Abstract
Unmanned Aerial Vehicles (UAVs) equipped with communication technologies have gained significant attention as a promising solution for providing wireless connectivity in remote, disaster-stricken areas lacking communication infrastructure. However, enabling UAVs to provide communications (e.g., UAVs acting as flying base stations) in real scenarios requires the integration of various technologies and algorithms. In particular 3D path planning algorithms are crucial in determining the optimal path free of obstacles so that UAVs in isolation or forming networks can provide wireless coverage in a specific region. Considering that most of the existing proposals in the literature only address path planning in a 2D environment, this paper systematically studies existing path-planning solutions in UAVs in a 3D environment in which optimization models (optimal and heuristics) have been applied. This paper analyzes 37 articles selected from 631 documents from a search in the Scopus database. This paper also presents an overview of UAV-enabled communications systems, the research questions, and the methodology for the systematic mapping study. In the end, this paper provides information about the objectives to be minimized or maximized, the optimization variables used, and the algorithmic strategies employed to solve the 3D path planning problem.
1. Introduction
Unmanned aerial vehicles (UAVs) are autonomous aerial devices that do not need to be manned by humans [1]; this condition has made them very popular and helpful for various applications in different areas, such as agriculture, photometry, rescue, the army, communications systems, etc. Deploying individual or group UAVs (i.e., forming networks) allows exploration in very complex, dangerous, and difficult-to-reach places, enabling significant savings in time and cost and decreasing the loss of human lives [2]. Furthermore, UAVs can be stand-alone structures or complement communication systems such as cellular networks [3]. Communication systems using UAVs (UAV-CS) have become very prominent due to their low cost and rapid network deployment, which are used in post-disaster scenarios and help save human and material lives [2]. UAVs, part of a communications system, can be used in various areas, such as base stations (AUV-BS), access points (UAV-AP), routers, and gateways.
UAVs can be controlled by human assistance, but they can also be autonomous, which is a significant challenge in 3D path planning. Path planning aims to enable UAVs to move (fly) in a path free of obstacles to avoid collisions considering route integrity (coverage of the entire desired route) and optimality (e.g., the shortest path or a path that produces less energy consumption). Table 1 summarizes the studies related to 3D path planning, demonstrating the uniqueness of our research.

Table 1.
Summary of path planning surveys.
Prior research has investigated UAV planning in 2D. For instance, in [12], the authors discuss the path-planning problem involving continuous interaction with the environment and provide an overview of motion planning algorithms. In [13] the authors examine state-of-the-art path planning in automation, robotics, UAVs, and video games, considering as a secondary feature 3D path planning. In [14] the authors present a preliminary taxonomy of most UAV 3D path-planning algorithms, but no exhaustive description is provided. On the other hand, ref. [10] analyzes intelligent computational algorithms considering 2D and 3D scenarios. In contrast, our study concentrates on traditional optimization algorithms. The authors in [9] present a general description of 3D path planning algorithms based on the type of solution. Likewise, ref. [1] present basic concepts, algorithms, and parameters used in the path planning problem without performing a systematic study. In contrast, the study in this paper analyzes contributions in the last four years considering parameters used in the objective function, encompassing optimization objectives, environment characteristics, obstacles, number of UAVs, and optimization variables.
In this regard, this paper presents a systematic review of the 3D path-planning techniques during the last four years, and it offers valuable insights and comprehensive analysis of existing path-planning solutions in UAVs operating in a 3D environment helping researchers, academics, and professionals involved in UAV technology, wireless communications, and path-planning algorithms. This paper first provides an overview of UAV-enabled communications systems, including the path planning algorithms. Then, a detailed description of the methodology used to perform the systematic mapping studio is presented. In the end, this paper presents the objective functions, the optimization variables, and the proposed solutions related to the optimization models, including optimal or exact methods and suboptimal or heuristic strategies.
The rest of the paper is organized as follows. Section 2 provides a background for a better understanding of this study. Section 3 presents the research method, including the research questions and classification scheme. Section 4 provides the mapping study results, responding to the research questions formulated. Section 5 involves analyzing the identified trends and noting any observed gaps that require further investigation. Finally, Section 7 presents the conclusions.
2. Background
This section summarizes the fundamental concepts for understanding this study, including the general features of UAV-enabled communication systems, 3D path planning algorithms, and the proposed strategies.
2.1. Unmanned Aerial Vehicles (UAVs)
UAVs are flying devices (aircraft) that do not require a human pilot on board and are equipped with radio communication modules. These devices can be controlled manually by a human at a base station on the ground or autonomously through flight programs. The advance in miniaturization technology and the development of integrated systems have achieved a considerable reduction in the physical size of the UAV, and likewise lowering its cost [15].
Using UAVs as Aerial Base Stations (ASBs) is an alternative technology that can provide efficient wireless connectivity to users on the ground. Due to its mobility and flexibility, an ASB can help with increased coverage capacity on demand. Service providers can use this solution for dynamic network densification, rapid network deployment in an emergency, or temporary coverage of an area [3]. Other applications of UAVs are in the military area, as well as in the civil area, whether in surveillance, location, 3D aerial mapping for earthmoving projects, disaster scenarios, and ad hoc FANET (ad hoc FANET networks are a kind of self-organized decentralized wireless network carried by a group of UAVs (nodes), so that they can communicate with each other independently of the fixed infrastructure [16]) for search and rescue missions among other application scenarios [16].
2.2. Classification of UAVs
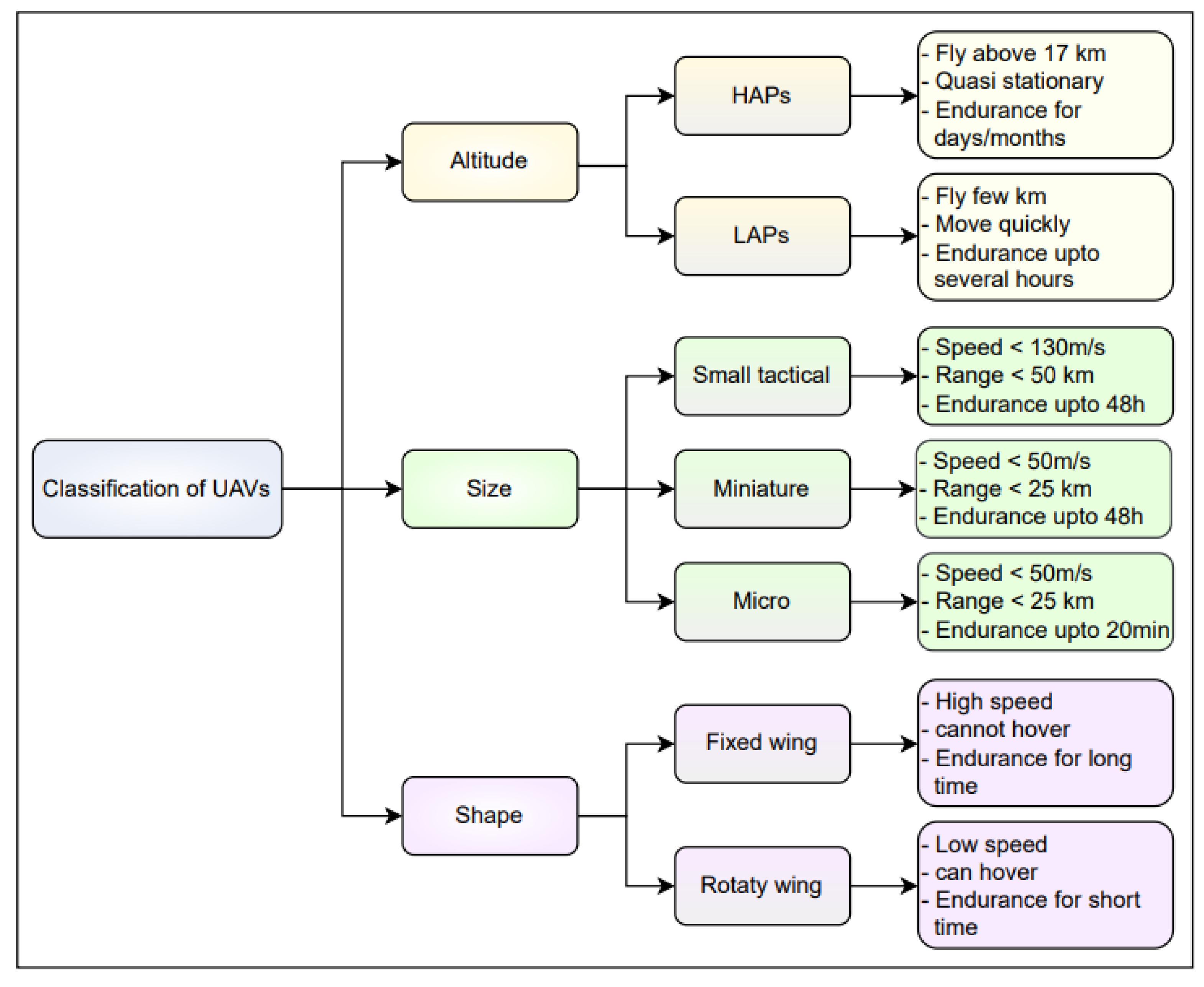
Each UAV has its own characteristics, which will depend greatly on the application in which it will be used and achieve the desired results. UAVs are classified based on several factors, either by their altitude, size, or shape [1]. For example, multi-rotor drones are the most used, such as quadrotors which are the cheapest, fastest, most efficient, and with better maneuverability. However, hexacopters and octocopters have better flight stability, fault tolerance, and more payload capacity [2]. Figure 1 presents a general classification of UAVs by altitude, size, and shape.
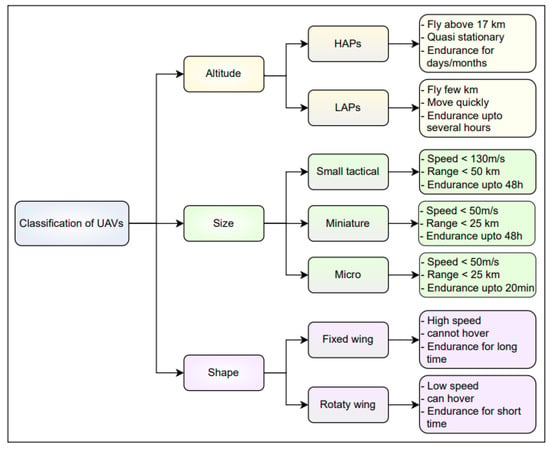
Figure 1.
Classification of UAVs [1].
2.3. Communications Systems Enabled by UAVs
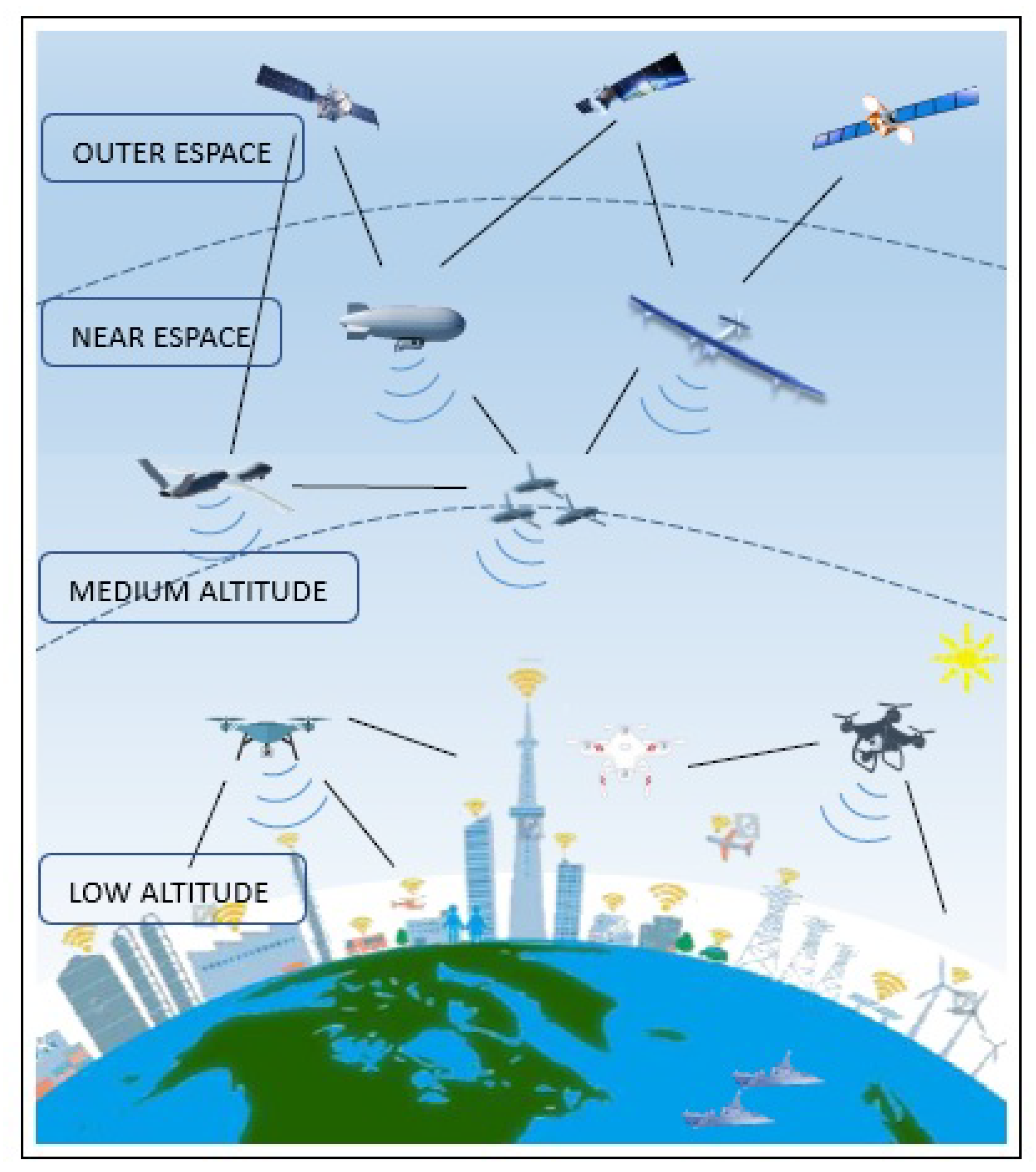
UAV-assisted wireless communication systems can be classified into two groups. The first group is represented by high-altitude, powerful aerial platforms symbolized by satellites in orbits. They can remain for a long time in space thanks to the advantages of orbital resources and solar energy. The second group represents the low-altitude aerial platforms which are symbolized by tethered aerostats/UAVs and relay communication UAVs and are widely used in fourth-generation (4G) and fifth-generation (5G) communications [15].
