
Experimental Evaluation of a LoRa Wildlife Monitoring Network in a Forest Vegetation Area



Abstract
1. Introduction
- A comprehensive state-of-the-art section is provided on the LPWAN technologies used for smart agriculture applications and wildlife monitoring network.
- The design and implementation of a prototype device used for the experimental tests are described in detail.
- The radio planning analysis, which evaluates the performance of LoRa network operating in the 433 MHz and 868 MHz aimed at wildlife monitoring in a forest vegetation, is presented, together with experimental results.
- Comparison of real-life RSSI values collected from the experimental test to values generated using an RF planning tool.
2. State-of-the-Art and Related Works
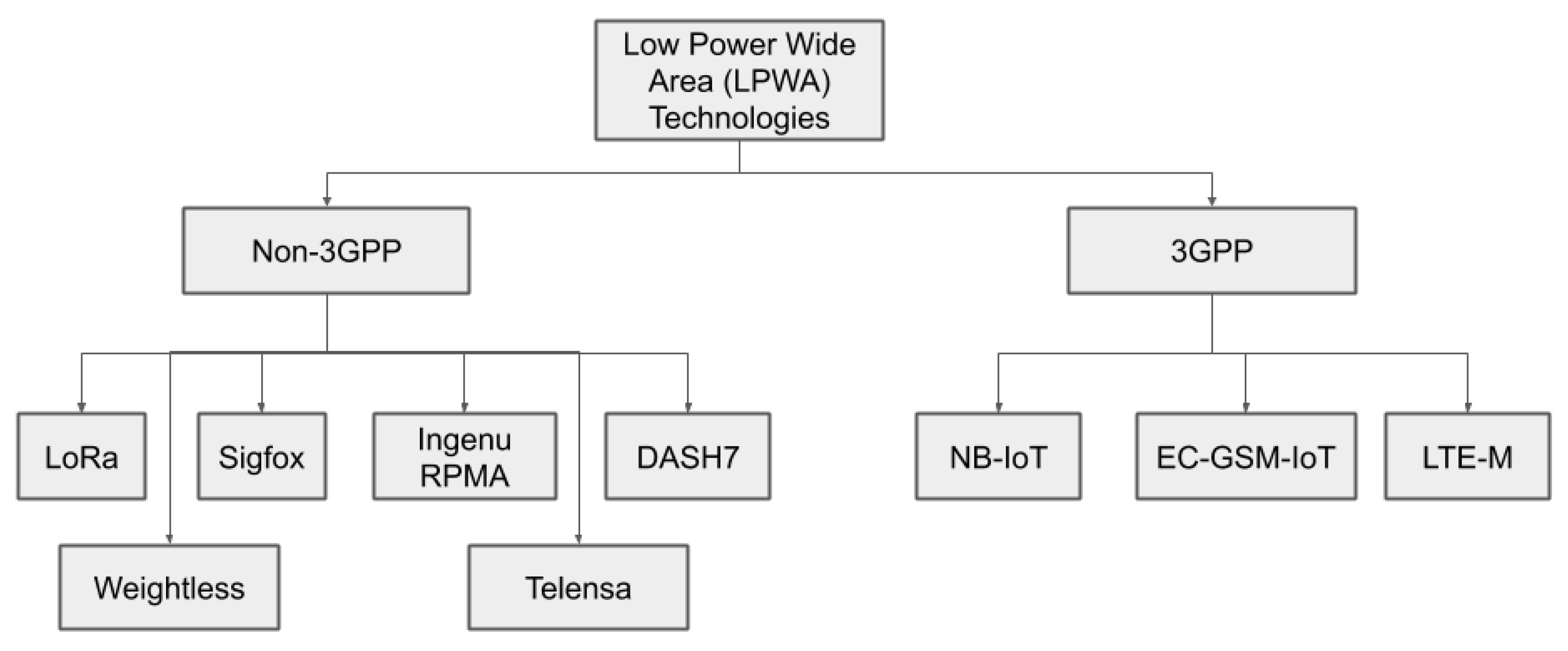
2.1. LPWAN Technologies for Smart Agriculture and Wildlife Monitoring
LoRa and LoRaWAN
- End Nodes are devices embedded with LoRa chips. There are 3 classes of end-devices: Class A (for All), B (for Beacon) and C (for Continuously listening), each associated with a different operating mode. The devices broadcast their sensor values to all gateways in all range which forward data packets to a single network server over an IP based network.
- Gateways are intermediate devices running an operating system that forward data packets coming from the end nodes to a network server over an IP-based backhaul network. In a LoRaWAN deployment, there can be multiple gateways receiving data packets from a LoRa end device. Usually, LoRa gateways are publicly available and transparently connected to a cloud community service.
- Network Server performs a lot of functions, such as filtering redundant packets, performing an adaptive rate, performing security checks and generally managing the network.
- Application Server is responsible for the encryption, decryption, and processing of data from the network server. The application server allows users to access and manage the gateway, nodes and applications.
- Bandwidth (BW) is the range of transmission frequencies varying between 7.8 kHz and 500 kHz. The greater the bandwidth value is, the more the transmitted data, thus reducing transmission time and resulting in lower sensitivity.
- Spreading factor (SF) characterizes the number of bits sent in each LoRa symbol. SF take values between 7 and 12 resulting in different time-on-air , thus, varying receiver sensitivity. Having a higher such as denotes a longer range with low bit rate and better receiver sensitivity. The relationship between the LoRa transmission and the used LoRa parameters is denoted as .
- Transmitted Power (TP): By default, the maximum effective isotropic radiated power (EIRP) for LoRa end-device operating in the 433 MHz and 868 MHz band are 12.15 dBm and 16 dBm respectively.
- Code rate (CR) is related to the number of redundant bits used to improve the packet error rate in the presence of noise and interference. In other words, LoRa provides forward error correction capability by adding extra redundant bits to improve the robustness of transmission. The possible values of are , , and . A lower coding rate results in greater robustness at the expense of increased transmission time and high energy consumption. The resulting bit rate equation is given bywhere i takes on values between 1 to 4 in increment steps of 1. The noise floor is given byFor a channel bandwidth of 125 KHz and , this translates to a figure of dBm. Table 1 presents the LoRa main configuration parameters. It is worth noting that different combinations of the aforementioned transmission parameters yield different trade-offs with respect to the range and data rate that can be achieved, and these combinations are also governed by regulatory constraints.
