1. Introduction
Unmanned aerial vehicles (UAV) have played an important role in traffic monitoring, route inspection, military, forestry [
1,
2,
3,
4], and other fields in recent years. Pedestrian detection is becoming more and more important in applications such as intelligent monitoring, re-identification of people, and autonomous driving. Therefore, drones to detect pedestrians have become an emerging technology. Unlike ordinary target detection, pedestrian detection based on low-altitude drones can provide more comprehensive information and lay the foundation for an in-depth understanding and analysis of pedestrians. However, due to the special viewing angle of low-altitude drones and the low computing power of embedded devices, quickly and accurately detecting pedestrians is still a challenging problem.
Traditional target detection algorithms lack effective image feature representation methods. The model’s generalization ability is insufficient, and it is challenging to complete target detection through general abstract features [
5]. The target detection algorithm based on deep learning uses a convolutional neural network (CNN) to extract the target feature richly to complete target detection. Although the current target detection methods based on deep learning have achieved specific achievements, there are still significant challenges in pedestrian detection in unique low-altitude drone scenes. These challenges are mainly: (i) Due to the instability and randomness of the drone shooting camera, it will cause camera shake and aspect ratio changes, which will complicate the background and increase the difficulty of detection to a certain extent; (ii) for pedestrian detection, the drone will distort pedestrians and easily cause false detection when performing overhead shooting; (iii) the scale mismatch between the dataset in the pre-training weight used in the training process and the small target dataset will cause the loss of object feature representation, which will reduce the performance of the detector; (iv) the limited computing power of the drone’s airborne platform poses a more significant challenge to the complexity of the detection algorithm; and (v) the latency of high-precision target models is high, affecting how to balance detection accuracy and real-time performance.
In response to the above problems, this article proposes a new convolutional neural network structure SMYOLO.
Aiming at the problem of limited computing power on the drone’s airborne platform and high latency of high-precision target models, the SMYOLO target detection model is proposed. The conventional convolution is decomposed and replaced with deep separable convolution and dot convolution, and the activation function is replaced, so as to compress the YOLOv4 model and realize the deployment on the embedded platform.
Because of the reduced model accuracy after the compressed model and the problem of false pedestrian detection in pedestrian detection, the pre-training dataset and the training dataset are scaled to match, which will improve the feature representation ability of the detector during the training process. SMYOLO has added the BN layer to improve the generalization ability of the detector, thereby improving the accuracy of SMYOLO.
This algorithm reduces the model’s size while ensuring the computing power of the drone’s airborne platform, which is very important for the real-time detection of pedestrian scenes. The experimental results and analysis show that compared with the current mainstream methods, the method in this paper increases the detection speed while maintaining the detection accuracy and ensures the detection accuracy of the model while minimizing the volume of the network model as much as possible.
2. Related Work
2.1. Research on High-Precision Target Detection Algorithms
With the development of neural networks, target detection algorithms based on deep learning have made certain achievements. Representative algorithms are: RCNN(Region-based CNN) series (RCNN [
6], Fast RCNN [
7] and Faster RCNN [
8]), SSD (Single Shot MultiBox Detector) [
9] and YOLO (You Only Look Once) series (YOLO [
10], YOLOV2 [
11], YOLOV3 [
12], YOLOV4 [
13]). This is more research on pedestrian detection algorithms in ordinary scenes, but there are fewer pedestrian detection algorithms in drone scenes. Although pedestrians are detected in ordinary scenes and drone scenes, there are certain differences between pedestrians in the two scenes. For example, the pedestrian target in the drone scene is relatively small, which makes detection difficult. Liu [
14] improved the YOLOv3 network structure. By increasing the operation of the convolutional layer in the early stage to enrich the spatial information, the performance of small target detection was significantly improved. Yu [
15] proposed a scale matching method to keep the feature distribution of the network pre-training dataset and the detector dataset consistent and improve the quality of the small target detection model by improving the similarity of the data distribution. Shao [
16] used the k-means clustering algorithm to extract pedestrian areas, used RPN to generate recommended candidate areas quickly, and expanded the structure of Faster-RCNN through the method of high- and low-level feature fusion to improve the detection ability of small pedestrians.
2.2. Research on Lightweight Target Detection Algorithms
Embedded devices have relatively small computing capabilities. The deployment of a complete target detection model on embedded devices will lead to problems such as high energy consumption, high computational load, and high latency, making it hard to meet real-time performance. In this case, the demand for lightweight networks has grown. Wu [
17] pruned the trained model through the channel pruning algorithm of YOLOv4, simplifying the structure and parameters of the model under the premise of ensuring accuracy and realizing real-time detection. Yu [
18] used the focal loss to optimize the loss function to improve the accuracy and used a pruning algorithm to simplify the network to speed up the detection. Ẏan [
19] realized the deployment of the model on the embedded platform by replacing the activation function of YOLOv4 with the ELU activation function and adding the SE attention module to the backbone. Zhao [
20] proposed that based on YOLO-LITE as the backbone network, mixed YOLOv3-LITE supplements residual block (ResBlocks) and parallel high-to-low resolution subnetworks. ALFASLY [
21] proposed to adaptively zoomin the input frame by splitting it into nonoverlapped tiles and paying attention only to the important tiles. It has obtained a fully convolutional pedestrian detection model that can be run on low computational resources. Ke [
22] processed with a nonoverlapped image blocking data augmentation method, and then input them into the YOLOv3 detector to obtain the object position information. An LCNN-based pedestrian re-identification model is used to extract the features of the object.
2.3. High-Precision Target Detection Algorithm: YOLOv4
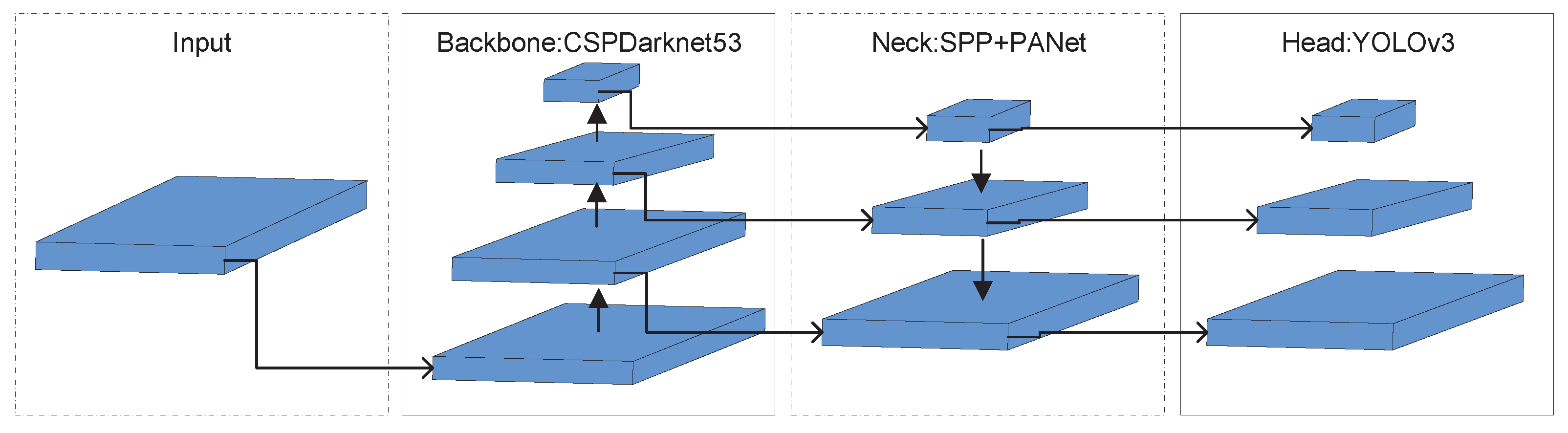
YOLOv4 is a first-level object detector, an improved target detection algorithm of YOLOv3. The architecture of YOLOv4 is CSPDarkNet53+SPP+PANET+YOLOv3, and the main structure is shown in
Figure 1. The head is the same as YOLOv3 and compared with YOLOv3, YOLOv4 introduces CSPNet, which changes its backbone structure to CSPDarkNET53, containing 29 convolutions. The receptive field is 725 × 725, and the parameter is 27.6 million. Compared with Darknet-53, this backbone structure uses the CSP module to first divide the feature map of the base layer into two parts and then merge through the cross-stage hierarchical structure to enhance the learning ability of the CNN and ensure accuracy while reducing the amount of calculation. In order to increase the receptive field, YOLOv4 uses PANet [
23] instead of FPN [
24] for the parameter aggregation to be suitable for target detection of different scales. It uses spatial pyramid pooling (SPP) [
25] as an additional module of Neck to perform multi-scale fusion and improve feature extraction capabilities. Finally, to train the network more efficiently on a single GPU, YOLOv4 uses data augmentation methods to mosaic and spontaneous training in the network and uses genetic algorithms to select the best hyperparameters. Through an analysis, the speed of the YOLOv4 algorithm can significantly meet the accuracy requirements of the pedestrian detection task, but due to the poor computing power of the embedded device, it cannot meet the real-time requirements. Therefore, this paper improves the YOLOv4 network to enable real-time pedestrian detection in the low-altitude UAV scene.