Many base stations are required to achieve dense communication coverage in 5G communications, so this would be quite expensive if terrestrial base stations were implemented. Using UAVs, low-altitude air base stations can be implemented, with significant advantages such as reduced costs, increased efficiency, effective coverage improvement, and flexible deployment [3]. Figure 2 shows the different UAV-enabled communication systems.
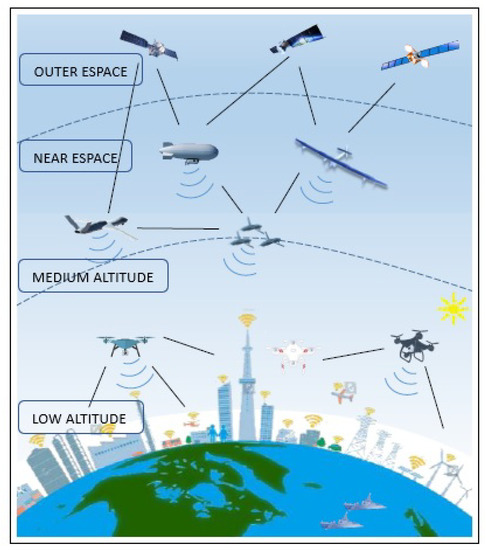
Figure 2.
3D communication network (high-altitude long-range communication and low-altitude high-density communication) [3].
However, the challenge to develop communications assisted by low-altitude UAVs has difficulties such as power consumption, interference avoidance, information security, etc. The energy consumption problem is given because batteries of finite capacity power the payload of a UAV and the flight mechanisms. Despite this, the air communication of the base station is expected to be sustainable and allow comprehensive coverage with battery replacement efforts or entire UAVs [17]. As a solution to this problem, trajectory optimization (i.e., the path planning) uses less power and achieves higher mission profitability, usually when power usage cannot be avoided.
With the evolution of technology and an exponential increase in users in the field of communication, UAVs are being widely used to meet this extraordinary demand required in the area of wireless communications, either for data collection from nodes Internet of Things (IoT) or to increase the range of communication and provide wireless connectivity to users. UAVs operate as base stations in disaster areas where communication systems are damaged [18]. UAVs are also used as a base station in locations and times when traffic flow increases. In the same way, they are widely used as links from UAVs to base stations to record and transmit the readings of an instrument as audio and video (known as radio communication). Another widespread use is the satellite-to-UAV link to carry weather and GPS information (satellite communication). Lastly, the UAV-to-UAV link, where data are shared with other UAVs through wireless communication [15].
2.4. 3D Path Planning
From the beginning, UAV path planning investigations were carried out only considering the position in two dimensions, without considering the height that the UAV must have. Over time, the researchers estimated the optimal position in the 3D dimension, taking factors such as a canal model for the rural, urban, and dense urban environments. This factor increases the complexity of the problem and is closer to the reality that UAVs must face in a communications system [1,3]. Three-dimensional path planning is a very complex topic. It has been investigated in recent years since it has the difficult task of finding the best collision-free route, defined as the path planning of the UAV from an initial position to an objective position (destination). The path is planned to minimize the completion time for a particular mission [15].
UAV path planning can be classified into two groups. The first group refers to path planning from start to finish, where the UAV must move between two fixed points while avoiding threats and obstacles. Meanwhile, the second group is coverage path planning, where the UAV will plan a path that covers the entire area as it stays away from obstacles [1]. This approach has changed, and there has been a greater interest in 3D perception for path planning, where perception constraints are considered in the planning problem. The methods developed in this field consider the quality of perception to reduce uncertainty in state estimation. That can be achieved by ensuring that particular objects and features remain within the limited detection field of view of the UAV [2].
In addition to traditional path planning methods, alternative approaches utilize constraint methods in 3D path planning. Constraint methods aim to achieve an optimal global path while maintaining a safe distance from obstacles in free space. However, these methods often exhibit conservative dynamic constraints, resulting in slower flight speeds. Another approach employs smooth constraints that leverage gradient information to maneuver obstacles away from the path. While this approach mitigates the risk of local minima, ensuring kinematic feasibility becomes a challenge [19].
Conversely, in the optimization of UAV paths, it is imperative to minimize factors such as cost, energy, and time. Path planning must strike a balance in minimizing these three elements. Efficiently optimizing the mission time of the UAV entails reducing battery consumption for completing the task, thereby decreasing path planning costs. Likewise, power optimization necessitates accomplishing the mission within the shortest feasible timeframe, leading to reduced path planning expenses [1]. Analyzing and considering these factors are essential for optimizing UAV path planning. Based on these considerations, the following points are taken into account:
- Cost: UAV path planning is considered profitable when the total cost of path planning decreases, such as the cost of batteries, hardware and software fees, additional charges such as cameras used to capture the images, sensors for detecting the environment, GPS to locate the position, initial cost of manufacturing and maintenance, etc. [1].
- Efficiency in Time: UAV path planning is considered efficient when the path is completed in the shortest possible time. This is achieved by optimizing a path and making it collision free from source to destination. An example of optimizing the communication time for fixed-wing UAVs is achieved by strategically planning the paths of the UAVs to minimize information transmission duration [15].
- Energy Efficiency: Energy efficient path planning is considered when UAVs use the minimum energy to complete their mission. The UAVs’ energy is optimized to achieve the mission and return to the destination [1].Energy consumption comprises three primary components: flying energy, which represents the energy expended by the UAV during its journey from the starting point to the destination; floating energy, which denotes the energy necessary for the UAV to stay airborne and fulfill its assigned task; and transmission energy, which refers to the energy utilized by the UAV for data transmission back to the source.
For UAV path planning to be implemented successfully, some aspects must be considered, such as the environment of the place where it will fly. The size of the area, the obstacles encountered during the flight, the quantity of UAVs involved in the mission, and the approach taken by the UAV in route planning are all crucial factors in path planning. These aspects will be further elaborated below [18].
- Number of UAVs: A mission can be carried out by one or several UAVs. The number of UAVs used will depend a lot on the type of application that will be developed, such as in a drone-controlled light show where several UAVs will require a well-defined path planning to avoid collisions and achieve the desired effect [20].
- Obstacles: Any object that interrupts the flight of the UAV is considered as an obstacle, it is for this reason that the path planning must be focused on detecting obstacles, avoiding these obstacles and guaranteeing its way to the destination. Obstacles can be classified as technical, which are the restrictions developed to successfully and economically complete a task. On the other hand, non-technical obstacles can be static limitations, such as buildings, mountains, trees, or dynamic limitations that become unexpected threats, such as a bird. To avoid both dynamic and static obstacles, the UAV may be equipping the UAV with sensors that allow it to detect obstacles at all times. Likewise, another way to avoid collisions is to define restricted flight areas [1].
- Environment: The environment can be uncertain as it frequently changes from static to dynamic. For this reason, the environment in which the UAV must fly must be known, and the path planning in uncertain environments. Several studies have been carried out in different habitats implementing different algorithms that can solve the complexity of an uncertain environment [1].
- Altitude: Three-dimensional path planning is somewhat complex because the altitude constantly changes, which causes the UAV to have to change its speed and direction frequently [1].
- Distance: This aspect is focused on the distance of the path planning. Online path planning is performed in real-time, and the environmental conditions must be considered while the UAV is heading to its destination. Offline path planning instead is developed before the UAV begins its flight. In this case, there is information about the terrain and obstacles where the UAV will develop its flight [1].
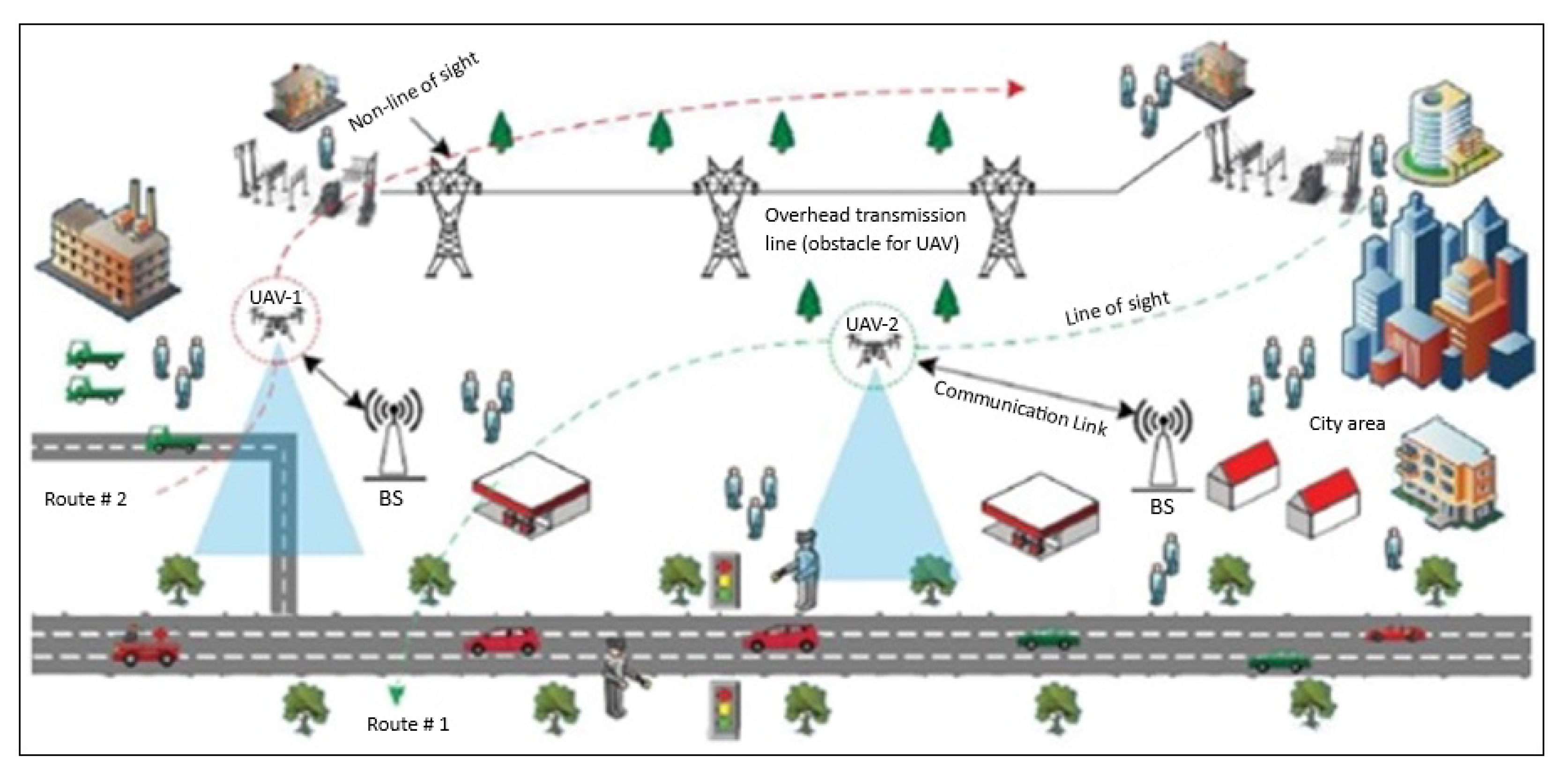
Figure 3 shows the environment of a city where a UAV must plan the best possible route to complete its mission. For this purpose, the UAV must know the area’s dimensions, obstacles that may arise during the flight, and the city’s environmental conditions. All these aspects are vital when planning an optimal path.
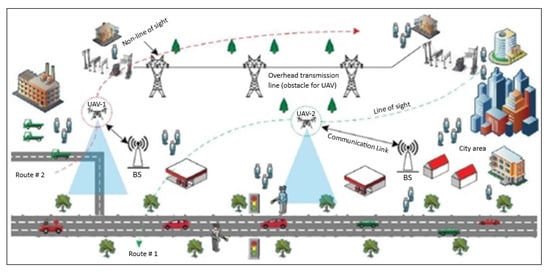
Figure 3.
Path planning of a network of UAVs for communications [1].
2.5. 3D Path Planning Algorithms
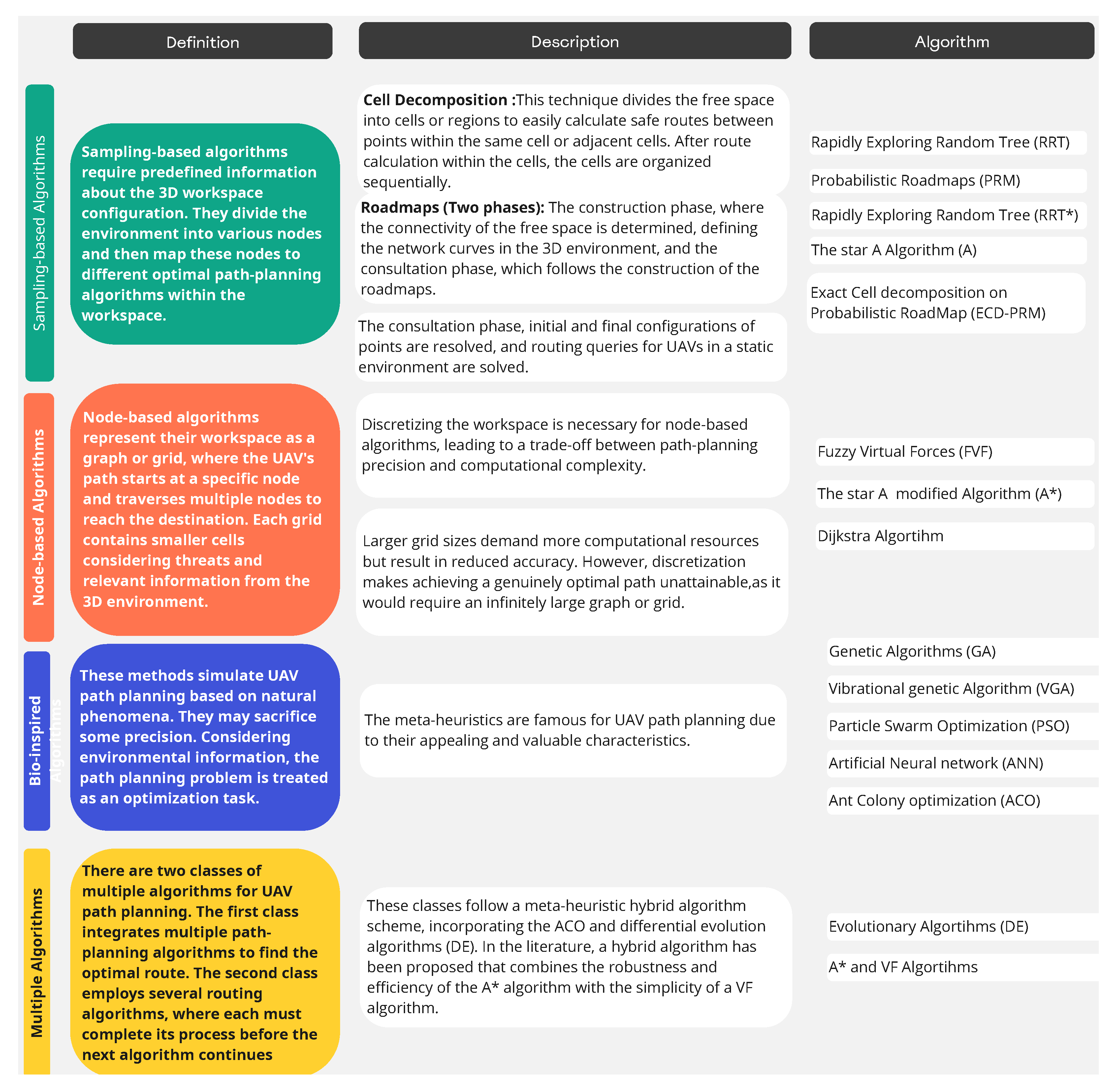
The performance of UAVs in finding the optimal route is determined by the algorithms used for three-dimensional path planning. These algorithms can be classified into four categories: sampling-based algorithms, node-based algorithms, bio-inspired algorithms, and multiple algorithms [15,19,21,22]. Figure 4 illustrates the classifications of these algorithms.