2.2. Related Works
3. System Architecture
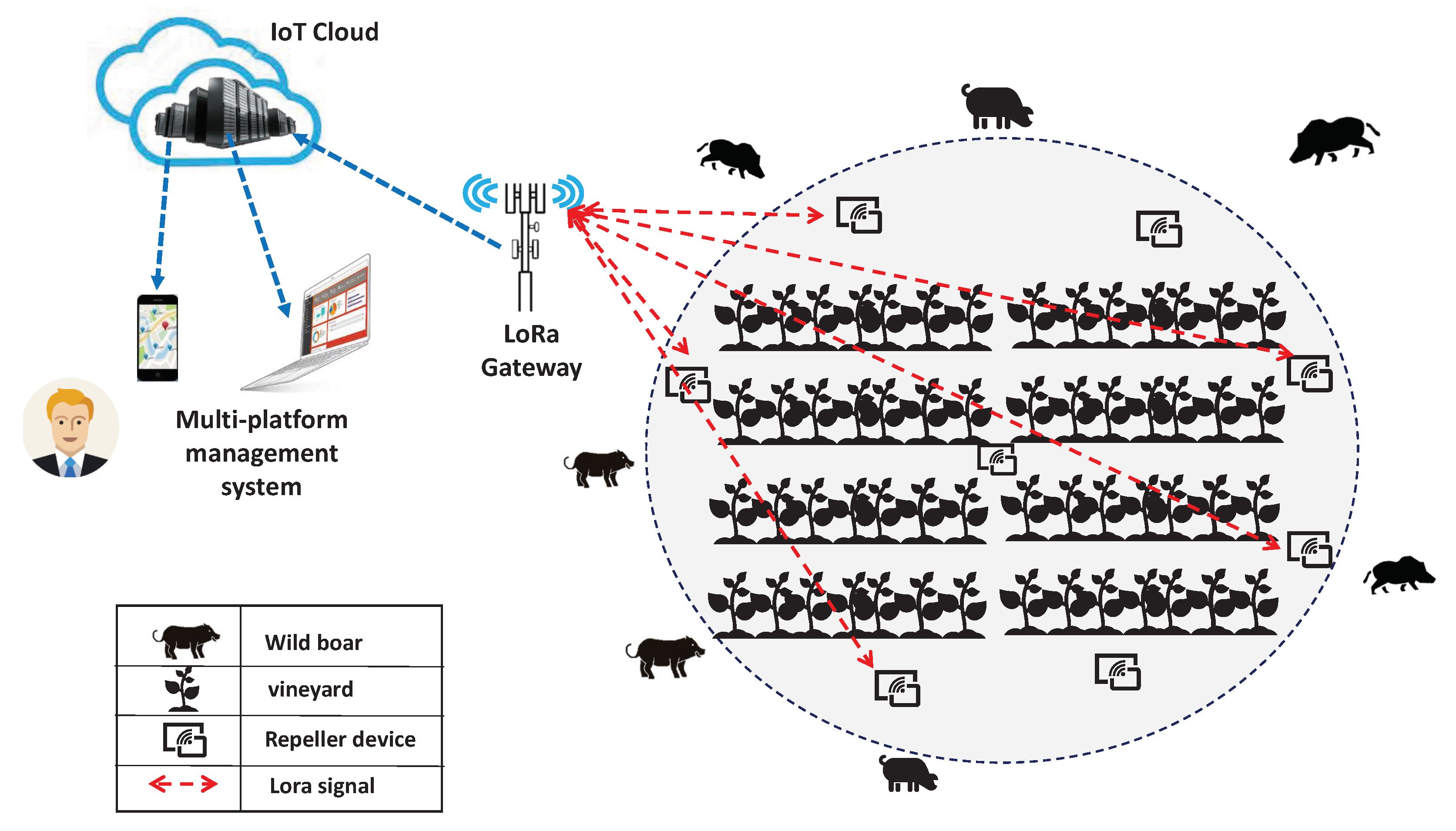
3.1. System Description
3.2. LoRa Field Packet Generator
3.2.1. Key Requirements
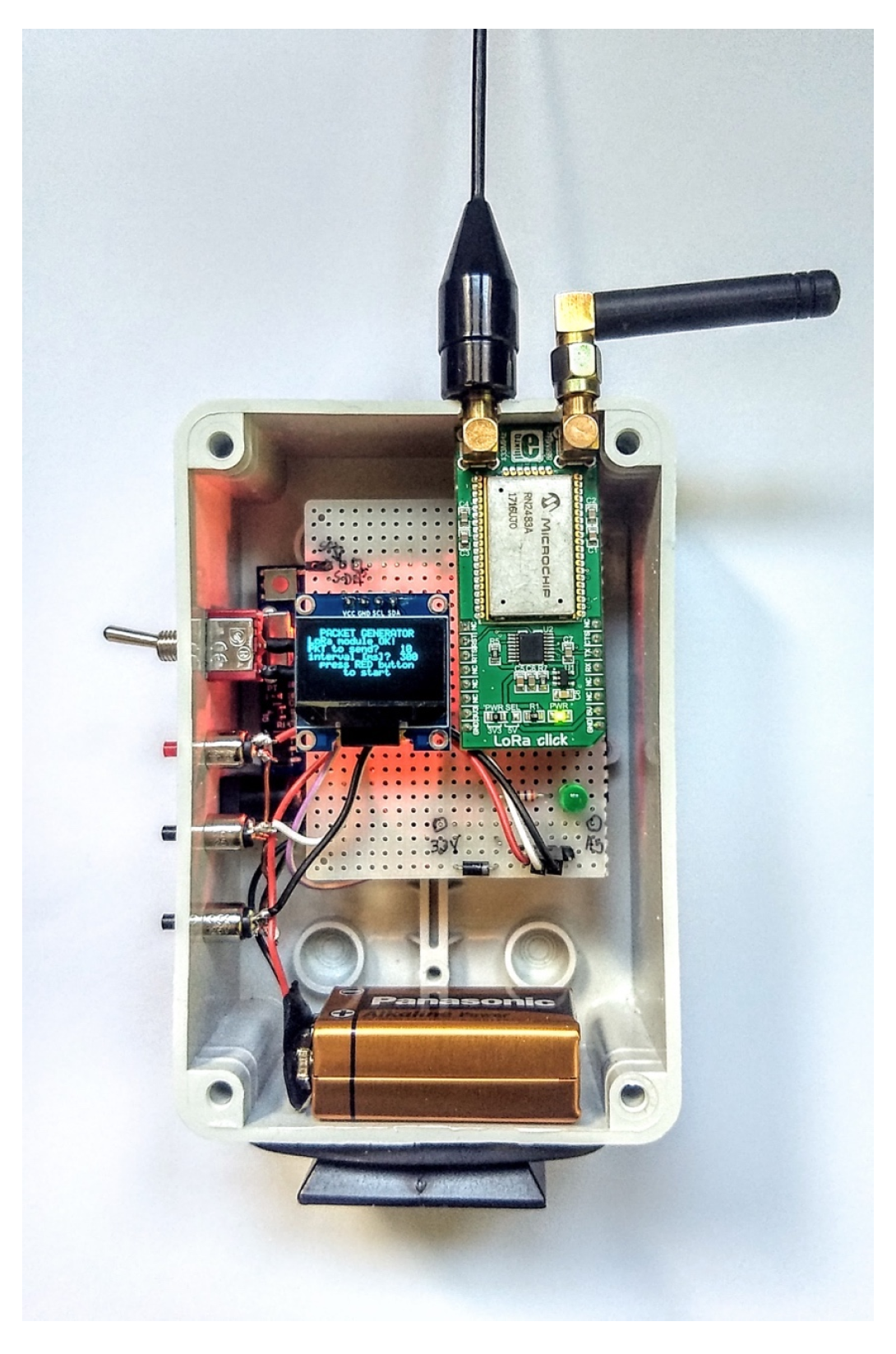
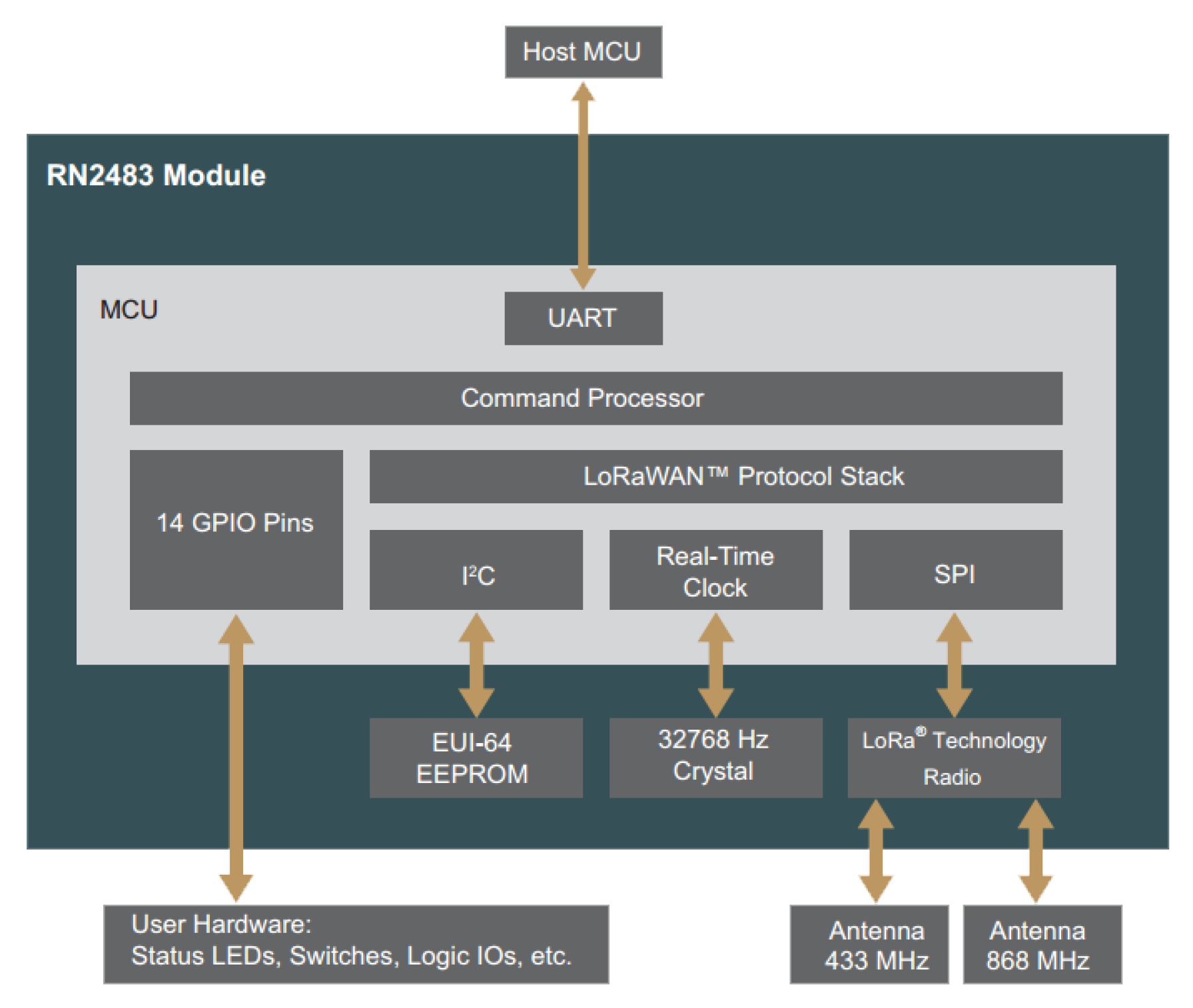
3.2.2. Hardware Realization
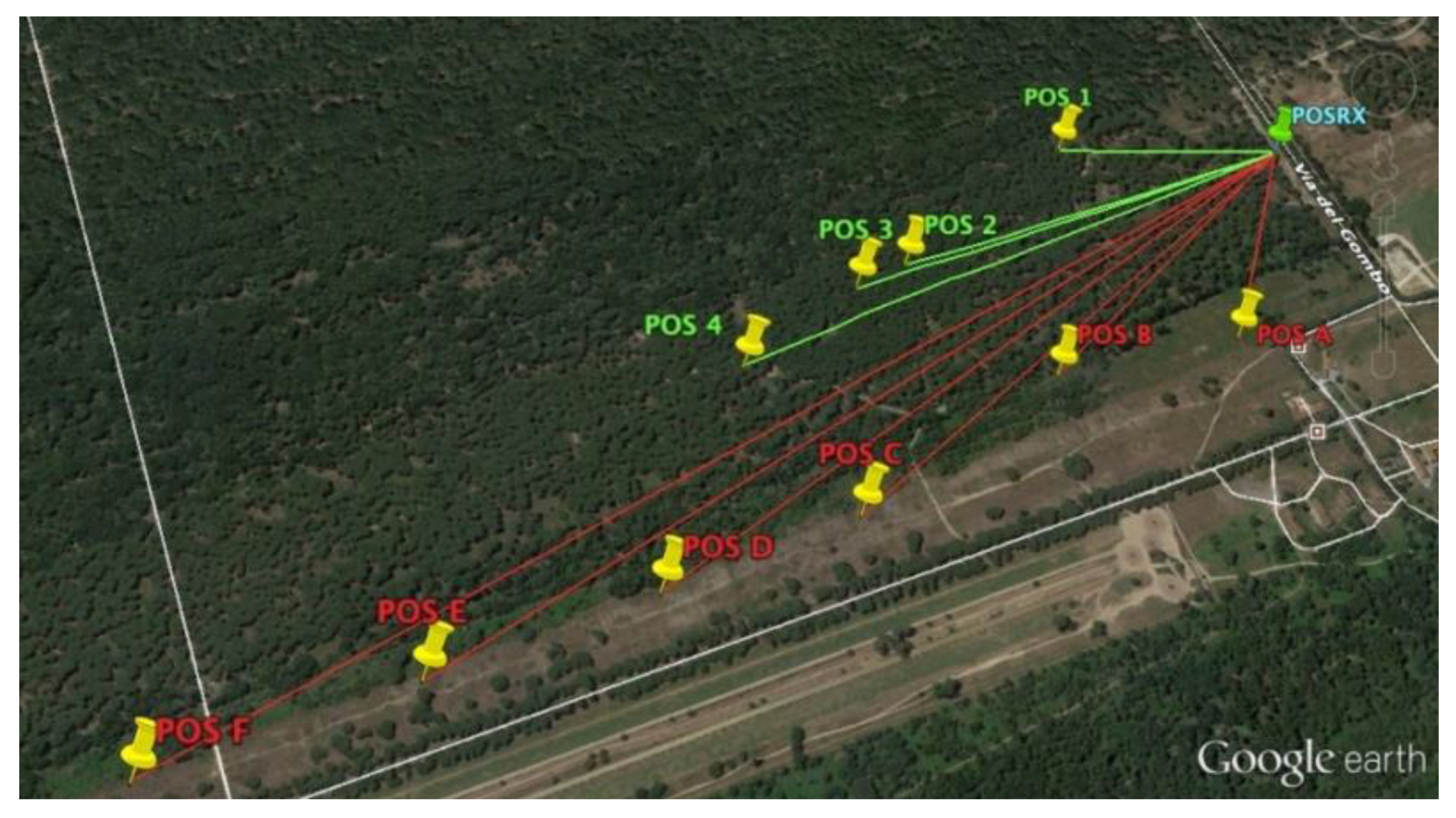
4. Testbed and Experimental Setup
5. Experimental Results and Discussion
5.1. Experimental Results
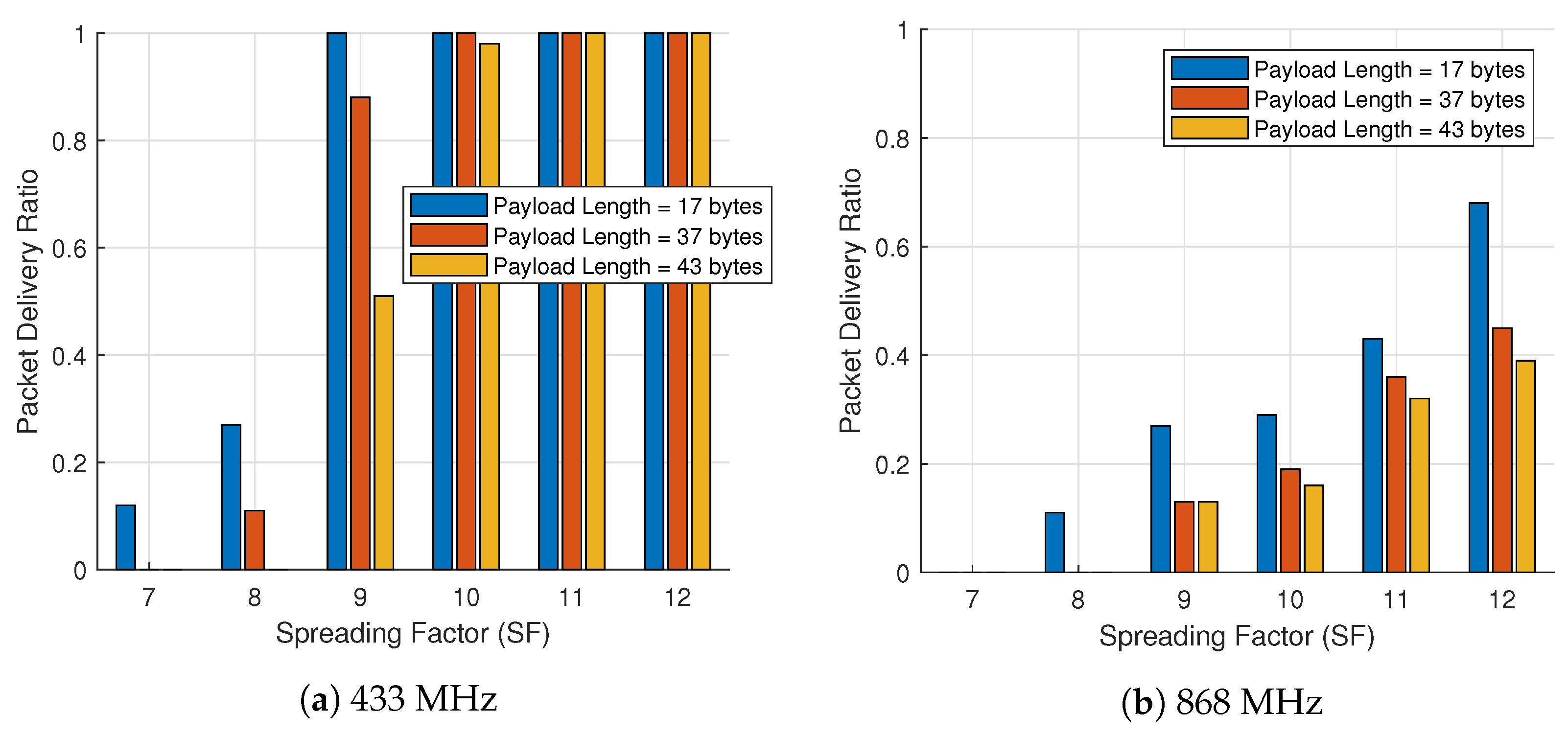
5.1.1. Effects of the Payload Length
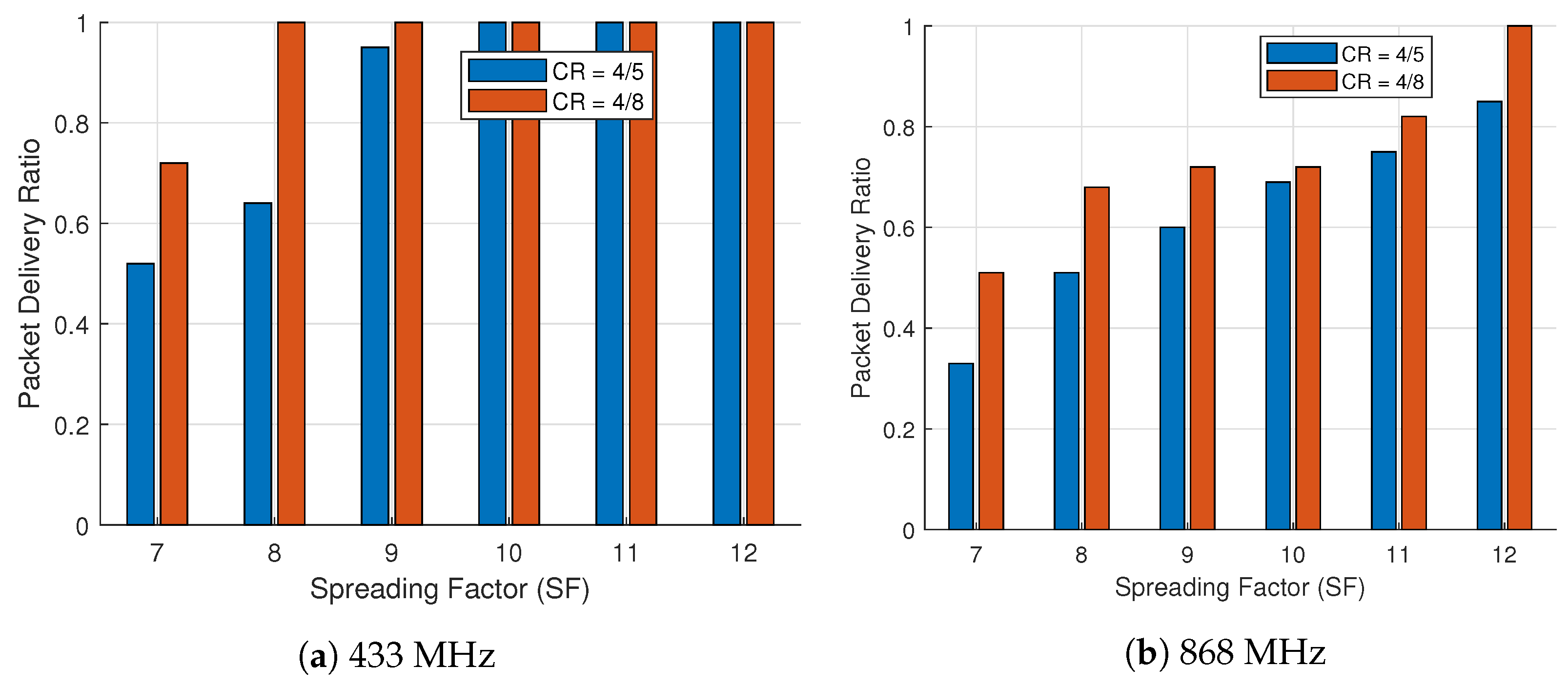
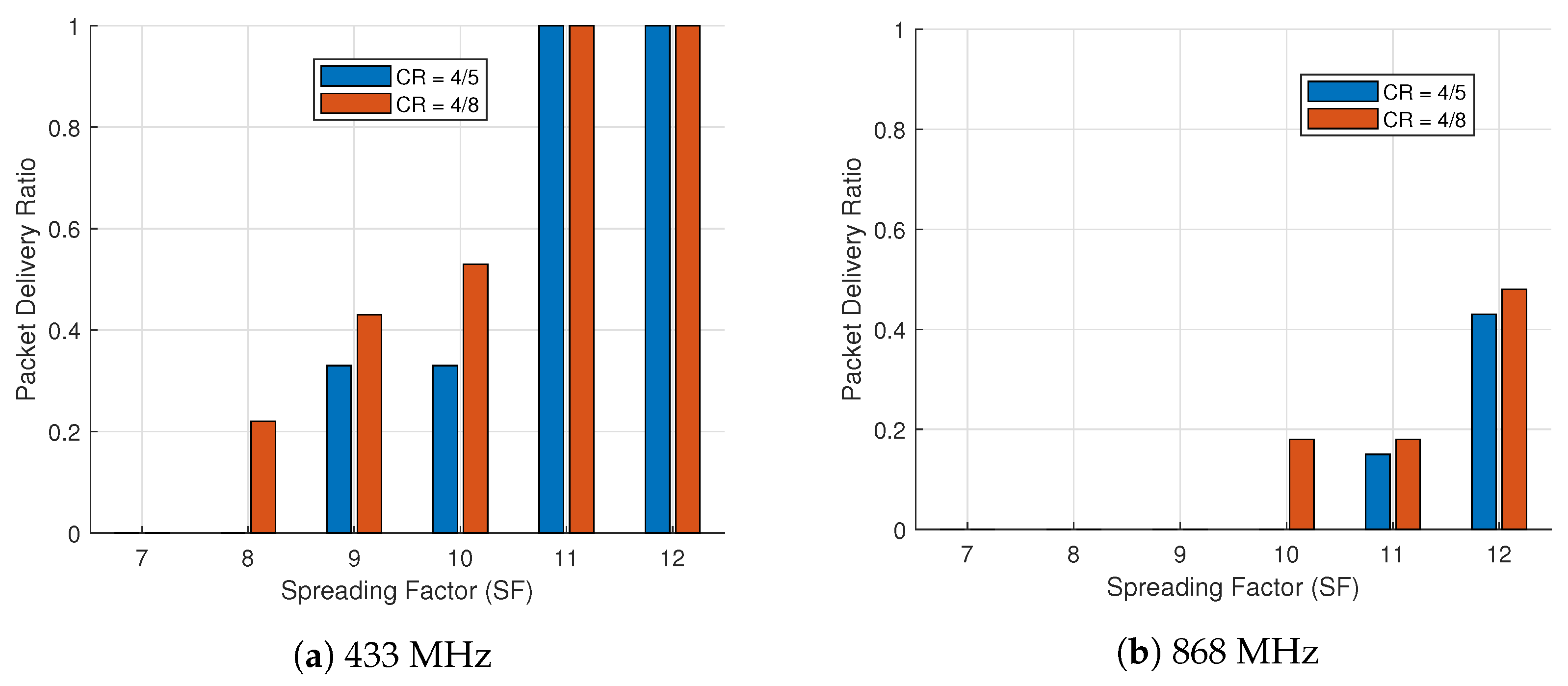
5.1.2. Effects of the CR
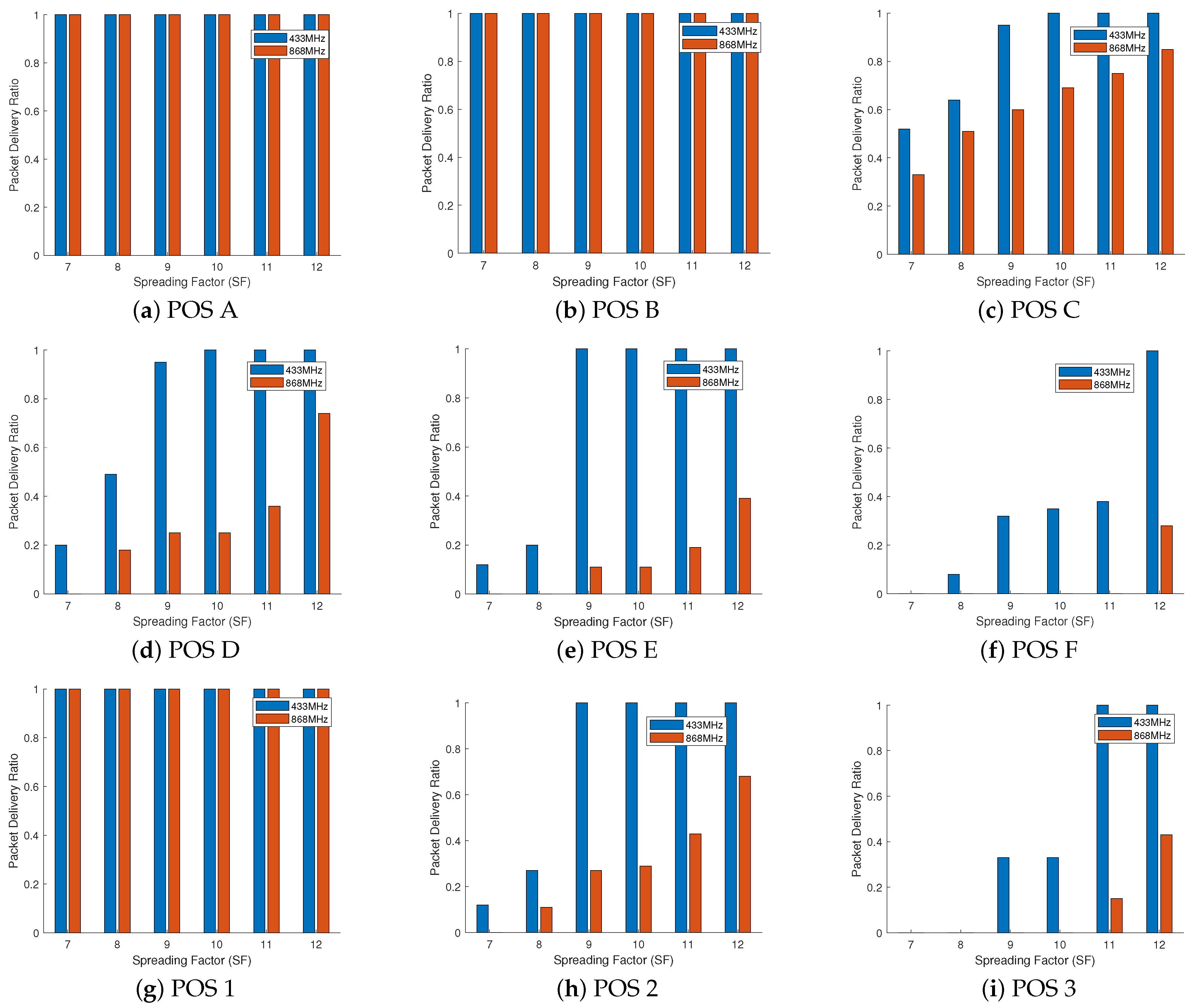
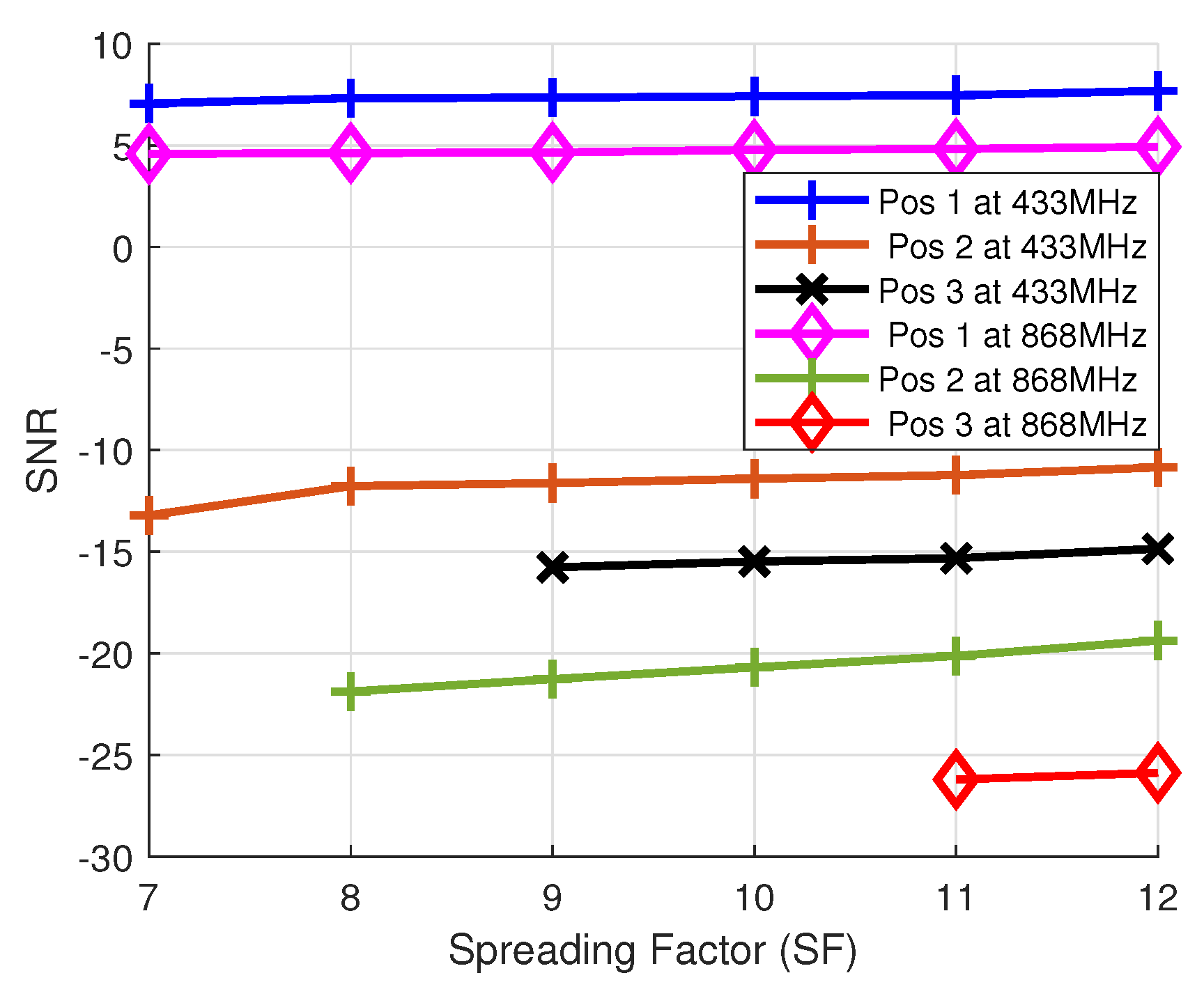
5.1.3. Effects of the SF
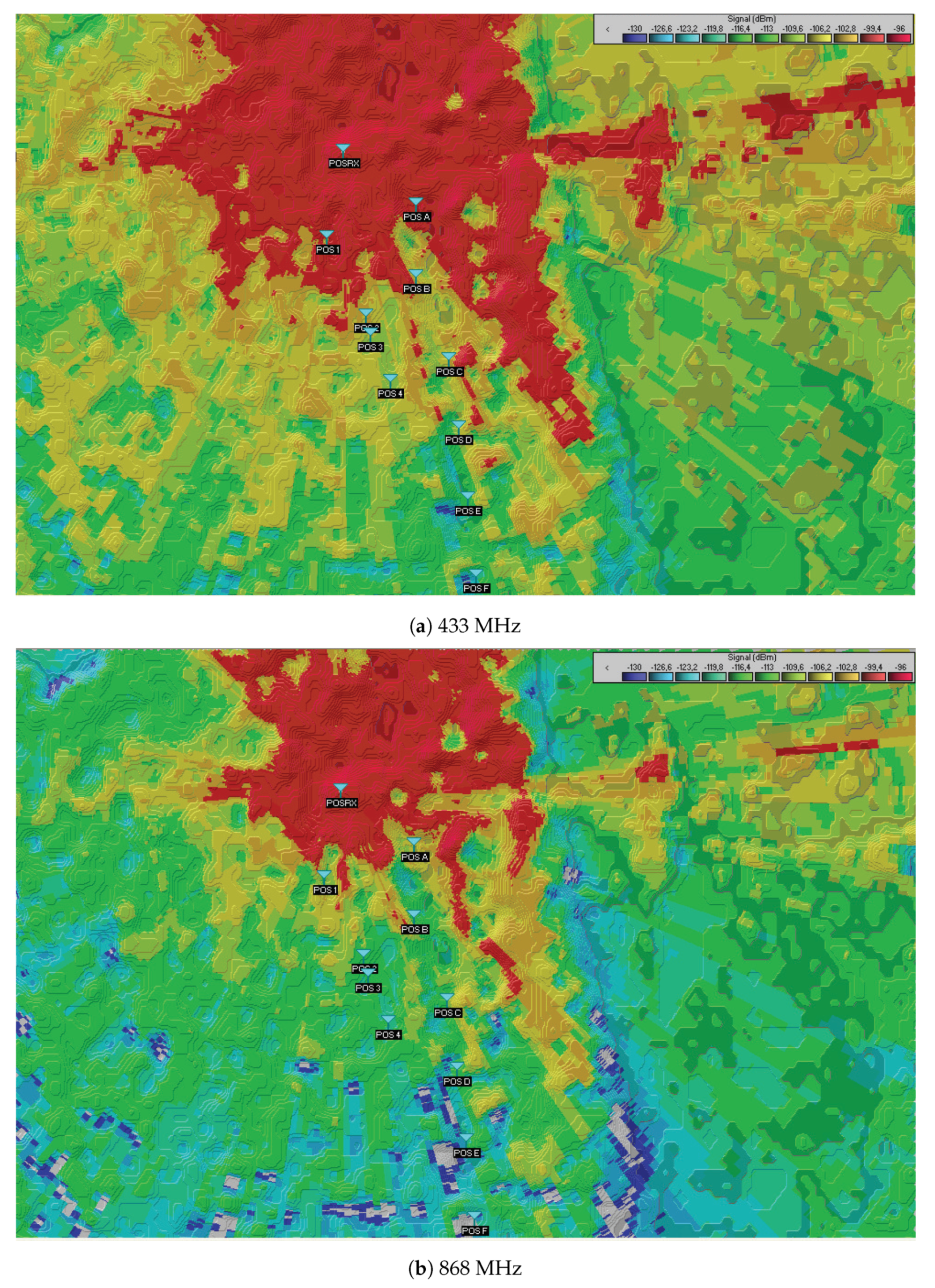
5.2. Theoretical Coverage Study
5.3. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Carnevali, L.; Pedrotti, L.; Riga, F.; Toso, S. Ungulates in Italy: Status, Distribution, Abundance, Management and Hunting of Ungulate Populations in Italy-Report 2001–2005. Biol. Cons. Fauna 2009, 117, 1–168. [Google Scholar]