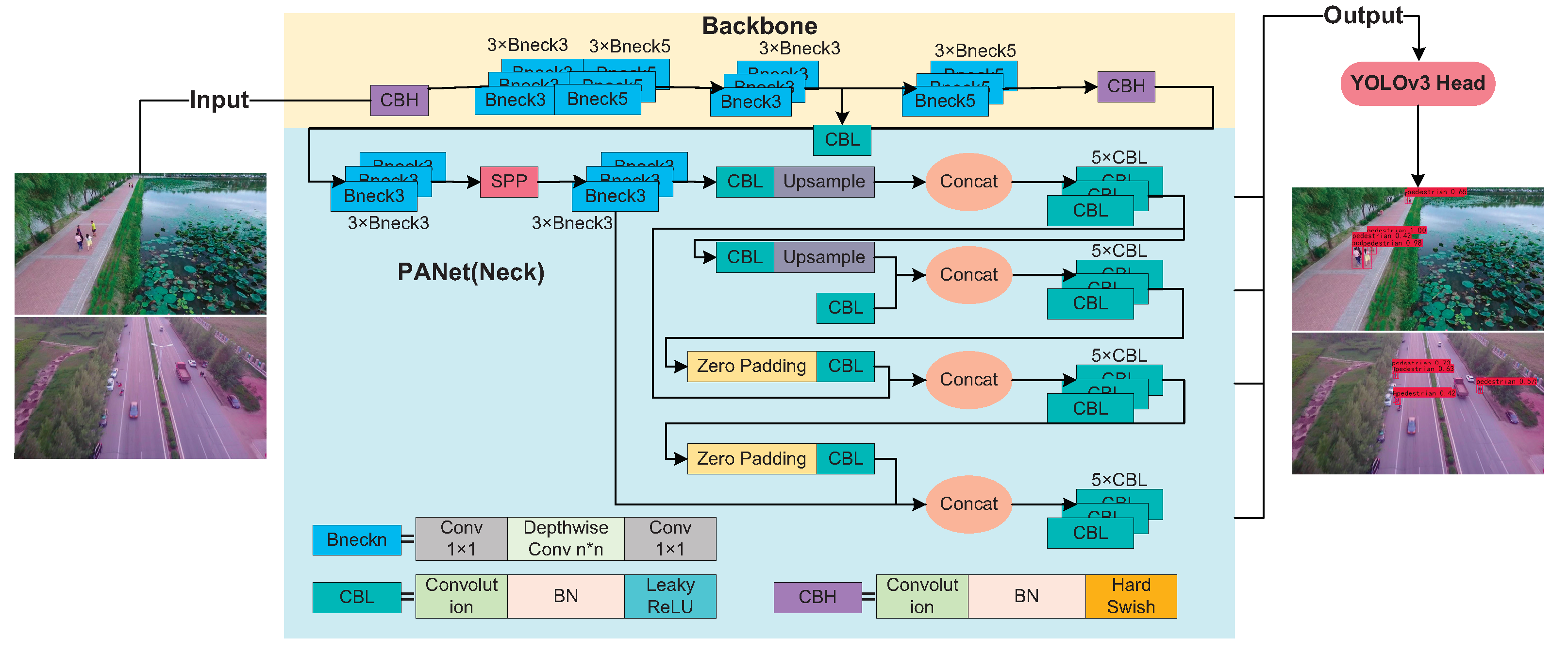
3. Proposed Method
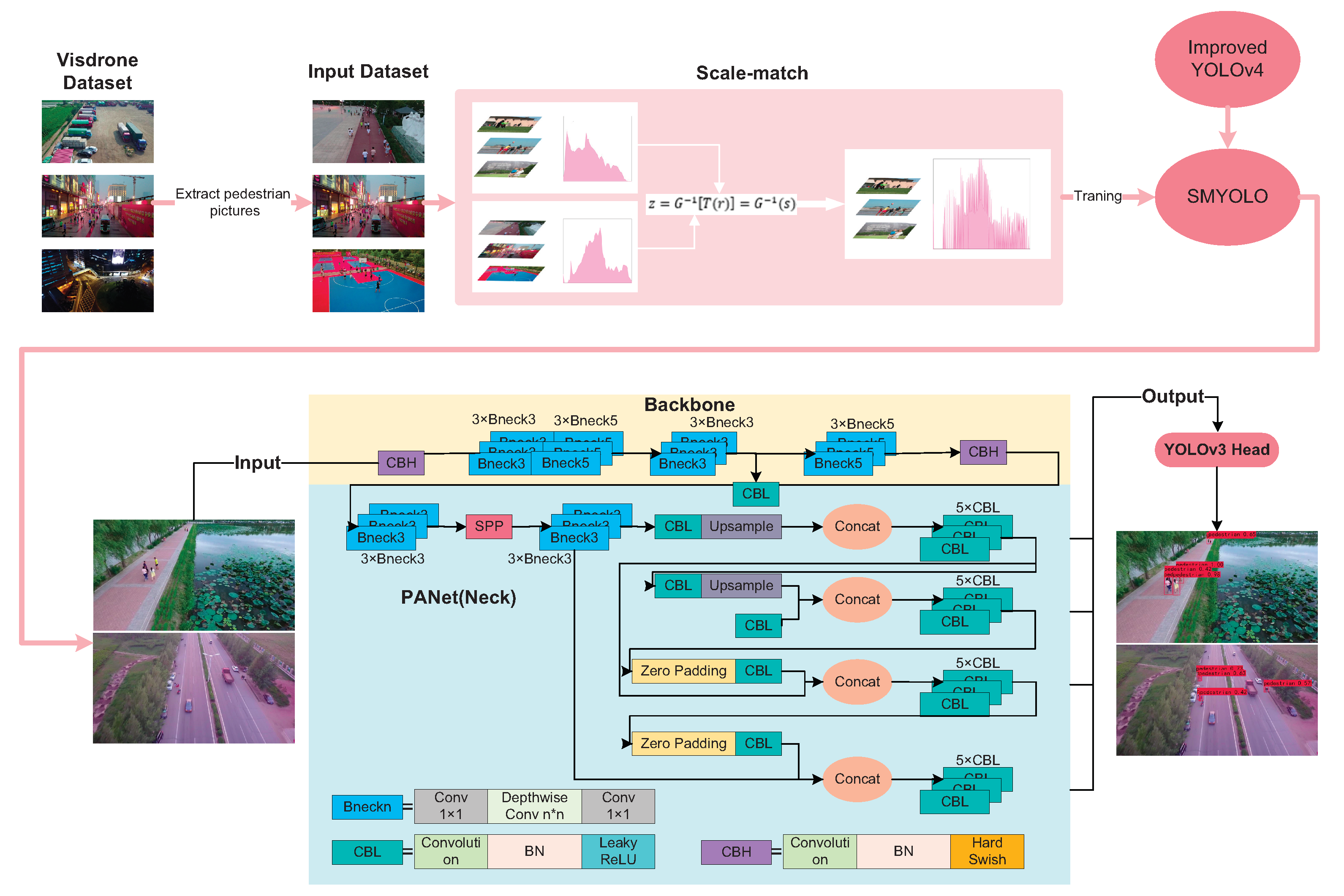
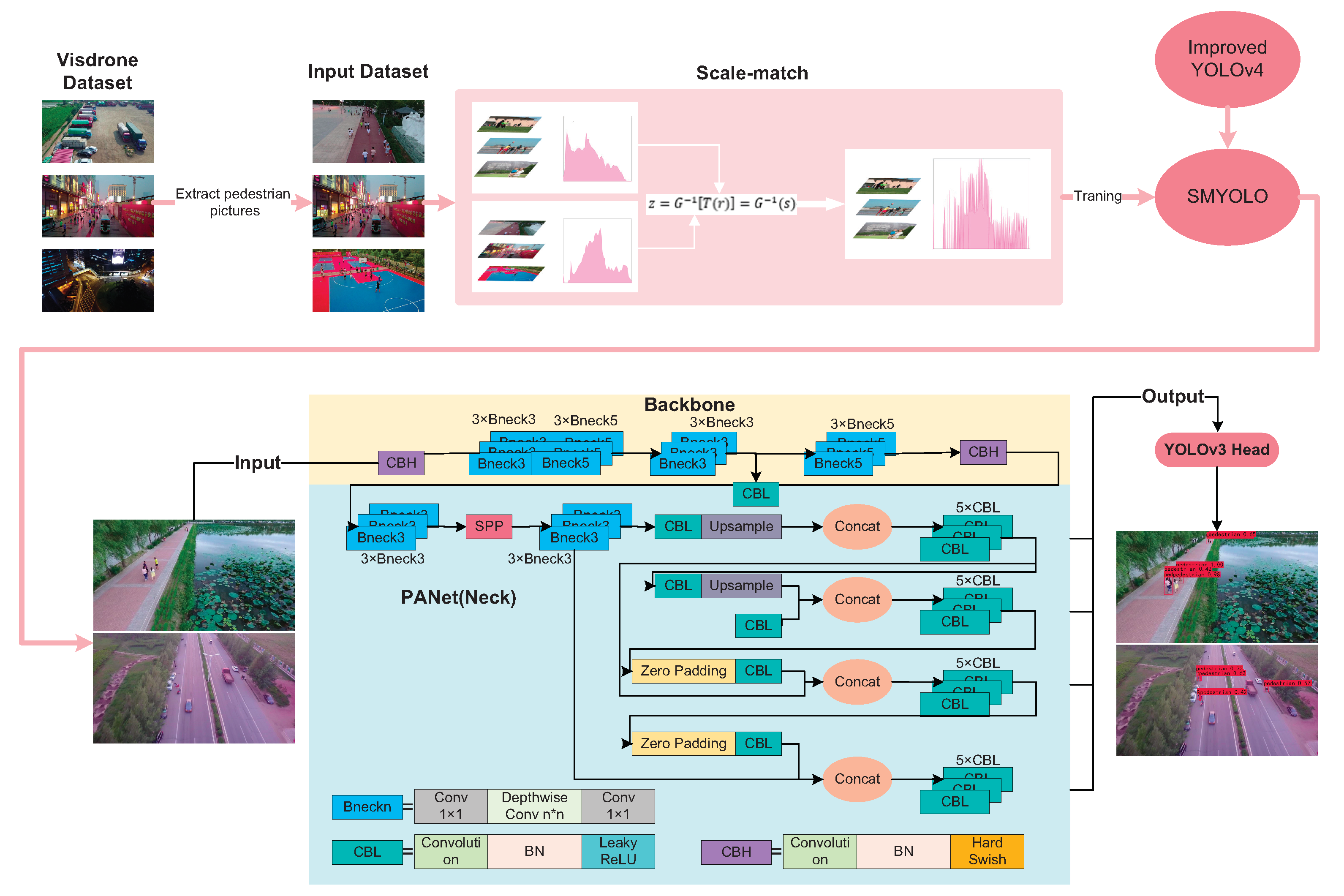
The flow of the low-altitude pedestrian detection algorithm proposed in this paper is shown in
Figure 2. First, by improving the YOLOv4 model, a new target detection model is proposed: SMYOLO. SMYOLO uses deep separable convolution to extract features and changes the activation function to a lightweight activation function, which will improve the computational efficiency of the convolutional network and reduce the number of parameters, thereby improving the detection speed of the convolutional network model, so that it can perform real-time detection on airborne equipment with less computing power. Secondly, SMYOLO extracts the pedestrian data in the VisDrone dataset to generate a pedestrian dataset, and use the method of scale matching to increase the feature representation ability of the detector to improve the detection accuracy of the SMYOLO convolutional network model to achieve the balance between SMYOLO’s accuracy and speed.