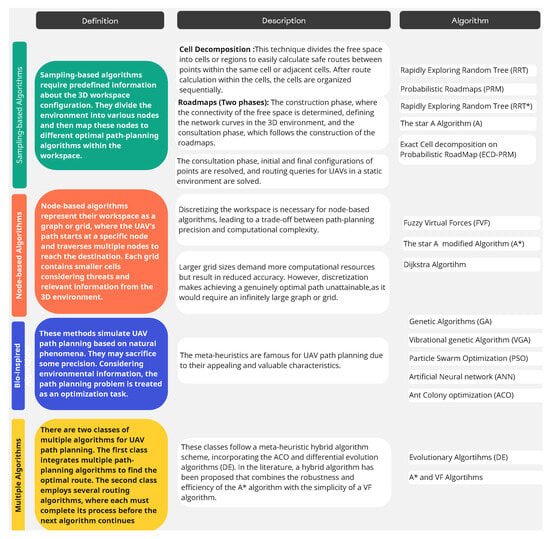
Figure 4.
Classification of 3D UAVs path planning algorithms.
3. Methodology: Mapping Study
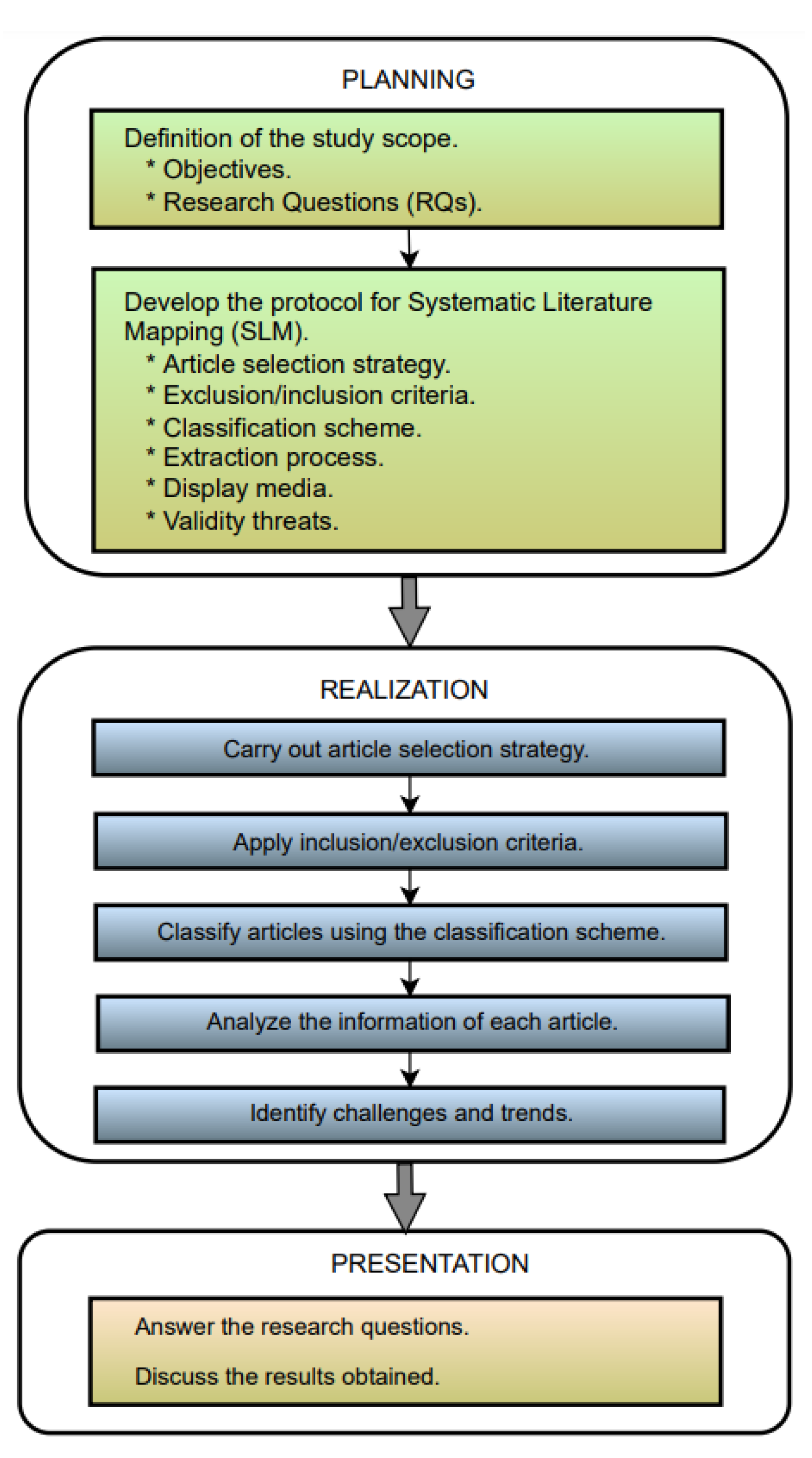
This section presents the methodology to study optimal and suboptimal algorithms for 3D path planning systematically. This research is carried out by searching for information in a complete database of bibliographic references such as “Scopus”. Once the bibliographic reference (journal and conference articles) is obtained, the documentation is organized and classified with the web tool called “CADIMA” [23]. In this application, the information of interest is filtered according to inclusion and exclusion criteria to carry out the systematic review of the classified literature. The entire methodology process followed is described in 3 stages: planning, realization, and presentation, as shown in Figure 5.
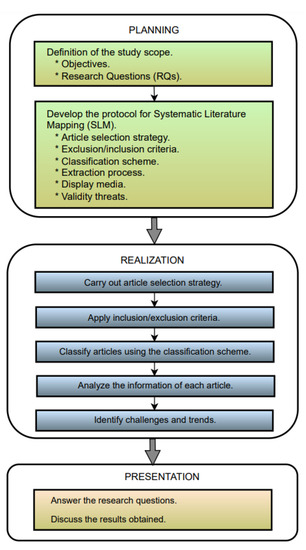
Figure 5.
Process flow and tasks of the systematic mapping study, based on [24].
3.1. Planning
3.1.1. Scope of the Study
This section presents the research questions that allow the classification of information related to 3D path-planning optimization solutions. Table 2 summarizes these research questions.
Table 2.
Research questions related to the systematic study of literature.
3.1.2. Paper Selection Strategy
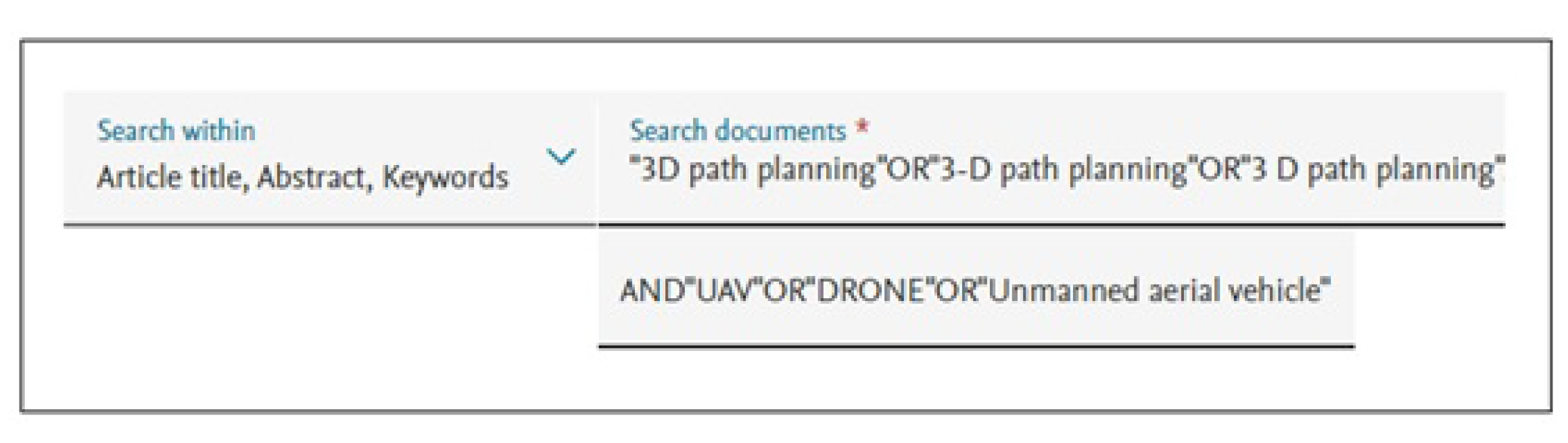
The search for existing documents related to this topic was conducted through the Scopus database that indexes important digital libraries such as IEEE, Xplore, Springer Link, Science Direct, or ACM. This database is complete and contains much information from the existing literature in a domain [24]. In this case, it corresponds to 3D path planning methods for UAVs. The search is based on the research questions and the keywords that generally cover the entire field of study. Figure 6 shows the first search string performed in Scopus for this study.
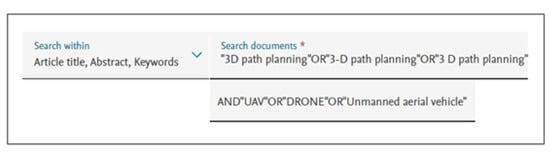
Figure 6.
Search string with keywords in Scopus.
From this first search string, a total of 1233 documents were obtained. As the number of articles is quite large, a second search is carried out with the inclusion and exclusion procedure indicated below.
3.1.3. Inclusion and Exclusion Procedure
The inclusion and exclusion process are filters used to exclude studies that are irrelevant to answer the research questions (RQs). To select the 1233 documents found in the first search string, a filter must be carried out with the inclusion and exclusion criteria in an automated and manual way that allows adequate information collection.
- Automated inclusion–exclusion: The inclusion–exclusion criteria can be automated and must have the following parameters: document type, language, years of publication, and subject area.
- Document type: The selected documents are journal articles, conference articles, and literature reviews.
- Language: Only English was selected because it is a universal language, and most relevant works are published in this language.
- Years of publication: To select the most up-to-date documentation, the documentation of the last four years is chosen (i.e., from 2019 to 2022).
- Thematic area: The area of our interest is Engineering and Computer Science.
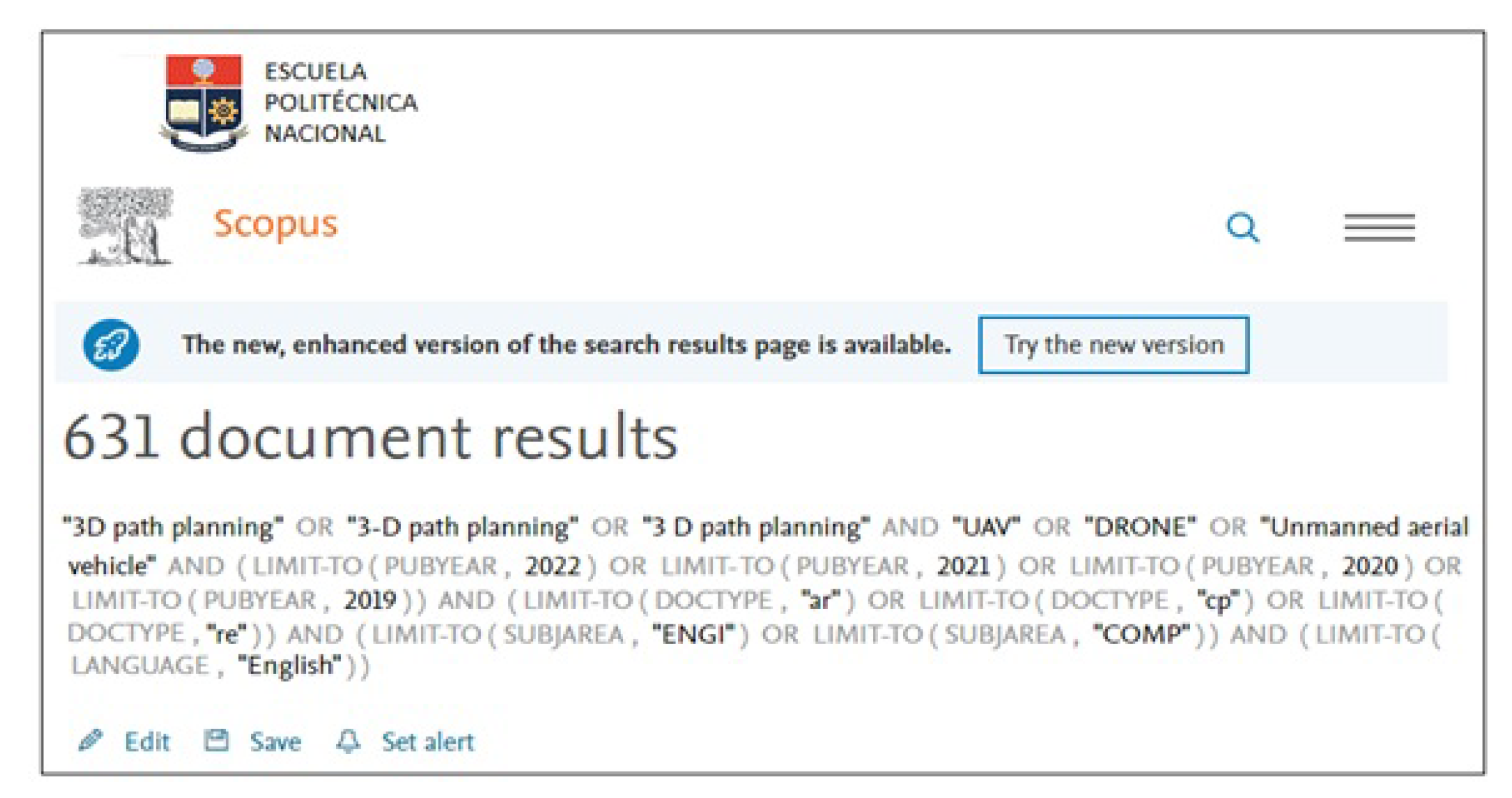
Once the filtering with the automatic inclusion–exclusion criteria is carried out, a new search string is generated, which is as follows:“3D path planning" OR “3-D path planning” OR “3 D path planning" AND “UAV” OR “DRONE” OR “Unmanned aerial vehicle” AND (LIMIT-TO (PUBYEAR, 2022) OR LIMIT-TO (PUBYEAR, 2021) OR LIMIT-TO (PUBYEAR, 2020) OR LIMIT-TO (PUBYEAR, 2019)) AND (LIMIT-TO (DOCTYPE, “ar”) OR LIMIT-TO (DOCTYPE, “cp”) OR LIMIT-TO (DOCTYPE, “re”)) AND (LIMIT-TO (SUBJAREA, “ENGI”) OR LIMIT-TO (SUBJAREA, “COMP")) AND (LIMIT-TO (LANGUAGE, “English”))Once this new search string was applied, the result of selected documents was 631, as seen in Figure 7.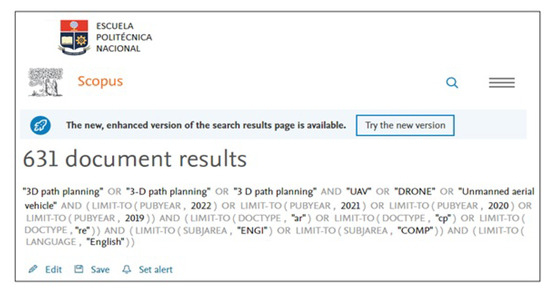 Figure 7. Search string with automatic inclusion–exclusion criteria.