- Giordano, S.; Seitanidis, I.; Ojo, M.; Adami, D.; Vignoli, F. IoT Solutions for Crop Protection Against Wild Animal Attacks. In Proceedings of the 2018 IEEE International Conference on Environmental Engineering (EE), Milan, Italy, 12–14 March 2018; pp. 1–5. [Google Scholar]
- Amici, A.; Serrani, F.; Rossi, C.M.; Primi, R. Increase in Crop Damage Caused by Wild Boar (Sus Scrofa L.): The “Refuge Effect”. Agron. Sustain. Dev. 2012, 32, 683–692. [Google Scholar] [CrossRef]
- Wang, S.W.; Curtis, P.D.; Lassoie, J.P. Farmer Perceptions of Crop Damage by Wildlife in Jigme Singye Wangchuck National Park, Bhutan. Wildl. Soc. Bull. 2006, 34, 359–365. [Google Scholar] [CrossRef]
- Hamrick, B.; Campbell, T.A.; Higginbotham, B.; Lapidge, S. Managing an Invasion: Effective Measures to Control Wild Pigs. 2011. Available online: https://digitalcommons.unl.edu/cgi/viewcontent.cgi?article=2298&context=icwdm_usdanwrc (accessed on 29 April 2021).
- Tiedemann, A.R.; Quigley, T.; White, L. Electronic (Fenceless) Control of Livestock. In Res. Pap. PNW-RP-510; US Department of Agriculture, Forest Service, Pacific Northwest Research Station: Portland, OR, USA, 1999; Volume 510. [Google Scholar]
- Ojo, M.O.; Adami, D.; Giordano, S. Network Performance Evaluation of a LoRa-Based IoT System for Crop Protection Against Ungulates. In Proceedings of the 2020 IEEE 25th International Workshop on Computer Aided Modeling and Design of Communication Links and Networks (CAMAD), Pisa, Italy, 14–16 September 2020; pp. 1–6. [Google Scholar]
- State of the IoT 2018: Number of IoT Devices Now at 7B—Market Accelerating. Available online: https://iot-analytics.com/state-of-the-iot-update-q1-q2-2018-number-of-iot-devices-now-7b/ (accessed on 17 March 2021).