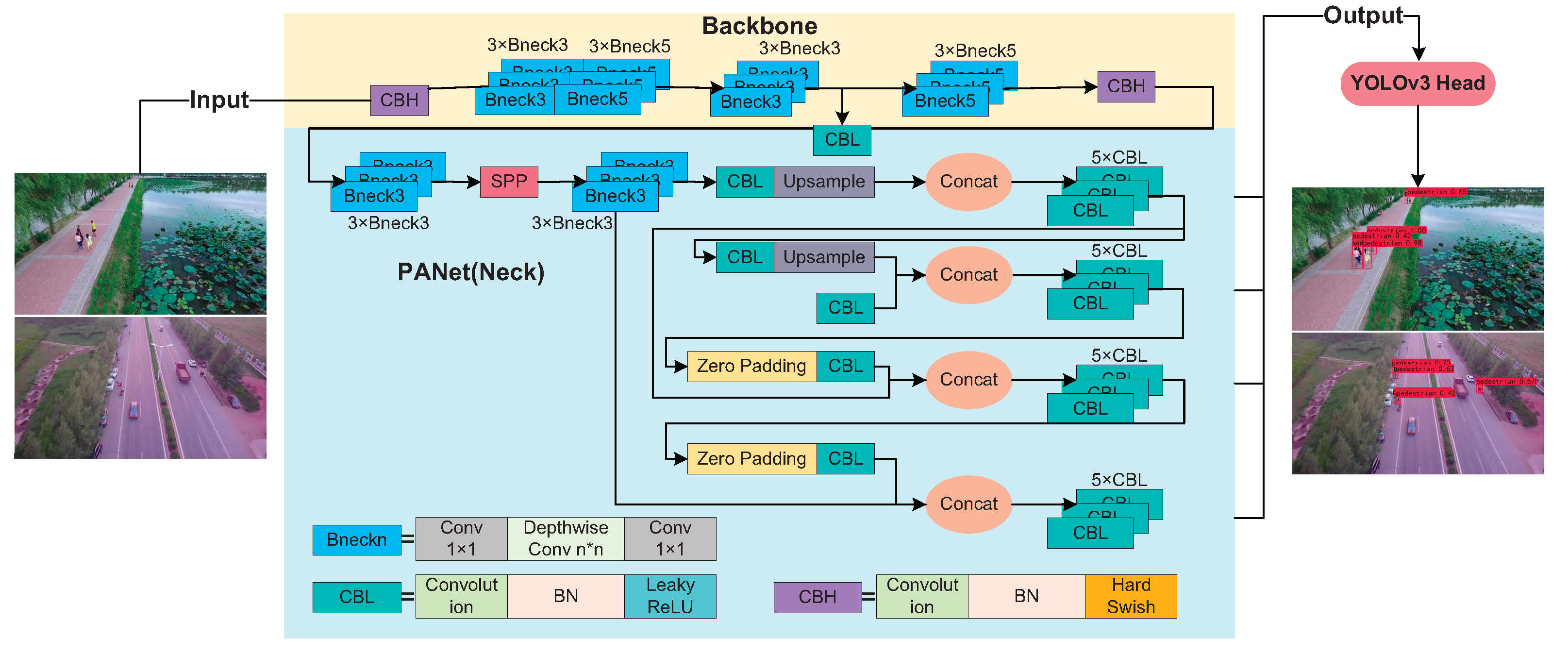
3.1. Low-Altitude Pedestrian Detection Network Architecture: SMYOLO
The ideal detector must achieve high accuracy in positioning and recognition and high efficiency in terms of time. In recent years, many practical target detection algorithms have been proposed, such as SSD and Fast R-CNN. This article selects the recently proposed CNN architecture YOLOv4. Compared with other networks, this network achieves an optimal balance of speed and accuracy. However, if it is directly deployed on embedded devices, it will lead to the overload of airborne drone equipment. Therefore, the SMYOLO network architecture is proposed. The proposed SMYOLO network follows the YOLO target detection idea, using the characteristics of the picture to predict each frame, that is, predicting all the frames of all categories at one time so that the end-to-end prediction can guarantee very high detection speed.