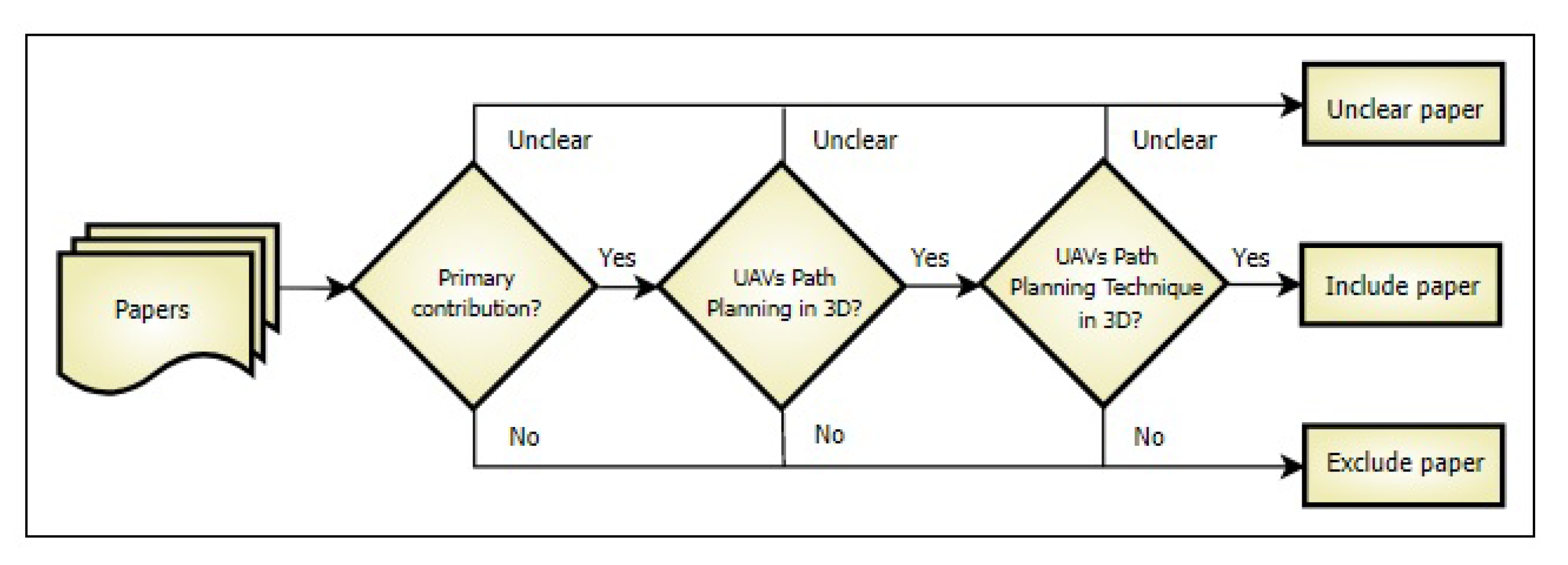
Figure 7. Search string with automatic inclusion–exclusion criteria. - Manual inclusion–exclusion: For the manual inclusion–exclusion criteria stage, the filters executed are the study researchers’ decisions. A decision tree makes it possible to be clear about the types of criteria applied at this stage, as shown in Figure 8.
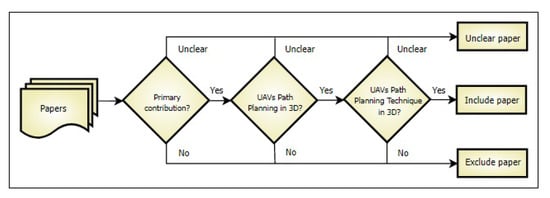 Figure 8. Decision tree for manual selection of papers, based on [24].The decision tree describes the processes that must be considered for the manual classification of the documents to be analyzed in this study. Of the 631 articles selected in the automated filtering stage, it is required to determine if these documents are primary (Primary Contribution: These are sources where the information provided has been published for the first time, resulting from intellectual work on a research topic or secondary (Secondary or Tertiary Contribution: Secondary sources are those that have primary, synthesized, and reorganized information. They allow knowing facts from data collected by others, whereas tertiary sources contain and summarize various primary and secondary sources to provide an overview of a given research topic [25]) contributions, belong to the domain of the research topic, and are related to 3D UAV path planning techniques.Suppose there are doubts about the classification of a document. The document is undoubtedly included for further coding if the contribution meets the three main characteristics specified in the decision tree. Contrary to this, if the paper only meets one or two of the three attributes of the decision tree, the document should be excluded. In that case, it can be marked as “Unclear” and subsequently analyzed to define whether or not it is included in the group of documents to be coded.Table 3 shows the list of inclusion–exclusion criteria used to evaluate the documents. It will be included if the paper meets all the requirements, but if any exclusion criteria are maintained, then the document is excluded.
Table 3. Manual inclusion and exclusion criteria.With the list of the 631 documents obtained in the automated inclusion–exclusion classification of the Scopus database, the free web tool “CADIMA” is used, which allows the manual inclusion–exclusion of the documentation to be carried out safely. In this stage of manual filtering, two document selection phases are carried out: the phase based on titles and abstracts and the phase based on full-text review.
Figure 8. Decision tree for manual selection of papers, based on [24].The decision tree describes the processes that must be considered for the manual classification of the documents to be analyzed in this study. Of the 631 articles selected in the automated filtering stage, it is required to determine if these documents are primary (Primary Contribution: These are sources where the information provided has been published for the first time, resulting from intellectual work on a research topic or secondary (Secondary or Tertiary Contribution: Secondary sources are those that have primary, synthesized, and reorganized information. They allow knowing facts from data collected by others, whereas tertiary sources contain and summarize various primary and secondary sources to provide an overview of a given research topic [25]) contributions, belong to the domain of the research topic, and are related to 3D UAV path planning techniques.Suppose there are doubts about the classification of a document. The document is undoubtedly included for further coding if the contribution meets the three main characteristics specified in the decision tree. Contrary to this, if the paper only meets one or two of the three attributes of the decision tree, the document should be excluded. In that case, it can be marked as “Unclear” and subsequently analyzed to define whether or not it is included in the group of documents to be coded.Table 3 shows the list of inclusion–exclusion criteria used to evaluate the documents. It will be included if the paper meets all the requirements, but if any exclusion criteria are maintained, then the document is excluded.
Table 3. Manual inclusion and exclusion criteria.With the list of the 631 documents obtained in the automated inclusion–exclusion classification of the Scopus database, the free web tool “CADIMA” is used, which allows the manual inclusion–exclusion of the documentation to be carried out safely. In this stage of manual filtering, two document selection phases are carried out: the phase based on titles and abstracts and the phase based on full-text review.- Phase of titles and abstracts: For the selection of the documents, the participation of one or more researchers (evaluators) is required. The researchers collaborate with the analysis and choice through the manual inclusion–exclusion criteria, with 20 percent of the information uploaded in CADIMA. The researchers discuss and resolve the divergences found in the classification of articles in scheduled meetings. At the end of this stage, there are 104 selected documents.
- Full-text phase: In this second phase, the evaluators carefully read the text of the documents selected in the first phase. The title is analyzed first, then the abstract, then the techniques used (algorithms), and finally, the conclusions. In this second selection phase, like the first phase, the researchers review 21 contributions (20 percent) of the 104. The researchers discuss and resolve the divergences found in the classification of articles in scheduled meetings.
Once the manual inclusion–exclusion process is completed, 37 documents are finally obtained for the coding process.
3.1.4. Classification Scheme and Data Extraction
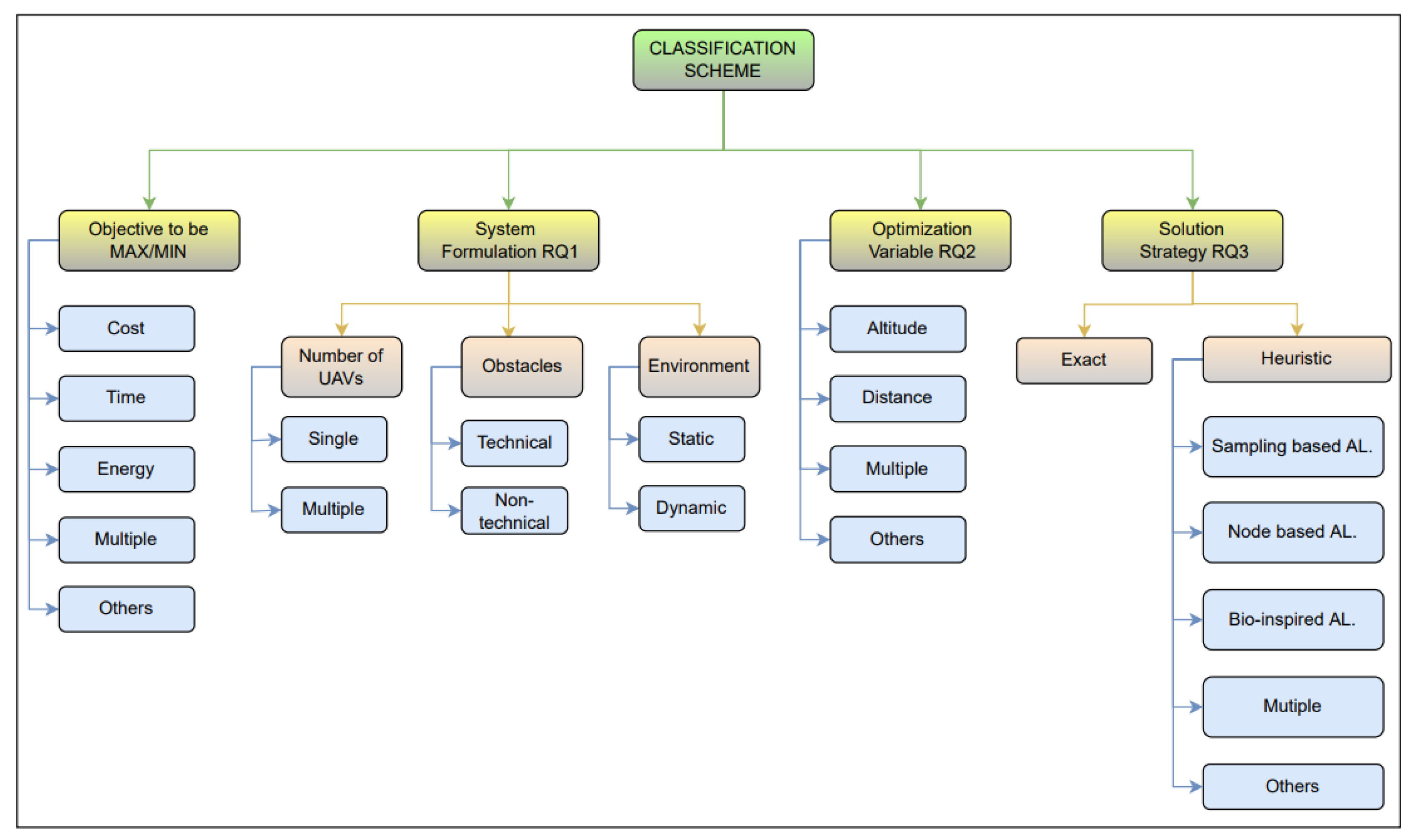
A classification scheme organizes critical information extracted from selected papers, enabling us to answer previously raised RQs. In this work, a part of the scheme is elaborated from existing classifications in Section 2.4 and Section 2.5. Subsequently, this scheme is completed and refined, including new categories (for example, new path planning techniques) or dividing types into subcategories (for example, classification and subclassification of path planning techniques). In addition, for the classification of information, ref. [1] is taken as a reference to establish well-defined categories. Figure 9 shows the dimensions and attributes coded at this stage.
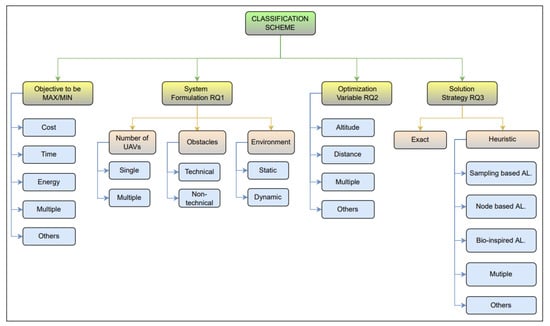
Figure 9.
Classification scheme.
Figure 9 shows the information to be extracted during the coding stage of the selected papers. Four main dimensions (yellow boxes) have been created: the RQs posed in the Planning stage. In turn, each dimension has a certain number of attributes (light blue boxes), which are those data that need to be extracted from each of the contributions. From the same paper, one or several attributes can be extracted for a certain dimension. Each of these dimensions and their attributes is described below.