- LoRa. Available online: https://lora-alliance.org// (accessed on 17 March 2021).
- LoRaWAN. Available online: https://lora-alliance.org/wp-content/uploads/2020/11/RP_2-1.0.2.pdf (accessed on 17 March 2021).
- Sigfox. Available online: https://www.sigfox.com/en (accessed on 17 March 2021).
- Ingenu. RPMA Technology. Available online: https://www.ingenu.com/technology/rpma/ (accessed on 17 March 2021).
- Weightless. Available online: https://www.weightless.com/ (accessed on 17 March 2021).
- Georgiou, O.; Raza, U. Low power wide area network analysis: Can LoRa scale? IEEE Wirel. Commun. Lett. 2017, 6, 162–165. [Google Scholar] [CrossRef]
- Adelantado, F.; Vilajosana, X.; Tuset-Peiro, P.; Martinez, B.; Melia-Segui, J.; Watteyne, T. Understanding the Limits of LoRaWAN. IEEE Commun. Mag. 2017, 55, 34–40. [Google Scholar] [CrossRef]
- Augustin, A.; Yi, J.; Clausen, T.; Townsley, W.M. A Study of LoRa: Long Range & Low Power Networks for the Internet of Things. Sensors 2016, 16, 1466. [Google Scholar]
- Sanchez-Iborra, R.; Sanchez-Gomez, J.; Ballesta-Viñas, J.; Cano, M.-D.; Skarmeta, A.F. Performance Evaluation of LoRa Considering Scenario Conditions. Sensors 2018, 18, 772. [Google Scholar] [CrossRef]
- Trasviña-Moreno, C.A.; Blasco, R.; Casas, R.; Asensio, A. A Network Performance Analysis of LoRa Modulation for LPWAN Sensor Devices. In Ubiquitous Computing and Ambient Intelligence; Springer: Berlin/Heidelberg, Germany, 2016; pp. 174–181. [Google Scholar]
- Froiz-Míguez, I.; Lopez-Iturri, P.; Fraga-Lamas, P.; Celaya-Echarri, M.; Blanco-Novoa, Ó.; Azpilicueta, L.; Falcone, F.; Fernández-Caramés, T.M. Design, Implementation, and Empirical Validation of an IoT Smart Irrigation System for Fog Computing Applications Based on LoRa and LoRaWAN Sensor Nodes. Sensors 2020, 20, 6865. [Google Scholar] [CrossRef]
- Radio Mobile Online. Available online: https://www.ve2dbe.com/rmonline_s.asp/ (accessed on 17 March 2021).