3.1.1. Depth Separable Convolution and Point Convolution
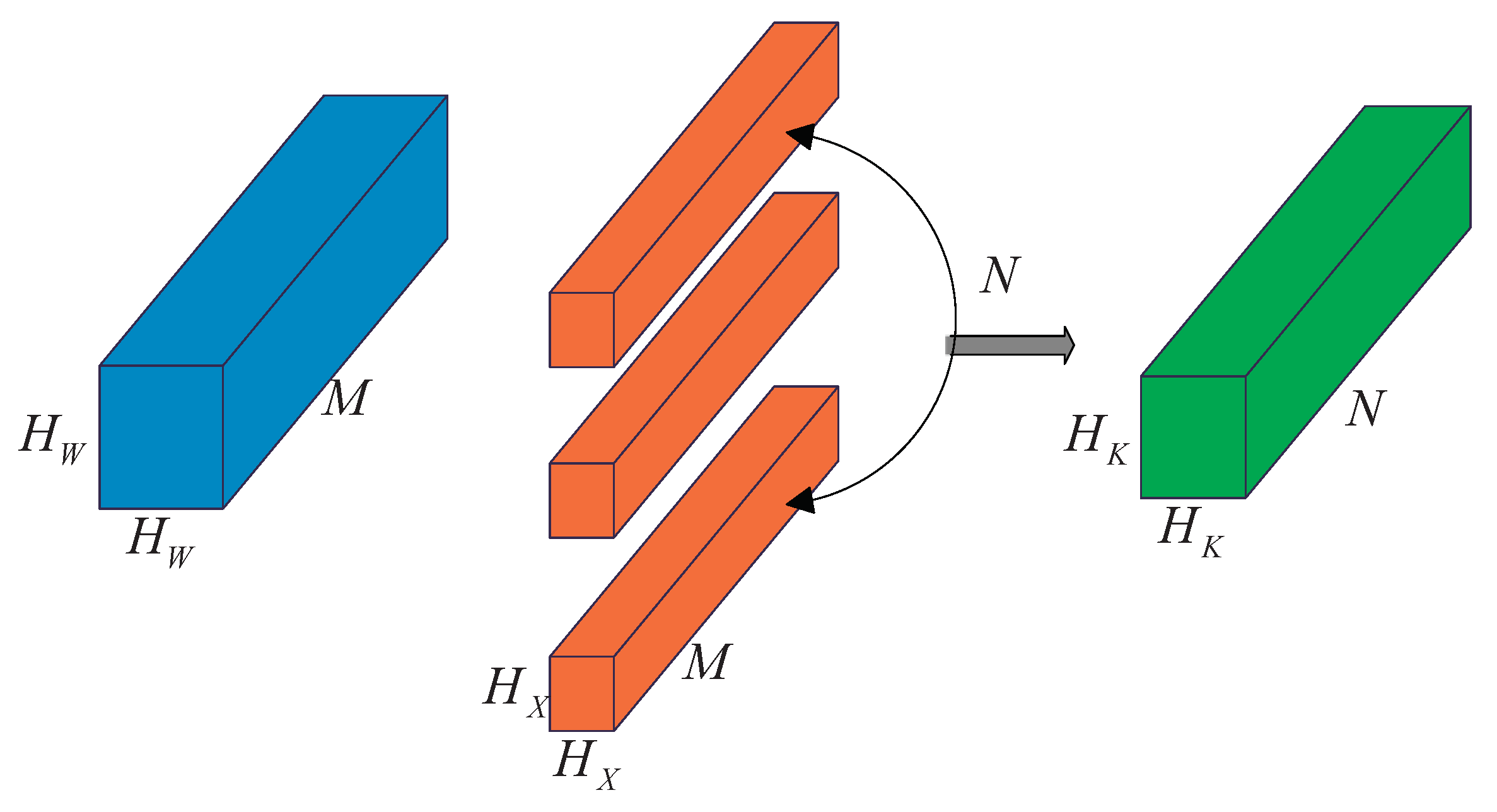
SMYOLO is formed by stacking with depth separable convolution while using point convolution to increase the depth of the network structure, making the SMYOLO network “narrow and deep”. In conventional convolution, assuming that the input feature dimension is
, the convolution kernel is
, and the output feature map is
. The calculation process is shown in the
Figure 3.
The amount of calculation required for conventional convolution to complete this process is shown in Equation (
1).
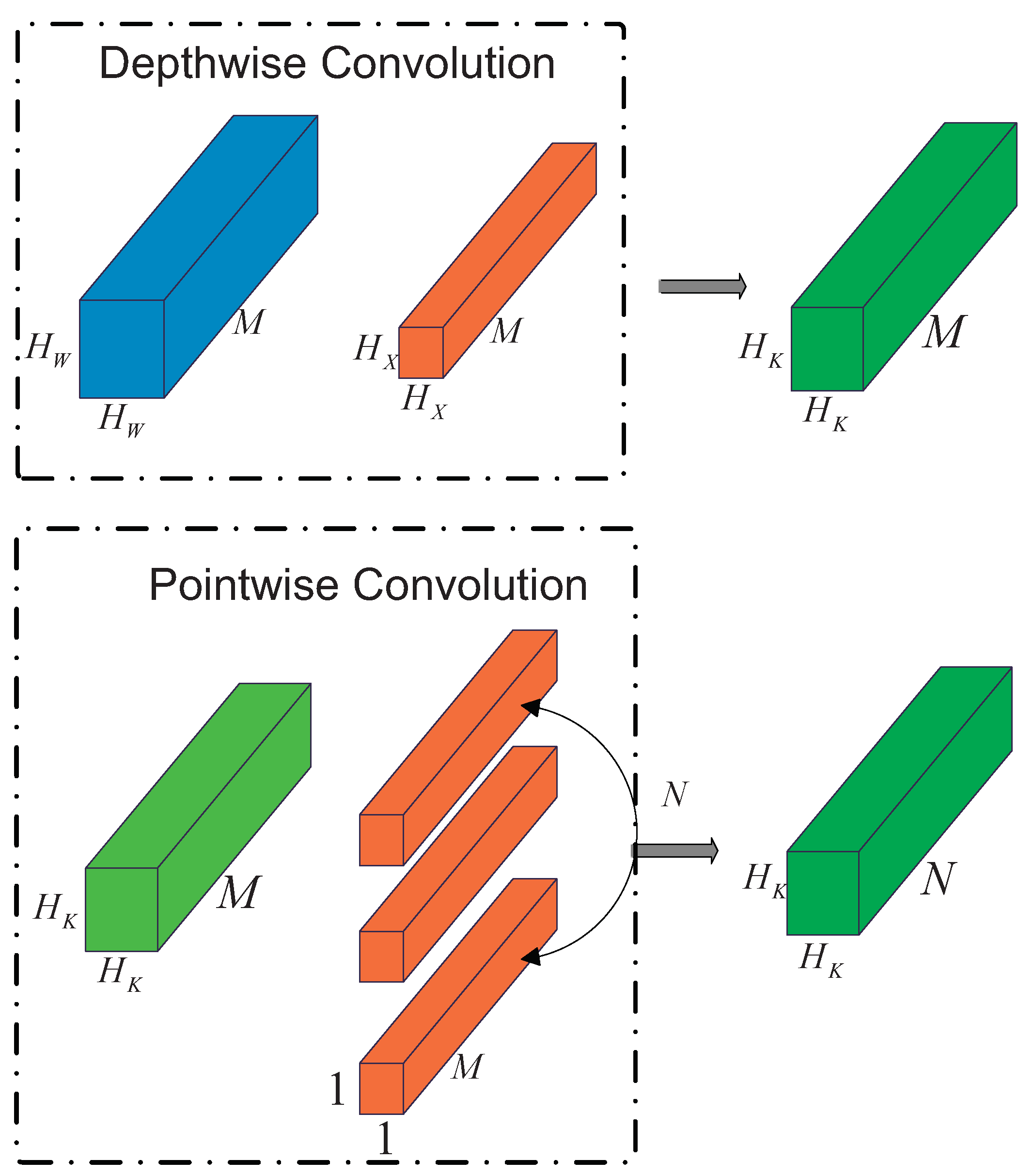
In-depth separable convolution is composed of depth convolution (Depthwise) and point convolution (Pointwise). Deep convolution works on each convolution channel, and point convolution integrates the convolution output of each channel. The calculation process is shown in
Figure 4.