- Target to be optimized (minimized or maximized): This dimension identifies the target for optimal path planning of UAVs in a 3D environment, with the following categories considered:
- Cost: Refers to the cost associated with path planning, which may be the cost of batteries, hardware and software fees, additional charges such as cameras used to capture the images, sensors to detect the environment, GPS to locate the position, and cost of initial manufacturing and maintenance.
- Time: It is generally associated with minimizing the UAV path’s time or the UAV communication’s information transmission time.
- Energy: Refers to the minimization of energy consumption to complete its mission.
- Multiple: This category considers more than one objective (objective function) to optimize.
- Others: This field includes additional attributes to those mentioned above.
System Formulation: This dimension defines the specific problem addressed in UAV path planning in 3D. It is composed of the number of UAVs, obstacles, and environment.- Number of UAVs: It means the number of UAVs used in the formulation of the problem, could be:
- (a)
- Simple: It means that only one UAV was used.
- (b)
- Multiple: It means that more than one UAV was used.
- Obstacle: Anything that interrupts the flight of the UAV is considered an obstacle. The types of obstacles considered are technical and non-technical.
- (a)
- Technical: Constraints that are developed to successfully and economically complete a task.
- (b)
- Non-technical: They can be static or dynamic limitations. Static obstacles are made up of buildings, mountains, trees, etc. Dynamic obstacles are unexpected threats, such as a bird.
- Environment: In UAV path planning, it is essential to know the environment in which the UAV has to fly. The environment can be static or dynamic.
- (a)
- Static: It means that the environment will not change throughout the route.
- (b)
- Dynamic: It means that the environment is uncertain; it will constantly be changing.
Optimization variables: These are the model variables that can be optimized. The variables considered for optimization are altitude and distance.- Altitude: It is the height of the UAVs with respect to the ground.
- Distance: It is the distance that the UAVs must travel to complete the mission.
- Multiple: It means that there may be more than one variable to optimize.
- Others: It means that there may be other variables to optimize.
Solution Strategy: Covers all aspects used to solve the problem. As strategies, exact and heuristic algorithms have been considered.- Exact Algorithms: They guarantee that the solution found is the best possible, that is, the optimal solution, although they have the disadvantage that they invest a lot of time in execution [26].
- Heuristic Algorithms: They are approximate techniques capable of obtaining reasonable quality solutions in a limited time but without being able to certify that these solutions are optimal [26].
- (a)
- Based on Sampling: They need a mathematical representation of the workspace. These methods then sample nodes or cells, usually stochastically.
- (b)
- Node-Based: Define the workspace as a graph or a grid, where the path is defined between grid nodes.
- (c)
- Bio-inspired: They present the path planning of UAVs through natural phenomena, so they are not accurate enough.
- (d)
- Multiple: It means that there can be more than one heuristic algorithm.
- (e)
- Others: It means that other heuristic algorithms may exist.
3.2. Realization
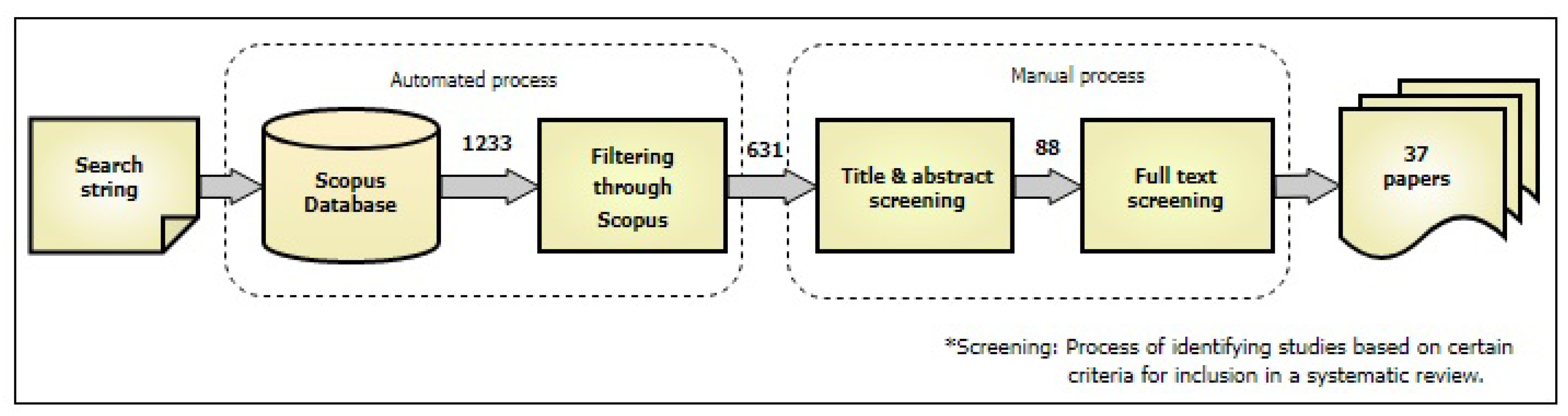
The realization phase is the process that allows answering the research questions posed in the phase of the scope of the study. Focused on this task, we explore the documents in the Scopus database using the search string defined in the previous phase of automated inclusion–exclusion by filtering the information with the previously proposed processes and codifying the resulting documents with the implemented classification scheme. On 29 July 2022, 631 articles were obtained in the automated inclusion–exclusion phase. Applying the following filter, the manual inclusion–exclusion phase, 37 articles were finally selected, with which this study was performed. Figure 10 presents a diagram of the document selection process and the filtering with the inclusion and exclusion criteria.
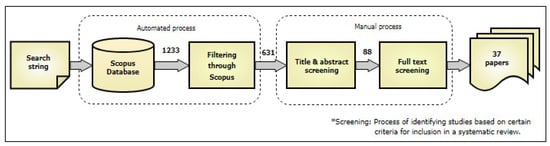
Figure 10.
Scope of the study, based on [24].
Table 4 shows the list of the 37 selected papers. For better identification and understanding of the tables, an “A-XX” code was generated for each paper, where the letter A corresponds to the initial of the paper, followed by a sequential number. These items are in no particular order. Hereinafter, the papers will be identified with this code.
Table 4.
List of analyzed papers.
From the 37 selected documents, all the relevant information is extracted that allows the classification of the techniques used to solve the problem of collision-free 3D path planning in the shortest possible time, as well as the assignment of the maturity level of the research conducted.
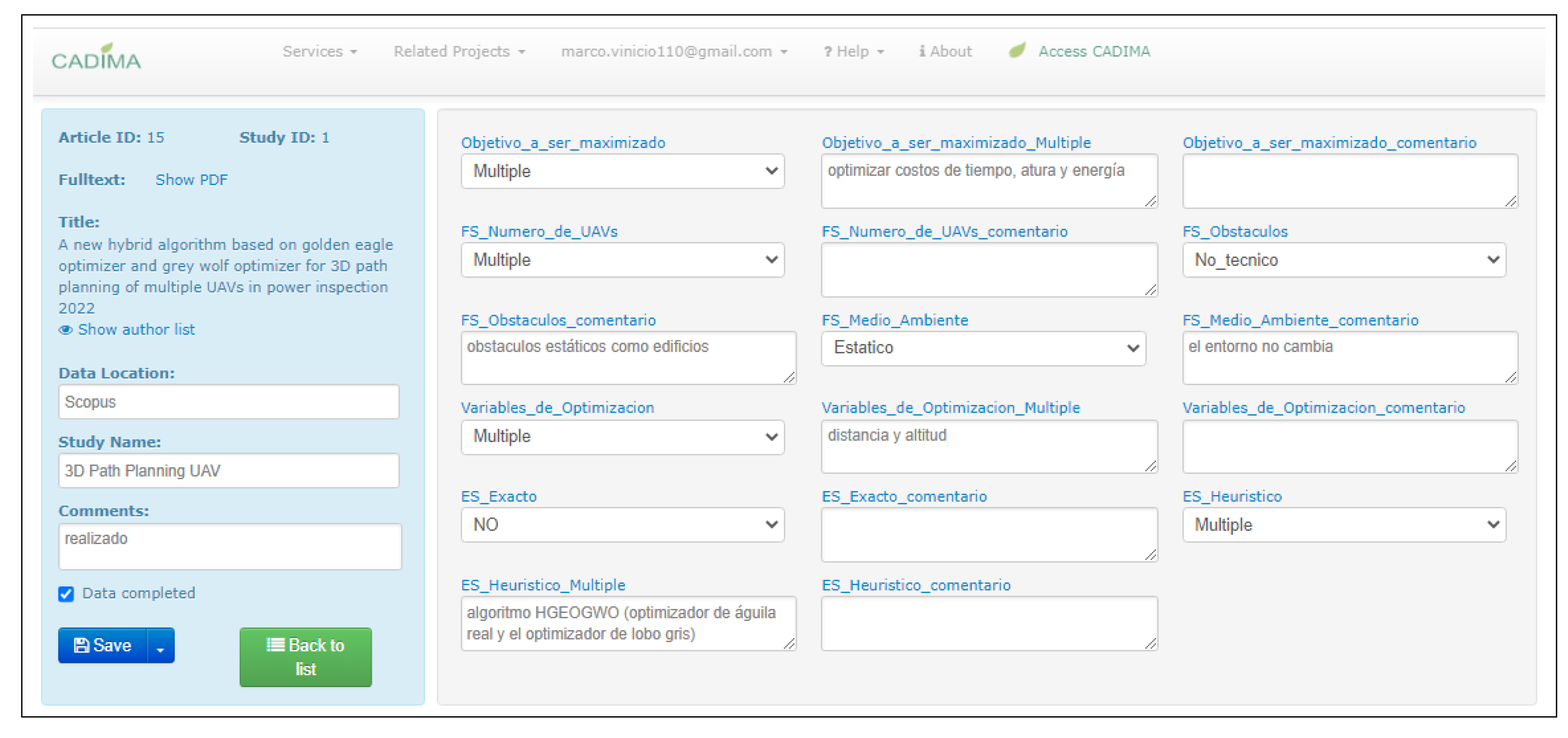
After the selected documents’ data extraction has been completed, this information is stored in the CADIMA platform. To view the information collected, it is necessary to download the file in Excel spreadsheet format from the application’s website in the data extraction section. This file and the others related to the mapping study are available in this repository: https://github.com/marcomorales01/palth-planing-UAVs-3D (accessed on 5 March 2023). Figure 11 shows an example of the data extraction process carried out on a paper in the CADIMA platform.
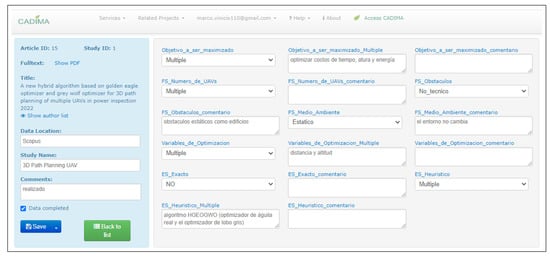
Figure 11.
Scope of the study, based on [24].
3.3. Presentation
In this stage, the answers to the three research questions above are reported: (i) 3D UAV path planning, (ii) optimal methods for 3D UAV path planning, and (iii) methods approximate for path planning in UAVs in 3D. All this information is presented in tables and graphically to be understood clearly and easily, with its respective description of results. Additionally, a discussion is carried out about the most relevant data obtained after coding the documents under study. Detailed information is presented in the following sections.
4. Results
4.1. RQ1—Is There UAV Path Planning in 3D?
RQ1 seeks to provide information on the objectives to be optimized, such as the minimum mission completion time so that the UAV consumes less energy and its total cost of 3D path planning is minimized. An optimal or feasible 3D UAV route must be cost-effective and efficient in time and energy; for this, the formulation of the system in path planning must also be considered, where certain factors must be known for the successful completion of the mission. The UAV must see the environment where it is going to fly, the dimensions of the area, and the number of UAVs used to complete the mission and be prepared for the obstacles that may arise during the flight. These aspects are essential in the path planning of the UAVs in 3D.
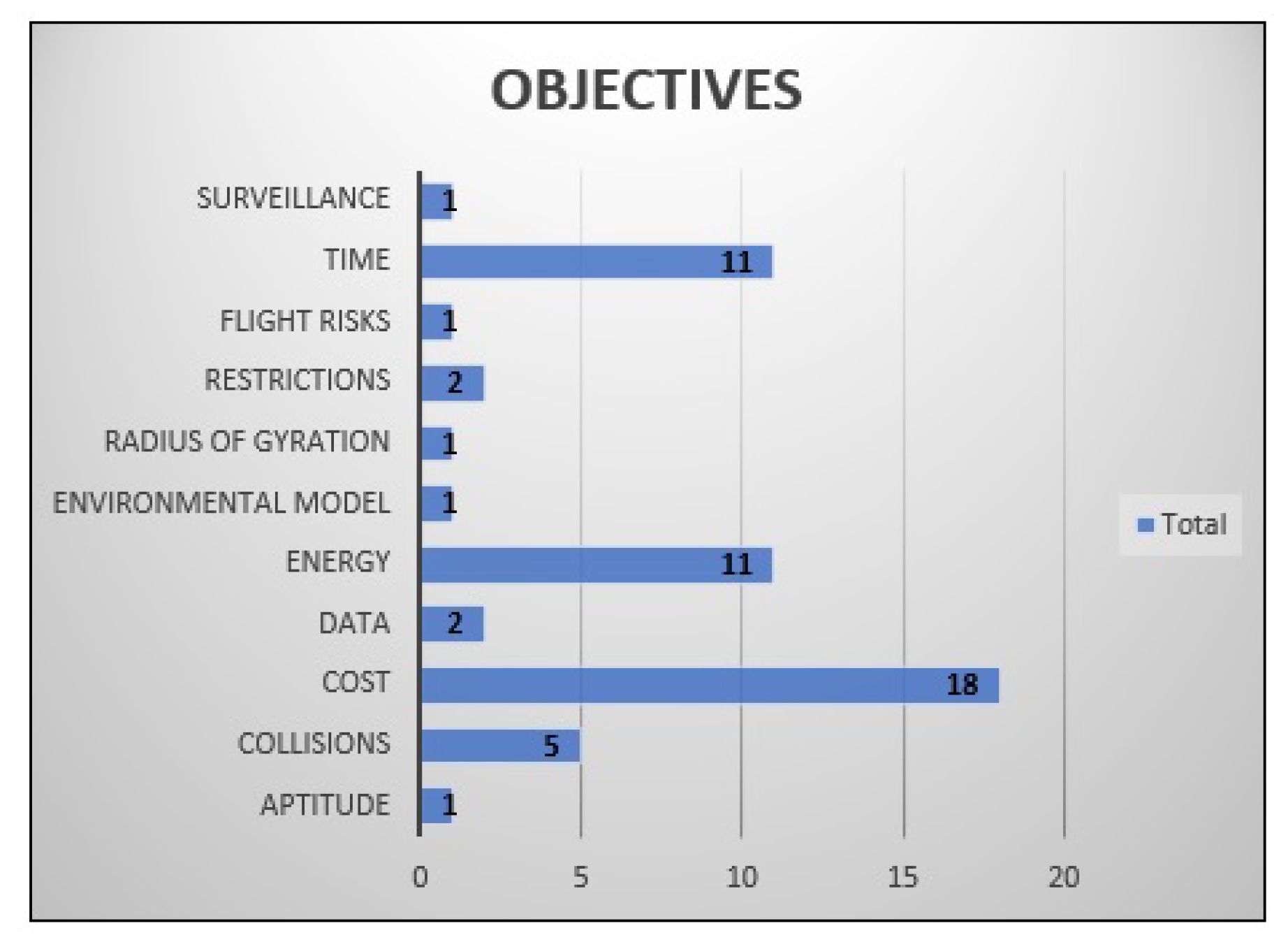
Figure 12 shows a graph of the objectives to be optimized vs. the number of articles analyzed. If the number of papers for each objective exceeds the value of contributions is because, in the researched papers, more than one of them has considered several objectives within the same investigation. Figure 12 also shows that the researchers focus on minimizing cost (33.3%), energy (20.37%), and time (20.37%). Among 18 out of the 37 items, the priority was to minimize the cost. These included the computational cost, threat cost, software, and hardware cost, etc.