- Wang, Y.-P.E.; Lin, X.; Adhikary, A.; Grovlen, A.; Sui, Y.; Blankenship, Y.; Bergman, J.; Razaghi, H.S. A Primer on 3GPP Narrowband Internet of Things. IEEE Commun. Mag. 2017, 55, 117–123. [Google Scholar] [CrossRef]
- STD. DASH7 ALLIANCE, DASH7 Alliance Protocol Specification v1.1. Available online: https://dash7-alliance.org/#primary (accessed on 29 April 2021).
- Telensa. Available online: https://www.telensa.com/ (accessed on 17 March 2021).
- EC-GSM-IoT. Extended Coverage GSM Internet of Things. Available online: https://www.gsma.com/iot/extended-coverage-gsm-internet-of-things-ec-gsm-iot/ (accessed on 17 March 2021).
- Poole, I. Weightless Wireless M2M White Space Communications; Electronics Notes: Dorking, UK, 2015. [Google Scholar]
- Vangelista, L.; Zanella, A.; Zorzi, M. Long-Range IoT Technologies: The Dawn of LoRa™. In Future Access Enablers of Ubiquitous and Intelligent Infrastructures; Springer: Berlin/Heidelberg, Germany, 2015; pp. 51–58. [Google Scholar]
- Davcev, D.; Mitreski, K.; Trajkovic, S.; Nikolovski, V.; Koteli, N. IoT Agriculture System Based on LoRaWAN. In Proceedings of the 2018 14th IEEE International Workshop on Factory Communication Systems (WFCS), Imperia, Italy, 13–15 June 2018; pp. 1–4. [Google Scholar]
- Heble, S.; Kumar, A.; Prasad, K.V.D.; Samirana, S.; Rajalakshmi, P.; Desai, U.B. A Low Power IoT Network for Smart Agriculture. In Proceedings of the 2018 IEEE 4th World Forum on Internet of Things (WF-IoT), Singapore, 5–8 February 2018; pp. 609–614. [Google Scholar]
- Codeluppi, G.; Cilfone, A.; Davoli, L.; Ferrari, G. LoRaFarM: A LoRaWAN-Based Smart Farming Modular IOT Architecture. Sensors 2020, 20, 2028. [Google Scholar] [CrossRef]
- Valente, A.; Silva, S.; Duarte, D.; Cabral Pinto, F.; Soares, S. Low-Cost LoRaWAN Node for Agro-Intelligence IoT. Electronics 2020, 9, 987. [Google Scholar] [CrossRef]
- Yim, D.; Chung, J.; Cho, Y.; Song, H.; Jin, D.; Kim, S.; Ko, S.; Smith, A.; Riegsecker, A. An Experimental LoRa Performance Evaluation in Tree Farm. In Proceedings of the 2018 IEEE sensors applications Symposium (SAS), Seoul, Korea, 12–14 March 2018; pp. 1–6. [Google Scholar]
- Grunwald, A.; Schaarschmidt, M.; Westerkamp, C. LoRaWAN in a Rural Context: Use Cases and Opportunities for Agricultural Businesses. In Mobile Communication-Technologies and Applications; 24. ITG-Symposium; VDE: Frankfurt, Germany, 2019; pp. 1–6. [Google Scholar]
- Boursianis, A.D.; Papadopoulou, M.S.; Gotsis, A.; Wan, S.; Sarigiannidis, P.; Nikolaidis, S.; Goudos, S.K. Smart Irrigation System for Precision Agriculture-The AREThOU5A IoT Platform. IEEE Sens. J. 2020. [Google Scholar] [CrossRef]
- Kamienski, C.; Soininen, J.-P.; Taumberger, M.; Dantas, R.; Toscano, A.; Salmon Cinotti, T.; Filev Maia, R.; Torre Neto, A. Smart Water Management Platform: IoT-Based Precision Irrigation for Agriculture. Sensors 2019, 19, 276. [Google Scholar] [CrossRef] [PubMed]
- Zhao, W.; Lin, S.; Han, J.; Xu, R.; Hou, L. Design and Implementation of Smart Irrigation System Based on LoRa. In Proceedings of the 2017 IEEE Globecom Workshops (GC Wkshps), Singapore, 4–8 December 2017; pp. 1–6. [Google Scholar]
- Parri, L.; Parrino, S.; Peruzzi, G.; Pozzebon, A. A LoRaWAN Network Infrastructure for the Remote Monitoring of Offshore Sea Farms. In Proceedings of the 2020 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Dubrovnik, Croatia, 25–28 May 2020; pp. 1–6. [Google Scholar]
- Singh, R.K.; Aernouts, M.; De Meyer, M.; Weyn, M.; Berkvens, R. Leveraging LoRaWAN Technology for Precision Agriculture in Greenhouses. Sensors 2020, 20, 1827. [Google Scholar] [CrossRef] [PubMed]
- Joris, L.; Dupont, F.; Laurent, P.; Bellier, P.; Stoukatch, S.; Redouté, J.-M. An Autonomous Sigfox Wireless Sensor Node for Environmental Monitoring. IEEE Sens. Lett. 2019, 3, 1–4. [Google Scholar] [CrossRef]
- Pitu, F.; Gaitan, N.C. Surveillance of Sigfox Technology Integrated with Environmental Monitoring. In Proceedings of the IEEE 2020 International Conference on Development and Application Systems (DAS), Suceava, Romania, 21–23 May 2020; pp. 69–72. [Google Scholar]
- Zhang, X.; Andreyev, A.; Zumpf, C.; Negri, M.C.; Guha, S.; Ghosh, M. Thoreau: A Subterranean Wireless Sensing Network for Agriculture and the Environment. In Proceedings of the 2017 IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Atlanta, GA, USA, 1–4 May 2017; pp. 78–84. [Google Scholar]
- Foubert, B.; Mitton, N. Long-Range Wireless Radio Technologies: A Survey. Future Internet 2020, 12, 13. [Google Scholar] [CrossRef]
- Valecce, G.; Petruzzi, P.; Strazzella, S.; Grieco, L.A. NB-IOT for Smart Agriculture: Experiments from the Field. In Proceedings of the IEEE 2020 7th International Conference on Control, Decision and Information Technologies (CoDIT), Prague, Czech Republic, 29 June–2 July 2020; Volume 1, pp. 71–75. [Google Scholar]
- Castellanos, G.; Deruyck, M.; Martens, L.; Joseph, W. System Assessment of WUSN Using NB-IOT UAV-Aided Networks in Potato Crops. IEEE Access 2020, 8, 56823–56836. [Google Scholar] [CrossRef]
- Zhang, F.; Wan, X.; Zheng, T.; Cui, J.; Li, X.; Yang, Y. Smart Greenhouse Management System based on NB-IOT and Smartphone. In Proceedings of the IEEE 2020 17th International Joint Conference on Computer Science and Software Engineering (JCSSE), Bangkok, Thailand, 4–6 November 2020; pp. 36–41. [Google Scholar]
- He, C.; Shen, M.; Liu, L.; Okinda, C.; Yang, J.; Shi, H. Design and Realization of a Greenhouse Temperature Intelligent Control System Based on NB-IoT. J. South China Agric. Univ. 2018, 39, 117–124. [Google Scholar]
- Huan, J.; Li, H.; Wu, F.; Cao, W. Design of Water Quality Monitoring System for Aquaculture Ponds Based on NB-IoT. Aquac. Eng. 2020, 90, 102088. [Google Scholar] [CrossRef]
- Olatinwo, S.O.; Joubert, T. Enabling Communication Networks for Water Quality Monitoring Applications: A Survey. IEEE Access 2019, 7, 100332–100362. [Google Scholar] [CrossRef]
- Finnegan, J.; Brown, S. An Analysis of the Energy Consumption of LPWA-Based IoT Devices. In Proceedings of the IEEE 2018 International Symposium on Networks, Computers and Communications (ISNCC), Rome, Italy, 19–21 June 2018; pp. 1–6. [Google Scholar]
- Piromalis, D.D.; Arvanitis, K.G. Radio Frequency Identification and Wireless Sensor Networks Application Domains Integration using DASH7 Mode 2 Standard in Agriculture. Int. J. Sustain. Agric. Manag. Inform. 2015, 1, 178–189. [Google Scholar] [CrossRef]
