M.; Gulan, M. Hybrid Virtual Commissioning of a Robotic Manipulator with Machine Vision Using a Single Controller. Sensors 2022, 22, 1621. [Google Scholar] [CrossRef] [PubMed]
- Omron Machine Iterface NA Series V457 CSM3.1. Omron Corporation Industrial Automation Company. 2023. Available online: https://assets.omron.eu/downloads/datasheet/en/v14/v457machine_interface_na5-v1_series_datasheet_en.pdf (accessed on 12 June 2023).
- Malarczyk, M.; Kaminski, M.; Szrek, J. Metaheuristic Approach to Synthesis of Suspension System of Mobile Robot for Mining Infrastructure Inspection. Sensors 2022, 22, 8839. [Google Scholar] [CrossRef]
- Roque, L.A.C.; Fontes, D.B.M.M.; Fontes, F.A.C.C. A Metaheuristic Approach to the Multi-Objective Unit Commitment Problem Combining Economic and Environmental Criteria. Energies 2017, 10, 2029. [Google Scholar] [CrossRef]
- Balderas, D.; Ortiz, A.; Méndez, E.; Ponce, P.; Molina, A. Empowering Digital Twin for Industry 4.0 using metaheuristic optimization algorithms: Case study PCB drilling optimization. Int. J. Adv. Manuf. Technol. 2021, 113, 1295–1306. [Google Scholar] [CrossRef]
- Sun, L.; Koopialipoor, M.; Jahed Armaghani, D.; Tarinejad, R.; Tahir, M.M. Applying a meta-heuristic algorithm to predict and optimize compressive strength of concrete samples. Eng. Comput. 2021, 37, 1133–1145. [Google Scholar] [CrossRef]
- Knypinski, L.; Kuroczycki, S.; Marquez, F.P.G. Minimization of Torque Ripple in the Brushless DC Motor Using Constrained Cuckoo Search Algorithm. Electronics 2021, 10, 2299. [Google Scholar] [CrossRef]
- Iwendi, C.; Maddikunta, P.K.R.; Gadekallu, T.R.; Lakshmanna, K.; Bashir, A.K.; Piran, M.J. A metaheuristic optimization approach for energy efficiency in the IoT networks. Softw. Pract. Exper. 2021, 51, 2558–2571. [Google Scholar] [CrossRef]
- Nassef, A.M.; Abdelkareem, M.A.; Maghrabie, H.M.; Baroutaji, A. Review of Metaheuristic Optimization Algorithms for Power Systems Problems. Sustainability 2023, 15, 9434. [Google Scholar] [CrossRef]
- Devarapalli, R.; Sinha, N.; Rao, B.; Knypinski, L.; Lakshmi, N.; Marquez, F. Allocation of real power generation based on computing over all generation cost: An approach of Salp Swarm Algorithm. Arch. Electr. Eng. 2021, 70, 337–349. [Google Scholar] [CrossRef]
- Alizadehsani, R.; Roshanzamir, M.; Izadi, N.H.; Gravina, R.; Kabir, H.M.D.; Nahavandi, D.; Alinejad-Rokny, H.; Khosravi, A.; Acharya, U.R.; Nahavandi, S.; et al. Swarm Intelligence in Internet of Medical Things: A Review. Sensors 2023, 23, 1466. [Google Scholar] [CrossRef] [PubMed]
- Rezk, H.; Olabi, A.G.; Wilberforce, T.; Sayed, E.T. A Comprehensive Review and Application of Metaheuristics in Solving the Optimal Parameter Identification Problems. Sustainability 2023, 15, 5732. [Google Scholar] [CrossRef]
- Ma, Z.; Wu, G.; Ponnuthurai, N.S.; Song, A.; Luo, Q. Performance assessment and exhaustive listing of 500+ nature-inspired metaheuristic algorithms. Swarm Evol. Comput. 2023, 77, 101248. [Google Scholar] [CrossRef]
- Knypinski, L. Performance analysis of selected metaheuristic optimization algorithms applied in the solution of an unconstrained task. COMPEL— Int. J. Comput. Math. Electr. Electron. Eng. 2021, 41, 1271–1284. [Google Scholar] [CrossRef]
- Khatri, M.; Dahiya, P.; Chaturvedi, A. Performance Enhancement of Suspension System of an Electric Vehicle Using Nature Inspired Meta-Heuristic Optimization Algorithm. In Ubiquitous Intelligent Systems. Smart Innovation, Systems and Technologies; Springer: Singapore, 2021; Volume 243. [Google Scholar] [CrossRef]
- Yildiz, B.S.; Yildiz, A.R.; Albak, E.I.; Abderazek, H.; Sait, S.M.; Bureerat, S. Butterfly optimization algorithm for optimum shape design of automobile suspension components. Mater. Test. 2020, 62, 365–370. [Google Scholar] [CrossRef]
- Yildiz, B.S. Optimal design of automotive suspension springs using Differential Evolution Algorithm. Uludağ Üniversitesi Mühendislik Fakültesi Dergisi 2018, 23, 207–214. [Google Scholar] [CrossRef][Green Version]