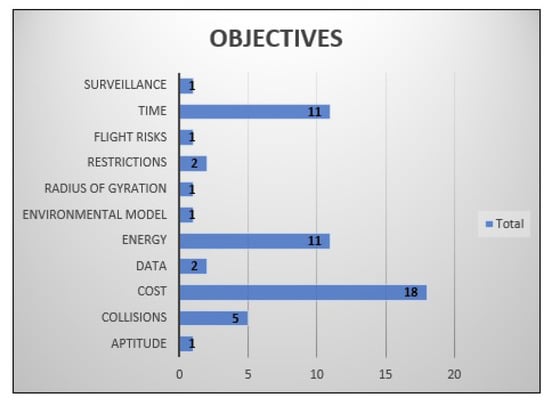
Figure 12.
Optimization objective functions vs. analyzed papers.
Table 5 presents the objective functions of the 37 papers analyzed. Table 5 shows that 37.84% (14) of papers present several objective functions, such as shown in contribution A-18 in which the cost (where the minimum safety distance and maximum communication distance between UAVs are considered), environmental model (the topography of the land is a model), and the flight altitude restrictions are considered. In the same way, in articles A-29 and A-37, there are three objectives to be optimized. The articles A-03, A-04, A-05, A-10. A-15, A-20, A-23, A25, A-31, A-32, and A-33 have two objectives to be optimized. The rest of the items only have one objective function.
Table 5.
The objectives to be optimized in each of the contributions investigated.
Implementation Aspects of Path Planning
One of the aspects that researchers take into account for path planning is the number of UAVs. Table 6 shows two groups of UAVs that can be observed, the simple ones, with only one UAV used (17 papers) and multiple UAVs where more than one UAV is used for the mission.
Table 6.
Number of UAVs used for the formulation of the problem.
Another important aspect is the obstacles that the UAVs must avoid. Table 7 shows that most of the contributions do not consider obstacles or only focus on known obstacles such as buildings or trees, so 78.38% (29 articles) of the contributions conducted their research with static non-technical obstacles, and only 5.41% of the contributions researchers consider technical obstacles. For instance, paper A-12 developed path-planning techniques for light shows with UAVs. They required powerful computing units and onboard sensors, which are extremely expensive for a large-scale group of UAVs, becoming a technical hurdle for this research.
Table 7.
Types of obstacles that researchers consider for path planning.
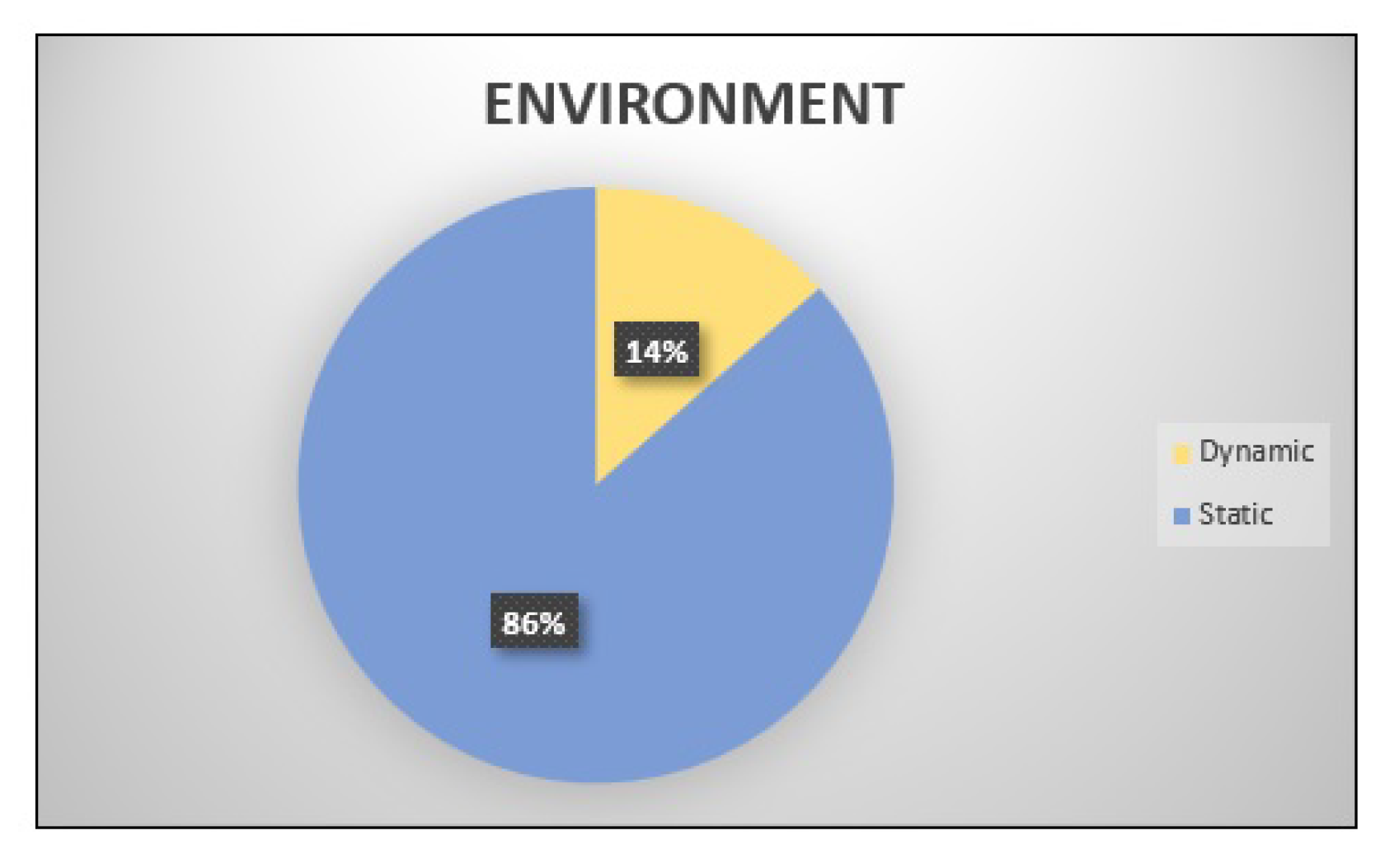
One of the most critical aspects that few researchers have considered is the environment, such as wind, snow, or rain, which can affect the flight of the UAVs, causing them to change their planned route and even causing the mission to fail. In contribution A-14, the researchers carry out 3D path planning based on radio maps for UAVs connected to cell phones. Here, the UAVs are connected to the BS to update their flight information and replan their route through algorithms based on predictive control. Figure 13 shows that the researchers have considered a hostile and uncertain environment only in 14% (A-02, A-14, A-15, A-26, and A-29) of the contributions.
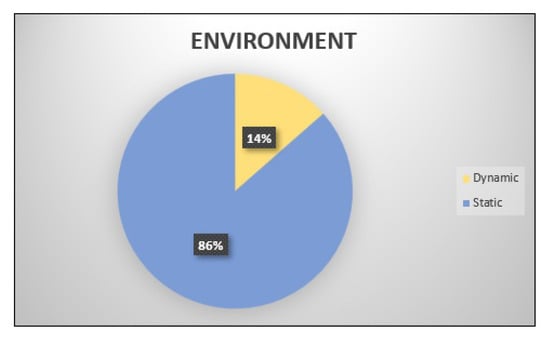
Figure 13.
Static or dynamic environments that have been considered in path planning.
4.2. RQ2—Are There Optimal Methods for Path Planning in 3D UAVs?
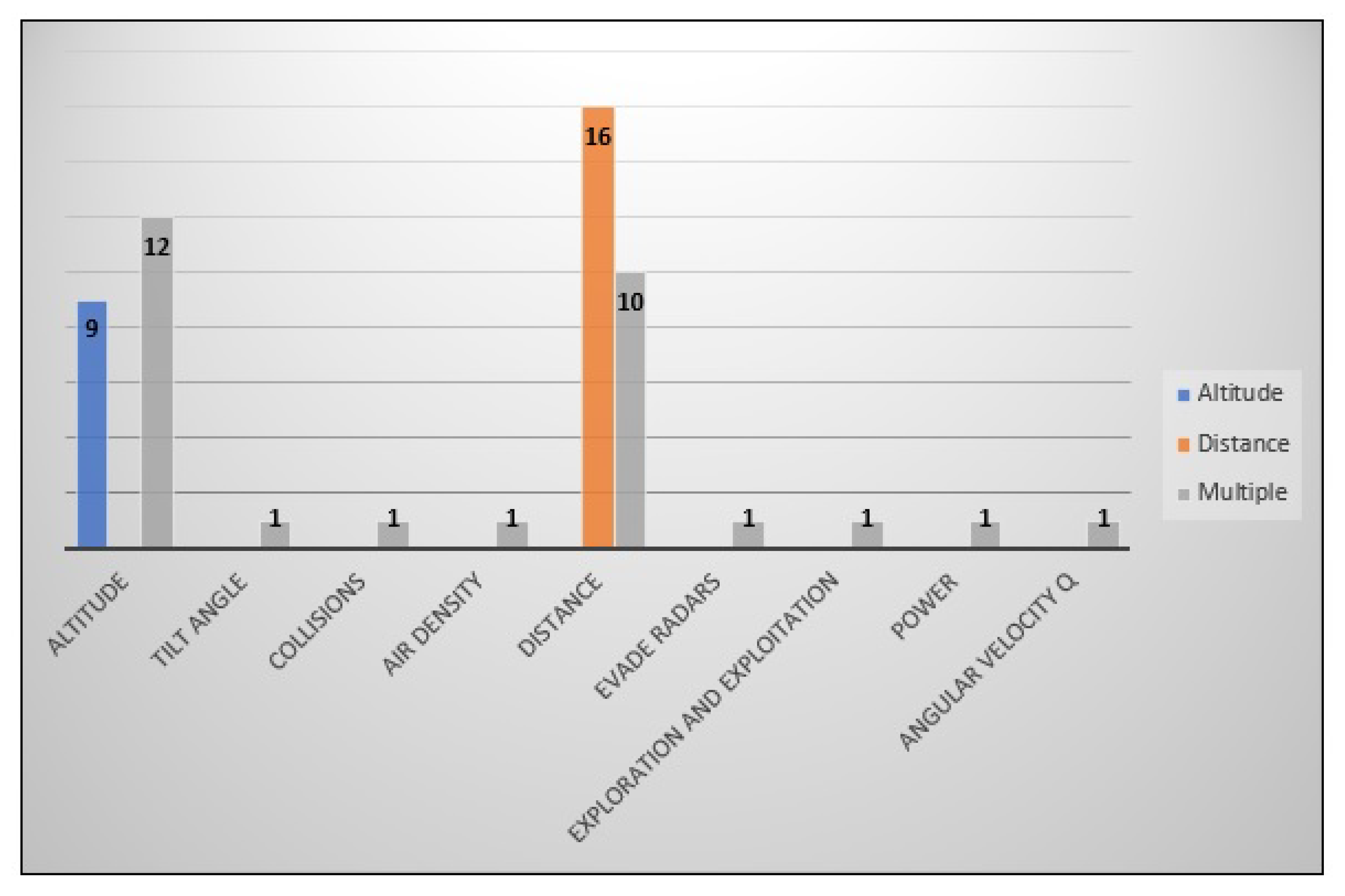
RQ2 seeks to provide data on the different variables to be optimized for path planning in 3D. Table 8 shows the variables that researchers have considered optimizing by applying different path-planning techniques. Among these are the flight altitude of the UAV, the inclination angle of the UAV to rise, collision avoidance of the UAV, air density where the UAV is going to fly, the distance between the starting point of the UAV and its target, evasion of radars in restricted places, exploration and exploitation of the best routes, power of the UAVs to fulfill the mission, constant angular velocity Q to lengthen the duration of its energy. Distance and altitude are the variables that the researchers most considered. Due to the complexity of 3D path planning, the altitude is constantly changing, which causes the UAV to have to change its speed and direction frequently. In this regard, Table 9 also shows the optimization variables related to each contribution analyzed. This table shows that, of the 37 contributions analyzed, 32.43% (12) of the papers have multiple variables to be optimized. For instance, in paper A-11, the researchers optimize altitude, collisions, distance, radar evasion, and power. Instead, in paper A-17, the researchers optimize the altitude and the angle of inclination for the elevation of the UAV. In papers A-02, A-03, A-05, A-07, A-08, A-16, A-18, A-25, and A-26, there are two variables to optimize, of which the altitude of UAV flight is the dominant one. The rest of the articles only have one variable to optimize.
Table 8.
Variables that the researchers optimized in their investigations.
Table 9.
Optimization variables of each contributions analyzed.
Figure 14 shows the papers vs. the variables to be optimized, where the lead-colored bars indicate the number of articles that have worked with multiple variables.
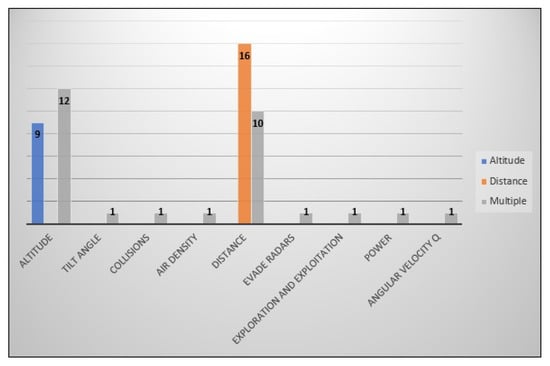
Figure 14.