SMYOLO’s depth separable convolution requires the amount of calculation to complete this process is shown in Equation (
2).
The SMYOLO compression ratio is the ratio of the parameter amount of the conventional convolution to the parameter amount of the depth separable convolution, namely:
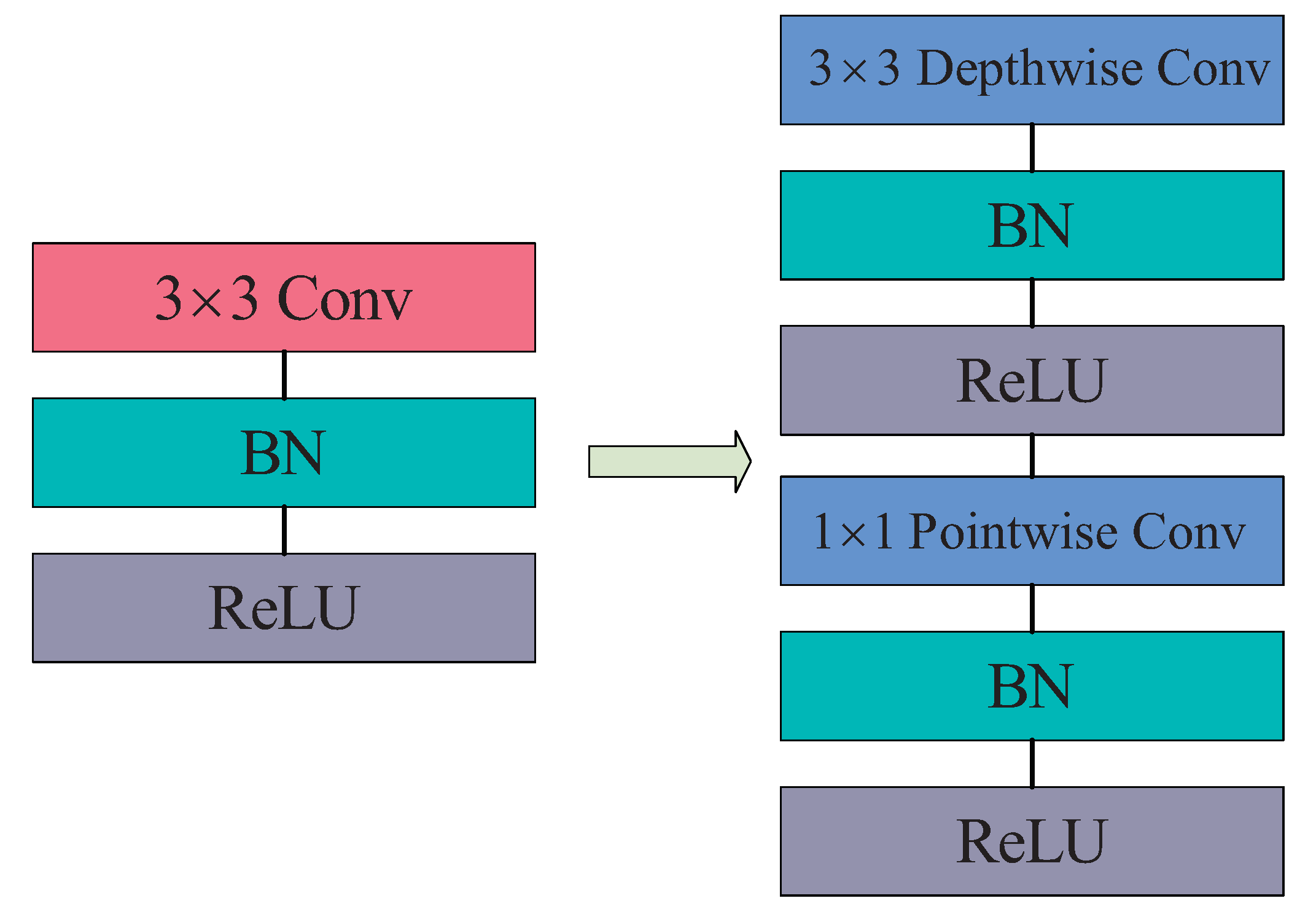
It can be seen from the above formula that the parameter amount of the depth separable convolution is less than that of the conventional convolution, so replacing the conventional convolution with the depth separable convolution can reduce the amount of calculation to a certain extent. The basic structure of the deep separable convolutional network is shown in
Figure 5. It will use deep convolution (Depthwise) and point convolution (Pointwise) instead of conventional convolution. In the SMYOLO target detection model, we not only replaced the conventional convolution in the head module of YOLOv4 with a depth separable convolution, but also modified the 3 × 3 conventional convolution in the PANet module in YOLOv4. We replaced it with depth separable convolution, which will reduce the number of parameters to a certain extent and thus reduce the amount of calculation deployed on drones’ onboard equipment.
3.1.2. Add Batch Normalization Layer
The SMYOLO model is a fully convolutional network specifically composed of conventional convolution, depth separable convolution, and point convolution. At the same time, the output of each layer of the convolutional network is processed by batch normalization. That is, a batch normalization (BN) layer is added. The proposal of the BN layer solves the gradient disappearance, and gradient explosion in the backpropagation process accelerates the convergence and improves the generalization ability. As shown in the Formula (
4), the BN layer uses small batches of normalized convolution features.
Among them, and represent the mean and standard deviation of the input features. and represent the scale factor and deviation.
3.1.3. Lightweight Activation Function
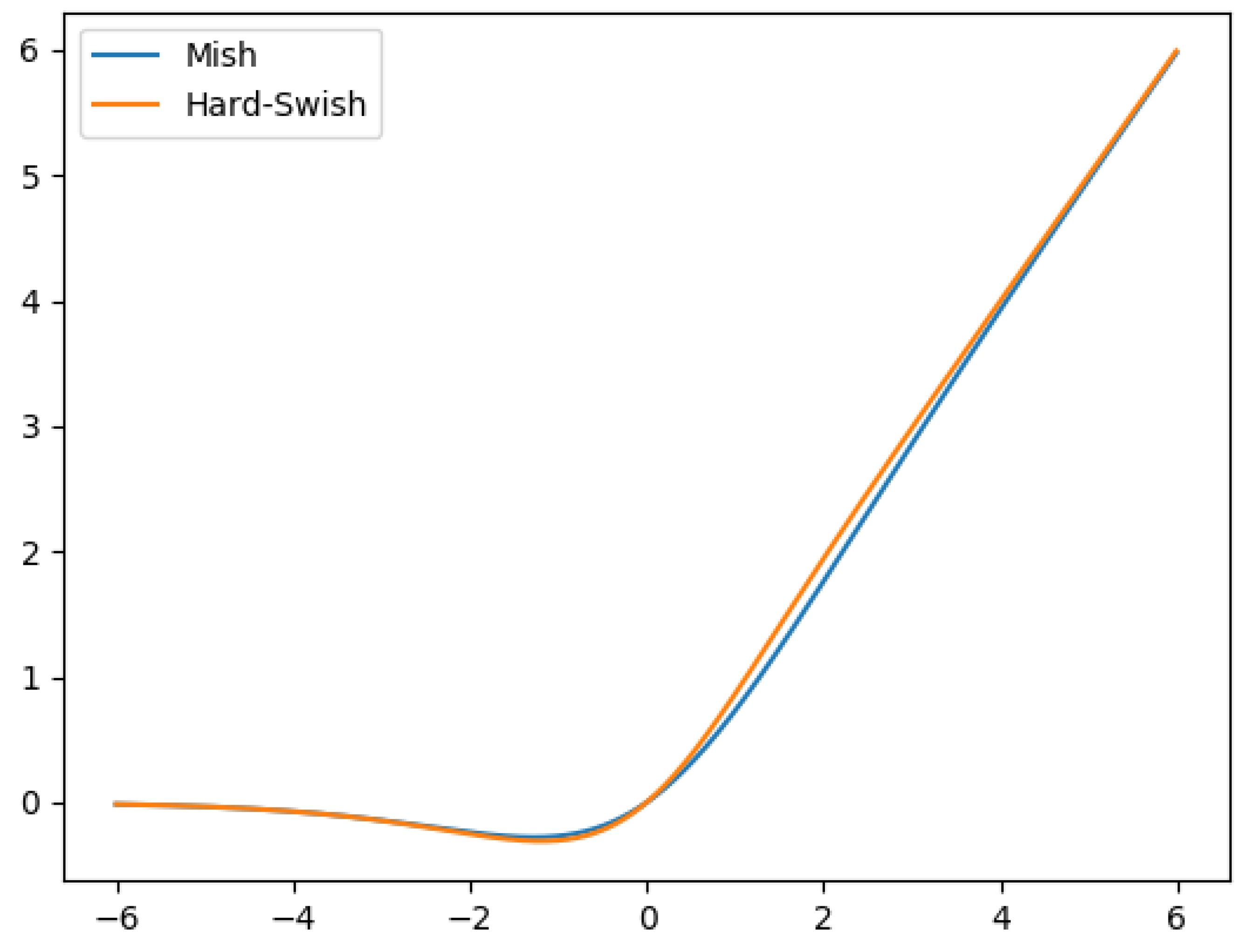
In YOLOv4, the Mish activation function is one of the innovations of YOLOv4. The Mish activation function is shown in Equation (
5). Compared with other commonly used functions such as ReLU and Swish, the Mish activation function is a smooth activation function, which can achieve better accuracy and generalization [
19]. Still, Mish activation will generate many calculations, making YOLOv4 unable to complete real-time detection. Therefore, we use the lightweight activation function Hard-swish, which has similar characteristics with the Mish activation function and reduces the number of model calculations. The comparison between the Hard-swish and Mish activation functions is shown in
Figure 6. Hard-swish is shown in Equation (
6).