- Zhu, L. Optimal Design of Suspension Control of Superconducting Gyroscope Rotor Based on Flower Pollination Algorithm. In Proceedings of the 2020 IEEE 3rd International Conference on Information Systems and Computer Aided Education (ICISCAE), Dalian, China, 27–29 September 2020; pp. 282–285. [Google Scholar] [CrossRef]
- Vasconcelos, G.J.Q.; Costa, G.S.R.; Spina, T.V.; Pedrini, H. Low-Cost Robot for Agricultural Image Data Acquisition. Agriculture 2023, 13, 413. [Google Scholar] [CrossRef]
- Boloz, L.; Bialy, W. Automation and Robotization of Underground Mining in Poland. Appl. Sci. 2020, 10, 7221. [Google Scholar] [CrossRef]
- Park, S.; Ahn, S.; Shin, J.; Kim, H.; Yang, J.; Kim, Y.; Lim, K.; Seo, T. WAVE: Last Mile Delivery Robotic Platform With Stair-Climbing Ability Via Four-Bar Linkage-Based Locomotion. IEEE/ASME Trans. Mechatron. 2023, 1–11. [Google Scholar] [CrossRef]
- Morlando, V.; Cacace, J.; Ruggiero, F. Online Feet Potential Fields for Quadruped Robots Navigation in Harsh Terrains. Robotics 2023, 12, 86. [Google Scholar] [CrossRef]
- Stefanski, T.; Zawarczynski, L. Parametric identification of PM motor mathematical models. Prz. Elektrotechniczny 2012, 88, 224–229. [Google Scholar]
- Sikora, A.; Zielonka, A.; Woźniak, M. Minimization of Energy Losses in the BLDC Motor for Improved Control and Power Supply of the System under Static Load. Sensors 2022, 22, 1058. [Google Scholar] [CrossRef] [PubMed]
- Mohanraj, D.; Aruldavid, R.; Verma, R.; Sathiyasekar, K.; Barnawi, A.B.; Chokkalingam, B.; Mihet-Popa, L. A Review of BLDC Motor: State of Art, Advanced Control Techniques, and Applications. IEEE Access 2022, 10, 54833–54869. [Google Scholar] [CrossRef]
- Furmanik, M.; Gorel, L.; Konvičný, D.; Rafajdus, P. Comparative Study and Overview of Field-Oriented Control Techniques for Six-Phase PMSMs. Appl. Sci. 2021, 11, 7841. [Google Scholar] [CrossRef]
- Gamazo-Real, J.C.; Vázquez-Sánchez, E.; Gómez-Gil, J. Position and Speed Control of Brushless DC Motors Using Sensorless Techniques and Application Trends. Sensors 2010, 10, 6901–6947. [Google Scholar] [CrossRef] [PubMed]
- Tang, X.; Zhang, Z.; Liu, X.; Liu, C.; Jiang, M.; Song, Y. A Novel Field-Oriented Control Algorithm for Permanent Magnet Synchronous Motors in 60° Coordinate Systems. Actuators 2023, 12, 92. [Google Scholar] [CrossRef]
- Gupta, G.; Sreejeth, M. Study and Analysis of Field Oriented Control of Brushless DC Motor Drive using Hysteresis Current Control Technique. In Proceedings of the 2nd Asian Conference on Innovation in Technology (ASIANCON), Ravet, India, 26–28 August 2022; pp. 1–5. [Google Scholar] [CrossRef]
- Przybocki, P.; Vassilakis, V.G. An Analysis into Physical and Virtual Power Draw Characteristics of Embedded Wireless Sensor Network Devices under DoS and RPL-Based Attacks. Sensors 2023, 23, 2605. [Google Scholar] [CrossRef] [PubMed]
- Szabat, K.; Orlowska-Kowalska, T. Application of the Kalman Filters in the Self-Commissioning High-Performance Drive System with an Elastic Joint. In Kalman Filter Recent Advances and Applications; Intech: London, UK, 2009. [Google Scholar] [CrossRef][Green Version]
- Yakub, M.F.H.; Martono, W.; Akmeliawati, R. Vibration control of two-mass rotary system using improved NCTF controller for positioning systems. In Proceedings of the IEEE Control and System Graduate Research Colloquium (ICSGRC 2010), Shah Alam, Malaysia, 22 June 2010; pp. 61–67. [Google Scholar] [CrossRef]
- Bitria, R.; Palacín, J. Optimal PID Control of a Brushed DC Motor with an Embedded Low-Cost Magnetic Quadrature Encoder for Improved Step Overshoot and Undershoot Responses in a Mobile Robot Application. Sensors 2022, 22, 7817. [Google Scholar] [CrossRef] [PubMed]
- Abdullah, L.; Jamaludin, Z.; Rafan, N.A.; Jamaludin, J.; Chiew, T.H. Assessment on tracking error performance of Cascade P/PI, NPID and N-Cascade controller for precise positioning of xy table ballscrew drive system. In Proceedings of the 5th International Conference on Mechatronics (ICOM’13), Kuala Lumpur, Malaysia, 2–4 July 2013. [Google Scholar] [CrossRef]
- Raspberry Pi Pico Technical Reference. Available online: https://datasheets.raspberrypi.com/rp2040/rp2040-datasheet.pdf (accessed on 12 June 2023).