Variables to optimize in the analyzed articles. The optimized multiple variables are observed in lead color, and the predominant variables in blue and orange.
4.3. RQ3—Are There Approximate Methods for Path Planning in 3D UAVs?
RQ3 seeks to provide information on the approximate methods mainly addressed for path planning in 3D UAVs. To answer this question, the results obtained in this research are presented below.
Table 10 presents the classification of the algorithms, in which 29 out of the 37 contributions analyzed, the researchers use the method of bio-inspired algorithms, such as the PSO. However, the researchers note that using this algorithm for a global optimal solution can take a long time (A-14).
Table 10.
Types of heuristic algorithms used in path planning.
The 18.9% (A-17, A-19, A-24, A-27, A-30, A-31, and A-34) of the papers analyzed use methods based on sampling. Multi-target exploration and path planning for unknown and unstructured environments are performed using the RRT algorithm, specifically designed for use in 3D exploration missions (A-19).
The node-based method is used by 21.62% of the contributions (A-01, A-04, A-16, A-17, A-22, A-34, A-35, and A-36). One of the algorithms implemented is the Layered Essential Visibility Graphic (LEVG) method for smooth path planning for fixed-wing UAVs in 3D environments through an efficient branching algorithm to reduce the computational time (A-35).
Table 11 shows the algorithms used in the 37 contributions analyzed. Likewise, Table 12 summarizes the information extracted from the contributions in this systematic mapping study. The researchers have employed diverse heuristic algorithms to address UAV-enabled communications systems’ 3D path planning problem. The algorithms are classified into four categories based on their characteristics: Sampling-based, Node-based, Bioinspired, and Others. Among the algorithms, A* and Dijkstra’s algorithms are commonly used in path planning and are categorized as node-based. They are well-known and widely adopted due to their effectiveness in finding optimal paths. The Heuristic algorithms section includes various optimization techniques such as Particle Swarm Optimization (PSO), Ant Colony Optimization (ACO), Genetic Algorithm (GA), and Gray Wolf Optimizer (GWO). These bioinspired algorithms have been adapted and utilized in 3D path planning to optimize objectives like energy consumption, cost, time, and collisions. Additionally, some algorithms incorporate specific techniques to address challenges in UAV communications systems. For instance, the Energy Efficiency A* (EEA*) algorithm focuses on energy optimization, while the Convex Model Predictive Control (MPC) algorithm considers dynamic obstacles. The algorithms demonstrate the efforts of researchers to adapt and develop innovative solutions for UAV 3D path planning, catering to various optimization objectives and environmental conditions. While some algorithms are based on well-established optimization techniques, others introduce novel adaptations and combinations to tackle specific challenges.
Table 11.
Heuristic algorithms used by researchers in 3D path planning. AC = Algorithm classification, 1 = Based on Sampling, 2 = Based on Node, 3 = Bioinspired and 4 = Others.
Table 12.
Summary of the systematic study carried out with the 37 papers.
5. Discussion
This section focuses on the trends and research gaps related to 3D path planning in UAV-enabled communications systems. One notable research gap we identified is the lack of consideration for multiple UAVs in most analyzed articles. While UAV networks have the potential to enhance coverage and communication capabilities, most studies focused on single UAV scenarios. It highlights the need for further research to explore the challenges and opportunities of path-planning algorithms for multiple UAVs, including coordination and collision avoidance. By addressing these aspects, the efficiency and effectiveness of UAV-enabled communications systems can be significantly improved.
Another research gap is the limited attention given to dynamic obstacles. Many analyzed papers either ignored dynamic obstacles altogether or only considered static obstacles. However, real-world scenarios often involve dynamic elements like other UAVs from different networks. Incorporating the ability to perceive and respond to dynamic obstacles is crucial for safe and reliable UAV operations. Future research should emphasize the development of path-planning algorithms that can dynamically detect and avoid static and dynamic obstacles, enhancing the robustness and adaptability of UAV-enabled communications systems.
In terms of objectives to be optimized, the trends among researchers primarily focused on minimizing time, cost, and energy. Time optimization is essential for efficient UAV operations, ensuring timely delivery of communication services or completing missions within specified timeframes. Cost optimization considers computational, hardware, and overall mission costs to achieve cost-effective solutions. Energy optimization is paramount as it directly impacts UAVs’ endurance and operational range. By minimizing energy consumption, UAVs can prolong flight duration and provide extended communication coverage.
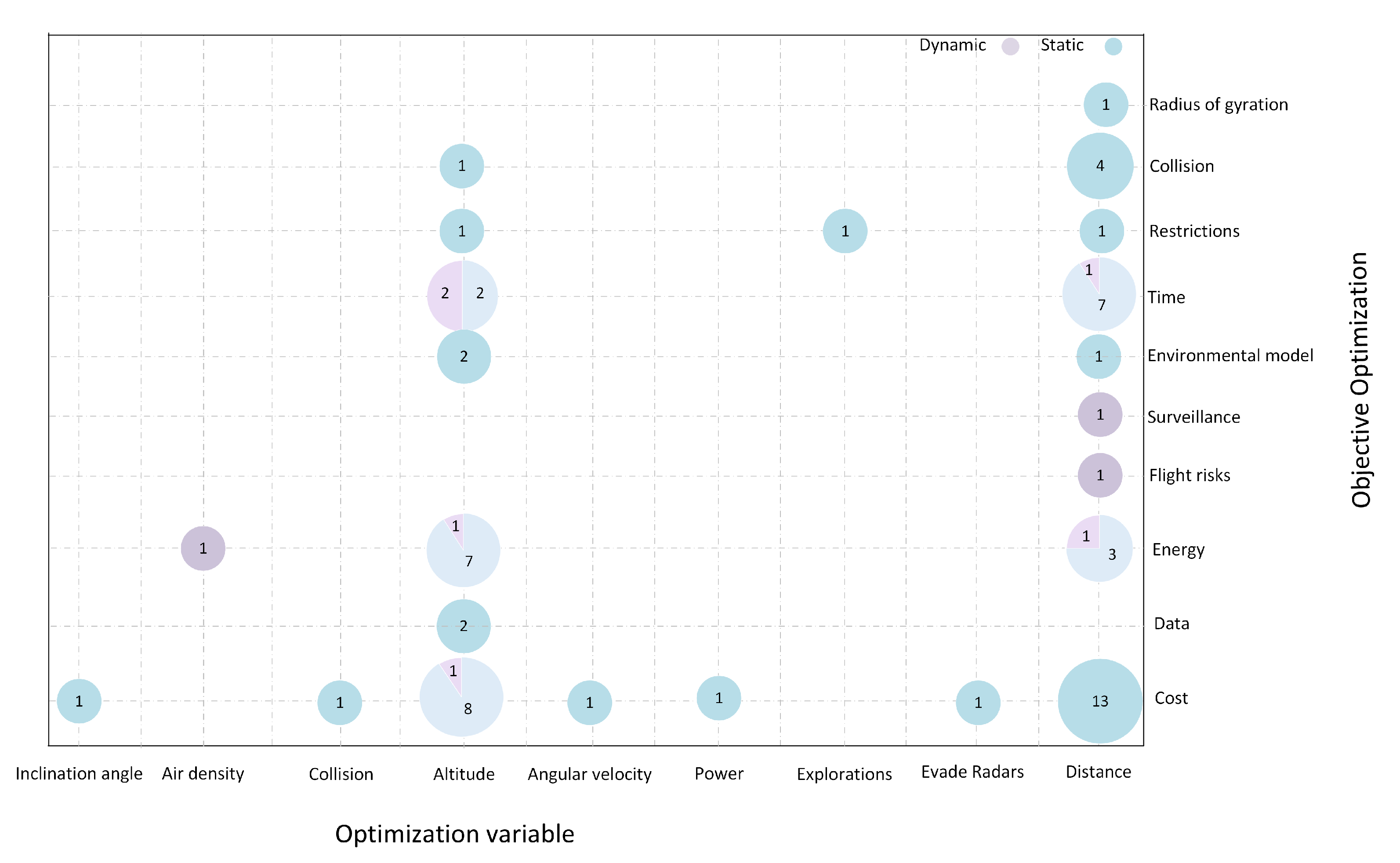
Furthermore, the trends among researchers regarding the variables to be optimized highlighted minimizing altitude and distance. These objectives align with the need for UAVs to operate efficiently, conserve energy, and optimize communication coverage. Minimizing altitude helps reduce power consumption and enhances flight stability while minimizing distance allows for shorter communication links and faster data transmission. However, it is worth noting that specific objectives related to in-flight communications, such as data rate, outage probability, and power transmission, have not been thoroughly analyzed in the context of path planning, as shown in Figure 15. Future research could explore these objectives’ optimization potential and impact on overall communication system performance.
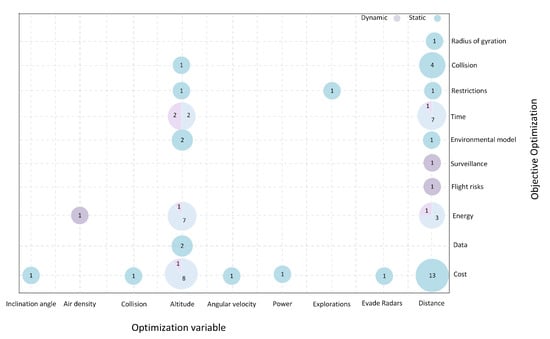
Figure 15.
Objective to be Min-max optimized vs. Optimization Variable.
6. Open Issues and Research Challenges
This section addresses open questions and research challenges that inspire further exploration in this emerging field. We delve into questions regarding the objectives to maximize and the system parameters utilized in its formulation.
6.1. Objective to Be Optimized
The main objective to be optimized focus on path planning is the coverage, avoiding collision, and energy consumption, but only a few consider providing communication during the trip. Consequently, additional objectives are regarded to facilitate communication during UAV flights. The Outage Probability ensures reliable and uninterrupted communication services in UAV networks, especially in challenging and dynamic environments. Optimizing throughput is essential to maximize the data rate and network efficiency. Delay Among terminal devices minimizing the communications delay is vital to enhance the scalability in UAV-enable communication systems, and quality of service ensures the power signal to decode the information.
6.2. Parameters Involved in System Formulation
The parameters commonly employed in system formulation encompass the number of UAVs, obstacles, and the environment. However, to enable communication capabilities, it becomes crucial to include additional parameters like Channel Models, which incorporate path loss and fading models within the communication system is vital. Understanding these models is essential for determining the required transmission power to transmit information effectively. Additionally, The access technique utilized in UAV networks to communicate with users is another critical parameter. It aids resource allocation and becomes especially significant in scenarios involving multiple UAVs, where interference analysis between UAVs is necessary. The application of this UAV network communication type comes into play when UAVs gather data from IoT devices.
7. Conclusions
This paper systematically mapped out 3D path planning algorithms in UAV-enabled communications systems. UAVs with communication technologies are promising wireless connectivity solutions in remote and disaster-stricken areas. However, integrating UAVs into real scenarios requires diverse technologies and algorithms, with 3D path planning algorithms crucial in determining optimal obstacle-free paths.
Through analyzing 37 articles from the Scopus database, we provided an overview of UAV-enabled communications systems, examined objectives to be minimized or maximized, investigated optimization variables, and explored algorithmic strategies for solving the 3D path planning problem. Unlike existing literature focusing on 2D environments, our study specifically addressed 3D path planning solutions, filling a critical research gap and offering insights into recent advancements.
The study highlights the need for further research and development in several critical areas of 3D path planning algorithms in UAV-enabled communications systems. These include the consideration of multiple UAVs to enhance network coverage, incorporating dynamic obstacle avoidance capabilities, and exploring multi-objective optimization approaches beyond altitude and distance minimization. Addressing these challenges can advance UAV-enabled communications systems’ efficiency, reliability, and effectiveness, unlocking their full potential for wireless connectivity in challenging environments and contributing to various application domains, including disaster response, remote areas, and beyond.
Author Contributions
Conceptualization, J.C.-R., M.M. and C.T.; methodology, J.C.-R., M.M. and C.T.; software, J.C.-R. and M.M.; validation, J.C.-R., M.M. and C.T.; formal analysis, J.C.-R., M.M. and C.T.; investigation, J.C.-R., M.M. and C.T.; resources, J.C.-R., M.M. and C.T.; data curation, J.C.-R. and M.M.; writing—original draft preparation, J.C.-R., M.M. and C.T.; writing—review and editing, J.C.-R., M.M. and C.T.; visualization, J.C.-R., M.M. and C.T.; supervision, J.C.-R., M.M. and C.T.; project administration, J.C.-R., M.M. and C.T.; funding acquisition, J.C.-R., M.M. and C.T. All authors have read and agreed to the published version of the manuscript.
Funding
Escuela Politécnica Nacional has supported this work in the project PIS-22-09.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not Applicable, the study does not report any data.