The overall network architecture of the SMYOLO model is shown in
Figure 7, where Convolution represents conventional Convolution, Conv 1 × 1 represents point convolution, and Depthwise Conv represents depth separable Convolution. More profound network architecture can obtain higher accuracy. In contrast, a narrower network architecture limits the complexity of the network. Due to the limited computing power of airborne drone equipment, to limit the complexity of YOLOv4, SMYOLO uses deep separable convolution and point convolution to build the network. In the main convolution operation of the network backbone structure, by adding point convolution, the number of networks increases the depth of the network, thereby reducing the complexity of the model. Compared with other detection networks, SMYOLO has fewer network layers and fewer calculations, enabling it to deploy airborne drone equipment.
3.2. Improve the Accuracy of SMYOLO through Scale Matching
In low-altitude scenes, because the pedestrian targets captured by aerial photography are small, the practical features of the targets that can be extracted are limited, which is not conducive to detecting pedestrian targets in low-altitude scenes, which leads to low accuracy. In addition, SMYOLO also has a certain degree of accuracy loss while compressing, so this paper proposes to match the pre-training dataset with the detector learning dataset, which will improve the feature representation ability of the detector. SMYOLO can achieve more accurate pedestrian detection in low-altitude scenes. Scale Match matches the pre-training dataset with the detector learning dataset to improve feature representation and improve the detector’s performance. The scale matching is essential to make the histogram distribution of the pre-training dataset and the detector learning dataset similar.
First, calculate the scale distribution histogram of the target in the detector learning dataset. Then, calculate the average size
of the label box in any picture in the pre-training dataset, select a bin in the scale histogram of the detector learning dataset, and determine the used bin on the size
of the scale-matched label frame; the scale migration ratio
is obtained. Finally, scale matching is performed on the pictures in the pre-training dataset according to the scale migration ratio. The calculation formula for scale matching is shown in Equation (
8). Among them,
,
, and
represent the minimum and maximum size of the object, respectively.
represents the general density function, the abscissa of the probability density function is the size of the dataset label frame, and the ordinate is the probability density. After the pre-training dataset and the detector learning dataset are scale-matched, the performance of the SMYOLO target detector is improved.
This article first processes the VisDrone UAV dataset to extract pictures containing pedestrian targets. Secondly, we match the dataset COCO of the pre-trained model with the pedestrian dataset we extracted to enhance the feature representation ability of SMYOLO and increase the accuracy of the model.
4. Experiments
In this section, a series of experiments will be conducted to verify the performance of the proposed method and compare it with the current mainstream methods. The experimental platform is a PC with a @2.0 GHz CPU and 16G memory. The experiment is mainly implemented on Python 3.7 based on PyTorch and is accelerated by NVIDIA GeForce TITAN XP with 12 GB of memory.
4.1. Performance Evaluation Standard
The experimental data is the publicly available VisDrone2021 DET, collected under various weather and lighting conditions using various drone platforms (drones with different models). The training and validation sets contain 6471 pictures, and the test set contains 1580 images. It should be pointed out that we only extract pedestrian targets in this dataset for training and testing. In the end, we have 5886 images in the training set and validation set and 1197 images in the test set. In order to evaluate the performance of the proposed method, the following evaluation indicators will be used for evaluation.
Frame per second (FPS) measures the speed of object detection, representing the number of video frames that the detector can process per second, and the experiment is to test the FPS of different object detectors on a single GPU.
Intersection over union (IoU) represents the overlap rate between the generated candidate bound and the ground truth bound [
26]. The ideal situation is complete overlap. That is, and the ratio is 1.
The mAP is the standard for the detection accuracy of the object detector. It is related to the value of IoU. In the experiment, the value of IoU is set to 0.5, and mAP is the area under the curve of precision and recall. The definition of precision and recall are:
Among them, represents the number of detection boxes with , represents the number of detection boxes with , and represents the number of undetected.
4.2. Experimental Results and Analysis
4.2.1. Comparison of Different Network Architectures
This experiment compares SMYOLO with three other advanced target detection algorithms and calculates the parameter size and inference speed of each model to verify the effectiveness of SMYOLO. The experimental results are shown in the
Table 1. Compared with the original model YOLOv4, SMYOLO has reduced the parameter amount by 81%, the model size has been reduced by 76.90%, and the inference speed has increased by 43.29%. The reduction in parameters and model size indicate that the conventional convolution is replaced. For deep separable convolution and point convolution, the network can be made deep and narrow, and the model can be effectively simplified. The increase in forwarding reasoning time reflects that SMYOLO is more suitable for airborne platforms with poor computing capabilities than YOLOv4. Experimental results show that SMYOLO replaces conventional convolutions with deep separable convolutions and point convolutions, making the network deep and narrow, reducing the amount of calculation, and enabling it to be deployed on airborne platforms, and solves the problem of the high computational load of high-precision target detection models.
4.2.2. The Effect of Using BN and Multi-Scale Training
This experiment compares the detection results of whether to use the BN layer and multi-scale training. “Y” means used, and “N” means not used. The experimental results are shown in the
Table 2. It can be seen from the table that when SMYOLO only uses the BN layer, the detection accuracy mAP is increased by 3.63%, and the detection accuracy is further increased by 4.28% by using multi-scale training based on the BN layer. Therefore, the SMYOLO network uses the corresponding activation operation of the BN layer for normalization processing and uses multi-scale training in the training process, which improves the accuracy of SMYOLO to a certain extent and enhances its robustness. In addition, in model training, the convergence speed of SMYOLO without the BN layer is very slow, and the time consumption is about four times that of the BN layer. Overall, it is shown that SMYOLO can improve the detection performance by adding multi-scale training based on using the BN layer.