- STM32F103 Technical Reference. Available online: https://www.st.com/resource/en/datasheet/stm32f103c8.pdf (accessed on 12 June 2023).
- ESP32 Technical Reference. Available online: https://www.espressif.com/sites/default/files/documentation/esp32_technical_reference_manual_en.pdf (accessed on 12 June 2023).
- Yang, X.S. Flower Pollination Algorithm for Global Optimization. In Proceedings of the Unconventional Computation and Natural Computation: 11th International Conference (UCNC 2012), Orleans, France, 3–7 September 2012; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, D.; Renner, S. A new self-pollination mechanism. Nature 2004, 431, 39–40. [Google Scholar] [CrossRef] [PubMed]
- Frankel, R.; Galun, E. Pollination Mechanisms, Reproduction and Plant Breeding; Springer: Berlin/Heidelberg, Germany, 1977. [Google Scholar] [CrossRef]
- Lalljith, S.; Fleming, I.; Pillay, U.; Naicker, K.; Naidoo, Z.J.; Saha, J.K. Applications of Flower Pollination Algorithm in Electrical Power Systems: A Review. IEEE Access 2022, 10, 8924–8947. [Google Scholar] [CrossRef]
- Abdel-Basset, M.; Mohamed, R.; Saber, S.; Askar, S.S.; Abouhawwash, M. Modified Flower Pollination Algorithm for Global Optimization. Mathematics 2021, 9, 1661. [Google Scholar] [CrossRef]
- Li, G.; Wang, T.; Chen, Q.; Shao, P.; Xiong, N.; Vasilakos, A. A Survey on Particle Swarm Optimization for Association Rule Mining. Electronics 2022, 11, 3044. [Google Scholar] [CrossRef]
- Brezocnik, L.; Fister, I.; Podgorelec, V. Swarm Intelligence Algorithms for Feature Selection: A Review. Appl. Sci. 2018, 8, 1521. [Google Scholar] [CrossRef]
- Tan, X.; Liu, D.; Xiong, H. Optimal Control Method of Path Tracking for Four-Wheel Steering Vehicles. Actuators 2022, 11, 61. [Google Scholar] [CrossRef]
- Balkwill, J. Chapter 7—Suspension Kinematics in Performance Vehicle Dynamics. In Engineering and Applications; Elsevier: Oxford, UK, 2018; pp. 197–239. [Google Scholar] [CrossRef]












| Parameter | Value |
|---|---|
| a | 32 cm |
| b | [10,15] cm |
| c | [32,40] cm |
| e | 40 cm |
| [5,10] cm | |
| [0,5] cm | |
| [0,5] cm | |
| [15,20] cm |
| Parameter | Value |
|---|---|
| Population size | 20 |
| Main loop iteration count | 20 |
| Probability switch, P | 0.8 |
| [0,20] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Malarczyk, M.; Kaczmarczyk, G.; Szrek, J.; Kaminski, M. Internet of Robotic Things (IoRT) and Metaheuristic Optimization Techniques Applied for Wheel-Legged Robot. Future Internet 2023, 15, 303. https://doi.org/10.3390/fi15090303
Malarczyk M, Kaczmarczyk G, Szrek J, Kaminski M. Internet of Robotic Things (IoRT) and Metaheuristic Optimization Techniques Applied for Wheel-Legged Robot. Future Internet. 2023; 15(9):303. https://doi.org/10.3390/fi15090303
Chicago/Turabian StyleMalarczyk, Mateusz, Grzegorz Kaczmarczyk, Jaroslaw Szrek, and Marcin Kaminski. 2023. "Internet of Robotic Things (IoRT) and Metaheuristic Optimization Techniques Applied for Wheel-Legged Robot" Future Internet 15, no. 9: 303. https://doi.org/10.3390/fi15090303
APA StyleMalarczyk, M., Kaczmarczyk, G., Szrek, J., & Kaminski, M. (2023). Internet of Robotic Things (IoRT) and Metaheuristic Optimization Techniques Applied for Wheel-Legged Robot. Future Internet, 15(9), 303. https://doi.org/10.3390/fi15090303