Acknowledgments
Jorge Carvajal-Rodriguez acknowledges the support provided by the Escuela Politécnica Nacional for his doctoral studies.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Shahid, N.; Abrar, M.; Ajmal, U.; Masroor, R.; Amjad, S.; Jeelani, M. Path planning in unmanned aerial vehicles: An optimistic overview. Int. J. Commun. Syst. 2022, 35, e5090. [Google Scholar] [CrossRef]
- Elmokadem, T.; Savkin, A.V. Towards fully autonomous UAVs: A survey. Sensors 2021, 21, 6223. [Google Scholar] [CrossRef]
- Yuan, Z.; Yang, Y.; Wang, D.; Ma, X. Energy-Efficient Trajectory Optimization for UAV-Enabled Cellular Communications Based on Physical-Layer Security. Aerospace 2022, 9, 50. [Google Scholar] [CrossRef]
- Arafat, M.Y.; Alam, M.M.; Moh, S. Vision-Based Navigation Techniques for Unmanned Aerial Vehicles: Review and Challenges. Drones 2023, 7, 89. [Google Scholar] [CrossRef]
- Cabreira, T.M.; Brisolara, L.B.; Ferreira, P.R., Jr. Survey on Coverage Path Planning with Unmanned Aerial Vehicles. Drones 2019, 3, 4. [Google Scholar] [CrossRef]
- Maboudi, M.; Homaei, M.; Song, S.; Malihi, S.; Saadatseresht, M.; Gerke, M. A Review on Viewpoints and Path Planning for UAV-Based 3-D Reconstruction. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2023, 16, 5026–5048. [Google Scholar] [CrossRef]
- Nagasawa, R.; Mas, E.; Moya, L.; Koshimura, S. Model-based analysis of multi-UAV path planning for surveying postdisaster building damage. Sci. Rep. 2021, 11, 18588. [Google Scholar] [CrossRef]
- Poudel, S.; Arafat, M.Y.; Moh, S. Bio-Inspired Optimization-Based Path Planning Algorithms in Unmanned Aerial Vehicles: A Survey. Sensors 2023, 23, 3051. [Google Scholar] [CrossRef]
- Song, B.; Qi, G.; Xu, L. A Survey of Three-Dimensional Flight Path Planning for Unmanned Aerial Vehicle. In Proceedings of the 2019 Chinese Control And Decision Conference (CCDC), Nanchang, China, 3–5 June 2019; pp. 5010–5015, ISSN 1948-9447. [Google Scholar] [CrossRef]
- Zhao, Y.; Zheng, Z.; Liu, Y. Survey on computational-intelligence-based UAV path planning. Knowl.-Based Syst. 2018, 158, 54–64. [Google Scholar] [CrossRef]
- Ait Saadi, A.; Soukane, A.; Meraihi, Y.; Benmessaoud Gabis, A.; Mirjalili, S.; Ramdane-Cherif, A. UAV Path Planning Using Optimization Approaches: A Survey. Arch. Comput. Methods Eng. 2022, 29, 4233–4284. [Google Scholar] [CrossRef]
- Goerzen, C.; Kong, Z.; Mettler, B. A Survey of Motion Planning Algorithms from the Perspective of Autonomous UAV Guidance. J. Intell. Robot. Syst. 2010, 57, 65–100. [Google Scholar] [CrossRef]
- Souissi, O.; Benatitallah, R.; Duvivier, D.; Artiba, A.; Belanger, N.; Feyzeau, P. Path planning: A 2013 survey. In Proceedings of the 2013 International Conference on Industrial Engineering and Systems Management (IESM), Rabat, Morocco, 28–30 October 2013; pp. 1–8. [Google Scholar]
- Yang, L.; Qi, J.; Xiao, J.; Yong, X. A literature review of UAV 3D path planning. In Proceedings of the 11th World Congress on Intelligent Control and Automation, Shenyang, China, 29 June–4 July 2014; pp. 2376–2381. [Google Scholar] [CrossRef]
- Aggarwal, S.; Kumar, N. Path planning techniques for unmanned aerial vehicles: A review, solutions, and challenges. Comput. Commun. 2020, 149, 270–299. [Google Scholar] [CrossRef]
- Jasim, M.M.; Al-Qaysi, H.K.; Allbadi, Y.; Al-Azzawi, H.M. Comprehensive study on unmanned aerial vehicles (UAVs). Adv. Math. Model. Appl. 2020, 5, 240–259. [Google Scholar]
- Tipantuña, C.; Hesselbach, X.; Sánchez-Aguero, V.; Valera, F.; Vidal, I.; Nogales, B. An NFV-based energy scheduling algorithm for a 5G enabled fleet of programmable unmanned aerial vehicles. Wirel. Commun. Mob. Comput. 2019, 2019, 4734821. [Google Scholar] [CrossRef]
- Vashisth, A.; Batth, R.S.; Ward, R. Existing path planning techniques in unmanned aerial vehicles (UAVs): A systematic review. In Proceedings of the 2021 International Conference on Computational Intelligence and Knowledge Economy (ICCIKE), Dubai, United Arab Emirates, 17–18 March 2021; pp. 366–372. [Google Scholar]
- Yu, Z.; Sun, F.; Lu, X.; Song, Y. Overview of research on 3d path planning methods for rotor uav. In Proceedings of the 2021 International Conference on Electronics, Circuits and Information Engineering (ECIE), Zhengzhou, China, 22–24 January 2021; pp. 368–371. [Google Scholar]
- Acosta, J.F.; Andaluz, V.H.; Naranjo, M.X.; Molina, J.I.; Santana, A.; Topa, A.O.; Erazo, G. 3-D Path Planning Using Subatomic Particles and Feynman Diagrams. In Proceedings of the 2019 Third World Conference on Smart Trends in Systems Security and Sustainablity (WorldS4), London, UK, 30–31 July 2019; pp. 368–375. [Google Scholar]
- Flores-Caballero, G.; Rodríguez-Molina, A.; Aldape-Pérez, M.; Villarreal-Cervantes, M.G. Optimized path-planning in continuous spaces for unmanned aerial vehicles using meta-heuristics. IEEE Access 2020, 8, 176774–176788. [Google Scholar] [CrossRef]
- Aiello, G.; Valavanis, K.P.; Rizzo, A. Fixed-Wing UAV energy efficient 3D path planning in cluttered environments. J. Intell. Robot. Syst. 2022, 105, 60. [Google Scholar] [CrossRef]
- Kohl, C.; McIntosh, E.J.; Unger, S.; Haddaway, N.R.; Kecke, S.; Schiemann, J.; Wilhelm, R. Online tools supporting the conduct and reporting of systematic reviews and systematic maps: A case study on CADIMA and review of existing tools. Environ. Evid. 2018, 7, 1–17. [Google Scholar]
- Del Alamo, J.M.; Guaman, D.S.; García, B.; Diez, A. A systematic mapping study on automated analysis of privacy policies. Computing 2022, 104, 2053–2076. [Google Scholar] [CrossRef]
- López-Carreño, Rosana Fuentes de Información: Guía básica y Nueva Clasificación. Fuentes de Información <ES, March 2018; Volume 21. ISSN 1697-7904. Available online: https://revistas.um.es/analesdoc/article/view/323821 (accessed on 1 June 2023).
- Mariño, P.P. Optimization of Computer Networks: Modeling and Algorithms: A Hands-On Approach; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- Du, N.; Zhou, Y.; Deng, W.; Luo, Q. Improved chimp optimization algorithm for three-dimensional path planning problem. Multimed. Tools Appl. 2022, 81, 27397–27422. [Google Scholar] [CrossRef]
- Lv, J.X.; Yan, L.J.; Chu, S.C.; Cai, Z.M.; Pan, J.S.; He, X.K.; Xue, J.K. A new hybrid algorithm based on golden eagle optimizer and grey wolf optimizer for 3D path planning of multiple UAVs in power inspection. Neural Comput. Appl. 2022, 34, 11911–11936. [Google Scholar] [CrossRef]
- Farid, G.; Cocuzza, S.; Younas, T.; Razzaqi, A.A.; Wattoo, W.A.; Cannella, F.; Mo, H. Modified A-Star (A*) Approach to Plan the Motion of a Quadrotor UAV in Three-Dimensional Obstacle-Cluttered Environment. Appl. Sci. 2022, 12, 5791. [Google Scholar] [CrossRef]
- Zhou, Q.; Gao, S.; Qu, B.; Gao, X.; Zhong, Y. Crossover recombination-based global-best brain storm optimization algorithm for uav path planning. Proc. Rom. Acad. Ser.-Math. Phys. Tech. Sci. Inf. Sci. 2022, 23, 207–216. [Google Scholar]
- Jiang, W.; Lyu, Y.; Li, Y.; Guo, Y.; Zhang, W. UAV path planning and collision avoidance in 3D environments based on POMPD and improved grey wolf optimizer. Aerosp. Sci. Technol. 2022, 121, 107314. [Google Scholar] [CrossRef]
- Ahn, H.; Park, J.; Bang, H.; Kim, Y. Model Predictive Control-Based Multirotor Three-Dimensional Motion Planning with Point Cloud Obstacle. J. Aerosp. Inf. Syst. 2022, 19, 179–193. [Google Scholar] [CrossRef]
- Xiangyu, W.; Yanping, Y.; Dong, W.; Zhang, Z. Mission-oriented cooperative 3D path planning for modular solar-powered aircraft with energy optimization. Chin. J. Aeronaut. 2022, 35, 98–109. [Google Scholar]
- Xia, S.; Zhang, X. Constrained path planning for unmanned aerial vehicle in 3D terrain using modified multi-objective particle swarm optimization. Actuators 2021, 10, 255. [Google Scholar] [CrossRef]
- Jamshidi, V.; Nekoukar, V.; Refan, M.H. Real time UAV path planning by parallel grey wolf optimization with align coefficient on CAN bus. Clust. Comput. 2021, 24, 2495–2509. [Google Scholar] [CrossRef]
- Huang, J.; Tian, G.; Zhang, J.; Chen, Y. On Unmanned Aerial Vehicles Light Show Systems: Algorithms, Software and Hardware. Appl. Sci. 2021, 11, 7687. [Google Scholar] [CrossRef]
- Chen, J.; Mitra, U.; Gesbert, D. 3D urban UAV relay placement: Linear complexity algorithm and analysis. IEEE Trans. Wirel. Commun. 2021, 20, 5243–5257. [Google Scholar] [CrossRef]
- Chen, Y.; Li, W.; Qi, R. Research and Simulation of UAV Three-Dimensional Path Replanning in Complex Environment. In Proceedings of the 2021 IEEE Asia-Pacific Conference on Image Processing, Electronics and Computers (IPEC), Dalian, China, 14–16 April 2021; pp. 746–751. [Google Scholar]
- Ahmed, N.; Pawase, C.; Chang, K. Distributed 3-D Path Planning for Multi-UAVs with Full Area Surveillance Based on Particle Swarm Optimization. Appl. Sci. 2021, 8, 2021. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, R. Radio map-based 3D path planning for cellular-connected UAV. IEEE Trans. Wirel. Commun. 2020, 20, 1975–1989. [Google Scholar] [CrossRef]
- Ortiz, A.; Garcia-Nieto, S.; Simarro, R. Comparative study of optimal multivariable LQR and MPC controllers for unmanned combat air systems in trajectory tracking. Electronics 2021, 10, 331. [Google Scholar] [CrossRef]
- Xiao, J.; Sun, H.; Chai, X.; Qu, B.; Wen, P.; Zhou, Y.; Wang, H.; Wang, D. Multi-UAV 3D Path Planning Based on Improved Particle Swarm Optimizer. In Proceedings of the 2021 International Conference on Computer, Internet of Things and Control Engineering (CITCE), Guangzhou, China, 12–14 November 2021; pp. 144–149. [Google Scholar]
- Lindqvist, B.; Agha-Mohammadi, A.A.; Nikolakopoulos, G. Exploration-RRT: A multi-objective path planning and exploration framework for unknown and unstructured environments. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 3429–3435. [Google Scholar]
- Guo, J.; Liang, C.; Wang, K.; Sang, B.; Wu, Y. Three-dimensional autonomous obstacle avoidance algorithm for UAV based on circular arc trajectory. Int. J. Aerosp. Eng. 2021, 2021, 8819618. [Google Scholar] [CrossRef]
- Xue, Z.; Liu, X. Trajectory planning of unmanned aerial vehicle based on the improved biogeography-based optimization algorithm. Adv. Mech. Eng. 2021, 13, 16878140211004295. [Google Scholar] [CrossRef]
- Abhishek, B.; Ranjit, S.; Shankar, T.; Eappen, G.; Sivasankar, P.; Rajesh, A. Hybrid PSO-HSA and PSO-GA algorithm for 3D path planning in autonomous UAVs. SN Appl. Sci. 2020, 2, 1805. [Google Scholar] [CrossRef]
- Wu, C.; Huang, X.; Luo, Y.; Leng, S.; Wu, F. An Improved Sparse Hierarchical Lazy Theta Algorithm for UAV Real-Time Path Planning in Unknown Three-Dimensional Environment. In Proceedings of the 2020 IEEE 20th international conference on communication technology (ICCT), Nanning, China, 28–31 October 2020; pp. 673–677. [Google Scholar]
- Xiong, C.; Xin, B.; Guo, M.; Ding, Y.; Zhang, H. Multi-UAV 3D Path Planning in Simultaneous Attack. In Proceedings of the 2020 IEEE 16th International Conference on Control & Automation (ICCA), Hokkaido, Japan, 6–9 July 2020; pp. 500–505. [Google Scholar]
- Yang, Q.; Liu, J.; Li, L. Path planning of UAVs under dynamic environment based on a hierarchical recursive multiagent genetic algorithm. In Proceedings of the 2020 IEEE Congress on Evolutionary Computation (CEC), Glasgow, UK, 19–24 July 2020; pp. 1–8. [Google Scholar]
- Park, J.K.; Chung, T.M. Boundary-RRT* algorithm for drone collision avoidance and interleaved path re-planning. J. Inf. Process. Syst. 2020, 16, 1324–1342. [Google Scholar]
- Wang, X.; Yang, Y.; Wu, D.; Zhang, Z.; Ma, X. Mission-oriented 3D path planning for high-altitude long-endurance solar-powered UAVs with optimal energy management. IEEE Access 2020, 8, 227629–227641. [Google Scholar] [CrossRef]
- Teng, H.; Ahmad, I.; Msm, A.; Chang, K. 3D optimal surveillance trajectory planning for multiple UAVs by using particle swarm optimization with surveillance area priority. IEEE Access 2020, 8, 86316–86327. [Google Scholar] [CrossRef]
- Samaniego, F.; Sanchis, J.; Garcia-Nieto, S.; Simarro, R. Smooth 3D path planning by means of multiobjective optimization for fixed-wing UAVs. Electronics 2019, 9, 51. [Google Scholar] [CrossRef]
- Natalizio, E.; Zema, N.R.; Di Puglia Pugliese, L.; Guerriero, F. Download and fly: An online solution for the UAV 3D trajectory planning problem in smart cities. In Proceedings of the 9th ACM Symposium on Design and Analysis of Intelligent Vehicular Networks and Applications, New York, NY, USA, 25–29 November 2019; pp. 49–56. [Google Scholar]
- Qin, Z.; Dong, C.; Wang, H.; Li, A.; Dai, H.; Sun, W.; Xu, Z. Trajectory planning for data collection of energy-constrained heterogeneous UAVs. Sensors 2019, 19, 4884. [Google Scholar] [CrossRef]
- Dewangan, R.K.; Shukla, A.; Godfrey, W.W. Three dimensional path planning using Grey wolf optimizer for UAVs. Appl. Intell. 2019, 49, 2201–2217. [Google Scholar] [CrossRef]
- D’Amato, E.; Notaro, I.; Blasi, L.; Mattei, M. Smooth path planning for fixed-wing aircraft in 3d environment using a layered essential visibility graph. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 9–18. [Google Scholar]
- Taoudi, A.; Luo, C. Obstacle avoidance for a quadrotor using A* path planning and LQR-based trajectory tracking. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019; p. 1566. [Google Scholar]
- Bahabry, A.; Wan, X.; Ghazzai, H.; Menouar, H.; Vesonder, G.; Massoud, Y. Low-altitude navigation for multi-rotor drones in urban areas. IEEE Access 2019, 7, 87716–87731. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).