4.2.3. The Effect of the Scale Matching Method
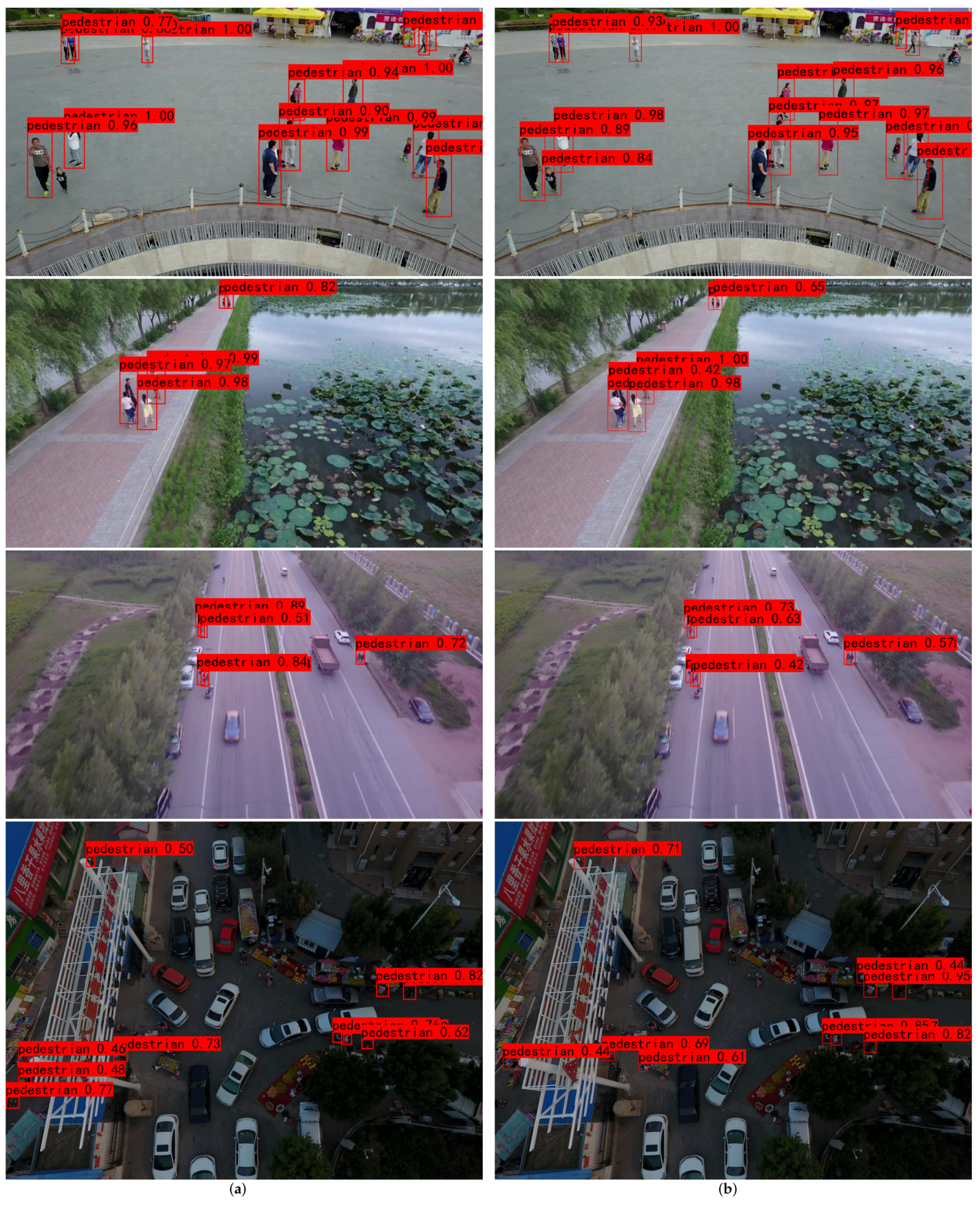
To verify the effect of the proposed scale matching method and show that the proposed method is effective, this experiment compares the detection results of SMYOLO without scale matching and after scale matching. This experiment compares the detection results of whether to use scale matching, and the detection accuracy has been improved. Scale matching can eliminate false positive objects and increase false negative object instances, which improves the performance of the target detector. As shown in
Figure 8, in the first example, the missed detection rate is higher before the scale is matched, and after the scale is matched, the missed detection rate is reduced. The overall results show that scale matching can improve detection accuracy. As shown in the figure, in the first example, before the scales are matched, the two children in the picture have small individuals, which increases the difficulty of detection to a certain extent, so there are instances of missed detection. After the scales were matched, the two children were successfully identified, the missed detection rate was reduced, and the missed detection cases were eliminated. In the third example, the target is smaller because the drone is located higher. When pedestrians walk side by side, it will increase the difficulty of detection. Therefore, SMYOLO recognizes the two pedestrians as the same person before the scale is matched. After matching, the missed detection rate is reduced, and the missed detection instances are successfully identified. The overall results show that the scale matching will improve the detection accuracy of SMYOLO.
4.2.4. Compare Experiments with Advanced Detectors
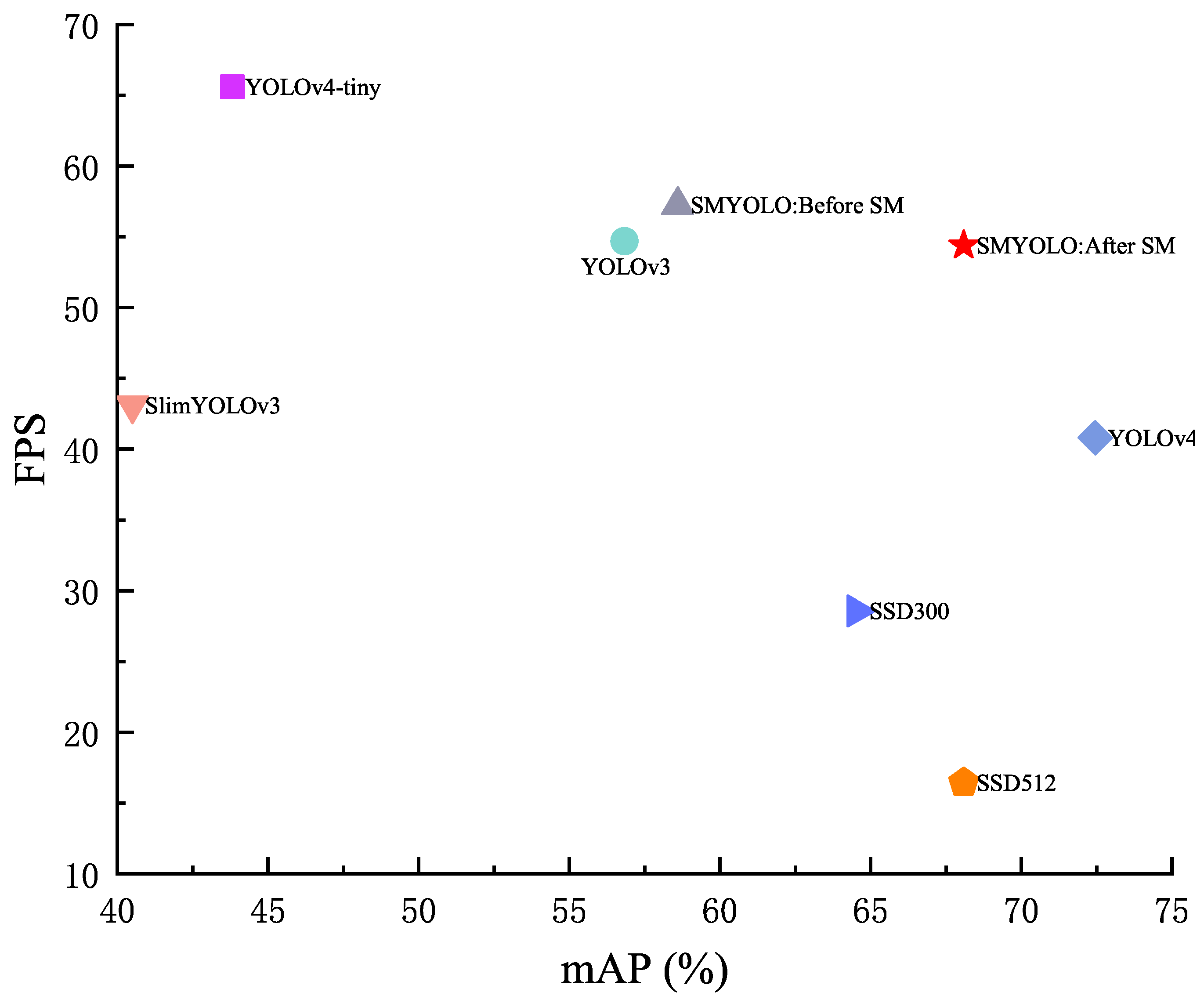
This paper compares the detection accuracy and speed with the five most advanced detectors to verify the performance of the proposed pedestrian detection method, including YOLOv4-Tiny, YOLOv3, YOLOv4, SSD, and SlimYOLOv3. All of the target detectors use the COCO dataset as the pre-training dataset and are trained based on the VisDrone dataset. As shown in
Figure 9, compared with the original YOLOv4, the volume of the SMYOLO model is reduced by 76.9%, mAP is reduced by 12.65%, and FPS is increased by 33.25%. After the scale matching, the accuracy is increased by 9.49%. Compared with YOLOv4-tiny, the proposed pedestrian detection algorithm mAP increased by 24.27%. Compared with YOLOv4, the overall FPS increased by 33.33%, achieving the accuracy of mAP and the speed FPS balance, reaching 68.09% and 54.4. As shown in
Table 3, the table shows the detailed detection results of different target detectors in the pedestrian dataset extracted by VisDrone. The SSD detector uses a deeper network model, so the accuracy is high. Nevertheless, the complexity of the calculation increases, resulting in real-time performance being inferior. Although YOLOv4 minimally achieves the best real-time performance, it has a poor detection effect on pedestrian targets and low performance. SlimYOLOv3 is an excellent model to improve the YOLO series because this model reduces the complexity of the model through pruning, but the accuracy is not ideal. If deployed on a drone, it cannot achieve the balance of accuracy and delay. In general, the method proposed in this paper improves the detection accuracy while ensuring real-time performance in pedestrian target detection.