- Naik, N. LPWAN Technologies for IoT Systems: Choice Between Ultra Narrow Band and Spread Spectrum. In Proceedings of the 2018 IEEE International Systems Engineering Symposium (ISSE), Rome, Italy, 1–3 October 2018; pp. 1–8. [Google Scholar]
- Iova, O.; Murphy, A.; Picco, G.P.; Ghiro, L.; Molteni, D.; Ossi, F.; Cagnacci, F. LoRa from the City to the Mountains: Exploration of Hardware and Environmental Factors. In Proceedings of the 2017 International Conference on Embedded Wireless Systems and Networks, Uppsala, Sweden, 20–22 February 2017. [Google Scholar]
- Villarim, M.R.; de Luna, J.V.H.; de Farias Medeiros, D.; Pereira, R.I.S.; de Souza, C.P.; Baiocchi, O.; da Cunha Martins, F.C. An Evaluation of LoRa Communication Range in Urban and Forest Areas: A Case Study in Brazil and Portugal. In Proceedings of the 2019 IEEE 10th Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), Vancouver, BC, Canada, 17–19 October 2019; pp. 0827–0832. [Google Scholar]
- Ferreira, A.E.; Ortiz, F.M.; Costa, L.H.M.; Foubert, B.; Amadou, I.; Mitton, N. A Study of the LoRa Signal Propagation in Forest, Urban, and Suburban Environments. Ann. Telecommun. 2020, 75, 333–351. [Google Scholar] [CrossRef]
- Ojo, M.O.; Giordano, S.; Procissi, G.; Seitanidis, I.N. A Review of Low-end, Middle-end, and High-end IOT Devices. IEEE Access 2018, 6, 70528–70554. [Google Scholar] [CrossRef]
- Baruffa, G.; Rugini, L.; Mecarelli, V.; Germani, L.; Frescura, F. Coded LoRa Performance in Wireless Channels. In Proceedings of the 2019 IEEE 30th Annual International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Istanbul, Turkey, 8–11 September 2019; pp. 1–6. [Google Scholar]
- Petäjäjärvi, J.; Mikhaylov, K.; Pettissalo, M.; Janhunen, J.; Iinatti, J. Performance of a Low-Power Wide-Area Network Based on LoRa Technology: Doppler Robustness, Scalability, and Coverage. Int. J. Distrib. Sens. Netw. 2017, 13, 1550147717699412. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SF | Bit Rate [kbps] | Sensitivity [dBm] |
|---|---|---|
| 7 | 5.468 | −123 |
| 8 | 3.125 | −126 |
| 9 | 1.757 | −129 |
| 10 | 0.976 | −132 |
| 11 | 0.537 | −134.5 |
| 12 | 0.293 | −137 |
| Ref. | Communication Technologies | Application | Sensors | Nature of Research |
|---|---|---|---|---|
| [27] | LoRaWAN | grape farm monitoring | soil moisture, humidity, temperature | proof-of-concept |
| [28] | LoRaWAN | maize crop monitoring | soil moisture, soil temperature, light intensity, humidity, ambient temperature and CO2 | costs and power consumption evaluation |
| [29] | LoRaWAN | vineyard and greenhouse monitoring | soil mositure, soil temperature and humidity | environmental performance analysis |
| [30] | LoRaWAN | vineyard monitoring | soil and air temperature, wind, soil water content, electrical conductivity, solar radiation, precipitation, pressure, humidity and lightning strikes count | energy consumption evaluation |
| [31] | LoRaWAN | tree farm monitoring | temperature, humidity, solar irradiance, flame sensor | environmental performance analysis |
| [32] | LoRaWAN | horse stable and agricultural land monitoring | temperature, humidity, conductivity and soil temperature | use cases analysis |
| [33,34] | LoRaWAN | irrigation control | temperature and soil moisture | experimental performance analysis |
| [35] | LoRaWAN | irrigation control | — | proof-of-concept |
| [36] | LoRaWAN | sea farm monitoring | water temperature, salinity, turbidity and pH | use cases analysis |
| [37] | LoRaWAN | tomato crop monitoring | temperature, humidity, CO2, electrical conductivity (EC) and illuminance | power consumption evaluation |
| [38] | Sigfox | climate monitoring in vineyards | temperature, humidity, and luminosity | proof-of-concept |
| [39] | Sigfox | crop monitoring | temperature, humidity, and luminosity | proof-of-concept |
| [40] | Sigfox | crop monitoring | soil moisture, soil temperature, electric conductivity and water potential | test bed |
| [42] | NB-IoT | agricultural field test | — | experimental performance analysis |
| [43] | NB-IoT | potato crop monitoring | climate and soil parameters e.g., air and ground humidity, temperature, solar radiation, pH and compaction | use cases analysis |
| [44,45] | NB-IoT | greenhouse management | temperature, humidity, light, wind | use cases analysis |
| [46] | NB-IoT | water quality monitoring system for aquaculture ponds | temperature, pH composite electrode, dissolved oxygen | experimental Performance analysis |
| [47] | Ingenu RPMA, Sigfox, LoRaWAN, NB-IoT | water quality monitoring | temperature, pH | proof-of-concept |
| [48] | EC-GSM-IoT, LoRaWAN, Sigfox, NB-IoT | energy efficiency analysis for agricultural applications | — | modelling and use cases analysis |
| [49] | DASH7 | agricultural management | — | proof-of-concept |
| [50] | Telensa, Ingenu RPMA, LoRaWAN, Sigfox | agricultural management | — | performance evaluation |
| RX | TX | |||
|---|---|---|---|---|
| MHz | 433 | 868 | 433 | 868 |
| Antenna Type | whip | whip | whip | PCB dipole |
| Antenna Gain | 4.15 dBi | 4.15 dBi | 2.15 dBi | 1 dBi |
| TX Power | — | — | 9.9 dBm | 10.4 dBm |
| Radio Module | RAK831 | RN2483 | ||
| Red Set | Green Set | ||
|---|---|---|---|
| Position | Distance[m] | Position | Distance[m] |
| POS A | 421 | POS 1 | 413 |
| POS B | 718 | POS 2 | 767 |
| POS C | 1080 | POS 3 | 860 |
| POS D | 1380 | POS 4 | 1050 |
| POS E | 1700 | ||
| POS F | 2050 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ojo, M.O.; Adami, D.; Giordano, S. Experimental Evaluation of a LoRa Wildlife Monitoring Network in a Forest Vegetation Area. Future Internet 2021, 13, 115. https://doi.org/10.3390/fi13050115
Ojo MO, Adami D, Giordano S. Experimental Evaluation of a LoRa Wildlife Monitoring Network in a Forest Vegetation Area. Future Internet. 2021; 13(5):115. https://doi.org/10.3390/fi13050115
Chicago/Turabian StyleOjo, Mike Oluwatayo, Davide Adami, and Stefano Giordano. 2021. "Experimental Evaluation of a LoRa Wildlife Monitoring Network in a Forest Vegetation Area" Future Internet 13, no. 5: 115. https://doi.org/10.3390/fi13050115
APA StyleOjo, M. O., Adami, D., & Giordano, S. (2021). Experimental Evaluation of a LoRa Wildlife Monitoring Network in a Forest Vegetation Area. Future Internet, 13(5), 115. https://doi.org/10.3390/fi13050115