5. Conclusions
This paper proposes a pedestrian detection algorithm based on deep separable convolution in the UAV scene, which mainly solves the problem of the limited computing power of embedded devices. Secondly, it solves the problem of missed detection of lightweight networks. This algorithm replaces the YOLOv4 conventional convolution with a depth separable convolution, increases the network depth, reduces the network width, and makes the network architecture “narrow and deep”, which greatly reduces the number of model parameters and improves the detection efficiency. At the same time, the BN layer and multi-scale training methods are used to improve the model’s accuracy. In addition, we use the scale matching method to solve the problem of feature representation loss caused by scale mismatch, which increases the detection accuracy of SMYOLO to a certain extent. We tested SMYOLO in the same environment. Compared with other detection algorithms, SMYOLO performed more prominently. To ensure the detection accuracy of the model, the detection model has a good detection effect on the target detection on the mobile end of the UAV. We expect to get a faster model while ensuring the same accuracy in the future.
Author Contributions
Conceptualization, W.Z., X.M. and Y.Z.; funding acquisition, W.Z.; investigation, X.M., M.J. and C.Z.; methodology, W.Z. and X.M.; project administration, W.Z.; software, X.M.; supervision, Y.Z., M.J. and C.Z.; Writing—original draft, X.M.; Writing—review and editing, X.M. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Natural Science Foundation of China (Grant No. 61976098), the Technology Development Foundation of Quanzhou City (Grant No. 2020C067), Key Science and Technology Project of Xiamen City (Grant No. 3502ZCQ20201008).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Conflicts of Interest
The authors declare no conflict of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| CNN | Convolutional neural network |
| SDD | Stanford drone dataset |
| BN | Batch normalization |
| SM | Scale match |
| UAV | Unmanned aerial vehicles |
| RPN | RegionProposal Network |
| SE | Squeeze-and-Excitation |
References
- Li, H.; Wu, Z.; Zhang, J. Pedestrian detection based on deep learning model. In Proceedings of the 2016 9th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics (CISP-BMEI), Datong, China, 15–17 October 2016; pp. 796–800. [Google Scholar] [CrossRef]
- Zhao, Y.; Yuan, Z.; Chen, B. Accurate Pedestrian Detection by Human Pose Regression. IEEE Trans. Image Process. 2020, 29, 1591–1605. [Google Scholar] [CrossRef] [PubMed]
- Sabokrou, M.; Fayyaz, M.; Fathy, M.; Klette, R. Deep-Cascade: Cascading 3D Deep Neural Networks for Fast Anomaly Detection and Localization in Crowded Scenes. IEEE Trans. Image Process. 2017, 26, 1992–2004. [Google Scholar] [CrossRef] [PubMed]
- Sermanet, P.; Kavukcuoglu, K.; Chintala, S.; Lecun, Y. Pedestrian Detection with Unsupervised Multi-stage Feature Learning. In Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Portland, OR, USA, 23–28 June 2013; IEEE Computer Society: Los Alamitos, CA, USA, 2013; pp. 3626–3633. [Google Scholar] [CrossRef] [Green Version]
- Chen, S.; Zhang, H.; Lei, Z. Person Re-Identification Based on Attention Mechanism and Context Information Fusion. Future Internet 2021, 13, 72. [Google Scholar] [CrossRef]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich Feature Hierarchies for Accurate Object Detection and Semantic Segmentation. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar] [CrossRef] [Green Version]
- Girshick, R. Fast r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1137–1149. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.E.; Fu, C.; Berg, A.C. SSD: Single Shot MultiBox Detector. In European Conference on Computer Vision; Springer: Cham, Switzerland, 2016; pp. 21–37. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar] [CrossRef] [Green Version]
- Redmon, J.; Farhadi, A. YOLO9000: Better, Faster, Stronger. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21– July 2017; pp. 6517–6525. [Google Scholar] [CrossRef] [Green Version]
- Redmon, J.; Farhadi, A. YOLOv3: An Incremental Improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y.M. YOLOv4: Optimal Speed and Accuracy of Object Detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Liu, M.; Wang, X.; Zhou, A.; Fu, X.; Piao, C. UAV-YOLO: Small Object Detection on Unmanned Aerial Vehicle Perspective. Sensors 2020, 20, 2238. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yu, X.; Gong, Y.; Jiang, N.; Ye, Q.; Han, Z. Scale Match for Tiny Person Detection. arXiv 2019, arXiv:1912.10664. [Google Scholar]
- Shao, X.; Wei, J.; Guo, D.; Zheng, R.; Zhao, Y. Pedestrian Detection Algorithm based on Improved Faster RCNN. In Proceedings of the 2021 IEEE 5th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 12–14 March 2021. [Google Scholar]
- Wu, D.; Lv, S.; Jiang, M.; Song, H. Using channel pruning-based YOLO v4 deep learning algorithm for the real-time and accurate detection of apple flowers in natural environments. Comput. Electron. Agric. 2020, 178, 105742. [Google Scholar] [CrossRef]
- Yu, Z.; Shen, Y.; Shen, C. A real-time detection approach for bridge cracks based on YOLOv4-FPM. Autom. Constr. 2021, 122, 103514. [Google Scholar] [CrossRef]
- Yang, Y.; Xie, G.; Qu, Y. Real-time Detection of Aircraft Objects in Remote Sensing Images Based on Improved YOLOv4. In Proceedings of the 2021 IEEE 5th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 12–14 March 2021; Volume 5, pp. 1156–1164. [Google Scholar]
- Zhao, H.; Zhou, Y.; Zhang, L.; Peng, Y.; Hu, X.; Peng, H.; Cai, X. Mixed YOLOv3-LITE: A Lightweight Real-Time Object Detection Method. Sensors 2020, 20, 1861. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Alfasly, S.; Liu, B.; Hu, Y.; Wang, Y.; Li, C.T. Auto-Zooming CNN-Based Framework for Real-Time Pedestrian Detection in Outdoor Surveillance Videos. IEEE Access 2019, 7, 105816–105826. [Google Scholar] [CrossRef]
- Ke, X.; Lin, X.; Qin, L. Lightweight convolutional neural network-based pedestrian detection and re-identification in multiple scenarios. Mach. Vis. Appl. 2021, 32, 1–23. [Google Scholar] [CrossRef]
- Liu, S.; Qi, L.; Qin, H.; Shi, J.; Jia, J. Path Aggregation Network for Instance Segmentation. arXiv 2018, arXiv:1803.01534. [Google Scholar]
- Lin, T.Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature Pyramid Networks for Object Detection. arXiv 2017, arXiv:1612.03144. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition. In Computer Vision—ECCV 2014; Fleet, D., Pajdla, T., Schiele, B., Tuytelaars, T., Eds.; Springer International Publishing: Cham, Switzerland, 12 September 2014; pp. 346–361. [Google Scholar]
- Rahman, M.A.; Wang, Y. Advances in Visual Computing. Optimizing Intersection-Over-Union in Deep Neural Networks for Image Segmentation; Springer International Publishing: Berlin/Heidelberg, Germany, 2016; Volume 10072, pp. 234–244. [Google Scholar]
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}